SLAM PSanthanam
26
Simultaneous Localization & Mapping - SLAM Praveen K Santhanam – pks6
-
Upload
nikhil-jain -
Category
Documents
-
view
221 -
download
0
Transcript of SLAM PSanthanam

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 1/26
Simultaneous Localization &Mapping - SLAM
Praveen K Santhanam – pks6

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 2/26
NUT SHELL
SLAM is a technique used to buildup a map within an unknownenvironment or a knownenvironment while at the same timekeeping track of the currentlocation

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 3/26
To a human
Assume !ou are blindfolded in aroom

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 4/26
What is SLAM?
o "he problem has # stages$ Mapping
$ Locali%ation
o "he parado&'$ (n order to build a map) we must know our
position
$ "o determine our position) we need a map*
o SLAM is like the chicken+egg problemo Solution is to alternate between the two
steps

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 5/26
SLAM – Multiple parts
Landmark e&traction data association
State estimation state update landmark update
"here are man! wa!s to solve each of
the smaller parts

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 6/26
Har!are
Mobile ,obot
,ange Measurement -evice
$ Laser scanner – .A//0" be usedunderwater
$ Sonar – /0" accurate
$ 1ision – .annot be used in a room with
/0 light

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 7/26
The goal o" the process
"he SLAM process consists of number of steps
o 2se environment to update the position of the robotSince the odometr! of the robot is often erroneous wecannot rel! directl! on the odometr!
o 3e can use laser scans of the environment to correct theposition of the robot
o "his is accomplished b! e&tracting features from theenvironment and re observing when the robot movesaround

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 8/26
E#tene $alman %ilter
An 4K5 4&tended Kalman 5ilter7 is the heart of the
SLAM process o (t is responsible for updating where the robot thinks
it is based on the Landmarks features7
o "he 4K5 keeps track of an estimate of theuncertaint! in the robots position and also theuncertaint! in these landmarks it has seen in the
environment

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 9/26
'er'ie!
Laser Scans
0dometr! .hange
4K5 /ew0bservations
4K5 ,e+observation
4K5 0dometr! update
-ata Association
Landmark 4&traction

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 10/26

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 11/26

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 12/26

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 13/26

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 14/26

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 15/26
Laser & ometr( ata
Laser data is the reading obtainedfrom the scan
"he goal of the odometr! data is toprovide an appro&imate position ofthe robot
"he difficult part about the
odometr! data and the laser data isto get the timing right

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 16/26
Lanmar)s
Landmarks are features which caneasil! be re+observed anddistinguished from the environment
"hese are used b! the robot to findout where it is to locali%e itself7

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 17/26
The )e( points a*out suita*le Lanmar)s
o Landmarks should be easil! re+observable
o
(ndividual landmarks should bedistinguishable from each other
o Landmarks should be plentiful in theenvironment
o Landmarks should be stationar!

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 18/26
(n an indoor environment such as that used b! our robot there areman! straight lines and well defined corners "hese could all be used
as landmarks

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 19/26
Lanmar) E#traction
0nce we have decided on whatlandmarks a robot should utili%e weneed to be able to somehow reliabl!e&tract them from the robotssensor! inputs
"he # basic Landmark 4&traction
Algorithms used are Spikes and,A/SA.

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 20/26
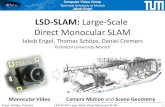
Spi)e
o "he spike landmark e&traction uses e&trema to find landmarks
o when some of the laser scanner beams reflect from a wall andsome of the laser scanner beams do not hit this wall) but arereflected from some things further behind the wall
Spike landmarks "he red dots are table legs e&tracted as landmarks
Spike landmarks rely on the landscape changing a lot between two laserbeams. This means that the algorithm will fail in smooth environments.

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 21/26
+ANSA, +anom Sampling ,onsensus.
"his method can be used to e&tract lines from alaser scan that can in turn be used as landmarks
,A/SA. finds these line landmarks b! randoml!
taking a sample of the laser readings and then usinga least squares appro&imation to find the best fitline that runs through these readings
.onsensus

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 22/26
/ata Association
"he problem of data association is that ofmatching observed landmarks fromdifferent laser7 scans with each other
Problems in -ata Association 8ou might not re+observe landmarks ever! time
8ou might observe something as being a landmark butfail to ever see it again
8ou might wrongl! associate a landmark to apreviousl! seen landmark

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 23/26
Algorithm – Nearest Neigh*our Approach
3hen !ou get a new laser scan use landmarke&traction to e&tract all visible landmarks
Associate each e&tracted landmark to the closestlandmark we have seen more than / times in the
database Pass each of these pairs of associations e&tracted
landmark) landmark in database7 through avalidation gate (f the pair passes the validation gate it must be the same
landmark we have re+observed so increment the number oftimes we have seen it in the database
(f the pair fails the validation gate add this landmark as a newlandmark in the database and set the number of times wehave seen it to 9

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 24/26
'er'ie! o" the process
2pdate the current state estimateusing the odometr! data
2pdate the estimated state from re+observing landmarks
Add new landmarks to the currentstate

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 25/26
%inal +e'ie! – pen Areas
"here is the problem of closing the loop"his problem is concerned with the robotreturning to a place it has seen before
"he robot should recogni%e this and usethe new found information to update theposition
5urthermore the robot should update the
landmarks found before the robotreturned to a known place) propagatingthe correction back along the path

7/21/2019 SLAM PSanthanam
http://slidepdf.com/reader/full/slam-psanthanam 26/26
+e"erences
Slam for dummies) b! Soren,iisgaard : Morten ,ufus ;las
3ikipedia + Slam Minimal Slam for 4fficient 5loor+
Planning) b! Stephen Pfetsch
http'<<farm9staticflickrcom<=><9?99@#96#a@BdaBb@6#Cpghttp'<<=bpblogspotcom<beboLK;Kn-c<,!ai>,oDav(<AAAAAAAAA.(
<oq@h@6%BE%8<s=#?<5ittedlineCpg