Softassign and EM-ICP on GPU
34
Toru Tamaki, Miho Abe, Bisser Raytchev, Kazufumi Kaneda 19 th Nov. 2010
-
Upload
toru-tamaki -
Category
Technology
-
view
5.483 -
download
2
description
Toru Tamaki, Miho Abe, Bisser Raytchev, Kazufumi Kaneda: "Softassign and EM-ICP on GPU", Proc. of UPDAS2010; The 2nd Workshop on Ultra Performance and Dependable Acceleration Systems, In Proc. of ICNC'10, pp.179-183 (2010 11), Higashi Hiroshima, Japan, November 17-19, 2010. Toru Tamaki, Miho Abe, Bisser Raytchev, Kazufumi Kaneda, Marcos Slomp: "CUDA-based implementations of Softassign and EM-ICP," Demonstration presented at CVPR2010 ; IEEE Conference on Computer Vision and Pattern Recognition, June 15-17, 2010, Hyatt Regency San Francisco, San Francisco, USA.
Transcript of Softassign and EM-ICP on GPU

Toru Tamaki, Miho Abe, Bisser Raytchev, Kazufumi Kaneda
19th Nov. 2010

Contribution of this talk
Fast GPU implementations of registration algorithms for 3D point sets.
Softassign [Gold et al., 1998]
EM-ICP [Granger et al., 2002]
(Weighted) Horn’s method [Horn, 1987]
So, what is “registartion” ?

What is “Registration” or “Alignment” ?
A set of images
Image registration

Registration of 3D point sets 大石岳史,増田智仁,倉爪亮,池内克史,創建期奈良大仏及び大仏殿のデジタル復元,日本バーチャルリアリティ学会論文誌, Vol. 10, No. 3, pp.429-436, 2005.10.
A statue
Range data from one
view
Range data from
another view
Aligned (registered) 3d point cloud
An example of rendered CG image of the statue

3D registration algorithm
Input
Two point sets: 𝑋 and 𝑌
Output
Rotation matrix 𝑅
Translation vector 𝒕
X Y
𝑅 and 𝒕

Algorithms for registration
Horn’s method
• Corresponding point sets are given.
• Estimate R and t.
ICP (Iterative closest point)
• Unknown correspondence.
• Fast, standard.
• Easily fail due to local minimum.
• A lot of variants follow.
Softassign
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
EM-ICP
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
Registration algorithm

Algorithms for registration
Horn’s method
• Corresponding point sets are given.
• Estimate R and t.
ICP (Iterative closest point)
• Unknown correspondence.
• Fast, standard.
• Easily fail due to local minimum.
• A lot of variants follow.
Softassign
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
EM-ICP
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
Registration algorithm

Horn’s method: correspondence is known.
𝑋 𝑌
X Y
?
Unknown correspondence
X Y
Known correspondence
𝒙1 𝒚1
𝒙2 𝒚2
⋮ ⋮
𝑇
𝑇
𝑇
𝑇
𝒙1 = (𝑥1𝑥, 𝑥1𝑦, 𝑥1𝑧)𝑇

Horn’s method: correspondence is known.
𝑋 𝑌
𝒙1 𝒚1
𝒙2 𝒚2
⋮ ⋮
𝑇
𝑇
𝑇
𝑇
𝒙 𝒚
Compute centers
𝑋 𝑌
Centering
𝑋 − 𝒙 𝑌 − 𝒚
𝑋 𝑌 𝑆 =
𝐾 =
Computer 1st Eigenvector 𝒒 : quaternion 𝑞 Convert 𝑞 to 𝑅
𝒕 = 𝒙 − 𝑅𝒚 1 2
3
4
5

Algorithms for registration
Horn’s method
• Corresponding point sets are given.
• Estimate R and t.
ICP (Iterative closest point)
• Unknown correspondence.
• Fast, standard.
• Easily fail due to local minimum.
• A lot of variants follow.
Softassign
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
EM-ICP
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
Registration algorithm

ICP: correspondence is unknown.
𝑋 𝑌
𝒙1 𝒚1
𝒙2 𝒚2
⋮ ⋮
𝑇
𝑇
𝑇
𝑇
Find closest (nearest) point to 𝒙1 in 𝑌
𝑌∗
𝒚𝑖
𝒚𝑖
Put the point to 𝑌∗

ICP: correspondence is unknown.
𝑋 𝑌
𝒙1 𝒚1
𝒙2 𝒚2
⋮ ⋮
𝑇
𝑇
𝑇
𝑇
Find closest (nearest) point to 𝒙1 in 𝑌
𝑌∗
𝒚𝑗
𝒚𝑖
Put the point to 𝑌∗
𝒚𝑗
⋮
Horn’s method with 𝑋 and 𝑌∗
Estimate 𝑅 and 𝒕

ICP: correspondence is unknown.
𝑋 𝑅𝑌 + 𝒕
𝒙1 𝒚1
𝒙2 𝒚2
⋮ ⋮
𝑇
𝑇
𝑇
𝑇
Find closest (nearest) point to 𝒙1 in 𝑌
𝑌∗
𝒚𝑗
𝒚𝑖
Put the point to 𝑌∗
𝒚𝑗
⋮
Horn’s method with 𝑋 and 𝑌∗
Estimate 𝑅 and 𝒕
Repeat
Fast, but easy to fail due to hard correspondence.

Algorithms for registration
Horn’s method
• Corresponding point sets are given.
• Estimate R and t.
ICP (Iterative closest point)
• Unknown correspondence.
• Fast, standard.
• Easily fail due to local minimum.
• A lot of variants follow.
Softassign
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
EM-ICP
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
Registration algorithm

Softassign: soft correspondence.
𝑋
𝑌
𝒙𝑖
𝒚𝑗
𝑚𝑖𝑗
𝑚𝑖𝑗 = ||𝒙𝑖 − 𝑅𝒚𝑗 + 𝒕 ||
𝑀 Weighted Horn’s method with 𝑋 and 𝑌
Estimate 𝑅 and 𝒕
Repeat
Each row and column should be normalized to 1 by Shinkhorn iterations

Shinkhorn iterations
𝑀
Each row and column should be normalized to 1 by Shinkhorn iterations
𝑚𝑖𝑗
sum up to 1
sum up to 1
sum up to 1
⋮
sum up to 1
Repeat row and column normalization until converge.

Shinkhorn iterations
𝑀
Each row and column should be normalized to 1 by Shinkhorn iterations
𝑚𝑖𝑗
sum
up
to 1
sum
up
to 1
sum
up
to 1
⋮
sum
up
to 1
Repeat row and column normalization until converge.

Shinkhorn.GPU (row normalization)
𝑀
Each row and column should be normalized to 1 by Shinkhorn iterations
𝟏
1 1 1 ⋮
𝑹𝑀
Using sgemv of CUBLAS

Shinkhorn.GPU (row normalization)
𝑀
Each row and column should be normalized to 1 by Shinkhorn iterations
𝑹𝑀
Using CUDA kernel
Row-wise division
Column normalization is done by the same way.

Weighted Horn’s method
𝑋 𝑌 𝑆 = 𝑋 𝑌 𝑆 = 𝑀
3 3
Normal version Weighted version
Using CUBLAS sgemv twice.

Centering.GPU (weighted version)
𝑋
𝑹𝑀 𝟏
1 1 1 ⋮
𝑋
∗ ∗
CUDA kernel
CUBLAS sasum
𝑹𝑀 𝟏
∗
CUBLAS sasum
𝒙
Weighted center
Same as for 𝒚
Weighted sum

Pipeline of Softassing.GPU
𝑋
𝑌
𝑋
𝑌
𝑀
𝑋 𝑌 𝑆 = 𝑀
Compute 𝑀 with CUDA kernel
Shinkhorn.GPU
Centering.GPU
𝑆
Weighted Horn’s method
𝐾
𝑅 and 𝒕
Solve Eigenvalue problem
𝒙 , 𝒚

Algorithms for registration
Horn’s method
• Corresponding point sets are given.
• Estimate R and t.
ICP (Iterative closest point)
• Unknown correspondence.
• Fast, standard.
• Easily fail due to local minimum.
• A lot of variants follow.
Softassign
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
EM-ICP
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
Registration algorithm

EM-ICP: soft correspondence.
𝑌
𝑋
𝒚𝑖
𝒙𝑗
𝑑𝑖𝑗
𝑑𝑖𝑗 = ||𝒙𝑗 − 𝑅𝒚𝑖 + 𝒕 ||
𝐴 Weighted Horn’s method with 𝑋′ and 𝑌
Estimate 𝑅 and 𝒕
Repeat
𝑋′
𝒙′𝑖
Pseudo correspondence 𝑋′
Each row is normalized once.

Row normalization on GPU
𝐴
𝟏
1 1 1 ⋮
𝑪
Using sgemv of CUBLAS
Not normalized yet.

Row normalization on GPU
𝐴
Using CUDA kernel
Row-wise division
+ sqrt
𝑪
Now normalized.

Computing weights
𝐴
𝟏
1 1 1 ⋮
𝝀
Using sgemv of CUBLAS
Now normalized.

Pseudo correspondence
𝑋
𝐴
𝑋′
CUBLAS sgemv
Centering: same with Softassing.GPU
Now normalized.

Weighted Horn’s method
𝑋′ 𝑌 𝑆 =
3
Weighted version
0
0 𝜆1
𝜆2
⋱
𝝀 𝑋′
∗
CUDA kernel
𝑋
𝑋 ’ 𝑌 𝑆 =
CUBLAS sgemm
3
Weighted version (2 steps)
(not efficient)

Pipeline of EM-ICP.GPU
𝑋
𝑌
𝑋
𝑌
𝐴
Compute 𝐴with CUDA kernel
Row normalization on GPU
Centering.GPU
𝑆
2 step weighted Horn’s method
𝐾
𝑅 and 𝒕
Solve Eigenvalue problem
𝒙 , 𝒚
𝝀 𝑋′
∗
𝑋
𝑋′
𝑌
𝑆 =

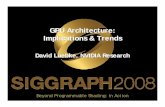
Computing time over different number of points
Successfully aligned 5000 points less than 7 seconds.
Slightly fast, but failed.
GPU: GeForce8800GT CPU: Intel Core2 Quad + OpenMP (4 cores)

Summary
Implemented 3D registration algorithms on a GPU are: Softassign,
EM-ICP,
Weighted Horn’s method.
EM-ICP.GPU is able to align 5000 points within 7 seconds,
60 times faster than EM-ICP.CPU,
more robust than ICP.CPU.
Code, binary, and movies are available at: http://home.hiroshima-u.ac.jp/tamaki/study/cuda_softassign_emicp/

Limitations
Number of points
Should be less than 8000 for GeForce8800GT with 512MB memory.
More memory, more points.
Stopping condition
requires to store whole matrix 𝑀 or 𝐴, and compare with previous ones: inefficient.
Hence, currently, number of iterations is fixed.

Algorithms for registration
Horn’s method
• Corresponding point sets are given.
• Estimate R and t.
ICP (Iterative closest point)
• Unknown correspondence.
• Fast, standard.
• Easily fail due to local minimum.
• A lot of variants follow.
Softassign
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
EM-ICP
• Unknown correspondence.
• Robust.
• Very slow because of iterations.
Registration algorithm