Simulating train movement in railway traffic using a car-following model
6
Simulating train movement in railway traffic using a car-following model This article has been downloaded from IOPscience. Please scroll down to see the full text article. 2009 Chinese Phys. B 18 2200 (http://iopscience.iop.org/1674-1056/18/6/015) Download details: IP Address: 134.153.184.170 The article was downloaded on 08/09/2013 at 06:53 Please note that terms and conditions apply. View the table of contents for this issue, or go to the journal homepage for more Home Search Collections Journals About Contact us My IOPscience
Transcript of Simulating train movement in railway traffic using a car-following model

Simulating train movement in railway traffic using a car-following model
This article has been downloaded from IOPscience. Please scroll down to see the full text article.
2009 Chinese Phys. B 18 2200
(http://iopscience.iop.org/1674-1056/18/6/015)
Download details:
IP Address: 134.153.184.170
The article was downloaded on 08/09/2013 at 06:53
Please note that terms and conditions apply.
View the table of contents for this issue, or go to the journal homepage for more
Home Search Collections Journals About Contact us My IOPscience

Vol 18 No 6, June 2009 c© 2009 Chin. Phys. Soc.
1674-1056/2009/18(06)/2200-05 Chinese Physics B and IOP Publishing Ltd
Simulating train movement in railway trafficusing a car-following model∗
Li Ke-Ping(李克平) and Guan Li-Jia(管立加)
State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing 100044, China
(Received 27 October 2008; revised manuscript received 27 November 2008)
Based on a car-following model, in this paper, we propose a new traffic model for simulating train movement
in railway traffic. In the proposed model, some realistic characteristics of train movement are considered, such as the
distance headway and the safety stopping distance. Using the proposed traffic model, we analyse the space-time diagram
of traffic flow, the trajectory of train movement, etc. Simulation results demonstrate that the proposed model can be
successfully used for simulating the train movement. Some complex phenomena can be reproduced, such as the complex
acceleration and deceleration of trains and the propagation of train delay.
Keywords: train movement, railway traffic, car-following modelPACC: 0550
1. Introduction
Train movement calculation is used to calculatethe velocity and distance profile as a train travels fromone station to another. When the theoretical controlalgorithm of train movement is analysed and evalu-ated, a computer-based simulation model is necessary.An important problem is how to establish and solvethis simulation model. Recently, a number of stud-ies have been performed in this field.[1−5] However,many characteristic behaviours of train movement re-main unknown. What are the mechanisms by whichthe train delays emerge? How do the tracked trainsaffect each other?
The car-following model is one of the importanttraffic models in studying traffic flow, and it is usedmainly to describe the behaviour of an individualdriver. Several car-following models have been pro-posed, including the early car-following models,[6−8]
and some recent improved models.[9−14] Since in thecar-following model realistic driver behaviour and de-tailed vehicle characters are included, it can be used tosimulate various traffic flows which are observed in realtraffic.[15,16] In addition, by using the car-followingmodel, some results can be derived analytically.
In 1995, Bando et al [9] proposed an improved car-
following model, which is called the optimal velocitymodel. Such an improved model attracts a lot of at-tention because of its distinctive features in represent-ing real traffic flow. Lately, research has been carriedout on extending the optimal velocity model. A well-known extended model, called the “general optimalvelocity model”, was proposed by Nagatani[16] in 1999and Sawada[17] in 2001 separately. But most of themfocused on analyzing the characters of density wavefrom the viewpoint of physics.
In the present work, based on the optimal velocitycar-following model, we propose a new model for simu-lating train movement, where the influence of trackedtrains is considered. Using the proposed simulationmodel, we study and discuss some characteristic be-haviours of train movement in railway traffic. To ourknowledge, this work explicitly shows this effect forthe car-following model for the first time. The re-mainder of the present paper is organized as follows.In Section 2, we introduce the optimal velocity model.The principle of the train control system is introducedin Section 3. In Section 4, we outline the proposedmodel. The numerical and the analytical results arepresented in Section 5. Finally, the conclusions ob-tained by using this approach are presented in Section6.
∗Project supported by the National Natural Science Foundation of China (Grant Nos 60634010 and 60776829), the New Century
Excellent Talents in University, China (Grant No NCET-06-0074), and the Key Project of Ministry of Education, China (Grant
No 107007).http://www.iop.org/journals/cpb http://cpb.iphy.ac.cn

No. 6 Simulating train movement in railway traffic using a car-following model 2201
2. The optimal velocity model
The car-following model describes the motion ofa vehicle following its leader vehicle without making alane change. In the car-following model, a follower ve-hicle tries to maintain a space gap behind its leader ve-hicle. A classical car-following model was proposed byPipes.[6] In order to account for the time lag, Chandleret al [7] suggested an improved car-following model,
xn(t + T ) = λ[xn+1(t)− xn(t)], (1)
where xn(t) is the position of vehicle n at time t, T isa response time lag, and λ is the sensitive coefficient.For a more realistic description, Newell[8] presentedthe optimal velocity car-following model,
xn(t + T ) = V opt(∆xn(t)), (2)
where V opt is called the optimal velocity function, and∆xn(t) = xn+1(t)− xn(t) is the headway of vehicle n
at time t. More than 30 years later, Bando et al [9]
suggested a well-known optimal velocity model,
xn(t) =V opt(∆xn(t))− xn(t)
τ, (3)
where τ is the relaxation time.In the optimal velocity model, the deceleration
and the acceleration of the vehicle are described by asimple differential equation. According to such a dif-ferential equation, the behaviour of the driver is de-pendent mainly on the headway (the distance betweentwo successive vehicles). This means that the driver isassumed to be only looking at the leader vehicle. But,in more realistic situations, the driver considers moreinformation about vehicles around him/her. Apartfrom this, the relaxation time τ in Eq.(3) is an impor-tant parameter, which must be reasonably selected toavoid the collision between two successive vehicles.
In order to reproduce traffic as realistically as pos-sible, some complex models are proposed, but theyare at the cost of introducing a large number of pa-rameters, or, losing their realistic features in the de-terministic limit. For example, the “generalized-forcemodel” with a generalized optimal velocity functionwas proposed in Ref.[10]. This model could success-fully reproduce the time-dependent gaps and veloci-ties. However, the acceleration time and decelerationtime in this model are still unrealistically small. Asa result, a great effort has been made to improve theoptimal velocity car-following model and to make itsuitable for simulating various realistic traffics.
3. Principle of the train control
system
The train control system plays a central role inrailway traffic. Usually, it is used to decide how adriver operates under safety restrictions and otherconsidered constraints. Two types of the train con-trol systems have been developed, i.e. the fixed-blocksystem and the moving block system. The fixed-blocksystem has been widely used in modern railway traf-fic for more than one century. However, as signalingtechnology is developed, the moving block system be-comes of considerable importance and will probablyreplace the fixed-block system some day.
With the moving block system, electronic commu-nications between the control centre and trains con-tinuously control the trains, and make them main-tain the safety stopping distance. In a moving blockequipped system, using the information about the ve-locities and the locations of all the trains in its area,controllers can optimize system performance and re-spond to events quickly and effectively. The advan-tages of the moving block system are that the linecapacity can be increased and the traffic fluidity andthe energy efficiency can be improved.
In the moving block system, between two succes-sive trains, the following train needs to adjust its ve-locity continuously. If the distance between two suc-cessive trains is smaller than the safety stopping dis-tance, the following train will be forced to brake toa lower velocity or stop at a site on the track line.Several types of moving block systems have been de-veloped, i.e. the moving space block, the moving timeblock and the pure moving block.[18] In the present pa-per, we employ the moving space block as the studiedblock system. Some approaches can be easily extendedto other block systems.
4. Our model
The behaviour of train movement in railway traf-fic differs from that of vehicle movement in road traf-fic. The deceleration and the acceleration of the trainare limited to a range between –2 m/s2 and 2 m/s2.But such a range in road traffic is between –3 m/s2
and 4 m/s2. The velocity relaxation time is largerthan that in city traffic and freeway traffic (realisticvelocity relaxation time is of the order of 10 s in citytraffic and 40 s in freeway traffic). In addition, the

2202 Li Ke-Ping et al Vol. 18
safety stopping distance is strongly related to the max-imum velocity and the deceleration rate of the train.Usually, the safety stopping distance xc is defined asxc = v2
max/(2b) + sm, where sm is called the safetymargin distance, vmax is the maximum velocity of thetrain and b is the deceleration rate of the train. Inorder to use the car-following model to simulate thetrain movement in railway traffic, we here improve theoptimal velocity model, and make it suitable for de-scribing train movement in railway traffic.
The car-following model proposed in Ref.[9] isa well-known optimal velocity model, where theoptimal velocity function V opt(∆xn(t)) is takenas V opt(∆xn(t)) = (vmax/2){ tanh[∆xn(t) − xc] +tanh[xc]}. Based on such a car-following model, wepropose a new improved model for simulating trainmovement. The proposed model is as follows:
xn(t) = c1[1− exp(−c2τ)]V opt(∆xn(t))− xn(t)
τ. (4)
In the above equation, we have introduced a functionc1[1− exp(−c2τ)]. This function ensures that the im-proved equation model meets the following two con-ditions: (i) the deceleration and the acceleration ofthe train are limited to a given range; (ii) a crash canbe avoided when the velocity relaxation time τ is of ahigh order. Here c1 and c2 are adjustable parameters.In simulation, we need to select reasonable values ofc1 and c2.
The dynamic behaviour of train movement neara station is more complex. When train n prepares totravel into a station, if the station in front of train n
is occupied by other trains, train n must keep awayfrom the station, otherwise, train n can travel intothe station directly. In the former case, train n main-tains a safety stopping distance from the train in frontof it, but in the latter case, the safety stopping dis-tance between train n and the station is neglected.In the former case, the optimal velocity function fortrain n is V opt(∆xn(t)) = (vmax/2){ tanh[∆xn(t) −xc] + tanh[xc]}, and in the latter case, the optimalvelocity function for train n can be simplified intoV opt(∆xn(t)) = (vmax/2){ tanh[∆xn(t)]}.
The boundary condition used in this paper isopen. Considering a single track line with a lengthof L, the boundary condition is as follows: (i) whenthe section from site 1 to site Ls is empty, a train withthe velocity vmax is created. This train immediatelytravels according to the equation model (4). Here theparameter Ls is called the departure interval, and itmust be larger than or equal to the safety stopping
distance xc. (ii) At site L, trains simply move out ofthe system. In order to compare simulation resultswith field measurements, one iteration roughly corre-sponds to 1 s, and the length of a unit is about 1 m.This means, for example, that xc = 10 units/updatecorresponds to xc = 36 km/h.
5. Simulation
We use the proposed model to simulate the trainmovement in single line railway traffic. The train con-trol system employs the moving space block system.The dynamic equation of train movement is describedby Eq.(4). The proposed equation model is suitablefor computer programming. To start with, by chang-ing the time derivative, the proposed equation modelis simplified into a discrete model. Then we iteratethe discrete equation model under the open bound-ary condition. The basic program is that at each timestep, for all trains, we use the current velocities andpositions of trains to calculate their velocities and po-sitions at the next time step.
In simulation, a system with length L = 10000is considered (L = 10000 units correspond to L =10000 m). The number of the iteration time steps isTs = 2000. One station is designed in the middle ofthe system, i.e. the station is at the site l = 5000. Asa train arrives at a station, it needs to stop for a time(say, Td) and then leaves the station. Td is called thestation dwell time. The values of c1 and c2 are relatedmainly to the maximum velocity vmax. When vmax islarger, c1 and c2 should take smaller values. On thecontrary, when vmax is smaller, c1 and c2 should takelarger values. For a given vmax, when c1 is larger, c2
should take a smaller value, and when c1 is smaller, c2
should take a larger value. Because the decelerationrate b is a variant, the safety stopping distance xc isalso a variant. But, in the process of train operation,xc usually is considered as a constant. So b in the for-mula of xc is set at a middle value of the decelerations.The velocity relaxation time τ and the safety margindistance sm are respectively set to be τ = 100 andsm = 10. After sufficient transient time, we begin torecord the data of traffic flow.
Simulation results demonstrate that when the de-parture interval Ls is large, trains can travel withoutany disturbance, and when the departure interval Ls
is small, train delays begin to emerge. In order tostudy the characteristic behaviour of train movement,

No. 6 Simulating train movement in railway traffic using a car-following model 2203
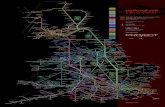
we investigate the space-time diagram of the railwaytraffic flow. Figure 1 shows part of the space-time di-agram of railway traffic flow for xc = 40. Here weplot 10000 sites in 1000 consecutive time steps. Thehorizontal direction indicates the direction in whichtrains travel forwards. The vertical direction indicatesthe evolution time step. The parameters c1 and c2 arerespectively set to be c1 = 50 and c2 = 0.001. InFig.1, the positions of trains are indicated by dots.From Fig.1, we can find that the traffic flow shown inFig.1(a) is free, where the traffic flux can be increasedby reducing the departure interval Ls, and figure 1(b)presents complex traffic flow where train delays movebackwards.
In the present paper, we focus on the case wherethe departure interval Ls is small. Under such acondition, we can observe how trains change theirvelocities, and maintain the safety stopping distancebetween them. In Fig.1(b), all trains start from thedeparture site, i.e. the site l = 1, and then arrive atthe station, i.e. the middle site l = 5000. After thestation dwell time Td, they leave the station. Whenthey arrive at the arrival site, i.e. the site l = 10000,they leave the system immediately. Before the sta-tion, the train delays form and propagate backwards.During the train delays propagating backwards, theirtime intervals stopping at track increase. This is the
Fig.1. Local space-time diagram of railway traffic flow with
(a) Ls = 2xc and Td = 10, and (b) Ls = xc and Td = 20.
characteristic behaviour of train movement when thedeparture interval Ls is small.
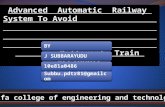
Complex dynamic behaviour of train movementoccurs near a station. When a train passes through astation, it needs to stop to enable passengers to boardand alight. In this process, it needs to accelerate anddecelerate continuously. If the station dwell time Td
is large, the train delays possibly form and propagatebackwards. Figure 2 shows the local space-time di-agram, which displays the positions and velocities ofthe trains near a station. Here numbers represent thevelocities of trains. The values of c1 and c2 are setto be c1 = 100 and c2 = 0.001. From Fig.2, we canclearly see that as train C stops at the station, trainD that is directly behind train C needs to deceler-ate, and then stops at the site in front of train E. Astime goes on, a number of trains before train C aredelayed. These results demonstrate that the proposedmodel can successfully capture the expected delays inrailway traffic.
Fig.2. A diagram displaying the positions and velocities
of trains for xc = 15, Ls = xc and Td = 100.
As mentioned in Section 4, when a train travelsfrom one station to another, its deceleration and ac-celeration are limited to a range between –2 m/s2 and2 m/s2. Using the proposed model, the decelerationand acceleration of trains can be made to enter intosuch a given range by controlling the values of c1 andc2. The relevant results are presented in Fig. 3. Herewe record the decelerations and accelerations of alltrains at all times. The parameters xc, c1 and c2 arethe same as those used in Fig.1. From Fig.3, we cansee that the acceleration of trains is in the range be-tween 0 and 2 m/s2, and the deceleration of trains isin the range between –2 m/s2 and 0 m/s2. In general,the higher the values of c1 and c2 are, the larger therange limiting the deceleration and acceleration willbe.

2204 Li Ke-Ping et al Vol. 18
Fig.3. Acceleration and deceleration of trains for Ls = xc
and Td = 20.
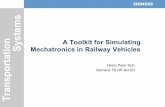
In reality railway traffic, one of the im-portant factors which affects train movement isthe safety stopping distance. With the movingblock system, the safety stopping distance be-tween two successive trains must be maintained.For example, when the distance between two suc-cessive trains is smaller than the safety stop-ping distance, the following train must decelerate.
Fig.4. Distribution of distance headway for xc = 40,
Ls = xc and Td = 20.
In order to further test the proposed model, we mea-sure the distribution of the distance headway ∆si ata given time, where ∆si is the distance from train i
to train i + 1. Figure 4 shows the distribution of thedistance headway at time t = 1000, where the solidline denotes the measurement results, and the dot-ted line represents the safety stopping distance. InFig.4, at time t = 1000, there are 4 trains traveling onthe single line. From Fig.4, it is obvious that all themeasurement results are larger than the safety stop-ping distance. The simulation results indicate thatthe proposed model is an effective tool for simulatingtrain movement.
6. Conclusions
We proposed an improved car-following model forsimulating the train movement in railway traffic. Byiterating the proposed equation model, we simulatethe train movement under the moving block systemcondition. The numerical simulation results indicatethat the proposed model can describe well the trainmovement in railway traffic. Not only can the dy-namic behaviour of train movement be described, butalso some complex phenomena observed in real railwaytraffic, such as the train delays, can be reproduced.
In a practical train control system, train move-ment is restricted by several factors, such as the trackgeometry, traction equipment, train length, etc. In theproposed model, some factors have not been consid-ered, thereby leading to the simplification of the trainmovement calculation. Although the proposed modelis simplified, it can reproduce some characteristic be-haviours of train movement, moreover it provides anew approach for the further analysis and evaluationof train control systems.
References
[1] Petar K and Guedial S 1972 IEEE Trans. Auto. Contr.
17 92
[2] Howlett P G and Cheng J 1997 J. Austr. Math. Soc. Series
B 38 388
[3] Cheng J, Davydova Y, Howlett P and Pudney P 1999 IMA
J. Math. Appl. Busin. Ind. 10 89
[4] Liu R F and Golovitcher I M 2003 Trans. Res. Part A 37
917
[5] Howlett P 2000 Ann. Oper. Res. 98 65
[6] Pipes L A 1953 J. Appl. Phys. 24 274
[7] Chandler R E, Herman R and Montroll E W 1958 Oper.
Res. 6 165
[8] Newell G F 1961 Oper. Res. 9 209
[9] Bando M, Hasebe K and Nakayama A 1995 Phys. Rev. E
51 1035
[10] Helbing D and Tilch B 1998 Phys. Rev. E 58 133
[11] Treiber M, Hennecke A and Helbing D 2000 Phys. Rev. E
62 1805
[12] Tomer E, Safonov L and Havlin S 2000 Phys. Rev. Lett.
84 382
[13] Li Z P and Liu Y C 2006 Chin. Phys. 15 1570
[14] Li L and Shi P F 2005 Chin. Phys. 14 576
[15] Komatasu T and Sasa S 1995 Phys. Rev. E 52 5574
[16] Nagatani T 1999 Phys. Rev. E 60 6395
[17] Sawada S 2001 J. Phys. A: Math. Gen. 34 11253
[18] Pearson L V 1973 Moving-block Signalling Ph.D. Thesis,
Loughborough University of Technology, England