
Sinais e Sistemas - web.fe.up.ptanibal/SS/Teoricas/01sinsist_aula2.pdf · 2 SS 0809 SinSist2 3...
21
1 Faculdade de Engenharia Sinais e Sistemas SS – MIEIC 2008/2009 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 -34 -32 -30 -28 -26 -24 -22 -20 -18 -16 -14 Frequency (kHz) Power/frequency (dB/Hz) Power Spectral Density Hamming kaiser Chebyshev Double Pendulum Two coupled planar pendulums with gravity and sine wave forcing in the upper Revolute joint. Sine Wave B F Revolute1 B F Revolute Env Joint Sensor1 Joint Sensor Joint Actuator Ground CS1 Body1 CS1 CS2 Body Angle Revolute1 Revolute SS 0809 SinSist2 2 Faculdade de Engenharia Sinais e Sistemas – aula de hoje Sinais em tempo contínuo e em tempo discreto Operações elementares com sinais Transformação de variável independente Decomposição de sinais Características de sinais Sinais fundamentais Sistemas e sua interligação Propriedades de sistemas
Transcript of Sinais e Sistemas - web.fe.up.ptanibal/SS/Teoricas/01sinsist_aula2.pdf · 2 SS 0809 SinSist2 3...
1
Faculdade de Engenharia
Sinais e Sistemas
SS – MIEIC 2008/2009
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-34
-32
-30
-28
-26
-24
-22
-20
-18
-16
-14
Frequency (kHz)
Pow
er/fr
eque
ncy
(dB/
Hz)
Power Spectral Density
Hamming
kaiser
Chebyshev
Double Pendulum
Two coupled planar pendulums withgravity and sine wave forcing in the
upper Revolute joint.
Sine Wave
BF
Revolute1
B F
Revolute
Env
Joint Sensor1
Joint Sensor
Joint Actuator
Ground
CS1
Body1
CS1 CS2
Body
Angle
Revolute1
Revolute
SS 0809SinSist2 2
Faculdade de EngenhariaSinais e Sistemas – aula de hoje
Sinais em tempo contínuo e em tempo discreto
Operações elementares com sinais
Transformação de variável independente
Decomposição de sinais
Características de sinais
Sinais fundamentais
Sistemas e sua interligação
Propriedades de sistemas

2
SS 0809SinSist2 3
Faculdade de EngenhariaSinal sinusoidal em tempo contínuo
)cos()( 0 φ+ω= ttx é um sinal periódico, de período fundamental 0
0
2
ω
π=T
0
0
0T
φcos
0ω frequência angular
SS 0809SinSist2 4
Faculdade de EngenhariaSinais exponenciais em tempo contínuo
ℜ∈= aetxat ,)(Exponencial real:
0
0
0>a
0
0
0<acrescente decrescente

3
SS 0809SinSist2 5
Faculdade de EngenhariaExponenciais em tempo contínuo
ℜ∈ω= ω0
j,)( 0t
etxExponencial imaginária:
TtTteee 000 jj)(j ωω+ω
=t
e 0jω=
10j=
ω Te
é um sinal periódico0
0
2
ω
π=T
t-tee 00 jj
eωωNotas: têm o mesmo período
)sin()cos( 00j 0 tjte
t ω+ω=ω
{ } �ω=
0
0
0
2j
0
1)(
T
tdte
TtxP �=
0
00
11
T
dtT
1=
se π=ω mT 20
, de período fundamental
Relação de Euler: ℜ∈θθ+θ=θ ),sin()cos(jje
tetx 0j
)(ω=
SS 0809SinSist2 6
Faculdade de EngenhariaExponenciais em tempo contínuo
�∈= aCCetxat ,,)(Caso geral:
θ= j|| eCC
0ω+= jra
)( 0||)(θ+ω= tjrt
eeCtx
sinal periódico
envolvente exponencial
0
0
{ })(Re tx
4
SS 0809SinSist2 7
Faculdade de EngenhariaExponenciais em tempo discreto
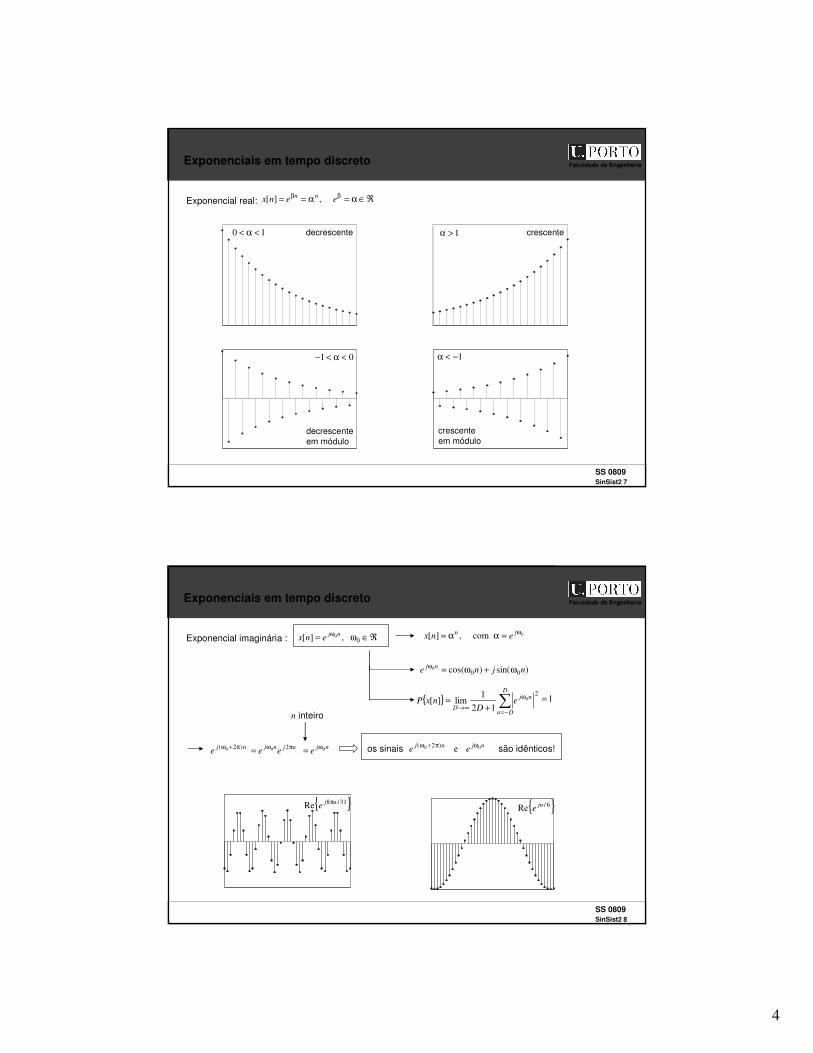
ℜ∈α=α== ββeenx
nn ,][Exponencial real:
1−<α01 <α<−
10 <α< 1>αdecrescente crescente
decrescenteem módulo
crescenteem módulo
SS 0809SinSist2 8
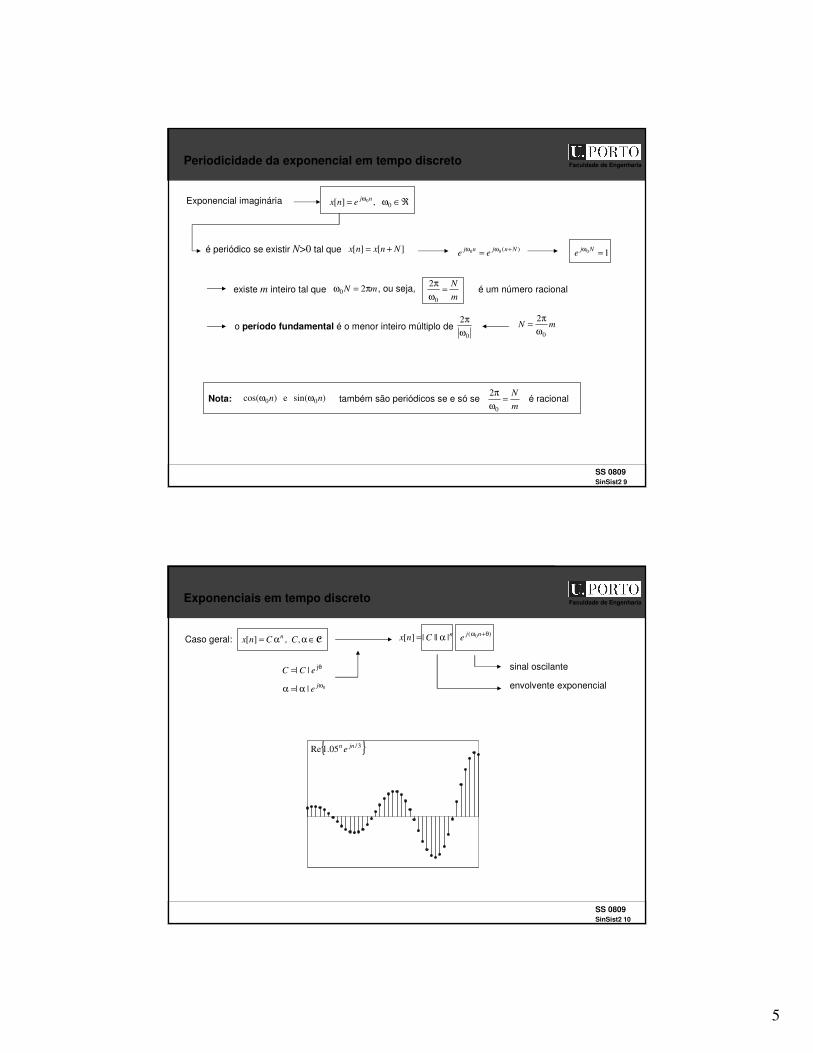
Faculdade de EngenhariaExponenciais em tempo discreto
ℜ∈ω= ω0,][ 0nj
enxExponencial imaginária :
)sin()cos( 000 njnenj ω+ω=ω
{ } �−=
ω
∞→ +=
D
Dn
nj
De
DnxP
20
12
1lim][ 1=
nje
)2( 0 π+ω njnjee
πω= 20 nje 0ω=
n inteiro
os sinais njnjee 00 e
)2( ωπ+ω são idênticos!
0com,][ω=αα= jn
enx
{ }31/8Re nje
π { }6/Re jne
5
SS 0809SinSist2 9
Faculdade de EngenhariaPeriodicidade da exponencial em tempo discreto
ℜ∈ω= ω0,][ 0nj
enxExponencial imaginária
é periódico se existir N>0 tal que ][][ Nnxnx += )(00 Nnjnjee
+ωω = 10 =ω Nje
existe m inteiro tal que mN π=ω 20m
N=
ω
π
0
2é um número racional
Nota: )sin(e)cos( 00 nn ωω também são periódicos se e só se m
N=
ω
π
0
2é racional
, ou seja,
o período fundamental é o menor inteiro múltiplo de 0
2
ω
πmN
0
2
ω
π=
SS 0809SinSist2 10
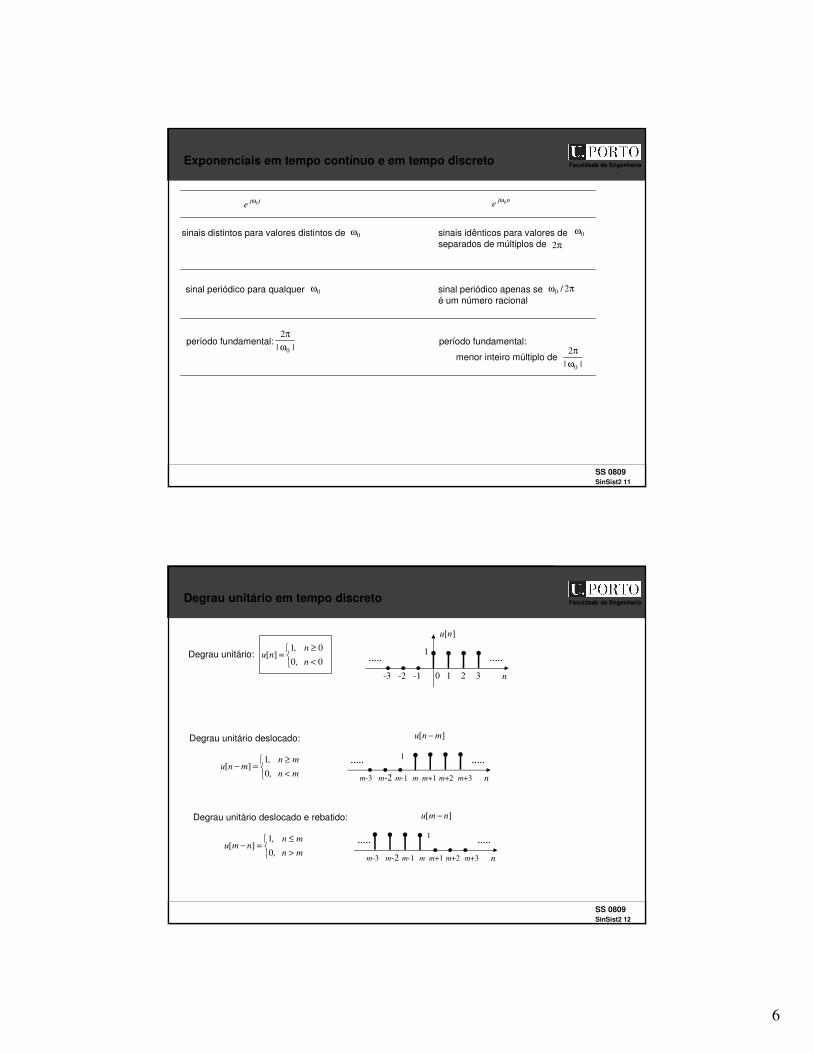
Faculdade de EngenhariaExponenciais em tempo discreto
�∈αα= ,,][ CCnx nCaso geral:
θ= j|| eCC
0||ωα=α j
e
)( 0||||][θ+ωα= njn eCnx
sinal oscilante
envolvente exponencial
{ }3/05.1Re jnn e
6
SS 0809SinSist2 11
Faculdade de EngenhariaExponenciais em tempo contínuo e em tempo discreto
tje 0ω nj
e 0ω
sinais distintos para valores distintos de 0ω sinais idênticos para valores de separados de múltiplos de
0ω
π2
sinal periódico para qualquer 0ω sinal periódico apenas seé um número racional
πω 2/0
período fundamental:||
2
0ω
πperíodo fundamental:
menor inteiro múltiplo de ||
2
0ω
π
SS 0809SinSist2 12
Faculdade de EngenhariaDegrau unitário em tempo discreto
Degrau unitário: ���
<
≥=
0,0
0,1][
n
nnu
Degrau unitário deslocado:
���
<
≥=−
mn
mnmnu
,0
,1][
Degrau unitário deslocado e rebatido:
���
>
≤=−
mn
mnnmu
,0
,1][
n0 1 2 3-1-2-3
][nu
1
nm m+1 m+2 m+3m-1m-2m-3
][ mnu −
1
nm m+1 m+2 m+3m-1m-2m-3
][ nmu −
1
7
SS 0809SinSist2 13
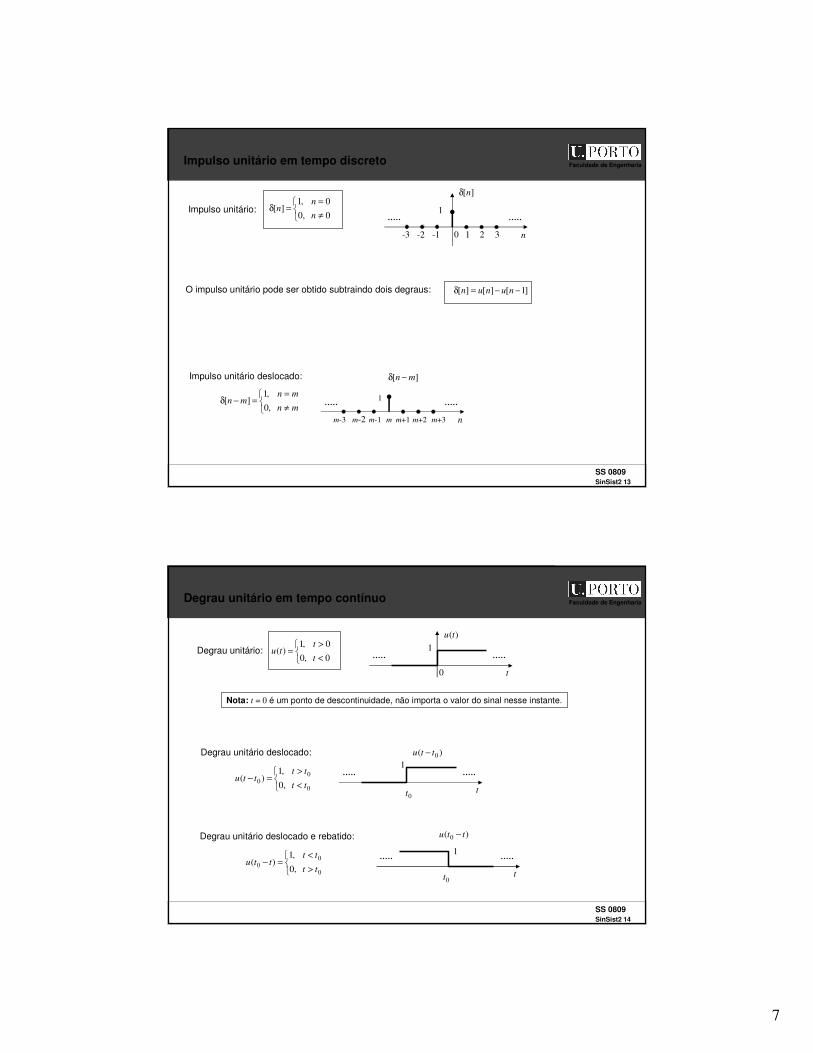
Faculdade de EngenhariaImpulso unitário em tempo discreto
Impulso unitário: ���
≠
==δ
0,0
0,1][
n
nn
Impulso unitário deslocado:
���
≠
==−δ
mn
mnmn
,0
,1][
O impulso unitário pode ser obtido subtraindo dois degraus: ]1[][][ −−=δ nunun
n0 1 2 3-1-2-3
][nδ
1
nm m+1 m+2 m+3m-1m-2m-3
][ mn −δ
1
SS 0809SinSist2 14
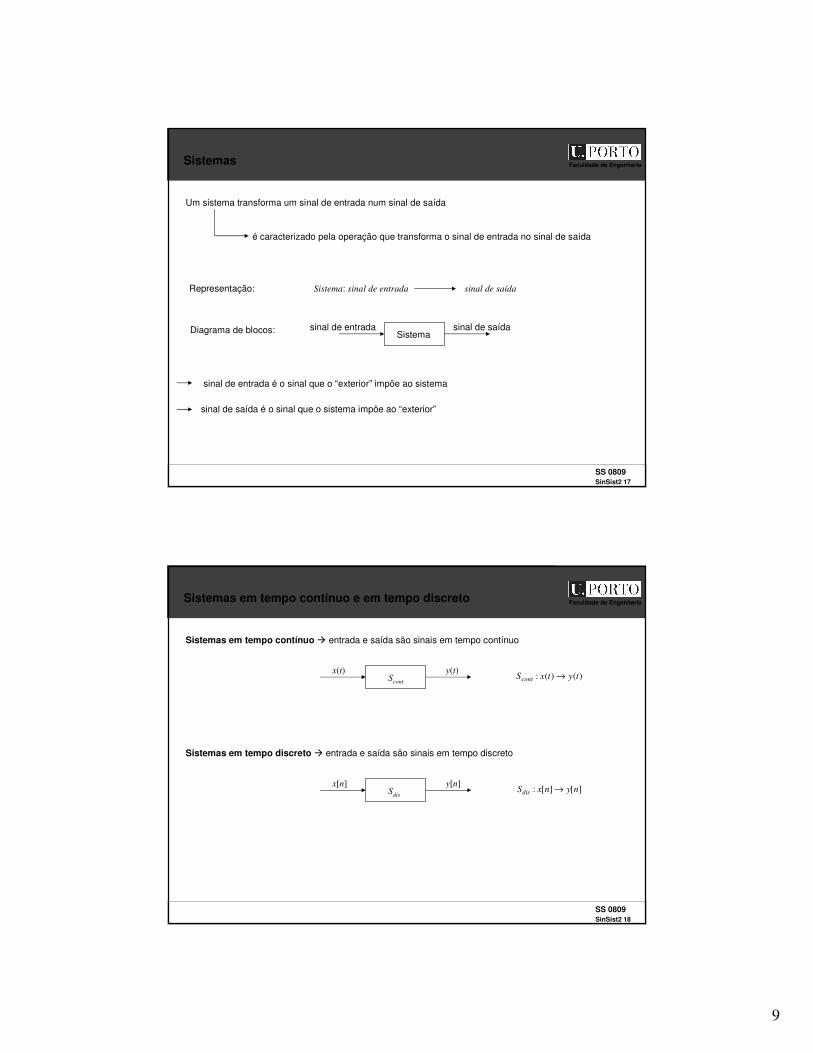
Faculdade de EngenhariaDegrau unitário em tempo contínuo
Degrau unitário: ���
<
>=
0,0
0,1)(
t
ttu
Degrau unitário deslocado:
Nota: t = 0 é um ponto de descontinuidade, não importa o valor do sinal nesse instante.
���
<
>=−
0
00
,0
,1)(
tt
ttttu
t0
)(tu
1
t
)( 0ttu −
1
0t
Degrau unitário deslocado e rebatido:
���
>
<=−
0
00
,0
,1)(
tt
ttttu
t
)( 0 ttu −
1
0t

8
SS 0809SinSist2 15
Faculdade de EngenhariaImpulso de Dirac
Aproximação contínua do degrau unitário
t0 ∆
1
)(tu∆
Derivada temporal de dt
tdut
)()( ∆
∆ =δ)(tu∆
t0 ∆
)(t∆δ
∆/1Área = 1
Impulso de Dirac: )"(lim")(0
tt ∆→∆
δ=δ
SS 0809SinSist2 16
Faculdade de EngenhariaImpulso de Dirac
t0
)(tδ
1
Propriedades:
0,0)( ≠∀=δ tt
�+∞
∞−
=δ 1)( dtt
Representação gráfica significa área = 1
Nota: O impulso de Dirac pode ser considerado como a derivada do degrau unitário:dt
tdut
)()( =δ
�+
−
=δ
0
0
1)( dtt
�+∞
∞−
δ dttft )()( �+∞
∞−
δ= dtft )0()( �+∞
∞−
δ= dttf )()0( )0(f=
9
SS 0809SinSist2 17
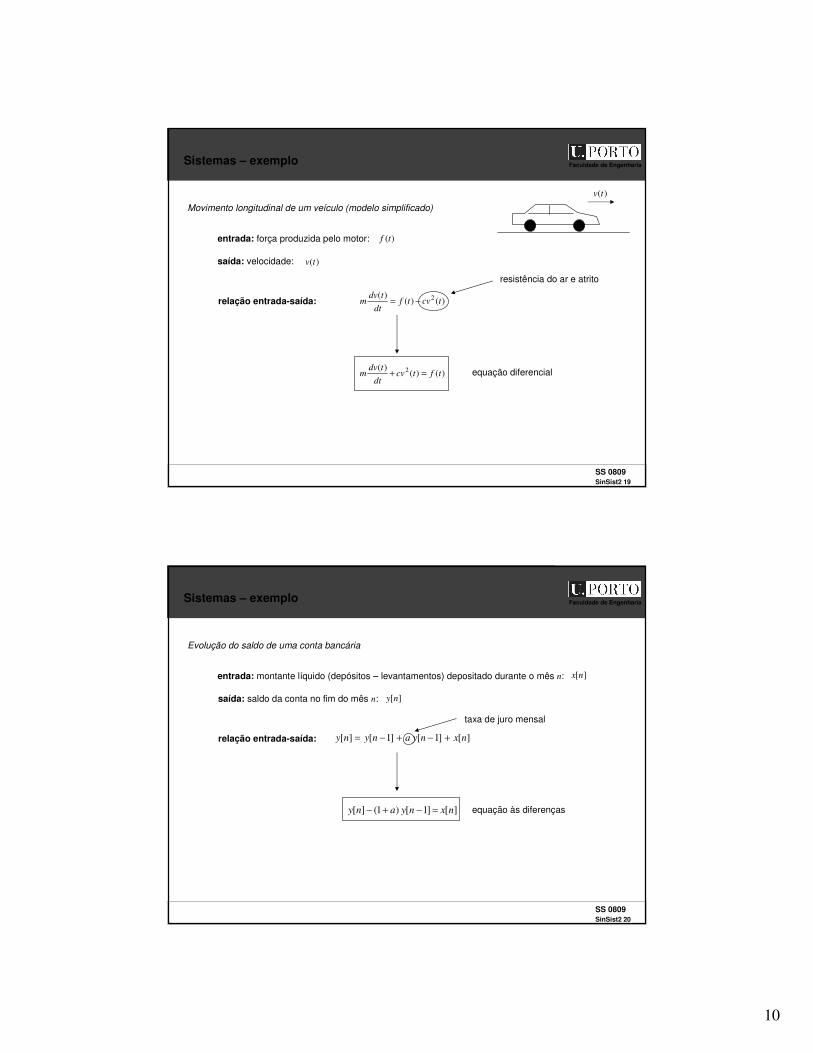
Faculdade de EngenhariaSistemas
Um sistema transforma um sinal de entrada num sinal de saída
sinal de entrada sinal de saídaSistema
é caracterizado pela operação que transforma o sinal de entrada no sinal de saída
Sistema: sinal de entrada sinal de saída
Diagrama de blocos:
Representação:
sinal de entrada é o sinal que o “exterior” impõe ao sistema
sinal de saída é o sinal que o sistema impõe ao “exterior”
SS 0809SinSist2 18
Faculdade de EngenhariaSistemas em tempo contínuo e em tempo discreto
Sistemas em tempo contínuo � entrada e saída são sinais em tempo contínuo
x(t)S
cont
y(t))()(: tytxScont →
Sistemas em tempo discreto � entrada e saída são sinais em tempo discreto
x[n]S
dis
y[n]][][: nynxSdis →
10
SS 0809SinSist2 19
Faculdade de EngenhariaSistemas – exemplo
Movimento longitudinal de um veículo (modelo simplificado)
entrada: força produzida pelo motor:
saída: velocidade:
)(tf
)(tv
relação entrada-saída: )()()( 2
tcvtfdt
tdvm −=
resistência do ar e atrito
)()()( 2
tftcvdt
tdvm =+ equação diferencial
)(tv
SS 0809SinSist2 20
Faculdade de EngenhariaSistemas – exemplo
Evolução do saldo de uma conta bancária
entrada: montante líquido (depósitos – levantamentos) depositado durante o mês n:
saída: saldo da conta no fim do mês n:
][nx
][ny
relação entrada-saída: ][]1[]1[][ nxnyanyny +−+−=
taxa de juro mensal
][]1[)1(][ nxnyany =−+− equação às diferenças
11
SS 0809SinSist2 21
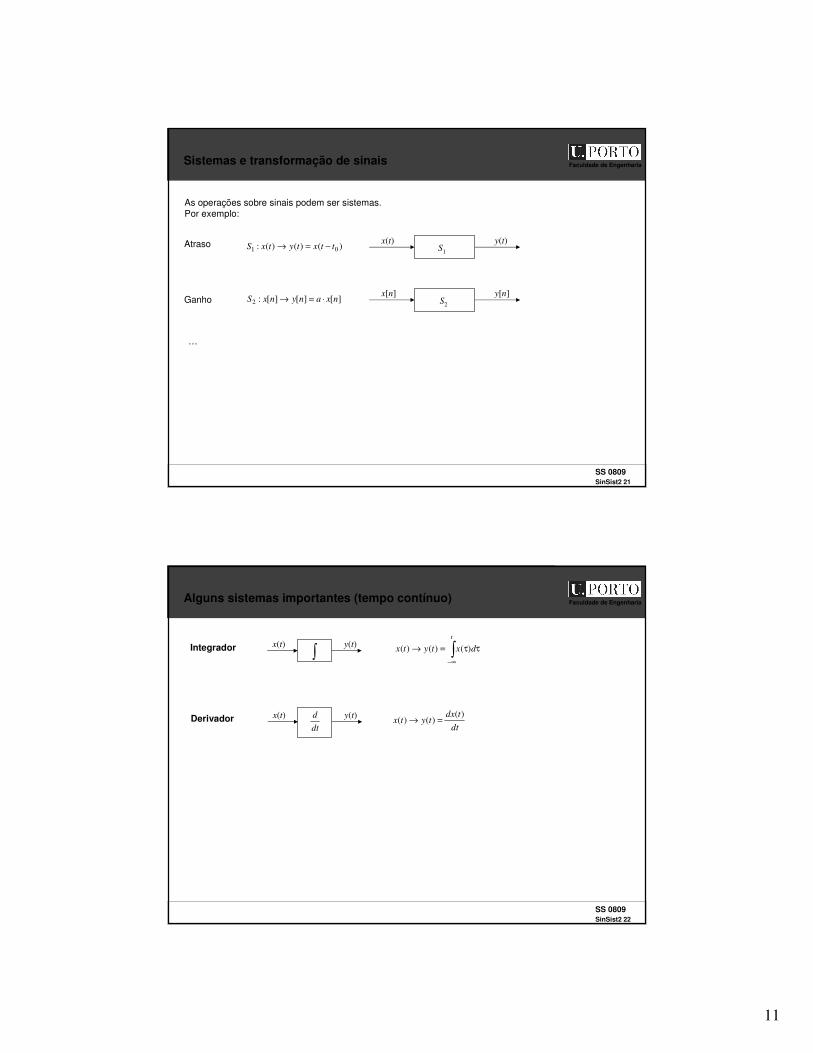
Faculdade de EngenhariaSistemas e transformação de sinais
As operações sobre sinais podem ser sistemas. Por exemplo:
Atraso x(t)S1
y(t))()()(: 01 ttxtytxS −=→
Ganhox[n]
S2
y[n]][][][:2 nxanynxS ⋅=→
…
SS 0809SinSist2 22
Faculdade de EngenhariaAlguns sistemas importantes (tempo contínuo)
Integrador �∞−
ττ=→
t
dxtytx )()()(x(t) y(t)
�
Derivadordt
tdxtytx
)()()( =→
x(t) y(t)
dt
d

12
SS 0809SinSist2 23
Faculdade de EngenhariaAlguns sistemas importantes (tempo discreto)
Acumulador �−∞=
=→n
k
kxnynx ][][][
Atraso unitário
x[n]�
y[n]
∆x[n] y[n] ]1[][][ −=→ nxnynx
SS 0809SinSist2 24
Faculdade de EngenhariaExercício 1
Considere o sistema integrador )()(: tytxS →
e determine e esboce y(t) quando:
a)
b)
c)
)1(2)1()( −δ−+δ= tttx
)1()2()( −−+= tututx
x(t) é o sinal
t0
1
)(tx
1
13
SS 0809SinSist2 25
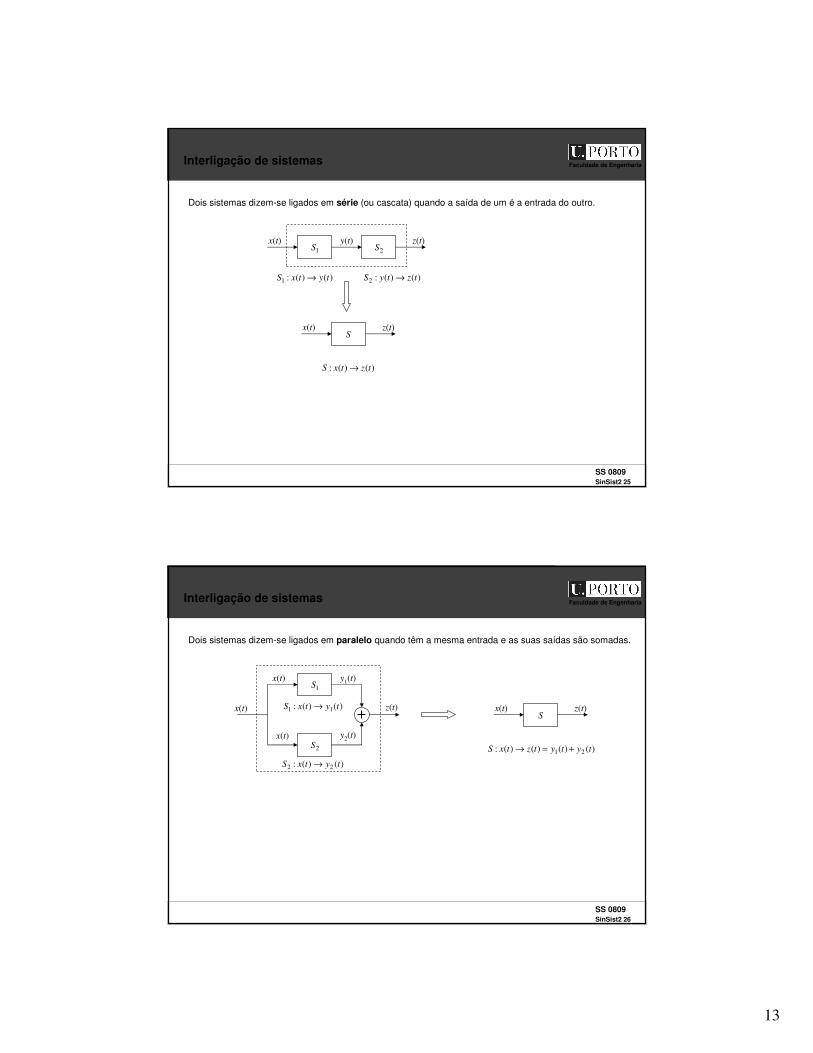
Faculdade de EngenhariaInterligação de sistemas
Dois sistemas dizem-se ligados em série (ou cascata) quando a saída de um é a entrada do outro.
)()(:1 tytxS → )()(:2 tztyS →
x(t)S
z(t)
)()(: tztxS →
2Sz(t)y(t)
1Sx(t)
SS 0809SinSist2 26
Faculdade de EngenhariaInterligação de sistemas
Dois sistemas dizem-se ligados em paralelo quando têm a mesma entrada e as suas saídas são somadas.
x(t) y1(t)1S
z(t))()(: 11 tytxS →
)()(: 22 tytxS →
x(t)S
z(t)
x(t)
2Sy2(t)
x(t)
)()()()(: 21 tytytztxS +=→
14
SS 0809SinSist2 27
Faculdade de EngenhariaInterligação de sistemas
• De forma análoga se definem ligações em série e em paralelo de sistemas em tempo discreto
• As ligações em série e em pararelo podem combinar-se criando associações mais complexas, no
entanto a análise de uma associação mais complexa reduz-se à consideração sucessiva de
associações elementares
• O agrupamento/desagrupamento de sistemas associados permite criar diferentes graus de
abstracção sobre um sistema complexo
SS 0809SinSist2 28
Faculdade de EngenhariaPropriedades de sistemas – memória
Um sistema diz-se sem memória se para cada instante, o valor da saída nesse instante apenasdepender do valor da entrada no mesmo instante.
Exemplos: 1][3][][][: 21 +−=→ nxnxnynxS
( ))(1log3)()(: 22 txtytxS +=→
Se a condição acima não se verificar, o sistema diz-se com memória.
Exemplos: ]1[][][:3 +=→ nxnynxS
�∞−
ττ=→
t
dxtytxS )()()(:4
Neste caso haverá, pelo menos, um instante para o qual o valor da saída nesse instante dependerá de valores da entrada em instantes passados ou futuros.
15
SS 0809SinSist2 29
Faculdade de EngenhariaPropriedades de sistemas – invertibilidade
Um sistema diz-se invertível se diferentes sinais de entrada conduzem a diferentes sinais de saída.
Exemplos: )(2)()(:1 txtytxS =→
�−∞=
=→n
k
kxnynxS ][][][:2
Exemplos:
]1[][][][:4 −−=→ nxnxnynxS
)1()()(: 23 −=→ txtytxS
Nota: dois sinais são diferentes, se existir pelo menos um instante de tempo em que tomam valores diferentes, ou seja, são iguais se e apenas se tomarem valores iguais em todos os instantes de tempo.
Um sistema diz-se não invertível se existirem pelo menos dois sinais de entrada diferentes queconduzam ao mesmo sinal de saída.
SS 0809SinSist2 30
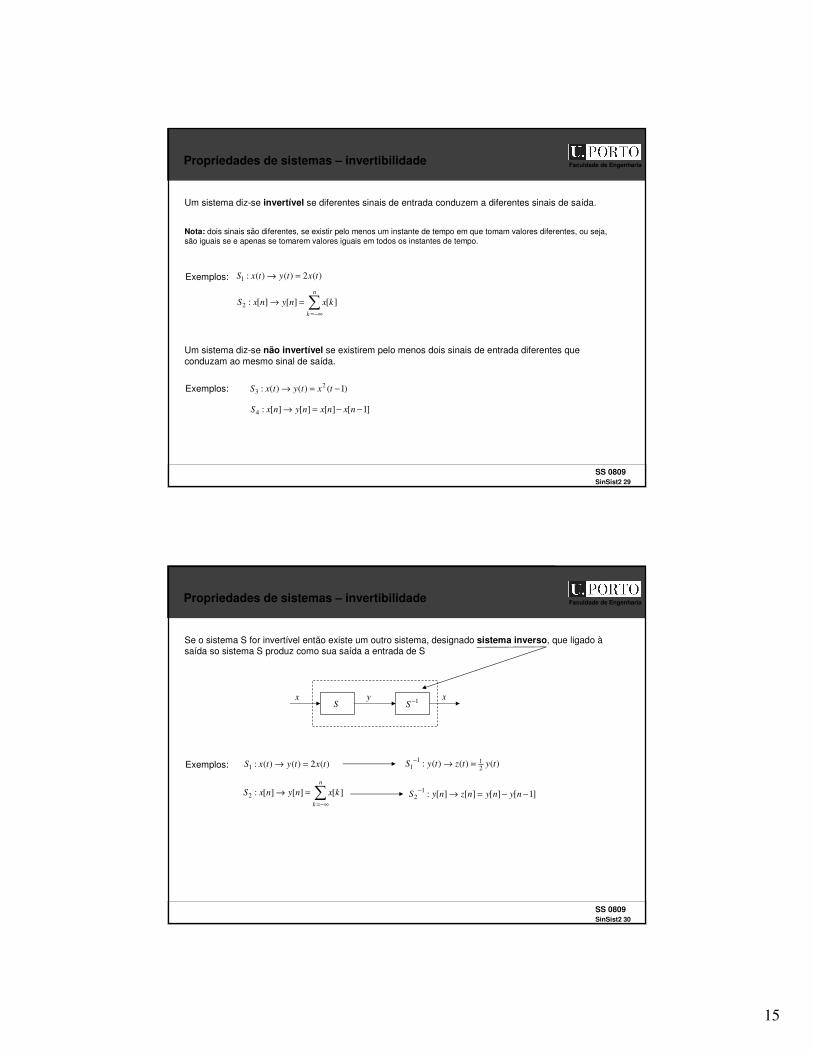
Faculdade de EngenhariaPropriedades de sistemas – invertibilidade
Se o sistema S for invertível então existe um outro sistema, designado sistema inverso, que ligado àsaída so sistema S produz como sua saída a entrada de S
Exemplos: )(2)()(:1 txtytxS =→
�−∞=
=→n
k
kxnynxS ][][][:2
x yS 1−
Sx
)()()(:211
1 tytztyS =→−
]1[][][][:1
2 −−=→−
nynynznyS
16
SS 0809SinSist2 31
Faculdade de EngenhariaPropriedades de sistemas – causalidade
Um sistema diz-se causal, ou não antecipativo, se para cada instante, o valor da saída nesse instanteapenas depender do valor da entrada no mesmo instante ou em instantes passados.
Exemplos: �−∞=
=→n
k
kxnynxS ][][][:1
)3()()(:2 −=→ txtytxS
Neste caso haverá, pelo menos, um instante para o qual o valor da saída nesse instante dependerá de valores da entrada em instantes futuros.
Exemplos: ][][][:3 nxnynxS −=→
0,][12
1][][:4 >−
+=→ �
−=
MknxM
nynxS
M
Mk
Se a condição acima não se verificar, o sistema diz-se não causal, ou antecipativo.
SS 0809SinSist2 32
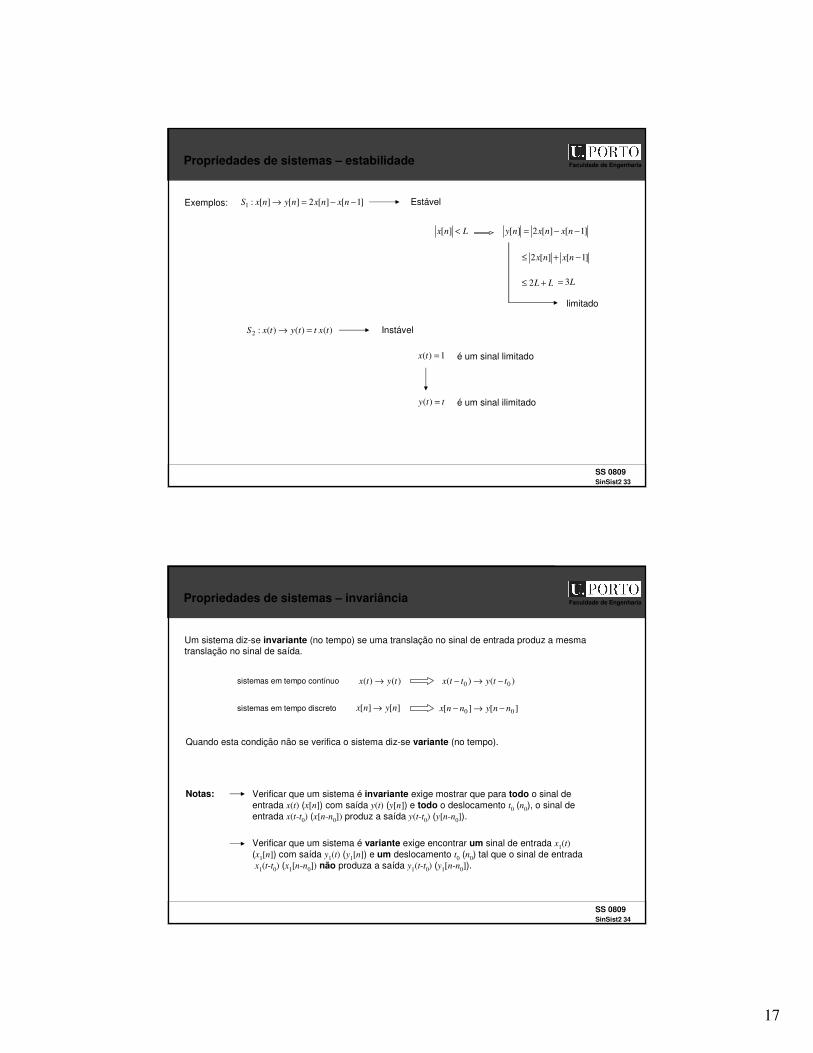
Faculdade de EngenhariaPropriedades de sistemas – estabilidade
Um sistema diz-se estável se entradas limitadas derem origem a saídas limitadas.
Notas:
Verificar que um sistema é estável exige mostrar que todas as entradaslimitadas produzem saídas limitadas.
Verificar que um sistema é instável exige encontrar uma entrada limitada queproduza uma saída ilimitada.
O sinal x(t) diz-se limitado se LtxtL <∀>∃ )(0
O sinal x[n] diz-se limitado se LnxnL <∀>∃ ][0
Quando esta condição não se verifica o sistema diz-se instável.
17
SS 0809SinSist2 33
Faculdade de EngenhariaPropriedades de sistemas – estabilidade
Exemplos:
Lnx <][
]1[][2][][:1 −−=→ nxnxnynxS Estável
]1[][2][ −−= nxnxny
]1[][2 −+≤ nxnx
LL +≤ 2 L3=
limitado
)()()(:2 txttytxS =→ Instável
1)( =tx é um sinal limitado
tty =)( é um sinal ilimitado
SS 0809SinSist2 34
Faculdade de EngenhariaPropriedades de sistemas – invariância
Um sistema diz-se invariante (no tempo) se uma translação no sinal de entrada produz a mesmatranslação no sinal de saída.
Notas: Verificar que um sistema é invariante exige mostrar que para todo o sinal de entrada x(t) (x[n]) com saída y(t) (y[n]) e todo o deslocamento t0 (n0), o sinal de entrada x(t-t0) (x[n-n0]) produz a saída y(t-t0) (y[n-n0]).
Quando esta condição não se verifica o sistema diz-se variante (no tempo).
sistemas em tempo contínuo )()( tytx → )()( 00 ttyttx −→−
sistemas em tempo discreto ][][ nynx → ][][ 00 nnynnx −→−
Verificar que um sistema é variante exige encontrar um sinal de entrada x1(t)
(x1[n]) com saída y1(t) (y1[n]) e um deslocamento t0 (n0) tal que o sinal de entradax1(t-t0) (x1[n-n0]) não produza a saída y1(t-t0) (y1[n-n0]).
18
SS 0809SinSist2 35
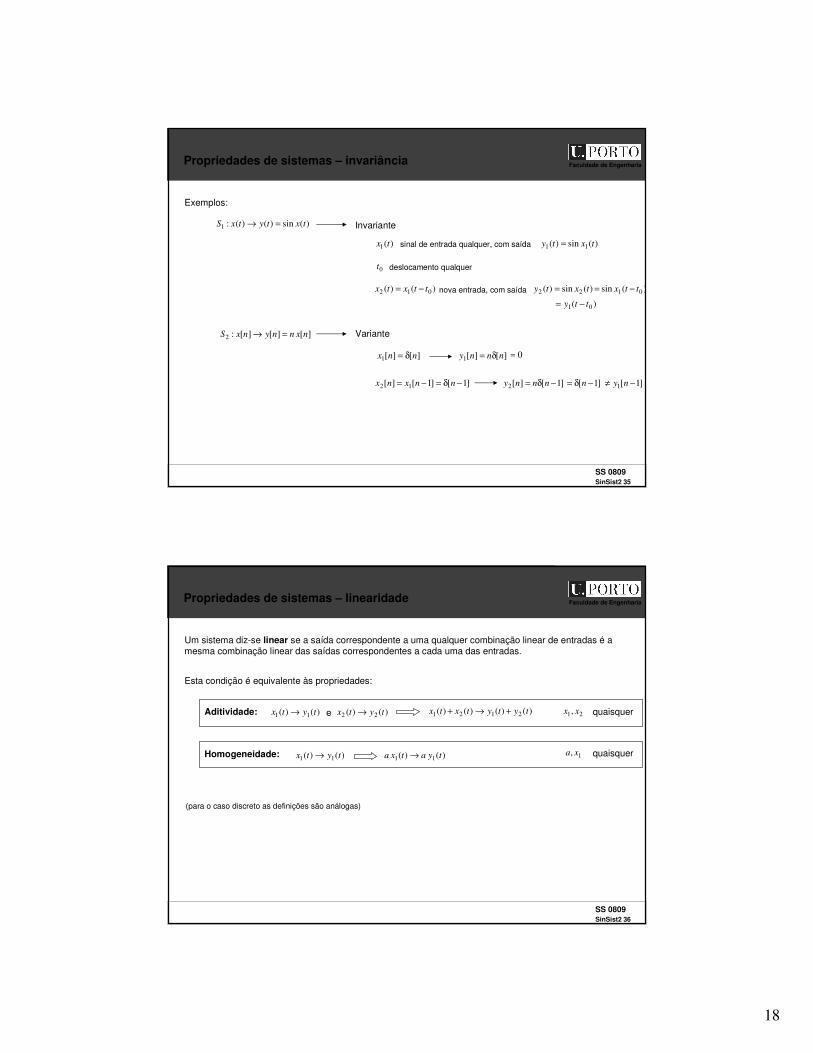
Faculdade de EngenhariaPropriedades de sistemas – invariância
Exemplos:
)(sin)()(:1 txtytxS =→ Invariante
][][][:2 nxnnynxS =→ Variante
][][1 nnx δ=
sinal de entrada qualquer, com saída )(sin)( 11 txty =
0t deslocamento qualquer
)()( 012 ttxtx −= nova entrada, com saída )(sin)( 22 txty = )(sin 01 ttx −=
)( 01 tty −=
][][1 nnny δ=
)(1 tx
]1[]1[][ 12 −δ=−= nnxnx ]1[][2 −δ= nnny
0=
]1[ −δ= n ]1[1 −≠ ny
SS 0809SinSist2 36
Faculdade de EngenhariaPropriedades de sistemas – linearidade
Um sistema diz-se linear se a saída correspondente a uma qualquer combinação linear de entradas é a mesma combinação linear das saídas correspondentes a cada uma das entradas.
(para o caso discreto as definições são análogas)
Esta condição é equivalente às propriedades:
Aditividade: )()( 11 tytx → e )()( 22 tytx → )()()()( 2121 tytytxtx +→+ 21, xx quaisquer
Homogeneidade: )()( 11 tyatxa →)()( 11 tytx → 1, xa quaisquer
19
SS 0809SinSist2 37
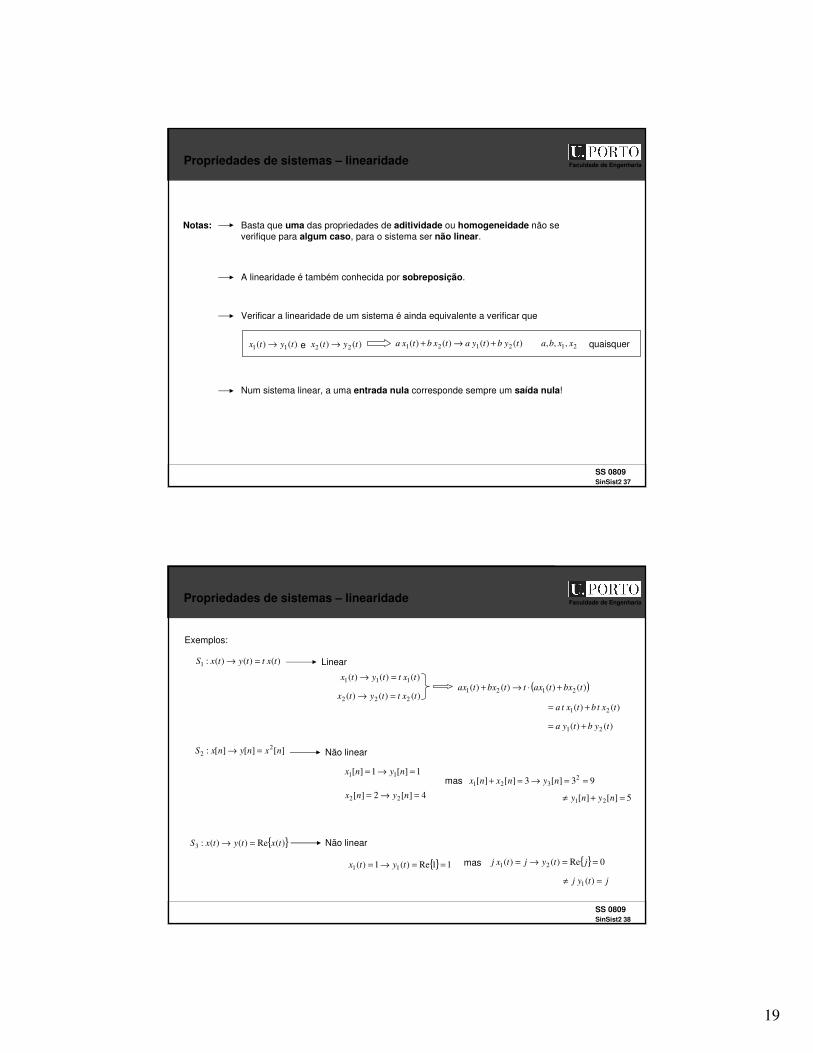
Faculdade de EngenhariaPropriedades de sistemas – linearidade
A linearidade é também conhecida por sobreposição.
Num sistema linear, a uma entrada nula corresponde sempre um saída nula!
Notas: Basta que uma das propriedades de aditividade ou homogeneidade não se verifique para algum caso, para o sistema ser não linear.
Verificar a linearidade de um sistema é ainda equivalente a verificar que
)()( 11 tytx → e )()( 22 tytx → )()()()( 2121 tybtyatxbtxa +→+ 21,,, xxba quaisquer
SS 0809SinSist2 38
Faculdade de EngenhariaPropriedades de sistemas – linearidade
Exemplos:
)()()(:1 txttytxS =→ Linear
][][][: 22 nxnynxS =→ Não linear
5][][ 21 =+≠ nyny
)()( 21 txtbtxta +=
)()()( 111 txttytx =→
)()()( 222 txttytx =→( ))()()()( 2121 tbxtaxttbxtax +⋅→+
)()( 21 tybtya +=
1][1][ 11 =→= nynx
4][2][ 22 =→= nynx
93][3][][ 2321 ==→=+ nynxnx
{ })(Re)()(:3 txtytxS =→ Não linear
{ } 11Re)(1)( 11 ==→= tytx
mas
{ } 0Re)()( 21 ==→= jtyjtxjmas
jtyj =≠ )(1
20
SS 0809SinSist2 39
Faculdade de EngenhariaExercício 2
a) Determine e esboce o módulo e a fase do sinal tjtjeetx
32)( +=
12/2][ π= njenxi)
b) Verifique se cada um dos sinais é periódico e em caso afirmativo determine o seu período fundamental:
ii) )31/8cos(][ nny π=
iii) )6cos(][ nnz =
iv) nnw )1(][ −=
SS 0809SinSist2 40
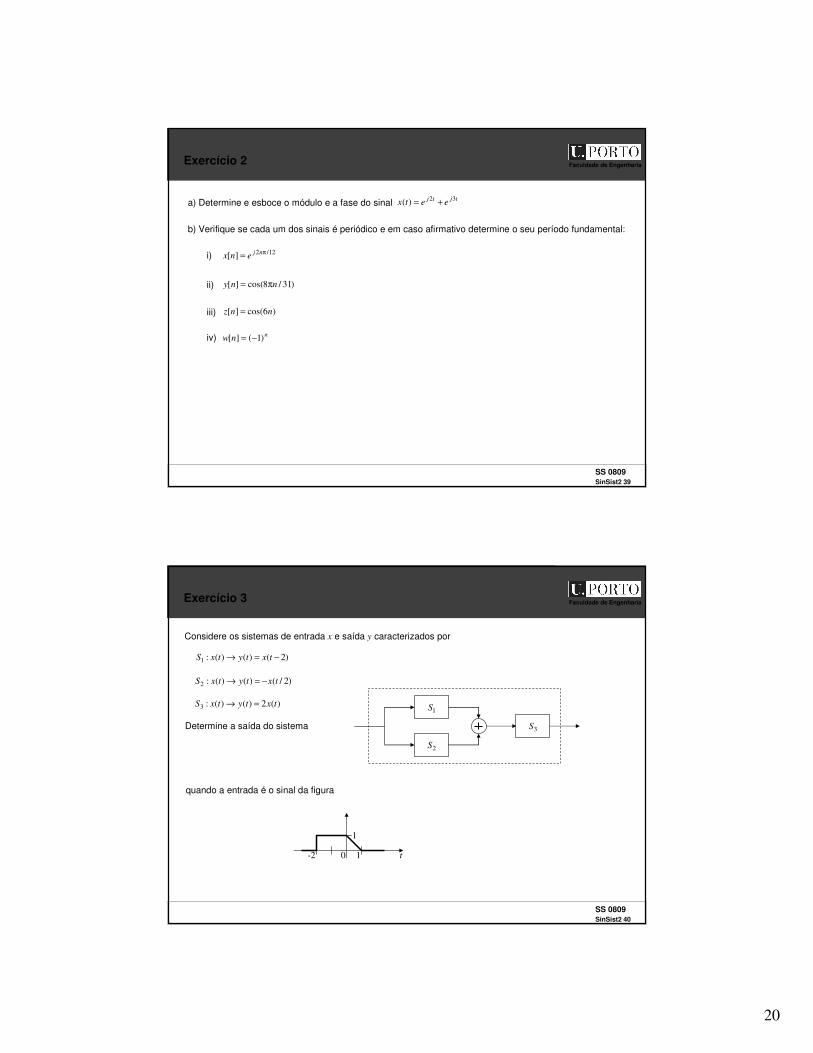
Faculdade de EngenhariaExercício 3
Considere os sistemas de entrada x e saída y caracterizados por
)2()()(:1 −=→ txtytxS
)2/()()(:2 txtytxS −=→
)(2)()(:3 txtytxS =→
Determine a saída do sistema
1S
2S
3S
quando a entrada é o sinal da figura
t0
1
1-2
21
SS 0809SinSist2 41
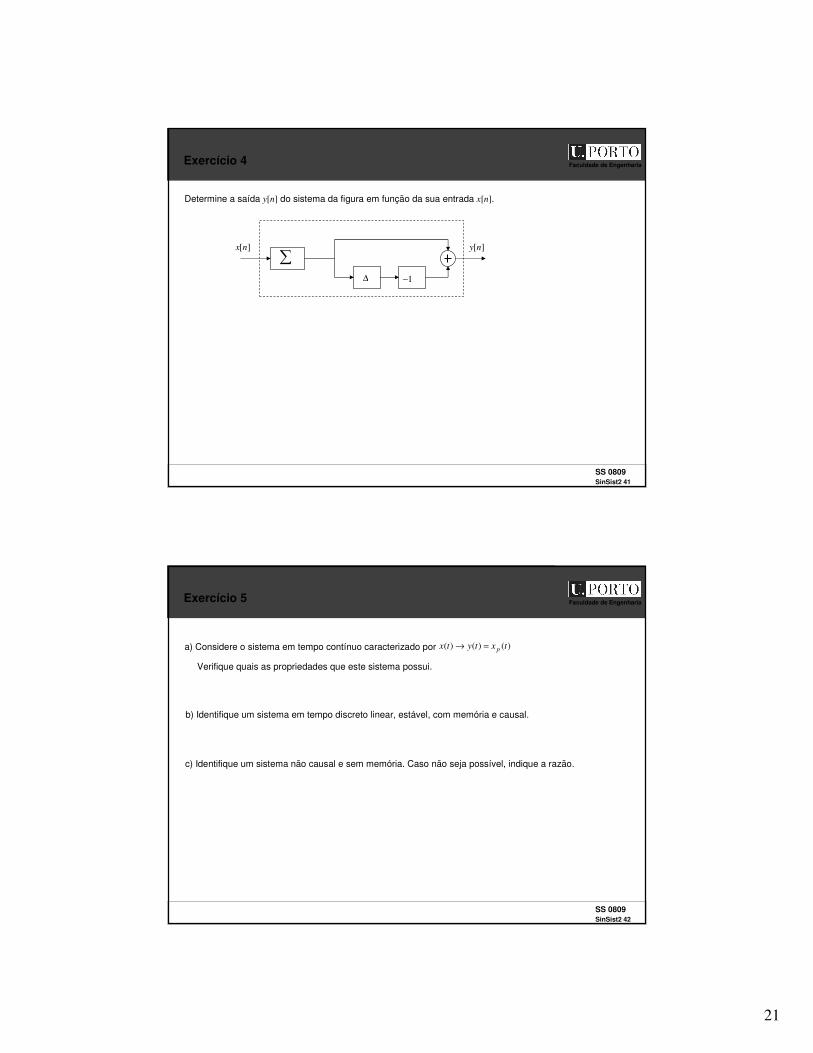
Faculdade de EngenhariaExercício 4
Determine a saída y[n] do sistema da figura em função da sua entrada x[n].
∆
][ny
�1−
][nx
SS 0809SinSist2 42
Faculdade de EngenhariaExercício 5
a) Considere o sistema em tempo contínuo caracterizado por )()()( txtytx p=→
Verifique quais as propriedades que este sistema possui.
b) Identifique um sistema em tempo discreto linear, estável, com memória e causal.
c) Identifique um sistema não causal e sem memória. Caso não seja possível, indique a razão.


















