
D. Todd Griffith, PhD Sandia National Laboratories WIND TURBINE BLADE MANUFACTURE 2012
Upload
audra-holmesCategory
view
225download
0
Some Applications of Automatic Differentiation to
Rigid, Flexible, and Constrained Multibody
DynamicsD. T. Griffith
Sandia National Laboratories
J. D. Turner
Dynacs
J. L. Junkins
Texas A&M University
ASME 2005 International Design Engineering Technical Conferences
September 24, 2005

2
Folk theoremThe Chain Rule, when applied by hand
recursively to even moderately dimensioned nonlinear systems, for more than two orders of differentiation, stops being fun around age 45.
Empirical Evidence: The master differentiator, James Turner tried to automate the process
completely during his late forties.

3
Presentation Outline• Introduction to Automatic
Differentiation• Modeling
• Rigid and flexible multibody systems• Constrained multibody systems
• Automatic generation of exact PDE/ODEs and BCs for hybrid systems validation of approximate solutions
• Numerical Examples

4
Comparison of Computerized Differentiation Approaches
• Symbolic Differentiation– Very useful and popular – Matlab, Maple, Mathcad,
Macsyma– Pros: Can view expressions &
control simplification/ approximation on screen
– Cons: Result in lengthy expressions and require code generation/porting/de-bugging
• Automatic Differentiation (AD)– Generally, not as well-known as
Symbolic Differentiation– Recursive, automated use of Chain
Rule … – Begins with FORTRAN, C or …code
that computes the functions to be differentiated
– ADIFOR, AD01, ADOL-C, AUTODERIVE, OCEA
– Pro: Derivatives computed & possibly coded without (*much*) user intervention
– Historical Cons: Limited order of differentiation and also, usually requires code generation
OCEA is a novel AD approach that enables 1st- through 4th-order derivatives, with zero code generation required. There are very important implications in many fields, including multi-body dynamics.

5
Overview of automatic differentiation by OCEA (1)
– OCEA (Object Oriented Coordinate Embedding Method)– Define new data structure (OCEA second-order method), for example for the
function scalar f :
– All intrinsic operators ( +, - , * , / , = ) are overloaded to enable, for example, addition and multiplication of OCEA variables. Examples:
You code: OCEA computes:
– Composite Functions (chain rule, use recursively, numerically!): You code: OCEA computes:
– Let’s take a look at an illustrative example….
2 21 2 1 2 1 2 1 2:f f f f f f f f
2 21 2 1 2 1 2 1 2 1 2 1 2 1 2* : * * * * 2 * *Tf f f f f f f f f f f f f f
2( ) :f f f f x
2
2 22
: , , : , ,Tf f f
f g f g g g f g g g g gg g g

6
Overview of automatic differentiation by OCEA (2)
• A second-order OCEA example• Suppose:
OCEA-FORTRAN
! X(1) = x, X(2) = y
Type(EB):: X(2)
Type(EB):: F1, F2, F3
Real(DP):: S_F3, JAC_F3(2), HES_F3(2,2)
! Code Functions
F1 = X(1)**3 + X(2)
F2 = (X(2)**2)*sin( X(1) )
F3 = F1 + F2
S_F3 = F3 ! Extract function
JAC_F3 = F3 ! Extract Jacobian (2x1)
HES_F3 = F3 ! Extract Hessian (2x2)
Declare OCEA independent variables , type EB
Declare OCEA dependent variables, type EB
Declare function and partial derivative arrays , type DP
Code functions
Extract partial derivative
information
2 23 1 2 1 2 1 2
23 3 3
:
:
f f f f f f f
f f f
function Jacobian Hessian
We desire tocompute f3 and most
importantly its partials:
3 21 2 3 1 2, sin( ),f x y f y x and f f f
2 23 33
22 2 2
2 23 3 3
2
3 cos 6 sin 2 cos,
1 2 sin 2 cos 2sin
f ffx x yx y x x y x y xx
f y x y x xf fy x y y
You never had to derive, code, or debug:

7
Equation of motion formulation using automatic differentiation
Lagrange’s equations:
Td L LC
dt
Q λq q
C q bsubject to
Lagrangian:
T, V: kinetic and potential energy
q: generalized coordinates
Q: generalized force
C(q): constraint Jacobian matrix
: Lagrange multipliers
L T V
Of course, many choices for equation of motion formulation exist.
The OCEA approach is broadly applicable, however, the utility of automatic differentiation can be immediately seen and appreciated for implementing Lagrange’s Equations…

8
Implementation of Lagrange’s Equations:
A Direct Approach (1)
Td T LC
dt
Q λq q
2 2
j ji i j i j
d T T Tq q
dt q q q q q
2
iji j
TM m
q q
2
iji j
TM m
q q
Td L LC
dt
Q λq q
L
C
L
q
Q
Automatic Differentiation (AD)
Specified & coded
AD or specified & coded
Many numerical methods
AD or specified & coded
Mass matrix and its time derivative extracted as second-order Automatic Differentiation of T …

9
Implementation of Lagrange’s Equations:
A Direct Approach (2)2
iji j
TM m
q q
2
iji j
TM m
q q
( , )t q 0
( , )t C Ct t
q q = q 0q q
TLM M C
q + q Q λq
-1 TLM M C
q = q + Q λ
q
Can also compute constraint matrix, C, automatically for holonomic type constraint.
Now forming the equations:
Accelerations computed after generating or prescribing all terms here. Now, can proceed with numerical integration…….

10
Illustrative Example: Spring Pendulum (1)
L T V 2 2 212 ( )T m r r
210 02 ( ) ( cos )V k r r mg r r
2
( ) iji j
TM m
q q
q
2
( ) iji j
TM m
q q
q
-1 TLM M C
q = q + Q λ
q
r
θ
Lagranges Eqs:
Directly invoke ODE solver in OCEA to get solution W/O hand derivation, coding, or checkout … only derive & code T, V

11
Spring Pendulum (2)SUBROUTINE SPRING_PEND_EQNS( PASS, TIME, X, DXDT, FLAG )
USE EB_HANDLINGIMPLICIT NONE
****************************************!.....LOCAL VARIABLES
TYPE(EB)::L, T, V ! LAGRANGIAN, KINETIC, POTENTIALREAL(DP):: M, K ! MASS AND STIFFNESS VALUESREAL(DP), DIMENSION(NV):: JAC_LREAL(DP), DIMENSION(NV,NV):: HES_L
****************************************! X(1) = Q(1) = R, X(2) = Q(2) = THETA, X(3) = dR/dt, X(4) = dTHETA/dtR0 = 0.55D0GRAV = 9.81D0T = 0.5D0*M*(X(3)**2 + X(1)**2*X(4)**2) ! DEFINE KEV = 0.5D0*K*(X(1)-R0)**2 + M*GRAV*(R0-X(1)*COS(X(2))) ! DEFINE PEL = T – V ! DEFINE LAGRANGIAN FUNCTION
JAC_L = L ! EXTRACT dL/(dq,dqdot)JAC_L_Q = JAC_L(1:NV/2) ! EXTRACT dL/dq
HES_L = L ! EXTRACT 2nd ORDER PARTIALS OF LAGRANGIANMASS = HES_L(NV/2+1:NV,NV/2+1:NV) ! EXTRACT MASS MATRIXMASSDOT = HES_L(NV/2+1:NV,1:NV/2) ! EXTRACT MDOT! QDOTDOT = INV(MASS)*(- MASSDOT*Q + JAC_L_Q ) ! SEE PAPER …
****************************************DXDT(1)%E = X(3)%E ! RDOTDXDT(2)%E = X(4)%E ! THETADOTDXDT(3)%E = QDOTDOT(1) ! RDOTDOTDXDT(4)%E = QDOTDOT(2) ! THETADOTDOT
END SUBROUTINE SPRING_PEND_EQNS

12
Geometry of Multiple Flexible Link Configuration
Note from the figure of a series of deformed links that the local coordinate frames attached to the links are defined such that the elastic deformation vanishes at the endpoints. This choice greatly simplifies the “downstream” velocity expressions.
1
1̂j
1̂i
ˆp+1j
2
2̂iˆ
2j
1p
ˆp+1i

13
Kinetic Energy Generalization for Flexible Links
1
1 1 1 1 1 1 1 10
1( ) ( , ) ( , )
2
pL
p p p p p p p pT x x t x t dx
r r
1 1
11 1 1 1 12
1 1 1
11 1 1 1 1 1 12
1 1
21 11 1 1 1 1 1 12 2
( , , , )
cos sin
cos cos
p p
p p pT
p i i j j j i p p p i i p ii j i
p pT
p p i i p i p p p i i p ii i
T T
p p p p p p p
T T
m L L L
L m L L
M M
q q θ θ
q b
q b
q q q q
2 211 1 1 1 1 16
T
p p p p p pm L q a
Assumed Modes Method used to transform the kinetic energy expression into a form which can be tamed by Lagrange’s Equations. The details can be found in the paper.
Along with the potential energy expression, we can define the Lagrangian and proceed to generate the equations of motion…………..

14
Example: Closed-chain 5-link Manipulator (1)
5cos( )
15
sin( )1
L Di ii
Li ii
φ = 0
The Lagrangian expressions are developed for each link and summed to form the total system Lagrangian.
Additionally, we specify two holonomic constraints of the form:
And, we specify damping at all joints with the exception of the base end of link 5.
OCEA automatically generates the equations of motion for the constrained
system
5 link manipulator g D
1
2
3
4
5

15
Example: Closed-chain 5-link Manipulator (2)

16
Example: 4-link Planar Truss (1)
Y
4cos( )
14
sin( )1
Li ii
Li ii
φ = 0
The Lagrangian expressions are developed for each link and summed to
form the total system Lagrangian.
Now, we consider translation as well.
Additionally, we specify two holonomic constraints of the form:
OCEA automatically generates the equations of motion for the constrained
system
4-link planar truss with “springs” across diagonal
X
1
2
3
4
17
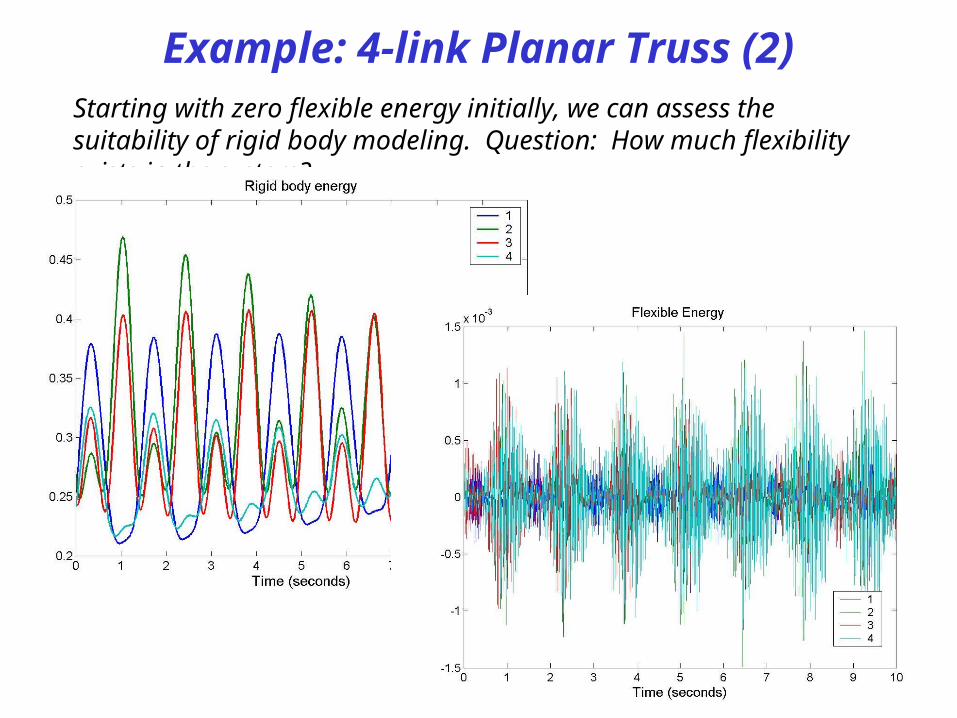
Example: 4-link Planar Truss (2)Starting with zero flexible energy initially, we can assess the suitability of rigid body modeling. Question: How much flexibility exists in the system?

20
Accuracy of Solutions: Comparison with Hard-coded Equations of Motion for Flexible
Double Pendulum(1)
Angular coordinates and angular velocities

21
Accuracy of Solutions: Comparison with Hard-coded Equations of Motion
for Double Pendulum(2)
Flexible coordinates for link one

22
Methods for Validating Solution Accuracy
1) Testing special cases that have exact analytical solutions
2) Evaluation of error in exact motion integrals
3) The method of manufactured solutions
4) The method of “nearby problems”
Method #1 is a standard approach to validating solution accuracy. Here we look at a simple system which has an exact analytical solution.
Methods #3 and #4 rely upon computing analytical source terms (fictitious generalized forces) by inverse dynamics which define a benchmark problem for validation studies. The difference is that with method #3 a benchmark solution is chosen a priori and may have no important physical meaning. With method #4, a benchmark solution is constructed as a neighbor of a candidate approximate solution for the motion being studied and thus has physical meaning.
27
Addendum to JLJ Folk Theorem
Generating the exact ODE/PDE and boundary conditions for a distributed parameter system
by hand or symbolic manipulation stops being fun at
age 29!

28
Generating Exact PDE/ODEs and BCs for Many Body Distributed Parameter
Systems1 0
2
2
0
ˆ
ˆ ˆ ˆ ˆˆ
' ''
ˆ ˆ
' ''
( ) ( )
i
i
ln
D i i Bi
T
Ti i i ii
i i i ii i
l
i ii
ii i
B B
i i i i
L L dx L
d
dt
L L L Ld
dt v v x xv v
L Lv
xv v
d
v l dt v l
Qq q
f
L
L L
L L 1
2
0
ˆ( ) ( ) 0
ˆ ' ' 'ˆ( ) ( ) 0'' ' '( ) ( )
i
Ti i i i i
l
Ti B Bi i i i i i
i i i i i
v l v l
L dv v l v l
dtv v l v l
f
f
L L
Lagrangian:
Discrete/ODE:
Flexible/PDE:
BCs:
You code this.
OCEA/AD computes these.
31
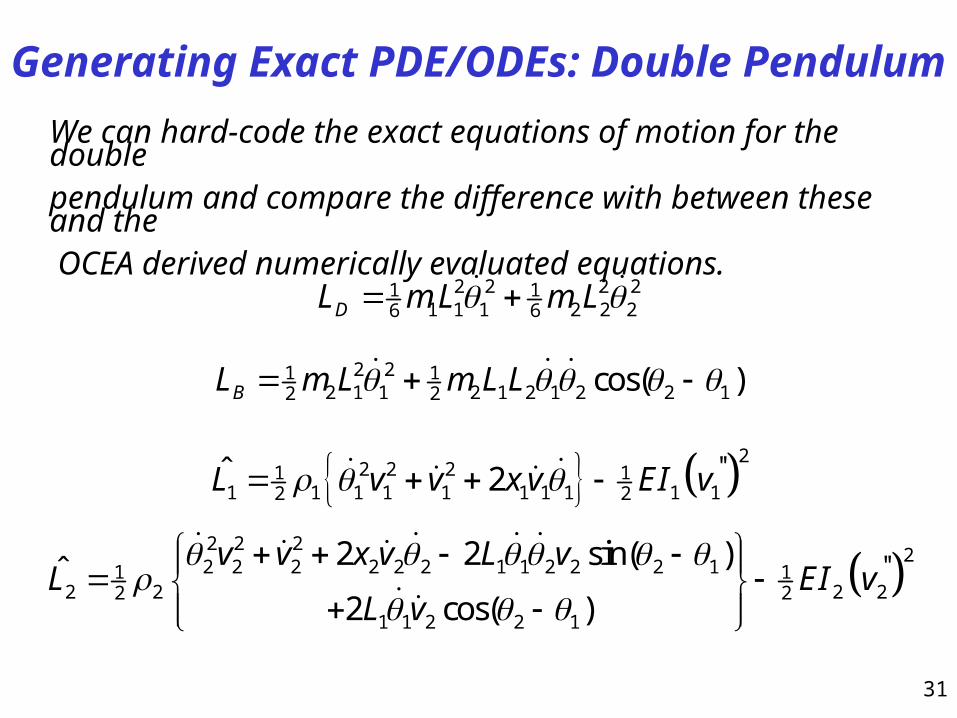
Generating Exact PDE/ODEs: Double Pendulum
We can hard-code the exact equations of motion for the doublependulum and compare the difference with between these and the OCEA derived numerically evaluated equations.
2 2 2 21 11 1 1 2 2 26 6DL m L m L
2 21 12 1 1 2 1 2 1 2 2 12 2 cos( )BL m L m L L
22 2 21 1
1 1 1 1 1 1 1 1 1 12 2''ˆ 2L v v x v EI v
2 2 2
22 2 2 2 2 2 1 1 2 2 2 11 1
2 2 2 22 2
1 1 2 2 1
''2 2 sin( )ˆ2 cos( )
v v x v L vL EI v
L v

32
Errors in ODEs: Double Pendulum

33
Errors in PDEs: Double Pendulum
Link one
Link two

34
Summary and Conclusions
•Automatic Differentiation has broad potential in Dynamics and Control
• Automating differentiation by operator overloading is a beautiful idea whose time has come – the applications are endless!
• Ideal for implementing Lagrange’s Equations – this presentation provides some simple illustrations – a few important first steps along the path.
• No hand derivation effort beyond code specifying the building of the Lagrangian, constraints and external forces is required.
• OCEA also gives rise to new methods for solving differential equations – the time derivative computations can be automated, so that formal analytical continuation is easily done in lieu of traditional Runge-Kutta methods, for example.
• Can automatically derive systems of PDEs and BCs for use in validating the accuracy of approximate solutions of flexible systems corresponding to the same modeling assumptions?


















