Solve State Eq Ns
11
1 Solution of State Equations M. S. Fadali Professor EE University of Nevada, Reno 2 Outline • Time domain sol uti on for zero- input response. • Proper ties of mat rix exponentia l. • Compl ete soluti on us ing integrating fa ctor. • Laplace transf orm solut ion of stat e equations. • Tr ansfer function. LTI Systems State-space model • Solve differential equation. • Homogeneous equation: time domain series solution + integrating factor for the complete solution. • Laplace transform solution. 3 4 Time Domain Approach • Zero- input (homogeneous) state equat ion • Dif fer ent iat e and substi tut e
-
Upload
imran-shah -
Category
Documents
-
view
217 -
download
0
description
Solve State Eq Ns
Transcript of Solve State Eq Ns
-
1Solution of State Equations
M. S. FadaliProfessor EE
University of Nevada, Reno
2
Outline Time domain solution for zero-input
response. Properties of matrix exponential. Complete solution using integrating factor. Laplace transform solution of state
equations. Transfer function.
LTI SystemsState-space model
Solve differential equation. Homogeneous equation: time domain series
solution + integrating factor for the complete solution.
Laplace transform solution.
3 4
Time Domain Approach Zero-input (homogeneous) state equation
Differentiate and substitute
-
Taylor Series (t = 0)
5
Example: Diagonal State Matrix
6
Numerical Example
Determine the matrix exponential for the matrix
Solution
7 8
Properties of e At Identity at
Proof !
Product Proof
0
2
-
9Properties of (Cont.) Inverse for any is
Proof:
Transpose
Proof:
Derivative of
Proof
10
Commutative Multiplication
11
Proof: Assume then
12
-
Proof:
Subtract from both sides
13 14
Complete Solution Multiply by an integrating factor
Integrate both sides from to then
Output Response
Zero-state (output) response (zero ICs)
15
Impulse Response
Response due to
Impulse response matrix cols of (resp.)
16
-
Laplace Transform State equation
Use Laplace transform of derivative_
_
17 18
Solve for X(s)
Resolvent Matrix:
We need to inverse Laplace transform the resolvent matrix to obtain the solution.
19
Matrix Exponential(state-transition matrix)
1
1
1 1
1
1
_
By analogy with scalar exponential
_
20
Complete Solution Inverse Laplace transform (use convolution)
Solution for non-zero initial time
Substitute in the output equation
-
Example: Matrix Exponential
is in companion form
21
Partial Fractions
Partial Fractions
22
Partial Fractions: Matrix Coeffts.
Inverse Laplace transform
23 24
Example: Zero-input Response
-
Example: Zero-state Response
25
Exercise
Find the matrix exponential and the response to
You can show that: 1, 4 2 18 4 24 2 1
,
3, 4 3 212 9 68 6 4
, 5, 1 1 14 4 44 4 4
26
27
Linearity Zero-input linearity
Zero-state linearity
Additivity 28
Transfer Function Use formula if given only.
Transform of solution with zero initial conditions
-
Example: Transfer Function
29
0 18 6 01
1 1 Can obtain transfer function by inspection (special case)
1 12 0.54 1 2
1 0.54 2 4
01
0.5 2 1.5 4
1 6 8
30
Example: Zero-state Response Obtain output from transfer function
MATLAB>> A=[0,1;-8,-6];B=[0;1];C=[1,1];>> poly(A) % characteristic polynomialans =
1 6 8>> p = ss(A, B, C, 0); >> g= tf(p) % can also use g=zpk(p)s + 1
-------------s^2 + 6 s + 8
31
Resolvent Matrix>> n=size(A);
>> resolvent=tf(ss(A, eye(n), eye(n), 0))
Justification:
For
32
-
MATLAB Simulation
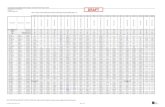
>> p = ss(A, B, C, 0); step(p) % (output) step response>> step(ss(A,B,eye(n),0)) %Make C=eye(n) to plot x
33
0
0.05
0.1
T
o
:
O
u
t
(
1
)
0 0.5 1 1.5 2 2.5 3 3.50
0.05
0.1
T
o
:
O
u
t
(
2
)
Step Response
Time (seconds)
A
m
p
l
i
t
u
d
e
Impulse Response Matrix_ _
Example:
34
35
Modes
d ii
i
d i
n
iid
n
j
tj
ji
i
n
i
ti
At
n
iid
n
jijj
i
i
n
ii
in
nnej
tZ
eZe
nnZs
Zs
AIs
1
1
01
1
1 1
11
tymultiplicidistinct,!
distinct
tymultiplicidistinct,1
distinct1
System Modes: or (some books )
Example Repeated eigenvalue
36
-
37
Modal Vectors Eigenvectors of :
is an eigenvector of with eigenvalues
State stays on eigenvector is it is the initial state.38
Example: Modal Vectors
Similarly, for the second modal vector as the response involves the second mode only.
39
Complex Conjugate EigenpairsFor a real matrix , if is an eigenpair, then is an eigenpair.
denotes the complex conjugate
eigenpair:
Complex conjugate:
40
MATLAB Example>> a=[0 1;-10,-2]a =
0 1-10 -2
>> [v,d]=eig(a)v =
-0.0953 - 0.2860i -0.0953 + 0.2860i0.9535 0.9535
d =
-1.0000 + 3.0000i 0 0 -1.0000 - 3.0000i
-
41
Complex Modal Vectors
If is in plane then so is
42
References1. P. Belanger, Control Engineering, Saunders, Fort
Worth, 1995.2. N. S. Nise, Control Systems Engineering, Wiley,
Hoboken, NJ, 2011.3. R. L. Williams & D. A. Lawrence, Linear State-
Space Control Systems, J. Wiley, Hoboken, NJ, 2011.