Simulation of Symmetrical Induction Machinery
16
IEEE TRANSACTIONS ON POWER APPARATUS AND SYSTEMS VOL. PAS-84, NO. 11 NOVEMBER 1965 Simulation of Symmetrical Induction Machinery P. C. KRAUSE MEMBER, IEEE, AND C. H. THOMAS, SENIOR MEMBER, IEEE Abstract-The effectiveness of an analog computer in studying 1) balanced conditions the performance of induction machinery is demonstrated with 2) unbalanced stator voltages computer results which show the dynamic behavior of 2-phase and 3) unequal rotor resistors 3-phase machines during balanced and unbalanced operation. The computer simulation for these various modes of operation is con- 4) a combination of unbalanced stator voltages and un- veniently obtained from the equations which describe the sym- equal rotor resistors metrical induction machine in an arbitrary reference frame. 5) opening and reclosing of stator phases. Of particular interest is the representation which is used to simulate the opening and closing of a stator phase. This simulation DEFINITIONS AND BASIC EQUATIONS would be useful in studying the performance of the induction machine when used in conjunction with electronic switching devices. A symmetrical machine is generally defined as a poly- The examples which are given can be used directly, or in a slightly phase machine with modified form, to study various practical problems. Also, these examples should serve as guideposts in selecting the best reference 1) uniform air gap frame or the best combination of reference frames to be used in the 2) linear magnetic circuit computer simulation of systems which have more than one machine. 3) identical stator windings, distributed so as to produce a sinusoidal MMF wave in space with the phases and ar- INTRODUCTION ranged so that only one rotating MM1F wave is estab- lished by balanced stator currents IN MANY APPLICATIONS, the dynamic behavior of 4) rotor coils or bars arranged so that, for any fixed time, the induction machine has an important effect upon the the rotor MMF wave can be considered to be a space overall performance of the system of which it is a part. sinusoid having the same number of poles as the stator Two examples of this would be the speed of response of a MMF wave. 2-phase servomotor or the hunting of a doubly excited in- duction machine. Although induction machines are gen- Although the symmetrial machine is an idealized machine, erally operated under balanced conditions, various un- it offers a means of predicting the performance of many balanced or unsymmetrical conditions can occur. For ex- types of polyphase induction machines. Some important ample, the stator phase voltages may become temporarily factors which effect the performance of the actual machine unbalanced due to system disturbances, or may be opened but have been neglected in the symmetrical machine are and reclosed or intentionally reversed; the applied voltages 1) nonlinear magnetic circuit of a 2-phase servomotor are continuously unbalanced. 2) change in resistance due to temperature and fre- Furthermore, unequal external rotor resistors may occur quency changes due to a temporary malfunction in the external rotor cir- 3) harmonic content of the MMF wave. cuits and, in some cases, switching may occur in the rotor phases. in establishing the equations which describe the be- In order to use the analog computer effectively, it is havior of induction machinery, it is generally sufficient to important to have an induction machine representation consider an elementary 2-pole 2-phase symmetrical ma- which can easily be arranged to simulate many of these chine This development can then be extended to include modes of operation. To fulfill this requirement, a computer a machine having any number of poles by simply multiply- representation is developed which can be conveniently ing the expression for torque by the number of pole pairs. altered to simulate the symmetrical induction machine in If only balanced conditions are being considered, the modi- any reference frame. The representation is then modified fications necessary to include 3-phase machines are equally and extended to allow various unbalanced and unsym- straightforward. If, however, unbalanced or unsymmetrical metrical conditions to be investigated. In particular, com- operation is to be analyzed, it becomes necessary to con- puter representations are developed, and computer results sider the 2-phase and 3-phase machines individually. aregiven forthefollowing modesvof operation: Therefore, instead of limiting this work to either a 2- phase or 3-phase machine, parallel developments will be Paper 31 TP 65-120, recommended and approved by the Rotating given. Machinery Committee of the IEEE Power Group for presentation For the development of the 2-phase machine, the simpli- at the IEEE Winter Power Meeting, N.ew Y ork,l N. Y., Ja nuary31 fedrpentio shw inFg1wllbemoy. available for printing December 3, 1964. ' When a stator winding is distributed for the purpose of Smen of the wr re porrtedt hrwapeformteP..dged in parctrical fuglfill- producing a sinusoidal MIMF wvave in space, it is convenient mentgo thiereqiremnt for thKh..derennelcriasegner to portray the winding as an eqivalent single coil and cx- P. C. Krause is with the University of Wisconsin, Madison, Wisc. press the mutual coupling between it and an equivalenlt C.iH.aThomasWisc wihteAlsCamr'MnfcuigCmay rotor coil as a vsinusoidal function of the angular displace- 10)38
-
Upload
ifat-ipeh-fatmawati -
Category
Documents
-
view
150 -
download
15
Transcript of Simulation of Symmetrical Induction Machinery

IEEE TRANSACTIONS ON POWER APPARATUS AND SYSTEMS VOL. PAS-84, NO. 11 NOVEMBER 1965
Simulation of Symmetrical Induction MachineryP. C. KRAUSE MEMBER, IEEE, AND C. H. THOMAS, SENIOR MEMBER, IEEE
Abstract-The effectiveness of an analog computer in studying 1) balanced conditionsthe performance of induction machinery is demonstrated with 2) unbalanced stator voltagescomputer results which show the dynamic behavior of 2-phase and 3) unequal rotor resistors3-phase machines during balanced and unbalanced operation. Thecomputer simulation for these various modes of operation is con- 4) a combination of unbalanced stator voltages and un-veniently obtained from the equations which describe the sym- equal rotor resistorsmetrical induction machine in an arbitrary reference frame. 5) opening and reclosing of stator phases.
Of particular interest is the representation which is used tosimulate the opening and closing of a stator phase. This simulation DEFINITIONS AND BASIC EQUATIONSwould be useful in studying the performance of the inductionmachine when used in conjunction with electronic switching devices. A symmetrical machine is generally defined as a poly-The examples which are given can be used directly, or in a slightly phase machine with
modified form, to study various practical problems. Also, theseexamples should serve as guideposts in selecting the best reference 1) uniform air gapframe or the best combination of reference frames to be used in the 2) linear magnetic circuitcomputer simulation of systems which have more than one machine. 3) identical stator windings, distributed so as to produce
a sinusoidal MMF wave in space with the phases and ar-
INTRODUCTION ranged so that only one rotating MM1F wave is estab-lished by balanced stator currents
IN MANY APPLICATIONS, the dynamic behavior of 4) rotor coils or bars arranged so that, for any fixed time,the induction machine has an important effect upon the the rotor MMF wave can be considered to be a space
overall performance of the system of which it is a part. sinusoid having the same number of poles as the statorTwo examples of this would be the speed of response of a MMF wave.2-phase servomotor or the hunting of a doubly excited in-duction machine. Although induction machines are gen- Although the symmetrial machine is an idealized machine,erally operated under balanced conditions, various un- it offers a means of predicting the performance of manybalanced or unsymmetrical conditions can occur. For ex- types of polyphase induction machines. Some importantample, the stator phase voltages may become temporarily factors which effect the performance of the actual machineunbalanced due to system disturbances, or may be opened but have been neglected in the symmetrical machine areand reclosed or intentionally reversed; the applied voltages 1) nonlinear magnetic circuitof a 2-phase servomotor are continuously unbalanced. 2) change in resistance due to temperature and fre-Furthermore, unequal external rotor resistors may occur quency changesdue to a temporary malfunction in the external rotor cir- 3) harmonic content of the MMF wave.cuits and, in some cases, switching may occur in therotor phases. in establishing the equations which describe the be-
In order to use the analog computer effectively, it is havior of induction machinery, it is generally sufficient toimportant to have an induction machine representation consider an elementary 2-pole 2-phase symmetrical ma-which can easily be arranged to simulate many of these chine This development can then be extended to includemodes of operation. To fulfill this requirement, a computer a machine having any number of poles by simply multiply-representation is developed which can be conveniently ing the expression for torque by the number of pole pairs.altered to simulate the symmetrical induction machine in If only balanced conditions are being considered, the modi-any reference frame. The representation is then modified fications necessary to include 3-phase machines are equallyand extended to allow various unbalanced and unsym- straightforward. If, however, unbalanced or unsymmetricalmetrical conditions to be investigated. In particular, com- operation is to be analyzed, it becomes necessary to con-puter representations are developed, and computer results sider the 2-phase and 3-phase machines individually.aregiven forthefollowing modesvof operation: Therefore, instead of limiting this work to either a 2-
phase or 3-phase machine, parallel developments will bePaper 31 TP 65-120, recommended and approved by the Rotating given.
Machinery Committee of the IEEE Power Group for presentation For the development of the 2-phase machine, the simpli-at the IEEE Winter Power Meeting, N.ew York,lN. Y., Ja nuary31 fedrpentio shw inFg1wllbemoy.
available for printing December 3, 1964. ' When a stator winding is distributed for the purpose of
Smen of the wrreporrtedthrwapeformteP..dgedin parctrical fuglfill- producing a sinusoidal MIMF wvave in space, it is convenientmentgo thiereqiremnt for thKh..derennelcriasegner to portray the winding as an eqivalent single coil and cx-P. C. Krause is with the University of Wisconsin, Madison, Wisc. press the mutual coupling between it and an equivalenltC.iH.aThomasWisc wihteAlsCamr'MnfcuigCmay rotor coil as a vsinusoidal function of the angular displace-
10)38

KRAUSE AND THOMAS: SIMULATION OF SYMMETRICAL MACHINES 1039
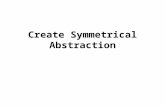
ment between their magnetic axes. If the induction ma-
chine has either a squirrel-cage rotor or a coil-wound rotor
br-axisbs-axis ~~~with the same number of phases as the stator, the rotor
can be considered as havinig equivalent coils (shown inFig. 1). The modifications, which are necessary to include
ar-axis a double-cage rotor or a rotor wound with a different num-ber of phases than the stator, are straightforwvard and will
br Gr ~~~~~not be considered in this development.bs ROTOR- - as-axis The stator windings are identical, i.e., both windings
ROTATION have an identical niumber of effective turns ATs, identicalresistance r5,, identical leakage inductance L,,, and identical
or ~~~~~~~self-inductance Ls. Similarly, equivalent rotor windingsare identical which have the same effective turnis N7, resis-
s~~~~~~~tance r,, leakage inductance Ll,, and self-inductance Lr.
The voltage equationis for the stator phases are written
rs ~~~~~~~rVas = PXas + iazsrs (1)
N5 Nr Nr Vb= PXbs ± ibsrs, (2)Va tsN var In the case of the rotor phases,
+lb ~~~~~~~~~Var=PXar + iarrr (3)bst 'br
~rr+
vbs+~~~~~~ ~rVbr =PXbr ± ibrrr (4)
STATOR ~~~~ROTOR where X is the total flux-linkages of a particular winding,STATOR ~~~~~~~~~~andp is the operator d/dt.
Fig. 1. A 2-pole 2-phase symmetrical machine. The flux-linkage equa-tion can be written
[Xas]IXbsIJXarJ
br-axis as' [ s 0 L87 cos Or -Lsr Sin Or Fiasi
L,co L,7si Lsr Sin Orcos1Or b
bior-axis L -Lrsn Or Lsr CoOS 1r0L LibrJ
r ROTATION ~~er(5STATOR ROTOR as9:..~ where L,r iS the amplitude of the mutual inductance be-
cr ~~~~~tween stator and rotor windinigs and 0, is the angular dis-br s ~~~~~~~~placement between the stator and rotor axes (Fig. 1).
b s or ~~~~~~~~~~Inmost cases, the stator and rotor of a 3-phase inductionmachine are connected as 3-wire systems. In the case of
s ~~~~~~~asquirrel-cage machine, the rotor windings can be consid-ered equivalent to a 3-wire system. A symmetrical 3-
cs- axisr-OX'iS ~~~~phase machine of this type is shown in Fig. 2. Four-wire
1bs i connections will not be considered.The line-to-neutral stator voltages are
+ N5 Nr r br Vas =- PXas + iasrs (6)N Ns r~ r-PS+'bl

1040 IEEE TRANSACTIONS ON POWER APPARATUS AND SYSTEMS NOVEMBER
Since the stator and the rotor are 3-wire systems, the flux- in whichlinkage equations are given in (12). = LS - LSm (13)
Lrr = Lr - Lrm (14)where Lsm is the mutual between stator phases and Lrm isthe mutual between rotor phases.
.D, D, *,~.~e~ D, . TRANSFORMATION TO AN ARBITRARY REFERENCE FRAMEL
Due to the sinusoidal variation of mutual inductancesW ¢: W :<, with respect to the displacement angle Or, time-varyingN c0+ coefficients will appear in the voltage equations. Fortu-
.- tnately, this undesirable feature can be eliminated by a
N%_~. proper change of variables which, in effect, transforms theo o K voltages and currents of both the stator and rotor to a com-
mon frame of reference. In most cases, the analysis of aninduction machine is carried out in either a synchronouslyrotating reference frame or a stationary reference frame.kIc"#:> b1 It is, however, unnecessary to consider each reference
+ 0 I frame separately in the development of the equations<,:qb K :0which describe the behavior of the symmetrical machine.Instead, it is convenient to develop the equations for an
o 9 o arbitrary reference frame and, from these general equa-tions, obtain the equations for any specific reference frame.The equations of transformation are expressions which
b b formulate a change of variables and could be written with-cs 0 out any physical interpretation. It is helpful, however, toI+ correlate the change of variables (transformation equa-
°, 0O C tions) to trigometric relationships which exist between setsof axes. To illustrate this facility, a third set of axes will beintroduced. Figure 3 shows the angular relation of the
4 4 C stator and rotor axes of a 2-phase machine with the thirdset which is an orthogonal set (d-q axis) rotating at anarbitrary electrical angular velocity w. It is clear that the
+ I W as-bs set is fixed in the stator. The ar-br set is fixed in therotor and hence rotates at an electrical angular velocity
0 o ;" cs 8of Wr. The time-zero angular relationship between the threeo 4, 4 sets of axes can be selected arbitrarily. However, it is con-
venient to assume that, at time zero, the q, ar, and as axescoincide.The equations of transformation, which can be corre-
IsoO W o: lated to the angular relation of the axes in Fig. 3, are
W M + Stator
fqs = fas cos 0 + fb, sin a (15)0~~~fd, = fas sin G- fb. cos 0 (16)
Rotorfqr = far cos , + fb Sill ,B (17)
X + whr fdT = far sin 13 - fbrcos ,8 (18)
3 o 13 = a °r. (19),<"<¢ ~~In these equations, the variable f can represent either
L_____________,___________ voltage, current, or flux-linkage. The equations of trans-11frmto are valid regardless of form of the voltages and
r " ¢" K K n ~~~~~currents in either the stator or the rotor. However, the. < < t< < < < . ~~~~equations are restricted in that the instantaneous angular

1965 KRAUSE AND THOMAS: SIMULATION OF SYMMETRICAL MACHINES 1041
br-axis bs-axis bs-axis@ ~~~~~~~~~~~~~br-axis
q-axis -q-axis
-ar-axis e
er-.--as-axis
Cs-axiscr-axis d-axis
d-axis Fig. 4. Axes of 2-pole 3-phase symmetrical machine.Fig. 3. Axes of 2-pole 2-phase symmetrical machine.
displacement 0 of the arbitrary reference frame must be for = - (far + fbr + fcr). (33)a continuous finite function.
If the equations of transformation are used to trans- These equations of transformation can be correlated toform the voltages and currents of both the stator and the the trigometric relationships between the stator and rotorrotor to the arbitrary reference frame (d-q axis), then axes and the d-q axis which rotates at an arbitrary angular
VqP = PXqs + XdsPO + rsiqs (20) velocity w (Fig. 4).The variables fos and for are incorporated since, in gen-
Vds = PXds- XsPO + rsids (21) eral, three independent variables are necessary. If, how-
Vqr = P>qr + XdrP/3 + rriqr (22) ever, only balanced conditions are to be considered, thethree voltages (currents) are defined by any two. Hence,
Vdr = PXdr- XqrPI3 + rridr (23) a third substitute variable is unnecessary. Furthermore,where since only 3-wire systems are being analyzed, it will be
Xqs = Lsiqs + L7riqr (24) shown that for the types of unbalance considered, the zeroquantities are nonexistent. Therefore, these quantities
Xds = LSidS + LSTidT (25) will be excluded from this equivalent circuit development.
Aqr = Lriqr + Lsriqs (26) If the flux-linkage equations are defined as
Xdr = Lridr + Lsrids. (27) Xqs = Lssiqs + 3 Lsriqr (34)In the case of a 3-phase machine, the following change of
variables will eliminate the variation of the mutual in- ,3ductances, Xds LSSid 2+ 2 Lsrid7 (35)
Stator
2 F/ 27r~~~~~~~~~~/ 2\1~~~~~Xqr = Lrriqr + - Lsriqs(6fqs = j [fas cOs 0 + ff1 cos(CO -0 ) + f cos ( + 2 (36)
(28) Xdr = Lrridr + - Lsrids (37)
fds = [ fas sin 0+ fbs sin ---) + fes sin 0 +- the dq voltage equations for the 3-phase machine can be3 3 3 expressed in the same form as those for a 2-phase machine
(29) [(20) to (23)].1 Generally, the machine parameters are measured with
fos (fas + fbs + fLs) (30) respect to the stator windings. Therefore, it is convenient
Rotor ~~~~~~~~~~~~torefer all rotor quantities to the stator windings. WithRotor ~~~~~~~~~~~therotor variables referred to the stator windings andhfr = 3 [far cos +3+ r cos (, r)~+ fcr cos (+ 21) with self-inductance separated into a leakage inductance3 \ ~~~~31 31 component and a magnetizing inductance component,
(1) the voltage equations for either the 2-phase or 3-phase2F f 2~~~\ / 2ir\1 ~machine become
fdr =3[farsin:3+ fbr sin(j - 3 ) + fcrsin (di + ) q = pX5, + Ayd,p0 + r5iq5 (38)(32) Vda = PXAda - XAqsp0 + raid, (39)

1042 IEEE TRANSACTIONS ON POWER APPARATUS AND SYSTEMS NOVEMBER
P`ds9 'A' p where n is the number of phases and P is the number ofrsds LIS ~Llr dr rr pes+- - ~~~~~~~~+ pls++
;qs M X ;qr COMPUTER REPRESENTATION OF A SYMMETRICALvqs qr MACHINE-ARBITRARY REFERENCE FRAME
q .-axis- In a computer simulation, it is essential to be able to ob-q-axis serve the important systenm variables and desirable to ful-
fill this requirement with the minimum amount of equip-A Pe A Poqr , ment. A computer representation which achieves this 2-
rSqs L Is LXIr
qr
rr fold objective can be developed for the symmetrical ma-chine by first solving equations (42) to (45) for the cur-
ds M dr rents. Hence,'ds r r
iqs = (qs - 4I'mq) (54)d-axis Xis
Fig. 5. The d and q equivalent circuits of symmetrical inachine; 1arbitrary reference frame. ids = ('ds - rmd) (55)
x's
V'qr = PX'qr + X'drP/3 + r'Tifqr (40) it r = 1 -qr-Rmq) (56)V'dr = PX'dr - X'qrp/3 + r'ri'dr (41) lT
where ildr = (II'dr - ,tmd) (57)
Xqs = Llsiqs + M(iqs + i'qr) (42) whereXds = LisidS + M(id,, + iVdr) (43) {me = Xm(jqs + i'qr) (58)
X'qr = LIiri'qr + M(iqs + i'qr) (44) id = Xm(ids + i'dT) (59)
Xdr = L'lTi'dr + MIi(ids + iVdr)- (45) In these equations,
For the 2-phase machine, 5tqs = WeXqs, etc. (60)
Lis L- Lms (46) where We is the base electrical angular velocity correspond-
LIIT LDr -Lms (47) ing to rated frequency.If (54) to (57) are used to eliminate the currents in (38)
AI -lms (48) to (41), as well as in (58) and (59), and if the resulting
where voltage equations are solved for Vs2 %t'ds, 41' r, and *'dr, the
Nsfollowing computer equations are obtained:
Lms = Ls,7 (49) WL = sL ( ){ = >V -)Qds+ rs ( q- 'qs)] (61)
For the 3-phase machine,
Ls= L - 2 (50) 3ds = LVds + 'kqs +s
('kmd - 4lds)J (62)
Lisr = L.,s - 2LMS (51) =p COer- (x)fd -sm r](32
3 = FdV dr - (W ) dr + r7 (kmd -fdr) (63)LIir = (3)-Li (51) (45) L \hee / X ir
2
An expression for the instantaneous electromagnetic r r
torqu can ber obtainedby applying thdr + (Winciple o ('krd= 'kdr)1 (64)MvLins=ip (52) rldo hich ise / + i
2where
The primes are used to deiote rotor quantities referred /to the stator w indisE t (45) suggest teiq X (s 'k q X (65)

1965 KRAUSE AND THOMAS: SIMULATION OF SYMMETRiCAL MACHINES 1043
\q'mq Xmd Xmq erly developed. If, in the case of a 3-phase machine, thexa - voltages Vas, vb8, and v,, are known, the qs and ds applied
lr Irvoltages, in a reference frame fixed in the stator, are ob-
Vqsq Xmd Xmq tained by setting 0 0. Thus,l bl .e The raised indeXxs XIS
rs IJie vs VasoD -Vdssies (69)c ~~~2\2 2
We D 4 _ < and Vds = Vbs + Vs O
4 4 g ves = vgS Os fle - Vds sin°ea, vs,) (70)
xFr The raised index s is used to denote variables in the refer-trary reference frame fixed in the stator. In the case of a 2-phase
xI machine, it is clear that
ui ~~~~~~~~~~~~~VqVa(71)
xy ~~~~~~X.l Vds = -Vi,. (72)
htJowvr it iIt is convenient to express the applied voltages in thevarious c . Treference frame fixed in the rotor and in the synchronously
rotating reference frame as functions of vqs and v 7.Thus,
T~j= 2)2))*)COS 0r - Vdr sin 0r (73)ds ~~ ~~~~~~~~~~~~~~~~~~~~~~~rViesHowever,Sine r + Vds cOssr (74)
and
V~~~~~r as~~~~~~~~~ cosCO e - Vds sin 0e(75)
e Vd~~~~~~~~~ = v~~~~~~~~~ ~sin 0, + vd coCO e0. (76)
Fig. 6. Computer representation of symmetrical machine; arbi- The raised index r denotes variables in a reference frametrary reference frame. fixed in the rotor, and the raised index e denotes variables
in the synchronously rotating reference frame.The currents can also be eliminated from the torque For balanced conditions VI eand Vde are constants and
equation. However, it is often desirable to observe the w l ben pted, udesirecly fats rec volts rathe
dvariouscrents. Thu littleand galshed]bmysuceaueliin wouldneismalemeneddoatiretlsycroosdireed.voltaeser,ather
various currents.vot s lteiurrensga rine byasuchlancelimi than simulating (75) and (76). Also, for balanced condi-tion. Therefore, the following equation will be used to ob- tions v and Vds can be obtained more directly by simplify-
t h ring (69) and (70). For balanced conditions (73) and (74),ln\/P\/1\ which express Vq~~~~ and vd', can either be simulated directly or
T) =synchronously rot- tlng reference'h frame Vqs dsTa2s2 (V/ qrildr - rPdri*qr). (68) rearranged and simulated in terms of slip frequency quanti-ties. However, in either case it is necessary to simulate a
The computer representation is given in Fig. 6. It is as- variable frequency oscillator. In such a simulation, it issumed that no sign inversion occurs in the multipliers, difficult to prevent erroneous variations at the output of
In this work, saturation will not be considered. How- the integrators, within the oscillator, during the zero fre-ever, in some applications, it may be necessary to approxi- quency mode of operation. If the slip frequency quantitiesmate the effects of saturation. If this is the case, the method are generated, this undesirable feature occurs if the ma-developed by de Mello and Walsh [11] may be used. chine is allowed to attain synchronous speed. However, this
BALANCEDCONDITIONScan be overcome either by opening the input to theBALANCEDCONDITIONS integrators at synchronous speed or by programming a
It is convenient, at this point in the development, to small constant load torque to prevent the machine fromobervae tbe voltages andb cuorrents duri balncd pera- retac sing synchroanos se aed.Ifl theoaubryiafrequency

1044 IEEE TRANSACTIONS ON POWER APPARATUS AND SYSTEMS NOVEMBER
excited machine will not be considered. Hence, unlessotherwise specified, it will be assumed that
VIqr = V dr = 0. (77) 3.0
In order to obtain the dynamic characteristics, it isnecessary to relate torque and speed. Thus, since CY
m 2.0-0
T ) TL (78)
where TL is the load torque and J is the total inertia, thenecessary computer equation is X
r = JWTTeP 7) 0.2 0.4 0.6 0.8 1.0We /\PJPER UNIT SPEED
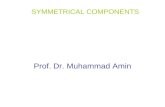
Although the equations and computer representation Fig. 7. Steady-state torque vs. speed characteristics.have been derived by assuming conventional units, it is asimple task to convert to a per-unit system. This conver-sion is generally accomplished by selecting the kilovolt-ampere base and the per-unit voltage to correspond to the ,0rating of the machine. The machine inertia is then ex-pressed in per-unit form as
H = 2 Jw,/base torque (80) 3.
where J is in mks units.\0*An induction machine with the following per-unit O 20
parameters was simulated on the analog computer:z
r. = 0.0453 Xm = 2.0420 r r = 0.0222 ID
XiJ= 0.0775 H = 1.0 X' r = 0.0322. Xl
The per-unit inertia is the combined inertia of the motorand load. The steady-state torque vs. speed characteristics 0.2 0.4 0.6 0.8 1.0are shown in Fig. 7. The torque vs. speed, torque vs. time, PER UNIT SPEEDand speed vs. time characteristics during free acceleration AOare shown in Fig. 8. Figure 9 shows the variables in thethree reference frames during free acceleration. (a)In any analog computer simulation, it is preferable to
eliminate sinusoidal quantities whenever possible. There- 4°0fore, unless it is necessary to retain either the stator or 5.0 PU TORQUErotor variables, the simulation in the synchronously 2.0rotating reference frame is particularly desirable for study-ing balanced operation.
lo le0.1 SEC.
UNBALANCED STATOR VOLTAGES 0.8When the stator voltages become unbalanced, sinusoidal 0. PU SPEED
variations will appear in the d and q quantities regardless of 0Athe choice of reference frame. Since sinusoidal quantities P2-must appear, it is better to select a reference frame whichwill allow the simulation to be achieved with the minimum (b)amount of computing equipment and still retain the iden-titof th imotn aibe. Asumn tha th stato Fig. 8. Free-acceleration characteristics, balanced conditions.titY I thelmporant vrlaDes. ASumln tnattne sator (a) Torque vs. speed. (b) Torque and speed vs. time.
variables are to be retained, the above requirements aresatisfied by selecting a reference frame fixed in the stator.
In the case of a 2-phase machine, the dss - qsS and as -bs variables are simply related. However, the 3-phase case

1965 KRAUSE AND THOMAS: SIMULATION OF SYMMETRICAL MACHINES 1045
108 i*dse Pu CURRENTS. ~~~~~~ds64
2
108. j e PU CURRENT6.q42\
-2l-4/
-8 iqdr PU CURRENT-10l
-2--4-
-6.l PU CURRENT-s- qr
0 1 -0.I SEC.(a)
1.0 1
r 109EEPgIJ%S LTjPVAOLTAGE1 C-1.0i -1010- r 10- : S
5 - ds 5-&s os
-.51dIEM M \AV-RN 5-10 -10 PU CURRENT
rotor.~~~~~~~~~~~(c)Reeecifaefxebntettr
PU VOLTAGE0
-1,*i11001111Y!!Y!YVVV\'5IVIIIIIIIUIIIIIIIIIIIIPU CURRENT
10] 10-
-5 P~~~~~~~~UCURRENT -5]-~~~~~~~~10 ~ ~ ~~ ~ 0
111111] PU CURRENT
10 r10. l5- d~~ ~~~~~~~~~~~~~r 51111dr
-e 0
-51 PU CURRENT PU CURRENT11

1046 IEEE TRANSACTIONS ON POWER APPARATUS AND SYSTEMS NOVEMBER
warrants further consideration. For this development, the where R'a and R'b are the external rotor resistors of phasecircuit shown in Fig. 10 will be considered. a and b, respectively, and are referred to the statorFrom Fig. 10, it is clear that the line-to-neutral voltages windings.
are For the 3-phase development, the circuit shown in Fig.12 will be considered. It is apparent that the line-to-Va, = ega - (8) neutral voltages are
Vbs = egb - vng (82) V ar = V pm - i arR'a (92)
vcs = eg, - vng. (83) v br = V pm - i brR'b (93)
Regardless of the form of the source voltages, VIcr = V'pm - iIcrR'c (94)
Vqs = 3 (ega - e-b-2 eg) (84) hence,
1 + e) (85) = - i rRa + i'brR'b + - z'crR c (95)Vds = (-egb + g) 8)3 3 3
dr j1~',- I RAlso, since only a 3-wire system is being considered, and a V dr ilbrR'b i/crR/c (96)linear magnetic circuit is assumed,
Vos = 0. (86) Var = 0,
If e,a, eob, and eg, are generated, the voltages vqS and Vds andcan be developed by simulating (84) and (85). The phase i ar = ilqr (98)currents are
ias = (87) ibr =- 2 qr 2 i dr (99)
= - 2 iqS 2. s (88) icr = - (i'ar + ilbr) (100)
Thus, (98) to (100) are applied in obtaining the rotor phaseics = (ias + ibs). (89) currents and (95) and (96) are employed in making up V'qr
and V'd', respectively. With this particular simulation, theThe free-acceleration characteristics, shown in Fig. 11, rotor phase currents are available on the computer. If itare for the following unbalanced stator voltages is unnecessary to have these currents available; Vqr and
ega = 1.0cos377t V dr can be expressed in terms of i'qr and i'dr by sub-stituting (98) to (100) into (95) and (96), yielding
e 0.5 cos 37 - 711=.5cos(377-3) qr = -4R6 a+ R'b + R'c)rq (R-b- Rl)i r
ec= 1.0 cos (377t +2) (101)1 1~~~~~V dr (R'b + R'c) itdr (R'b R c)ilqrUNEQUAL ROTOR RIESISTORS 2 2 V\/3
If the rotor windings are connected through unequal (102)external resistors, the rotor phases are no longer sym- The free-acceleration characteristics for the casemetrical. Because of this rotor asymmetry, time varyingresistances will appear in all reference frames except for the Rob =Rc = 0reference frames fixed in the rotor. It is, therefore, con- RI 0.0333venient to use this particular reference frame in investi-gating the effects of unequal rotor resistors upon the per- are shown in Fig. 13. Considering (90) and (91), theseformance of an otherwise balanced machine. same results could also be interpreted as the free-accelera-Once the machine is represented in a reference frame tion characteristics of a 2-phase machine with
fixed in the rotor (i.e. co = w7), the 2-phase machine with R'unequal rotor resistors can be simulated by replacing theRb=°
r in the qr axis with R'a =0.0222.
Rr= r'r + R'a (90) SIMULTANEOUS UNBALANCED STATOR VOLTAGES ANDand the r' in the dr axis withUNQARORREITS
Unbalanced stator voltages and unequal rotor resistorsRr= r'7 ± R'b (91) should seldom occur simultaneously. However, this ab-

1965 KRAUSE AND THOMAS: SIMULATION OF SYMMETRICAL MACHINES 1047
ibs b br
Fig. 10. Stator circuit. Fig. 12. Rotor circuit.
s lo
PU CURRENT-101
Ill
0~~~~~~~~~~1
N =
100 S
5-
3.0t ~~~~~~~~~~~~~~~~~~PUCURRENT
i-1.0~ ~ ~ ~ ~ q
0. . 0.4°0.6.8 C
PER UNIT SPEED °
-'1.0
Fig. 11. Free-acceleration characteristics; unbalanced stator voltages.

1048 IEEE TRANSACTIONS ON POWER APPARATUS AND SYSTEMS NOVEMBER
1.0r
vd s
0. ~~~~~~~PUVOLTAGE
-1.01*
5-do
iX11FllBlllllll I.0.t-,5X iAAhAAAI; 7IIAA'
gg:2 64 s QHINHYYYYYYY V'PJ / U VOTPEE_4,oJil-101 PU CURRENTE o
PUCURRENT
I ~~~~~-IO
0.2~~~~~~~~~~ -04 0.6 0.6C..
Fig. 13. Free-acceleration characteristics; unbalanced rotor resistors.
normal condition serves to illustrate the versatility of the stator phase currents can be obtained by transforming id5computer setup. and igr either to 'tds and ijq5 and then to las, ij, and ics orDepending on the variables of particular interest, a directly to the phase currents.
reference frame fixed either in the stator or in the rotor If a reference frame fixed in the stator is selected, theprobably would be selected. If a reference frame fixed in rotor unbalance must be properly transformed. It is neces-the rotor is to be used, the computer representations sary then to replace V'q and V'dt,(95) and (96),with v'qr andwhich have been developed can be employed directly. V'ds. These relations can be obtained by setting ,3 equal toIn particular, for a 3-phase machine, (95), (96), and (98) - Or rather than zero, at the time the rotor phase voltagesto (100) would be used to account for the rotor unbalance; are substituted into the equations of transformation. It isthe voltages vg and Vds would be made from (84) and (85) clear that, with this choice of reference frame, it is neces-and then transformed to the reference frame fixed in the sary to transform i'dS and i'qS in order to obtain the rotorrotor by imlplementing (73) and (74). If necessary, the phase currents.

1965 KRAUSE AND THOMAS: SIMULATION OF SYMMETRICAL MACHINES
1.b
-1.0
10.0
g MM \VM V 000 1 00 I V V PU CURRENT
-1
-10
-10-
5- ~~~~~~~~~~PUCURRENT'
301 ~~~~~~101 5- ~~~ ~ ~ ~~~~~~'r PU CURRENT
Al.w2S2
PER UNIT SPEED 04
-r1.0 Fq01SC
Fig. 14. Free-acceleration characteristics; simultaneous unbalanced stator voltages and unequal rotor resistors.
The combination of unbalanced stator voltages and mode of operation can be achieved with simple modifica-unequal rotor resistors, which previously were considered tions of the basic machine setup. Assuming that currentindividually, were represented on the computer. A refer- ceases to flow after a normal current zero, the modifica-ence frame fixed in the rotor was used in this simulation. tions amount to maintaining the current at zero by replac-The free-acceleration characteristics are shown in Fig. 14. ing, in the simulation, the source voltage with the open
voltage. For exanple, if, at the instant i2S is zero, VQS is re-DISCONTNUOUS APLIED VLTAGESplaced in the simulation by the voltage which appears
The computer simulations which have been developed across the mutual inductance, the current iqS, which is thethus far can be used to investigate a variety of operating stator current of phase a referred to the stationary refer-conditions. However, no provision has been made for ence frame, will be forced to remain zero. Although a sim-simulating an open phase. Fortunately, simulation of this ilar procedure is possible for the switching of rotor phases,

1050 IEEE TRANSACTIONS ON POWER APPARAT'US ANI) SYS'TEMS NOVEMBER
only the switching of stator phases will be coiisidered in vsb jbsthis development. Therefore, to provide the most simple + -,: _
relation between ds-qs quantities and the stator phase +
quantities, the machine should be simulated in a reference 'SC S N5 5
frame fixed in the stator, when the open circuit voltage of egc g eb +
phase a is VcCNs+l + +
Vas Vqs = -q (103)We as
However; Fig. 15. Stator circuit with provisions for switching.
qs= Prmq - Xmiqr'. (104)thus,Therefore, the open-circuit voltage can be written S Vas (113)
Sq = P Xm St/~~ (105) 1Wes X + r Vds - (-e0b + e..) (114)
Since pi/r" is available at the input to the integrator whichmakes up qs', the open-circuit voltage can be obtained andwithout performing differentiation. Thus, an opening of 1 1
phase a can be simulated by incorporating a relay to switch Vn= (e0b + eQC) + - Vas (115)
VqS from the source voltage to the open-circuit voltage (105)at the instant iqs becomes zero. Although this type of VSa ega--(eg1 + egb)3--as (116)sinmulation is exact for many solid-state switching devices, 2 2
it does not provide for any forcing of a current zero which For the opening of phase b,night occur with mechanical switches.The following equations stipulate the applied voltages Vas = ega- Vng (117)
for simulating the opening of either or both phases of a 1(3Xd2-phase machine. Vb 2We Xm +m )(PX/'qr + V P4"dr) (118)
For the opening of phase a,/ X7n /
vcs= egc- Vng (19
Vqss=w
( mX ) , s (106) Thus(vdS = -eb (source voltage). (107) = 1 1
V55 2 (ega eg.) 2 Vbs(10For the opening of phase b,
v S = ea (source voltage) (108) S 2 (e egc) + (121)
S pf x \Vds = -l
m )s (109) andCWe Xm + X'J r(
For an opening of phase a followed by an opening of phase Vng= -(ega + egc) + -vbs (122)
b, it is clear that during the opening of phase b, the voltage 2 2
Vqss would remain as stipulated by (106). It is apparent that 1 3
the source voltages can be reapplied at any time. VSb= e5b--(ega + e5c)- V11. (123)
In the case of a 3-phase machine, the simulation of an
open phase becomes more involved since id' and i,s need For the openiing of phase c,not be zero at the time one of the phase currents is zero.The procedure however is similar to that used in the 2- Vas esa Vnl7 (124)
phase case. For the circuit shown in Fig. 15, the following V1. = eeb-pnZ (125)
equations can be obtained and, if properly implemented,Xcan be used to simulate the opening of any one or all three v. = - 1 ( m ) (ij4'qs - <V P'k'dr). (126)
stator phases. 2We \Xm + XlT/For the opening of phase a, Thus
W)e \Xm + X'ir/ Vq0)rs = 2(epfla -eub) -2 s (127)
Vbs = -g V,80 (111) 1 __
= eec - Vn07 (112) VdS = - 2x/ (ega - e01) + 2 vcs (128)

1965 KRAUSE AND THOMAS: SIMULATION OF SYMMETRICAL MACHINES 1051
e0a PU VOLTAGE
0.
3 vsQ PU VOLTAGE
O.SO Vng PU VOLTAGEQ25
n
-0.25-
- s PU VOLTAGE
ias PU CURRENT
-5l
as3 PU SPEED=
Fig. 16. Stator~phase opened and reclosed during acceleration.
and CONCLUSION
1 1 The versatility of the electronic analog computer in onen-2 ±\8v eab) + 2 Vcs (129) area of application has been demonstrated. The simulation
2 2 ~~~~~~~~ofinduction machines subjected to operating conditions
1 3 which are cumbersome to analyze or impractical to dup-= ---(ega + e,,)-2- VCS- (130) licate experimentally is of practical importance. Although
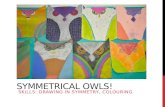
this capability is more evident, perhaps, in the case of ab-These equations are valid regardless of the form of the normal or unbalanced operation, the analog computer issource voltages. If, however, the voltages are balanced, equally useful in studying the dynamic behavior of singlythe equations can be expressed more compactly. or doubly excited induction machines in balanced systems.The computer recordings in Figs. 16 and 17 show the The use of the analog computer as an instructional aid to
effects of switching during free acceleration with balanced demonstrate free acceleration, load torque switching,source voltages. In particular, Fig. 16 shows the opening breakdown, generator action, and other characteristics,and reclosing of phase a; Fig. 17 shows the opening of all has proved advantageous.three phases followed by simultaneous reclosing of all Although it is not practicable to account for all possiblephases. situations, the computer representations are quite general

1052 IEEE TRANSACTIONS ON POWER APPARATUS AND SYSTEMS NOVEMBER
VaS PU VOLTAGE
10- iGS PU CURRENT
__0
1.0V S PU VOLTAGE
-1.0i
10- tbs PU CURRENT
1.0 IVcs PU VOLTAGE
0.5
El IHSjVIiSA1LItILjUf! 0810- iCS PU CURRENT
-5l
1.0
PU TORQUE
-2
I .00.80.6 PU SPEED0.40.2
k +-0.I SEC.
Fig. 17. Stator phases opened and reclosed during free acceleration.
and can be used directly, or modified simply and extended induction motors," Trans. AIEE, vol. 63, pp. 641-646, Sep-tember 1944.to simulate many practical problems. For instance, the [3] P. C. Krause, "Simulation techniques for unbalanced electricalcases considered here would be helpful in determining machinery," Ph.D. dissertation, University of Kansas, Law-rence, 1961.simulations of complex systems involving several machines [4] , "Electronic analog computer representations of inductionwhere it may be advantageous to use an approximate corn- motors with unbalanced terminal voltages, Kansas State Univ.
> > > ~~~~~~~~~~~~~~Bull.,vol. 45, pp. 43-82, July 1961.bination of reference frames. [5] G. Kron, Equivalent Circuits of Electric Machinery. New York:
Wiley, 1951.[6] -- A new theory of hunting, Trans. AIEE (Power Apparatus
REFERENCES and Systems), vol. 71, pp. 859-866, October 1952.[7] R. H. Park, "Two-reaction theory of synchronous machines-[1] C. Concordia, Synchronous Machines. New York: Wiley, 1951. generalized method of analysis-I," Trans. AIEE. vol. 48,[2] F. J. Maginniss and N. R. Schultz, "Transient performance of pp. 716-730, July 1929.

1965 KRAUSE AND THOMAS: SIMULATION OF SYMMETRICAL MACHINES 1053
[81 M. Riaz, "Analogue computer representations of synchronous P. C. Krause and C. H. Thomas: A majority of the questions raisedgenerators in voltage-regulation studies," Trans. AIEE (Power by Dr. Jordan regarding variable frequency operation are answeredApparatus and Systems), vol. 75, pp. 1178-1184, December in Mr. Krause's discussion of Dr. Jordan's recent paper [1]. Jn this1956.
[9] Ibid., p. 1182 (Thomas' discussion). discussion, simulation of variable frequency operation is presented[10] K. G. Black and R. J. Noorda, "Analog computer study of and results of a computer study are given. This material will not be re-
wind-tunnel drive," AIEE Trans. (Communications and Elec- peated in detail. However, brief answers to Dr. Jordan's questionstronics), vol. 76, pp. 745-750, January 1958. . .[11] F. P. de Mello and G. W. Walsh, "Reclosing transients in will be given.induction motors with terminal capacitors," Trans. AIEE When the reference frame is fixed in the rotor, it is necessary to(Power Apparatus and Systems), vol. 80, pp. 1206-1213, simulate a variable frequency oscillator to transform the statorFebruary 1961. applied voltages to this frame of reference. The method of simulating
a variable frequency oscillator is given in basic texts on analogcomputation [2].The angular velocity of the synchronously rotating reference
Discussion frame is determined by the frequency of the stator applied voltages.To simulate variable frequency operation in the synchronously
Howard E. Jordan (Reliance Electric, and Engineering Company, rotating reference frame, the speed of the arbitrary reference frameCleveland, Ohio): The authors are to be complimented for a fine w, must be varied to correspond with the frequency of the appliedpaper on a timely subject. As the applications of solid-state fre- voltages. If the stator applied voltages are unbalanced, (75) and (76)quency converters to the terminals of induction machines increases, may be used directly to transform the applied voltages to the syn-there is an increasing need for techniques that can be used to analyze chronously rotating reference frame. Since the speed of the syn-the transient characteristics of induction machines. chronously rotating reference frame is determined by the frequency
I have several questions, most of which pertain to the application of the stator applied voltages, it would be necessary to simulate aof this simulation technique to situations where the frequency sup- variable frequency oscillator for this transformation. If, however,plied to the stator terminals varies. The applications discussed in the stator applied voltages vary in frequency but are balanced,the paper were concerned primarily with constant frequency cases. the applied voltages in the synchronously rotating reference frameThere is a reference to a variable frequency oscillator in the paper. are constants. Then, it is unnecessary to simulate the transformation.
Would the authors please describe the type of oscillator which they With the reference frame fixed in the rotor, the speed of the arbi-used and how it is controlled? trary reference frame is equal to the speed of the rotor, i.e., w = Wr.
Figure 6 is given as valid for any arbitrary reference frame. The voltages Vqs and Vd' are described by (73) and (74). Since thePlease indicate the input quantities which would have to be varied frame of reference is fixed in the rotor, a variable frequency oscillatorto simulate a variable frequency applied to the stator terminals would be necessary to perform this transformation.for the three cases considered, i.e., When the stationary reference frame is used w = 0. Equations
(69) and (70), or (71) and (72), may be used to develop the direct1) synchronously rotating reference frame and quadrature voltages. It is clear that this transformation does
2)stationaryreference frame.fixedin tnot require a variable frequency oscillator.The quantity we is a constant selected as base frequency conveniient
In addition, what value of cWe would be used for a variable frequency to the per-unit system employed.study? REFERENCES
If the authors have had an opportunity to verify any of their [13 H. E. Jordan, Analysis of induction machines in dynaic sys-analog studies with test data, it would be interesting to know what tems," IEEE Trans. on Power Apparatus and Systems, thiskind of correlation was obtained. issue, pp. 1080-1088.
[2] C. L. Johnson, Analog Computer Techniques. New York:McGraw-Hill, 1956, p. 91.
Manuscript received February 15, 1965. Manuscript received March 25, 1965.