SlaterFrank IntroductionToTheoreticalPhysics Text
597
iTheoretical ;>la , _.,. __ ; ,_-_
-
Upload
oliverbardin -
Category
Documents
-
view
47 -
download
15
description
An old book on physics
Transcript of SlaterFrank IntroductionToTheoreticalPhysics Text
-
iTheoretical
;>la
. , _.,.__
;
,_-_
-
INTERNATIONAL SERIES IN PHYSICSLEE A. DuBRIDGE, Consulting Editor
INTRODUCTION TO THEORETICAL PHYSICS
The quality of the materials used in themanufacture of thin book is governed by
nnn tinned postwar shortages.
-
INTERNATIONAL SERIES IN PHYSICS
LEE A. DuBRIDGE, Consulting Editor
Backer and GoudsmitAtomic Energy StatesBitterIntroduction to FerromacnetismClarkApplied X-raysCondon and MorseQuantum MechanicsCurtisElectrical MeasurementsDaveyCrystal Structure and Its ApplicationsEdwardsAnalytic and Vector MechanicsEldridgeThe Physical Basis op ThingsHardy and PerrinThe Principles of OpticsHarnwellPrinciples of Electricity and Electro-
magnetismHarnwell and LivingoodExperimental Atomic PhysicsHouston-Principles of Mathematical PhysicsHughes and DuBridgePhotoelectric PhenomenaHund-High-frequency MeasurementsHundPhenomena in High-frequency SystemsKembleThe Fundamental Principles of Quantum
MechanicsKennardKinetic Theory of GasesRoller-The Physics of Electron TubesMorseVibration and SoundMusicalThe Flow of Homogeneous Fluids through
Porous MediaPauling and GoudsmitThe Structure of Line SpectraRichtmyer and KennardIntroduction to Modern
Physics
Ruarh and UreyAtoms, Molecules and QuantaSeitzThe Modern Theory of SolidsSlaterIntroduction to Chemical PhysicsSlaterMicrowave TransmissionSlater and FrankIntroduction to Theoretical
PhysicsSmytheStatic and Dynamic ElectricityStrattonElectromagnetic TheoryWhiteIntroduction to Atomic SpectraWilliamsMagnetic Phenomena
Dr. F. K. Richtmyer was consulting editor of the aeries from itsinception in 1029 until his death in 1939.
-
INTRODUCTION TOTHEORETICAL PHYSICS
BY
JOHN C, SLATER, Ph.D.Professor of Physics, Massachusetts Institute of Technology
AND
NATHANIEL H. FRANK, Sc.D.Assistant Professor of Physics, Massachusetts
Institute of Technology
First EditionTenth Impression
McGRAW-HILL BOOK COMPANY, Inc.NEW YORK AND LONDON
1933
-
CoPYHIGHT, 1933, BY THB
McGkaw-Hili, Book Company, Inc.
PHINTED IN THE UNITED STATES OF AMEBICA
All rights reserved. This book, orparts thereof, may not be reproducedin any form without permission of
the publishers.
CITY Of UVERPOOt
COUKE OF TECHNOLOGY UBRARV
-
PREFACEThe general plan of a book is often clearer if one knows how it
came to be written. This book started from two separatesources. First, it originated in a year's lecture course of thesame title, covering about the first two-thirds of the ground pre-sented here, the part on classical physics. This course grew outof the conviction that the teaching of theoretical physics in anumber of separate courses, as in mechanics, electromagnetictheory, potential theory, thermodynamics, tends to keep astudent from seeing the unity of physics, and from appreciatingthe importance of applying principles developed for one branchof science to the problems of another. The second source of thisbook was a projected volume on the structure of matter, dealingprincipally with applications of modern atomic theory to thestructure of atoms, molecules, and solids, and to chemicalproblems. As work progressed on this, it became evident thatthe structure of matter could not be treated without a thoroughunderstanding of the principles of wave mechanics, and thatsuch an understanding demanded a careful grounding in classicalphysics, in mechanics, wave motion, the theory of vibratingsystems, potential theory, statistical mechanics, where manyprinciples needed in the quantum theory are best introduced.The ideal solution seemed to be to combine the two projects,including the classical and the more modern parts of theoreticalphysics in a coherent whole, thus further increasing the unity oftreatment of which we have spoken.Two general principles have determined the order of presenting
the material: mathematical difficulty, and order of historicaldevelopment. Mechanics and problems of oscillations, involvingordinary differential equations and simple vector analysis,come first. Then follow vibrations and wave motion, intro-ducing partial differential equations which can be solved byseparation of variables, and Fourier series. Hydrodynamics,electromagnetic theory, and optics bring in more general partialdifferential equations, potential theory, and differential vectoroperations. Wave mechanics uses almost all the mathematicalmachinery which has been developed in the earlier part of thebook. It is natural that the historical order is in general tho
-
Vi PREFACE
same as the order of increasing mathematical difficulty, for each
branch of physics as it develops builds on the foundation of
everything that has gone before. In cases where the two
arrangements do not coincide, we have grouped together subjectsof mathematical similarity, thus emphasizing the unity of which
we have spoken.In a book of such wide scope, it is inevitable that many impor-
tant subjects are treated in a cursory manner. An effort hasbeen made to present enough of the groundwork of each subject sothat not only is further work facilitated, but also the position ofthese subjects in a more general scheme of physical thought isclearly shown. In spite of this, however, the student will of
course make much use of other references, and we give a list ofreferences, by no means exhaustive, but suggesting a few titlesin each field which a student who has mastered the material ofthis book should be able to appreciate.At the end of each chapter is a set of problems. The ability
to work problems, in our opinion, is essential to a proper under-standing of physics, and it is hoped that these problems willprovide useful practice. At the same time, in many cases, theproblems have been used to extend and amplify the discussion ofthe subject matter, where limitations of space made such dis-cussion impossible in the text. The attempt has been made,though we are conscious of having fallen far short of succeeding
in it, to carry each branch of the subject far enough so thatdefinite calculations can be made with it. Thus a far surermastery is attained than in a merely descriptive discussion.
Finally, we wish to remind the reader that the book is verydefinitely one on theoretical physics. Though at times descrip-tive material, and descriptions of experimental results, areincluded, it is in general assumed that the reader has a fairknowledge of experimental physics, of the grade generally covered
in intermediate college courses. No doubt it is unfortunate, inview of the unity which we have stressed,, to separate the theoret-ical side of the subject from the experimental in this way. Thisis particularly true when one remembers that the greatest diffi-culty winch the student has in mastering theoretical physicscomes in learning how to apply mathematics to a physical situa-tion, how to formulate a problem mathematically, rather than insolving the problem when it is once formulated. We have triedwherever possible, in problems and text, to bridge the gap
-
PREFACE yii
between pure mathematics and experimental physics. But theonly satisfactory answer to this difficulty is a broad training inwhich theoretical physics goes side by side with experimentalphysics and practical laboratory work. The same ability toovercome obstacles, the same ingenuity in devising one methodof procedure when another fails, the same physical intuitionleading one to perceive the answer to a problem through a massof intervening detail, the same critical judgment leading one todistinguish right from wrong procedures, and to appraise resultscarefully on the ground of physical plausibility, are required intheoretical and in experimental physics. Leaks in vacuum sys-tems or in electric circuits have their counterparts in the manydisastrous things that can happen to equations. And it is oftenas hard to devise a mathematical system to deal with a difficultproblem, without unjustifiable approximations and impossiblecomplications, as it is to design apparatus for measuring a diffi-cult quantity or detecting a new effect. These things cannot betaught. They come only from that combination of inherentinsighl and faithful practice which is necessary to the successfulphysicist. But half the battle is over if the student approachestheoretical physics, not as a set of mysterious formulas, or as adull routine to be learned, but as a collection of methods, of tools,of apparatus, subject to the same sort of rules as other physicalapparatus, and yielding physical results of great importance.The title of this book might have been aptly extended to "Intro-duction to the Methods of Theoretical Physics," for the aim hasconstantly been, not to teach a great collection of facts, but toteach mastery of the tools by which the facts have been dis-covered and by which future discoveries will be made.
In a subject about which so much has been written, it seemshardly practicable to acknowledge our indebtedness to anyspecific books. From many of those mentioned in the sectionon suggested references, and from many others, we have receivedideas, though the material in general has been written withoutconscious following of earlier models. We wish to expressthanks to several of our colleagues for suggestions, and partic-ularly to Professors P. M. Morse and J. A. Stratton, who haveread the manuscript with much care and have contributed greatlyby their discussions.Cambridge, Mass., J. C, S.
September, 1933. N. H. F.
-
CONTENTSPage
Pkeface . V
Chapter I
POWER SERIESIntroduction 1
1. Power Series 22. Small Quantities of Various Orders 33. Taylor's Expansion 44. The Binomial Theorem 46. Expansion about an Arbitrary Point 46. Expansion about a Pole 57. Convergence 5
Problems 8
Chapter II
POWER SERIES METHOD FOR DIFFERENTIAL EQUATIONSIntroduction, 10
8. The Fallino Body. 119. Falling Body with Viscosity 11
10. Particular and General Solutions for Falling Body withViscosity, , 14
11. Electric Circuit Containing Resistance and Inductance 16Problems 17
Chapter III
POWER SERIES AND EXPONENTIAL METHODS FOR SIMPLEHARMONIC VIBRATIONS
Introduction. 1912. Particle with Linear Restoring Force 1913. Oscillating Electric Circuit 2014. The Exponential Method of Solution 2115. Complex Exponentials 2216. Complex Numbers 2317. Application of Complex Numbers to Vibration Problems 25
Problems 26
Chapter IV
DAMPED VIBRATIONS, FORCED VIBRATIONS, ANDRESONANCE
Introduction 2718. Damped Vibrational Motion 27
-
x CONTENTSPage
19. Damped Electrical Oscillations 2820. Initial Conditions for Transients. 2921. ['"uiu.'ED Vibrations and Resonance 2922. Mechanical Resonance 3023. Electrical Resonance 3124. Superposition of Transient and Forced Motion 3325. Motion under General External Forces 3526. Generalizations Regarding Linear Differential Equations 36
Problems 37
Chapter VENERGY
Introduction 3927. Mechanical Energy 4028. Use of the Potential for Discussing the Motion of a System 4229. The Rolling-ball Analogy 4530. Motion in Several Dimensions. 46
Problems 46
Chapter VI
VECTOR FORCES AND POTENTIALSIntroduction. 48
31. Vectors and Their Components 48
32. Scalar Product of Two Vectors 4933. Vector Product of Two Vectors 5034. Vector Fields 51
35. The Energy Theorem in Three Dimensions 5236. Line Integrals and Potential Energy 52
37. Force as Gradient of Potential 5338. Equipotential Surfaces 54
39. The Curl and the Condition for a Conservative System 5540. The Symbolic Vector V 55
Problems ^
Chapter VII
LAGRANGE'S EQUATIONS AND PLANETARY MOTIONIntroduction 58
41. Lagrange's Equations 58
42. Planetary Motion **043. Energy Method for Radial Motion in Central Field ... 6144. Orbits in Central Motion 245. Justification of Lagrange's Method 64
Problemb "'
Chapter VIII
GENERALIZED MOMENTA AND HAMILTON'S EQUATIONSIntroduction
46. Generalized Forces.6969
-
CONTENTS xiPage
47. Generalized Momenta 7048. Hamilton's Equations of Motion 7149. General Proof of Hamilton's Equations 7250. Example of Hamilton's Equations 7451. Applications of Lagrange's and Hamilton's Equations ... 75
Problems. . . 76
Chapter IX
PHASE SPACE AND THE GENERAL MOTION OF PARTICLESIntroduction 79
52. The Phase Space 8053. Phase Space for the Linear Oscillator 8154. Phase Space for Central Motion 8255. noncentkal two-dimensional motfon 8356. Configuration Si'ace and Momentum Space 8357. The Two-dimensional Oscillator 845S. Methods of Solution 8659. Contact Transformations and Angle Variables 8760. Methods of Solution for Nonperiodic Motions 90
Problems 90
Chapter XTHE MOTION OF RIGID BODIES
Introduction 9261. Elementary Theory of Precessing Top 9262. Angular Momentum, Moment of Inertia, and Kinetic Energy 9463. The Ellipsoid of Inertia; Principal Axes of Inertia .... 9564. The Equations of Motion 9665. Euler's Equations 9866. Torque-free Motion of a Symmetric Rigid Body 9867. Euler's Ancles 10068. General Motion of a Symmetrical Top under Gravity . . . 10269. Precession and Nutation 104
Problems 105
Chapter XI
COUPLED SYSTEMS AND NORMAL COORDINATESIntroduction 107
70. Coupled Oscillators 10771. Normal Coordinates Ill72. Relation of Problem of Coupled Systems to Two-dimen-
sional Oscillator 11473. The General Problem of the Motion of Several Particles 117
Problems 118
Chapter XII
THE VIBRATING STRING, AND FOURIER SERIESIntroduction 120
74. Differential Equation of the Vibrating String 120
-
XU CONTENTSPage
75. The Initial Conditions for the String 12276. Fourier Series 12377. Coefficients of Fourier Series 12478. Convergence of Fourier Series 12579. Sine and Cosine Series, with Application to the String 12680. The String as a Limiting Problem of Vibration of Particles 12881. Lagrange's Equations for the Weighted String 13182. Continuous String as Limiting Case 131
Problems 132
Chapter XIII
NORMAL COORDINATES AND THE VIBRATING STRINGIntroduction 134
83. Normal Coordinates 13484. Normal Coordinates and Function Space 13785. Fourier Analysis in Function Space 13986. Equations of Motion in Normal Coordinates 14087. The Vibrating String with Friction 142
Problems 144
Chapter XIV
THE STRING WITH VARIABLE TENSION AND DENSITYIntroduction 146
88. Differential Equation for the Variable String 14689. Approximate Solution for Slowly Changing Density and
Tension 14790. Progressive Waves and Standing Waves 14991. Orthogonality of Normal Functions 15192. Expansion of an Arbitrary Function Using Normal Func-
tions. 15293. Perturbation Theory 15494. Reflection of Waves from a Discontinuity 156
Problems 158
Chapter XVTHE VIBRATING MEMBRANE
Introduction 16095. Boundary Conditions on the Rectangular Membrane . . . 16096. The Nodes in a Vibrating Membrane 16297. Initial Conditions 16298. The Method of Separation of Variables 16399. The Circular Membrane 164
100. The Laplacian in Polar Coordinates. 164101. Solution of the Differential Equation by Separation. . . 165102. Boundary Conditions . 166103. Physical Nature of the Solution 167104. Initial Condition at t = 168
-
CONTENTS xiiiPage
105. Proof of Orthogonality of the J's 169Problems.
. 170
Chapter XVISTRESSES, STRAINS, AND VIBRATIONS OF AN ELASTIC SOLID
Introduction 172106. Stresses, Body and Surface Forces 172107. Examples of Stresses. 174108. The Equation of Motion 175109. Transversa Waves 176110. Longitudinal Waves 178111. General Wave Propagation 179112. Strains and Hooke's Law 180113. Young's Modulus 182
Problems 183
Chapter XVIIFLOW OF FLUIDS
Introduction 185114. Velocity, Flux Density, and Lines of Flow 185115. The Equation of Continuity 186116. Gauss's Theorem 187117. Lines of Flow to Measure Rate of Flow 188118. Irrotational Flow and the Velocity Potential 188119. Euler's Equations of Motion for Ideal Fluids 190120. Irrotational Flow and Bernoulli's Equation 191121. Viscous Fluids 192122. Poiseuille's Law 194
Problems 195
Chapter XVIIIHEAT FLOW
Introduction 197123. Differential Equation of Heat Flow 197124. The Steady Flow of Heat 198125. Flow Vectors in Generalized Coordinates 199126. Gradient in Generalized Coordinates. 200127. Divergence in Generalized Coordinates 200128. Laplacian 201129. Steady Flow of Heat in a Sphere 201130. Spherical Harmonics 202131. Fourier's Method for the Transient Flow of Heat .... 203132. Integral Method for Heat Flow 205
Problems 209
Chapter XIXELECTROSTATICS, GREEN'S THEOREM, AND POTENTIAL
THEORYtntroduction 210
133. The Divergence of the Field . . 210
-
xiv CONTENTSPage
134. The Potential , 211135. Electrostatic Problems without Conductors 212130, Electrostatic Problems with Conductors 215137. Gkeen's Theorem -. 217138. Proof of Solution of Pqisson's Equation . . . 217139. Solution of Poisson's Equation in a Finite Region 220140. Green's Distribution. 221
141. Green's Method of Solving Differential Equations. . . . 222Problems 223
Chapter XXMAGNETIC FIELDS, STOKES'S THEOREM, AND VECTOR
POTENTIALIntroduction 225
142. The Magnetic Field of Currents 226143. Field of a Straight Wire 228144. Stokes's Theorem 229145. The Curl in Curvilinear Coordinates 229146. Applications of Stokes's Theorem 230147. Example: Magnetic Field in a Solenoid 231148. The Vector Potential 231149. The Biot-Savart Law 233
Problems 234
Chapter XXI
ELECTROMAGNETIC INDUCTION AND MAXWELL'SEQUATIONS
Introduction 235
150. The Differential Equation for Electromagnetic Induction 235151. The Displacement Current 236152. Maxwell's Equations 239
153. The Vector and Scalar Potentials 241Problems. 244
Chapter XXII
ENERGY IN THE ELECTROMAGNETIC FIELDIntroduction 246
154. Energy in a Condenser 246155. Energy in the Electric Field 247156. Energy in a Solenoid 248157. Energy Density and Energy Flow 249J 58. Poynteng's Theorem 250159. The Nature of an E.M.F 250160. Examples of Poynting's Vector 251
161. Energy in a Plane Wave . 253162. Plank Waves in Metals 255
Problems 256
-
CONTENTS XV
Chapter XXIII
REFLECTION AND REFRACTION OF ELECTROMAGNETICWAVES Paui,
Introduction 258103, Boundary Conditions at a Surface of Discontinuity. . . . 258164. The Laws of Reflection and Refraction 259165. Reflection Coefficient at Normal Incidence 260166. Fresnel's Equations 202167. The Polarizing Angle 264168. Total Reflection 265169. The Optical Behavior of Metals 267
Problems 268
Chapter XXI
V
ELECTRON THEORY AND DISPERSIONIntroduction 270
170. Polarization and Dielectric Constant 271171. The Relations of P, E, and D 273172. PoLARlZABILITY AND DIELECTRIC CONSTANT OF GaSES 275173. Dispersion in Gases 275174. Dispersion of Solids and Liquids 278175. Dispersion of Metals 280
Problems .- 283
Chapter XXVSPHERICAL ELECTROMAGNETIC WAVES
Introduction. 286
176. Spherical Solutions of the Wave Equation 286177. Scalar Potential for Oscillating Dipole 288178. Vector Potential. 289
179. The Fields. 290180. The Hertz Vector ,..:... 291181. Intensity of Radiation from a Dipole 293182. Scattering of Light 293183. Polarization of Scattered Light 295184. Coherence and Incoherence of Light 295185. Coherence and the Spectrum 298186. Coherence of Different Sources 299
Problems 299
Chapter XXVIHUYGENS' PRINCIPLE AND GREEN'S THEOREM
Introduction 302187. The Retarded Potentials 303188. Mathematical Formulation of Huygens* Principle 305189. Application to Optics 307
190. Integration for a Spherical Surface by Fresnel's Zones 308
-
XVI CONTENTSPage
191. The Use of Huygens' Principle 310192. Huygens' Principle for Diffraction Problems 310193. Qualitative Discussion of Diffraction, Using Fresnel's
Zones 31
1
Problems 314
Chapter XXVIIFRESNEL AND FRAUNHOFER DIFFRACTION
Introduction 31 g194. Comparison of Fresnel and Fraunhofer Diffraction. . . .315195. Fresnel Diffraction from a Slit 319196. Cornu's Spiral 320197. Fraunhofer Diffraction from Rectangular Slit 323198. The Circular Aperture 324199. Resolving Power of a Lens 325200. Diffraction from Several Slits; the Diffraction Grating 326
Problems 328
Chapter XXVIIIWAVES, RAYS, AND WAVE MECHANICS
Introduction 329201. The Quantum Hypothesis 330202. The Statistical Interpretation of Wave Theory 332203. The Uncertainty Principle for Optics 333204. Wave Mechanics 335205. Frequency and Wave Length in Wave Mechanics 337206. Wave Packets and the Uncertainty Principle 337207. Fermat's Principle 339208. The Motion of Particles and the Principle of Least Action 342
Problems. 343
Chapter XXIXSCHRODINGER'S EQUATION IN ONE DIMENSION
Introduction. 345209. Scitrodinger's Equation 345210. One-dimensional Motion in Wave Mechanics 346211. Boundary Conditions in One-dimensional Motion 350212. The Penetration of Barriers 351213. Motion in a Finite Region, and the Quantum Condition . . 353214. Motion in Two or More Finite Regions 355
Problems 356
Chapter XXXTHE CORRESPONDENCE PRINCIPLE AND STATISTICAL
MECHANICSIntroduction 358
215. The Quantum Condition in the Phase Space ....*.... 358216. Angle Variables and the Correspondence Principle,
. . . 359
-
CONTENTS xviiPaojo
217. The Quantum Condition for Several Degrees of Freedom 361218. Classical Statistical Mechanics in the Phase Space .... 364219. Liouvtlle's Theorem 365220. Distributions Independent of Time 366221. The Microcanonical Ensemble 367222. The Canonical Ensemble 368223. The Quantum Theory and the Phase Space 369
Problems. 371
Chapteh XXXI
MATRICESIntroduction. 374
224. Mean Value of a Function of Coordinates 374225. Physical Meaning of Matrix Components 375226. Initial Conditions, and Determination of c's 377227. Mean Values of Functions of Momenta 379228. Schrodinger's Equation Including the Time 381229. Some Theorems Regarding Matrices 382
Problems ... 384
Chapter XXXII
PERTURBATION THEORYIntroduction, 386
230. The Secular Equation of Pertdrbation Theory 386231. The Power Series Solution 387232. Perturbation Theory for Degenerate Systems 390233. The Method of Variation of Constants 391234. External Radiation Field 392235. Einstein's Probability Coefficients 393236. Method of Deriving the Probability Coefficients. .... 395237. Application of Perturbation Theory 396238. Spontaneous Radiation and Coupled Systems 399239. Applications of Coupled Systems to Radioactivity and
Electronic Collisions 402Problems 404
Chapter XXXIII
THE HYDROGEN ATOM AND THE CENTRAL FIELDIntroduction. . . 406
240. The Atom and Its Nucleus 406241. The Structure of Hydrogen 407242. Discussion of the Function of r for Hydrogen 410243. The Angular Momentum 414244. Series and Selection Principles
(
... 416
245. TnE General Central Field 418Problems 423
-
xviii CONTENTS
Chapter XXXIVATOMIC STRUCTURE Paqb
Introduction. . 425246. Tub Periodic Table 42f>247. The Mktitod of Self-consistent Fields 430248. Effective Nuclear Charges 431249. The Many-body Problem in Wave Mechanics 432250. SciirGdinger's Equation and Effective Nuclear Charges, . 433251. Ionization Potentials and One-electron Energies 435
Problems 437
Chapter XXXVINTERATOMIC FORCES AND MOLECULAR STRUCTUREIntroduction 439
252. Ionic Forces 439253. Polarization Force. . 439254. Van der Waals' Force 440255. Penetration or Coulomb Force 442256. Valence Attraction 442257. Atomic Repulsions 444258. Analytical Formulas for Valence and Repulsive Forces. . 444259. Types of Substances: Valence Compounds 447260. Metals 449261. Ionic Compounds 449
Problems 451
Chapter XXXVI
EQUATION OF STATE OF GASESIntroduction. 454
262. Gases, Liquids, and Solids 454263. The Canonical Ensemble 456264. The Free Energy 458265. Properties of Perfect Gases on Classical Theory 461266. Properties of Imperfect Gases on Classical Theory . . . 462267. Van der Waals' Equation 464268. Quantum Statistics 466269. Quantum Theory of the Perfect Gas 468
Problems 470
Chapter XXXVII
NUCLEAR VIBRATIONS IN MOLECULES AND SOLIDSIntroduction 471
270. The Crystal at Absolute Zero 472271. Temperature Vibrations of a Crystal 474272. Equation of State of Solids 478273. Vibrations of Molecules 480
-
CONTENTS xixPage
274. Diatomic Molecules 481275. Specific Heat of Diatomic Molecules 48327G. Polyatomic Molecules ," 485
Problems 486
Chapter XXXVIII
COLLISIONS AND CHEMICAL REACTIONSIntroduction 488
277. Chemical Reactions 488278. Collisions with Electronic Excitation 491279. Electronic and Nuclear Energy in Metals 494280. Perturbation Method for Interaction of Nuclei 497
Problems 499
Chapter XXXIXELECTRONIC INTERACTIONS
Introduction SOI281. The Exclusion Principle 502282. Results of Antisymmetry of Wave Functions ....... 506283. The Electron Spin 507284. Electron Spins and Multiplicity of Levels 509285. Multiplicity and the Exclusion Principle . 510288. Spin Degeneracy for Two Electrons . .512287. Effect of Exclusion Principle and Spin 514
Problems 516
Chapter XL
ELECTRONIC ENERGY OF ATOMS AND MOLECULESIntroduction 518
288. Atomic Energy Levels 518289. Spin and Orbital Degeneracy in Atomic Multiplets .... 520290. Energy Levels of Diatomic Molecules 522291. Heitler and London Method for H 2 523292. The Method of Molecular Orbitals 527
Problems 530
Chapter XLI
FERMI STATISTICS AND METALLIC STRUCTUREIntroduction 531
293. The Exclusion Principle for Free Electrons 531294. Maximum Kinetic Eneroy and Density of Electrons. . . . 534295. The Fermi-Thomas Atomic Model 535296. Electrons in Metals 536297. The Fermi Distrlbution. 540
Problems 543
-
XX CONTENTS
Chapter XLIIDISPERSION, DIELECTRICS, AND MAGNETISM Pagh
Introduction , 545298. Dispersion and Dispersion Electrons 546299. Quantum Theory of Dispersion . 548300. polarizability 549301. Van der Waals' Force 551302. Types of Dielectrics 553303. Theory of Dipole Orientation 554304. Magnetic Substances 556
Problems 558
Suggested References. 561
Index 565
-
INTRODUCTIONTO
THEORETICAL PHYSICSCHAPTER I
POWER SERIES
The first result of a physical experiment is ordinarily a tableof values, one column containing values of an independentvariable, another of a dependent variable. In mechanics, theindependent variable is ordinarily the time, the dependentvariable the displacement. In thermodynamics, we may havetwo independent variables, as volume and temperature, and onedependent variable, the pressure. With electric currents, wemay have the current flowing in some part of the circuit asdependent variable, the electromotive force applied as inde-pendent variable, as when in a vacuum tube we measure platecurrent as function of grid voltage. In electromagnetic theory,the electric or magnetic field strength, the dependent variable,is a function of four independent variables, the three coordinatesof space, and time.The relation between independent and dependent variable can
be given by a table of values, by drawing a graph, or analyticallyby approximating the results by a mathematical formula. Thelast method is by far the most powerful, particularly if furthercalculations must be made using the experimental results, so thatwe are led to the study of mathematical functions. There are agood many well-known functions; for example, the algebraic func-tions, as ax + bx2 ; the trigonometric functions, as sin (ax + 6);exponential functions, as ae-6*; and rarer things like Bessel'sfunctions, Jn (x). It may be that, by inspection of the results,or for some theoretical reason, we may decide that some suchwell-known function can be used to describe our experimentaldata within the experimental error. But in actual physical
1
-
2 INTRODUCTION TO THEORETICAL PHYSICS
problems, we meet many functions which are not included amongthese well-known forms. The question presents itself, can we
' not get some general method of describing functions analytically,equally applicable to familiar and unfamiliar functions?
1. Power Series.Power series present one such generalmethod, on the whole the most useful one. The simplest formof power series is A + A xx + A 2x2 + * , where the A'sare arbitrary coefficients. By giving these coefficients suitablevalues, we can make the series approach any desired functionas closely as we please, with some exceptions as we shall notebelow. As examples of common series, we have first the poly-nomials (in which all A's after a certain n are zero); and thenmany familiar infinite series, as
(1 + x) n = 1 + nx + ^
2|
x + 31 x +
2 3"
' '
(1)
e* - i + a; + |!+|! + . . , (2)COS X = 1 - 7^ + Ti _ ^1 + ' ' * (3)
sin x = x g| + ^j
(4)
In fitting an experimental table of values, it is generally truethat we cannot use one of these well-known series. We mustdetermine coefficients to fit the data. A familiar process is thatin which we know beforehand that the graph of the functionshould be a straight line. Then, either by actually plotting andestimating by means of a ruler, or by using least squares, wefind the two constants of the linear relation y = a + bx. Ifthe graph is slightly curved, we may be able to determine theconstants of a parabola y = a + bx + ex 2 to fit it approximately.More complicated curves can be approximated by taking moreterms. It is plain that, if there are n points determined experi-mentally, we can find a polynomial containing n coefficients whichwill just pass through them. But this is hardly a sportsmanlikething to do, and generally we look for a function containingfar fewer constants than the number of points we wish to -fit.In other words, in practice, rather than using infinite series, we
are accustomed to use only the first few terms of such a series, ,
-
POWER SERIES 3
2. Small Quantities of Various Orders.The general justifica-tion of this method of using only a finite part of a series comesfrom considering small quantities of various orders, as they arecalled. A power series is practically useful only if it convergesrather rapidly; that is, if each term is decidedly smaller than theone before it. If we imagine that a physical relation is reallyexpressed by a rapidly converging infinite series, then the sumof all the terms after a certain one will be smaller than theinevitable errors of experiment, and may be neglected, leavingonly a polynomial. Suppose, for instance, that the linear dimen-sion d of a solid under pressure, expressed as a function of thepressure p, is given exactly by a series d = dQ ap + bp2
. For small pressures, the change of length ap will besmall compared with d , and the second-order term bp 2 will bein turn small compared with ap (though of course this will notbe true for much higher pressures, since ap will increase, andbp2 will increase even more). We express this by saying thatap is small quantity of the first order, bp 2 a small quantity of
the second order. It may well be that the second-order quantitiesare so small that we can neglect them, so that approximately
d = d ap. Now if we are interested in finding the way inwhich the volume, proportional to d 3 , changes with pressure,we have accurately
^3 = dos _ 3do*ap + (Zd a2 + 3d 2b)p 2 + . (5)
But we are assuming that ap is small compared with d , andbp 2 is small compared with ap, for all pressures used. Thus wereadily see that the term in p 2 in this final expression (5) is
small compared with the term in p, and can be neglected incomparison with the leading term d 3 , so that in d3 , as in d, wecan neglect the second order of small quantities. We couldthen have started with the abbreviated expression d = d ap,and have obtained the same result for d3 , to the first order.
This method of cutting off infinite series at definite places,retaining only terms of a certain order, is very commonly used,and often is the only thing that simplifies computations withseries enough to make them practically possible. But we mustnotice that the justification depends entirely on the physicalsituation, and can be different in different cases. Thus if wehad to consider higher pressures in our problem above, we shouldhave to retain the second-order terms, but perhaps could neglect
-
4 INTRODUCTION TO THEORETICAL PHYSICS
third-order ones. One must always use good physical judgmentin neglecting small quantities. Now, of course, in many caseswe do not need to neglect high powers at all. The problemswhich we meet will often have simple enough relations betweenthe coefficients of the successive terms so that we can writedown as many terms as we please, without trouble, as we canwith the binomial or exponential series. But it always paysto inquire, if the high terms of the series get too complicatedto work with successfully, if they cannot be neglected.
3. Taylor's Expansion.We have been speaking of seriesrepresenting functions obtained from experiment, or about whiphwe do not have much information. But it may be that we haveto work with a function whose analytical properties we know,and in that case there is a standard method of finding its seriesexpansion, known as Taylor's theorem. This is as follows:
/(*) =/(o) +f(p)x +^r^2 +-^r*3 +-., W
where f{x) is the function of x, /(0) means the value of the func-tion when x = 0, /'(0) is the first derivative for x = 0, and so on,so that f(x) = A + Aix + A 2x2 +', where A n = fn (0)/nlTo justify this, we need only differentiate n times, obtainingvery easily
/"Or) = n(n - 1) (2)(l)A n + (n + l)(n) (2)A n+1x+ (n + 2)(n + 1) (S)A n+2x* +
= n\A n + ^n
>'A n+1x + .
If now we let x = 0, all terms but the first vanish, so that we have/*(0) = n\ A n , or A n =/(0)/n!.
4. The Binomial Theorem.As an illustration of Taylor'sexpansion, we prove the binomial theorem, the expansion of(1 + x) n given in Eq. (1). We have
f(x) = (1 + *),fix) = nil + x) n~\fix) = nin - 1)(1 + xY~\
etc., by differentiation. Thus, setting x = 0, (1 + x) goes into1, so that we have /(0) = 1, jf'(O) = n, f?(0) = n(n - 1),etc., and A = 1, Ai = n/l\, A 2 = n(n \)/2\, etc.
5. Expansion about an Arbitrary Point.A slightly moregeneral expansion is obtained by shifting the origin along the xaxis to a point a. The expansion is
-
POWER SERIES 5
fix) = f(a) +f{a)(x - 'a) +^p(^ - a) 2 + (7)From Taylor's theorem, we can see immediately a general
condition which a function must satisfy if it can be expandedin power series about a given point (by expanding about a pointwe mean setting up an expansion in powers of x a, if a isthe given point). The function and all its derivatives must befinite at the point in question, since otherwise some coefficients
of the expansion will be infinite. Thus for example we cannotexpand 1/x in power .series in a;: we have/(0) = 1/0 = infinite,and all the derivatives are also infinite. Such a point is calleda singular point of the function. But by expanding aboutanother point we can avoid this difficulty. Thus we can expand1/x about a, if a ^ 0;
/(a) = 1/a, /'(a) = -1/a 2,
/"(a) = 1-2/a3,
/'"(a) =-1-2-3M
etc., so that
1 ' 1_
(x - a),
{x - a) 2_
(x - a) z . .
x a a 2 ^ a 3 a4 "r
"w
From this we can understand that a function can be expanded inpower series about a point which is not a singular point.
6. Expansion about a Pole.At some singular points, thefunction behaves like l/xn
,an inverse power of x. Such a
singularity is called a pole. If fix) has a pole of order n at theorigin, then by definition xnf(x) has no singularity at the origin,and can be expanded in power series A + A\x . Thuswe have for f(x) the expansion
an infinite series starting with inverse powers, but turning intoanordinary series of positive powers after its nth term. A similartheorem holds for expansion about a pole at x a. A singularitywhich is not a pole is called an essential singularity. An exampleof an essential singularity is that possessed by the functione~ 1/x at x = 0. This function approaches as # approachesthrough positive values, but becomes infinite as x approachesthrough negative values, and no inverse power 1/x" has such abehavior.
7. Convergence.A series is said to converge if the process ofadding its terms is one that can be carried out and that leads to a
-
6 INTRODUCTION TO THEORETICAL PHYSICS
definite answer. Thus (1 x)~ l , by the binomial theorem, isequal to 1 + x + x 2 + x 3 + .' Now if x is less than unity,and we try to add these terms, we get an answer. For example,if x = 0.1, we have 1 + 0.1 + 0.01 + 0.001 + 0.0001 + =1.111
,which equals (1 0.1)-1 = 1%, as it should.
But if x is greater than unity, this no longer holds: if x = 2,we have 1 + 2 + 4 + 8+ , which certainly is infinitelygreat, and leads to no definite value. Another situation isobtained if we set x = 1 in the series, when we have 1 1 +1 1 + 1 , a series which is said to oscillate (successiveterms have opposite signs). As a matter of fact, we find thatthe series 1 + x + x 2 + x 3 + , which is called the geometricseries, converges if x is between 1 and +1, but does notconverge if x is equal to or greater than 1, or equal to or lessthan 1. This series illustrates two of the simplest types ofnonconvergence of series, the simple divergence, in which termsget greater and greater, and the oscillation, where the terms havethe same order of magnitude but alternate sign. There is stillanother type of series which does not converge, sometimes calledthe semiconvergent or asymptotic series, whose terms begin todecrease regularly as we go out in the series, but after a certainpoint start in increasing, and eventually become infinite. Theseasymptotic series often can be used for computation, for it canbe shown in many cases that, if we retain terms just up to thesmallest one, the resulting sum is a good approximation to thefunction the series is supposed to represent.Our definition of convergence in the last paragraph was very
crude. More exactly, a series converges if the sum of the first nterms approaches a limit as n increases indefinitely. This defini-tion agrees with the usual procedure of the physicist, for he oftencomputes by series, and he does it by adding a finite number ofterms. He carries this far enough so that adding more termsdoes not change the sum, to the order of accuracy to which heworks, which essentially means that the sum is approachinga limit.
To tell whether a given series converges is not always easy.In the first place, we can be sure in some cases that given Taylor'sexpansions cannot converge if the argument (that is, the inde-pendent variable), has too large a value. Thus 1 + x + x2
does not converge if x is equal to, or greater than, 1, and we couldhave seen this from the fact that the series equals 1/(1 x),
-
POWER SERIES 7
which has a singularity for x = 1 (being equal to %). Thus thefunction is infinite for re = 1, and the series to represent it couldnot converge. And increasing x beyond 1 cannot make the seriesconverge again. In fact, as soon as the variable in a seriesbecomes greater than the value for which the function has asingularity, the series will diverge. But it is a little more com-plicated than this would seem, for 1 + x + x2 + divergesalso for x less than 1, and there is no singularity here. As amatter of fact, a power series converges in general so long as theargument is less in absolute value than the smallest value forwhich there is a singularity, but not beyond. But this singu-larity can come from imaginary or complex values of the argu-ment, so that we might well miss it completely if we did notconsider imaginary values. For this reason, this criterion forconvergence is rather tricky.When we actually examine a series, we can often tell whether
it converges or not. Surely a series cannot converge unless itssuccessive terms get smaller and smaller. We can investigatethis by the ratio test, taking the ratio of the nth term to the onebefore, and seeing how this ratio changes as we go out in the series.If the limiting ratio is less than 1, the series converges; if it isgreater than 1, it diverges. If the ratio is just 1, the test givesno information. Thus for example with the series x + x2/2 +x3/3 + , the ratio of the term in xn to that in xn~ l is
^zj- = x. As n approaches infinity, n 1 and n
tb 00 lb
become approximately equal, so that the ratio approaches x.Thus we see that if z is less numerically than unity, this seriesconverges; if x is greater than unity, it diverges; if x = 1, wecannot say. From other information, we know that the serieswhen x = 1, which is 1 + 1/2 + 1/3 + 1/4 + , diverges.But with the similar series x + x2/2 2 + x s/3 2 + , where theratio of terms also approaches x as we go out in the series, andthe series again diverges for x greater numerically than unity,converges for x less than unity, we have just the other situationat x = 1: the series 1 + 1/22 + 1/3 2 + converges.
Often a series can be approximately summed by comparisonwith an integral. Thus
1 + 2n + 3^ + ' ' "= 2^ =
J^
approximately.
-
8 INTRODUCTION TO THEORETICAL PHYSICS
The approximation is rather poor for the small values of z, butbecomes better for large z values, on which the convergencedepends. It would be a better approximation, for instance, to
write ttt + t^h ' ' = I From this we see that the10n ll n J 10 z
n
series converges when n > 1, the integral being -._ ..^ W-I
which is zero at the upper limit, but diverges if n Z 1. Forn 1, for instance, the integral becomes logarithmically infiniteat z = oo
.
Problems
1. Plot 1 as a function of x, and show that it has a minimum atx a, 2
x = 2. Expand in Taylor's series about this point, obtaining an expansiony = A + Az(x 2) 2 + A s (x 2) 3 + , where necessarily the coeffi-cient A-l is zero. Now plot on the graph the successive approximationsy = A
,y = A + A 2 (x - 2) 2
,y = A + A 2 (x - 2) 2 + A,(x - 2) 3 , y =
A + A 2 (x 2) 2 + A 3 (x 2) 3 + A 4 (x 2) 4, observing how they approxi-mate the real curve more and more accurately.
2. a. Derive the series for the exponential, cosine and sine series, directlyfrom Taylor's theorem.
6. Differentiate the series for sin x term by term, and show that theresult is the series for cos x.
3. In the series for ex,set x = 1, obtaining a series for e. Using this series,
compute the value of e to four decimal places.4. Why does one always have series for In (1 + x) in powers of x, rather
than for In x? From the series for In (1 + x), compute logarithms tobase e of 1.1, 1.2, 1.3, 1.4, 1.5.
6. The function l/(x i), where i = \/ 1> has a singularity for x = i,but not for any real value of x. Show that nevertheless the series expansionabout x = diverges for x greater than 1 or less than 1, obtaining thepower series by Taylor's theorem, and separating real and imaginary partsof the series. This is an example of a case where the series diverges onaccount of singularities for complex values of x.
6. As a result of an experiment, we are given the table of values following:
x V1 7.02 11.13 15.24 19.35 23.26 27.17 30.88 34.59 38.210 41.7
-
POWER SERIES 9
Try to devise some practicable scheme for telling whether this function (inwhich, being a result of experiment, the values are only approximations),can be represented within the error of experiment by a linear, quadratic,cubic, etc., polynomial. Get the coefficients of the resulting series, and usethem to find the value of the function and its slope at x = 0. Plot thepoints, the curve which approximates them, and the straight-line tangent tothe curve at x = 0. It is legitimate to use graphical methods if you wish.
7. Expand tan-1 a; in a power series about x = 0. Hints:
(a) -j- tan" 1 (x) =dx v ' 1 + x%
w r^-2 = 1 ~ x* + xi - ** +
t- (tan-1 x) dx = tan-1 x + c./;
What is the range of convergence of the resulting series? Calculate fromthis series the value of tt/4 = tan-1 1 correct to 5 per cent. How many termsof the series are necessary to obtain this accuracy?
8. By a procedure analogous to that used in Prob. 7 expand sin-1 sin apower series about x 0. Find the range of convergence for this series.
9. From the known Taylor's series for ex,write the corresponding series
for e~ 2. By integrating this series obtain to 1 per cent a value for
,oe~
x2dx>
whose correct value is 0.748. ...10. Make use of the binomial theorem to obtain an expansion of
VI + -y/x in ascending powers of xV*. What is the range of convergence?11. Discuss by the ratio test the convergence of the following series:
(a.) x + x*/2 + x3/3 + xV4 + (6) x + x72 2 + a;V3 2 + x*/4* + (c) The binomial expansion of (1 + x)k, for nonintegral k.(d) The series for ex
,sin x, cos x.
s:
-
CHAPTER II
POWER SERIES METHOD FOR DIFFERENTIALEQUATIONS
Most important physical laws involve statements giving therelation between the rate of change of some quantity and otherquantities. Such a relation, stated in mathematical language,is a differential equationan equation containing derivatives offunctions, as well as the functions themselves. For example,the fundamental law of mechanics is Newton's second law ofmotion: the force equals the time rate of change of themomentum. Or in electricity, in a circuit containing aninductance, the back electromotive force of the inductance equalsa constant times the time rate of change of the current. Butthese differential relations are not in the form which can be usedin making direct connection with experiment. One cannotdirectly plot graphs, or give tables of values, from them. Onemust rather solve the differential equations, that is, find algebraicrelations between the variables, containing no differentiations,but consistent with the differential equations. For most of ourcourse we shall be interested in finding such solutions of differen-tial equations.
Solving differential equations is rather like integrating func-tions: there are no general rules. Individual cases must betreated by appropriate special methods. We shall meet somesuch special rules, and shall make much use of some of them.Those who have studied differential equations have learned avariety of such rules. But rather more important on the wholeis a method which is applicable, though not always most con-venient, in a very large number of cases: the method of powerseries. In general, the solution of a differential equation consistsof a certain functional relation between variables. If we assumethat this function is expanded in power series, our only problemis to determine the coefficients. And by substituting the seriesback into the differential equation, we can very often get condi-tions for determining them. We shall illustrate the methodby examples.
10
-
POWER SERIES METHOD FOR DIFFERENTIAL EQUATIONS 118. The Falling Body.Imagine a body moving vertically
under the action#of gravity. To describe its motion, we have an
independent variable, the time t, and a dependent variable, theheight x. Let the mass of the body be m, and let its velocity,which is of course dx/dt, be also called v. The force acting on
it is F. Then Newton's law states that F = \, J > where mvdt
is the momentum. If the mass is constant (which does notalways have to be the case, as we shall see in Prob. 7), we canrewrite the equation as F = mdv/dt, or =ma, where a is theacceleration. Substituting v = dx/dt, this is also F = md2x/dt2 .These are all forms of Newton's second law, written as differentialequations. We shall first take the case where the force, likethat of gravity on the earth's surface, is constant :F = constant = mg, where g is the acceleration of gravity, and where the nega-tive sign means that the force is downward. Then we have
t? dv d2x ...F=-mg = m
m= m^, (1)
or d2x/dt2 = dv/dt = g. These can be solved at once, by directintegration: integrating once with respect to t, dx/dt = v =constant gt = v gt, where y , the constant of integration,obviously means the value of the velocity when t = 0. Integrat-ing again, and calling the second constant of integration x
,we
have x = x + v t \gt2 , containing now two arbitrary con-stants, the initial position and initial velocity. The presenceof such arbitrary constants is the most characteristic feature ofthe solutions of differential equations. And we note that thenumber of arbitrary constants equals the number of integrationswe must perform to get rid of the differentiations. If the dif-ferential equation is one of the first order (with only first deriva-tives in it), there will be one arbitrary constant in the solution;if it is of the second order (second derivatives), there will be two,and so on. And always the arbitrary constants must be deter-mined so as to satisfy certain "initial conditions," such as thevalues of the position and velocity at t = 0.
9. Falling Body with Viscosity.With the problem of thefalling body, the solution has automatically come out as a poly-nomial in t, which is simply a power series that breaks off, sothat there is no need of more complicated methods. But nowlet us take a more difficult case: we assume the body to be falling
-
12 INTRODUCTION TO THEORETICAL PHYSICS
through a viscous medium under the action of gravity. Herethe force is a sum of two parts: gravity, mg,
%and a frictional
force depending on velocity. It is found experimentally thatfor small velocities this frictional force, in a viscous medium, isproportional to the velocity, with, of course, a negative coeffi-cient, since it opposes the motion, changing signs with the velocity.Let it be called kv, k being the coefficient, which depends in acomplicated way on the shape and size of the body, and is pro-portional to the coefficient of viscosity of the fluid. Then wehave
dv 7m-j = mg kv,
or
m-j + kv = mg. (2)
This is a simple sort of differential equation, in a standard form.It is
1. A linear differential equation. That is, it contains v and itsderivatives (as v, dv/dt, d2v/dt 2 , etc.) only in the first power (in
dv/dt, kv), or the zero power ( mg, independent of v), not assquares or cubes [as, for example, (dv/dt) 2}, or products (as v
dv/dt).2. A differential equation of the first order (containing no
derivative higher than the first).3. An inhomogeneous equation (it contains terms of both the
first power and the zero power in v and its derivatives, while ahomogeneous equation contains only terms of tlie same power,as all of the first power. That is, if the term mg were absent,the equation would be homogeneous).We cannot solve Eq. (2) by direct integration, for if we inte-
grate with respect to t, one term would be jv dt, which we cannotevaluate, since v is an unknown function of time. Thus we mustproceed differently. Let us assume that v is given by a powerseries in the time* v = A + Ait -\- , and try to determinethe coefficients. We do this by substituting the series in theequation. We have by direct differentiation
^ = A t + 2A 2t + 3A 3*2 ++( + l)A n+ltn '+.Then, substituting, we have
m[Ai + 2A 2t + 3A st2 + + (n + l)A n+ltn + J+ k(A + Ait + AJ* +'+ Ajn +) = m-
-
POWER SERIES METHOD FOR DIFFERENTIAL EQUATIONS 13Rearranging,
(A: + A + g) + (2A 2 + A x)t +
+ \{n + l)A n+l + ^A n\ + = 0. (3)
This states that a certain power series in t is equal to* zero, for allvalues of t. But the only function of t which is always zero iszero itself, and by Taylor's theorem the expansion of zero inpower series is a series all of whose coefficients are zero. ThusEq. (3) can only be satisfied, for all values of t, if each coefficientvanishes
:
k
2A 2 + -A x = (4)
(n + 1)A+1 + ^-A n =m
Here we have an infinite set of equations to solve for the coeffi-cients A. Fortunately they are so arranged that we can solvethem, getting all A'b in terms of A
,if we start with the first and
work down:
4,=
& Ik. lk/k A , \
^Ao + g
)
(5)
A _ _lh 1 k*/kAs " 3mA * ~ ~Z\lAm
A n+1 = - * -A. = (-1)*+* ] ,(-Ao + g\(n + 1) m v ' {n + V)\mn\m y JAnd the power series is
v = A + A xt +
-^ + (^' + X- ( + 5=,
-S!^+- : -> (6)Thus we have the solution. If we set t = 0, we have v = A
,so
that A is simply the initial velocity, and is the arbitrary constant
-
14 INTRODUCTION TO THEORETICAL PHYSICS
which we meet in the solution. We could compute from ourseries the value of v at any time t, knowing the initial velocity.
It happens in this case that we can recognize the infinite seriesas representing a familiar function. For we have
k.,
1 fc2 1 ks--Z4m
e = 1 -m 2 ! ra2 3 ! w 3
which has close connection with our series, so that we can writeat once
v = A + lAo + g(-Ao + g)(e"='-l)
m
mg
k/m
-(A. +%y* mgk ' (7)
mg
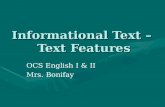
Fig. 1.Velocity of damped falling body, with various initial conditions.
We Can see the physical properties of the solution most clearlyfrom the graph in Fig. 1, No matter what the initial velocitymay have been, the particle finally settles down to motion with aconstant speed, given by mg/k. The initial velocity is A , andif this is greater than the final velocity, the body slows down; ifit is less, it speeds up, to attain this final speed.
10. Particular and General Solutions for Falling Body withViscosity.It is instructive to notice that we can solve our
-
POWER SERIES METHOD FOR DIFFERENTIAL EQUATIONS 15
problem in an elementary way. Our equation is mdv/dt + kv = trig. Plainly a particular solution is given by assuming aconstant velocity. Then dv/dt is zero, so that the equation iskv = rag, or = mg/k. But this is not the most generalsolution, for it does not have an arbitrary constant; it representsmerely the particular case in which the initial velocity happenedto be just the correct final value, and is unable to describe anyother initial condition. To get a general solution, we proceed asfollows: we take the homogeneous equation mdv/dt + kv = 0,which we obtain from our inhomogeneous equation by leavingout the term mg. We can easily solve this: writing it dv/v = (k/m)dt, and integrating, we have In v = (k/m)t + con-stant, and taking the exponential, v = constant X e~(k/m) ', wherethe constant is arbitrary. Then the sum of this general solutionof the homogeneous equation, and the particular solution (m/k)gof the inhomogeneous equation, is the solution we desire. Wemay prove this easily. For we have
\mJt+ fcjw 6"* / = -
Adding,
showing that the function Ce~{k/m)t (m/k)g satisfies the differ-ential Eq. (2).The procedure we have just used is an illustration of the general
rule : A general solution of an inhomogeneous equation is obtainedby adding a particular solution of the inhomogeneous equation,and a general solution of the related homogeneous equation. In thisstatement, the terms "particular solution" and "general solu-tion" are used in a technical sense: a "particular solution" isone which satisfies the differential equation but has no arbitraryconstants; a "general solution" is one which has its full comple-ment of arbitrary constants. The proof of the rule in general iscarried out just as in our case, adding the particular solution ofthe inhomogeneous equation and a general solution of the homo-geneous equation, and showing that the sum satisfies the inhomo-geneous equation. One thing should be noted: the propertieswe have been discussing depend entirely on the linear character
-
16 INTRODUCTION TO THEORETICAL PHYSICS
of the differential equation, for it is only with linear functions
/ that /(xi) + f(x 2) = f(xi + x2).11. Electric Circuit Containing Resistance and Inductance.
The theory of the electrical circuit reminds one in many ways ofmechanical principles: electric current is analogous to velocity,charge to displacement, electromotive force to mechanical force.Thus in a circuit containing a resistance, inductance, and con-denser, all in series, the current can flow through the circuit,
piling up in the condenser because it cannot flow through. Let
q be the charge on one plate of the condenser ( q being the charge
on the other), and let i be the current flowing through the circuittoward the condenser plate in question, so that the currentmeasures just the amount of charge per second flowing onto thecondenser plate, or i = dq/dt (as v = dx/dt). Now let thecoefficient of self-induction of the circuit be L, the resistance R,
the capacity of the condenser C. Then there are three e.m.fs.(electromotive forces) acting on the current, in addition to apossible external e.m.f. E from a battery: the back e.m.fs. of
diinduction, resistance, and capacity. The first is L-jg the
electromotive force induced in a circuit when the current changes;the second is Ri, the value familiar from Ohm's law; the thirdis q/C, as given by the elementary law of the condenser.These are all negative, for they act to oppose the current. Nowthe law of the circuit is that the total e.m.f. acting on the circuit
is zero:
-Lf-tt- + *-0,or
T'Jt ^
"'' CL
d4t + Ri + =E. (8)
This is a differential equation. Let us take the special case wherethere is no condenser, so that the equation is Ldi/dt + Ri = E.The equation is then exactly analogous to the equation mdv/dt +kv = F, which we had for a falling body with viscosity. And wesee that self-induction is analogous to inertia, resistance to
viscosity. The analogy is often valuable.If now the applied e.m.f. E of the battery is constant, the
problem can be solved mathematically just as before, and we findi = constant X e~(B/L)t + E/R. The first term is the transient
-
POWER SERIES METHOD FOR DIFFERENTIAL EQUATIONS 17
effect, of arbitrary size, as we see from the arbitrary constant,rapidly dying out as time goes on, while the second is the constantvalue given by Ohm's law, the value to which the current tendsif we wait long enough. "
Problems
1. Show that the solution v = (A + mp/fc)e-(*/m) ' .mg/k reducesproperly to uniformly accelerated motion in the limiting case where theviscous resistance vanishes. Illustrate this graphically, showing curves forseveral different k's, and finally for k = 0, all with the same initial velocity.
2. A raindrop weighs 0.1 gm., and after falling from rest reaches a limitingspeed of 1,000 cm. per second by the time it reaches the earth. How longdid it take to reach half its final speed? Nine tenths of its final speed?How far did it travel before reaching half its final speed? For how longcould its velocity be described by the simple law v = gt to an error of1 per cent?
3. At high velocities, the viscous resistance is proportional to the thirdpower of the velocity. Assuming this law, set up the differential equationfor a particle falling under gravity and acted on by such a viscous drag.Solve by power series, obtaining at least four terms in the expansion for vas a function of t. Draw graphs of velocity as function of time, and discussthe solutions physically.
4. Using the same law of viscosity as in the preceding problem, but assum-ing no gravitational force, solve by direct integration of the differentialequation for the case of a particle starting with given initial velocity andbeing damped down to rest. Show by Taylor's expansion of this functionthat it agrees with the special case of the power series of the precedingproblem obtained by letting the gravitational force be zero.
6. A large coil has a resistance of 0.7 ohm, inductance of 5 henries. Untilt = 0, no current is flowing in the coil. At that moment, a battery of 5volts e.m.f. is connected to it. After 5 sec, the battery is short-circuitedand the current in the coil allowed to die down. Compute the current asfunction of the time, drawing a curve to represent it.
6. A coil having L = 10 henries. R = 1 ohm, has no current flowing init until t = 0. Then it has an applied voltage increasing linearly with thetime, from zero at t = 0, to 1 volt at t = 1 sec. After t = 1, the e.m.f.remains equal to 1 volt. By series methods find the current at any time,and plot the curve. '
7. Suppose we have a rocket, shot off with initial velocity v,and there-
after losing mass according to the law m = m (l ct), where m is the massat any time, m the initial mass at t = 0, c is a constant, and where the masslost does not have appreciable velocity after it leaves the rocket. Showthat on account of the loss of mass the rocket is accelerated, just as if a forcewere acting on a body of constant mass. The rocket is acted on by a viscousresisting force in addition. Taking account of these forces, find the differ-ential equation for its velocity as a function of time, and integrate the equa-tion directly. Now find also the solution for v as a power series in the time.Show that the resulting series agrees with that obtained by expanding the
-
18 INTRODUCTION TO THEORETICAL PHYSICS
exact solution. Calculate the limiting ratio of successive terms in the
power series, as we go out in the series, and from this result obtain the region
of convergence of the series. Is this result reasonable physically? Whathappens in the exact solution outside the range of convergence?
8. In a radioactive disintegration, the number of atoms disintegrating persecond, and turning into atoms of another sort, is simply proportional to the
total number of radioactive atoms present. Write down the differentialequation for the number of atoms present at any time, and find its solution.Assuming that half the atoms of a sample of radium disintegrate in 1,300years, how many would decay in the first year?
9. If at the same time radium were being produced at a constant rate bydisintegration of uranium, how would this change the situation in thepreceding problem? Set up the new differential equation. Assuming
that we start without any radium, but with pure uranium, find the amount
of radium as a function of the time. Show that the amount of radiumapproaches an equilibrium amount, which it reaches in time, whether the
initial amount of radium is greater or less than the equilibrium amount.
10. Find a series solution for the differential equation m dv/dt + kv = c/t,
where c is a constant, representing a damped motion under the action of anexternal force which decreases inversely proportionally to the time, the
series having the form v = on/t + a/t* + . Show that this series isdivergent for all values of t. Show that the differential equation is formally
satisfied by the expression v = er*J ^~dt. This solution is convergent for t
negative. The integral | j dt is known as the exponential integral func-tion, and is important in physics and mathematics. It is frequently calcu-
lated by using the above divergent series. Explain how this procedure mightbe valid.
11. Suppose a particle is acted on by a damping force proportional to the
velocity, and to a force which varies sinusoidally with the time. Solve the
resulting differential equation for velocity as function of time, by the series
method, by expanding the force in power series in the time. Can you
recognize the analytical form of the resulting power series?d2v 1 dtf
12. Solve by power series Bessel's equation ^ + -^ + y =0. The
result is Bessel's function of the zero order, Jo 0c). From the series, plot
J (x) for x between and 5.
13. The equation for Bessel's function of the mth order, Jm{x), is^ +
i dy. + (\ _ 2V = 0. Solve by power series, showing that the first
x dx \ x 2 Jterm in the expansion is that in xm . Plot Ji(x) for x between and 5.
Bessel's functions oscillate, like the sine and cosine, all the way to infinity.
We shall use them in discussing standing waves in a circular membrane, andfor many other problems. The second independent solution of the equation
is infinite at the origin, and hence cannot be expanded in power series.
-
CHAPTER IIIPOWER SERIES AND EXPONENTIAL METHODS FOR
SIMPLE HARMONIC VIBRATIONSIn the last chapter we have found a general method of power
series for solving differential equations, and have applied it tothe problem of motion under viscous forces. Next we considerthe same method, applied to somewhat different problems: aparticle acted on by restoring forces proportional to the distance,or an electric circuit containing inductance and capacity.
12. Particle with Linear Restoring Force.Suppose that theforce acting on a particle is proportional to the displacementfrom a fixed position, and opposite to the displacement, a so-calledlinear restoring force. This force is -kx, if x is the displace-ment, k a constant. For the moment we assume that there isno gravitational or other external force acting. Then the equa-tion of motion is md2x/dt2 = kx, or
mdfi + kx
= (1)
This is a homogeneous linear differential equation of the secondorder, with constant coefficients (that is, m, k are independentof time). We solve it in series as before. If x = A + Ait +A 2t2 + , we have immediately, by the method used before,(2mA 2 + kAo) + (3 2mA 3 + kA x)t + (4 SmA* + kA 2)t2 +
=0.Thus, setting the separate coefficients equal to zero, and solvingone equation after the other, we find
a1Jc A a 1 * AA2 =
-2mAo > As =-3lmAl>
(2)
These equations determine all the coefficients in terms of twoarbitrary ones, A and Ai, which are the two arbitrary constants
19
-
20 INTRODUCTION TO THEORETICAL PHYSICS
to be expected in the solution of a second-order differential
equation. The solution may be written
x = A
-
POWER SERIES AND EXPONENTIAL METHODS 21
-A Vl/LC sin Vl/LC t + A x cos Vl/LC t, so that theoscillations of charge and current are similar. The period ofoscillation is given by T = 2w\/LC, increasing as either theinductance or the capacity becomes large.
14. The Exponential Method of Solution.We have foundthat the solutions of our vibration problems, as well as of severalother differential equations, come out either as exponentialfunctions, or as sines or cosines. As a matter of fact, anyhomogeneous linear differential equation, with constant coeffi-cients, has such solutions. On account of the importance ofthis type of equation, we shall consider its solution specially.Let us take a second-order differential equation,
g + g+*-. (7)a type which includes the mechanical and electrical problemswe have worked with. We can show very easily that this hasan exponential solution, y = ekx . For let us substitute thisfunction into the equation. We have dy/dx = ky, d2y/dx2 =k2y, so that the equation becomes (k2 + ak + b)ekx = 0. Thisequation is factored, and since ekx is not always zero, the otherfactor must be, and we have k2 + ak + 6 = 0, or solving thequadratic by formula, k = -a/2 Via/2) 2 - &. Thus if kequals either k x = -a/2 + V(/2) 2 - b, or k2 = a/2 V(a/2) 2 b, ekx is a solution of the equation. We have, infact, two independent solutions.Now if we have two independent solutions of a second-order
linear homogeneous differential equation, we can readily show thatany linear combination of them is itself a solution. If such asolution has two arbitrary constants, it is a general solution. Thuswe can write the general solution of Eq. (7)
y = AeklX + Bek*x,
or
y = e-(a/2)s[_4 ev/(/2)*-&s
_|_ e-V(/2) *-&*]. (8)This is the solution, with its two arbitrary constants, and itmight seem as if no further discussion were necessary. Butthere is an interesting feature still to consider: the quantity(a/2) 2
6 under the radical may easily be negative, and thesquare root imaginary, so that we have to investigate theexponentials of imaginary quantities.
-
22 INTRODUCTION TO THEORETICAL PHYSICS
Suppose, for example, that the damping term is zero: a = 0,and the differential equation is d 2y/dx2 + by = 0. This is theonly case we have so far worked out in detail. Then the solution
becomes y = Ae*^1* + Be'*^1*, where i = yf^l. But wehave already seen that the solution of this same equation is Ccos y/bx + D sin y/bx. If both forms are right, there mustbe connections between exponential and sinusoidal functions,which we now proceed to investigate.
15. Complex Exponentials.Let us investigate the functioneix by series methods. We have at once
e,x- 1 + tx - 2]
_
Iff"+~
41*
"
-(l-*+t---) + i ('-a + --;)
or
eix = cos x -\- i sin x.
Similarly we have
e-ix
_ cos x i sin x. (9)
We can solve for cos x by adding these equations and dividingby 2, or for sin x by subtracting and dividing by 2r.
eix
_|_ e-ix ^ eix _ g-XXcos a; = H sin a; = ^ (10)
These theorems are fundamental in the study of exponentialand sinusoidal functions.
In terms of the formulas of the last paragraph, we can readily
see that our two formulations of simple harmonic motion areboth correct. For we have
= A (cos y/bx + i sin y/bx) + B (cos y/bx i sin y/bx)= (A + B) cos y/bx + i(A B) sin y/bx,
or one constant times the cosine plus another times the sine,
which is the more familiar solution. By giving A and B suitablecomplex values, we can have both coefficients real. But toknow how to do this, and to understand the whole process, weshould study complex numbers for themselves. Let us thenmake a little survey of the theory of complex numbers.
-
POWER SERIES AND EXPONENTIAL METHODS "23
/ /
&/ /x /
0^^*
16. Complex Numbers.A complex number is usually writtenA + Bi, where A and B are real, i = s/ 1. It is often plottedin a diagram: we let abscissas represent real parts of numbers,ordinates the imaginary parts, so that A measures the abscissa,B the ordinate, of the point representing A + Bi. Every pointin the plane corresponds to a complex number, and vice versa.All real numbers lie along the axis of abscissas, all pure imagi-naries along the axis of ordinates, and the other complex numbersbetween. But it is also often convenient to think of a complexnumber as being represented, notmerely by a point, but by thevector from the origin out to thepoint. The fundamental reasonfor this is that these vectors obeythe parallelogram law of addition,just as force or velocity vectors do(see Fig. 2). The vector treat-ment is suggestive in many ways.For example, we can consider theangle between two Complex num-bers. Thus, any real number, andany pure imaginary number, areat an angle of 90 deg. to eachother. Or, the number 1 -+ i is atan angle of 45 deg. with either 1or i. When a complex number is regarded as a vector, we candescribe it by two quantities: the absolute magnitude of thevector, or its length, \/A 2 + B 2 ; and the angle which it makeswith the real axis, or tan-1 B/A.The vector representation of complex numbers has very close
connection with complex exponential functions. Let us considerthe complex number eie
,where is a real quantity. As we have
seen, this equals cos + i sin 0, so that the real part is cos 0,the imaginary part sin 0. The vector representing this numberis then a vector of unit magnitude, for V cos2 + sin2 = 1.Further, it makes just the angle with the real axis. We causee interesting special cases. The number e' 2 = i, as we cansee at once from the vector diagram, or from the fact that it
3 C A EFig. 2.Law of addition of com-
plex vectors. The vector E + Firepresents the vector sum of A + Biand C + Di. Evidently OE =OA + AE = OA + OC, and OF =OB + OD. Hence E + Fi =(A + O + (B + D)i.
,2-ri equals cos t/2 + i sin x/2 = i. Similarly e" = 1, e* = 1. This Jast result shows that the exponentiale 4*i =
-
24 INTRODUCTION TO THEORETICAL PHYSICS
function of an imaginary argument is periodic with period 2iri,similarly to the sine and cosine of a real argument.Next we look at the number rei0 , where r, 6 are both real. It
differs from eie in that both real and imaginary parts are multi-plied by the same real factor r, which simply increases the lengthof the vector to r, without changing the angle. Thus reie is avector of length r, angle 0. As a result, we can easily write any
complex number in complex exponential form: A + Bi = reie,
where r = VA 2 + B 2, 6 =tsar 1 B/A, or A = r cos 6,B =r sin (see Fig. 3). We mayuse these results in showingwhat happens when two com-plex numbers are multipliedtogether. Suppose we wish toform the product (A + Bi)(C
-f Di) . Of course, multiply-ing directly, this equals (AC BD) + (AD + BC)i, so that wecan easily find real and imagi-nary parts of the product, butthis is not very informing. It
is better to write A-J- Bi =
r xeie\ C + Di = r2eie\ Then
the product is (rxeiei)(r%ei6i) =
(ri/-2)ei(01+e2) . That is, the mag-nitude of the product of twocomplex numbers is the productof the magnitudes, and theangle is the sum of their angles.
Suppose we have a complex number reie , and consider theclosely related number re~ie . The second is called the conjugateof the first. If we have a complex number in the form A -f Bi,its conjugate is A Bi. Or in general, if we change the signof i wherever it appears in a complex number, we obtain its
conjugate. Graphically, the vector representing the conjugateof a number is the mirror image of the vector representing thenumber itself, in the axis of real numbers. Now conjugatenumbers have two important properties: the sum of a numberand its conjugate is real (for the imaginary parts just cancel intaking this sum), and the product is real (for this equals
Fig.A=rcos0 A
-The complex number P equalseither A + Bi, or re %e .
-
POWER SERIES AND EXPONENTIAL METHODS 25
r2ei(e-6) = r2) The second fact is useful in finding the absolute
magnitude of a complex number: if z is complex, z its conjugate(this is the usual notation), then -y/zi equals the absolutemagnitude of z. From the other fact, we may find the real and
i- % -I 5
imaginary parts of complex numbers: ^ equals the real part
z zof z, and as we can easily show, ~. equals the imaginary
part. We see examples in our relations between sinusoidal andexponential functions where e~ix is the conjugate of eix
,so that
gix_|_ aix-2 should, and does, equal the real part of eix
,or cos x,
oix ff~i-x
and ~-. equals the imaginary part, or sin x.
17. Application of Complex Numbers to Vibration Problems.There are two different, though related, ways of applying com-plex numbers to vibration problems. The first, and perhapsmore logical, is directly suggested by what we have done. Wefound for undamped vibrations that y = Aeiy/~hx + Be~i^x .Now naturally we wish y to be real, since it represents a realdisplacement. To do this, we make use of the proposition thatwe have just found, that the sum of a complex number and itsconjugate is real. Since e^V*"* is the conjugate of e1^", weachieve the desired result if we make B = A, for then the wholesecond term is just the conjugate of the first. Incidentally,
Cif we write A = -= e~ia
,we have
y = -ei(Vb*-cc) _|_ ^(Vfrs-oO = C cog (y/bx _ a)> (U)
giving a form, in terms of amplitude C and phase a, which isoften useful and important.The second method of treatment is more common, particularly
in electrical applications. Suppose we work directly with thecomplex solution y = Aei^/hx, but consider that only the realpart is of physical significance. This real part, as we haveseen, is half the sum of this quantity and its conjugate, so that,except for a factor of 2, it comes to the same thing we haveconsidered before. However, it is often easier to think of it inthis way, and the process of using a complex solution, and finallytaking the real part, is very common. Of course, if A is real,
-
26 INTRODUCTION TO THEORETICAL PHYSICS
the real part is simply A cos y/bx; if A is complex, we may writeit Ce-**, and the real part of the product is C cos {\/bx a).This second method is particularly interesting in discussing simpleharmonic motion, where x is replaced by t, and y/b by to, sothat we are considering the real part of Ae*. The complexnumber is given by a vector of length A, rotating in the complexplane with angular velocity w. And its real part is simply theprojection of the vector along the real axis. Thus it correspondsexactly to the most elementary formulation of simple harmonic
motion, as the projection of a circular motion on a diameter.
Problems
1. Show directly that the solution A sin at + B cos at for the particlemoving with simple harmonic motion can also be written C cos (at - a).
Find C and a. as functions of A and B, and vice versa. The constant C iscalled the amplitude of the motion, and a is called the phase. Note that a
can be regarded as an angle, measured in radians.
2. A pendulum 1 m. long is held at an angle of 1 deg. to the vertical,and released with an initial velocity of 5 cm. per second toward the position
of equilibrium. Find amplitude and phase of the resulting motion.
3. A circuit contains resistance, inductance, and capacity, but there is noimpressed e.m.f. Solve the differential equation in series, and show by
comparison of the first few terms that the series represents the function
e-iR/iDt(A sin wt + B cos at), where a2 = 1/LC R 2/4JL 2 .4. In an oscillatory circuit, show that the phases of the charge and the
current differ by 90 deg.5. Given a complex number' represented by a vector, what is the nature
of the vector representing its square root; its cube root? Find the three
cube roots of unity, the four fourth roots, the five fifth roots, plotting them
in the complex plane, and giving real and imaginary components of each.
With one of the cube roots, in terms of its real and imaginary parts, cube by
direct multiplication and show that the result is unity.
6. Find real and imaginary parts of V3~+5t, jT+lBi y/A + Bi^^
A, B are real..
7. Show that In (-a) = id + In a, or &rt + In a, or m general nm +In a, where n is an odd integer.
8. Prove that if we have a complex solution of the problem of a vibrating
particle, the real part of this complex function is itself a solution of the
problem.,
9. Show that in general a linear homogeneous differential equation of the
nth order with constant coefficients has n independent exponential solutions
of the sort we have considered.. 10. Show that if we have n independent solutions of an nth order differen-
tial equation, then an arbitrary linear combination of these solutions,con-
taining n coefficients, is a general solution of the equation.
-
CHAPTER IV
DAMPED VIBRATIONS, FORCED VIBRATIONS, ANDRESONANCE
We have now reached the point where we can discuss a widerange of prbblems in oscillatory mechanical or electrical systems.The general question we shall take up is that of a system con-taining inertia, damping force proportional to the velocity, andrestoring foroe proportional to the displacement, under theaction of an impressed force. This leads to an inhomogeneoussecond-order linear differential equation, of the form
m|f + 2mk
-
28 INTRODUCTION TO THEORETICAL PHYSICS
2 > 0. The first is the case where the damping is small. Herey/k2 o> 2 = i\/oi 2 k 2
,and the radical is real. Then we have
the same sort of expression we have considered before, and toget a real answer we must write B = A, or else we can take thereal part of a complex quantity. Let us do the latter: the solu-tion is the real part of Ae^e 1*^" 2-^1
,or is Ce~kt cos (a/ 2 k 2 t
a). This is like a simple harmonic motion, of angular velocity\Ao 2 A; 2
,
phase a, but with an amplitude Ce~kt which continuallydecreases with time, and it is called damped simple harmonicmotion. For snjall damping, the angular velocity can be
k 2expanded in power series, and is
-
DAMPED VIBRATIONS AND FORCED VIBRATIONS 29
The solution isq = ce-(*/2i>< CoS (ut - a), (4)
where
co = Vl/LC - R2/AL2 .This is the same solution which we found in Prob. 3 of the last
chapter by the series method. It is an interesting illustrationof the simplicity of the exponential method of solving the equa-tion. As we see, the current oscillates with an angular velocitywhich, for small R, differs only slightly from the undampedangular velocity \/l/LC, but it has a logarithmic damping,which is greater the greater R is.
20. Initial Conditions for Transients.To fix the two arbitraryconstants of the transient, we must fit the initial displacementand velocity. Thus, for instance, consider the solution in theform
x = Ce~kt cos (Vw2 - k2 1 - a).Assume that at t = 0, x = z n , and dx/dt = v . From the first,
Xo = C cos a. (5)
To apply the second, we have
^ = -Ce-ktV 2 - k 2 1 - a)
-kCe~kt cos (V 2 - k2 t - a).Thus
Vo = Cy/o> 2 k 2 sin a kC cos a. (6)
By simultaneous solution of Eqs. (5) and (6) we can find Cand a in terms of x and v .
21. Forced Vibrations and Resonance.Our next task is tofind a particular solution of Eq. (1) containing the externalapplied force. To do this, we shall first solve the case wherethe force is a sinusoidal function of the time, a very importantspecial case. This leads to* a solution also sinusoidal with thesame frequency, with an amplitude proportional to the amplitudeof the force, but for which the constant of proportionality dependson the frequency, becoming large out of all proportion if theimpressed frequency is nearly equal to the natural frequency.This phenomenon of enormously exaggerated response of the
-
30 INTRODUCTION TO THEORETICAL PHYSICS
oscillating system to a certain impressed frequency is calledresonance; it is of great physical importance.
Familiar examples of resonance will occur to one. Inmechanics, it is well known that a pendulum can be set swing-ing with large oscillations if it receives small periodic impulses,timed to synchronize with its own period, whereas any otherimpressed frequency would soon get out of step with the oscil-lations it sets up, and would force them to die down again.Acoustical resonance is illustrated by the way in which onevibrating tuning fork will set another into vibration if both havethe same pitch, but not otherwise. Another acoustical examplecomes from Helmholtz's resonators: air chambers vibratingwith a definite pitch, which are set into resonant vibration ifsound of that particular pitch falls on them, but not appreciablyby any other pitch, so that they can be used to pick out a particu-lar note in a complicated sound and estimate its intensity.The resonance of electric circuits is illustrated in the tunedcircuits of the radio, which respond only to sending stationsof a particular wave length, and practically not at all to otherstations. In optics, the theory of refractive index and absorp-tion coefficient is closely connected with resonance. As isshown by the sharp spectrum lines, atoms contain oscillatorscapable of damped simple harmonic motion, or at any rate actas if they did; the real theory, using wave mechanics, is com-plicated but leads essentially to this result. An external lightwave is a sinusoidal impressed force, leading to a forced motionof the oscillators with the same frequency but different phase.The component of motion in phase with the field reacts back onthe field to change its phase, and this progressive change ofphase as the light travels through the body is interpreted as achanged velocity of propagation, or an index of refraction differ-ent from unity. Similarly the other component produces adiminution of intensity, or absorption. The phenomenon ofanomalous dispersion, with abnormally large index of refractionand absorption coefficient, comes about when the external waveis in resonance with the atom.
22. Mechanical Resonance.Let the external force be Fcos cot. It is simpler to regard this as being the real part ofF e 1 . Thus we use the differential equation
m~dfi
+ 2mk'dt+ mo>2x = F
eia"> W
-
DAMPED VIBRATIONS AND FORCED VIBRATIONS 31
where we use co for the natural angular frequency, to distinguishfrom the impressed angular velocity co. The resulting x will becomplex, and its real part represents the actual motion. Now weassume that the forced motion has the same frequency as theimpressed force, or that x = Ae iwt
,where A may be complex.
If A r and At are the real and imaginary parts of A, we easily seethat the real part of x is given by
A r cos (at Ai sin at, (8)so that in general* the motion has one term in phase with theforce, whose amplitude is given by the real part of A, and anotherout of phase, the amplitude being the negative of the imaginarypart. Substituting our exponential formula for x in Eq. (7), wehave
[ra( co2) + 2mk(io)) + m(aQ2]Aeiwt = Foe 1"'.
Canceling the exponential, we have
A =ll I (Q\m (o> 2 - co 2) + 2ika' W
To get the coefficients of terms in phase and out of phase withthe force, or A r and Ai, we multiply numerator and denomina-tor by the conjugate of the denominator, obtaining respectively
A r = '- COq2 CO
2
to (co 2 - co 2)2 + 4A; 2co2
and
_a__Fq 2/bco1
to (coo 2 - co2)2 + 4A; 2co2
" UUj
These two functions are plotted in Fig. 4. It is seen that thefirst has the form made familiar by the anomalous dispersioncurve in optics, the second resembling the corresponding absorp-tion curve. This resemblance is an essential one, as we shallsee in Chap. XXIV. One feature of the curves should bementioned. The anomalous behavior in the neighborhood ofcoo is confined to a narrower and narrower band of frequenciesas & becomes smaller and smaller compared with co
,so that if
the damping is very small the resonance is very sharp, while ifthere is large damping, there is a broad range of frequencies overwhich resonance is appreciable.
23. Electrical Resonance.Suppose that a dynamo suppliessinusoidally alternating electromotive force, given by E cos wt,
-
32 INTRODUCTION TO THEORETICAL PHYSICS
to an electric circuit containing resistance, inductance, andcapacity. The differential equation for the charge is then
d2q jjdqdf2 +
Rm + i E COS wt. (11).
We set up instead the differencial equation for the current i =
Fig 4.Amplitude of forced motion of an oscillator, as function of frequency.(a) Component in phase with force; (6) component out of phase.
dq/dt, which we obtain from Eq. (11) by differentiating withrespect to time
:
T dH , ^di , i d /T1 ,. (12)
As with the mechanical case, we replace E cos cot by the complexexponential Eeiut
,of which the real part gives the electromotive
force. Similarly we assume the current to be sinusoidal, givenby the real part of i eiut . Making these changes in Eq. (12),and carrying out the differentiations, we have
.(E
5/ = ioiEe1
^o=
R + i(U> - 1/Cw)The denominator here equals Zeia, where
Z = V# 2 + X 2 , X = Lo cJ
(13)
(14)
and
a tan"XW
-
DAMPED VIBRATIONS AND FORCED VIBRATIONS 33
where X is called the reactance, Z the impedance. Then thecurrent is
Ei = y COS (ait a). (15)
The impedance takes the place of the resistance in problemsinvolving alternating currents, since we divide the amplitude ofthe e.m.f. by


![[Type text] [Type text] [Type text]](https://static.fdocuments.in/doc/165x107/61ec84b0abca616e814ee6cd/type-text-type-text-type-text.jpg)