
1 EJB 2.0 : An Overview CS486 Spring 2001 Vijayanand Bharadwaj.

Solving Problems by
Searching
CS 486/686: Introduction to Artificial Intelligence
1

Announcements
• Enrollment: Wait list, Grads
• Projects
• Undergrads: Groups of 3
• Grads: Solo
• Stuck for ideas? Talk to us!
• My Office: DC 2306B (Accessed through AI Lab)
• Slide versions2
Previously on CS 486
• Fully Observable vs Partially
Observable
• Deterministic vs Stochastic
• Episodic vs Dynamic
• Discrete vs Continuous
• Single agent vs Multi agent
3

Introduction
• Search was one of the first topics
studied in AI
- Newell and Simon (1961) General Problem
Solver
• Central component to many AI systems
- Automated reasoning, theorem proving,
robot navigation, scheduling, game
playing,...
4
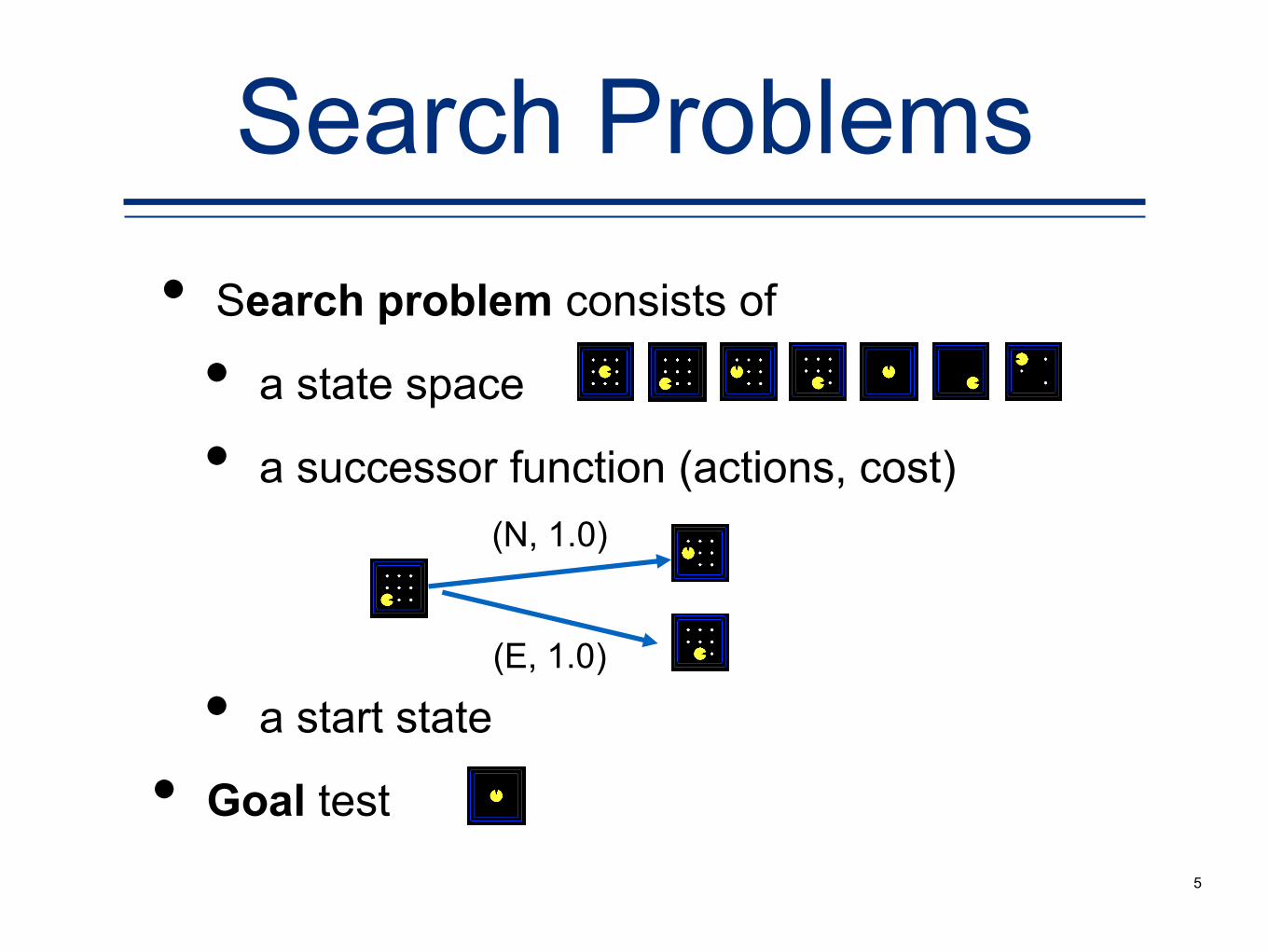
Search Problems
• Search problem consists of
• a state space
• a successor function (actions, cost)
• a start state
• Goal test
(N, 1.0)
(E, 1.0)
5

Search Problems
• Path: a sequence of states and operators
• May be associated with a cost c
• Solution: a sequence of actions from the start
state to a goal state
• Optimal solution: a path with minimum cost
…
6

Example: Traveling in Romania
Start
End
•States:
•Initial State:
•Successor Function:
•Goal test:
•Solution:
7

Examples of Search Problems
•States:
•Initial State:
•Successor Function:
•Goal test:
•Solution:
•States:
•Initial State:
•Successor Function:
•Goal test:
•Solution:8

Examples of Search Problems
9

Our Definition Excludes...
Chance
Continuous states
All of the above
Partial
Observability
Adversaries
10
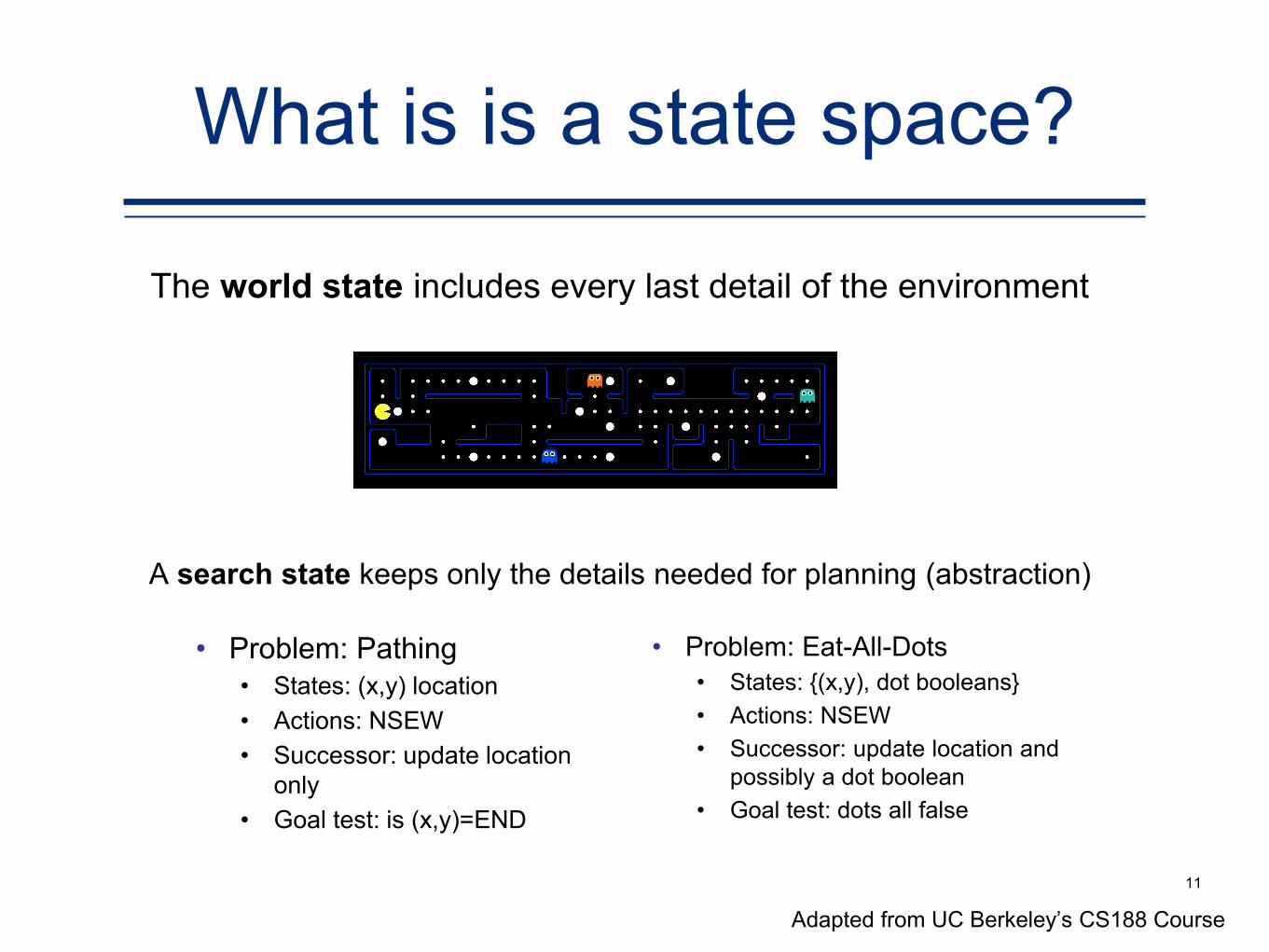
What is is a state space?
The world state includes every last detail of the environment
A search state keeps only the details needed for planning (abstraction)
• Problem: Pathing
• States: (x,y) location
• Actions: NSEW
• Successor: update location
only
• Goal test: is (x,y)=END
• Problem: Eat-All-Dots
• States: {(x,y), dot booleans}
• Actions: NSEW
• Successor: update location and
possibly a dot boolean
• Goal test: dots all false
Adapted from UC Berkeley’s CS188 Course
11

Representing Search
• State space graph
- Vertices correspond to states
(one vertex for each state)
- Edges correspond to
successors
- Goal test is a set of goal nodes
• We search for a solution by
building a search tree and
traversing it to find a goal
state
S
G
d
b
pq
c
e
h
a
f
r
12

Search Tree
• A search tree:
• Start state is the root of
the tree
• Children are successors
• A plan is a path in the tree.
A solution is a path from
the root to a goal node.
• For most problems we do
not actually generate the
entire tree
S
B
A
G
S
A B
GB G
G13

Quiz
• Given this state graph, how large is the
search tree?
S
B
A
G
14

Expanding Nodes
• Expanding a node
- Applying all legal operators to the state
contained in the node
- Generating nodes for all corresponding
successor states
15

Example: Traveling in Romania
Start
End
16

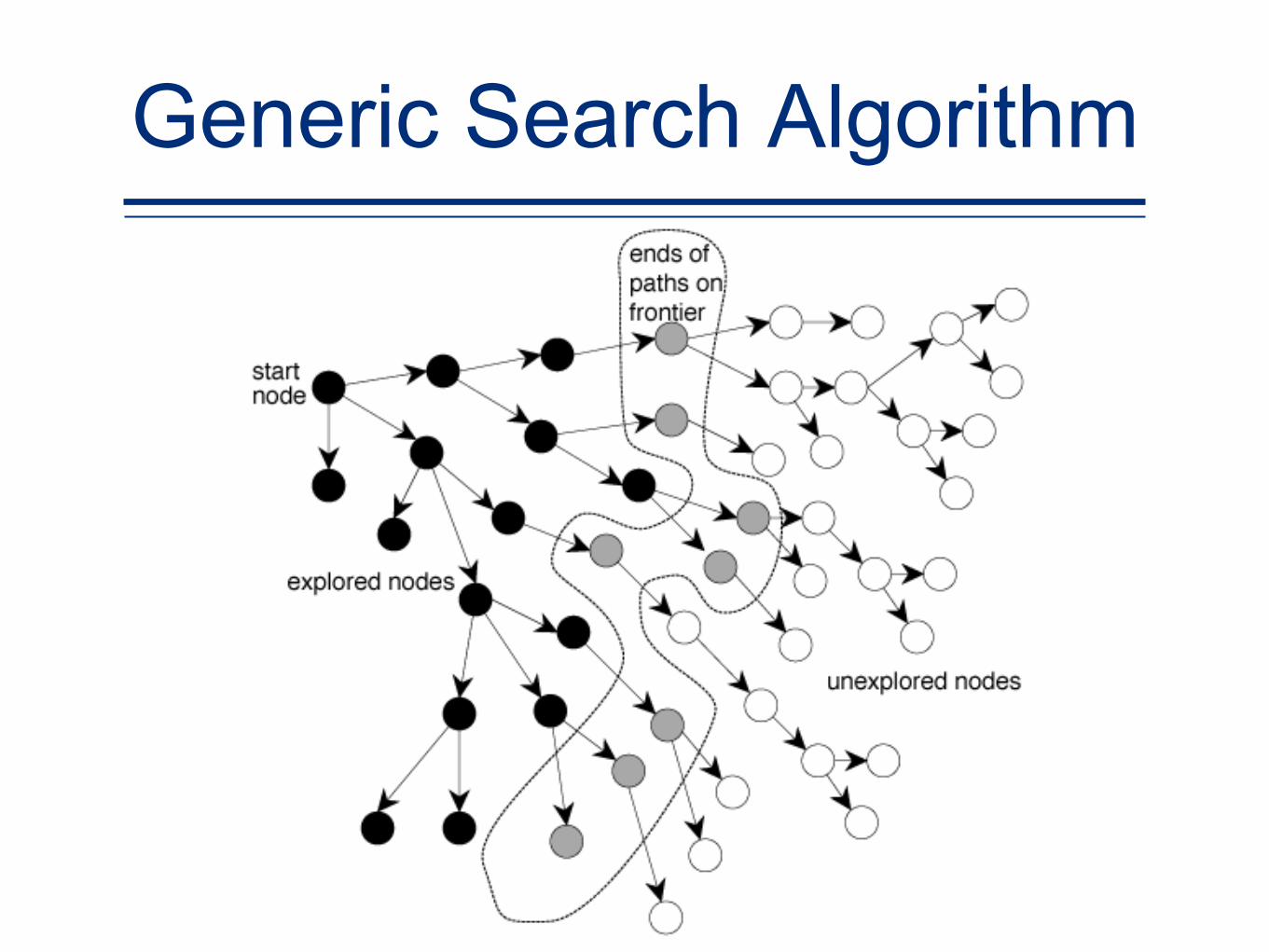
Generic Search Algorithm
• Initialize with initial state of the problem
• Repeat
- If no candidate nodes can be expanded return failure
- Choose leaf node for expansion, according to search
strategy
- If node contains goal state, return solution
- Otherwise, expand the node. Add resulting nodes to the
tree
17
Generic Search Algorithm

Implementation Details
19
• Need to keep track of nodes to be expanded (frontier)
• Implement using a queue:
0. Insert node for initial state

Implementation Details
20
• Need to keep track of nodes to be expanded (frontier)
• Implement using a queue:
0. Insert node for initial state
• Repeat
1. If queue is empty, return failure
2. Dequeue a node
Implementation Details
21
• Need to keep track of nodes to be expanded (frontier)
• Implement using a queue:
0. Insert node for initial state
• Repeat
1. If queue is empty, return failure
2. Dequeue a node
3. If node contains goal state, return solution
4. Expand node

Implementation Details
22
• Need to keep track of nodes to be expanded (frontier)
• Implement using a queue:
0. Insert node for initial state
• Repeat
1. If queue is empty, return failure
2. Dequeue a node
3. If node contains goal state, return solution
4. Expand node
• Search algorithms differ in their queuing function!
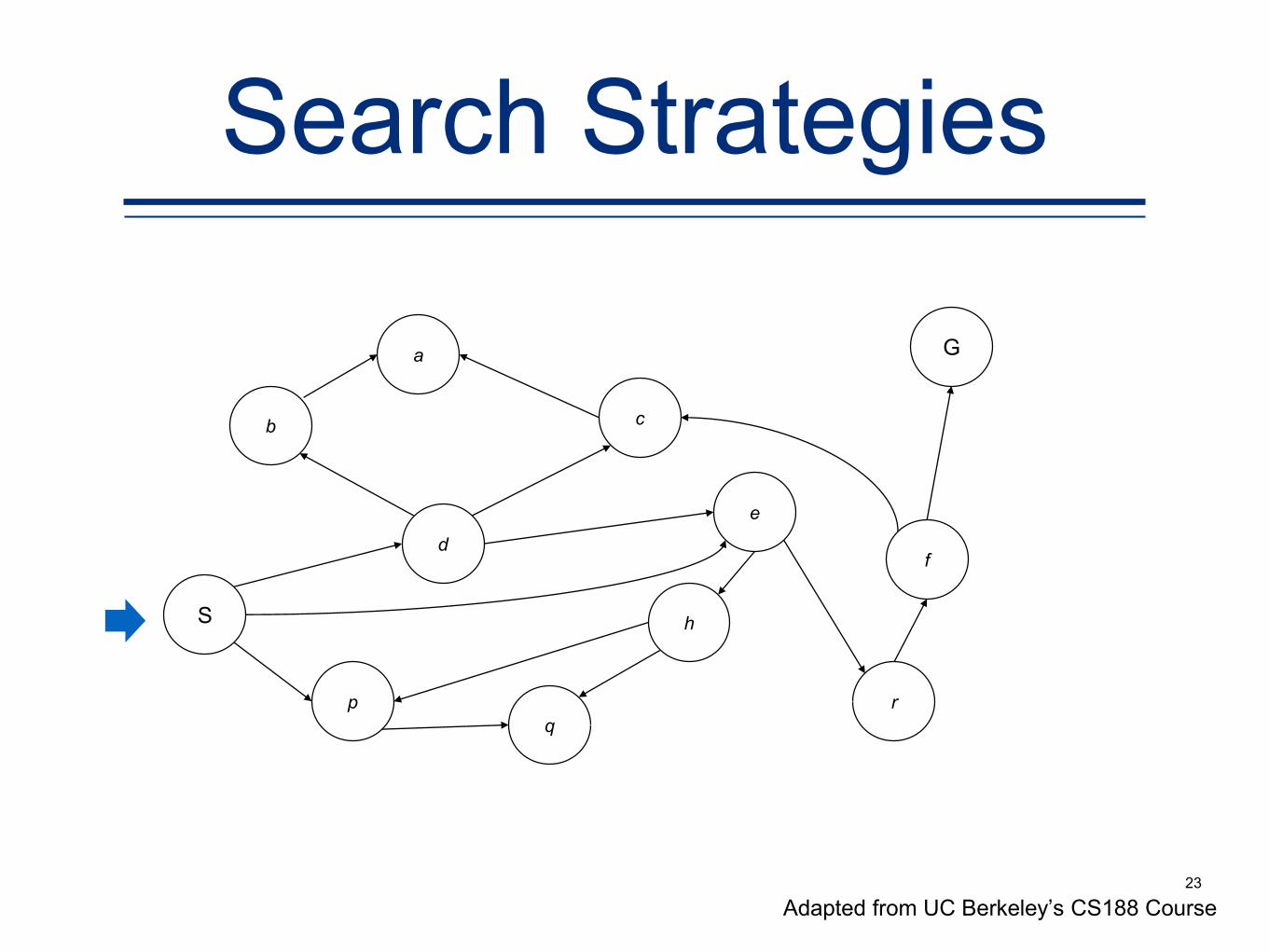
Search Strategies
S
G
d
b
p
q
c
e
h
a
f
r
Adapted from UC Berkeley’s CS188 Course
23

Search Strategies
S
a
b
dp
a
c
e
p
h
f
r
q
q c G
a
qe
p
h
f
r
q
q c G
a 24

Depth-First Search
S
G
d
b
p q
c
e
h
a
f
r
Strategy: Expand deepest node first
Implementation: LIFO stack
25
S
a
b
d p
a
c
e
p
h
f
r
q
q c G
a
qe
p
h
f
r
q
q c G
a

Depth-First Search
S
G
d
b
p q
c
e
h
a
f
r
Strategy: Expand deepest node first
Implementation: LIFO stack
26
S
a
b
d p
a
c
e
p
h
f
r
q
q c G
a
qe
p
h
f
r
q
q c G
a

Key Properties
•Completeness: Is the alg. guaranteed to find a
solution if the solution exists?
•Optimality: Does the alg. find the optimal solution?
•Time complexity
•Space complexity (size of the fringe) …
b1 node
b nodes
b2 nodes
bm nodes
m tiers
b: branching factor
m: maximum depth
d: depth of shallowest goal node
Number of nodes in tree? 1+b+b2+…+bm=O(bm)27

DFS Properties
•Complete?
•Optimal?
•Time complexity
•Space complexity
…
b
1 node
b nodes
b2 nodes
bm nodes
m tiers
28
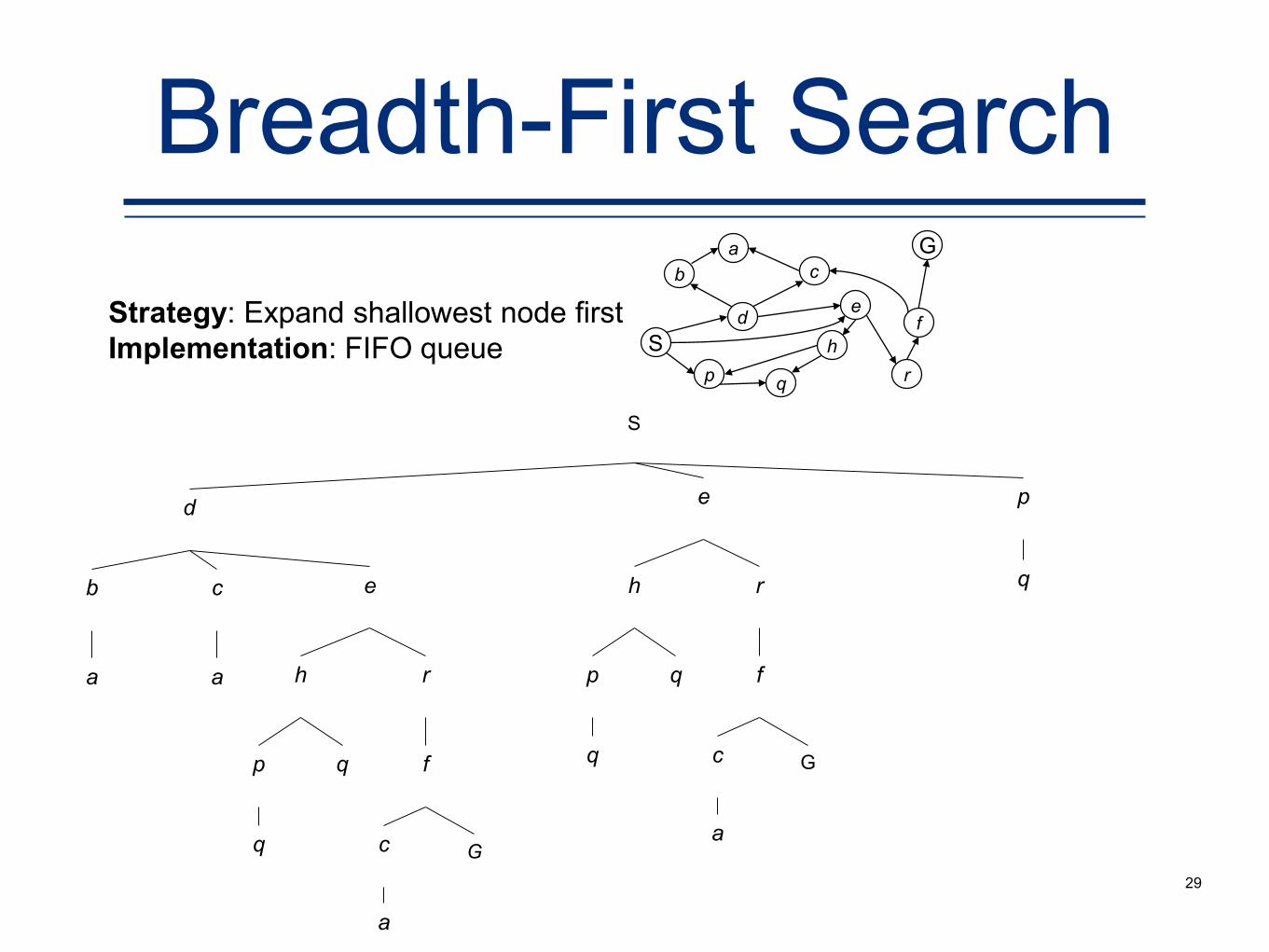
Breadth-First Search
S
G
d
b
p q
c
e
h
a
f
r
Strategy: Expand shallowest node first
Implementation: FIFO queue
29
S
a
b
dp
a
c
e
p
h
f
r
q
q c G
a
qe
p
h
f
r
q
q c G
a

Breadth-First Search
S
G
d
b
p q
c
e
h
a
f
r
Strategy: Expand shallowest node first
Implementation: FIFO queue
30
S
a
b
dp
a
c
e
p
h
f
r
q
q c G
a
qe
p
h
f
r
q
q c G
a

BFS Properties
•Complete?
•Optimal?
•Time complexity
•Space complexity
…
b
1 node
b nodes
b2 nodes
bm nodes
m tiers
31
depth d

Quiz: DFS vs BFS
…b
…b
32
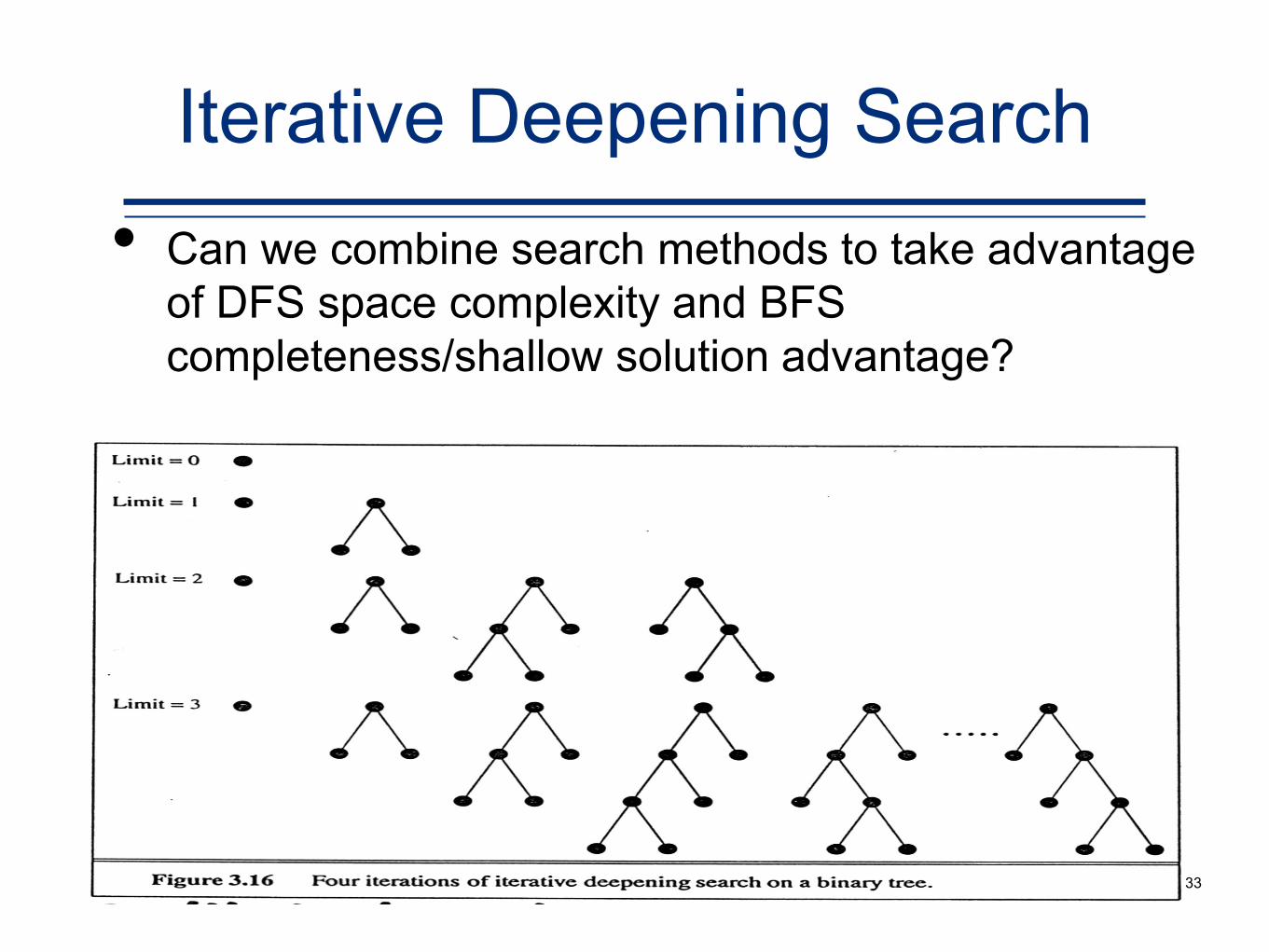
Iterative Deepening Search
• Can we combine search methods to take advantage
of DFS space complexity and BFS
completeness/shallow solution advantage?
33
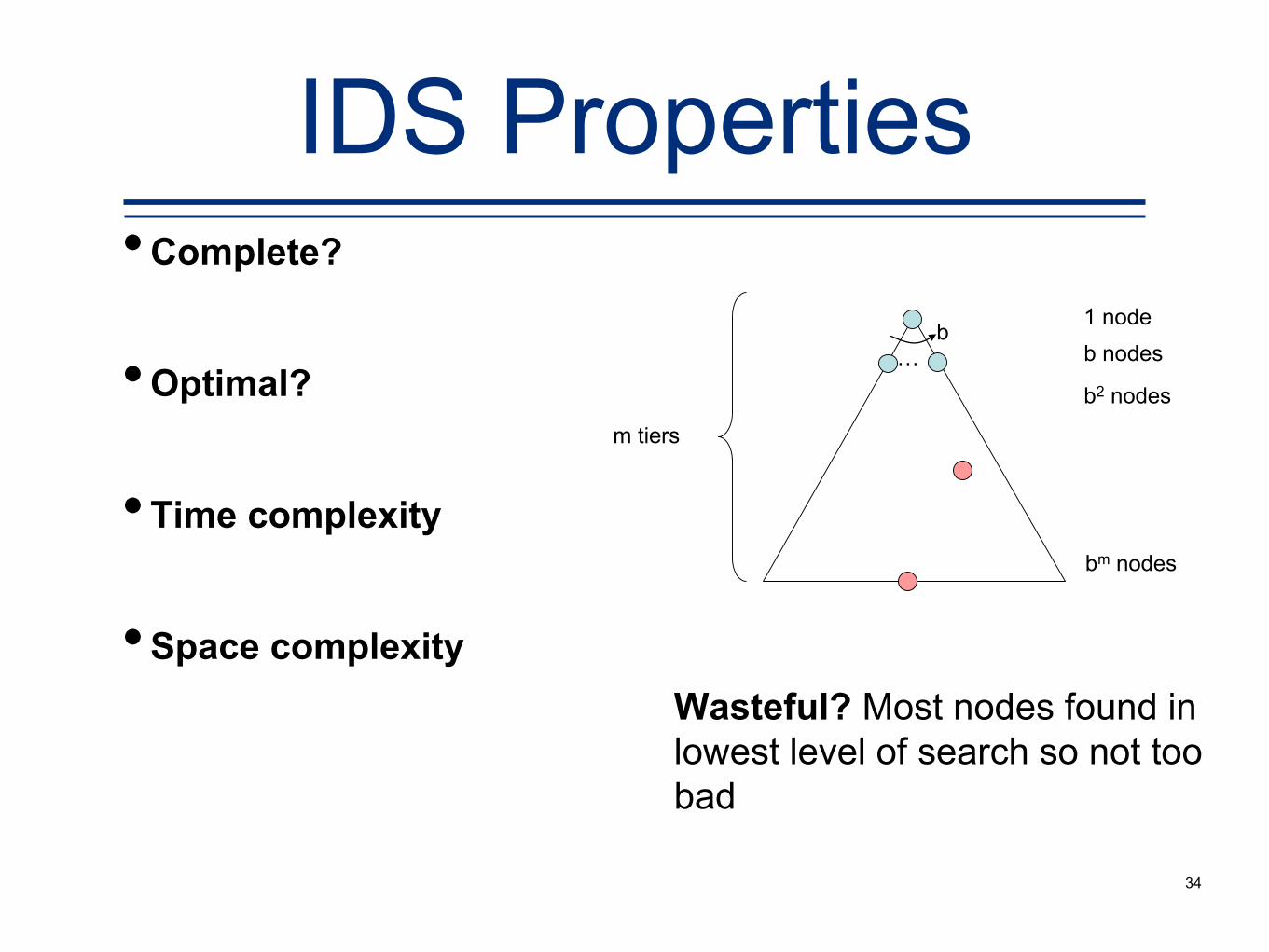
IDS Properties•Complete?
•Optimal?
•Time complexity
•Space complexity
…b
1 node
b nodes
b2 nodes
bm nodes
m tiers
Wasteful? Most nodes found in
lowest level of search so not too
bad
34
Cost-Sensitive Search
START
GOAL
d
b
pq
c
e
h
a
f
r
2
9 2
81
8
2
3
2
4
4
15
1
32
2
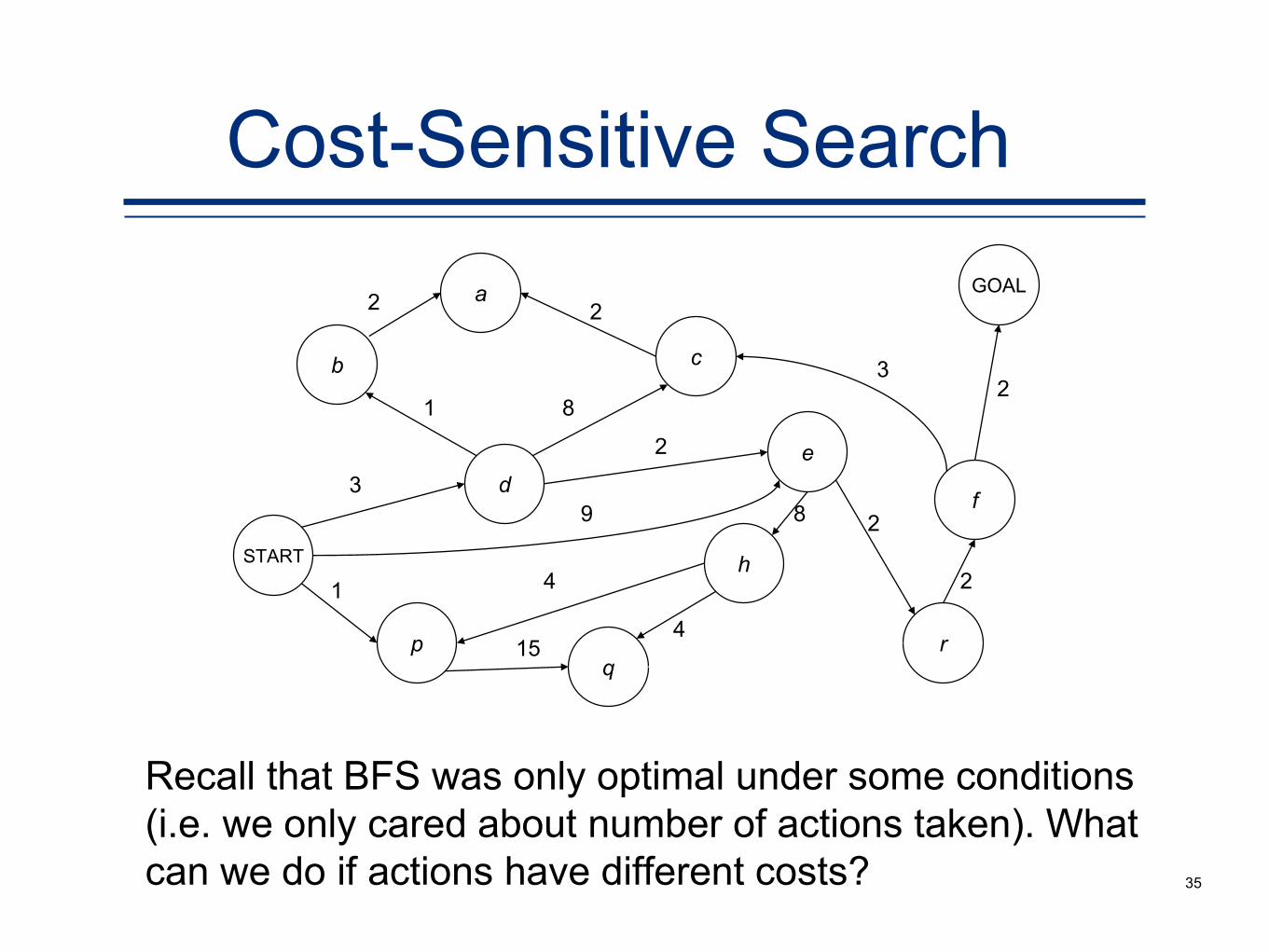
Recall that BFS was only optimal under some conditions
(i.e. we only cared about number of actions taken). What
can we do if actions have different costs? 35

Uniform Cost Search
Strategy: Expand node with lowest path cost first
Implementation: Priority queue
START
GOAL
d
b
pq
c
e
h
a
f
r
2
9 2
81
8
2
3
2
4
4
15
1
32
2
36

UCS Properties
•Complete?
•Optimal?
•Time complexity
•Space complexity
…
b
C*/𝜀 tiers
37

Summary
38
Criteria DFS BFS IDS UCS
Optimal No Yes Yes Yes
Complete No Yes Yes Yes
Time O(bm) O(bd) O(bd) O(b+1+floor(C*/ε))
Space O(bm) O(bd) O(bd) O(b+1+floor(C*/ε))
• Assumes no knowledge about the problem
- This makes them general but expensive
Figure 3.21 (Russell & Norvig)
Summary
• These algorithms are basically the
same except for the order in which they
expand nodes
• Basically all priority queues with different
ways to determining priorities
• How successful the search is depends
heavily on your model!
39

Questions?
• Next class: Informed search
“Can we make use of additional information?”
Why take a bus to London if we are going to Ottawa?
40















![Assessment of lymph node involvement in colorectal cancer€¦ · to searching for lymph nodes. de Burlet et al[20] studied LNH in gastrointestinal tumour resection specimens. Twenty](https://static.fdocuments.in/doc/165x107/5e9dab4ee24dbc500363b882/assessment-of-lymph-node-involvement-in-colorectal-cancer-to-searching-for-lymph.jpg)


