Smart Wiper

of 22
-
Upload
amit-bakle -
Category
Documents
-
view
253 -
download
3
Transcript of Smart Wiper
-
8/12/2019 Smart Wiper
1/22
TABLE OF CONTENTS
1. Introduction ............................................................................................ Error! Bookmark not defined.1.1. History.......................................................................................................................... 31.2 Need Of Smart wiper System4
2. Product Description and Goals ........................................................................................................... 53. Design Approach and Details .............................................................................................................. 6
3.1.Design Approach............................................................................................................ 63.2.Codes and Standards..................................................................................................... 17
4. Project Demonstration ........................................................................... Error! Bookmark not defined.5. ADVANTAGES .................................................................................................................................. 196. DISADVANTAGES ........................................................................................................................... 197. APLLICATION..208. SUMMARY AND CONCLUSION219. REFERENCES22
-
8/12/2019 Smart Wiper
2/22
INTRODUCTION
I have pleasure in introducing our new project SMART WIPER
SYSTEM, which is fully equipped by sensors circuit and wiper motor.It is a genuine
project which is fully equipped and designed for Automobile vehicles. This forms an
integral part of best quality.
The Automatic rain operated wiper system is a fully automation project.
This is an era of automation where it is broadly defined as replacement of
manual effort by mechanical power in all degrees of automation.
Degrees of automation are of two types, viz.
Full automation.
Semi automation.
In semi automation a combination of manual effort and mechanical power is
required whereas in full automation human participation is very negligible.
-
8/12/2019 Smart Wiper
3/22
HISTORY
The first mechanical windshield wipers had to be operated by hand! Either the driver or a
passenger had to work a crank to make the wipers go back and forth. Mary Anderson, from New
York City, was awarded a patent in 1903 for a window cleaning device. Once the invention was
protected by patent, she tried to interest companies into producing the device. No one was
interested, so Mary put the patent in a drawer and eventually it expired.With closed bodywork
generally available during the 20s, cars were equipped with windowed doors to protect
passengers from bad weather and dust. From 1916, manual windshield wipers replaced
squeegees. Automatic windshield wipers were invented in 1921. Called "Folberths," after their
inventors, Fred and Willaim Folberth, they were powered by an "air engine," a device connected
by a tube to the inlet pipe of the cars motor.
The electric version, attached to the top of the windshield, was created by Bosch in 1926, but
was reserved only for luxury models.
Robert Kearns (1928-2005) patented intermittent powered wipers in 1967. He demonstrated the
system to Ford Motor Company, which introduced automobiles with intermittent wipers in 1978.
Other automakers soon followed.
Robert W. Kearns spent years in litigation against Ford Motor and Chrysler for using his idea,
and eventually won multimillion-dollar judgments. Robert Kearns, 77, died February 26, 2005.
The National Highway and Transportation Safety Association reports that twenty-six
percent of all car accidents are caused by distractions due to talking on cell phones, eating while
driving, and other similar distractions that take a drivers focus off the road . The distraction
considered in this project is the adjustment of wiper speed based on the intensity of precipitation
-
8/12/2019 Smart Wiper
4/22
falling. By eliminating the need for drivers to adjust wiper speed while driving, the number of
accidents caused by distraction can be slightly reduced.
In full automation human participation is very negligible.
-
8/12/2019 Smart Wiper
5/22
NEED FOR AUTOMATION:
Automation can be achieved through computers, hydraulics, pneumatics, robotics,etc., of these sources, pneumatics form an attractive medium for low cost automation.
Automation plays an important role in automobile.
Nowadays almost all the automobile vehicle is being atomized in order to product
the human being. The automobile vehicle is being atomized for the following reasons.
To achieve high safety
To reduce man power
To increase the efficiency of the vehicle
To reduce the work load
To reduce the vehicle accident
To reduce the fatigue of workers
Less Maintenance cost
The major components of the Automatic rain operated wiper are follows
Conductive Sensor
Class frame and Supporting Structure
Battery
Wiper Motor and its arrangement
-
8/12/2019 Smart Wiper
6/22
1. PRODUCT DESCRIPTION AND GOALS Detect intensity of rainfall
Activate wipers automatically once rainfall is detected
Avoid adverse effects of extraneous and environmental factors
Meet or exceed the response time of the driver
Make adaptable to all vehicles
Develop high reliability
Create with ease of installation
The primary goal is to automatically detect rainfall and activate the wipers without driver
interaction.
-
8/12/2019 Smart Wiper
7/22
-
8/12/2019 Smart Wiper
8/22
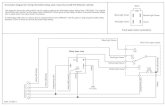
The second diagram represents a more detailed version of the functional diagram.
Figure 2 High-level System Block Diagram
The rain detection unit uses two types of sensors whose outputs are normalized by an input
signal module. The data processing is performed by a microcontroller, and its results are fed into
an output signal module which is the input to the motor control box.
ImpedanceSensor
IR
Sensor
User
Interface
InputSignal
Module Microcontroller
Output
Signal
Module
Motor
Controller
Motor
Rain DetectionData Processing
Motor Control
-
8/12/2019 Smart Wiper
9/22
2.1.2.Rain Detection Unit2.1.2.1. Impedance Sensors
The system detects rain by using two sorts of sensors. One of them is the impedance grid
sensor shown infig.3. The grid is made of two comb-like copper plates separated by a minimum
distance of8
1 in. The sensor is glued to the windshield glass with the help of a strong adhesive
material. The thin configuration of the plates allows the wiper to slide over without peeling them
off. When the plates are dry, the resistance between the two plates is very high, but when water
is between the plates, current can flow between the plates, thus decreasing the resistance. This
operation allows this design to be used as a rain sensor. The sensor becomes
Figure 3 Impedance Grid Sensor with Water Varying Electrical Conduction
operational when one plate is connected to a power source, and the other plate is taken as the
sensor output.
-
8/12/2019 Smart Wiper
10/22
The separation between the plates is strongly related to the sensors sensitivity and its
detection rate [4]. Increasing the distance between the plates decreases the failure rate but it also
decreases the sensitivity of the sensor which is inversely related to the system response time.
Another design issue with the impedance grid sensor is the fact that it can act as an antenna and
produce a floating voltage which can trigger a false detection. A solution to the problem consists
of reducing the sensors size and grounding the output signal appropriately. Two other issues of
concern are copper oxidation (rust) and physical deformation caused by the frictional motion of
the wipers over the grid sensor. The grid sensor in figure 3 is effective at detecting rain, but it
does a poor job relaying how much water is on the windshield glass at any point in time. Since
the system should be fully automatic, there is a need to develop a way to measure the average
distribution of water falling on the glass in order to control the wipers speed. A modified
version of the impedance sensor was designed to provide better intensity measurements. The
new design consists of spacing isolated vertical plates from a single power plate as shown in
Figure 4. Measuring the voltage at these different plates provides a more accurate way of
determining the rate of rainfall. The sensing device can be mounted anywhere on the windshield
where there is no contact with the wipers. This upgraded version of rain sensor suffers from the
same issues as its predecessor, but it provides more functionality.
-
8/12/2019 Smart Wiper
11/22
Figure 4 Three-channel Rain Sensor for Speed Control
-
8/12/2019 Smart Wiper
12/22
2.1.2.2. Optical SensorsThe optical sensors are used to bounce beams of light through the windshield, and look for
disturbances in the beams caused by raindrops at the outside surface of the windshield. The rain
sensor has an emitter that emits pulses of light, coupled into the windshield with a lens. These
beams travel through the windshield at about 45 degrees [2]. Through research it was anticipated
that the infra-red beams were to be totally reflected by the outside surface of the windshield into
the receiver [2]. However, when testing the analog IR sensor supplied by Optek Inc., it was
determined that the infra-red beams were not totally reflected by the windshield, but that the
infra-red beams were approximately 30% reflected by the outside surface of the windshield.
Troubleshooting this issue included using different types of glass to reflect the IR beams and
comparing that output with the results of reflecting the IR beams off a white sheet of paper. In
conclusion, it was determined that the light beams from the IR sensors were not totally reflected
by any type of glass and therefore the design approach was modified. Although the glass did not
reflect 100 percent of the light emitted, there was enough light reflected by the glass to detect the
change in reflectivity due to a raindrop. The downfall is that the rain threshold for the sensor
was lowered and it was not as easy to determine when moisture was present. If rain drops are
present on the outside surface of the windshield, some of the beams escape and this reduces the
intensity of the beams. The detector will measure this reduction in intensity and communicate
that to the rest of the system that actuates the windshield wipers. Error! Reference source not
ound.shows a diagram of the operation.
-
8/12/2019 Smart Wiper
13/22
Figure 5 Diagrams of IR Sensor
-
8/12/2019 Smart Wiper
14/22
2.1.2.3. Input Signal ModuleThe input signal modules first function is to normalize all sensor signalsso that the
microcontroller can safely interface with the rain detection unit by limiting the amount of
incoming current. Each sensor is dedicated a separate part within the input signal module.
Figure 6 shows the internal circuit corresponding to the impedance grid sensor. All other sensors
have a similar input circuit.
Figure 6 Input Circuit for Impedance Grid Sensor
The sensitivity is controlled by a potentiometer that can be manually tuned by a user. The
protective resistor below the potentiometer makes sure that the overall system remains stable and
functional regardless of users settings. The capacitor introduces a low-pass filter that helps
stabilize the sensor output so that the microcontroller makes more accurate readings. The input
circuit also solves the floating voltage problem by providing a ground between the sensor and the
microcontroller.
-
8/12/2019 Smart Wiper
15/22
2.1.3.Data Processing Unit
2.1.3.1. Microcontroller and Control Logic
The data processing unit is composed of a microcontroller and an output signal module.
The AVR Atmega8 microcontroller was finally selected over the initial TI MSP430 because of
its higher output power and number of analog-to-digital channels. The communication between
the computer programmer and the microcontroller is done via serial peripheral interface bus
(SPI).
Figure 7 Summary of System Control Logic
Once the system is enabled, the system initialization block checks if the sensors are
operational, sets the corresponding input and output pins, and determines if the power is high
enough to keep the microcontroller running. After performing all the necessary checks, the
program reads voltages from the impedance grid sensor and IR sensor in a sequential order. If
water is detected, the microcontroller sends a signal to a power relay so that the wiper motor is
activated at its lowest speed. Afterward, the microcontroller reads the speed control sensor and
determines the appropriate motor speed by powering other relays.
-
8/12/2019 Smart Wiper
16/22
The additional relays affects change the amount of power going to the motor. The loop
continues as long as all the sensors detect water on the windshield.
2.1.3.2. Output Signal ModuleThe output signal module is the bridge between the design system and the existing
automobile windshield wiper system. Figure 8 depicts how the microcontroller is connected to
the relays driving the motor control board.
Figure 8 Relays and Microcontroller Connections
The control process for the project stops after the output signal module because the motor control
unit is foreign to the system. However, for installation purposes, the user should be able to
integrate the design product to an existing automobile. Therefore, only general interfacing
-
8/12/2019 Smart Wiper
17/22
information is required to be provided to the user. However, in order to demonstrate the overall
project, a motor and a control module circuit were acquired and tested.
2.2.Codes and Standards
The sensor and the microcontroller are governed by universal standards such as the NEC,
the National Electric Code [7]. The microcontroller will also abide by the SPI protocol in order
to load in a program from the PC. In automobiles, information from one sensor and/or data from
one system can be communicated with other systems using multiplex wiring to reduce the
number of sensors and the amount of wire used in a vehicle [7]. Two predominant protocols
have emerged as standards, but several other protocols exist that are specific to manufacturers'
applications. The Society of Automotive Engineers (SAE) has established SAE J1850 as the
standard for multiplexing and data communications in U.S. automobiles [8]. However, data
communications for trucks and On-Board Diagnostics II (OBDII) are based on the Controller
Area Network (CAN) protocol developed by Robert Bosch GmbH [9].
The SAE Vehicle Network for Multiplexing and Data Communications (Multiplex)
Committee has defined three classes of vehicle networks: Classes A, B and C [8]. Class A is for
low-speed applications such as body lighting [8]. Class B is for data transfer between nodes to
eliminate redundant sensors and other system elements [8]. Class C is for high-speed
communications and data rates typically associated with real-time control systems [8]. The
project will be considered as a class C application.
-
8/12/2019 Smart Wiper
18/22
3. PROJECT DEMONSTRATIONThe project demonstration for the smart wiper system prototype tests for the successful
detection of rain, tests for the intensity of that rain, and activates one of four speeds of the
windshield wiper. The system activates within 500 milliseconds as originally specified under the
voltage requirements. The prototype achieves all the product goals and specifications set out by
the proposal, however, the temperature range specification was not able to be tested. The
prototype was tested in a room temperature environment so additional testing need be performed
to determine whether the system has the same functionality at the extreme temperatures of the
technical specifications. Figure 10 shows a photograph of the actual prototype of the project. As
can be seen from the figure roughly 3 ft of plexiglass, mounted in a wooden frame, serves as the
automobile windshield. The plexiglass is angled at about 37 degrees to mimic automobile
windshields. Mounted below the plexiglass are the wiper linkage kit as well as the wiper pulse
motor controls and wiper motor. The IR sensors are located at position A on the figure and the
impedance sensors are located at position B. The system controls are housed behind the
plexiglass including the microcontroller and all input/output signal modules. To start the system,
the user would first connect the power leads to the breadboard with a DC power supply. System
should be supplied with a voltage greater than 5 volts. User should be sure to connect the
positive terminal of the voltage source to the red post of the breadboard #1 and the negative
terminal to the black post. Once the system is powered up, the user will also need to connect 12
V and GND to breadboard #2 which is connected to the relays that control the wiper motor
housed below the plexiglass. After these connections are made, the user will turn on the system
by switching on the power switch on breadboard #1. Rain will be simulated using a spray bottle;
the user will spray water on the glass near any one of the sensors and the system will react within
-
8/12/2019 Smart Wiper
19/22
500 milliseconds. The speeds of the windshield wiper will vary depending on the amount of
water sprayed onto the plexiglass.
Figure 10.a Microncontroller and Relays
9 Figure 10.b Project Prototype
A
B
B
Breadboard #1
Breadboard #2
-
8/12/2019 Smart Wiper
20/22
10
ADVANTAGES
Low cost automation project.
Free from wear adjustment.
Less power consumption
Operating Principle is very easy.
Installation is simplified very much.
It is possible to operate Manually/automatically by proving
On/Off switch.
Sensor cost is very low due to conductive sensor
APPLICATIONS
Four wheeler application
DISADVANTAGES
1. This system applied in the case of water falling on the class only.
2. Addition cost is required to install this system to four wheeler.
4. SUMMARY AND CONCLUSIONS
-
8/12/2019 Smart Wiper
21/22
In conclusion, the automated wiper system was designed, developed, and demonstrated to
detect rain and actuate the automobile wipers based on the intensity of that rain. The
demonstration is able to simulate the operation of the system as if installed in an automobile.
I was able to successfully complete the project and satisfactorily meet the proposal goal of
automating the drivers response to rain within the specified amount of time of 500 milliseconds.
Though the system functioned as desired, in retrospect i would have selected different design
approaches. After noticing that more accuracy was required from the IR sensor to adequately
detect the intensity of rain we would have selected a more applicable IR sensor. The initial goals
and objectives were to expand upon existing automatic wiper technologies to make a more
reliable yet economically priced system. As shown by the project demonstration and the cost
analysis, these goals and objectives were met. Recommendations for future versions of the
product include using more sophisticated IR sensors, including a voice recognition feature, and
raising all the power windows in the vehicle when rain is detected. Although the project met our
goals, another production cycle should be initiated to improve the reliability of the system and
include the features mentioned in the future versions.
-
8/12/2019 Smart Wiper
22/22
REFERENCES
[1] NHTSA Data Sheet, 2001, Available HTTP:http://www-nrd.nhtsa.dot.gov/departments/nrd-
12/809-716/pages/longdesc.htm
[2] The Rain Tracker Makes Driving More Enjoyable, [Online Document], Available HTTP:
http://www.raintracker.com/ProductInfo.htm
[3] TRW Automotive Electronics: Rain Sensor, 2007, [Online Document], Available HTTP:
http://www.trw.com/images/rain_sensor.pdf
[4] M. Ucar, H. Ertunc, and O. Turkoglu, The Design and Implementation of Rain Sensitive
Triggering System for Windshield Wiper Motor, In IEEE IEMDC, 2001, pp. 329-336.
[5] H. Kurihata, T. Takahashi, I. Ide, Y.Mekada, H. Murase, Y. Tamatsu, and T. Miyahara,
Rainy Weather Recognition from in-Vehicle Camera Images for Driver Assistance , In
IEEE Intelligent Vehicles Symposium, 2005, pp. 205-210
[7] National Fire Protection Association, 2007, [Online Document], Available HTTP:
http://www.nfpa.org/
[8]Atsushi Yamashita, Susumu Kato and Toru KanekoRobust Sensing against Bubble Noises inAquatic Environments with a Stereo Vision System
[9]CAN Specification, 1991, [Online Document], Available HTTP:
http://esd.cs.ucr.edu/webres/can20.pdf
[10] G. Muller, Windshield Wiper System with Rain Detector, U.S.patent no. 5015931, issued
June 11, 1991
[11]Joonwoo Son Seon Bong LeeIntelligent Rain Sensing and Fuzzy Wiper Control Algorithm for Vision-based Smart Windshield WiperSystem.
[12]Abhishek Shukla Rohan Dwivedi Design and Implementation of Vision SystemAid in Windscreen Assembly
http://www-nrd.nhtsa.dot.gov/departments/nrd-http://www-nrd.nhtsa.dot.gov/departments/nrd-http://www.raintracker.com/ProductInfo.htmhttp://www.raintracker.com/ProductInfo.htmhttp://www.trw.com/images/rain_sensor.pdfhttp://www.trw.com/images/rain_sensor.pdfhttp://www.trw.com/images/rain_sensor.pdfhttp://www.trw.com/images/rain_sensor.pdfhttp://www.nfpa.org/http://www.nfpa.org/http://esd.cs.ucr.edu/webres/can20.pdfhttp://esd.cs.ucr.edu/webres/can20.pdfhttp://esd.cs.ucr.edu/webres/can20.pdfhttp://www.nfpa.org/http://www.trw.com/images/rain_sensor.pdfhttp://www.raintracker.com/ProductInfo.htmhttp://www-nrd.nhtsa.dot.gov/departments/nrd-