Stability Analysis In a Cognitive Radio System with ...wrc-ejust.org/wp-content/uploads/c19.pdf ·...
6
2013 IEEE Wireless Communications and Networking Conference (WCNC): MAC Stability Analysis In a Cognitive Radio System with Cooperative Beamforming Mohammed Karmoose t , Ahmed Sultan t , Moustafa Youssef* t Department of Electrical Engineering, Alexandria University, Alexandria, Egypt *Wireless Research Center, Egypt-Japan Univ. of Sc. & Tech. (E-JUST) and Alex. Univ., Alexandria, Egypt Abstract-We consider a cognitive radio setting in which a relay-assisted secondary link employs cooperative beamforming to enhance its throughput and to provide protection to the primary receiver from interference. We assume the presence of infinite buers at both the primary and secondary transmitters and characterize the maximum stable throughput region exactly using the dominant system approach. Numerical examples are provided to give insights into the impact of power control on the stability region. Index Terms-Cognitive radio, cooperative beamforming, re- lay, queue stability I. INTRODUCTION Cognitive radio (CR) technology has been proposed as a potential solution to the problem of spectrum underutilization. The CR-enabled unlicensed or secondary devices may use the spectrum if they do not disrupt the operation of the licensed or primary users. In the opportunistic spectrum access (OSA) model, a secondary user utilizes the spectrum whenever a primary user is not, and vacates the spectrum upon the presence of the primary user. This coexistence strategy ensures high level of protection to the primary user while allowing the secondary user to make use of the silent periods of the primary user. In this work we investigate buffered primary and secondary users and, hence, include a queueing analysis of the proposed model. Such analysis has been considered in the study of cognitive radio networks (CRNs) under different scenarios. One of the main objectives is to characterize the achievable arrival rates of the network users which guarantee stability of all system queues. For instance, in [1], an overlay CRN consisting of a primary and secondary pairs is considered, and maximum secondary stable throughput is characterized for fixed primary throughput. The model is extended to include the insertion of a secondary relay to assist the primary transmis- sion. In [2], the model is further extended to accoנodate several secondary users which coexist with a primary link through a collision channel. Secondary users are required to comply to interference and QoS constraints of the primary user. However, the major drawback in the assumed model is that secondary users are only allowed to transmit if the primary user is not detected in the spectrum. This drastically reduces the available spectrum opportunities for the secondary network and therefore limits the achievable service rate of the secondary network. We consider in this paper a relay-assisted secondary link. Relay-based cooperative beamforming has been widely con- sidered in CRNs as a means to increase the available spectrum opportunities for single-antenna users [3], [4]. By providing secondary users with a set of assisting relays, the secondary user can utilize the spatial diversity of the relays by forming a virtual antenna array (VAA). Moreover, using the appropriate beamforming vector, secondary transmission can be nulled out at the primary receiver allowing secondary operation even when the primary user is sensed to be active. In [5], [6], a set of relays equipped with finite-sized buffers are assumed to help the secondary transmission in a cooperative beamforming manner. Scheduling is studied to manage the two phases of secondary transmissions: from secondary source to relays, and from relays to destination, while minimizing the delay in secondary user transmission. Spectrum sensing is assumed to be perfect, thereby rendering the primary receiver completely protected om interference. In this paper, we consider buffered users and a relay-assisted secondary link, but take the spectrum sensing errors into account. The secondary user is able to use the spectrum if the spectrum is vacant, or simultaneously with the primary user by applying beamforming techniques to utilize unused spatial dimensions. We aim at characterizing the maximum stable throughput region of the primary and secondary user. Fur- thermore, we assume that secondary transmission is equipped with power control capabilities in order to optimize system performance. Specifically, optimal power allocation is obtained to maximize the stable region achieved by the primary and secondary users. In order to arrive at the provided results, we resort to the concept of "dominant systems" to decouple the interacting queues and show that it provides the exact maxi- mum stable throughput region. To the best of our knowledge, this is the first study of the proposed cognitive setting om a queueing theory point of view, while avoiding unrealistic assumptions such as perfect spectrum sensing. The rest of the paper is organized as follows. Section II introduces the assumed system model. In Section III we characterize the mean service rates of both users. In Section IV we use the concept of dominant systems to perform the queueing stability analysis. We provide numerical examples to provide insights into the obtained problem formulation in Section V, and we conclude the paper in Section VI. 978-1-4673-5939-9/13/$31.00 ©2013 IEEE 637
-
Upload
nguyenhuong -
Category
Documents
-
view
215 -
download
0
Transcript of Stability Analysis In a Cognitive Radio System with ...wrc-ejust.org/wp-content/uploads/c19.pdf ·...

2013 IEEE Wireless Communications and Networking Conference (WCNC): MAC
Stability Analysis In a Cognitive Radio System with Cooperative Beamforming
Mohammed Karmooset, Ahmed Sultant, Moustafa Youssef* tDepartment of Electrical Engineering, Alexandria University, Alexandria, Egypt
*Wireless Research Center, Egypt-Japan Univ. of Sc. & Tech. (E-JUST) and Alex. Univ., Alexandria, Egypt
Abstract-We consider a cognitive radio setting in which a relay-assisted secondary link employs cooperative beamforming to enhance its throughput and to provide protection to the primary receiver from interference. We assume the presence of infinite bufl"ers at both the primary and secondary transmitters and characterize the maximum stable throughput region exactly using the dominant system approach. Numerical examples are provided to give insights into the impact of power control on the stability region.
Index Terms-Cognitive radio, cooperative beamforming, relay, queue stability
I. INTRODUCTION
Cognitive radio (CR) technology has been proposed as a
potential solution to the problem of spectrum underutilization.
The CR-enabled unlicensed or secondary devices may use
the spectrum if they do not disrupt the operation of the
licensed or primary users. In the opportunistic spectrum access
(OSA) model, a secondary user utilizes the spectrum whenever
a primary user is not, and vacates the spectrum upon the
presence of the primary user. This coexistence strategy ensures
high level of protection to the primary user while allowing the
secondary user to make use of the silent periods of the primary
user.
In this work we investigate buffered primary and secondary
users and, hence, include a queueing analysis of the proposed
model. Such analysis has been considered in the study of
cognitive radio networks (CRNs) under different scenarios.
One of the main objectives is to characterize the achievable
arrival rates of the network users which guarantee stability
of all system queues. For instance, in [1], an overlay CRN
consisting of a primary and secondary pairs is considered,
and maximum secondary stable throughput is characterized for
fixed primary throughput. The model is extended to include the
insertion of a secondary relay to assist the primary transmis
sion. In [2], the model is further extended to acconunodate
several secondary users which coexist with a primary link
through a collision channel. Secondary users are required to
comply to interference and QoS constraints of the primary
user. However, the major drawback in the assumed model
is that secondary users are only allowed to transmit if the
primary user is not detected in the spectrum. This drastically
reduces the available spectrum opportunities for the secondary
network and therefore limits the achievable service rate of the
secondary network.
We consider in this paper a relay-assisted secondary link.
Relay-based cooperative beamforming has been widely con
sidered in CRNs as a means to increase the available spectrum
opportunities for single-antenna users [3], [4]. By providing
secondary users with a set of assisting relays, the secondary
user can utilize the spatial diversity of the relays by forming a
virtual antenna array (VAA). Moreover, using the appropriate
beamforming vector, secondary transmission can be nulled out
at the primary receiver allowing secondary operation even
when the primary user is sensed to be active. In [5], [6], a
set of relays equipped with finite-sized buffers are assumed to
help the secondary transmission in a cooperative beamforming
manner. Scheduling is studied to manage the two phases of
secondary transmissions: from secondary source to relays, and
from relays to destination, while minimizing the delay in
secondary user transmission. Spectrum sensing is assumed to
be perfect, thereby rendering the primary receiver completely
protected from interference.
In this paper, we consider buffered users and a relay-assisted
secondary link, but take the spectrum sensing errors into
account. The secondary user is able to use the spectrum if the
spectrum is vacant, or simultaneously with the primary user
by applying beamforming techniques to utilize unused spatial
dimensions. We aim at characterizing the maximum stable
throughput region of the primary and secondary user. Fur
thermore, we assume that secondary transmission is equipped
with power control capabilities in order to optimize system
performance. Specifically, optimal power allocation is obtained
to maximize the stable region achieved by the primary and
secondary users. In order to arrive at the provided results, we
resort to the concept of "dominant systems" to decouple the
interacting queues and show that it provides the exact maxi
mum stable throughput region. To the best of our knowledge,
this is the first study of the proposed cognitive setting from
a queueing theory point of view, while avoiding unrealistic
assumptions such as perfect spectrum sensing.
The rest of the paper is organized as follows. Section
II introduces the assumed system model. In Section III we
characterize the mean service rates of both users. In Section
IV we use the concept of dominant systems to perform the
queueing stability analysis. We provide numerical examples
to provide insights into the obtained problem formulation in
Section V, and we conclude the paper in Section VI.
978-1-4673-5939-9/13/$31.00 ©2013 IEEE 637

K Relaying Nodes
Fig. I. The system model consists of a primary link composed of primary channel with gain Hp connecting the primary transmitter (PU-Tx) and primary receiver (PU-Rx). The secondary transmitter (SU-Tx) is linked to the secondary receiver (SU-Rx) via K relays, where Rk is the kth relay. The transmission between SU-Tx and the relays is assumed to be perfect and unaffected by the interference from PU-Tx. Channel Hsk is the channel between Rk and SU-Rx. SU-Tx overhears PU-Tx's transmission and can sense its activity. Channel Hps is the interference channel from PU-Tx to SU-Rx, whereas channel Hspk is the interference channel from Rk to PU-Rx.
II. SYSTEM MODEL
We assume the presence of a single secondary transmitter
trying to communicate with its respective receiver opportunis
tically in the presence of a primary network that consists of
a transmitter-receiver pair. The transmit power used by the
primary transmitter is Pp . The primary link operates in a time
slotted fashion. Each of the users considered are equipped with
single antennas. The primary and secondary transmitters are
both equipped with infinite buffers, Qp and Qs, respectively,
to store their data packets. The arrivals at the primary and
secondary queues are independent and identically distributed
(i.i.d) Bernoulli random variables from slot to slot with means
Ap and As, respectively. Arrival processes at the primary and
secondary buffers are statistically independent of one another.
Because of the significant pathloss to the secondary desti
nation, direct transmission from the secondary transmitter is
undecodable at the destination. Hence, the secondary source
destination communication is assisted by a relay network
of K relays which receives the packets from the secondary
transmitter and operates in a decode-and-forward fashion.
When the relays operate, their total transmit power is Ps.
Power Ps can be changed in order to control the level of
interference that may be inflicted on the primary receiver, and
such that Ps ::; Pmax. The relays are assumed to be in the
vicinity of the secondary transmitter. This allows low-power
transmission by the secondary transmitter, thereby reducing
significantly the interference inflicted on the primary link.
Moreover, due to the small pathloss from the secondary source
to the relays, the communication between them is almost error
free.
The thermal noise at each of the receivers in the system
follows a complex Gaussian distribution eN rv (0,1). We
assume that all the channels are i.i.d and follow a complex
Gaussian distribution eN rv (0,1). We adopt a slow fading
model where the channel gains remain constant over tens of
time slots. Channel estimation occurs during a tiny fraction
of the time slots via overhearing the transmissions by the
secondary and primary receivers. The secondary receiver may
transmit dedicated symbols for channel estimation at the
relays, wheres the primary receiver is assumed to transmit
automatic repeat request (ARQ) feedback to the primary trans
mitter in the form of acknowledgment (ACK) and negative
acknowledgment (NACK) packets. Due to the broadcast nature
of wireless communications, these packets can be overheard
by the relays and their received signal strength can be used
to estimate the gains of the channels between themselves and
the primary receiver. We assume that channel estimation is
perfect and that the relays forward the estimated channels to
the secondary transmitter.]
The primary user transmits the packet at the head of its
queue starting at the beginning of the time slot provided that
its queue is nonempty. The secondary transmitter senses the
channel at the beginning of the time slot in order to determine
the state of primary activity. Based on the sensing outcome,
and given its knowledge of the channel gains between the
relays and the primary and secondary receivers, the secondary
transmitter computes the precoding or beamforming vector.
It sends a data packet over a fraction of the slot duration
to the relays. The beamforming vector is incorporated within
the packet. 2 Due to the assumption of relays' vicinity to the
secondary transmitter, the packet is received correctly by the
relays. There are two possibilities for the beamforming vector
depending on the spectrum sensing outcome.
a) The primary user is sensed to be idle: In this case, the
secondary relays employ conventional transmit beamforming
to enhance the signal-to-interference-plus-noise ratio (SINR)
at the secondary receiver. The beamforming vector, Wa, is
given by:
(1)
where Hs is a column vector of length K representing the
channels between the secondary relays and the secondary
receiver, and 11.11 represents the L2-norm of a vector.
b) The primary user is sensed to be active: In this case,
the secondary transmission is still allowed provided that the
relays use a beamforming vector designed to null out the signal
at the direction of the primary receiver while maximizing
SINR at the secondary receiver. Assume that Hsp is a column
lif the channels vary more frequently, then the reduction in throughput due to the time needed for channel estimation will be considerable.
2The secondary packet is assumed to have a different size from the primary packet to accommodate the fact that it is sent via a two-hop link within a single time slot.
638

vector of length K representing the channels between the
relays and the primary receiver. Thus, the beamforming vector,
wp, is given by:
(2)
where superscript H denotes vector Hermitian, <I> = �;;,�� is the projection matrix onto vector Hsp, and I is the K x K identity matrix.
The spectrum sensing process is not perfect. The probability
of misdetecting the activity of the primary transmitter is given
by Pmd, whereas the false alarm probability, which is the
probability of sensing the primary transmitter to be busy while
it is idle, is given by Pfa'
III. QUEUE SERVICE RATES
Here, we derive the achievable service rates for both primary
and secondary queues.
A. Primary User Service Rate We can now enumerate the possible situations that can occur
in case the primary user has a packet to transmit.
1) Secondary user's queue is empty: We denote the prob
ability of Qs being empty as Pr{ Qs = O}. In this case, the
channel is used solely by the primary user. Given that the noise
variance is unity, the probability of outage, defined as the event
when the receive SINR falls below a certain threshold, is given
by
Pout,p = Pr{Pp1Hp12 < ,Bp} = 1-exp(-� ) (3) p where Hp is the primary link complex channel gain, and
,Bp is the SINR threshold for correct reception of primary
transmission. The primary service rate in this case is 1-Pout,p' 2) Secondary user's queue is nonempty and the primary
user is detected: This situation happens with a probability
equal to (1 - Pmd)Pr{Qs -I- O}, where Pr{Qs -I- O} = 1 -PI' { Q s = O}. Given that the relays use the beamforming vector
given in (2), the interference caused by secondary transmission
is eliminated at the primary receiver. Therefore, the service rate
is also given by 1 - Pout,p' 3) Secondary user's queue is nonempty and the primary
user is misdetected: This situation happens with a probability
equal to PmdPr{Qs -I- O}. Since the secondary user misdetects
the activity of the primary transmitter, the relays employ
beamforming vector Wa given in (1). We denote the outage
probability in this case by P�utp, where the superscript 'md'
denotes a situation of misdetection with the secondary trans
mission causing interference at the primary receiver. Outage
probability P�utp is given by:
md _ Pr{ PplHpl2 } Pout,p - IHn,wa12 + 1 <,Bp
The service rate is then equal to 1 - P�utp.
(4)
Based on the preceding enumeration, the primary mean
service rate, J.Lp, can be written as:
J.Lp = (1 - Pout,p) (Pr{Qs = O} + (1- Pmd)Pr{Qs -I- O}) + (1 - P�utp)PmdPr{Qs -I- O}
(5)
B. Secondary User Service Rate We enumerate the possible situations that a secondary
transmitter can find when trying to transmit. 1) Primary queue is empty and the secondary user detects
the channel to be vacant: Denoting the probability of the
primary queue being empty by Pr{Qp = O}, this case happens
with a probability (1 - pja)pr{Qp = O}. The beamforming
vector Wa is used and the outage probability of the secondary
transmission is then equal to
(6)
where ,Bs is the SINR threshold for correct reception of
secondary transmission. 2) Primary queue is empty and the secondary user finds
the channel busy: This case happens with a probability
PfaPr{Qp = O}. In this case, the secondary user is falsely led
to use the beamforming vector of the form (2). The outage
probability of the secondary link in this case, denoted by fa . .
b Pout,s' IS gIven y:
P��t,s = Pr{IH�wpI2 < ,Bs} (7)
3) Primary queue is nonempty and the secondary user detects primary activity: This case happens with a probability
(1- Pmd)Pr{Qp -I- O}, where Pr{Qp -I- O} is the probability
of the primary queue being nonempty. The outage probability
in this case is
(d) _ .{ IH,!iwp12 } Pout,s - PI PplHpsl2 + 1 <,Bs . (8)
where Hps is the complex gain of the channel between the
primary transmitter and the secondary receiver. 4) Primary queue is nonempty and the secondary user
misses primary activity: This case happens with a probability
PmdPr{Qp -I- O}. The secondary user will now use the
beamforming vector of the form (1) and the outage probability
becomes
(9)
Based on the preceding enumeration, the secondary mean
service rate, J.Ls, is given by:
J.Ls = (Pout,s (1 - Pfa) + P��t,s Pfa) Pr{ Qp = O}
+ (P��L(l - Pmd) + P�uts Pmd) Pr{ Qp -I- O} (10)
Our main objective in this paper is to characterize the
stability region defined as the set of arrival rate pairs (Ap, As) such that the system queues are stable. As is evident from (5)
and (10), Qp and Qs are interacting and their direct analysis
is intractable. Hence, we resort to the concept of dominant
systems as explained in the next section.
639

IV. STABILITY ANALYSIS USING DOMINANT SYSTEMS
An important performance measure of a communication
network is the stability of the queues. Stability can be defined
rigorously as follows. Denote by Q(t) the length of queue Q at the beginning of time slot t. Queue Q is said to be stable
if [7], [8] lim lim Pr{ Q(t) < x} = 1
(11) x--+oo t--+oo
In a multiqueue system, the system is stable when all queues
are stable. We can apply Loynes' theorem to check the stability
of a queue [9]. This theorem states that if the arrival process
and the service process of a queue are strictly stationary, and
the mean service rate is greater than the mean arrival rate of
the queue, then the queue is stable, otherwise it is unstable.
In order to analyze the interacting queues, we employ the
concept of dominant systems introduced in [10]. In a dominant
system a user transmits dummy packets if its queue is empty.
Since we have two users, we can construct two dominant
systems, one with the primary transmitter sending dummy
packet when Qp is empty and the other with the secondary
transmitter sending dummy packets when Qs is empty. We
explain below the relation between the stability region of both
the original and dominant systems.
A. First dominant system In the first dominant system, the primary transmitter sends
dununy packets when its queue is empty, whereas the sec
ondary transmitter behaves as it would in the original system.
This effectively means that Pr{ Qp = O} = O. By plugging this
probability into (10), the mean service rate for the secondary
user in this system becomes
pd _ ( (d) (1 ) + md ) f..Ls - Pout,s - Pmd Pout,s Pmd (12)
where the superscript 'pd' indicates that this secondary mean
service rate corresponds to the dominant system where the
primary queue is made to transmit dummy packets when Qp is empty. Note that in the first dominant system, the secondary
mean service rate no longer depends on the state of occupancy
of Qp. Provided that the secondary queue is stable, i.e., As < f..L�d, the probability of the secondary queue being empty is
given by:
Pr{Qs = O} = 1 - AS
d f..L� (13)
Now, by substituting with (13) and (12) in (5), we obtain the
mean service rate of the primary queue as
pd _ (1 ) As ( md ) f..Lp - - Pout,p - ---p;:rPmd Pout,p - Pout,p f..Ls (14)
Based on the construction of the first dominant system it can
be noted that the queues of the dominant system are never less
in length than those of the original system, provided that they
are both initialized identically. This is because the primary
transmitter sends dummy packets even if it does not have any
packets of its own, and therefore the transmission opportunities
for the secondary transmitter are reduced. The secondary mean
service rate is thus reduced in the dominant system and Qs
is emptied less frequently. This in turn lowers the occurrence
of the event where Qs is empty and the primary transmitter
operates freely without any interference. This reduces the
primary mean service rate. Given this, if the queues are stable
in the dominant system then they are stable in the original
system. That is, the stability conditions of the dominant system
are sufficient for the stability of the original system. Now if
Qp saturates in the dominant system, the primary transmitter
will not transmit dummy packets as it always has its own
packets to send. For As < f..L�d, this makes the behavior of the
dominant system identical to that of the original system and
both systems are indistinguishable at the boundary points.
The stability conditions of the dominant system are thus both
sufficient and necessary for the stability of the original system
given that As < f..L�d. The stability region based on the first dominant system
is given by the closure of the rate pairs Ap, As constrained
by stability of the queues. One method to characterize this
closure is to solve a constrained optimization problem to find
the maximum feasible Ap corresponding to each feasible As [8], [11]. For a fixed As, the maximum stable arrival rate of
the primary transmitter is given by the following optimization
problem:
We comment now on how the transmitted power of the
secondary network affects the service rate of the primary and
secondary users. From a secondary user's point of view, it
directly enhances the received SINR of the secondary user
and thus increases f..L�d. However, increasing the secondary
transmitted power can have two contradicting influences, with
relatively different impacts depending on the values of As and
f..L�d. On one hand, increasing the transmitted power of the
secondary user can degrade the service rate of the primary
user; in the cases where the primary user is transmitting and
the secondary user misdetects the presence of the primary user,
increasing the transmitted power introduces extra interference
levels at the primary receiver and thus degrades f..Lgd. On the
other hand, increasing the transmitted power can help the
secondary user to empty its queue faster and evacuate the
wireless link, thus enhancing f..Lgd.
B. Second dominant system In the second dominant system, the secondary transmitter
sends dummy packet when its queue is empty, whereas the
primary transmitter behaves as it would in the original system.
This means that Pr{ Qs = O} = 0 from the primary user's
point of view. Using this value in (5) gives the mean service
rate for the primary user as
where superscript 'sd' refers to the dominant system where the
secondary user is made to transmit dummy packets when Qs is
640
1 st Dominant System 1 st Dominant System 1 sl Dominant Syslem
O.37�--�--��-�--�
0.9
0.8 .' ************
•• * 0.366 .*
• * .' * *.* *.* ,. t****** *.* lit. '" Hii liE* •
*.**'
: I *
',
_
0
5 1 ::r----------t/ 0.7
pdo.6
!l S 0.5
0.4
. • . .
------ , -------------------0.3 *1
0,364
!l pd P 0,362
0.36
* A _
0.1
* As .0,35
p 1.2 s,
0.8 0.6
• I 0.358 0.2
* • : P s range for Q s stability (\ = 0.35) * * *****f*7* -*-***** * ***--** I 0.4
• * I
0.' * . 0,356 • 0.2
I
0.5 p' s 1.5
0.3540:-------7:0.5=----,.-, ------:C1.5=---------! o L--�--�--�--��� o 0.2 0.4 A 0.6 O.S
Ps S
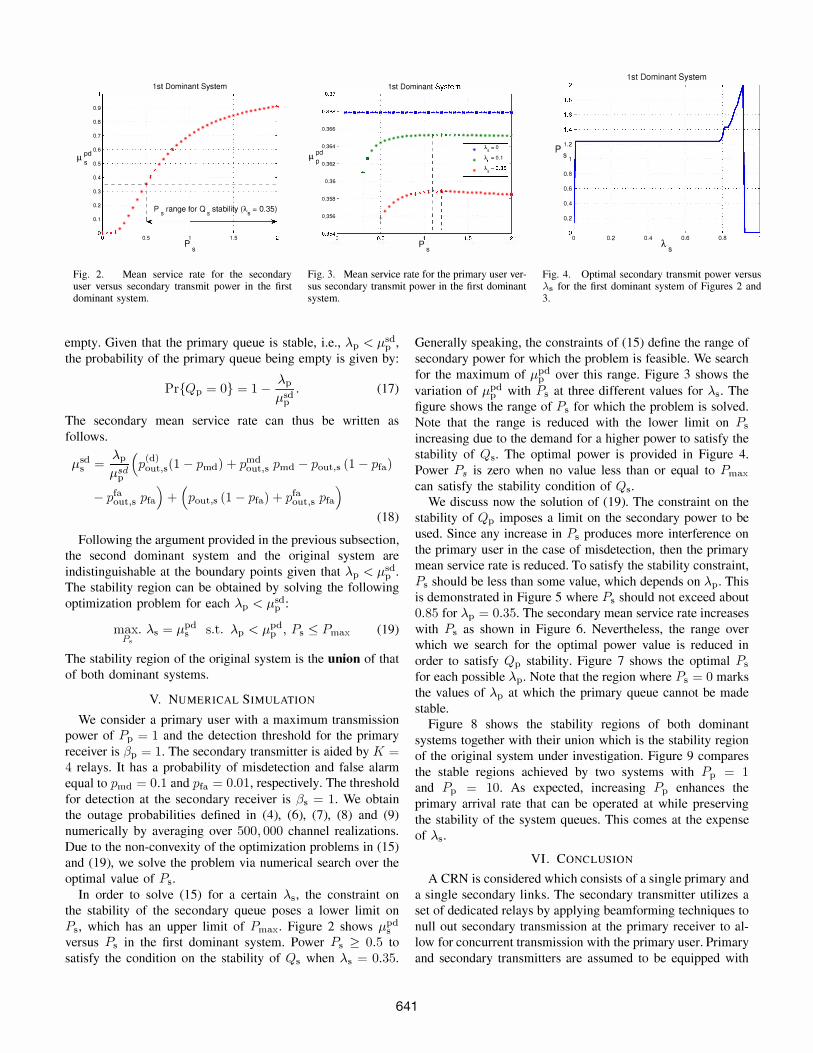
Fig. 2. Mean service rate for the secondary user versus secondary transmit power in the first dominant system.
Fig. 3. Mean service rate for the primary user versus secondary transmit power in the first dominant system.
Fig. 4. Optimal secondary transmit power versus As for the first dominant system of Figures 2 and 3.
empty. Given that the primary queue is stable, i.e., Ap < fL�d, the probability of the primary queue being empty is given by:
Pr{Qp = O} = 1- Apd . (17) fL�
The secondary mean service rate can thus be written as
follows.
sd Ap ( (d) (1 ) md (1 ) fLs = fL�d Pout,s - Pmd + Pout,s Pmd - Pout,s - Pfa
- P��t,s Pfa) + (Pout,s (1 - Pfa) + P��t,s Pfa) (\8)
Following the argument provided in the previous subsection,
the second dominant system and the original system are
indistinguishable at the boundary points given that Ap < fL�d. The stability region can be obtained by solving the following
optimization problem for each Ap < fL�d: max. As = fLfd s.t. Ap < fL�d, Ps :s; Pmax (\9)
Ps
The stability region of the original system is the union of that
of both dominant systems.
V. NUMERICAL SIM UL ATION
We consider a primary user with a maximum transmission
power of Pp = 1 and the detection threshold for the primary
receiver is f3p = 1. The secondary transmitter is aided by K =
4 relays. It has a probability of misdetection and false alarm
equal to Pmd = 0.1 and Pfa = 0.01, respectively. The threshold
for detection at the secondary receiver is f3s = 1. We obtain
the outage probabilities defined in (4), (6), (7), (8) and (9)
numerically by averaging over 500,000 channel realizations.
Due to the non-convexity of the optimization problems in (15)
and (\9), we solve the problem via numerical search over the
optimal value of PSI In order to solve (\5) for a certain As, the constraint on
the stability of the secondary queue poses a lower limit on
Ps, which has an upper limit of Pmax. Figure 2 shows fLrd versus Ps in the first dominant system. Power Ps ?: 0.5 to
satisfy the condition on the stability of Qs when As = 0.35.
Generally speaking, the constraints of (\5) define the range of
secondary power for which the problem is feasible. We search
for the maximum of fL�d over this range. Figure 3 shows the
variation of fL�d with Ps at three different values for As. The
figure shows the range of Ps for which the problem is solved.
Note that the range is reduced with the lower limit on Ps increasing due to the demand for a higher power to satisfy the
stability of Qs. The optimal power is provided in Figure 4.
Power Ps is zero when no value less than or equal to Pmax can satisfy the stability condition of Qs.
We discuss now the solution of (\9). The constraint on the
stability of Qp imposes a limit on the secondary power to be
used. Since any increase in Ps produces more interference on
the primary user in the case of misdetection, then the primary
mean service rate is reduced. To satisfy the stability constraint,
Ps should be less than some value, which depends on Ap . This
is demonstrated in Figure 5 where Ps should not exceed about
0.85 for Ap = 0.35. The secondary mean service rate increases
with Ps as shown in Figure 6. Nevertheless, the range over
which we search for the optimal power value is reduced in
order to satisfy Qp stability. Figure 7 shows the optimal Ps for each possible Ap. Note that the region where Ps = 0 marks
the values of Ap at which the primary queue cannot be made
stable.
Figure 8 shows the stability regions of both dominant
systems together with their union which is the stability region
of the original system under investigation. Figure 9 compares
the stable regions achieved by two systems with Pp = 1 and Pp = 10. As expected, increasing Pp enhances the
primary arrival rate that can be operated at while preserving
the stability of the system queues. This comes at the expense
of As. VI. CONCL USION
A CRN is considered which consists of a single primary and
a single secondary links. The secondary transmitter utilizes a
set of dedicated relays by applying beamforming techniques to
null out secondary transmission at the primary receiver to al
low for concurrent transmission with the primary user. Primary
and secondary transmitters are assumed to be equipped with
641

2nd Dominant System O,37�--�---�-'-----�--�
. 0.365 ...
0,36 sd �p 0.355
\. ---"'---------------------
..... ... ,
..... 0,35 -----..;---- - ��; - - ---.- ------
P range for Q I .... 0.345 st�bility (?. = 0.'35) : " .... ..,. .....
0.9
0.8
0.7
sd 0.6
)l S 0.5
0.4
0.3
0.2
0.'
• *
* *
: /
;0 *
2nd Dominant System
. * .
2nd Dominant System
1.S
P s
0.5
c: P )I: • 0.340:--- ----0:':.5=-------'---:-' ----:"1.5=-------:
o�. ��·-' -�--��---�--� o �--�--�--�---�-� o Ps
o 0.5 1.5 0.2 0.4 Ie p 0.6 0.8 p s
Fig. 5. Mean service rate for the primary user versus secondary transmit power in the second dominant system.
Fig. 6. Mean service rate for the secondary user versus secondary transmit power in the second dominant system.
Fig. 7. Optimal secondary transmit power versus Ap for the second dominant systems of Figures 5 and 6.
"-P 0.5
ID S�ability �egion �f the system with two Interacting queues
r--------_____ '\ O�------------------� o 0.2 0.4 "- 0.6 0.8
s
Fig. 8. Stable region of the two interacting queues system.
finite buffers, and we studied the stable region of both queues.
Sensing errors are taken into account, and their effect is shown
on the achievable stable region. We resorted to the concept
of "dominant systems" in order to decouple the interacting
queues and arrive at the provided results, and we proved
that this approach provides the exact maximum stable region.
Numerical evaluation are provided to give useful insights on
the obtained results.
VII. ACKNOWL EDGEMENT
This work has been supported in part by a grant from the
Egyptian National Telecommunication Regulatory Authority
(NTRA).
REFERENCES
[1] O. Simeone, Y Bar-Ness, and U. Spagnolini, "Stable throughput of cognitive radios with and without relaying capability," Communications, IEEE Transactions on, vol. 55, no. 12, pp. 2351-2360, 2007.
[2] J. Gambini, O. Simeone, U. Spagnolini, Y Bar-Ness, and Y Kim, "Stability analysis of a cognitive multiple access channel with primary qos constraints," in Signals, Systems and Computers, 2007. ACSSC
2007. Conference Record of the Forty-First Asilomar Conference on. IEEE, 2007, pp. 787-791.
[3] G. Zheng, S. Ma, K.K. Wong, and T.S. Ng, "Robust beamforming in cognitive radio," Wireless Communications. IEEE Transactions on, vol. 9, no. 2, pp. 570-576, 2010.
"-p
• Stability region of the system with two interacting queues (P p =
D Stability region of the system with two interacting queues (P = 1)
0.2 0.1
0 0�------0.-2------ 0- .4--- "_----0-.6------- 0 -.8----� S
Fig. 9. Stable region of the two interacting queues system for Pp = I, 10.
[4] M.A. Beigi and S.M. Razavizadeh, "Cooperative beamforming in cognitive radio networks," in Wireless Days (WD), 2009 2nd IFfP. IEEE, 2009, pp. 1-5.
[5] J. Liu, W. Chen, Z. Cao, and YJ. Zhang, "Delay optimal scheduling for cognitive radios with cooperative beamforming: A structured matrixgeometric method," Mobile Computing, IEEE Transactions on, vol. II, no. 8, pp. 1412-1423,2012.
[6] J. Liu, W. Chen, Z. Cao, and YJ.A. Zhang, "Cooperative beamforming for cognitive radio networks: A cross-layer design," Communications, IEEE Transactions on, vol. 60, no. 5, pp. 1420-1431,2012.
[7] W. Szpankowski, "Stability conditions for some distributed systems: buffered random access systems," Advances in Applied Probability, pp. 498-515, 1994.
[8] A.K. Sadek, KJ.R. Liu, and A. Ephremides, "Cognitive multiple access via cooperation: protocol design and performance analysis," IEEE
Transactions on Information Theory, vol. 53, no. 10, pp. 3677-3696, Oct. 2007.
[9] R.M. Loynes, "The stability of a queue with non-independent interarrival and service times," in Proc. Cambridge Philos. Soc. Cambridge University Press, 1962, vol. 58, pp. 497-520.
[10] R.R. Rao and A. Ephremides, "On the stability of interacting queues in a multiple-access system," IEEE Transactions on Information Theory, vol. 34, no. 5, pp. 918-930, Sep. 1988.
[11] S. Kompella, G.D. Nguyen, J.E. Wieselthier, and A. Ephremides, "Stable throughput tradeoffs in cognitive shared channels with cooperative relaying," in Proceedings IEEE INF O COM, Apr. 2011, pp. 1961-1969.
642