Solar field control for desalination plants
15
Solar field control for desalination plants Lidia Roca a, * , Manuel Berenguel b , Luis Yebra c , Diego C. Alarco ´ n-Padilla c a Convenio Universidad de Almerı ´a, Plataforma Solar de Almerı ´a, Ctra. Sene ´s s/n, 04200 Tabernas, Almerı ´a, Spain b Universidad de Almerı ´a, Dpto. Lenguajes y Computacio ´ n, Ctra. Sacramento s/n, 04120 Almerı ´a, Spain c CIEMAT, Plataforma Solar de Almerı ´a, Ctra. Sene ´s s/n, 04200 Tabernas, Almerı ´a, Spain Received 8 March 2007; received in revised form 23 October 2007; accepted 7 March 2008 Available online 7 April 2008 Communicated by: Associate Editor G.N. Tiwari Abstract This paper presents the development and application of a feedback linearization control strategy for a solar collector field supplying process heat to a multi-effect seawater distillation plant. Since one objective is to use as much as possible the solar resource, control tech- niques can be used to produce the maximum heat process in the solar field. The main purpose of the controller presented in this paper is to manipulate the water flow rate to maintain an outlet–inlet temperature gradient in the collectors, thereby ensuring continuous process heating, or in other words, continuous production of fresh water in spite of disturbances. The dynamic behaviour of this solar field was approximated by a simplified lumped-parameters nonlinear model based on differential equations, validated with real data and used in the feedback linearization control design. Experimental results in the seawater desalination plant at the Plataforma Solar de Almerı ´a (Spain) show good agreement of the model and real data despite the approximations included. Moreover, by using feedback linearization control it is possible to track a constant gradient temperature reference in the solar field with good results. Ó 2008 Elsevier Ltd. All rights reserved. Keywords: Feedback linearization; Solar distillation; Nonlinear control 1. Introduction Shortage of fresh water is a major problem affecting many countries. One way to obtain an additional source of drinking water in places where there are plentiful seawa- ter resources is with seawater desalination plants. Solar desalination has been studied for many years as a means of minimizing their ecological impact (Millow and Zarza, 1996). The use of solar energy in desalination processes is possible using multi-stage flash (MSF) and multi-effect dis- tillation (MED) coupled to a solar thermal system, in what is known as indirect solar distillation (Garcı ´a-Rodrı ´guez and Go ´ mez-Camacho, 2001). Today’s distillation market is based mainly on two tech- nologies, reverse osmosis and multi-stage flash distillation. For this reason, and to compete commercially, progress in multi-effect distillation plants could be based on reduction in fossil energy dependence by combining solar and fossil energies. The AQUASOL project at the Plataforma Solar de Almerı ´a (South-East Spain) aims to make maximum use of solar energy in a combined solar and fossil energy, multi-effect distillation plant with fourteen effects for con- tinuous production of fresh water(Alarco ´n, 2006). Ade- quate control techniques can optimize plant operation to further decrease the consumption of fossil energy. In order to fulfill the requirements for optimal operation of MED distillation plants, a specific water temperature range must be reached and maintained in the heat exchanger of the first-effect of the MED plant. Higher temperatures could produce scale formation in the heat exchanger, but lower temperatures reduce the distillate production. This paper deals with feedback linearization control in the solar field that supplies process heat to the AQUASOL 0038-092X/$ - see front matter Ó 2008 Elsevier Ltd. All rights reserved. doi:10.1016/j.solener.2008.03.002 * Corresponding author. E-mail address: [email protected] (L. Roca). www.elsevier.com/locate/solener Available online at www.sciencedirect.com Solar Energy 82 (2008) 772–786
-
Upload
lidia-roca -
Category
Documents
-
view
214 -
download
2
Transcript of Solar field control for desalination plants

Available online at www.sciencedirect.com
www.elsevier.com/locate/solener
Solar Energy 82 (2008) 772–786
Solar field control for desalination plants
Lidia Roca a,*, Manuel Berenguel b, Luis Yebra c, Diego C. Alarcon-Padilla c
a Convenio Universidad de Almerıa, Plataforma Solar de Almerıa, Ctra. Senes s/n, 04200 Tabernas, Almerıa, Spainb Universidad de Almerıa, Dpto. Lenguajes y Computacion, Ctra. Sacramento s/n, 04120 Almerıa, Spain
c CIEMAT, Plataforma Solar de Almerıa, Ctra. Senes s/n, 04200 Tabernas, Almerıa, Spain
Received 8 March 2007; received in revised form 23 October 2007; accepted 7 March 2008Available online 7 April 2008
Communicated by: Associate Editor G.N. Tiwari
Abstract
This paper presents the development and application of a feedback linearization control strategy for a solar collector field supplyingprocess heat to a multi-effect seawater distillation plant. Since one objective is to use as much as possible the solar resource, control tech-niques can be used to produce the maximum heat process in the solar field. The main purpose of the controller presented in this paper isto manipulate the water flow rate to maintain an outlet–inlet temperature gradient in the collectors, thereby ensuring continuous processheating, or in other words, continuous production of fresh water in spite of disturbances. The dynamic behaviour of this solar field wasapproximated by a simplified lumped-parameters nonlinear model based on differential equations, validated with real data and used inthe feedback linearization control design. Experimental results in the seawater desalination plant at the Plataforma Solar de Almerıa(Spain) show good agreement of the model and real data despite the approximations included. Moreover, by using feedback linearizationcontrol it is possible to track a constant gradient temperature reference in the solar field with good results.� 2008 Elsevier Ltd. All rights reserved.
Keywords: Feedback linearization; Solar distillation; Nonlinear control
1. Introduction
Shortage of fresh water is a major problem affectingmany countries. One way to obtain an additional sourceof drinking water in places where there are plentiful seawa-ter resources is with seawater desalination plants. Solardesalination has been studied for many years as a meansof minimizing their ecological impact (Millow and Zarza,1996). The use of solar energy in desalination processes ispossible using multi-stage flash (MSF) and multi-effect dis-tillation (MED) coupled to a solar thermal system, in whatis known as indirect solar distillation (Garcıa-Rodrıguezand Gomez-Camacho, 2001).
Today’s distillation market is based mainly on two tech-nologies, reverse osmosis and multi-stage flash distillation.
0038-092X/$ - see front matter � 2008 Elsevier Ltd. All rights reserved.
doi:10.1016/j.solener.2008.03.002
* Corresponding author.E-mail address: [email protected] (L. Roca).
For this reason, and to compete commercially, progress inmulti-effect distillation plants could be based on reductionin fossil energy dependence by combining solar and fossilenergies. The AQUASOL project at the Plataforma Solarde Almerıa (South-East Spain) aims to make maximumuse of solar energy in a combined solar and fossil energy,multi-effect distillation plant with fourteen effects for con-tinuous production of fresh water(Alarcon, 2006). Ade-quate control techniques can optimize plant operation tofurther decrease the consumption of fossil energy. In orderto fulfill the requirements for optimal operation of MEDdistillation plants, a specific water temperature range mustbe reached and maintained in the heat exchanger of thefirst-effect of the MED plant. Higher temperatures couldproduce scale formation in the heat exchanger, but lowertemperatures reduce the distillate production.
This paper deals with feedback linearization control inthe solar field that supplies process heat to the AQUASOL

Nomenclature
d tin inlet water transport delay (s)d to outlet water transport delay (s)_mF solar field mass flow (kg/s)I global irradiation (W/m2)T 0 nine-collector group outlet temperature (�C)T a ambient temperature (�C)T in solar field inlet temperature (�C)T o solar field outlet temperature (�C)
AcronymsCPC compound parabolic concentratorDEAHP double-effect absorption heat pump
FLC feedback linearization controlHTF heat transfer mediumMED multi-effect distillationMSF multi-stage flashPDE partial differential equationPID proportional–integral-derivative controllerPSA Plataforma Solar de Almerıa (Spain)
L. Roca et al. / Solar Energy 82 (2008) 772–786 773
project MED distillation plant at a desired first-effect inletwater temperature. The control also avoids wide tempera-ture differences in the solar field that could produce stressin the collector materials, while accounting for distur-bances and constraints affecting system performance. Thesolar field control system must therefore maintain thedesired outlet temperature despite disturbances in irradia-tion, inlet temperature and ambient temperature, usingthe inlet water flow rate as the manipulated variable.
Feedback linearization control (FLC) technique hasbeen applied in other solar fields with promising results.This method has traditionally been used as an alternativeto linear control for nonlinear plants, although there arefew applications for distributed systems. Feedback lineari-zation may be described as an approach to nonlinear con-trol design in which a nonlinear system is transformed intoa linear one, so any linear control design can be imple-mented to fit the desired control target.
This kind of techniques has been successfully applied inthe ACUREX parabolic-trough distributed solar collectorfield at the Plataforma Solar de Almerıa. Barao et al.(2002), propose a FLC scheme including a Lyapunov-based adaptation using a simplified plant model of a solarparabolic-trough distributed collector field. A nonlineartransformation of the accessible variables deals with plantnonlinearities and external disturbances, such that thetransformed system behaves as an integrator, to which lin-ear control techniques are then applied. Silva et al. (2002),use a partial physical differential equation (PDE) plantmodel for nonlinear control. Two situations are consid-ered. In the first, constant space discretization is imposed,causing the sampling period to vary with flow rate. In thesecond, constant space and time sampling makes tempera-ture a function of flow rate and solar radiation. Lineariza-tion of this function by an appropriate variabletransformation suggests the use of FLC techniques. Thefirst situation is employed in Silva et al. (2003), where thekey observation is that the oil flow rate establishes a ‘‘nat-ural” time-scale system. This is achieved in discrete time byindexing the sampling rate to the flow. Consequently, the
model equations become linear and it is possible to achievegood performance with wide-amplitude step responses. Inthe approach followed by Igreja et al. (2003), the PDEdescribing the field is approximated by a bilinear modeland an adaptive controller was designed by using exact lin-earization along with Lyapunov feedback. The results wereextended in Igreja et al. (2005) using a higher order descrip-tion of the system found by PDE discretisation using theOrthogonal Collocation Method in an adaptive receding-horizon control strategy.
The works cited above applied to parabolic-trough solarcollector fields with oil as the heat transfer medium arebased on PDE descriptions. The work of Cirre et al.(2005), which is the main basis for this paper, also uses aPDE description which is transformed into a lumped-parameters model of the system to which FLC is appliedand then an I-PD controller is applied to the resulting lin-ear system, including a modification of the algorithm toimprove start-up and inlet oil disturbance rejection,thereby achieving both feedback and feedforward controlactions, through the embedded output feedback, which isused both for linearization and feedforward. Althoughthe model used for nonlinear mapping in the FLC schemeimproves existing models by accounting for the varyingdelays between the inlet temperature, fluid flow and outlettemperature, it is still a strong simplification of the systemdynamics. However, it maintains the bilinear structure insuch a way that the use of feedback linearization enablescontroller design to be based on linear theory, which is use-ful for almost the whole range of operating conditions.This work employs the same ideas, but models a differentkind of collector field using a bilinear description (insteadof higher-order models from PDE discretization represent-ing the system dynamics) so that feedback linearization canbe applied, while simplifying several parameters in order toreduce the computational complexity. In this case, the per-formance of the approach is excellent, due to the character-istics and layout of the compound parabolic concentrators(CPC) solar collector field, which enables the modules to bemodeled so that the transport delay associated to each

774 L. Roca et al. / Solar Energy 82 (2008) 772–786
module is not dominant compared to the dominant timeconstants. This helps decrease modeling errors associatedwith the numerical approximation of the transport delay.A supervisory mechanism has to be incorporated to avoidreaching conditions under which the feedback linearizationcannot be applied, that is, when the outlet temperature islower than in the inlet. The system resulting from applyingfeedback linearization is controlled by means of a PI con-troller, including anti-reset windup that can be imple-mented simply by mapping the physical constraints tovirtual control variable limits, which are variable over timebecause they are dependent on operating conditions.
The main differences between the above-mentioned pub-lications (Cirre et al., 2005; Barao et al., 2002; Igreja et al.,2005) and the one described in this paper are:
� The type and size of the solar collecting system and theheat transfer medium (HTF): parabolic troughs with asun tracking mechanism and synthetic oil were the sub-ject of earlier work, while stationary CPCs with water asthe HTF, which have different dynamics, are studiedhere, helping to improve previous results.� The heat storage elements and setpoint profile: a high-
capacity thermocline tank is used in the ACUREX fieldapplications, so stratification causes the solar field inletoil temperature to vary very little during daily operation;on the other hand, the storage system configuration in theAQUASOL field, as shown below, produces a continuousincrement in inlet temperature when the distillation unit isoff. For this reason, this control target differs from theone applied in the ACUREX field, as the aim is to reachan outlet–inlet temperature gradient. This requirementinvolves ramp-reference tracking, rather than constantor step-type references, to maximize solar field efficiencyby setting this inlet–outlet gradient temperature.
The AQUASOL plant is briefly described in the follow-ing section of this paper. Section 3 presents the develop-ment of the solar field model, which is an essential partof the control system, including some simulation results.Section 4 describes the feedback linearization control tech-nique and the results of simulation and testing in the
Fig. 1. Diagram of the
AQUASOL field are explained in Section 5. Finally, someconclusions are drawn in Section 6.
2. System description
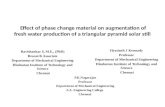
The AQUASOL system at the Plataforma Solar deAlmerıa (southern Spain), basically consists of a CPC solarcollector field, two 12 m3 water storage tanks, a multi-effectdistillation plant (MED) with a 3 m3/h nominal distillateproduction, and a double-effect (LiBr-H 2O) absorptionheat pump (DEAHP), as shown in Fig. 1. The MED plantconsists of 14 effects vertically arranged in decreasing pres-sures from cell 1 to 14. Seawater is pumped and preheatedto the first cell where it goes down to the following cells bygravity at the same time that part of the water is evapo-rated. For optimal operation, the feed-water temperaturemust be 66.5 �C in the first cell. It is possible to reach thistemperature with heat from the solar field and also bysteam generated by an auxiliary gas boiler coupled to theheat pump so the DEAHP can work at variable loads ofsteam (from 30% to 100%). Energy supplied by the solarfield and DEAHP is transferred into a thermal storage tankusing water as the heat transfer fluid. To reduce the overallfossil waste energy, the low-pressure steam from the lastcell in the MED is used in the DEAHP, which decreasesconsumption from 200 to 90 kW (Zarza, 1995). A three-way regulating valve (V2) is used to reach the nominalfirst-effect inlet temperature by mixing water from the pri-mary tank with the return from the first-effect. The AQUA-SOL plant can operate in three different modes, solar, fossiland hybrid. In the solar mode, water from the secondarytank is pumped through the solar field where it is heatedto more than 66.5 �C when feeding the primary tank. V1is an on–off valve used to recirculate water in the solar field,through the secondary tank, until nominal temperature isreached. By using the recirculation mode, cooling thatmay occur in the primary tank under some boundary con-ditions can be avoided. In solar mode, MED inlet temper-ature is reached using solar energy only. In fossil mode, theMED plant operates with the gas boiler coupled to theDEAHP working at full load, making it possible to obtainfresh water on cloudy days and during the night. Finally,
AQUASOL plant.

L. Roca et al. / Solar Energy 82 (2008) 772–786 775
the two previous modes may be combined in hybrid mode.In this case the DEAHP works at part load support, andfossil consumption is reduced as much as possible. Noticethat the most important disturbance in the system is thecontinuous variation in irradiation because of the dailycycle and unpredictable cloud transients. Global irradia-tion is measured in the AQUASOL plant using a pyranom-eter tilted at a 36� angle, which is the inclination of thesolar collectors.
3. Solar field model
The solar collector field is composed of 252 CPCs(AoSol 1.12X) with a total surface area of approximately500 m2, divided into four rows of 63 collectors (seeFig. 2). Each row is composed of groups of three collectorsconnected in parallel, and each group of three is linked toanother in series. Finally, each group of nine collectors isconnected in parallel to the row header pipe. CPC-s arenon-tracking collectors with a reflective surface aroundthe cylindrical absorber tubes that concentrates globalradiation (Duffie, 1991). The AQUASOL CPC-s are com-
Fig. 2. Solar fie
posed of seven absorber tubes each. The collectors are ori-ented east-west to maximize energy collection.
To model the solar field, hydraulic equilibrium must beconsidered. This means collectors are arranged in reversefeeding mode so flow is divided equally in each group ofnine CPC-s and, therefore, outlet temperature of the solarfield is the same as the outlet temperature in each group ofnine collectors. But it is also possible to model this group ofnine collectors as an equivalent Leq-long tube collector, anda corresponding equivalent inlet mass flow _meq which is aportion of the real solar field inlet mass flow. Solar collec-tor system dynamics can be described using nonlinear dis-tributed parameter PDE models (Camacho et al., 1997),which, when spatially discretized, lead to a system of differ-ential equations or, in the simplest case, to an approxi-mated lumped-parameters description such as
q � Cp � A �oT 0ðtÞ
ot¼ b � IðtÞ � H
Leq
� ð�T ðtÞ � T aðtÞÞ
� Cp � _meqðtÞ �T 0ðtÞ � T inðt � d tinÞ
Leq
ð1Þ
�T ðtÞ ¼ T 0ðtÞ þ T inðt � d tinÞ2
ð2Þ
ld diagram.

Table 1Solar field model variables and parameters
Parameter Value Unit
Water density at 65 �C, q 975 kg m�3
Specific thermal capacity at 65 �C, cp 4.19e3 J kg�1 �C�1
Absorber cross-section area, A 7.85e-5 m2
Optical efficiency, g 0.7 –Collector concentration, C 1.12 –Irradiation model parameter, b 0.105 mThermal losses coefficient, H 4.7 J s�1 K�1
CPC tube length, L 1.89 mEquivalent tube length, Leq 5.67 mEquivalent tube flow, _meq _mF=588 kg/s
1 T s ¼ 1 is the sample time used in the AQUASOL data acquisitionsystem.
2 Lengths l1 and l2 depend on the group of nine collectors selected.
776 L. Roca et al. / Solar Energy 82 (2008) 772–786
Outlet solar field temperature, T 0, varies depending onglobal irradiation disturbances I, ambient temperatureT a, inlet solar field temperature T in, and on the manipu-lated variable mass flow _mF (or equivalently in _meq), asshown in Eq. (1), where the parameters are as shown inTable 1. Although the heat losses coefficient could be rep-resented by a second degree polynomial approximationwith the difference between absorber and ambient temper-atures, ðT ab � T aÞ, as the independent variable, as Frain-denraich et al. (1999) pointed out, such an accuratesolution is not necessary for control purposes. For this rea-son, we assume a constant heat losses coefficient, H, foundexperimentally by parameter identification techniquesunder different operating conditions. Furthermore, absor-ber temperature is modeled as the mean temperature, �T ,between outlet and inlet water temperature (see Eq. (2)).Another simplification is the use of temperature-indepen-dent water properties. Specifically, and due to the operat-ing temperature range, model fluid properties arecalculated at 65 �C. On the other hand, incident solarpower on the collector is represented by means of a globalparameter b that not only includes the aperture and effi-ciency of the collectors, but also an attenuating factordue to the fact that irradiation collected by the collectoris not global irradiation, but beam radiation plus a fractionof diffuse that depends on the collector concentration C
(Carvalho et al., 1995). As commented in the sectionresults, this parameter can also be used in the model tomodulate the effect of solar radiation. Variables I, T a, T in
and _mF are measured by sensors in the solar field. Noticethat there is a transport delay of d tin between the solar fieldinlet temperature sensor and the inlet of a group of ninecollectors (see Fig. 2), that varies depending on the flowrate, vðtÞ. This kind of delay implies that a variation insolar field disturbance at the inlet at sample time t willnot directly affect the output at that sample time, but atsample time t þ d tin. Under steady-state conditions, thisdelay in the pipe has a constant value that can be computedas d tin � l1=v using the distance, l1, that the fluid has tocover to reach the inlet of the CPC tube. However, this sta-tionary approximation of the input–output temperaturedelay could be used for control if the volumetric flow ratedoes not change very much on the corresponding timescale. If a wide range of operating conditions has to be cov-
ered, the variable time delay can be estimated by numericalintegration using the method proposed by Normey-Ricoet al. (1998). As the flow rates change at each samplingtime, the system transport delay can be estimated as aninteger multiple n of the sampling time. At each discrete-time instant t, the new required flow f ðtÞ is calculated bythe controller. The distance dlk that can be covered bythe fluid between sample times T s
1 with a correspondingflow rate f ðkÞ is given by dlk ¼ T sf ðkÞ=S, S being the areaof the pipe cross-section. Using a discrete-time approxima-tion of the equation which accounts for the flow rates dur-ing different sampling intervals, the value of n can becomputed for each sample as follows
l1 ¼Z tr
0
vðtÞdt! T s
S
Xi¼n�1
i¼0
f ðt � iÞ ¼ l ð3Þ
where tr is the fluid residence time in the pipe and f ðt � iÞ isfound from previous measurements, (f ðtÞ is the currentflow rate, f ðt � 1Þ was the flow demanded at the previoussampling time and consequently, f ðt � nþ 1Þ was the flowdemanded n at previous sampling times, so that nT s � tr).Process dead-time can thus be estimated, because the digi-tal implementation of Eq. 3 is quite simple, and when thesum of the partial flows completes the known parameterl1, index n is obtained which corresponds to the transportdelay in sample times. This approximation is very usefulfor finding input–output temperature transport delayapproximation d tin and modelling one of the causes pro-ducing input flow-output temperature delay, due to theplacement of the sensors.
Another delay in the of nine-collector group outlet tem-perature (T 0) must be considered to find the solar field out-let temperature (T o), which depends on the inlet mass flowthe same way as the inlet solar field temperature, but takinginto account the length of pipe, l2, nine-collectors groupoutlet2 and the position of the outlet temperature sensor
T oðtÞ � T 0ðt � d toÞ ð4Þ
3.1. Model validation
To test the validity of the model, outlet temperatureresults were compared with AQUASOL plant data notused to calibrate the thermal losses coefficient. Two exper-imental days are shown. The first is a day without irradia-tion disturbances but with varying inlet temperature andwater flow, and the other has strong variations in irradia-tion showing how the model also takes this disturbanceinto account.
Fig. 3 shows how the main disturbances developbetween approximately 10 and 16 h. Steps between2 � 10�3 m3/s and 5 � 10�3 m3/s in solar field inlet flow rateare shown. Ambient temperature varies between 11 �C and

10 11 12 13 14 15 16600
800
1000
1200
I (W
/m2 )
10 11 12 13 14 15 1640
60
80
100
Tin
(ºC
)
10 11 12 13 14 15 1610
12
14
16
Ta (º
C)
10 11 12 13 14 15 160
2
4
6
Local Time (h)
Wat
er fl
ow·1
0—3
(m3 /s
)
Fig. 3. Experimental disturbances, March 6, 2006.
10 11 12 13 14 15 1660
65
70
75
80
85
90
95
Local Time (h)
Sola
r fie
ld o
utle
t tem
pera
ture
(ºC
)
realsimulated
Fig. 4. Simulation results using the solar field model, March 6, 2006.
L. Roca et al. / Solar Energy 82 (2008) 772–786 777
16 �C, irradiation follows the solar cycle without cloudtransients and solar field inlet temperature has a typicalpositive slope due to the temperature in storage systemuntil the MED is turned on (13.8 h). At this time, the waterresident in the pipe connections and the return from the
first-effect decreases the temperature in the storage systemfirst, and then in the inlet to the solar field. The comparisonbetween the solar field outlet temperature simulated by themodel and the real one is shown in Fig. 4 where the goodagreement between the modeled and real data may be seen,

778 L. Roca et al. / Solar Energy 82 (2008) 772–786
the widest difference being 1.8 �C at 10.5 h when there is asudden decrease of 100 W/m2 in irradiation.
Another simulation is given in Fig. 6, with disturbancesas in Fig. 5, for a day on which the feedback linearization
10 10.5 11 11.5 120
500
1000
1500
10 10.5 11 11.5 120
50
100
10 10.5 11 11.5 126
8
10
12
10 10.5 11 11.5 120
2
4
6
I (W
/m2 )
Tin
(ºC
)Ta
(ºC
)W
ater
flow
·10—
3 (m
3 /s)
Loca
Fig. 5. Experimental disturba
10 10.5 11 11.5 1210
20
30
40
50
60
70
80
Local
Sola
r fie
ld o
utle
t tem
pera
ture
(ºC
)
realsimulated
Fig. 6. Simulation results using the sol
controller presented in Section 4 was tested. This dayshows smooth variation in the inlet temperature slopedue to variation in the position of the on–off valve thatrecirculates water from the solar field through only the
12.5 13 13.5 14 14.5
12.5 13 13.5 14 14.5
12.5 13 13.5 14 14.5
12.5 13 13.5 14 14.5l time (h)
nces, December 20, 2006.
12.5 13 13.5 14 14.5Time (h)
ar field model, December 20, 2006.

Fig. 7. Solar field control diagram.
L. Roca et al. / Solar Energy 82 (2008) 772–786 779
secondary water tank. At the beginning of the day, outletsolar field temperature goes into the primary tank, butvalve V1 position is changed at 11.8 h, which then recircu-lates the water through only the primary tank. Since thisreduces the storage capacity to half, the inlet temperatureincreases much sooner. Between 12.7 h and 13.3 h, the inlettemperature does not vary because irradiation is low, butas irradiation rises, inlet temperature also starts to riseagain. This simulation not only shows the behavior ofthe model with variations in solar field inlet temperatureover a typical operating day, but it may also be observedhow the model respond to strong changes in irradiation.Specifically, there is a maximum deviation between realand simulated outlet temperature of 3.8 �C at 12.9 h.
4. Feedback linearization control
The main idea of the feedback linearization technique isto transform a nonlinear system into a linear one using a-non-linear feedback that makes up for nonlinearities in sys-tem behavior. As Slotine and Li (1991) explain, it is possi-ble to compensate for nonlinearities in systems describedby the controllability canonical form shown in Eq. (5) forthe state variable x, by using control input u and virtualsignal v, both related as defined in Eq. (6)
xðnÞ ¼ f ðxÞ þ bðxÞ � u ð5Þ
u ¼ 1
bðxÞ ðv� f ðxÞÞ; b 6¼ 0 ð6Þ
As mentioned in the introduction, the reason for usingthe feedback linearization technique here is to track adesired outlet setpoint temperature dependent on the inlettemperature using _mF as the control signal, for which, theoutlet temperature model (Eq. (1)) is transformed intothe canonical form
_T 0ðtÞ ¼ b � IðtÞq � Cp � A
� H � �T ðtÞ � T aðtÞð ÞLeq � q � Cp � A
� u
� T 0ðtÞ � T inðt � d tinÞð Þ ð7Þ
where u is defined as
u ¼ _mF
Leq � A � qð8Þ
When compared with the canonical form (see Eq. (5))the control input u needed to compensate for nonlinearitieswill be
u¼� 1
T 0ðtÞ� T inðt� d tinÞ� ðv� b � IðtÞ
q �Cp �AþH � ð�T ðtÞ� T aðtÞÞ
Leq �q �Cp �AÞ
ð9ÞThis yields, a simple input–output relationship
_T 0 ¼ v
which represents a pure integrator where the input is thevirtual signal v. Thus it is possible to use a linear control(for instance, a PI with anti-reset windup) as shown inthe diagram in Fig. 7. As it is a Type 1 system (integrator),the use of a PI controller helps to track reference tempera-tures with a kind of ramp shape, although conservativeparameter tuning is desirable, as commented in the results.In order to ensure b 6¼ 0, T 0ðtÞ � T inðt � d tinÞ ¼ 0 must beavoided, so a safety constraint must be applied when thedifference is computed to obtain control input. A satura-tion block is included to maintain the outlet–inlet temper-ature gradient over 1 �C for this reason.
To account for actuator saturation, a standard anti-resetwindup mechanism (Astrom and Hagglund, 1995; Astromand Wittenmark, 1997) with integrator windup integraltime T t has been implemented. Although saturation isapplied to the control signal, input and output saturationvalues are transformed into virtual signal saturation valuesusing the transformation of Eq. (9). Thus, the limits in thevirtual control signal at each sampling time are given by
vmin ¼ minumin6u6umax
v ð10Þ
vmax ¼ maxumin6u6umax
v ð11Þ
with
v ¼ b � IðtÞq � Cp � A
� H � ð�T ðtÞ � T aðtÞÞL � q � Cp � A
� u � ðT 0ðtÞ � T inðt � d tinÞÞ
ð12Þ
5. Representative results
The control strategy explained in Section 4 was tested intwo steps. First, the control scheme was simulated using a

780 L. Roca et al. / Solar Energy 82 (2008) 772–786
computer implementation of the model described in Sec-tion 3 for a first estimation of the controller parameters.Secondly, the same diagram was transferred to the realplant. As mentioned, a PI is used as the linear controllerin the feedback linearization diagram, including a safetyconstraint in the outlet–inlet temperature gradient in orderto avoid null values. Also notice that if outlet temperaturefalls below inlet temperature because of changes in irradia-tion, the control diagram provides negative water flow val-ues. A saturation block is included in both simulation andreal plant operation to maintain the outlet–inlet differenceupon 1 �C for this reason. As the disturbances are used bythe feedback linearization mechanism, their sampled valuesare filtered by a low-pass filter before being used for con-trol, to avoid sudden changes and large control efforts inthe control signal.
5.1. Simulation results
Feedback linearization control was simulated using themodel explained in Section 3 to obtain the outlet tempera-ture from _mF. Therefore, in this case, the solar field block inthe control diagram (see Fig. 7) is the model.
Since the main purpose of the control system in the realplant is to maintain a difference between outlet and inlettemperature of between 5 �C and 20 �C to avoid stress inCPC materials, the simulation setpoint was set at T inþDT . But, because of the solar field pump characteristics,maximum inlet flow is limited to 4.7 � 10�3 m3/s, and flowrates under 1 � 10�3 m3/s are not used to ensure hydraulicequilibrium, so the pump actuator is saturated.
9 10 11 120
500
1000
1500
10 11 120
50
100
9 10 11 1210
15
20
25
I (W
/m2 )
Tin
(ºC
)Ta
(ºC
)
Local Time
Fig. 8. Experimental distur
Fig. 8 shows the real plant inputs on March 7, 2006.Solar radiation during the daily cycle varies slightly atthe beginning of operation, but more strongly toward theend. Inlet temperature also drops suddenly at 12 h andambient temperature is in the range between 12 �C and21 �C. Using the proportional and integral parameters inPI (Astrom and Hagglund, 1995), kp ¼ 0:008 s�1 andT i ¼ 500 s, respectively, and T t ¼ 35 s for the anti-resetwindup constant, solar field outlet temperature tracks thereference as shown in Fig. 9. With the initial control config-uration, where the parameter b modulating irradianceremains unchanged (or what is the same, is multiplied bya factor of a ¼ 1), the outlet temperature is shown as grey.Notice that although the outlet temperature is tracking thereference in spite of slight variation in irradiation at thebeginning, the control signal (see Fig. 10) is aggressive.This becomes more evident when changes in irradiationare stronger at the end of the experiment, even in this case,where the solar radiation signal is filtered using a low-passfilter. As the plant model is quite sensitive to b, and afterthese preliminary tests, is multiplied by an attenuation fac-tor a, which is set to a ¼ 0:4, the results shown as the blacksolid line in Fig. 9 are produced. This approach is commonin solar plants with distributed collectors, as the parame-ters multiplying the solar irradiance in the model stronglyaffect system performance. For instance, (Barao et al.,2002), include a parameter multiplying the irradiance in asimplified PDE model of a distributed solar parabolic-trough collector field. This parameter is then adapted toachieve the desired performance. In our case and for thesake of simplicity, a has been experimentally tuned and
13 14 15
13 14 15
13 14 15 (h)
bances, March 7, 2006.

Fig. 9. Simulation results with FLC, March 7, 2006. Outlet solar field temperature.
9 10 11 12 13 14 15 161
1.5
2
2.5
3
3.5
4
4.5
5x 10—3
Local Time (h)
Wat
er fl
ow (m
3 /s)
a=0.4a=1
Fig. 10. Simulation results with FLC, March 7, 2006. Inlet water flow.
L. Roca et al. / Solar Energy 82 (2008) 772–786 781
set to at the above-mentioned value, although it could beused as an additional degree of freedom for (adaptive) con-trol purposes. Regarding the results, it may be observedthat in this case slight variation in irradiance producessmoother variation in water flow, with a maximum refer-ence tracking error of 1 �C. Furthermore, strong variation
in the control signal at the end of the simulation is alsoavoided. As the inlet temperature drops, the reference doesalso (11.5 �C).
At this point, although the inlet flow rate reacts instantly(because feedforward action is embedded in the controlscheme) the system response does not begins to lower the

782 L. Roca et al. / Solar Energy 82 (2008) 772–786
water temperature until after 78 s because of the delay d to
due to the location of the outlet temperature sensor usedfor control, as there is a long section of passive (unillumi-nated) pipe between collector outlet and the sensor. Fromthis sample time, although the virtual signal goes downto maintain the temperature difference (see Fig. 11), theoutlet temperature cannot track the reference adequatelybecause the pump is at maximum power (see Fig. 10),and even so, the maximum tracking error measured is stillonly 1 �C. Wide variation in irradiation produces pumpsaturation at 1 l/s, but the anti-reset windup strategy keepsthe system from entering undesirable oscillation. Noticethat when the water flow is constant, the outlet temperaturetracks the reference as a result of setpoint dependence oninlet temperature. As the PI is controlling an integrator sys-tem, the virtual signal is approximately zero when the ref-erence is reached when a ¼ 1, as expected (see Fig. 11). Onthe other hand, with different a, modeling errors displacedthe virtual signal from zero (notice that in this case themodel with a ¼ 1 is being used as the real plant).
It is interesting to point out that inlet–outlet tempera-ture transport delays are efficiently handled by the pro-posed control scheme, through the approximation givenby Eq. (3). The variable input flow rate-outlet temperaturetransport delay measured (between 30 and 143 s) is due tothe position of the outlet temperature sensor, however, andthe main objective is to control the outlet field temperature,not that of each collector. In fact, in experiments per-formed in a specific collector provided with both inletand outlet temperature sensors, the outlet temperature
10 11 12—0.2
—0.15
—0.1
—0.05
0
0.05
0.1
0.15
0.2
Local
Virtu
al c
ontro
l sig
nal (
º C/s
)
Fig. 11. Simulation results with FLC
reacts instantly to step changes in the water flow. Thesetime delays therefore affect controller performance. Asthe dominant time constants of the system are between100 and 190 s, a PI controller with conservative parametertuning should be used. A type of Smith Predictor control-ler, such as those in (Normey-Rico et al., 1998) may be analternative that will be analyzed in future works.
5.2. Real plant results
The feedback linearization strategy explained above (seeFig. 7) was implemented in the real AQUASOL solar fieldand tested on several operating days. Due to the narrowpump operating range, the weather conditions often makeit impossible to maintain desired initial temperature differ-ences. Therefore, the temperature reference has to be chan-ged manually during the experiments in order to avoidsaturating the pump for long periods.
Fig. 12 shows disturbances on December 18, 2006between 9.5 h and 14.5 h. The top plot shows irradiationon a clear day. The one in the center shows how the inlettemperature rises from 22 �C to 80 �C with an increase inslope at 12 h due to a recirculation valve change, and theone at the bottom shows variation in ambient temperaturebetween 20 �C and 30 �C. In order to obtain different tem-perature gradients, the reference is changed to T i þ DT ; at9.5 h DT ¼ 5 �C, 9.8 h DT ¼ 7 �C, 10.2 h DT ¼ 10 �C,11.2 h DT ¼ 12 �C, 12.9 h DT ¼ 15 �C, 13.5 h DT ¼ 13 �C(See Fig. 13). Maximum overshoot of 3.8 �C is observedat 10.36 h and maximum settling time is 12 min during the
13 14 15 16 Time (h)
a=0.4a=1
, March 7, 2006. Virtual signal.

9.5 10 10.5 11 11.5 12 12.5 13 13.5 14 14.5200
400
600
800
1000
Local time (hours)
9.5 10 10.5 11 11.5 12 12.5 13 13.5 14 14.520
40
60
80
9.5 10 10.5 11 11.5 12 12.5 13 13.5 14 14.55
10
15
20
I (W
/m2 )
Tin
(ºC
)Ta
(ºC
)
Local time (h)
Fig. 12. Experimental disturbances, December 18, 2006.
9.5 10 10.5 11 11.5 12 12.5 13 13.5 14 14.520
30
40
50
60
70
80
90
Local Time (h)
referencereal
Sola
r fie
ld o
utle
t tem
pera
ture
(ºC
)
Fig. 13. Experimental results with FLC, December 18, 2006. Outlet solar field temperature.
L. Roca et al. / Solar Energy 82 (2008) 772–786 783
third reference change. The controller attempts to track thereferences by progressively modifying the flow according tochanges in inlet temperature and solar radiation, and avoid
tracking errors (about 0.5 �C in the experiment), but with asome oscillation, as seen in Fig. 14. Possible sources of oscil-lation were analyzed, as these could come from controller

9.5 10 10.5 11 11.5 12 12.5 13 13.5 14 14.51.5
2
2.5
3
3.5
4
4.5
5x 10—3
Local time (h)
Wat
er fl
ow (m
3 /s)
Fig. 14. Experimental results with FLC, December 18, 2006. Inlet solar field flow.
10 10.5 11 11.5 12 12.5 13 13.5 14 14.510
20
30
40
50
60
70
80
Local time (h)
Sola
r fie
ld o
utle
t tem
pera
ture
(ºC
)
referencereal
Fig. 15. Experimental results with FLC, December 20, 2006. Outlet solar field temperature.
784 L. Roca et al. / Solar Energy 82 (2008) 772–786
tuning combined with a variable flow rate-outlet tempera-ture delay, insufficient filtering of the main disturbancesnot observed during simulation, or even from excitationof the resonance characteristics in this kind of systems if fast
responses are required (Camacho et al., 1997). In all cases, atrade-off solution can be found between performance andstability by slightly de-tuning the PI controller and narrow-ing the bandwidth of the disturbance filters used, because

10 10.5 11 11.5 12 12.5 13 13.5 14 14.51
1.5
2
2.5
3
3.5
4
4.5
5x 10—3
Local time (h)
Wat
er fl
ow (m
3 /s)
Fig. 16. Experimental results with FLC, December 20, 2006. Inlet solar field flow.
L. Roca et al. / Solar Energy 82 (2008) 772–786 785
high frequency variation in these signals is amplified by thecontroller producing oscillation.
The new results obtained after these modifications canbe seen in Figs. 15 and 16, with the disturbances previouslyshown in Fig. 5, where clouds produce strong changes inirradiation (about 700 W/m2) between 12.5 h and 13.5 hand also at the end of the experiment (15.2 h). In this case,the reference is set to T i þ 10 �C at operation startup andonce the control signal is saturated (see Fig. 16), a fieldtemperature gain of 13 �C is set, thus reaching the control-ler the setpoint with an overshot of 1 �C. Other smoothchanges in the reference, DT ¼ 10 �C at 12.1 h andDT ¼ 12 �C at 12.2 h, were produced along the day. Con-troller behavior is now observed to be quite acceptable,avoiding the above-mentioned oscillation with a maximumtracking offset of 0.5 �C at the beginning. Notice that whenatmospheric conditions make it impossible to maintain atemperature gradient, the control signal is saturated at itsminimum value. 400 W/m2 variations in irradiation forcethe in inlet solar field flow rate to vary, causing wide devi-ations from reference in outlet temperature. It is sometimestherefore impossible even for a qualified operator to reachthe reference when variations in irradiation are very fast.This can be observed at the end of the experiment, but itis very interesting to observe how the controller is able torecover from a long period of pump saturation (very lowsolar radiation) without strong oscillation (due to theanti-windup mechanism), this usually leads to plant shut-down when manually operated. Thus, the use of the pro-posed automatic control scheme not only contributes to
optimizating plant operation, but also maximization ofthe time the facility can be in operation.
6. Conclusions
A feedback linearization control system is proposed fora CPC solar field that supplies heat to a MED distillationplant. A simplified energy balance, including a numericalapproximation of input–output transport delays, which isvery useful for feedforward control purposes, was usedfor modeling. The use of feedback linearization allows clas-sical linear controllers to be designed and implemented forintegral systems, which in this case, are PI type to helptrack ramp-shaped references. Although system dynamicswere highly simplified, by considering both a lumped-parameters description of the system and constant fluidproperties and heat losses, experimental results have shownthat this kind of model provides a very good approxima-tion of real plant behavior, and more importantly, theycan be used for control. When FLC had been success-fully tested in simulation, the technique was implementedin the real plant, where the controller parameters anddisturbance filters were fine-tuned. Experiments in theAQUASOL field show good results using an inlet temper-ature-dependent reference. However, the FLC shows anaggressive response to strong irradiation disturbances.For this reason, a damping factor to attenuate irradiationdisturbances has been added.
On the other hand, as the pump has a limited operatingrange, the purpose is to use an inlet–outlet gradient temper-

786 L. Roca et al. / Solar Energy 82 (2008) 772–786
ature avoiding pump saturation. It is important to noticethat by using the reference gradient temperature properly,solar field efficiency, or in other words, the thermal powerdelivered from the solar collectors to the storage systemcan be maximized. Maximizing this power is basic to main-taining the heat to the MED plant as stable as possible, sothat the distillation production rate is ensured. Further-more, temperature drops in the solar field are smaller usingFLC, so the solar resource is used more efficiently than withfixed flow rates. Moreover, real plant experiments illustratethat this control scheme works quite well following an inlettemperature-dependent-reference. One way to improvefuture controllers is to use a modified Smith predictor struc-ture to explicitly account for variable flow rate-outlet tem-perature delays, although the time delay is not dominantcompared to the main time constants of the system.
Finally, it is important to mention that the solar fieldoutlet temperature control is the first step in the overall goalof developing a hybrid control system combining the use ofthe solar field with the double-effect absorption heat pumpto ensure constant fresh water production. Moreover, aninlet–outlet solar field temperature gradient could be usedas the reference temperature within an objective functionin order to maximize the efficiency of the solar field.
Acknowledgements
The authors would like to thank the European Commis-sion for funding the AQUASOL Project (contract No.EVK1-CT2001-00102), CICYT-FEDER for cofunding thiswork under grant DPI2004-07444-C04-04 and the Conse-jerıa de Innovacion, Ciencia y Empresa de la Junta de And-alucıa. This work was done in the scope of a specificcollaboration agreement between the PSA and the Univer-sity of Almerıa Automatic Control, Electronics and Robot-ics (TEP-197) research group entitled Development ofcontrol systems and tools for solar thermal plants.
References
Alarcon, D., 2006. Experimental results of AQUASOL project: develop-ment of an advanced hybrid solar-gas multi-effect distillation system.
In: 13th International Symposium on Concentrated Solar Power andChemical Energy Technologies, Seville, Spain, June 20–23.
Astrom, K.J., Hagglund, T., 1995. PID Controllers: Theory, Design, andTuning. Instrumen Society of America.
Astrom, K.J., Wittenmark, B., 1997. Computer-Controlled SystemsTheory and Design. Prentice Hall.
Barao, M., Lemos, J.M., Silva, R.N., 2002. Reduced complexity adaptivenonlinear control of a distributed collector solar field. Journal ofProcess Control 12, 131–141.
Camacho, E.F., Berenguel, M., Rubio, F.R., 1997. Advanced Control ofSolar Plants. Springer Verlag.
Carvalho, M.J., Collares-Pereira, M., Correia de Oliveira, J., Farihna,J.M., Haberle, A., Wittwer, V., 1995. Optical and thermal testing of anew 1.12X CPC solar collector. Solar Energy Materials and Solar Cells37, 175–190.
Cirre, C.M., Valenzuela, L., Berenguel, M., Camacho, E.F., 2005.Feedback linearization control for a distributed solar collector field.In: Proceedings of 16th IFAC World Congress, Praga, CzechRepublic.
Duffie, J.A., 1991. Solar Engineering of Thermal Process. A WileyInterscience Publication.
Fraindenraich, N., De Lima, R., De, C.F., Tiba, C., Barbosa, E.M., De,S., 1999. Simulation model of a CPC collector with temperature-dependent heat loss coefficient. Solar Energy 65, 99–110.
Garcıa-Rodrıguez, L., Gomez-Camacho, C., 2001. Perspectives of solar-assisted seawater distillation. Desalination 136, 213–218.
Igreja, J.M., Lemos, J.M., Barao, M., Silva, R.N., 2003. Adaptivenonlinear control of a distributed collector solar field. In: Proceedingsof the European Control Conference ECC03, Cambridge, UK.
Igreja, J.M., Lemos, J.M., Barao, M., Silva, R.N., 2005. Adaptivereceding horizon control of a distributed collector solar field. In:Proceedings of the 44th IEEE Conference on Decision and Control,and the European Control Conference, pp. 1282–1287.
Millow, B., Zarza, E., 1996. Advanced MED solar desalination plants.Configurations, costs, future – seven years of experience at thePlataforma Solar de Almerıa (Spain). Desalination 108, 51–58.
Normey-Rico, J.E., Bordons, C., Berenguel, M., Camacho, E.F., 1998. ARobust adaptive dead-time compensator with application to a solarcollector field. In: 1st IFAC International Workshop on Linear TimeDelay Systems, pp. 105–110.
Silva, R.N., Rato, L.M., Lemos, J.M., 2002. Observer based nonuniformsampling predictive controller for a solar plant. In: Proceedings of the15th IFAC World Congress, Barcelona, Spain.
Silva, R.N., Lemos, J.M., Rato, L.M., 2003. Variable sampling adaptivecontrol of a distributed collector solar field. IEEE Control SystemsTechnology 11 (5), 2003.
Slotine, J., Li, W., 1991. Applied Nonlinear Control. Prentice Hall.Zarza, E, 1995. Solar Thermal Desalination Project Phase II Results &
Final Project Report. Coleccion Documentos Ciemat.