
SMART DUST from K. Pister, J. Kahn, B. Boser, and S. Morris Presented for Software Design by...
21
SMART DUST SMART DUST from K. Pister, J. Kahn, B. Boser, and S. Morris Presented for Software Design by Xiaozhou David Zhu June 22, 2001 Kent state University
-
Upload
cornelius-blair -
Category
Documents
-
view
219 -
download
1
Transcript of SMART DUST from K. Pister, J. Kahn, B. Boser, and S. Morris Presented for Software Design by...

SMART DUST
SMART DUSTfrom
K. Pister, J. Kahn, B. Boser, and S. Morris
Presented for Software Design
by Xiaozhou David Zhu
June 22, 2001
Kent state University

SMART DUST
Goals
• Autonomous sensor node (mote) in 1 mm3
• MAV delivery
• Thousands of motes
• Many interrogators
• Demonstrate useful/complex integration in 1 mm3

SMART DUST
COTS Dust
GOALS:
• Create a network of sensors
• Explore system design issues
• Provide a platform to test Dust components
• Use off the shelf components

SMART DUST
COTS Dust - RF Motes
• Atmel Microprocessor• RF Monolithics transceiver
• 916MHz, ~20m range, 4800 bps• 1 week fully active, 2 yr @1%
N
S
EW 2 Axis Magnetic Sensor
2 Axis Accelerometer
Light Intensity Sensor
Humidity Sensor
Pressure Sensor
Temperature Sensor

SMART DUST
COTS Dust - Distributed Algorithms
• 1”, $100 Sensor nodes are easy• algorithms?
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5-1
0
1
2
3
4
5
SMART DUST
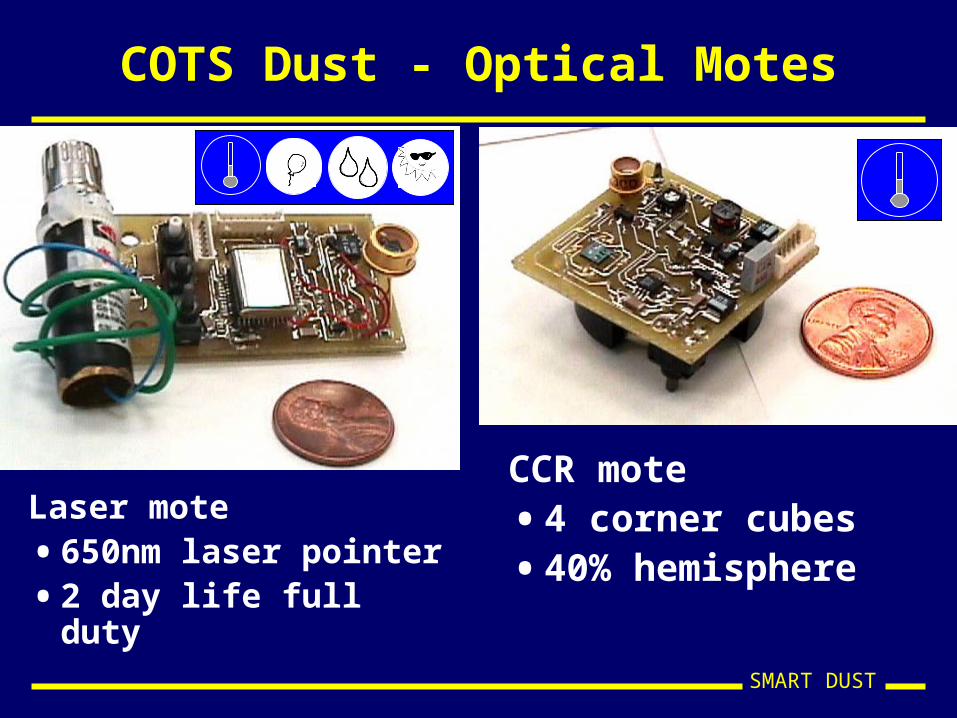
COTS Dust - Optical Motes
Laser mote
• 650nm laser pointer
• 2 day life full duty
CCR mote
• 4 corner cubes
• 40% hemisphere

SMART DUST
CCR Interrogator
Top View of the Interrogator
CCD Camera Lens
Frequency-Doubled Beam45o mirror
Polarizing Beamsplitter
Quarter-wavePlateFilter
0.25% reflectance on each surface
YAG Green Laser Expander

SMART DUST
Video Semaphore Decoding
Diverged beam @ 300m
Shadow or full sunlight
San Francisco (Coit Tower) to
Berkeley (Cory Hall)
SMART DUST
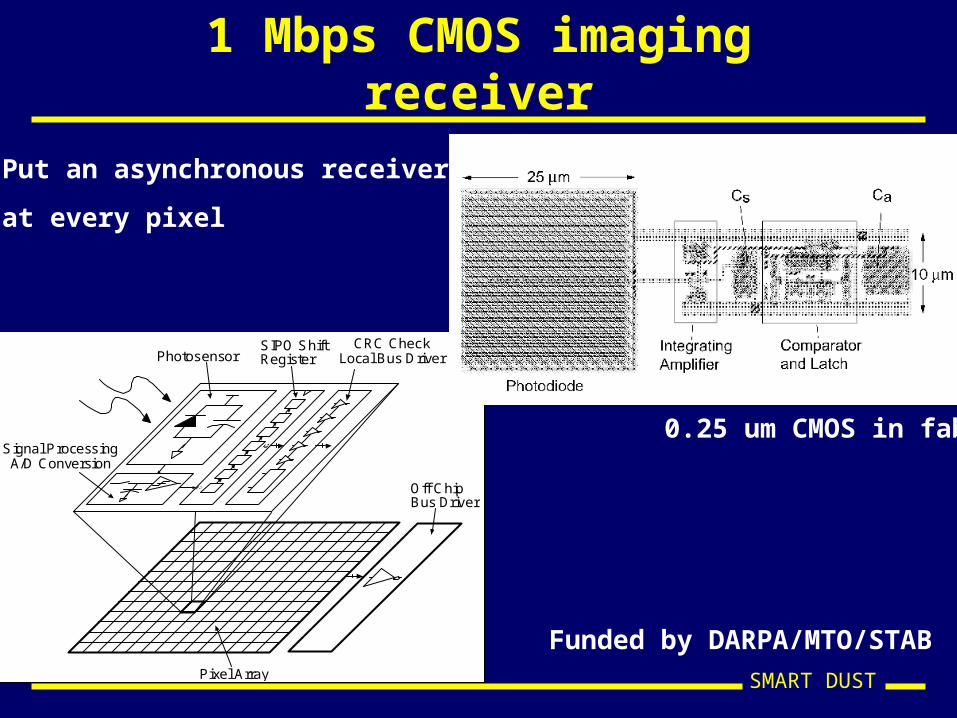
1 Mbps CMOS imaging receiver
Photosensor
Signal ProcessingA/D Conversion
SIPO ShiftRegister
CRC CheckLocal Bus Driver
Off ChipBus Driver
Pixel Array
Put an asynchronous receiver
at every pixel
Funded by DARPA/MTO/STAB
0.25 um CMOS in fab

SMART DUST
Micro Mote - First Attempt
300 um

SMART DUST
2D beam scanning
laser
lens
CMOS ASIC
Steering Mirror
AR coated dome

SMART DUST
6-bit DAC Driving Scanning Mirror
10 20 30 400
0.2
0.4
0.6
0.8
Time (seconds)
Nor
mal
ized
bea
m p
ositi
on
• Open loop control
• Insensitive to disturbance
• Potentially low power

SMART DUST
~8mm3 laser scanner
Two 4-bit mechanical DACs control mirror scan angles.
~6 degrees azimuth, 3 elevation

SMART DUST
Power and Energy
• Sources• Solar cells• Combustion/Thermopiles
• Storage• Batteries ~1 J/mm3
• Capacitors ~1 mJ/mm3
• Usage• Digital control: nJ/instruction• Analog circuitry: nJ/sample• Communication: nJ/bit

SMART DUST
Combustion
• Solid rocket propellant
• integrated igniter
• thermoelectric generator

SMART DUST
Dust Delivery
• Silicon maple seeds
• Silicon dandelions
LO
AD
SOI Solar Cell Performance
-6.E-06
-4.E-06
-2.E-06
0.E+00
2.E-06
4.E-06
6.E-06
8.E-06
-0.1 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Voltage (V)
Cu
rren
t (A
) an
d P
ow
er (
W)
Current
Power

SMART DUST
MAV Delivery
• 60 mph
• 18 min
• 1 mi comm
Built by MLB Co.
6”
8”

SMART DUST
24” Bat
40 mph top speed30 minute loiterautopilot: pressure
sensor, gyros, XLs2 planes, 1 ground station,
in 1 suitcase
spyplanes.com

SMART DUST
Marine LOE 4
3 MAVs participated, 1 flew
7 sortieson station in minutes

SMART DUST
Goal for ‘01

SMART DUST
Virtual Keyboard


















