Some computational and algorithmic developments in
17
10.1098/rsta.2004.1418 Some computational and algorithmic developments in computational mechanics of discontinua By A. Munjiza 1 and J.-P. Latham 2 1 Department of Engineering, Queen Mary, University of London, Mile End Road, London E1 4NS, UK ([email protected]) 2 Department of Earth Science and Engineering, Imperial College London, South Kensington Campus, London SW7 2AZ, UK Published online 15 July 2004 Discontinua simulations are becoming an important part of computational mechan- ics to the extent that computational mechanics of discontinua is becoming a sepa- rate sub-discipline of computational mechanics. Among the most widely used meth- ods of computational mechanics of discontinua are discrete-element methods, com- bined finite–discrete-element methods and discontinuum deformation analysis meth- ods. A range of key algorithmic procedures is common to most of these methods. These include contact detection, explicit solvers, fracture and fragmentation models, handling of complex geometric considerations when processing interaction in three dimensions (contact kinematics) and fluid coupling. In recent years, there have been major breakthroughs in almost all of these key algorithmic aspects. These include linear contact-detection procedures (NBS, C-grid), discretized contact solutions, frac- ture and fragmentation solutions, together with fluid pressure driven fracture process and three-dimensional explicit solvers incorporating finite rotations. Many of these breakthroughs have not yet been applied across the full range of relevant discontin- uum problems. The major reason for this is that discrete-element method, discontin- uum deformation analysis and combined finite–discrete-element method publications are spread over a wide range of specialist journals and conferences. Thus in this paper, the main features of a selection of algorithmic breakthroughs are reviewed for the first time, enabling researchers in different fields to apply these compatible developments to their specific applications. Keywords: discrete elements; finite elements; contact; algorithm 1. Introduction Computational mechanics of discontinua is about developing computational solu- tions for scientific, engineering and industrial problems of discontinua. It is a rela- tively young field. The first developments took place in the late 1970s and the 1980s One contribution of 12 to a Theme ‘Discrete-element modelling: methods and applications in the environ- mental sciences’. Phil. Trans. R. Soc. Lond. A (2004) 362, 1817–1833 1817 c 2004 The Royal Society Downloaded from https://royalsocietypublishing.org/ on 20 January 2022
Transcript of Some computational and algorithmic developments in

10.1098/rsta.2004.1418
Some computational and algorithmicdevelopments in computational
mechanics of discontinua
By A. Munjiza1
and J.-P. Latham2
1Department of Engineering, Queen Mary,University of London, Mile End Road,
London E1 4NS, UK ([email protected])2Department of Earth Science and Engineering, Imperial College London,
South Kensington Campus, London SW7 2AZ, UK
Published online 15 July 2004
Discontinua simulations are becoming an important part of computational mechan-ics to the extent that computational mechanics of discontinua is becoming a sepa-rate sub-discipline of computational mechanics. Among the most widely used meth-ods of computational mechanics of discontinua are discrete-element methods, com-bined finite–discrete-element methods and discontinuum deformation analysis meth-ods. A range of key algorithmic procedures is common to most of these methods.These include contact detection, explicit solvers, fracture and fragmentation models,handling of complex geometric considerations when processing interaction in threedimensions (contact kinematics) and fluid coupling. In recent years, there have beenmajor breakthroughs in almost all of these key algorithmic aspects. These includelinear contact-detection procedures (NBS, C-grid), discretized contact solutions, frac-ture and fragmentation solutions, together with fluid pressure driven fracture processand three-dimensional explicit solvers incorporating finite rotations. Many of thesebreakthroughs have not yet been applied across the full range of relevant discontin-uum problems. The major reason for this is that discrete-element method, discontin-uum deformation analysis and combined finite–discrete-element method publicationsare spread over a wide range of specialist journals and conferences. Thus in this paper,the main features of a selection of algorithmic breakthroughs are reviewed for the firsttime, enabling researchers in different fields to apply these compatible developmentsto their specific applications.
Keywords: discrete elements; finite elements; contact; algorithm
1. Introduction
Computational mechanics of discontinua is about developing computational solu-tions for scientific, engineering and industrial problems of discontinua. It is a rela-tively young field. The first developments took place in the late 1970s and the 1980s
One contribution of 12 to a Theme ‘Discrete-element modelling: methods and applications in the environ-mental sciences’.
Phil. Trans. R. Soc. Lond. A (2004) 362, 1817–18331817
c© 2004 The Royal Society
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

1818 A. Munjiza and J.-P. Latham
(Goodman & Shi 1985; Goodman et al . 1968; Cundall 1971; Williams et al . 1985;Thornton & Barnes 1986; Preece & Taylor 1989).
Computational mechanics of discontinua complements computational mechanicsof continua. Computational mechanics of continua employs the governing equationsof continuum mechanics. It then translates these into algorithms suitable for incorpo-ration into computer codes. In this process, spatial and/or temporal discretizationsare routinely employed. The results obtained using the computer codes developedin this way are approximate solutions of the problem described by the set of gov-erning equations and initial and/or boundary conditions. Well-known methods ofcomputational mechanics of continua include finite-difference methods, finite volumemethods, finite-element methods, mesh-less methods, boundary-element methods,etc. The common characteristic of all these methods is discretization of the originalgoverning equations and application of balance principles through variational for-mulations, virtual work formulations, collocation at a point, collocation over finitesub-domains, weighted residuals, penalty-function methods or least squares methods.In all of these methods the key role is played by a constitutive law, such as
(i) stress–strain equations in problems involving deforming solids,
(ii) stress–strain-rate equations in problems involving liquids.
The common characteristic of all constitutive laws is that they are formulated interms of averaged or bulk material properties. For instance, the mass m of a materialis discontinuous, but continuous mass distribution is obtained by introducing thedensity ρ
ρ =dm
dV, (1.1)
where V is volume. The density represents average mass distribution per unit vol-ume. The microscopic discontinuous distribution of mass in space is thus replacedby an averaged macroscopic continuous mass distribution; microscopic discontinu-ous material is represented as a macroscopic continuum of density ρ. This averagematerial property is nothing more than an assumption, to make formulation of theproblem simpler. It is called the continuum assumption. A continuum assumption isin general valid as long as the characteristic length for a particular engineering prob-lem is much greater than a representative volume of the material. For instance, whena gas flow is modelled, the Navier–Stokes equations or equivalent are commonly used.For gases, the representative volume is a function of the mean free path of molecules.There is a range of problems where the mean free path of molecules is similar in sizeto the characteristic length of the problem. In such cases, the continuum assumptionbreaks down.
Engineers have noticed this especially when dealing with particulate materials.Problems associated with particulate materials are especially well demonstratedwithin the geosciences (Latham & Munjiza 2004). Phenomena associated with partic-ulates such as spontaneous stratification (Makse et al . 1997) or the ‘Brazil-nut effect’,are a direct consequence of the discontinuous nature of such materials. Computa-tional simulations of such problems must take into account the individual microstruc-tural elements of the material. This is again best illustrated with mass m, which is
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

Developments in computational mechanics of discontinua 1819
obtained as a summation over individual microstructural elements, i.e.
m =n∑
i=1
mi, (1.2)
where mi is the mass of an individual microstructural element and n is the totalnumber of microstructural elements. The individual microstructural elements canbe atoms or molecules, sand particles in sedimentation problems, concrete blocksin coastal engineering, reinforcement bars in demolition problems or even planetarybodies. A whole range of computational methods has been developed for specificproblems of discontinua. It is worth mentioning that in this paper computationalmethods are distinguished from numerical methods. By their nature, computationalmethods are numerical. However, numerical methods do not necessarily have to becomputational. Computational methods are methods tailored for digital computers,which is reflected in the way data are represented; the methods are algorithmic andsoftware engineering concepts are employed.
Computational methods developed for discontinuum simulations include the dis-crete-element method (DEM), discontinuum deformation analysis (DDA) and thecombined finite–discrete-element method (FEM/DEM).
All these methods have been developed independently from each other. They havebeen developed by engineers and scientists to solve specific problems. This collectionof papers is, as far as the authors are aware, the first time that many of thesemethods have been presented together. Much like approximate methods of continua,the methods given above share many common core algorithmic procedures. Theseinclude:
(i) contact interaction, i.e. resolving interaction between particles that are closeto each other;
(ii) contact detection, i.e. avoiding unnecessary resolution of contact between theparticles that are not in contact, thus saving CPU time and making simulationsrun faster, or enabling bigger and more complex problems to be considered;
(iii) deformability of particles, such as finite strains, finite rotations, finite displace-ments;
(iv) explicit solvers, such as the central-difference time-integration scheme;
(v) fracture and fragmentation, i.e. allowing the particles to crack, fail, fractureand/or fragment, thus creating additional degrees of freedom and additionalkinematic possibilities due to the increased number of particles and increasednumber of sliding surfaces.
In recent years there has been dramatic improvement in these core algorithmicprocedures. These include:
(i) discretized distributed potential contact interaction solutions;
(ii) linear (in terms of central processing unit (CPU) and random access memory(RAM)) contact-detection solutions (Munjiza & Andrews 1998);
(iii) efficient finite-strain formulations;
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

1820 A. Munjiza and J.-P. Latham
(iv) three-dimensional (3D) explicit solvers incorporating finite rotations;
(v) near-objective fracture and fragmentation solutions with gas flow throughcracks.
In this review, the main features of these algorithms are presented in a single paperto enable researchers to identify them for specific applications. Detailed descriptionof the algorithms is beyond the scope of this paper, but details of these and otheralgorithms, together with implementation details and source code (in the C computerlanguage) are given elsewhere (Munjiza 2004).
2. Potential contact force
Problems of discontinua comprising spherical particles enable relatively simple con-tact resolution procedures regardless of the contact interaction law. A penalty-function method is employed, with the penalty term governing the overlap betweenparticles. The penalty-function method is introduced with the aim of eliminating thedrawbacks of the Lagrange multipliers method (such as additional unknowns requir-ing iteration in each time-step, or implicit solvers with all the difficulties associatedwith assembling matrices and solving a nonlinear system of algebraic equations). Inthe penalty-function method, in order to enforce contact constraints on the boundaryΓ , an additional functional
p
∫Γ
CT(u)C(u) dΓ (2.1)
is added to the functional describing the problem to be solved (p is the penaltyparameter and u is the displacements field). The solution obtained by minimizing themodified functional satisfies the contact constraint only approximately. The largerthe value of penalty, the better the contact constraints achieved. Only with infi-nite penalty are the contact constraints satisfied exactly. Thus, the penalty-functionmethod is used either to impose an impenetrability condition in an iterative manner,or to violate this condition in such a way that correct response of the physical systemis still recovered. This is achieved by using a sufficiently large penalty term. In the-ory, with the penalty-function method, overlap between particles in contact shouldbe zero. This can be achieved only by specifying an infinite value of the penaltyparameter. In practice, the penalty parameter is always of finite value. Otherwise,the rigidity of the system would result in infinitely small time-steps.
Most discontinuum systems, especially in geoscience, environmental engineeringand similar applications involve particles that are not spherical. It has been demon-strated (Latham & Munjiza 2004) that in such problems the shape of individualparticles plays an important role. There are two aspects to shape. The first aspect isshape representation. The most promising representation of real deformable shapesinvolves discretization into finite elements. By default, such discretization is of aLagrangian type, which enables both deformed and undeformed shape to be rep-resented by the same mesh of finite elements. A discrete crack is also treated as afree surface (edge) of a finite element. For rigid particles, a ‘cheaper’ (i.e. less com-putationally demanding) approach is to use a rectangular grid and represent shapethrough definition of potential at nodes of the grid (Perkins & Williams 2001a, b).This approach is more efficient in terms of both RAM and CPU. However, these
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

Developments in computational mechanics of discontinua 1821
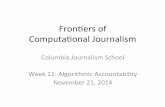
(a) (b)
Figure 1. The concept of potential contact force. (a) The shape of a body is defined in termsof potential, with boundary corresponding to zero potential. Penetration of a material point ofanother body produces a contact force which is calculated using this potential and is thereforea ‘potential’ contact force. By definition, after release of contact, mechanical work done by thecontact force is zero. This is valid for any material point penetrating a given body irrespectiveof the ‘penetration path’. (b) With spheres, potential comes naturally, as the force is a functionof distance from the centre.
advantages are lost when dealing with deformable particles. The second aspect ofshape is representation of contacts. Real-shaped particles can be concave or canhave sharp corners where there is no uniquely defined surface normal. In such situa-tions conventional point-to-point and point-to-surface contact interaction algorithmsbecome unstable. In transient dynamics problems this is manifested through numer-ical generation of energy in repeated contact and contact-release situations. Whenmodelling rock or similar brittle materials, only a small energy imbalance is enough tocreate physically impossible behaviour such as extensive fracture and fragmentation.It is worth mentioning that sometimes researchers are not even aware of the problem.This is especially the case when results obtained using black-box commercial codesare presented.
In recent years, a solution for both rigid (Perkins & Williams 2001a, b) anddeformable particles (Munjiza et al . 1997; Munjiza & Andrews 2000) has been pro-posed in the form of the ‘potential contact force’. This idea is relatively simple andinvolves definition of a contact force potential over the domain of the particle (fig-ure 1).
For spheres, the solution comes about naturally. However, for real-shaped parti-cles this requires discretization of particle domains. For rigid particles a rectangularregular grid with potentials defined at the nodes is employed. For deformable par-ticles, a Lagrangian finite-element-type grid is employed and potentials are definedfor each finite element. With both rectangular and Lagrangian grids, the contactforce obtained is distributed over the contact surface. Integration of this contactforce is best done using simplex integration. The contact area is divided into tri-angles and integration over these triangles is performed analytically. Alternatively,Gaussian integration for each triangle is performed. In both cases, exact solutionsare obtained.
Exact integration can be difficult to implement and can be very demanding com-putationally. Thus, numerical integration of contact forces is sometimes performedby specifying integration points over the surfaces of each real-shaped particle. Theaccuracy of contact resolution depends on the density of these points. The problemwith this approach somewhat resembles difficulties associated with, for instance, the
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

1822 A. Munjiza and J.-P. Latham
(a) (b)
Figure 2. The ‘pinball’ contact kinematics. It is difficult to representsliding flat contact surfaces using this approach.
‘pinball approach’ where the modelled flat surfaces are not able to slide smoothlyover each other. This is due to spurious numerical tangential forces being generatedas a result of the flat boundary being represented by an assembly of spheres thatare placed next to each other (figure 2). In problems involving fracture of brittlematerials such as rock, this can be a very serious problem due to local numericalstress fields producing non-physical fracture and fragmentation processes.
Very often real-shaped particles cannot be modelled, on the grounds of the exces-sive CPU times required to solve problems involving complex shapes. However, it isworth mentioning that the potential contact force approach works for any shape ofparticle and can be comparable in efficiency to contact interaction processing betweenspheres. The reason for this is that usually irregularly shaped particles touch eachother at just one point. Even flat particles do not always sit on each other withflat surfaces. This is best demonstrated by an example of cube-shaped particles (seeLatham & Munjiza 2004).
For deformable particles and Lagrangian finite-element grids, contact interactionprocessing is always slower than it would be if spheres were used. However, the con-tact force is a distributed contact force, which is in equilibrium with the internalstress field. In other words, the contact force is the result of elastic-plastic propertiesof the particles and not some artificial penalty parameter. Accuracy and physicalrealism of virtual systems employing such particles are necessary in many applica-tions.
3. Linear contact detection
Discontinua systems comprising a few thousand discrete particles are not a problemin terms of either RAM requirements or CPU time. Most discontinuum systemsrequire much larger numbers of particles. Systems comprising millions, even billions,of particles are becoming routinely employed in some applications.
In this context, it is very important to reduce the CPU time used to processcontact interaction. The logic behind this is very simple: most of the particle pairsare at any time so far from each other that they are not in contact, and do notexert force on each other. It is usually much faster in terms of CPU to eliminatepairs that are not in contact than it is to process contact interaction. Most often anopposite approach is adopted, and it is assumed that there are no couples of particlesin contact at any time. In order to detect couples of particles that may be in contact,contact detection is performed at each time step. The result is a contact-detectionalgorithm, or contact-detection solver.
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

Developments in computational mechanics of discontinua 1823
There are over two dozen different contact-detection algorithms reported in theliterature. According to the CPU time needed to detect all of the contacts, thesealgorithms can be classified into two major categories:
(i) nonlinear contact-detection algorithms;
(ii) linear contact-detection algorithms.
Nonlinear contact-detection algorithms are characterized by the total CPU time Tneeded to detect all contacts and given by
T > cN, (3.1)
where c is a constant and N is the total number of discrete elements. The twowell-known examples of nonlinear contact-detection algorithms include the directchecking contact-detection algorithm with
T ∝ N2, (3.2)
and the binary search algorithm with
T ∝ N log2(N). (3.3)
In both cases the total CPU time increases faster than the total number of parti-cles N . Thus, if the size of a problem is increased by eight times, the total CPUtime increases by 64 and 24 times, for direct checking and binary search algorithms,respectively.
Linear contact-detection algorithms are a relatively recent development in discon-tinuum simulations. To the authors’ knowledge, the first published linear contact-detection algorithm was the no-binary search (NBS) (Munjiza et al . 1997; Munjiza& Andrews 1998). The problem with NBS is that it is only suitable for discreteelements of similar size. This is resolved by modifying NBS to make it suitable forproblems comprising particles of general size. The result is the so-called CGRID algo-rithm (Perkins & Williams 2001a, b). Neither NBS nor CGRID use binary search;linked lists combined with space decomposition into identical cells of the same sizeare employed instead. Linked lists are used in such a way that both NBS and CGRIDcontact-detection algorithms have the total CPU time to detect all contacts givenby
T ∝ N. (3.4)This means that if the size of a problem (number of particles) increases by eight
times, the total CPU time also increases by eight times, which is three times fasterthan a binary search and eight times faster than a direct checking algorithm.
With systems comprising a small number of particles, these efficiency gains seemunimportant. However, for large systems these efficiency gains are a necessary factorthat enables such systems to be solved within reasonable CPU time constraints.
Even better CPU efficiency would be achieved by employing a contact-detectionalgorithm with the total CPU time necessary to detect all contacts given by
T ∝ Ns, s < 1. (3.5)
Such an algorithm is termed a hypolinear contact-detection algorithm. A hypolin-ear contact-detection algorithm does not yet exist and there is no proof that suchan algorithm is even possible. However, only a few years ago, the same was said oflinear contact-detection algorithms.
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

1824 A. Munjiza and J.-P. Latham
p
x
y
z
u(p)
x = f( p)
Figure 3. Deformation of a single particle in three dimensions. The deformation at a materialpoint p is defined as mapping from initial (reference) to current configuration. This mappingcan also be expressed in terms of displacements u(p). The particle shown is obtained from areal silicon rubber particle using a 3D laser scanner.
4. Finite-strain elasticity
In many problems requiring simulations using computational mechanics of discon-tinua, particles are deformable. Sometimes particles may be rubber-like. In suchcases individual particles are subject to finite strains (as opposed to small strains).Although most materials can undergo only small strains without fracturing, in dis-continuum simulations both small strain and finite-strain deformation of individualparticles are almost always coupled with finite displacements and especially finiterotations. Thus, small strain and small displacement elasticity theory is not sufficientto describe deformation of individual particles in discontinuum simulations, and for-mulation based on finite-strain elasticity is employed. This is done by discretizingindividual particles into finite elements and employing finite-strain elasticity usinga finite-element formulation. The problem with standard finite-element formulationsdeveloped in the 1990s is that they can be CPU inefficient (hyperelastic formulations)and/or non-objective (hypoelastic formulations), where for instance the volume ofindividual finite elements in large rotations (particles spinning) may not be preserved.
Thus, in the context of the combined finite–discrete-element method, a specialformulation covering both finite strains and finite rotations is developed. The formu-lation is very CPU efficient. It is based on describing deformation as a mapping:
x = f(p) = p + u(p). (4.1)
This mapping maps every material point of a particle into its current position. It is
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

Developments in computational mechanics of discontinua 1825
Figure 4. Discretization of individual particles into finite elements. Most often, a constant straintetrahedral finite element (a four-noded tetrahedron with deformation gradient being constantover the domain of the tetrahedron) is employed because of its simplicity and suitability tobe used directly for processing of contact interaction using the discretized distributed-potentialcontact-force approach. Problems associated with locking are solved by multiplicative decom-position of strain into shape-changing and volume-changing components.
called deformation and it can be written as a sum of initial position and displacementas shown in figure 3.
Discretization of individual particles produces finite elements such as the tetra-hedron finite elements as shown in figure 4.
For each tetrahedron, the initial (reference) configuration is remembered and defor-mation is expressed in terms of this initial configuration. The most CPU cost-effectiveformulation is to use a non-Cartesian coordinate system with the coordinate axiscoinciding with the edges of the tetrahedron. In such cases, the deformation gradientF is simply
F =
⎡⎢⎢⎢⎢⎢⎢⎢⎣
∂xc
∂xi
∂xc
∂yi
∂xc
∂zi
∂yc
∂xi
∂yc
∂yi
∂yc
∂zi
∂zc
∂xi
∂zc
∂yi
∂zc
∂zi
⎤⎥⎥⎥⎥⎥⎥⎥⎦
=
⎡⎣x1c − x0c x2c − x0c x3c − x0c
y1c − y0c y2c − y0c y3c − y0cz1c − z0c z2c − z0c z3c − z0c
⎤⎦ , (4.2)
where xc, yc, zc are current coordinates of a material point, while xjc, yjc, zjc,j = 0, 1, 2, 3 are current coordinates of four nodes of the tetrahedron and xi, yi, zi
represent coordinate axes (non-Cartesian coordinate system) coinciding with threeedges of the tetrahedron in the initial (undeformed) configuration. The deformationgradient is constant over the domain of the tetrahedron and is therefore obtainedsimply as the difference in current coordinates of nodes of the tetrahedron. In a sim-ilar way, the velocity gradient L is simply the difference in current velocity between
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

1826 A. Munjiza and J.-P. Latham
time
disp
lace
men
t
t − h t − h t + ht12 t + h1
2
Figure 5. The central-difference time-integration scheme: filled circles representvelocity points and empty circles represent displacement points.
the respective nodes of the tetrahedron
L =
⎡⎢⎢⎢⎢⎢⎢⎢⎣
∂vxc
∂xi
∂vxc
∂yi
∂vxc
∂zi
∂vyc
∂xi
∂vyc
∂yi
∂vyc
∂zi
∂vzc
∂xi
∂vzc
∂yi
∂vzc
∂zi
⎤⎥⎥⎥⎥⎥⎥⎥⎦
=
⎡⎣v1xc − v0xc v2xc − v0xc v3xc − v0xc
v1yc − v0yc v2yc − v0yc v3yc − v0ycv1zc − v0zc v2zc − v0zc v3zc − v0zc
⎤⎦ , (4.3)
where vxc, vyc, vzc, are current velocities of a material point, while vixc, viyc, vizc,i = 0, 1, 2, 3 are current velocities of four nodes of the tetrahedron. The deformationgradient matrix in the Cartesian coordinate system is obtained using a coordinatetransformation, which involves only nine multiplications. For moderate strains, theleft Cauchy–Green strain tensor is easily obtained as
B = FF T, (4.4)
where volume change is given by| det F |, (4.5)
which readily yields multiplicative decomposition of shape-changing and volume-changing strain. A more detailed description of this approach, together with consid-eration of constitutive laws and source code implementation, can be found elsewhere(Munjiza 2004).
5. 3D explicit solver for finite rotations
In discontinuum simulations, it is now customary to use explicit solvers. A wholerange of solvers has been employed for different simulations. The most commonlyused solver in particulate systems is the central-difference time-integration scheme.This is a one-step second-order accurate scheme, which means that, at each time-step,forces are evaluated only once (figure 5).
At each time-step, velocity v and displacement u are calculated as follows
vt+h/2 = vt−h/2 + ath,
ut+h = ut + vt+h/2h,
}(5.1)
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

Developments in computational mechanics of discontinua 1827
where h is the time-step and a is acceleration calculated from forces at current timeinstance t. This scheme has been well tested in transient problems of structuraldynamics and has been demonstrated to be a good alternative to implicit schemes.Like all explicit schemes, the central difference scheme is conditionally stable, whichmeans that the time-step employed must be smaller than a critical value derivedfrom the modal shape with highest frequency. Estimating the highest frequency is arelatively trivial task and is usually done by considering the smallest finite elementor the smallest particle.
In two-dimensional (2D) problems, both translations and rotations are integratedin the same way, because all rotations occur about the z-axis. In 3D problems, this isnot the case. Rotation of individual particles in three dimensions is governed by theinertia tensor. Each particle is characterized by the principal mutually orthogonalaxes of inertia. If a particle rotates about one of these three axes, there is a directanalogy to 2D rotations. However, most often a given particle rotates at any instanceabout an axis that does not coincide with the principal axes. In such a case, the axisof rotation changes in time without any external forces being applied to the particle.The motion sequence is therefore complicated.
In order to integrate such motion accurately, the central-difference time-integrationscheme cannot be employed directly. The modification of the scheme is necessary inorder to preserve energy and angular momentum balance. The core solution is givenby the following formula, expressing angular velocity as a function of the change inorientation of the particle and the angular momentum H
⎡⎣t+hωx
t+hωy
t+hωz
⎤⎦
=
⎛⎜⎝
⎡⎣t+hix t+hjx t+hkx
t+hiy t+hjy t+hky
+htiz t+hjz t+hkz
⎤⎦
⎡⎣Ix 0 0
0 Iy 00 0 Iz
⎤⎦
−1 ⎡⎣t+hix t+hjx t+hkx
t+hiy t+hjy t+hky
t+hiz t+hjz t+hkz
⎤⎦
⎞⎟⎠
⎡⎣tHx
tHy
tHz
⎤⎦ ,
(5.2)
where h is the time-step. The triad
(t+hi, t+hj, t+hk) (5.3)
represents mutually orthogonal unit vectors, directions of which coincide with thedirections of corresponding principal axes of inertia. The triad
(t+hi, t+hj, t+hk) (5.4)
represents mutually orthogonal unit vectors, directions of which coincide with theglobal Cartesian coordinate system. Columns of the matrix⎡
⎣t+hix t+hjx t+hkx
t+hiy t+hjy t+hky
+htiz t+hjz t+hkz
⎤⎦ (5.5)
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

1828 A. Munjiza and J.-P. Latham
are components of unit vectors of triad (5.3) in the direction of unit vectors of triad(5.4), while columns of the matrix⎡
⎣t+hix t+hjx t+hkx
t+hiy t+hjy t+hky
t+hiz t+hjz t+hkz
⎤⎦ (5.6)
are components of unit vectors of triad (5.4) in the direction of unit vectors of triad(5.3).
The vector ⎡⎣t+hωx
t+hωy
t+hωz
⎤⎦ (5.7)
represents the components of angular velocity using triad (5.4).The matrix ⎡
⎣Ix 0 00 Iy 00 0 Iz
⎤⎦ (5.8)
is the matrix of the inertia tensor using triad (5.3).The angular momentum (H) change at time t due to the external moment M is
given in a standard central difference fashion
tH =
⎡⎣tHx
tHy
tHz
⎤⎦ =
⎡⎣−tHx
−tHy
−tHz
⎤⎦ +
⎡⎣tMxh
tMyh
tMzh
⎤⎦ , (5.9)
while the change in orientation of the particle due to angular velocity ω is obtained byusing averaged angular velocity over the time step h. This averaged angular velocityis obtained from four successive approximations of angular velocity (iω, i = 1, 2, 3, 4)using the fourth-order Runge-Kutta approximation given by
ω =
⎡⎣ωx
ωy
ωz
⎤⎦ =
16
⎛⎝
⎡⎣1ωx
1ωy
1ωz
⎤⎦ + 2
⎡⎣2ωx
2ωy
2ωz
⎤⎦ + 2
⎡⎣3ωx
3ωy
3ωz
⎤⎦ +
⎡⎣4ωx
4ωy
4ωz
⎤⎦
⎞⎠ . (5.10)
It is evident that the orientation of the particle is described by the triad of threeorthonormal vectors (5.3), where only two vectors are remembered at any given timeinstance, while the third vector is calculated as a cross product of these two. Thus,orientation of a single particle is described by six numbers.
It is worth mentioning that, unlike alternative solutions which involve manipulat-ing Euler angles, the algorithm described above is ‘singularity free’. Demonstrationof the algorithm in terms of stability, accuracy and robustness is shown elsewhere(Munjiza et al . 2003b). Figure 6 shows an example of a motion sequence of tworeal-shaped particles in a rigid box. The particles are subject to initial velocity andgravity. The complicated motion sequence obtained is the consequence of both theshape of the particles and the accurate integration of rotational motion in threedimensions, which would not be possible without employing the specially modi-fied central-difference time-integration scheme as described above (see also Munjiza2004).
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

Developments in computational mechanics of discontinua 1829
Figure 6. Motion sequence of two real-shaped particles subject to gravity and initial velocityinside a rigid box. The sequence is obtained using laser-scanned particles and the integrationalgorithm described above. The realism of particles pirouetting, rocking, hitting each other andachieving the state of rest is very convincing when viewed as real-time animation. The compli-cated motion sequence obtained is due to the complicated shape of particles. This realism isonly possible because of the integration scheme employed, which properly takes into account theinertia tensor for each of the particles together with energy preservation and angular momen-tum balance. Also, the potential contact force described in the text is employed, which resultsin energy and momentum preservation, while producing accurate integration of contact forces.
6. Fracture with gas coupling
So far, algorithms dealing with contact interaction, contact detection, deformabil-ity and complicated 3D motion of the individual particles comprising discontinuumsystems have been summarized. In this section, particles that can fail, fracture andfragment are considered. This is, for instance, the case in rock blasting operations,where, under the extremely high pressure of the detonation gas, the rock deforms,fractures and fragments. Very often, this pressure is measured in gigapascals. Brittlerock subject to such high pressures deforms by the creation of a network of cracks.Gas penetrates these cracks and voids, driving the fracture and fragmentation mech-anisms even further. In the process the gas expands, cools, escapes and its pressuredrops, while the fragmented rock acquires kinetic energy and moves under inertiauntil a muck-pile is formed through interaction between individual rock fragmentsand energy dissipation mechanisms which involve fracture energy but also friction-driven energy-dissipation processes. Initially, energy dissipation is mostly due tomaterial deformation and fracture of rock. At later stages, most of the energy dis-sipation is due to friction combined with high interlocking of particles. In essence,motion of particles inside the pile becomes arrested by the particles around them, thesheer mass of the pile, and through interaction with the ground (Latham & Munjiza2004).
In the past, in the context of the combined finite–discrete-element method, theso-called smeared-fracture algorithm was employed (Munjiza 2004). The problemwith a smeared approach is that the single discrete crack is replaced with a smearedlocalization band that is similar in size to the size of the finite element employed.This approach leads to problems associated with non-objectivity in terms of energydissipation due to the fracture process, in terms of the fracture patterns obtainedand in terms of the extent of fracture (failure load). This simply means that the
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

1830 A. Munjiza and J.-P. Latham
(a) (b) (c)
Figure 7. Fracture sequence of a 2 m×2 m square block with (a) initial cut containing explosivecharge that is detonated at the bottom of the cut. (b) The stress wave is followed by crackfront propagating at approximately one-half the speed of the stress wave. (c) As the stress wavereflects from the boundary, slabbing cracks appear close to the surface, which are followed by asystem of interconnecting cracks.
failure load, energy dissipation and fracture patterns obtained are a function of thefinite-element mesh employed.
In recent years, a discrete approach to fracture has been adopted. For mode I cracks(tensile cracks) this is based on experimental stress–strain and stress–displacementcurves for rock in tension. The strain-hardening part of the stress–strain curve isimplemented using a constitutive law and a finite-element formulation. The strain-softening part of the stress–strain curve is implemented using a discrete-crackapproach, thus, in effect, replacing the stress–strain relationship with a stress–displacement relationship. This approach is objective in terms of energy dissipationin fracture processes. This objectivity is independent of element size. Objectivity interms of failure load is obtained as convergence to an exact solution occurs withdecreasing size of finite elements employed. This is a well-known standard conver-gence criterion for any finite element analysis. Convergence in terms of fracturepatterns obtained is not yet proven. Initial studies (see Munjiza & John 2001) showthat similar fracture patterns are obtained regardless of finite element size and thatthere is a convergence with decreasing element size. It is not clear from the studiesso far that the same is valid for different mesh orientations.
An example of a fracture pattern obtained using this approach is shown in figure 7.The results shown involve fracture of concrete under an explosive charge. Thus, gascoupling is employed with compressible gas flow through the cracks. A full thermo-dynamic model for the gas is employed (see Munjiza et al . 2000), producing gaspressure as a part of the simulation. It is worth mentioning that gas pressure historyis not supplied as load to the numerical model. Instead, it is obtained as a result ofthe coupled simulations which take as input only the measurable properties of theexplosive charge such as mass of explosive charge, specific detonation energy andvelocity of detonation.
An example of fracture pattern due to an impact is shown in figure 8, where aconcrete beam is impacted by a heavy block moving at initial velocity of 5.85 m s−1.Due to contact between the beam and the block, a stress wave is induced in thematerial of the beam and the beam is fragmented as shown.
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

Developments in computational mechanics of discontinua 1831
v = 5.85 m s−1
Figure 8. Fracture sequence of a concrete beam impacted by a 100 mm×100 mm×100 mm solidblock moving at initial velocity v = 5.85 m s−1. The block has a mass of 30 kg and is modelledas a linear elastic body with a modulus of elasticity E = 210 GPa and Poisson ratio ν = 0.3,while the density is increased to 30 000 kg m−3 in order to achieve the total mass of 30 kg. Thebeam is 100 mm wide, 100 mm deep and 500 mm long. The beam is supported by four triangularsupports of relatively small size. The supports are fixed. The material of the beam is concretewith a density of 2340 kg m−3, a tensile strength of 3.15 MPa, modulus of elasticity 26 GPaand Poisson’s ratio of 0.18. The results shown are obtained using 2D plane stress FEM/DEMsimulation. Colour represents a snapshot of the velocity field on a scale between green (zerovelocity) and red (10 m s−1), where brown is an intermediate velocity.
7. Concluding remarks
As explained above, it is beyond the scope of this paper to present full details orimplementation procedures for the algorithms discussed. However, they and manyothers (together with source-code implementation) can be found in Munjiza (2004).
The development of the solutions discussed above was inspired and driven bythe needs of the scientific community engaged in researching complex phenomenaassociated with discontinuum systems in geoscience, environmental engineering andgeo-engineering (see Latham & Munjiza 2004). Scientists working in these fieldshave long concluded that properties such as shape distribution, size distribution,surface roughness, moisture and cohesive effects, particle deformability and breakageand fracture play an important role in the behaviour of discontinuum systems, andthat many complex phenomena associated with discontinuum systems can only beobtained by taking these properties into account.
In addition, it has become apparent that, in order to obtain certain phenom-ena associated with discontinuum systems (such as spontaneous stratification), thesystem must comprise a critical minimum number of particles. Depending on the
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

1832 A. Munjiza and J.-P. Latham
problem, this may only be a few thousand, although more often millions, billions, oreven trillions of particles are required (rock blasting, long run-out rockslides).
Thus, there are two key issues. On the one hand is the complexity of individualparticles, and on the other is the number of particles. When combined together, thesetranslate into large RAM and CPU requirements and a need for more robust, stableand accurate solutions that can be validated easily.
Only a few years ago, it was near impossible to address these issues. With improvedhardware performance and reduced cost, it has become possible to experiment withsystems comprising billions of particles (Munjiza et al . 2003a). However, these requirenew algorithmic solutions as described in this paper. Although these solutions rep-resent a considerable improvement over what was available before, there is muchscope for further improvement. This applies to all solutions presented but especiallyto fracture, fragmentation and fluid coupling.
It is therefore the hope of the authors that the discontinuum modelling commu-nity will continue working together in the spirit of the initiative represented by thisissue. Hopefully, in five to ten years time, discontinuum simulations will be rou-tinely applied to large-scale problems starting from classical engineering disciplinesand branching out into Earth and environmental sciences. Furthermore, there willbe interesting synergy with other areas (biology, medicine, social sciences, finance)where individual-based and agent-based models are beginning to be used, and wheresome algorithms—for example, contact detection and interaction—may be transfer-able.
The authors acknowledge the contributions in this research of all people with whom they haveworked in the past: G. Mustoe, J. R. Williams, D. Preece, T. Carney, R. D. J. Owen, C. Thorn-ton, K. Richards, J. Wood, M. Blunt, P. King, R. O’Conor, P. Cleary and many others. Thecontinuing support from the EPSRC, without which these developments would never have hap-pened, is also greatly acknowledged.
References
Cundall, P. A. 1971 A computer model for simulating progressive large scale movements inblocky rock systems. In Proc. Symp. Rock Fracture (ISRM), Nancy, France, vol. I, paper11-8. Lisbon: International Society for Rock Mechanics.
Goodman, R. E. & Shi, G. H. 1985 Block theory and its application to rock engineering. Engle-wood Cliffs, NJ: Prentice Hall.
Goodman, R. E., Taylor, R. & Brekke, T. L. 1968 A model for the mechanics of jointed rock.J. Soil Mech. Found. Div. ASCE 94, 637–660.
Latham, J.-P. & Munjiza, A. 2004 The modelling of particle systems with real shapes. Phil.Trans. R. Soc. Lond. 362, 1953–1972.
Makse, H. A., Havlin, S., King, P. R. & Stanley, H. E. 1997 Spontaneous stratification in granularmixtures. Nature 386, 379–382.
Munjiza, A. 2004 The combined finite–discrete element method. Wiley.Munjiza, A. & Andrews, K. R. F. 1998 NBS contact detection algorithm for bodies of similar
size. Int. J. Numer. Meth. Engng 43, 131–149.Munjiza, A. & Andrews, K. R. F. 2000 Discretised penalty function method in combined finite–
discrete element analysis. Int. J. Numer. Meth. Engng 49, 1377–1396.Munjiza, A. & John, N. W. M. 2001 Mesh size sensitivity of the combined FEM/DEM fracture
and fragmentation algorithms. Engng Fract. Mech. 69(2), 281–295.
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022

Developments in computational mechanics of discontinua 1833
Munjiza, A., Andrews, K. R. F. & White, J. R. 1997 Discretized contact solution for com-bined finite–discrete method. In Proc. 5th ACME Conf., London, UK, pp. 96–100. London:Department of Aeronautics, Imperial College.
Munjiza, A., Latham, J.-P. & Andrews, K. R. F. 2000 Detonation gas model for combinedfinite–discrete element modelling of fracture and fragmentation. Int. J. Numer. Meth. Engng49, 1495–1520.
Munjiza, A., Bonaparte, M. & Rougier, E. 2003a Parallel, distributed and grid computing indiscontinua analysis. In Proc. ICADD-6, 6th Int. Conf. on Analysis of Discontinuous Defor-mation, Trondheim, Norway, 2003 (ed. Ming Lu), pp. 39–45. The Netherlands: Balkema.
Munjiza, A., Latham, J.-P. & John, N. W. M. 2003b 3D dynamics of discrete element systemscomprising irregular discrete elements. Int. J. Numer. Meth. Engng 56, 35–55.
Perkins, E. & Williams, J. 2001a A fast contact detection algorithm insensitive to object size.Engng Computat. 18, 48–61.
Perkins, P. & Williams, J. R. 2001b C-grid: neighbor searching for many body simulation. InProc. ICADD-4, 4th Int. Conf. on Analysis of Discontinuous Deformation, Glasgow, 2001,pp. 427–438. University of Glasgow.
Preece, D. S. & Taylor, L. M. 1989 Complete computer simulation of crater blasting includingfragmentation and rock motion. In Proc. 5th Annual Symp. Explosives and Blasting Research,New Orleans, LA. Cleveland, OH: Society of Explosives Engineers.
Thornton, C. & Barnes, D. J. 1986 Computer simulated deformation of compact granular assem-blies. Acta Mech. 64, 45–61.
Williams, J. R., Hocking, G. & Mustoe, G. G. W. 1985 The theoretical basis of the discreteelement method. In Proc. Int. Conf. Numerical Methods in Engineering: Theory and Appli-cations, Swansea, pp. 897–906. The Netherlands: Balkema.
Phil. Trans. R. Soc. Lond. A (2004)
Dow
nloa
ded
from
http
s://r
oyal
soci
etyp
ublis
hing
.org
/ on
20 J
anua
ry 2
022