Sistema Sensorial Ultra-Sônico Robô Móvel com … . 2: Categorias agentes . Fig . Um sistema de...
6
Sistema Sensorial Ultra-Sônico para Robô Móvel com Controle Baseado em Agentes Eduardo Oliveira Freire Teodiano Freire Bastos Filho Vladimir Dynnikov Hans J õrg Schneebeli Departamento de Engenharia Elétrica Universidade Federal do Espírito Santo - UFES Caixa Postal 01-9011 29060-970 Vitória ES [email protected] Abstract: The availability of sensorial data is a major drawback for mobile robot navigation systems. For a mobile robot under construction at UFES, an agent-based control system is being implemented, for which an ultrasonic system was developed . This sensing system is able to provide the information on the type of detected obstacle as well as on the distance from it to the robot. Using the agents model, it was possible to design the ultrasonic sensing system with the capability of avoiding the generation of redundant or unnecessary information, as well as to decide if an information is relevant or not. Resumo: A limitada disponibilidade de informações sensoriais é um dos maiores entraves para a melhoria de desempenho dos sistemas de navegação de robôs móveis. Um sistema sensorial ultra- sônico foi desenvolvido para um robô móvel, com sistema de controle baseado em agentes. Este sistema sensorial fornece informações sobre o obstáculo detectado e a distância ao mesmo. Usando o modelo de agentes, foi projetado um sistema sensorial capaz de evitar a produção de informações redundantes ou desnecessárias, além de decidir quando uma informação é relevante ou não. 1. Introdução Um robô móvel a rodas do tipo differential drive está em construção no Laboratório de Automação Inteligente (LAI) da Universidade Federal do Espírito Santo (UFES). Este robô móvel consiste em uma plataforma redonda com quatro rodas, sendo que duas delas são montadas sobre um eixo comum e são independentemente acionadas por dois motores DC, enquanto que as outras duas são rodas livres. A plataforma redonda e o esquema de tração do tipo differ ential drive aumentam a capacidade de manobra do robô móvel. A figura I mostra este robô , denominado Brutus. Além da plataforma mecânica, é possível ver alguns transdutores ultra-sônicos . a robô é dotado de um microcontrolador MC68332, 2 MB de memória RAM e I MB·de memória RaM. a microcontrolador é utilizado para controlar diversos processos (percepção sensorial interna -através de encoders- e externa -através de sensores de ultra-o som-- e planejamento de trajetórias). a robô é projetado para ser capaz de evitar colisões enquanto executa algum tipo de comportamento em ambientes semi-estruturados. Ambientes semi-estruturados são aqueles nos quais os limites não são conhecidos a priori pelo sistema de 471 controle, mas é um ambiente fechado, de terreno regular. a ambiente de operação do robô também contém um número finito de objetos conhecidos: paredes: cantos, cadeiras e mesas. No entanto, objetos desconhecidos, que porventura estejam na trajetória do robô, serão detectados pelo sistema de sensoriamento e o sistema de controle estará apto para desviar dos mesmos, evitando colisões. Fig. 1: Robô Móvel Brutus. 2. Estrutura para Construção de Sistemas ode Controle Baseados em Comportamentos [Schneebeli (1992)] apresenta uma abstração para controladores baseados em agentes, na qual eles são representados por módulos concorrentes e interconectados, distribuídos em três categorias:
Transcript of Sistema Sensorial Ultra-Sônico Robô Móvel com … . 2: Categorias agentes . Fig . Um sistema de...

Sistema Sensorial Ultra-Sônico para Robô Móvelcom Controle Baseado em Agentes
Eduardo Oliveira FreireTeodiano Freire Bastos Filho
Vladimir DynnikovHans J õrg Schneebeli
Departamento de Engenharia ElétricaUniversidade Federal do Espírito Santo - UFESCaixa Postal 01-9011 29060-970 Vitória ES
Abstract: The availability of sensorial data is a major drawback for mobile robot navigation systems.For a mobile robot under construction at UFES, an agent-based control system is being implemented,for which an ultrasonic system was developed . This sensing system is able to provide the informationon the type of detected obstacle as well as on the distance from it to the robot. Using the agents model,it was possible to design the ultrasonic sensing system with the capability of avoiding the generation ofredundant or unnecessary information, as well as to decide if an information is relevant or not.
Resumo: A limitada disponibilidade de informações sensoriais é um dos maiores entraves para amelhoria de desempenho dos sistemas de navegação de robôs móveis. Um sistema sensorial ultra-sônico foi desenvolvido para um robô móvel, com sistema de controle baseado em agentes. Estesistema sensorial fornece informações sobre o obstáculo detectado e a distância ao mesmo. Usando omodelo de agentes, foi projetado um sistema sensorial capaz de evitar a produção de informaçõesredundantes ou desnecessárias, além de decidir quando uma informação é relevante ou não.
1. IntroduçãoUm robô móvel a rodas do tipo differential drive estáem construção no Laboratório de AutomaçãoInteligente (LAI) da Universidade Federal do EspíritoSanto (UFES). Este robô móvel consiste em umaplataforma redonda com quatro rodas, sendo queduas delas são montadas sobre um eixo comum e sãoindependentemente acionadas por dois motores DC,enquanto que as outras duas são rodas livres. Aplataforma redonda e o esquema de tração do tipodifferential drive aumentam a capacidade de manobrado robô móvel. A figura I mostra este robô,denominado Brutus . Além da plataforma mecânica, épossível ver alguns transdutores ultra-sônicos .
a robô é dotado de um microcontrolador MC68332, 2MB de memória RAM e I MB·de memória RaM. amicrocontrolador é utilizado para controlar diversosprocessos (percepção sensorial interna -através deencoders- e externa -através de sensores de ultra-osom-- e planejamento de trajetórias). a robô éprojetado para ser capaz de evitar colisões enquantoexecuta algum tipo de comportamento em ambientessemi-estruturados.
Ambientes semi-estruturados são aqueles nos quais oslimites não são conhecidos a priori pelo sistema de
471
controle, mas é um ambiente fechado, de terrenoregular. a ambiente de operação do robô tambémcontém um número finito de objetos conhecidos:paredes: cantos, cadeiras e mesas. No entanto,objetos desconhecidos, que porventura estejam natrajetória do robô, serão detectados pelo sistema desensoriamento e o sistema de controle estará aptopara desviar dos mesmos, evitando colisões.
Fig. 1: Robô Móvel Brutus.
2. Estrutura para Construção de Sistemas odeControle Baseados em Comportamentos[Schneebeli (1992)] apresenta uma abstração paracontroladores baseados em agentes, na qual eles sãorepresentados por módulos concorrentes einterconectados, distribuídos em três categorias:

Fig. 2: Categorias de agentes .
Fig. 3: Um sistema de controle baseado em agentes.
Neste trabalho optou-se por distribuir um conjunto detransdutores ultra-sônico ao redor da plataformacircular do robô (com posicionamento fixo), comoforma de permitir um monitoramento omnidirecionalquase instantâneo do ambiente de operação do robômóvel. Os transdutores não são acionadossimultaneamente, sendo a mudança da direção demonitoramento dos mesmos efetuada por software.Foi preciso no entanto, determinar o número detransdutores ultra-sônicos (Polaroid série 7000)necessários para uma cobertura satisfatória do espaçoque cerca o robô móvel. Este cálculo foi realizadocom base na simulação dos lóbulos de emissão dostransdutores, usando o software Matlab , e concluindoque a melhor relação custo-benefício obtida foi parao caso em que foram utilizados 16 transdutores ultra-sônicos .
Fig. 4: Lóbulo de emissão de energia do transdutor eampliação dos lóbulos secundários.
Polaroid série 7000. A freqüência de ressonância decada um é de aproximadamente 50 kHz e o lóbulo deradiação tem abertura total aproximada de 34°(figura 4) .
Uma forma de obter informação sobre o ambienteonde o robô opera é utilizar um transdutor ou umvetor de transdutores presos ao eixo de um motor depasso para fazer uma varredura do ambiente ao redordo robô [Tsuzuki (1990)]. Está técnica é útil noscasos em que o sistema de sensoriamento ultra-sônicoé utilizado apenas para localizar marcas do ambiente,com o objetivo de aferir a localização do robôefetuada pelo sistema de sensoriamento interno. Poroutro lado, nos casos em que se deseja guiar o robô apartir dos dados sensoriais externos (caso do robôBrutus) , esta técnica tem o inconveniente de que épossível que um objeto que esteja no caminho dorobô não seja detectado, uma vez que durante otempo necessário para que o motor de passo completeuma volta, Ó robô já terá avançado uma distânciaconsiderável, ocasionando uma colisão.
ATUADORESCOMPORTAMENTOS
agente sensor, agente comportamento e agenteatuador (figuras 2 e 3). Nesta abordagem, como na de[Brooks (1986)], um grupo de módulos é responsávelpor uma atividade (comportamento) a ser executadapelo robô. Cada atividade representa um objetivo aser atingido por uma parte do sistema . Mecanismosde interação entre os módulos são responsáveis pelamediação e definição do objetivo prior itário.
EJ COMPORTAMENTO VAGARO COMPORTAMENTO EVITAR OBSTÁCULOS
A estrutura para a construção de sistemas de controlebaseados em comportamentos desenvolvida por[Xavier (1996)] implementa as abstrações de[Schneebeli (1992)] utilizando a linguagem C++ eblibliotecas de concorrência. Com isso é construídauma estrutura concorrente orientada a objetos, que ébastante apropriada ao modelamento dos sistemasbaseados em comportamentos, agrupandocaracterísticas interessantes como a modularidade,encapsulamento, herança, concorrência e a eficiênciado C++.
Nessa estrutura, os módulos de controle (agentes) sãoconstruídos como instâncias de classes definidas pelousuário, que por sua vez são derivadas das classessensor, comportamento e atuador. Desse modo,múltiplos agentes podem ser criados a partir de umaúnica definição de classe, por instanciação, mesmoem tempo de execução. Neste caso, tais agentesseriam diferenciados uns dos outros através dosargumentos passados ao construtor da nova classe epelas portas de comunicação estabelecidas.
3. Hardware do Sistema Sensorial Ultra-SônicoOs sensores ultra-sônicos podem ser utilizados paraajudar o sistema de navegação do robô, fornecendoinformações úteis para o planejamento de trajetórias.Para implementar o sistema de sensoriamento ultra-sônico, foram usados transdutores elestrotáticos da
Uma placa da Polaroid (6500 Series Sonar RangeModule) foi adaptada para ser compartilhada pelos16 transdutores ultra-sônicos através de um circuitodemultiplexador. A placa da Polaroid fornece ospulsos de excitação dos transdutores e executa oprocessamento básico dos sinais de eco recebidos(através do circuito demultiplexador) .
472

Com o objetivo de compensar o efeito da variação datemperatura no ambiente de operação do robô sobre avelocidade do som (que afeta a informação dedistância), foi utilizado um sensor de temperaturabaseado no circuito integrado LM3S.
(paredes e armários), cantos, pés de mesa(retangulares e cilíndricos) e pés de cadeiracilíndricos. Esta capacidade, torna a tarefa decontrole do robô mais flexível, desde que é possível,por exemplo, distinguir uma parede de um pé demesa.
onde Kp, K, e K; são constantes, x é a distância, r é oraio do cilindro e a é o coeficiente de atenuação do ar(igual a 1.61xlO- 12f dB i/em, ondefé a frequência).
A técnica utilizada consiste em medir o valor de picodo sinal de eco refletido pelo objeto, e compará-locom o valor obtido através da aplicação de uma dasseguintes relações entre valor de pico e distância,(uma para cada tipo de obstáculo) [Abreu (1990)):
4. Técnicas de Medição de Distância eReconhecimento de ObstáculosForam implementados alguns algoritmos no softwaredesenvolvido para controlar e test ar o sistema desensoriamento ultra-sônico do móvel Brutus. Estesoftware intitulado "ultra som ", foi escrito nalinguagem de programação Borland C++ 3.1.
4.1. Técnica de medição de distânciaA técnica utilizada para medir distâncias foi oconhecido método de Pulso-Eco [Bastos (1994)] .Utilizando esta técnica, a distância x entre o sensor eo obstáculo detectado é dad a por:
(1)2
onde Co é a velocidade do som a O°C (331,6 m/s), T éa temperatura em °C e t é o tempo de vôo do sinalultra-sônico.
K e-arU,,(x)=-"--
xK -ar b
U (_ ,e -a-
r x) - 2X
K -arESU,,(x) = _ ce r_x x+r
(2)
(3)
(4)
A figura S mostra o desempenho do sistema desensoriamento ultra-sônico na obtenção de distância aum obstáculo. O experimento foi realizado utilizandouma parede (plano infinito) a uma distância de SOcmdo sensor ultra-sônico. O valor médio do conjunto de1000 medições realizadas foi igual a SO ,09cm e odesvio padrão do conjunto de medições foi igual a0,14cm.
0.52
0.515
0.51
2: 0.505o . - - .. , - . - .. -, _. - " ' , -.. _.u 0.5o::'"0.495o(ij> 0.49
0.485
0.48
0.475o 200 400 600 800 1000Medidas
Fig . S: Valores de distância obtidos com o sistema desensor iamento construído.
4.2. Técnica de reconhecimento de obstáculosCom o objetivo de obter mais informações sobre oambiente de operação do robô móvel, foiimplementado um algoritmo que permite ao sistemade sensoriamento ultra-sônico reconhecer osobstáculos que são detectados. O sistema é capaz dereconhecer os seguintes tipos de obstáculos: planos
473
A figura 6 mostra as relações teóricas e experimentaisentre o valor de pico e distância, além da faixa dedistância na qual cada tipo de obstáculo pode serreconhecido [Freire (1997)] . A equação 2 é utilizadapara calcular a relação entre valor de pico e distânciapara os planos (paredes e armários), a equação 3para pés de mesa retangulares e a equação 4 para pésde mesa e cadeira cilíndricos.
3
2.5
?: 2ou15u (o(ij> 1
50 60 70 80 90 100Distância (em)
Fig . 6: Relações experimentais e teóricas entre ovalor de pico e distância para o conjunto deobstáculos que podem ser reconhecidos.
Como mostra a Figura 6, é possível caracterizar bemtodos os obstáculos à exceção dos cantos e pés demesa cilíndricos. Este problema foi .so lucionadoutilizando uma característica construtiva particular dosistema de sensoriamento ultra-sônico desenvolvido,que permite o reconhecimento de cantos da forma
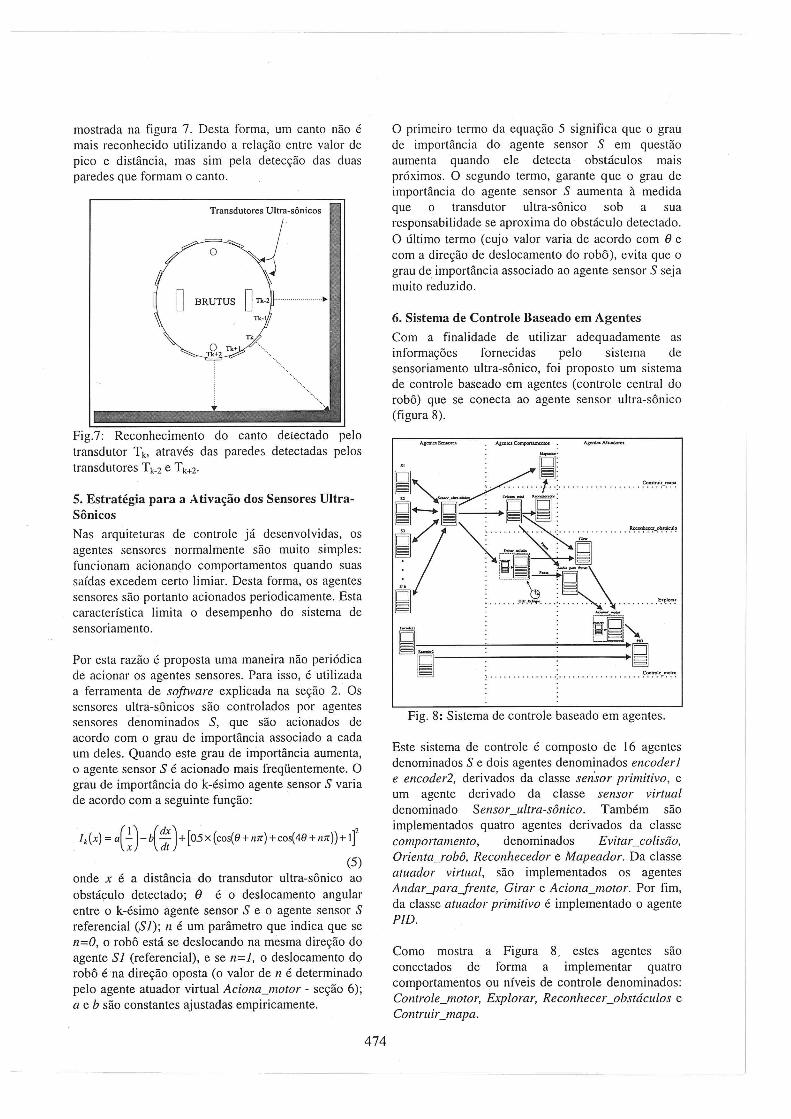
mostrada na figura 7. Desta forma , um canto não émais reconhecido utilizando a relação entre valor depico e distância, mas sim pela detecção das duasparedes que formam o canto .
Transdutores Ultra-sônicos
..... . m .... .. .
Fig.7 : Reconhecimento do canto detectado pelotransdutor Tb através das paredes detectadas pelostransdutores Tk-2 e Tk+2.
5. Estratégia para a Ativação dos Sensores Ultra-SônicosNas arquiteturas de controle já desenvolvidas, osagentes sensores normalmente são muito simples:funcionam acionando comportamentos quando suassaídas excedem certo limiar. Desta forma, os agentessensores são portanto acionados periodicamente. Estacaracterística limita o desempenho do sistema desensoriamento.
Por esta razão é proposta uma maneira não periódicade acionar os agentes sensores. Para isso, é utilizadaa ferramenta de software explicada na seção 2. Ossensores ultra-sônicos são controlados por agentessensores denominados 5, que são acionados deacordo com o grau de importância associado a cadaum deles . Quando este grau de importância aumenta,o agente sensor 5 é acionado mais freqüentemente. Ograu de importância do k-ésimo agente sensor 5 variade acordo com a seguinte função:
. /k(X) = )-b(:)+ [05 x (cos(8+1I1r) +cos(48+1I1r))+ It(5)
onde x é a distância do transdutor ultra-sônico aoobstáculo detectado; e é o deslocamento angularentre o k-ésimo agente sensor 5 e o agente sensor 5referencial (51); n é um parâmetro que indica que sen=O, o robô está se deslocando na mesma direção doagente 51 (referencial), e se n=l, o deslocamento dorobô éna direção oposta (o valor de n é determinadopelo agente atuador virtual Aciona_motor - seção 6);a e b são constantes ajustadas empiricamente.
474
O primeiro termo da equação 5 significa que o graude importância do agente sensor 5 em questãoaumenta quando ele detecta obstáculos maispróximos. O segundo termo, garante que o grau deimportância do agente sensor 5 aumenta à medidaque o transdutor ultra-sônico sob a suaresponsabilidade se aproxima do obstáculo detectado.O último termo (cujo valor varia de acordo com e ecom a direção de deslocamento do robô), evita que ograu de, importância associado ao agente sensor 5 sejamuito reduzido.
6. Sistema de Controle Baseado em AgentesCom a finalidade de utilizar adequadamente asinformações fornecidas pelo sistema desensoriamento ultra-sônico, foi proposto um sistemade controle baseado em agentes (controle central dorobô) que se conecta ao agente sensor ultra-sônico(figura 8).
" : ror
...: : L___ _ 'MO'" : 'b :§18 : E .•
.
§; :-Fig . 8: Sistema de controle baseado em agentes.
Este sistema de controle é composto de 16 agentesdenominados 5 e dois agentes denominados encoderJe encoder2, derivados da classe sensor primitivo, eum agente derivado da classe sensor virtualdenominado Sensor_ultra-sônico. Também sãoimplementados quatro agentes derivados da classecomportamento, denominados Evitarcolisão.Orienta robô, Reconhecedor e Mapeador. Da classeatuador virtual , são implementados os agentesAndar-fJaraJrente, Girar e Aciona_motor. Por fim,da classe atuador primitivo é implementado o agentePJD.
Como mostra a Figura 8. estes agentes sãoconectados de forma a implementar quatrocomportamentos ou níveis de controle denominados:Controle_motor, Explorar, Reconhecer_obstáculos eContruir_mapa.

Os agentes S são responsáveis por disparar ostransdutores ultra-sônicos e por processar o sinal deeco (obtenção de distância aos obstáculos,digitalização da envoltória do sinal de eco,determinação do seu valor de pico e da área sob oprimeiro eco) de cada um dos 16 transdutores. Estasinformações, além do grau de importância absolutode cada agente S (calculado através da equação 5),são passados através de uma mensagem ao agenteSensorjultra-sônico, que mantém internamente duaslistas: uma contendo a distância ao obstáculo e outrao grau de importância de cada agente S. Quando oagente SensOl"_ultra-sônico recebe uma mensagemque contém uma informação de distância de valorinferior a 100cm (considerada uma distância deperigo) , ele envia uma mensagem ativando os agentes 'Evitar_colisão e Orienta robô . Se esta distância forinferior a 40cm, o agente Orienta robô é desativadoe o agente Evitar_colisão inicia o seu processamento.Caso a distância esteja na faixa entre 40cm e 100cm,o agente Evitar_colisão retoma ao seu estado dedormência e o 'agente Orientarobô é que inicia o seuprocessamento.
Quando o agente Sensor_ultra-sônico recebe umamensagem de um agente S, ele a respondeinformando o somatório dos graus de importância(calculado pela equação 5) dos 16 agentes S. Dessaforma, o agente S pode calcular o seu grau deimportância relativo, dividindo seu grau deimportância absoluto pelo somatório recebido doagente Sensorjultra-s ônico. O inverso deste grau deimportância relativo é usado pelo agente S paraprogramar o seu relógio interno (que todo agentederivado das classes sensor primitivo e sensor virtualpossui), alterando os intervalos de tempo ao final dosquais o agente S é ativado. Uma vez que os recursosde hardware são compartilhados por todos sensoresultra-sônicos, quando um agente S é ativado ele entraem uma fila e aguarda a sua vez de utilizar estesrecursos de hardware. À medida que o grau deimportância de um agente S aumenta, o intervalo detempo entre duas ativações diminui e o agente S entrana fila mais freqüentemente.
Cada agente S é responsável por atualizar , a cadasegundo, o período do seu relógio interno. Como elenão dispõe de um outro relógio que possa contar otempo de I segundo ao fim do qual a atualizaçãodeve ser realizada, isto é feito dividindo-se I segundopelo período atual do relógio, O resultado é usadocomo uma variável de contagem regressiva, que é .decrementada a cada vez que o agente é ativado.Quando esta variável atinge o valor O, então o agenteaplica a equação 5 e envia o seu grau de importânciaabsoluta ao agente SensOl"_ultra-sônico, que por suavez retoma o valor atual do somatório de todos osgraus de importância absolutos armazenados em suatabela interna.
475
---------Quando .um determinado agente .Smedição de distância que tem como resultado umvalor dentro de uma das faixas de reconhecimento deobstáculos, ele envia imediatamentepara_o_ agenteSensorultra-sõnico (sem esperaf""o próximomomento de atualização do período de seu relógiointerno), um grau de importância cuj;;valQf é muitomaior do que o calculado pela equação 6. Isto garanteque este agente S irá ter um grau de importânciarelativo próximo de 100% e que os de;nàis agentesterão um grau de importância muito pequeno. Estavariação dos diversos graus de importânciaassociados a cada agente S garante ao agente S emquestão quase que a exclusividade de acesso aosrecursos de hardware e software do finaldo processo de reconhecimento, o agente S aoagente Senso r_ultra-sônico o valor real do seu graude importância absoluto (aplicando a equação 5),voltando a ter um grau de importância normal.
Quando o agente Evitar_colisão micra oprocedimento de evitar obstáculos, .ele envia umamensagem de pausa ao agente Andar-paraJrente,que pára o robô enquanto ele gira em torno de seupróprio eixo, devido a uma mensagem enviada peloagente Evitar_colisão ao agente Girar, A direção evelocidade de giro são determinadas aleatoriamente.Depois de algum tempo, determinado pelo objetoRelógio associado ao agente Evitar_colisão, esteagente envia uma mensagem desativando o agenteGirar e então, a mensagem de pausa enviada aoagente Andar-paraJrente é suspensa, permitindoque robô continue a o seu ambiente deoperação, Se o giro efetuado não foi suficiente paraevitar a colisão com o obstáculo detectado, então umdos agentes S irá novamente detectar este obstáculo auma distância inferior a 40cm e o processo descritoserá repetido .
O agente EvitarJolisão possui um tipo de buffer deentrada denominado Canal, que é capaz de recebermensagens de todos os agentes S e executar umaoperação com elas, tal como obter o valor médio,máximo ou mínimo por exemplo. No caso do agenteEvitarcolisão, o canal passa ao agente a mensagemque contiver o menor valor de distância medido (queé proveniente do agente S cujo transdutor associadoestá apontado para a direção onde é mais provávelocorrer uma colisão).
O comportamento Reconhecer_obstáculo é acionadosempre que o agente Sensor_ultra-sônico receberuma mensagem que contenha um valor de distânciana faixa entre 40cm e 100cm. Quando isto acontece,o agente Orienta robô inicia o procedimento quepermite o reconhecimento do obstáculo detectado.Inicialmente, o agente Orienta.robõ envia umamensagem de pausa ao agente Andar-paraJrenteque faz com que o robô pare, e uma mensagem ao

agente Girar, fazendo com que o robô gire em tornode seu próprio eixo, procurando um melhoralinhamento entre o eixo de emissão acústica dotransdutor ultra-sônico e o obstáculo detectado.Quando esta orientação é atingida (verificada atravésdo máximo valor de pico do eco) , o agenteOrienta robô calcula a média dos próximos dezvalores de distância, valor de pico e área sob oprimeiro eco, contidos nas mensagens' recebidas doagente Sensorultra-sõnico. Depois disso, o agenteOrienta_robô envia uma mensagem contendo osresultados obtidos para o agente Reconhecedor. Umaoutra mensagem suspende a mensagem de pausaenviada ao agente Andar-paraJrente, permitindo aorobô retomar a sua tarefa de exploração do ambiente.O agente Reconhecedor, que foi ativado pelamensagem recebida do agente Orienta_robô, executao algoritmo de reconhecimento de obstáculos descritona seção 4.2 e uma vez tendo reconhecido oobstáculo detectado, envia o resultado obtido em umamensagem que ativa o agente Mapeador, responsávelpor construir e manter atualizado o mapa do ambientede operação do robô móvel. O agente Mapeadorrecebe também mensagens do agente Sensor_ultra -sônico, todas as vezes que a tabela contendo asdistâncias medidas pelos 16 agentes S for atualizada.Desta forma, é implementado o comportamentoCostruirjrnapa.
o agente Aciona_motor também tem uma entrada dotipo canal, que passa ao agente o somatório dascomponentes de velocidade recebidas dos agentesAndar-paraJrente e Girar. O agente Aciona_motorcalcula a velocidade que deve ser atribuída a cadamotor DC e envia esta informação ao agente PID,responsável por controlar os dois motores. Os agentesAciona_motor e PID compõem o comportamento ounível de controle denominado Controle_motor.
7. ConclusãoO sistema de sensoriamento construído demonstrouque é 'capaz de fornecer a informação necessária parapermitir .uma navegação segura do robô móvel emambientes semi-estruturados.
A localização dos transdutores ultra-sônicos sobre aplataforma do robô permitiu sensoriar de formaeficiente e rápida o seu ambiente de operação, alémde reduzir o problema de crosstalk entre ostransdutores, devido ao fato de que estando eles sobrea plataforma redonda do robô, estão todos apontadospara direções diferentes .
A estratégia proposta para a ativação dos agentessensores S (responsáveis pelos sensores ultra-sônicos), permitiu a redução da produção deinformação redundante ou desnecessária, tornando atarefa de navegação do robô móvel mais fácil.
476
A capacidade de reconhecer obstáculos conferiu maisflexibilidade ao sistema de controle, permitindo oprojeto de um maior número de comportamentos, oque atribui ao robô a possibilidade de executartarefas mais complexas.
Finalmente, o sistema de controle baseado emagentes proposto mostra como conectar o sistema desensoriamento ultra-sônico ao sistema de controlecentral, de uma forma eficiente.
/8. ReferênciasE. Coste-Maniêre, E., H. H. Wang, A. Peuch. Control
Architectures: What's Going On? Proceedingsof the lnternational Program Development inURIC, Pp. 54-60, March 2-3, Lisboa, Portugal(1995) .
E. O. Freire. Desenvolvimento de um Sistema deSensoriamento Ultra-Sônico Para um RobôMóvel com Controle Baseado em Agentes,Dissertação de Mestrado, Universidade Federaldo Espírito Santo , Vitóri a ES (1997).
F. Tsuzuki. Desenvolvimento de um SistemaSensorial Baseado em Ultra-Som pará Auxiliaro Sistema de Navegação de Robôs Móveis,Dissertação de Mestrado, Escola Politécnica daUniversidade de São Paulo, São Paulo (1990) .
H. A. Schneebeli. Die Steuerung von Mehrfinger-Greifersystemen, Ph.D. Thesis, KarlsruheUniversity, Karlsruhe, Germany (1992).
1. E. M. Xavier. Uma Estrutura para a Construçãode Sistemas de Controle Baseados em Agentespara Robôs Móveis . Dissertação de Mestrado,Universidade Federal do Espírito Santo, VitóriaES (1996).
J. L. Jones, A. M. Flynn . Mobile Robots: lnspiratioato Implementation. Chapter 9.. A K Peters,Wellesley, Massachusetts (1993) .
J. M. M. Abreu. An âlisis de senãles ultras ônicaspara la defin ici án de entornos en el campo de larobótica, Ph.D . Thesis, UniversidadComplutense de Madrid, Espanha ( 1990).
R. A. Brooks. Achieving Artificial IntelligenceThrough Building Robots, A.I Memo 899, MIT,Massachusetts (1986) .
T. F. Bastos Filho . Seguimiento )' Análisis deEntornos de Soldadura por Arco AutomatizadoMediante Ultrasonidos, Ph.D. Thesis,Universidad Complutense de Madrid, Madrid,Espanha (1994).