
Simulation Reduction of Finite Nondeterministic Word and...
43
Simulation Reduction of Finite Nondeterministic Word and Tree Automata Tomáš Vojnar FIT, Brno University of Technology, Czech Republic Simulation Reduction of NFA and NTA– p.1/20
-
Upload
phungtuong -
Category
Documents
-
view
215 -
download
0
Transcript of Simulation Reduction of Finite Nondeterministic Word and...

Simulation Reduction of FiniteNondeterministic Word and Tree Automata
Tomáš VojnarFIT, Brno University of Technology, Czech Republic
Simulation Reduction of NFA and NTA – p.1/20

Plan of the Lecture
❖ Mediated Simulation Reduction for Finite Word Automata
❖ Simulation-based Reduction of Finite Tree Automata
❖ Computing Simulations on Tree Automata and Labelled Transition Systems
Simulation Reduction of NFA and NTA – p.2/20
Mediated Simulation Reductionfor Finite Word Automata
Simulation Reduction of NFA and NTA – p.3/20

How to reduce NFA?
❖ Computing minimal deterministic automata is not a good way:
• requires determinisation – costly, may run out of memory even before one canbegin with the actual minimisation,
• the result can still be bigger than the original nondeterministic automaton.
Simulation Reduction of NFA and NTA – p.4/20
How to reduce NFA?
❖ Computing minimal deterministic automata is not a good way:
• requires determinisation – costly, may run out of memory even before one canbegin with the actual minimisation,
• the result can still be bigger than the original nondeterministic automaton.
❖ A well-known way of reducing the size of nondeterministic automata withoutdeterminizing them is quotienting w.r.t. forward/backward (bi)simulation equivalence.
Simulation Reduction of NFA and NTA – p.4/20

Simulation-based NFA Reduction
❖ Forward simulation F for word automata:
• qFr implies that
– if q a−→ q′, then r
a−→ r′ with q′Fr′, and
– q ∈ F =⇒ r ∈ F where F are the final states.
• F implies inclusion of languages accepted from states.
Simulation Reduction of NFA and NTA – p.5/20

Simulation-based NFA Reduction
❖ Forward simulation F for word automata:
• qFr implies that
– if q a−→ q′, then r
a−→ r′ with q′Fr′, and
– q ∈ F =⇒ r ∈ F where F are the final states.
• F implies inclusion of languages accepted from states.
❖ Backward simulation B for word automata:
• qBr implies that
– if q′ a−→ q, then r′
a−→ r with q′Br′, and
– q ∈ I =⇒ r ∈ I where I are the initial states.
• B implies inclusion of languages accepted at states.
Simulation Reduction of NFA and NTA – p.5/20
Simulation-based NFA Reduction
❖ Forward simulation F for word automata:
• qFr implies that
– if q a−→ q′, then r
a−→ r′ with q′Fr′, and
– q ∈ F =⇒ r ∈ F where F are the final states.
• F implies inclusion of languages accepted from states.
❖ Backward simulation B for word automata:
• qBr implies that
– if q′ a−→ q, then r′
a−→ r with q′Br′, and
– q ∈ I =⇒ r ∈ I where I are the initial states.
• B implies inclusion of languages accepted at states.
❖ A simulation S is a pre-order (reflexive and transitive). For quotienting, one needsa simulation equivalence, which can be obtained by taking the symmetric closure S ∩S−1.
Simulation Reduction of NFA and NTA – p.5/20
Bisimulation-based NFA Reduction
❖ One can also quotient wrt. forward/backward bisimulations.
• Forward bisimulation F for word automata:– qFr implies that
◦ if q a−→ q′, then r
a−→ r′ with q′Fr′,
◦ symmetrically, if r a−→ r′, then q
a−→ q′ with q′Fr′, and
◦ q ∈ F ⇔ r ∈ F .
• Backward simulation B for word automata:– qBr implies that
◦ if q′ a−→ q, then r′
a−→ r with q′Br′,
◦ symmetrically, if r′ a−→ r, then q′
a−→ q with q′Br′, and
◦ q ∈ I ⇔ r ∈ I.
Simulation Reduction of NFA and NTA – p.6/20
Bisimulation-based NFA Reduction
❖ One can also quotient wrt. forward/backward bisimulations.
• Forward bisimulation F for word automata:– qFr implies that
◦ if q a−→ q′, then r
a−→ r′ with q′Fr′,
◦ symmetrically, if r a−→ r′, then q
a−→ q′ with q′Fr′, and
◦ q ∈ F ⇔ r ∈ F .
• Backward simulation B for word automata:– qBr implies that
◦ if q′ a−→ q, then r′
a−→ r with q′Br′,
◦ symmetrically, if r′ a−→ r, then q′
a−→ q with q′Br′, and
◦ q ∈ I ⇔ r ∈ I.
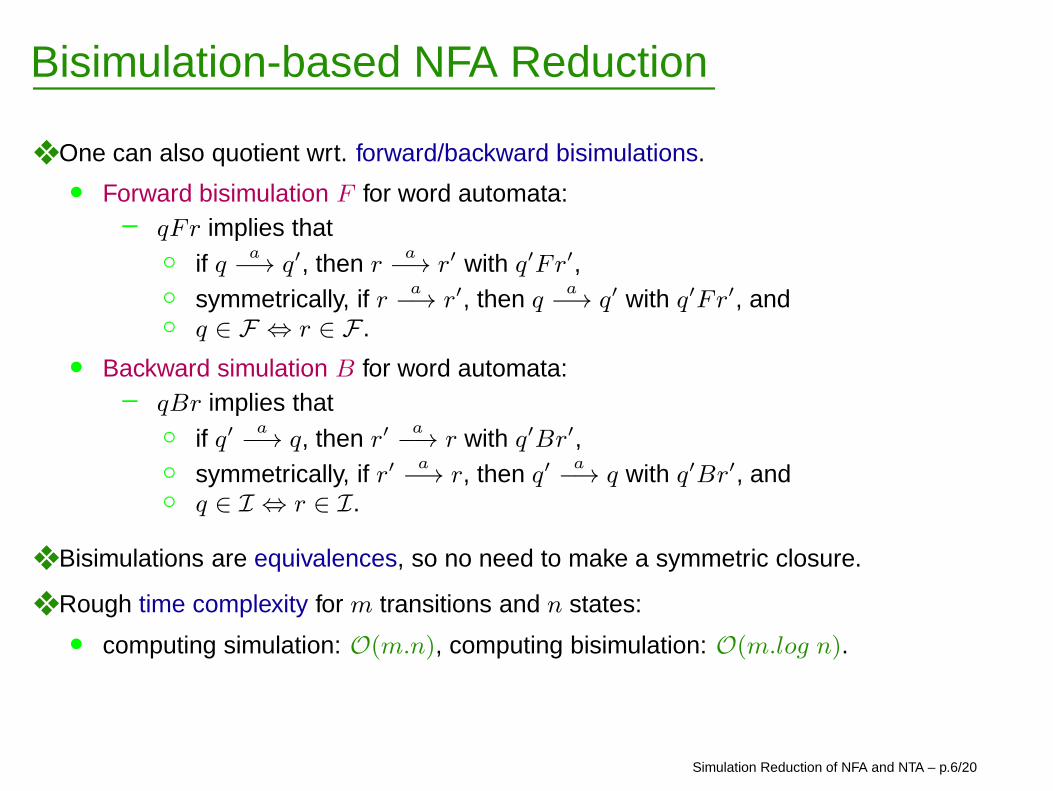
❖ Bisimulations are equivalences, so no need to make a symmetric closure.
❖ Rough time complexity for m transitions and n states:
• computing simulation: O(m.n), computing bisimulation: O(m.log n).
Simulation Reduction of NFA and NTA – p.6/20

Bisimulation-based NFA Reduction
❖ One can also quotient wrt. forward/backward bisimulations.
• Forward bisimulation F for word automata:– qFr implies that
◦ if q a−→ q′, then r
a−→ r′ with q′Fr′,
◦ symmetrically, if r a−→ r′, then q
a−→ q′ with q′Fr′, and
◦ q ∈ F ⇔ r ∈ F .
• Backward simulation B for word automata:– qBr implies that
◦ if q′ a−→ q, then r′
a−→ r with q′Br′,
◦ symmetrically, if r′ a−→ r, then q′
a−→ q with q′Br′, and
◦ q ∈ I ⇔ r ∈ I.
❖ Bisimulations are equivalences, so no need to make a symmetric closure.
❖ Rough time complexity for m transitions and n states:
• computing simulation: O(m.n), computing bisimulation: O(m.log n).
❖ The use of forward and backward (bi)simulation can be efficiently combined in coarser(and hence better reducing) mediated equivalences.
Simulation Reduction of NFA and NTA – p.6/20
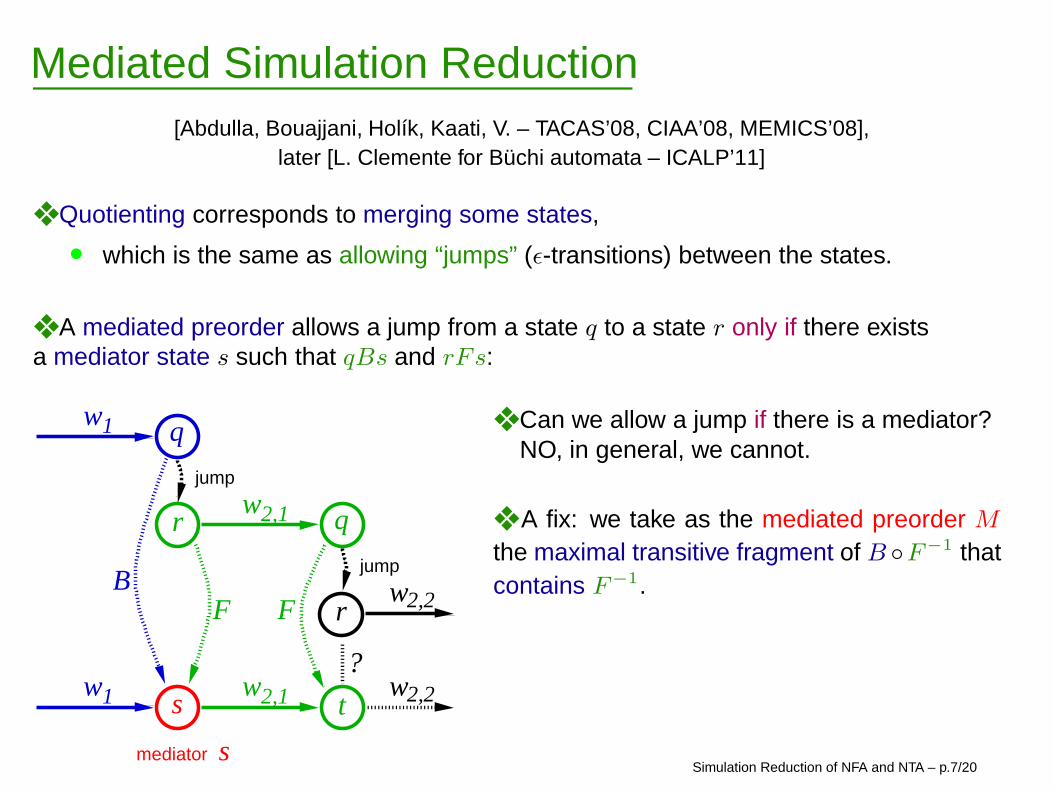
Mediated Simulation Reduction[Abdulla, Bouajjani, Holík, Kaati, V. – TACAS’08, CIAA’08, MEMICS’08],
later [L. Clemente for Büchi automata – ICALP’11]
❖ Quotienting corresponds to merging some states,
• which is the same as allowing “jumps” (ǫ-transitions) between the states.
Simulation Reduction of NFA and NTA – p.7/20

Mediated Simulation Reduction[Abdulla, Bouajjani, Holík, Kaati, V. – TACAS’08, CIAA’08, MEMICS’08],
later [L. Clemente for Büchi automata – ICALP’11]
❖ Quotienting corresponds to merging some states,
• which is the same as allowing “jumps” (ǫ-transitions) between the states.
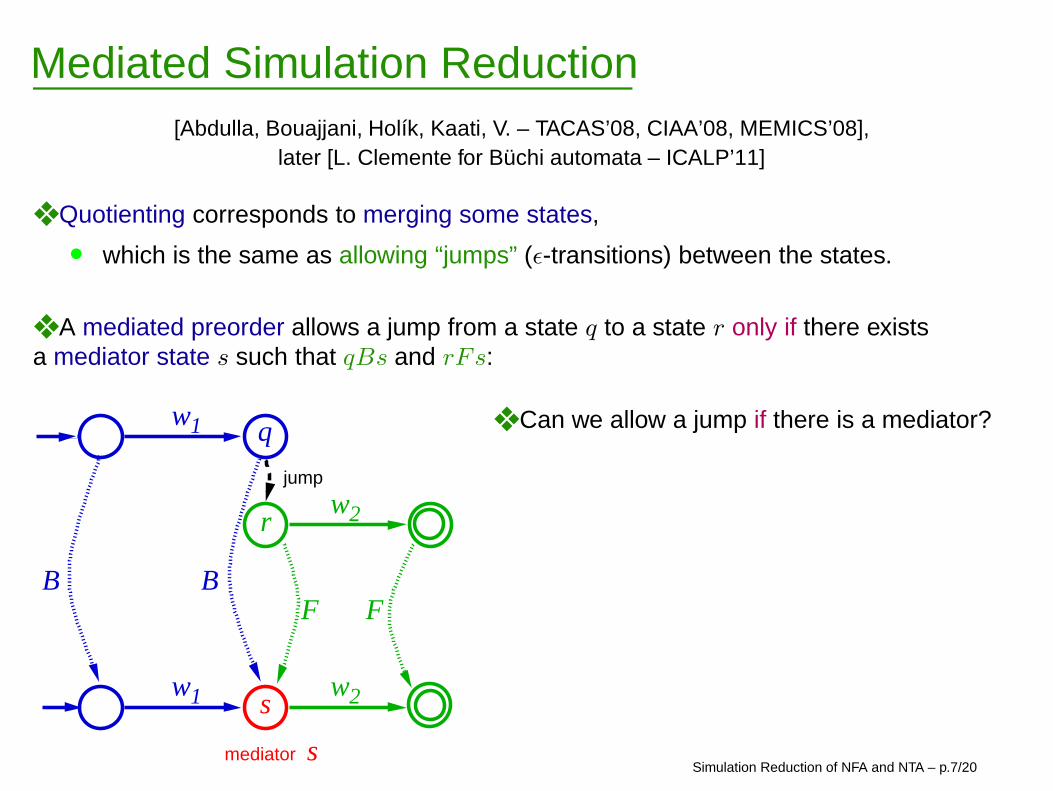
❖ A mediated preorder allows a jump from a state q to a state r only if there existsa mediator state s such that qBs and rFs:
Simulation Reduction of NFA and NTA – p.7/20

Mediated Simulation Reduction[Abdulla, Bouajjani, Holík, Kaati, V. – TACAS’08, CIAA’08, MEMICS’08],
later [L. Clemente for Büchi automata – ICALP’11]
❖ Quotienting corresponds to merging some states,
• which is the same as allowing “jumps” (ǫ-transitions) between the states.
❖ A mediated preorder allows a jump from a state q to a state r only if there existsa mediator state s such that qBs and rFs:
jump
FF
w2
w2
w1
w1
B
q
s
r
s mediator
B
Simulation Reduction of NFA and NTA – p.7/20
Mediated Simulation Reduction[Abdulla, Bouajjani, Holík, Kaati, V. – TACAS’08, CIAA’08, MEMICS’08],
later [L. Clemente for Büchi automata – ICALP’11]
❖ Quotienting corresponds to merging some states,
• which is the same as allowing “jumps” (ǫ-transitions) between the states.
❖ A mediated preorder allows a jump from a state q to a state r only if there existsa mediator state s such that qBs and rFs:
jump
FF
w2
w2
w1
w1
B
q
s
r
s mediator
B
❖ Can we allow a jump if there is a mediator?
Simulation Reduction of NFA and NTA – p.7/20
Mediated Simulation Reduction[Abdulla, Bouajjani, Holík, Kaati, V. – TACAS’08, CIAA’08, MEMICS’08],
later [L. Clemente for Büchi automata – ICALP’11]
❖ Quotienting corresponds to merging some states,
• which is the same as allowing “jumps” (ǫ-transitions) between the states.
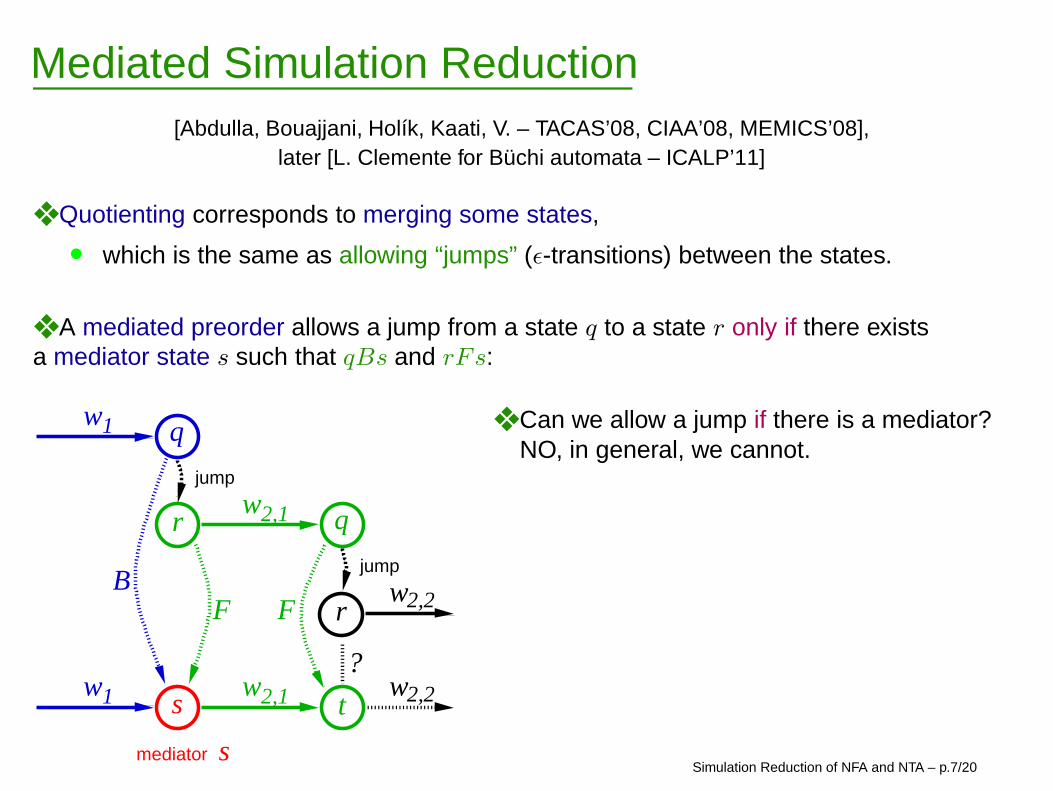
❖ A mediated preorder allows a jump from a state q to a state r only if there existsa mediator state s such that qBs and rFs:
jump
jump
FF
wq
wt
w1
w1
B
q
s
r
r
s mediator
2,1
2,1
w2,2
2,2w?
❖ Can we allow a jump if there is a mediator?NO, in general, we cannot.
Simulation Reduction of NFA and NTA – p.7/20
Mediated Simulation Reduction[Abdulla, Bouajjani, Holík, Kaati, V. – TACAS’08, CIAA’08, MEMICS’08],
later [L. Clemente for Büchi automata – ICALP’11]
❖ Quotienting corresponds to merging some states,
• which is the same as allowing “jumps” (ǫ-transitions) between the states.
❖ A mediated preorder allows a jump from a state q to a state r only if there existsa mediator state s such that qBs and rFs:
jump
jump
FF
wq
wt
w1
w1
B
q
s
r
r
s mediator
2,1
2,1
w2,2
2,2w?
❖ Can we allow a jump if there is a mediator?NO, in general, we cannot.
❖ A fix: we take as the mediated preorder Mthe maximal transitive fragment of B ◦F−1 thatcontains F−1.
Simulation Reduction of NFA and NTA – p.7/20

Mediated Simulation Reduction[Abdulla, Bouajjani, Holík, Kaati, V. – TACAS’08, CIAA’08, MEMICS’08],
later [L. Clemente for Büchi automata – ICALP’11]
❖ Quotienting corresponds to merging some states,
• which is the same as allowing “jumps” (ǫ-transitions) between the states.
❖ A mediated preorder allows a jump from a state q to a state r only if there existsa mediator state s such that qBs and rFs:
jump
q
jump
w1 q
wr
FM
w1 sw
wr
t
M2,1
2,2
?2,1
❖ Can we allow a jump if there is a mediator?NO, in general, we cannot.
❖ A fix: we take as the mediated preorder Mthe maximal transitive fragment of B ◦F−1 thatcontains F−1.
Simulation Reduction of NFA and NTA – p.7/20

Mediated Simulation Reduction[Abdulla, Bouajjani, Holík, Kaati, V. – TACAS’08, CIAA’08, MEMICS’08],
later [L. Clemente for Büchi automata – ICALP’11]
❖ Quotienting corresponds to merging some states,
• which is the same as allowing “jumps” (ǫ-transitions) between the states.
❖ A mediated preorder allows a jump from a state q to a state r only if there existsa mediator state s such that qBs and rFs:
jump
q
jump
w1 q
wr
M
M
w1 sw
wr
t
M2,1
2,2
MF
2,1
❖ Can we allow a jump if there is a mediator?NO, in general, we cannot.
❖ A fix: we take as the mediated preorder Mthe maximal transitive fragment of B ◦F−1 thatcontains F−1.
Simulation Reduction of NFA and NTA – p.7/20

Mediated Simulation Reduction[Abdulla, Bouajjani, Holík, Kaati, V. – TACAS’08, CIAA’08, MEMICS’08],
later [L. Clemente for Büchi automata – ICALP’11]
❖ Quotienting corresponds to merging some states,
• which is the same as allowing “jumps” (ǫ-transitions) between the states.
❖ A mediated preorder allows a jump from a state q to a state r only if there existsa mediator state s such that qBs and rFs:
jump
q
jump
w1 q
wr
M
M
w1 sw
wr
t
M2,1
2,2
MF
2,1
❖ Can we allow a jump if there is a mediator?NO, in general, we cannot.
❖ A fix: we take as the mediated preorder Mthe maximal transitive fragment of B ◦F−1 thatcontains F−1.
❖ We can merge states according to themediated equivalence ∼M = M ∩M−1.
Simulation Reduction of NFA and NTA – p.7/20

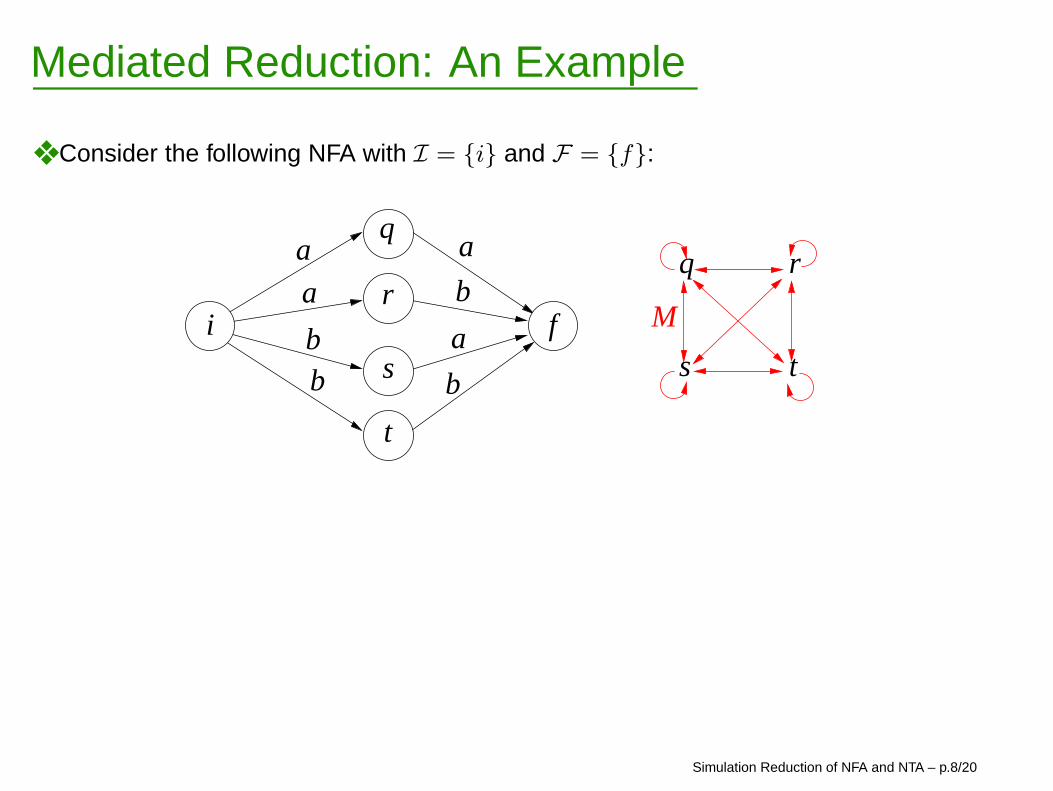
Mediated Reduction: An Example
❖ Consider the following NFA with I = {i} and F = {f}:
bb
b
a
a a
a
br
q
i f
t
s
Simulation Reduction of NFA and NTA – p.8/20

Mediated Reduction: An Example
❖ Consider the following NFA with I = {i} and F = {f}:
bbb
a
a a
a
bq r
s t
B
r
q
i f
t
s
Simulation Reduction of NFA and NTA – p.8/20

Mediated Reduction: An Example
❖ Consider the following NFA with I = {i} and F = {f}:
bbb
a
a a
a
bq r
s t
F
B
r
q
i f
t
s
Simulation Reduction of NFA and NTA – p.8/20
Mediated Reduction: An Example
❖ Consider the following NFA with I = {i} and F = {f}:
bbb
a
a a
a
bq r
s t
Mr
q
i f
t
s
Simulation Reduction of NFA and NTA – p.8/20
Mediated Simulation Reductionfor Finite Tree Automata
Simulation Reduction of NFA and NTA – p.9/20

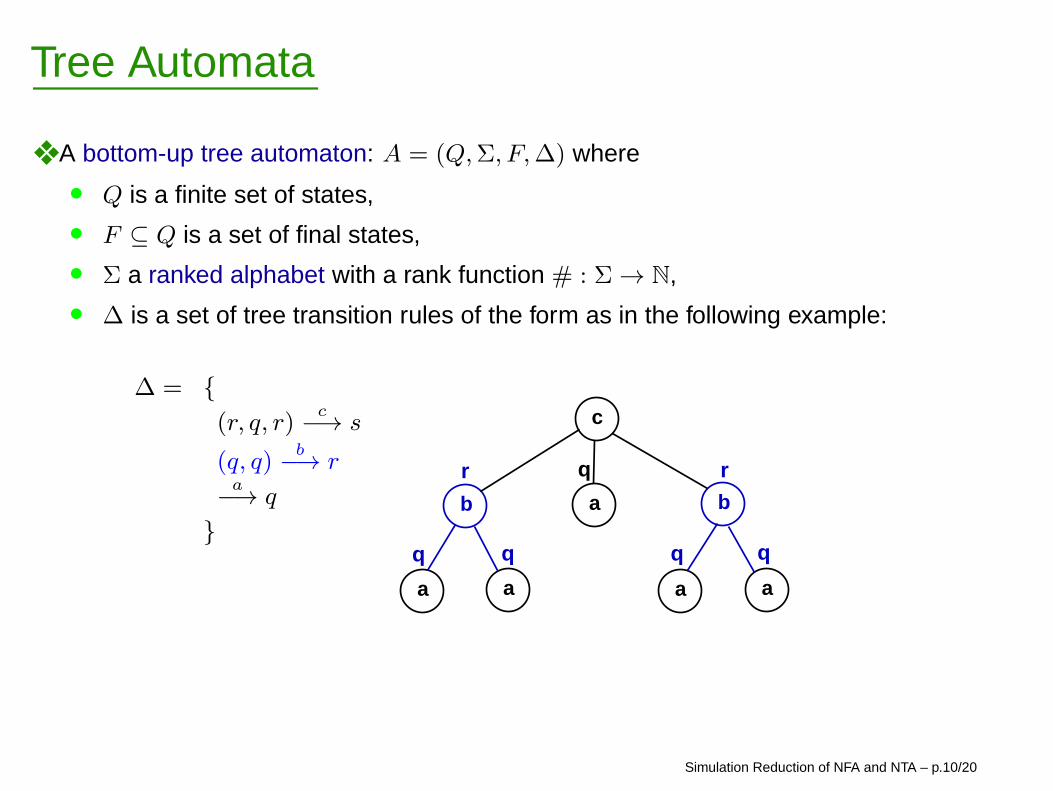
Tree Automata
❖ A bottom-up tree automaton: A = (Q,Σ, F,∆) where
• Q is a finite set of states,
• F ⊆ Q is a set of final states,
• Σ a ranked alphabet with a rank function # : Σ → N,
• ∆ is a set of tree transition rules of the form as in the following example:
∆ = {
(r, q, r)c
−→ s
(q, q)b
−→ ra
−→ q
}
c
b a b
a a a a
q q q q
qr r
s
Simulation Reduction of NFA and NTA – p.10/20

Tree Automata
❖ A bottom-up tree automaton: A = (Q,Σ, F,∆) where
• Q is a finite set of states,
• F ⊆ Q is a set of final states,
• Σ a ranked alphabet with a rank function # : Σ → N,
• ∆ is a set of tree transition rules of the form as in the following example:
∆ = {
(r, q, r)c
−→ s
(q, q)b
−→ ra
−→ q
}
c
b a b
a a a a
q q q q
qr r
s
Simulation Reduction of NFA and NTA – p.10/20
Tree Automata
❖ A bottom-up tree automaton: A = (Q,Σ, F,∆) where
• Q is a finite set of states,
• F ⊆ Q is a set of final states,
• Σ a ranked alphabet with a rank function # : Σ → N,
• ∆ is a set of tree transition rules of the form as in the following example:
∆ = {
(r, q, r)c
−→ s
(q, q)b
−→ ra
−→ q
}
c
b a b
a a a a
q q q q
qr r
s
Simulation Reduction of NFA and NTA – p.10/20

Tree Automata
❖ A bottom-up tree automaton: A = (Q,Σ, F,∆) where
• Q is a finite set of states,
• F ⊆ Q is a set of final states,
• Σ a ranked alphabet with a rank function # : Σ → N,
• ∆ is a set of tree transition rules of the form as in the following example:
∆ = {
(r, q, r)c
−→ s
(q, q)b
−→ ra
−→ q
}
c
b a b
a a a a
q q q q
qr r
s
Simulation Reduction of NFA and NTA – p.10/20

Downward Simulation
❖ D ⊆ Q×Q is a downward simulation
if q D r implies that
whenever (q1, . . . , qn)f
−→ q,
then also (r1, . . . , rn)f
−→ r with qi D ri for all 1 ≤ i ≤ n.
����������������������������������������
����������������������������������������
����������������������������������������
����������������������������������������
��������������������������������
��������������������������������
��������������������������������
��������������������������������
��������������������������������
��������������������������������
����������������������������������������
����������������������������������������
1q1Dr q Dri iq Drn n
... ...... ...
thenifq D r
n1 iq q qn1 i
q
r r r
r
Simulation Reduction of NFA and NTA – p.11/20

Downward Simulation
❖ D ⊆ Q×Q is a downward simulation
if q D r implies that
whenever (q1, . . . , qn)f
−→ q,
then also (r1, . . . , rn)f
−→ r with qi D ri for all 1 ≤ i ≤ n.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������
t t
thenifq rD
q r
Simulation Reduction of NFA and NTA – p.11/20

Upward Simulation
❖ Let D be a downward simulation.
❖ UD ⊆ Q×Q is an upward simulation induced by D
if q UD r implies that
whenever (q1, . . . , qn)f
−→ q′ where qi = q,
then also (r1, . . . , rn)f
−→ r′ where ri = r, q′ UD r′, and qjDrj for all1 ≤ i 6= j ≤ n,
moreover, q ∈ F =⇒ r ∈ F .
������������
������������
������������
������������
������������������������������������������������������������������������������
������������������������������������������������������������������������������
������������������������������������������������������������������������
������������������������������������������������������������������������
��������
��������
������������
������������
������������������������������������������������������������������������
������������������������������������������������������������������������
������������������������������������������������������������������
������������������������������������������������������������������
qnDrnq1Dr1 ............
Dq’ U r’
if then
q UD r
q1 qn i−1 i+11 n
r’
r r r rrqq qi−1 i+1
q’
Simulation Reduction of NFA and NTA – p.12/20

Upward Simulation
❖ Let D be a downward simulation.
❖ UD ⊆ Q×Q is an upward simulation induced by D
if q UD r implies that
whenever (q1, . . . , qn)f
−→ q′ where qi = q,
then also (r1, . . . , rn)f
−→ r′ where ri = r, q′ UD r′, and qjDrj for all1 ≤ i 6= j ≤ n,
moreover, q ∈ F =⇒ r ∈ F .
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
c c
thenif
UD rq
q r
Simulation Reduction of NFA and NTA – p.12/20

Mediation and Tree Automata
❖ A mediated preorder D⊕U is the maximal transitive fragment of D ◦U−1
D containing D.
After collapsing q and r:
r
q
q
s
t
t
t
cc
c
r,
q ∼M r
qMr =⇒ ∃s : qDs ∧ rUs
Simulation Reduction of NFA and NTA – p.13/20
Mediation and Tree Automata
❖ A mediated preorder D⊕U is the maximal transitive fragment of D ◦U−1
D containing D.
❖ In fact, one can combine:
• an inducing downward relation: simulation (DS), bisimulation (DB), identity (Id).
• an induced upward relation: simulation (US), bisimulation (UB), identity.
Simulation Reduction of NFA and NTA – p.14/20

Mediation and Tree Automata
❖ A mediated preorder D⊕U is the maximal transitive fragment of D ◦U−1
D containing D.
❖ In fact, one can combine:
• an inducing downward relation: simulation (DS), bisimulation (DB), identity (Id).
• an induced upward relation: simulation (US), bisimulation (UB), identity.
Id ⊕ UB
Id ⊕ US
Id
DB ⊕ US
DB ⊕ UB
DB
DS ⊕ US
DS ⊕ UB
DS
Simulation Reduction of NFA and NTA – p.14/20

Mediation and Tree Automata
❖ A mediated preorder D⊕U is the maximal transitive fragment of D ◦U−1
D containing D.
❖ In fact, one can combine:
• an inducing downward relation: simulation (DS), bisimulation (DB), identity (Id).
• an induced upward relation: simulation (US), bisimulation (UB), identity.
Id ⊕ UB
Id ⊕ US
Id
DB ⊕ US
DB ⊕ UB
DB
DS ⊕ US
DS ⊕ UB
DS
Reduction capabilities
Computational cost
Simulation Reduction of NFA and NTA – p.14/20
Experiments with Mediated Reduction on TA
TA DS Id ⊕ US DB ⊕ US DS ⊕US
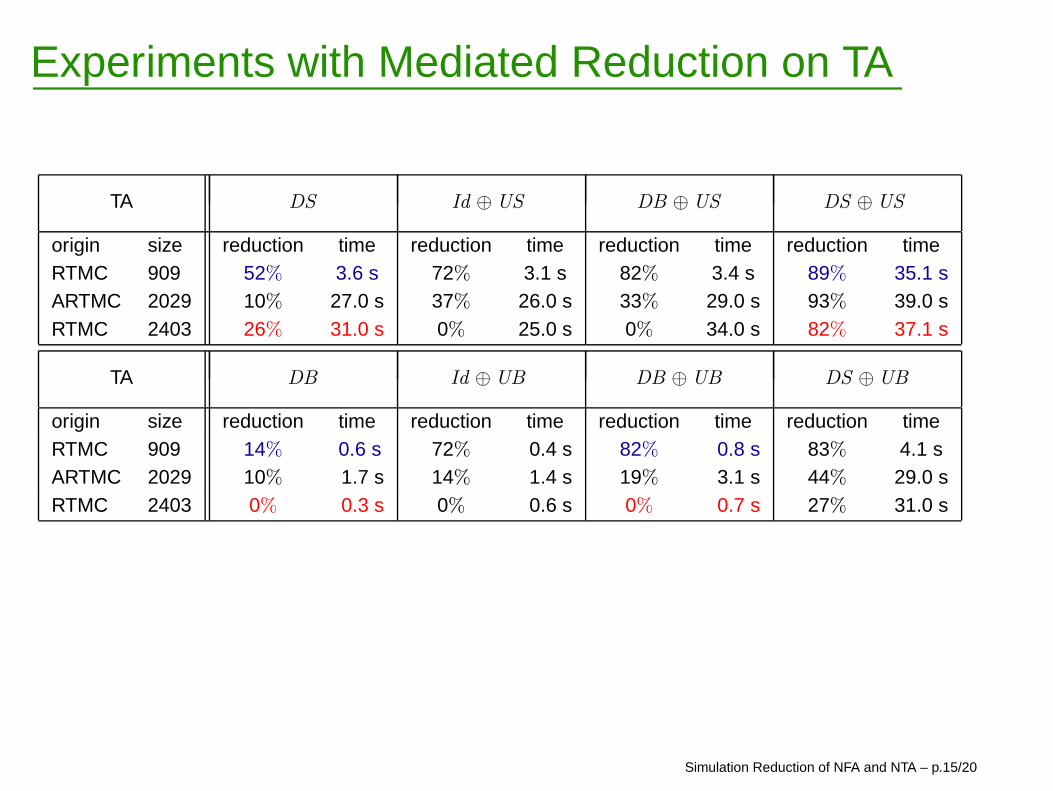
origin size reduction time reduction time reduction time reduction timeRTMC 909 52% 3.6 s 72% 3.1 s 82% 3.4 s 89% 35.1 sARTMC 2029 10% 27.0 s 37% 26.0 s 33% 29.0 s 93% 39.0 sRTMC 2403 26% 31.0 s 0% 25.0 s 0% 34.0 s 82% 37.1 s
TA DB Id ⊕ UB DB ⊕ UB DS ⊕UB
origin size reduction time reduction time reduction time reduction timeRTMC 909 14% 0.6 s 72% 0.4 s 82% 0.8 s 83% 4.1 sARTMC 2029 10% 1.7 s 14% 1.4 s 19% 3.1 s 44% 29.0 sRTMC 2403 0% 0.3 s 0% 0.6 s 0% 0.7 s 27% 31.0 s
Simulation Reduction of NFA and NTA – p.15/20

Computing Simulationson Tree Automata and
Labelled Transition Systems
Simulation Reduction of NFA and NTA – p.16/20

Computing Downward Simulations
❖ Via a translation from NTA to LTS:
(q1, . . . , qn) q
qnq1
(q1, . . . , qn)a
−→ qTA:
...
1 n
aLTS:
❖ Theorem: q D r iff q 4 r .
Simulation Reduction of NFA and NTA – p.17/20

Computing Upward Simulations
❖ Via a translation from NTA to LTS:
q(q1, . . . ,✷i, . . . , qn)a
−→ qqiλ
∀ia
LTS:
TA: (q1, . . . , qn)a
−→ q
❖ Theorem: q UD r iff q 4I r .
• 4I is the maximal upward simulation included in the relation I defined as follows:–
(
q , r)
∈ I for all q, r ∈ Q and
–(
(q1, . . . ,✷i, . . . , qn)a
−→ q , (r1, . . . ,✷i, . . . , rn)a
−→ r)
∈ I iff qj D rj for all
1 ≤ j 6= i ≤ n.
Simulation Reduction of NFA and NTA – p.18/20
Complexity
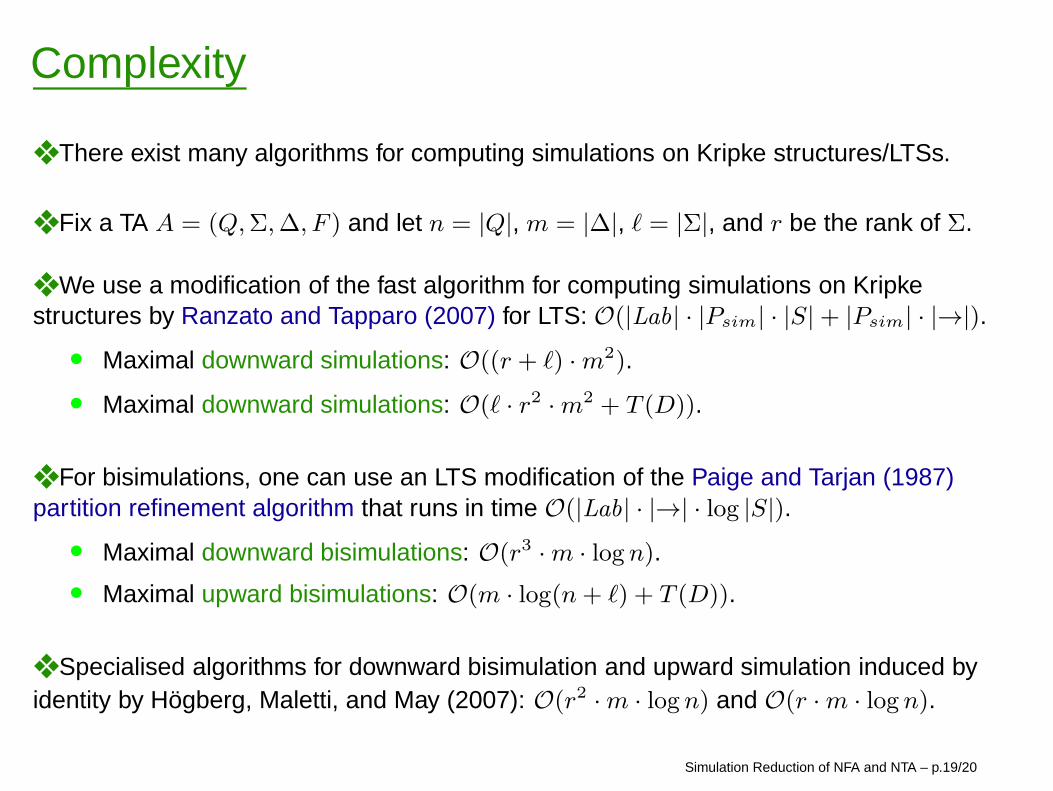
❖ There exist many algorithms for computing simulations on Kripke structures/LTSs.
❖ Fix a TA A = (Q,Σ,∆, F ) and let n = |Q|, m = |∆|, ℓ = |Σ|, and r be the rank of Σ.
❖ We use a modification of the fast algorithm for computing simulations on Kripkestructures by Ranzato and Tapparo (2007) for LTS: O(|Lab| · |Psim| · |S|+ |Psim| · |→|).
• Maximal downward simulations: O((r + ℓ) ·m2).
• Maximal downward simulations: O(ℓ · r2 ·m2 + T (D)).
❖ For bisimulations, one can use an LTS modification of the Paige and Tarjan (1987)partition refinement algorithm that runs in time O(|Lab| · |→| · log |S|).
• Maximal downward bisimulations: O(r3 ·m · logn).
• Maximal upward bisimulations: O(m · log(n+ ℓ) + T (D)).
❖ Specialised algorithms for downward bisimulation and upward simulation induced byidentity by Högberg, Maletti, and May (2007): O(r2 ·m · logn) and O(r ·m · logn).
Simulation Reduction of NFA and NTA – p.19/20

Computing Simulations on LTS
[Holík, Šimácek MOSIS’09]Simulation Reduction of NFA and NTA – p.20/20
![Attribute Based Encryption (and more) for Nondeterministic Finite Automata … · 2019. 8. 21. · Waters [Wat12] provided a construction of ABE for Deterministic Finite Automata](https://static.fdocuments.in/doc/165x107/5feffd99b563161eb9585239/attribute-based-encryption-and-more-for-nondeterministic-finite-automata-2019.jpg)









![On Invertible Cellular Automata · sets (see [6]); finite transducer is a nondeterministic finite automaton (possi bly with e-moves) that produces an output string at each step; for](https://static.fdocuments.in/doc/165x107/5e6bbf764884ff3b9e4f184b/on-invertible-cellular-automata-sets-see-6-finite-transducer-is-a-nondeterministic.jpg)







