SIMOCRANE 3 Truck Positioning System (TPS) 4 · SIMOCRANE TPS Version 1.1 08/2012 Preface...
202
Truck Positioning System (TPS) ___________________ ___________________ ___________________ ___________________ ___________________ ___________________ ___________________ ___________________ ___________________ ___________________ ___________________ ___________________ ___________________ ___________________ SIMOCRANE Truck Positioning System (TPS) Operating Instructions applies to SIMOCRANE TPS Version 1.1 08/2012 Preface Introduction 1 Description 2 Application planning 3 Mechanical installation 4 Electrical installation 5 Operator interface (HMI) 6 Preparation of the sensor controller 7 Coordinates, dimensions, parameters 8 Interface to the crane controller 9 The TPS START commissioning tool 10 Commissioning 11 Troubleshooting / FAQs 12 Appendix A
Transcript of SIMOCRANE 3 Truck Positioning System (TPS) 4 · SIMOCRANE TPS Version 1.1 08/2012 Preface...

� �Truck Positioning System (TPS)
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
SIMOCRANE
Truck Positioning System (TPS)
Operating Instructions
applies to SIMOCRANE TPS Version 1.1
08/2012
Preface
Introduction 1
Description 2
Application planning 3
Mechanical installation 4
Electrical installation 5
Operator interface (HMI) 6
Preparation of the sensor controller
7
Coordinates, dimensions, parameters
8
Interface to the crane controller
9
The TPS START commissioning tool
10
Commissioning 11
Troubleshooting / FAQs 12
Appendix A

Siemens AG Industry Sector Postfach 48 48 90026 NÜRNBERG GERMANY
Ⓟ 08/2012 Technical data subject to change
Copyright © Siemens AG 2008 - 2012.All rights reserved
Legal information Warning notice system
This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are graded according to the degree of danger.
DANGER indicates that death or severe personal injury will result if proper precautions are not taken.
WARNING indicates that death or severe personal injury may result if proper precautions are not taken.
CAUTION indicates that minor personal injury can result if proper precautions are not taken.
NOTICE indicates that property damage can result if proper precautions are not taken.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to property damage.
Qualified Personnel The product/system described in this documentation may be operated only by personnel qualified for the specific task in accordance with the relevant documentation, in particular its warning notices and safety instructions. Qualified personnel are those who, based on their training and experience, are capable of identifying risks and avoiding potential hazards when working with these products/systems.
Proper use of Siemens products Note the following:
WARNING Siemens products may only be used for the applications described in the catalog and in the relevant technical documentation. If products and components from other manufacturers are used, these must be recommended or approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation and maintenance are required to ensure that the products operate safely and without any problems. The permissible ambient conditions must be complied with. The information in the relevant documentation must be observed.
Trademarks All names identified by ® are registered trademarks of Siemens AG. The remaining trademarks in this publication may be trademarks whose use by third parties for their own purposes could violate the rights of the owner.
Disclaimer of Liability We have reviewed the contents of this publication to ensure consistency with the hardware and software described. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the information in this publication is reviewed regularly and any necessary corrections are included in subsequent editions.

Truck Positioning System (TPS) Operating Instructions, 08/2012 3
Preface
This document is aimed at readers who are interested in the SIMOCRANE Truck Positioning System and at engineers who are tasked with commissioning the system. To understand the content of this manual, you will require a basic knowledge of procedures and technical terms associated with hoisting gear as well as a basic knowledge of automation system terminology.
For an overview of the most important information contained in this manual, refer to the chapter titled Introduction (Page 13).
Prerequisite (range of validity) This manual is valid for the application with SIMOCRANE TPS V1.1 in conjunction with SIMATIC NET IE SOFTNET 2008.
Scope of supply The SIMOCRANE Truck Positioning System (TPS) comprises the following components:
Sensor controller
● SIMATIC IPC for DIN-rail mounting, e.g. in the switchgear room of a crane, installed and preconfigured for plug and play, contains:
– SIMATIC NET OPC server
– TPS START
– TPS Runtime
3D sensor
● 3D sensor (Lase GmbH type 3D-LMS221), consisting of:
– Laser scanner LMS221-30206 (outdoor) (SICK AG)
– Servo drive (Schunk)
– Weather protection hood for the LMS221 (special design for this application)
– HARTING plugs for the connection of power supply cables and data leads
Order numbers
Package Order No. SIMOCRANE TPS sensor controller
6GA7220-1AA00-0AB0
SIMOCRANE TPS 3D sensor
6GA7221-1AA21-0AB0

Preface
Truck Positioning System (TPS) 4 Operating Instructions, 08/2012
Versions The system must be operated with the software versions specified below or later versions.
Sensor controller:
Component Subcomponent Version number SIMATIC IPC 427C (Microbox PC) 427C Microsoft Windows operating system XP Professional SP3 SIMOCRANE TPS Runtime V1.1 SIMOCRANE TPS START V1.1 SIMATIC NET IE SOFTNET-S7 Lean 2008 Edition SIMATIC NET IE SOFTNET-S7 Basic 2008 Edition
3D sensor:
Component Subcomponent Version number Schunk servo motor PDU 110 Software/firmware V5.3 / FW 1.3.1 SICK, laser scanner LMS221-30206
Firmware X01.46
Device identification data Enter the identification data of the various devices so that we can assist you more quickly in a service case.
● Sensor controller
– Order number: 6GA7220-1AA00-0AB0
– Microsoft Windows Product Key (You will find the Certificate of Authenticity (COA) label in the device.) ……………………………………….
● Ethernet address 1
– In the BIOS setup (<F2> key) under Main → Hardware Options → Ethernet Address
● Ethernet address 2
– In the BIOS setup (<F2> key) under Main → Hardware Options → Ethernet Address

Preface
Truck Positioning System (TPS) Operating Instructions, 08/2012 5
● 3D sensor_0 (You will find the type label in the device.)
– Order number of the device: 6GA7221-1AA21-0AB0
– Serial number: …………………………………………….
– CAN device ID: …………………………………………….
● 3D sensor_1 (You will find the type label in the device.)
– Order number of the device: 6GA7221-1AA21-0AB0
– Serial number: …………………………………………….
– CAN device ID: …………………………………………….
Hotline and Internet addresses If you have any technical questions, please contact our hotline (worldwide):
A&D Technical Support:
● Phone.: +49 (180) 50 50 222
● Fax: +49 (180) 50 50 223
● E–mail: [email protected]
● Internet: (https://support.automation.siemens.com/WW/llisapi.dll?aktprim=5&lang=en&referer=%2fWW%2f&func=cslib.csinfo&siteid=csius&groupid=4000002&extranet=standard&viewreg=WW&nodeid5=38718979&objaction=csopen)
If you have any questions, suggestions or corrections regarding the documentation, please fax or e-mail them to:
● Fax: +49 (9131) 98 2176
● E–mail: [email protected]
Siemens Internet address The latest information about SIMOCRANE products and product support can be found in the Internet at: (http://www.siemens.com/cranes)

Preface
Truck Positioning System (TPS) 6 Operating Instructions, 08/2012
Application notes Available in the Internet at: (http://support.automation.siemens.com/WW/view/en/48342008/136000)
Latest information about SIMOCRANE products Available in the Internet at: (http://support.automation.siemens.com/WW/view/en/10807397/130000)
Further assistance We offer training courses to help you get started with the Truck Positioning System (TPS). For further information, contact:
Siemens Industry DT MC Cranes application support E–mail: [email protected]

Truck Positioning System (TPS) Operating Instructions, 08/2012 7
Contents
Preface ...................................................................................................................................................... 3
1 Introduction.............................................................................................................................................. 13
2 Description............................................................................................................................................... 15
2.1 Impetus for system development.................................................................................................15
2.2 Positioning sequence...................................................................................................................16
2.3 System components ....................................................................................................................17 2.3.1 Sensor controller..........................................................................................................................18 2.3.2 3D sensor.....................................................................................................................................19 2.3.3 Crane controller............................................................................................................................20 2.3.4 Signaling system..........................................................................................................................21
2.4 How it works.................................................................................................................................21
3 Application planning................................................................................................................................. 23
3.1 Ambient conditions.......................................................................................................................23
3.2 Number of 3D sensors .................................................................................................................23 3.2.1 Coverage calculation ...................................................................................................................24 3.2.1.1 Coverage area and range............................................................................................................25 3.2.1.2 Coverage area and angle ............................................................................................................26 3.2.1.3 A summary of the coverage calculation principles.......................................................................27 3.2.2 3D distance calculation ................................................................................................................27 3.2.3 Calibration....................................................................................................................................29 3.2.4 Accuracy ......................................................................................................................................30 3.2.5 Calculating the number of 3D sensors in the example ................................................................30 3.2.6 Number and positions of the 3D sensors.....................................................................................31
4 Mechanical installation............................................................................................................................. 33
4.1 Assembly safety device lug..........................................................................................................33
4.2 Assembly swivel angle limitation..................................................................................................33
4.3 Mounting the 2D laser scanner ....................................................................................................33
4.4 Mounting the 3D sensor...............................................................................................................34
4.5 Sensor controller..........................................................................................................................38 4.5.1 Mounting positions .......................................................................................................................38 4.5.2 Types of installation .....................................................................................................................40
5 Electrical installation ................................................................................................................................ 43
5.1 Power supply................................................................................................................................44 5.1.1 3D sensor.....................................................................................................................................45 5.1.2 SIMOCRANE sensor controller....................................................................................................46 5.1.2.1 Connection elements ...................................................................................................................46 5.1.2.2 On/Off switch................................................................................................................................47 5.1.2.3 Connecting the 24 V DC power supply........................................................................................47

Contents
Truck Positioning System (TPS) 8 Operating Instructions, 08/2012
5.1.2.4 Connection for equipotential bonding ......................................................................................... 48
5.2 Data interfaces ............................................................................................................................ 49 5.2.1 3D sensor.................................................................................................................................... 49 5.2.2 CAN interface.............................................................................................................................. 50 5.2.3 RS 422 interface ......................................................................................................................... 52 5.2.4 Summary of data cables ............................................................................................................. 53
6 Operator interface (HMI) .......................................................................................................................... 55
6.1 Requirements of the Truck Positioning HMI ............................................................................... 55 6.1.1 Data to be supplied by the Truck Positioning HMI...................................................................... 55 6.1.2 Link to the Truck Positioning System.......................................................................................... 56
6.2 The Truck Positioning HMI in SIMOCRANE CMS...................................................................... 56
6.3 Operating modes......................................................................................................................... 57 6.3.1 System Off................................................................................................................................... 57 6.3.2 Calibration ................................................................................................................................... 58 6.3.3 Truck positioning ......................................................................................................................... 59 6.3.4 Cold restart.................................................................................................................................. 60
7 Preparation of the sensor controller ......................................................................................................... 63
7.1 Restoring the basic setting of the SIMOCRANE sensor controller ............................................. 63
7.2 Connection with the service PC .................................................................................................. 65
8 Coordinates, dimensions, parameters ..................................................................................................... 71
8.1 The coordinate systems.............................................................................................................. 71 8.1.1 The TPS coordinate system........................................................................................................ 71 8.1.2 The OPC coordinate system for data exchange with the crane controller ................................. 73 8.1.3 Coordinate systems of trucks and container trailers................................................................... 74
8.2 Crane (calibration)....................................................................................................................... 74
8.3 Lanes........................................................................................................................................... 78
8.4 Working area of the 3D sensor ................................................................................................... 80
8.5 Vehicles....................................................................................................................................... 81 8.5.1 Trucks.......................................................................................................................................... 82 8.5.2 Container trailer........................................................................................................................... 84
8.6 Container..................................................................................................................................... 86
9 Interface to the crane controller ............................................................................................................... 87
9.1 Data assignment with scores7.txt ............................................................................................... 87
9.2 Configuring the SIMATIC NET OPC server ................................................................................ 88 9.2.1 Adapting the hardware configuration – Ethernet......................................................................... 88 9.2.2 Adapting the hardware configuration – PROFIBUS.................................................................... 89 9.2.3 Configuring the network – Ethernet............................................................................................. 91 9.2.4 Configuring the component configurator..................................................................................... 94 9.2.5 Checking the connection............................................................................................................. 95
9.3 Input data TPS ............................................................................................................................ 97 9.3.1 Lane Number Words ................................................................................................................... 99 9.3.2 Sensor Modus words ................................................................................................................ 100 9.3.3 Crane Status words................................................................................................................... 102

Contents
Truck Positioning System (TPS) Operating Instructions, 08/2012 9
9.3.4 Crane handshake.......................................................................................................................103 9.3.5 Actual Hoist Position ..................................................................................................................104 9.3.6 Actual Trolley Position ...............................................................................................................104 9.3.7 Actual Gantry Position ...............................................................................................................104 9.3.8 Actual Slew position...................................................................................................................104 9.3.9 General spreader status words..................................................................................................105 9.3.10 Spreader Status Landside words...............................................................................................106 9.3.11 Spreader Status Waterside words .............................................................................................107
9.4 Output data TPS ........................................................................................................................108 9.4.1 Sensor Status word....................................................................................................................109 9.4.2 Servo Status word......................................................................................................................110 9.4.3 Sensor mode status word ..........................................................................................................112 9.4.4 Truck Positioning System status word.......................................................................................113 9.4.5 Truck Positioning System Handshake .......................................................................................114 9.4.6 Calibration status word ..............................................................................................................114 9.4.7 Lane status words......................................................................................................................115 9.4.8 Landside / Waterside Vehicle Type ...........................................................................................116 9.4.9 Landside/waterside actual position............................................................................................116 9.4.10 Landside/waterside status cold restart ......................................................................................116
9.5 Control of the TPS system.........................................................................................................117 9.5.1 Mode calibration.........................................................................................................................118 9.5.2 Positioning mode .......................................................................................................................118 9.5.2.1 Flowchart for positioning ............................................................................................................119 9.5.3 Cold restart mode ......................................................................................................................124
10 The TPS START commissioning tool..................................................................................................... 125
10.1 Overview of the user interface ...................................................................................................126
10.2 Menu Bar....................................................................................................................................126
10.3 The command bar......................................................................................................................127
10.4 The Navigator.............................................................................................................................127
10.5 The working area .......................................................................................................................128 10.5.1 The "Overview" tab ....................................................................................................................128 10.5.2 The "Parameter list" tab .............................................................................................................130 10.5.3 The "3D View" tab......................................................................................................................132 10.5.3.1 The "Calibration / Lanes" tab .....................................................................................................133 10.5.3.2 The "Vehicle models" tab...........................................................................................................134 10.5.3.3 The "Position monitoring" tab.....................................................................................................134
10.6 The detail display .......................................................................................................................135 10.6.1 The "Faults and alarms" tab.......................................................................................................135 10.6.2 The "Control panel" tab..............................................................................................................136 10.6.3 The "Symbol browser" tab .........................................................................................................137 10.6.4 The "Recording" tab...................................................................................................................138 10.6.5 The "Logging" tab.......................................................................................................................138 10.6.6 The "Output TPS START" tab....................................................................................................139 10.6.7 The "Output TPS Runtime" tab ..................................................................................................139
10.7 The Status Bar ...........................................................................................................................140
11 Commissioning ...................................................................................................................................... 141

Contents
Truck Positioning System (TPS) 10 Operating Instructions, 08/2012
11.1 Sample configuration ................................................................................................................ 141
11.2 Preconditions ............................................................................................................................ 142
11.3 Checklists .................................................................................................................................. 142
11.4 Procedure.................................................................................................................................. 143
11.5 Activate online operation: TPS START via Ethernet ................................................................ 143 11.5.1 Starting the Program................................................................................................................. 143 11.5.2 Connection to TPS Runtime...................................................................................................... 144 11.5.3 Ending the connection with TPS Runtime................................................................................. 144
11.6 Connection to the crane controller ............................................................................................ 145 11.6.1 Configuring and parameterizing the OPC server...................................................................... 145 11.6.2 Checking the exchanged data .................................................................................................. 146 11.6.3 Parameterization of the OPC server used by TPS Runtime..................................................... 146 11.6.4 Check the connection to the crane controller............................................................................ 147
11.7 Commissioning the terminals for communication with the crane controller.............................. 148 11.7.1 2D laser scanner ....................................................................................................................... 148 11.7.1.1 RS422 interface settings ........................................................................................................... 148 11.7.1.2 2D laser scanner settings.......................................................................................................... 149 11.7.1.3 Checking the settings................................................................................................................ 149 11.7.2 Servo motors............................................................................................................................. 151 11.7.2.1 Settings for the CAN interfaces................................................................................................. 151 11.7.2.2 Settings for CAN Channel and ESD CAN Channel .................................................................. 151 11.7.2.3 Device settings.......................................................................................................................... 152 11.7.2.4 Checking the settings................................................................................................................ 153 11.7.3 3D sensor.................................................................................................................................. 154 11.7.3.1 Checking the assignment of the 2D laser scanner to servo motor ........................................... 154
11.8 Automatic calibration of the 3D sensor ..................................................................................... 156 11.8.1 Preparations for calibration ....................................................................................................... 156 11.8.2 Visual inspection of the set parameters .................................................................................... 158 11.8.3 Example: Adapting the sill beam size ....................................................................................... 161 11.8.4 Checking the mounting angle of the 3D sensors ...................................................................... 166
11.9 Lanes......................................................................................................................................... 167 11.9.1 Determining and marking the y origin ....................................................................................... 168 11.9.2 Configuring the lanes ................................................................................................................ 168 11.9.3 Working area of the 3D sensors ............................................................................................... 171 11.9.4 Coordinate conversion between crane controller and TPS ...................................................... 172 11.9.4.1 Single spreader or tandem spreader? ...................................................................................... 173 11.9.5 Checking the lane settings........................................................................................................ 173
11.10 Truck models............................................................................................................................. 174 11.10.1 Creating truck models ............................................................................................................... 174
11.11 Container trailer models ............................................................................................................ 179 11.11.1 Creating container trailer models .............................................................................................. 179
11.12 Positioning................................................................................................................................. 182 11.12.1 Check the position calculation................................................................................................... 183 11.12.2 Checking the coincidence signal............................................................................................... 184
11.13 Alternate system configurations................................................................................................ 185
12 Troubleshooting / FAQs......................................................................................................................... 187

Contents
Truck Positioning System (TPS) Operating Instructions, 08/2012 11
12.1 General problems ......................................................................................................................187
12.2 No connection to the crane controller ........................................................................................191
A Appendix................................................................................................................................................ 193
A.1 List of abbreviations ...................................................................................................................193
A.2 Installation checklist for the Truck Positioning System..............................................................194
A.3 STS calibration parameter values form .....................................................................................198
A.4 STS lanes parameter values form .............................................................................................199
A.5 Glossary .....................................................................................................................................200
A.6 ESD information.........................................................................................................................201

Contents
Truck Positioning System (TPS) 12 Operating Instructions, 08/2012

Truck Positioning System (TPS) Operating Instructions, 08/2012 13
Introduction 1
The Truck Positioning System is primarily intended for installation on ship-to-shore container cranes. It is designed to provide better protection for operators and to increase the efficiency of container handling procedures. In principle, the system can also be used on other types of crane where pre-identified trucks need to be positioned. The conditions of application with respect to installation and design must be evaluated when the system is used on other crane types.
These instructions describe the entire Truck Positioning System step by step. They start with a description of its operating principle and go on to provide instructions on crane installation, commissioning of individual components, and finally commissioning of the system as a whole.
If you want some initial information about the system's design, operating principle, and suitability for your requirements, please read Chapters Description (Page 15), Application planning (Page 23), and Operator interface (HMI) (Page 55).
If you are looking for details on the mechanical and electrical installation of the Truck Positioning System, please read Chapters Mechanical installation (Page 33) to Electrical installation (Page 43).
Section Coordinates, dimensions, parameters (Page 71) is particularly relevant as preparation for commissioning. Checklists for the commissioning can be found in the Appendix (Installation checklist for the Truck Positioning System (Page 194)) as well as forms for the acquisition of the parameter values (STS calibration parameter values form (Page 198) and STS lanes parameter values form (Page 199)).
If you wish to commission the system with a sensor controller that has the necessary software installed but the operating system settings deviate from the preconfigured values, please also read Preparation of the sensor controller (Page 63).
To restore your sensor controller configuration to the shipped state, please contact the support line. To save system-specific data, use the "Save parameter list" command; see Chapter The command bar (Page 127) and Figure 10-8 Versions of the parameter list (Page 131).

Introduction
Truck Positioning System (TPS) 14 Operating Instructions, 08/2012

Truck Positioning System (TPS) Operating Instructions, 08/2012 15
Description 2
This chapter describes the purpose, design and basic operating principle of the system. It is designed to give you a general understanding of the Truck Positioning System.
2.1 Impetus for system development Ship-to-shore cranes are used in numerous ports around the world to handle containers. Containers are transported from the crane to the storage area by various types of vehicle. Manually operated truck-trailer combinations are frequently used for this purpose.
Positioning the truck trailer correctly under the crane is particularly challenging, as the crane is lined up with the container row on the ship and must not move along the quay wall while containers are being loaded/unloaded.
Loading and unloading containers frequently involves numerous different combinations of truck and container trailer. This means that there is no clearly defined position at which a driver of a truck can stop to ensure easy loading or unloading of a container. Since the driver cannot determine the optimum stop position from the vehicle's cabin, he needs to be directed into the correct position.
Until now, the driver was directed into position by an instructor (or "checker") moving between the lanes giving manual positioning instructions. The system described in this document can perform this task fully automatically which means that operators are no longer required to work in the danger area under cranes.
Other advantages of an automatic positioning system is that it allows a continuous flow of vehicles, thereby minimizing the wear on trucks (gear unit wear is reduced, for example) and trailers, and it largely eliminates the risk of damage to trailers and trucks caused by loading in the wrong position. What is more, efficient use speeds up container handling.

Description 2.2 Positioning sequence
Truck Positioning System (TPS) 16 Operating Instructions, 08/2012
Figure 2-1 Positioning a truck with trailer
2.2 Positioning sequence The truck travels under the crane for loading or unloading along a lane specified by the user (e.g. crane operator). As the vehicle approaches, the system detects the truck and trailer and automatically determines the optimum stop position. It continuously reads the current position of the truck trailer, calculates its distance from the target stop position and transfers these data to the crane controller via Ethernet or PROFIBUS (via OPC).
A user program evaluates the transferred data and generates signals that indicate to the driver of the truck when to decelerate and when to stop. These instructions can be visualized by visual signals, such as "traffic lights" with special switching sequences, a large display on the crane or a small display in the truck. Alternatively, an acoustic signal can be used which, similar to acoustic reversing sensors on cars, "bleeps" intermittently at increasing frequency as the vehicle approaches the target position until the acoustic signal becomes continuous in the vehicle's end position.

Description 2.3 System components
Truck Positioning System (TPS) Operating Instructions, 08/2012 17
2.3 System components The TPS consists of two basic components:
● 1 SIMOCRANE TPS sensor controller
● 2 SIMOCRANE TPS 3D sensors
Note
The components may be bundled differently in the order.
Other essential components are:
● 1 crane controller (PLC)
● 1 connection to the crane controller (PROFIBUS or Ethernet)
● 1 user interface (HMI; e.g. SIMOCRANE CMS Lite or SIMOCRANE CMS)
● 1 signal system
● 1 service PC for commissioning (Windows XP Professional SP3 and higher)
Figure 2-2 Schematic diagram of a Truck Positioning System

Description 2.3 System components
Truck Positioning System (TPS) 18 Operating Instructions, 08/2012
Note
A virus scan cannot be run while the TPS Runtime is running. A system virus scan would cause a performance impairment of the system and thus also of the TPS Runtime. This means no virus scanner is available on the SIMOCRANE sensor controller.
We strongly recommend that you check the sensor controller for viruses at regular intervals, e.g. during the maintenance of your IT, and protect your company network with a firewall.
2.3.1 Sensor controller The sensor controller is based on a SIMATIC IPC 427C. The controller performs the following functions:
● Controls the 2D laser scanners and the servo motors
● Collects raw scanner data and recognizes scanned objects
● Calculates the positions of recognized objects
● Provides a command and data interface to the crane controller and for operator inputs
The sensor controller must be connected to the crane controller via Ethernet or PROFIBUS. It is installed either in a control cubicle in the crane's switchgear room or in a cubicle in the checker cabin. It is advisable to install the sensor controller as close as possible to the 3D sensors to minimize the length of supply cables. The sensor controller is shipped with pre-installed software so that software installation and configuration is a very quick process. The sensor controller also offers reserve capacity for future applications with a functional scope beyond the SIMOCRANE Truck Positioning System.
Figure 2-3 SIMOCRANE sensor controller (SIMATIC IPC 427C)
The SIMOCRANE sensor controller is connected to the SIMOCRANE 3D sensor via two interfaces:
● RS422 interface for the 2D laser scanner
● CAN interface for the servo motor

Description 2.3 System components
Truck Positioning System (TPS) Operating Instructions, 08/2012 19
2.3.2 3D sensor The 3D sensors are mounted on support platforms attached to the crossbeams (portal beams) of the crane. The scanners face downwards onto the loading/unloading lanes below the crane.
A 3D sensor consists of one 2D laser scanner, a servo motor, and a swiveling platform. The 2D laser scanner can be swiveled by the servo motor in order to extend its scan range by the third dimension. The servo motor and 2D laser scanner are mounted on the swiveling platform which connects both components mechanically so that the 2D laser scanner is rotatable. The two components are wired inside the platform in such a way that the power connections and communications interfaces of the individual components are each brought out to a common connector.
The 2D laser scanner measures the distance to objects by emitting a pulsed laser beam which is reflected by objects within range.
The (2D) polar coordinates of the individual measuring points are transferred in real time to the sensor controller for evaluation. In 3D operation, the second angle required for a 3D polar coordinate is defined by the servo motor setting.
The scan range of the 2D laser scanners covers the length of the loading/unloading lanes. The dimensional extension provided by the servo motors enables the laser scanners to be aligned for positioning on different lanes.

Description 2.3 System components
Truck Positioning System (TPS) 20 Operating Instructions, 08/2012
① Swiveling platform ② 2D laser scanner ③ Servo motor with housing
Figure 2-4 Components of the 3D sensor
2.3.3 Crane controller
Note
The scope of supply of SIMOCRANE TPS does not include a crane controller.
The crane controller provides TPS data about the state of the crane and itself receives data about the status of the TPS and the positioning status. Data exchange between the sensor controller and the crane controller is platform-neutral and handled by an OPC server on the sensor controller using Ethernet or PROFIBUS.
The crane controller is also responsible for controlling the signaling system for the driver of the truck.
To solve these two tasks, a program which is capable of initializing transfer of crane data to the OPC interface and controlling the signaling system must be implemented in the crane control.

Description 2.4 How it works
Truck Positioning System (TPS) Operating Instructions, 08/2012 21
2.3.4 Signaling system
Note
The scope of supply of TPS does not include a signaling system.
The signaling system provides the interface between the TPS and the driver of the truck. In its simplest form, it consists of a traffic lights display with special signal sequences that is driven by the crane controller.
The user is responsible for planning and implementing the signaling system.
2.4 How it works
① Laser beams (scan area)
Figure 2-5 Diagram showing laser scanning
When the TPS is switched on for the first time, the operator must first select an operating mode (Positioning, Calibration, or Cold Restart). In Calibration mode, all the 3D sensors search for a prominent position by which they can orient. The zero point of the coordinate system is determined in the course of calibration. This is generally a point centered below the crane (see The TPS coordinate system (Page 71)).
In Positioning mode, the system continuously checks a defined lane in a defined approach direction for the presence of trucks and / or container trailers. For this, the 3D sensor is aligned with the defined lane and 2D scans are continuously recorded and evaluated.
If a truck is detected, the TPS can calculate an initial target position and start the checking procedure. As it approaches, the system detects the truck, the container trailer, and the container (model recognition) with which it determines the precise position.
Once the system has recognized a container or trailer, it derives the exact target position plus the deviation of the actual position from the target. The crane controller can then evaluate this distance and drive the signaling system for the driver of the truck accordingly.

Description 2.4 How it works
Truck Positioning System (TPS) 22 Operating Instructions, 08/2012
When the truck leaves the monitored area again, either because it has been successfully positioned or because it has moved sideways into the next lane (e.g. if the truck has simply used the lane to maneuver), the system detects this and continues searching for other approaching trucks.

Truck Positioning System (TPS) Operating Instructions, 08/2012 23
Application planning 3
Carefully prepare commissioning of the TPS. Only in this way can you ensure fast commissioning and smooth functioning of the system.
3.1 Ambient conditions For the Truck Positioning System to work successfully, a variety of local ambient conditions must be parameterized.
The following dimensions are required for parameter settings:
● Height of the portal beam of the crane above the lanes or mounting height of the 3D scanners
● Distance of the 3D laser scanners from the sill beams of the crane gantry (waterside and landside)
● Number and positions of lanes under the crane (referred to the center point between the sill beams of the crane gantry)
● Maximum spreader hoisting height (above the lanes) at which the 3D sensors will still have an unobstructed view.
These dimensions can either be taken from the crane construction drawing or measured in situ.
Furthermore, the TPS requires a reference coordinate with the coordinate system that is valid on the OPC interface, see Coordinate conversion between crane controller and TPS (Page 172).
3.2 Number of 3D sensors The number of 3D scanners required depends on the features of the individual installation. It must be ensured that the TPS functions on every lane.

Application planning 3.2 Number of 3D sensors
Truck Positioning System (TPS) 24 Operating Instructions, 08/2012
The calculations are based on the information given in Sections Coverage calculation (Page 24) and 3D distance calculation (Page 27). These are explained below. The impact of crane color on the accuracy of the test reference process is described in Calibration (Page 29) and the accuracy calculation is described in Accuracy (Page 30).
Note
In the current edition, the TPS is configured for use of two 3D sensors. In future versions, it will be possible to scale the number of 3D sensors.
Using the calculations described below, you will be able to verify whether the current software version with two 3D laser scanners will meet your requirements.
For an approximate guide value, please refer to Number and positions of the 3D sensors (Page 31) .
3.2.1 Coverage calculation The coverage calculation determines how many lanes can be covered by a single 3D sensor mounted at a specific height. This calculation is based on simple trigonometric features which can be determined using tangent or Pythagoras' theorem.
Figure 3-1 Spot diameter
The above diagram shows that the spot diameter increases as a function of the distance between laser and object. As soon as the spot diameter becomes larger than the object, the 3D sensor will have problems recognizing objects; see diagram below.

Application planning 3.2 Number of 3D sensors
Truck Positioning System (TPS) Operating Instructions, 08/2012 25
Figure 3-2 Spot diameter larger than object
The 3D sensor must detect the entire profile of the container trailer in order to be able to distinguish between different types of container trailer. The more container trailer types that are in use around the cargo handling area, the more details will be required for safe detection. For a maximum of four vehicle types, the scanner can be mounted at a maximum height of 19 m, for more than four vehicle types the maximum mounting height is 15 m.
It must also be taken into account that the 3D sensor can cover the lanes below up to a maximum angle of 35° to the left and to the right. At an angle greater than 35°, the beam would hit the objects at too shallow an angle and the accuracy of the reflected beam would be impaired. Furthermore, obstacles (such as another truck) would be more likely to obscure the truck in the adjacent lane.
3.2.1.1 Coverage area and range
Figure 3-3 Geometric analysis

Application planning 3.2 Number of 3D sensors
Truck Positioning System (TPS) 26 Operating Instructions, 08/2012
The diagram above shows the scanner range of the 3D sensor over individual lanes. In this case, the laser is mounted on the portal beam of the crane and aligned downward. "DistanceSpot" expresses the range of the 3D sensor within which the spot emitted by the 3D sensors is still small enough to recognize sufficient detail on the trailer. This variable is thus 15 m for areas with more than four vehicle types and 19 m for less than four vehicle types. The trailer height of 1.5 m is subtracted from the mounting height of the 3D sensor. On the basis of the triangle shown, the following relation can be defined using Pythagoras' theorem:
We will continue working with the equation above, but will replace the variable "Area" with the width of the lanes and the gaps between the lanes. Remember that there is always one lane gap less than the number of lanes, i.e. where there are 10 lanes, there will only be 9 gaps. Furthermore, the variable "Area" above covers only half the lanes in the diagram above. All these factors are taken into account in the following formula.
The variable "Area" is now applied in the formula above and solved according to variable "MaskedLanes". The result of this calculation is the formula below. The rounded result specifies the number of lanes that can be covered by one 3D sensor.
3.2.1.2 Coverage area and angle If the 3D sensor is mounted too low, the 3D sensor with its range of 15 m or 19 m covers an angle greater than 35° to the left and right over the lanes below. In this case, not the angle of coverage of the 3D sensor is used for calculation, but the 35° angle. Based on the triangle shown in the diagram "Geometric analysis" (see above), the following relation which takes the angle into account can be defined:
We will now develop the formula above further so as to include the geometric dimensions of the lanes in place of the variable "Area." The resulting formula is as follows:
The rounded result specifies the number of lanes that can be covered by one 3D sensor.

Application planning 3.2 Number of 3D sensors
Truck Positioning System (TPS) Operating Instructions, 08/2012 27
3.2.1.3 A summary of the coverage calculation principles To summarize the basic rules: To ensure reliable recognition of all vehicles, the following conditions apply, depending on the height at which the 3D scanner is mounted:
1. Range of the 3D sensor The scanner-to-object distance must not exceed 15 m (with more than 4 vehicle types) or 19 m (with fewer than 4 vehicle types).
2. Angle of rotation of the 3D sensor The 3D sensor must not be swiveled by more than 35°.
The swivel angles or ranges of the 3D sensor thus act as limiting factors which call for different calculation variants:
Calculation 1 (example) (limiting factor: range of the 3D sensor)
● Mounting height ≥ 15 m and fewer than 4 vehicle types (range of 3D sensor 19 m) or
● Mounting height ≥ 12.2 m and more than 4 vehicle types (range of 3D sensor 15 m)
Calculation 2 (example) (limiting factor: swivel angle of the 3D sensor)
● Mounting height < 15 m and less than 4 vehicle types or
● Mounting height < 12.2 m and more than 4 vehicle types
3.2.2 3D distance calculation Here, the general range is used to recognize the truck or trailer at a certain distance for the first time without any disinction between details. The range of laser LMS221 is maximum 30 m (in the case of black objects).
This calculation is based on the outermost lane that the 3D laser still manages to cover. The 3D sensor must detect the truck for the first time at a distance of 15 m on this outermost lane if it is to identify and position the truck within the defined time. If trucks can enter the crane area from both sides, the 3D sensor must be capable of recognizing the truck at a distance of 20 m. This distance (15 m or 20 m) is represented by the variable "Direction".

Application planning 3.2 Number of 3D sensors
Truck Positioning System (TPS) 28 Operating Instructions, 08/2012
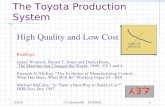
Figure 3-4 3D analysis
In the diagram above, the scan range of the 3D sensor is shown in red. The z axis describes the mounting height of the 3D sensor (14 m). The x axis extends along the lanes at ground level. The coverage calculation (see Coverage calculation (Page 24) ) may have determined, for example, that the laser can cover a total of seven lanes to the left and right of its mounting position. However, the 3D distance calculation now needs to ascertain whether the 3D sensor can read far enough forward and backward along the x axis on each lane to be able to detect trucks in good time. In this example, it would take the 3D sensor too long to detect the full profile of the two trucks on the outermost lanes. It is the function of the 3D distance calculation to check this range of the laser.
The following two formulas are applied to calculate the 3D distance. The variable "MaskedLanes" is obtained from the coverage calculation (see Coverage calculation (Page 24)). It is used in the 3D distance calculation.
● If the value calculated for variable "Distance" is < 30 m, then the variable "MaskedLanes"
obtained previously from the coverage calculation is the final result.
● If, however, the value calculated for the variable "Distance" is > 30 m, it is outside the tolerance range. In such cases, the number of lanes monitored ("MaskedLanes" variable) needs to be reduced. Keep reducing the variable "MaskedLanes" by 1 until you get a result < 30 for "Distance".

Application planning 3.2 Number of 3D sensors
Truck Positioning System (TPS) Operating Instructions, 08/2012 29
The result in the variable "MaskedLanes" specifies the number of lanes which can be covered by one 3D sensor. This can be used as the basis for calculating how many 3D sensors are needed to cover a particular number of lanes.
3.2.3 Calibration For calibration (see How it works (Page 21)), the angle of incidence and the distance between the laser beam of the outer 3D sensor and the crane foot opposite are key factors. The greater the distance, the better the laser beam needs to be reflected. Reflectivity is dependent on the color of the crane or, to be more precise, on the color of the crane surface which the laser beam scans to self-calibrate. In cases where the color needs to be changed, it is necessary to repaint only the inside faces of the crane uprights and only at the height at which the laser beam hits the uprights.
The calibration process references either the positions of the sill beams (beams alongside the lanes) or the crane feet. The following formula is used to calculate the distance between the laser and crane upright (LaserPosition) at sill beam (Sillbeam) height:
SICK has published a table in compliance with Kodak standard in which a remission value is assigned to each color. The brighter a color, the better the laser beam is reflected and thus the better the remission value. The greater the distance between the crane upright and 3D sensor, therefore, the better the remission value must be.
Table 3- 1 Crane colors
Distance between 3D sensor and crane upright
Remission values Crane color
Up to 22 m 10 % Black or lighter Up to 30 m 20 % Dark gray or lighter Up to 52 m 55 % Light gray or lighter
> 52 m >55 % White
To ensure calibration is highly accurate, the distance values in this table are set at a relatively low level.

Application planning 3.2 Number of 3D sensors
Truck Positioning System (TPS) 30 Operating Instructions, 08/2012
3.2.4 Accuracy The accuracy is calculated using the following formula:
The result specifies accuracy in cm. The complexity factor ranges from 1 to 2, where "1" indicates very good conditions and "2" very poor conditions in the cargo terminal. The parameters for estimating the complexity factor are specifically the ground surface condition, environment, vehicle types and crane color. The better the surface condition of the ground, the clearer the air, the simpler the vehicle types and the brighter the crane color, the lower the complexity factor will be.
3.2.5 Calculating the number of 3D sensors in the example The values needed to perform the calculation must also be entered in the "env" file.
● Width of the lanes: 2.8 m
● Distance between the lanes: 0.8 m
● Mounting height of the 3D sensor: 14 m
● Both directions: Yes
● More than four vehicle types: No
Apply in formula for coverage calculation 2:
Coverage calculation 2 is selected because the laser is mounted at a height of 14 m and less than 4 different types of vehicle are employed in the cargo handling area. The coverage calculation is performed with the formula for coverage calculation 2 (see above). In our example, the rounded intermediate result indicates that one 3D sensor will be able to cover five lanes.
Now perform the sample 3D distance calculation. Since we want vehicles to approach the crane from both directions, the variable "Direction" is set to 20 m. We obtain a result of 27.3 m. The distance is < 30 m and the intermediate result obtained from the coverage calculation is therefore the end result, i.e. one 3D sensor can cover seven lanes. If this result were > 30 m, the variable "MaskedLanes" would be reduced by 1 and the 3D distance calculation would have to be performed again.

Application planning 3.2 Number of 3D sensors
Truck Positioning System (TPS) Operating Instructions, 08/2012 31
3.2.6 Number and positions of the 3D sensors The table below defines the required quantity of 3D sensors as a function of the number of lanes and the selection of single-spreader or tandem-spreader mode. The table also specifies the crane color based on the distance between the last 3D sensor and the opposite crane upright at sill beam height (approximately 6 m).
The table below assumes a lane width of 3 meters and a distance between lanes of 0.8 meters.
Table 3- 2 Number of 3D sensors
Number of 3D sensors for Number of lanes1)
Single spreader Tandem spreader
Distance 3D sensor > crane
upright
Crane color
4 (14.4 m)
1 2 11 m Black or lighter
5 (18.2 m)
1 2 12 m Black or lighter
6 (22 m)
2 2 13 m Black or lighter
7 (25.8 m)
2 2 15 m Black or lighter
8 (29.6 m)
2 2 21 m Black or lighter
9 (33.4 m)
2 - 23 m Black or lighter
10 (37.2 m)
2 - 25.5 m Black or lighter
1) The values in brackets specify the operating range underneath the crane.
The values in this table provide the basis for determining how many 3D sensors are required. Please also take extreme weather and environmental conditions into account (e.g. sandstorms, heavy fog, high levels of air pollution). To incorporate these environmental requirements, it may be necessary to increase the number of 3D sensors or to reduce the number of lanes.
As the table above shows, two 3D sensors are needed for ten lanes in tandem-spreader mode, because one 3D sensor cannot scan two lanes at the same time. An alternative method of reducing the number of 3D sensors would be to park trucks sequentially. In other words, they would be positioned under the crane one after the other, although this would slow the cargo handling process. The number of 3D sensors would then be calculated in exactly the same way as for single-spreader mode.

Application planning 3.2 Number of 3D sensors
Truck Positioning System (TPS) 32 Operating Instructions, 08/2012
Figure 3-5 Positions of the 3D sensors
The diagram above illustrates how 3D sensors can be positioned for ten lanes in single-spreader mode. 3D sensor ID0 covers lanes 6 to 10 and 3D sensor ID1 covers lanes 1 to 5.
As we have selected the option "Both directions," the 3D lasers can be mounted offset on the front and rear portal beams to provide better cargo terminal coverage.

Truck Positioning System (TPS) Operating Instructions, 08/2012 33
Mechanical installation 4
Note
Before you start with actual installation: Check whether all required parts were included in the scope of supply.
4.1 Assembly safety device lug The 3D sensor is prevented from falling from its mounting position by a securing lug. A chain or a strong wire rope is fastened to the securing lug for this. The products should be delivered with the securing lug already mounted on the side flange of the 3D sensor.
If the securing lug is supplied with the 3D sensor as a separate item:
● Mount the securing lug on the 3D sensor as described in the installation guide of the 3D sensor. Also observe the figures in Section Mounting the 2D laser scanner (Page 33).
4.2 Assembly swivel angle limitation The 2D laser scanner features limit stops to protect it from mechanical damage. These limit stops prevent the laser scanner from accidentally exceeding the maximum swivel angle. thus ensuring that the laser scanner's housing does not collide with the catwalks of the base plate, which, if allowed to happen, could result in serious mechanical damage. If the positions of these limit stops need to be changed, refer to the operating instructions for the 3D sensor.
4.3 Mounting the 2D laser scanner The 2D laser scanner device for the 3D sensor is delivered in a separate box and must be mounted on the swiveling unit's support plate. The scope of delivery includes screws (hex screws M8 x 16) and washers which are suitable for attaching the scanner.

Mechanical installation 4.4 Mounting the 3D sensor
Truck Positioning System (TPS) 34 Operating Instructions, 08/2012
A detailed description is provided in the manual supplied with the laser scanner by Lase GmbH.
NOTICE Damage to the laser scanner
The maximum reach of screw on the scanner is 9 mm. If this maximum reach of screw is exceeded, the laser scanner will be damaged.
4.4 Mounting the 3D sensor
Figure 4-1 Mounted 3D sensor
The 3D sensors are designed for mounting on the inside of the crane's portal beam. A guide to determining the exact mounting location is given below. For mounting purposes, a support platform must be attached to the crane to hold the swiveling platform.
Note
Ensure that the laser scanner is mounted in the correct position in the swiveling unit. The opening for the drying agent cartridge (see arrow) must be on the side facing away from the motor housing.

Mechanical installation 4.4 Mounting the 3D sensor
Truck Positioning System (TPS) Operating Instructions, 08/2012 35
Fixing points The 3D sensor base plate features six fastening holes (Ø = 10.5 mm) for fixing the laser scanner in position at the mounting location. The following figure shows the positions of the fastening holes on the base plate.
Figure 4-2 Mounting drawing for the 3D sensor
NOTICE Safe mounting of the 3D sensor • Suitably strong stainless steel screws, e.g. M10 x 60-8.8, must be used to fix the 3D
sensor in position. • The mounting surface must be totally flat. • When mounting the 3D sensor, make sure that there are no obstacles blocking the
pivoting range in any direction. You must observe a sufficient safety clearance around the laser scanner's pivoting range.
Note
It is advisable to drill elongated fixing holes in the support platform so that it is easy to adjust the mounting angle of the laser scanner in relation to the lane.

Mechanical installation 4.4 Mounting the 3D sensor
Truck Positioning System (TPS) 36 Operating Instructions, 08/2012
Aligning the laser scanner Please particularly observe the following when aligning the 2D laser scanner:
● Mounting angle with respect to the lane
● Mounting the weather protection hood
NOTICE
Damage to the laser scanner when mounting the weather protection hood
You must use the screws supplied to mount the weather protection hood.
The maximum reach of screw on the scanner is 9 mm. If this maximum reach of screw is exceeded, the laser scanner will be damaged.
● Guarantee that the scanner can swivel freely
● Avoid any visual obstacles
● CAN ID number (see label on the 3D sensor):
– ID 16 for the 3D sensor on the land side
– ID 17 for the 3D sensor on the water side

Mechanical installation 4.4 Mounting the 3D sensor
Truck Positioning System (TPS) Operating Instructions, 08/2012 37
① Mounting the 3D sensor as close as possible to the center of the portal beam Figure 4-3 Diagrammatic representation of mounting a 3D sensor

Mechanical installation 4.5 Sensor controller
Truck Positioning System (TPS) 38 Operating Instructions, 08/2012
4.5 Sensor controller The sensor controller is designed for mounting either in a control cubicle in the switchgear room or in a control cubicle in the checker cabin. In any case, the components of the sensor controller should be installed in close proximity, that is, in the same control cubicle. To minimize the lengths of the connecting cables to the 3D sensors, it is best to install the sensor controller in a cubicle as close as possible to the 3D sensors.
4.5.1 Mounting positions
NOTICE Safe mounting of the sensor controller • The sensor controller is approved for operation in closed rooms only. • Minimum clearances to other components or the walls of a housing must be maintained
in order to ensure adequate ventilation of the sensor controller: – downward: Minimum, 100 mm – upward: Minimum, 50 mm Failure to observe these minimum clearances can cause overheating of the sensor controller.
Mounting position Permitted temperatures Horizontal (preferred position)
Operation with hard disk: • with up to 3 expansion modules
(max. load 9 W): +5 to +40°C
Operation with CompactFlash card and/or SSD: • with up to 3 expansion modules
(max. load 9 W): 0 to +45°C • with up to 3 expansion modules
(max. load 9 W) in RAL*: 0 to +50°C
Operation with Compact Flash cards: • without expansion modules in RAL*: 0 to +55°C

Mechanical installation 4.5 Sensor controller
Truck Positioning System (TPS) Operating Instructions, 08/2012 39
Mounting position Permitted temperatures Vertical (power supply at the top)
Operation with hard disk: • with up to 3 expansion modules
(max. load 9 W): +5 to +40°C
Operation with CompactFlash card: • Without expansion modules: 0 to +45°C
Operation with CompactFlash card and/or SSD: • with up to 3 expansion modules
(max. load 9 W) in RAL*: 0 to +45°C
Operation with Compact Flash cards: • with up to 3 expansion modules
(max. load 9 W) in RAL*: 0 to +50°C Note: When mounted on a DIN rail, the device should be secured to prevent shifting (e.g. with a DIN rail ground terminal).
Suspended
Operation with CompactFlash card and/or SSD and without expansion modules: 0 to +40°C Note: Mounting brackets are required if the device is suspended.
Upright mounting
Operation with hard disk: • with up to 3 expansion modules
(max. load 9 W): +5 to +40°C
Operation with CompactFlash card: • Without expansion modules: 0 to +45°C
Operation with CompactFlash card and/or SSD: • with up to 3 expansion modules
(max. load 9 W) in RAL*: 0 to +45°C
Operation with Compact Flash cards: • with up to 3 expansion modules
(max. load 9 W) in RAL*: 0 to +50°C
*RAL = Restricted Access Location (installation of device in operating facilities with restricted access, for example, a locked control cabinet)

Mechanical installation 4.5 Sensor controller
Truck Positioning System (TPS) 40 Operating Instructions, 08/2012
4.5.2 Types of installation The SIMOCRANE sensor controller can be mounted on DIN rails, with mounting brackets and in an upright position (portrait installation).
Mounting on DIN rails 1 Set the device inclined on the upper DIN rail.
2 Swing the device fully onto the rails until both
clamps completely latch.

Mechanical installation 4.5 Sensor controller
Truck Positioning System (TPS) Operating Instructions, 08/2012 41
Wall mounting (on mounting brackets) 1 Remove the four screws ② and the two mounting
clamps ① from the back of the device.
2 Install two mounting brackets ① with eight oval-
head screws on the device (mounting brackets and screws are included in the accessory kit).
Note
Examples for mounting and materials can be found in the operation instructions.
Note
Information on portrait installation is available in the supplement of the mounting accessories.

Mechanical installation 4.5 Sensor controller
Truck Positioning System (TPS) 42 Operating Instructions, 08/2012

Truck Positioning System (TPS) Operating Instructions, 08/2012 43
Electrical installation 5
This chapter describes the electrical connections of all system components. The power supply connection and data interface connections are explained in separate subchapters. Diagrams of connector pin assignments show the terminal end of the connector. "Terminal end" in this case means the side on which cables are attached to the connector.
Recommended cable types
① Power supply cable 2 x 0.75 to 2.5 mm² ② Ethernet connecting cable, CAT 5 or higher ③ Cable for connection between RS 422 and 2D laser scanner
Recommended: UNITRONIC ® Li2YCY (TP) 3 x 2 x 0.5 ④ Cable for connection between CAN and 3D sensor
Recommended: UNITRONIC ® BUS CAN UL/CSA 2 x 2 x 0.5 ⑤ Power supply cable to the 3D laser scanner
Recommended: Ölflex®Classic 110 CY 7 x 4 mm²
Figure 5-1 Diagrammatic representation of the electrical installation of a SIMOCRANE TPS system
Note
The connection cables are not part of the scope of supply!

Electrical installation 5.1 Power supply
Truck Positioning System (TPS) 44 Operating Instructions, 08/2012
5.1 Power supply Two different voltages are required to supply power to the individual components of the Truck Positioning System. Power supply units with the following voltage and current supply capacity values must be installed in the control cubicle for this purpose:
Voltage Permitted deviation Current
demand Device
Sensor controller 2D laser scanner (electronic circuits)
24 V DC electronics
± 3%, max. 0.5 V ripple
4 A
Servo motor (electronic circuits) 24 V DC heating max. 6 V ripple 6 A 2D laser scanner (heater) 48 V DC ± 3% 30 A Servo motor (drive)
The elecctronics connections for the laser scanner and the servo motor converge in the housing of the 3D sensor and do not have to be connected separately. This line requires a high-quality, stabilized power supply unit with low ripple. We recommend one of the units from the Siemens SITOP series.
Connect the 24 VDC and 48 VDC power supplies as shown in the figure below.
Note
When connecting the 24 V DC and 48 V DC power supplies, do not ground the negative terminal on the infeed side; the resulting ground loop would cause faults to occur in the operating sequence.
Figure 5-2 24 VDC and 48 VDC infeeds

Electrical installation 5.1 Power supply
Truck Positioning System (TPS) Operating Instructions, 08/2012 45
Note
When dimensioning safety equipment (fuses, circuit-protective devices), please ensure that the rated output, response characteristics and selectivity comply with local safety regulations.
Note
When installing and connecting up the power supply cables, please select suitable cables (i.e. cable type and cross section) and an installation method which complies with local safety regulations.
5.1.1 3D sensor The 3D sensor power supply cables need to be assembled. We recommend a 7 x 4 mm² shielded power supply cable. Harting Han 6 HsB sockets are provided on the scanner. We recommend the use of screw-type terminal strips at the control cubicle end.
Pin assignments for the 3D sensor power supply
① L+ servo motor (48 V) ④ M electronics (24 V) ② M servo motor (48 V) ⑤ L+ laser heater (24 V) ③ L+ electronics (24 V) ⑥ M laser heater (24 V)
Connector type for connecting the power supply to the 3D sensor: ● Insert: Harting Han 6 HsB
● Housing: Harting Han 16B – gs – M32
This set is supplied as standard with the 3D sensor. Replacements or alternative housings are available from: HARTING Deutschland GmbH & Co. KG, P.O. Box 2451, D - 32381 Minden, Germany www.harting-connectivity-networks.de/

Electrical installation 5.1 Power supply
Truck Positioning System (TPS) 46 Operating Instructions, 08/2012
5.1.2 SIMOCRANE sensor controller
5.1.2.1 Connection elements
① COM3 Serial interface (RS422) 9-pin SUB-D connection; for connecting 3D
sensor ID0 ② COM4 Serial interface (RS422) 9-pin SUB-D connection; for connecting 3D
sensor ID1 ③ CAN fieldbus 0 9-pin CAN fieldbus SUB-D connection; for connecting servo motors ④ CAN fieldbus 1 9-pin CAN fieldbus SUB-D connection; for connecting servo motors ⑤ PROFIBUS DP/MPI PROFIBUS DP/MPI interface (RS485, electrically isolated), 9-pin SUB-D
socket. ⑥ Industrial Ethernet RJ45 Ethernet connection 2 (shared PCI interrupt) for 10/100/1000
Mbps. (Interface for service and commissioning, default address IP 192.168.2.141; if possible, do not change the default address of Ethernet connection 2.)
⑦ COM1 Serial interface (RS232) 9-pin SUB-D connector ⑧ Industrial Ethernet RJ45 Ethernet connection 1 (exclusive PCI interrupt) for 10/100/1000
Mbps. (communication interface; default address IP 192.168.1.140) Note: The IP address of Ethernet connection 1 and 2 must be in different subnets (service interface; see ⑥); must be adapted to the present network configuration, if necessary.)
⑨ USB 4 x USB 2.0 connection (high speed, low current) ⑩ DVI/VGA DVI/VGA connection for CRT or LCD screen with DVI interface ⑪ PE terminal The PE terminal (M4 thread) must be connected to the protective ground
of the system in which the device is to be operated. The wire cross-section must be at least 2.5 mm2.
⑫ 24 V DC Connection for 24 V DC power supply

Electrical installation 5.1 Power supply
Truck Positioning System (TPS) Operating Instructions, 08/2012 47
5.1.2.2 On/Off switch
CAUTION The On/Off switch does not disconnect the device from the supply voltage.
Position of on/off switch Pos Description
① The on/off switch turns off the output voltages of the power supply but not disconnect from the supply system. The delivery condition is: On/Off switch turned off.
5.1.2.3 Connecting the 24 V DC power supply
To be noted before you connect the device The following regulations must be observed to ensure safe operation of the sensor controller:
WARNING The device should only be connected to a 24V DC power supply which satisfies the requirements of safe extra low voltage (SELV). A low power source (LPS) or a line-side fuse or line-side circuit-breaker is required. The power needs to be limited to a value below 4.16 A. The fuse value required: Max. 4 A.
Use the special plug supplied to connect the supply voltage. Connect the PE conductors as described in the next section.
Note
The permitted wire cross-section for the 24 V DC connection is 0.75 mm2 to 2.5 mm2.
Note
If a CompactFlash card is used in the device, make sure that the card is seated correctly before you connect it.

Electrical installation 5.1 Power supply
Truck Positioning System (TPS) 48 Operating Instructions, 08/2012
Note
To protect the hard disk from damage, we recommend supplying the sensor controller with power by means of a 24 V UPS (uninterruptible power supply). This will allow the sensor controller to be shut down properly in the event of a power failure.
Connecting 1. Switch off the 24 V DC power source.
2. Connect the power supply using the plug (included in the scope of delivery).
3. Connect the PE conductor.
5.1.2.4 Connection for equipotential bonding
NOTICE Equipotential bonding required
Equipotential bonding between two spatially separated plant parts can lead to high equalizing currents via external power supply cable, signal cable or cable to peripherals and destroy their interfaces.
To protect the device, an equipotential bonding line is required to discharge equalizing currents between device and cabinet or system in which the device is installed. The minimum cross-section of the equipotential bonding line is 2.5 mm2.
Required tool: TORX T20 screwdriver.
PE terminal 1. Connect the PE terminal (M4
thread) ① on the device with large-area contact to the equipotential bonding line. The minimum cross-section of the equipotential bonding line is 2.5 mm2.
2. Connect the equipotential bonding line with large-area contact to the protective ground conductor of the cabinet or the plant in which the device is to be installed.

Electrical installation 5.2 Data interfaces
Truck Positioning System (TPS) Operating Instructions, 08/2012 49
5.2 Data interfaces
Note
When installing and connecting up data transmission cables, please observe the appropriate requirements and recommendations defined in the transmission standard with respect to cable type and properties, installation method and permissible cable length.
5.2.1 3D sensor The data cables must be pre-assembled for connection to the 3D sensors. Sockets of type Harting Han 16E-F-s are provided on the device; we recommend the use of screw-type terminal strips at the control cubicle end. We strongly recommend the use of three separate cables for CAN IN, CAN OUT, and RS 422 at the scanner end.
Recommended cable types As a bus medium, we recommend twisted pair cables in accordance with ISO 11898-2 (High-Speed Medium Access Unit), with an impedance of 108 to 132 ohms, e.g.
● CAN bus UNITRONIC ® BUS CAN UL/CSA 2 x 2 x 0.5.
● RS4222 UNITRONIC ® Li2YCY (TP) 3 x 2 x 0.5.
Both types are available from:
U.I. LAPP GmbH, Schulze-Delitzsch-Strasse 25, 70565 Stuttgart, Germany www.lappkabel.de

Electrical installation 5.2 Data interfaces
Truck Positioning System (TPS) 50 Operating Instructions, 08/2012
Pin assignments for the 3D sensor data cables
① CAN L IN
(from the sensor controller or from pin 9 of another 3D sensor)
⑨ CAN L OUT (connection to an additional 3D sensor)
② CAN H IN (from the sensor controller or from pin 10 of another 3D sensor)
⑩ CAN H OUT (connection to an additional 3D sensor)
③ RS 422 RxD + ⑪ RS 422 RxD - ④ RS 422 TxD + ⑫ RS 422 TxD - ⑤ RS 422 shield ⑬ Reserved ⑥ Reserved ⑭ Reserved ⑦ Reserved ⑮ Reserved ⑧ CAN shield / CAN GND ⑯ Reserved
Connector type for connecting the data cables to the 3D sensor: ● Insert: Harting Han 16E-F–s
● Housing: Harting Han 16B – gs – M32
This set is supplied as standard with the 3D sensor. Replacements or alternative housings are available from:
HARTING Deutschland GmbH & Co. KG, P.O. Box 2451, D - 32381 Minden, Germany www.harting-connectivity-networks.de/
5.2.2 CAN interface The CAN bus is operated at a transmission speed of 250 kbit / s. According to the relevant standard, this means a maximum permissible cable length of 250 m under ideal environmental conditions (no sources of interference). It is absolutely essential to take this length specification into account when planning an installation, especially where multiple units are to be operated on one interface converter, requiring both outgoing and return cables between the cubicle and the unit.
Use a 9-pin SUB-D socket at the interface end for the CAN connection to the 3D sensor. We recommend the use of screw-type terminal strips between the control cubicle and the 3D sensor.

Electrical installation 5.2 Data interfaces
Truck Positioning System (TPS) Operating Instructions, 08/2012 51
The CAN bus cable must be terminated at both ends with a terminating resistance of 120 ohms between CAN L and CAN H. Provide a terminator resistor on the 3D sensor for this purpose. You can fit this resistor on the Harting connector between pins 9 and 10. A suitable resistor is supplied as standard with the 3D sensor. For the termination at the converter end, we recommend the use of a special CAN SUB-D 9-pin connector with built-in terminator resistor.
Terminal assignment of the CAN interface (sensor controller)
① Reserved ⑥ (CAN GND) ② CAN L ⑦ CAN H ③ CAN GND ⑧ Reserved ④ Reserved ⑨ Reserved ⑤ Shield
This connector is not supplied as standard with the converter.
Recommended connector type for connection to the CAN interface: Phoenix Contact SUBCON-PLUS-CAN/AX
This item is available from:
PHOENIX CONTACT GmbH & Co. KG, Flachsmarktstrasse 8, D-32825 Blomberg, Germany http://www.phoenixcontact.de/ Order No. 2306566
Note
For more information, see the "CANbus Troubleshooting Guide" in the manuals for CAN products provided by esd electronic system design.

Electrical installation 5.2 Data interfaces
Truck Positioning System (TPS) 52 Operating Instructions, 08/2012
5.2.3 RS 422 interface The RS 422 interface is operated at a transmission speed of 500 kbps. Use a 9-pin SUB-D socket at the interface end for the RS422 connection to the 3D sensor. We recommend the use of screw-type terminal strips between the control cubicle and the 3D sensor.
Terminal assignment of the RS422 data cable (sensor controller)
① TxD - ⑥ ② TxD + ⑦ ③ RxD + ⑧ ④ RxD - ⑨ ⑤ Signal GND
This connector is not supplied as standard with the converter. Recommended connector type for connection to the RSR422 interface:
Phoenix Contact SUBCON 9/F-SH
This item is available from:
PHOENIX CONTACT GmbH & Co. KG, Flachsmarktstrasse 8, D-32825 Blomberg, Germany http://www.phoenixcontact.de/
Order no. 2761499

Electrical installation 5.2 Data interfaces
Truck Positioning System (TPS) Operating Instructions, 08/2012 53
5.2.4 Summary of data cables
Figure 5-3 Data cables between the sensor controller and the 3D sensor
CAN fieldbus The CAN bus must equipped at both ends, that is, on the 3D sensor and on the sensor controller, with an input impedance of 120 Ω.
Input impedance on the sensor controller
An input impedance must be activated on the CAN bus card (or on a corresponding adapter).
● Make sure that an adequate input impedance of 120 Ω is activated on the CAN interface of the sensor controller.
Input impedance on the 3D sensor
Each 3D sensor is supplied with a suitable terminating resistor. You will find it in a small bag on the motor.
● Install this terminating resistor between terminal 9 and terminal 10 in connector X41.

Electrical installation 5.2 Data interfaces
Truck Positioning System (TPS) 54 Operating Instructions, 08/2012
Serial data cable (COM interface)
Pin assignment USB - RS422 (previous version SIMOCRANE TPS)
Please observe that the pin assignment of the USB RS422 interface of the company W&T (was included in the scope of SIMOCRANE TPS V1.0 SP1) is incompatible with the integrated RS422 interface in the sensor controller.
If you configured the pin assignment on the basis of the old W&T RS422 interface, you must adapt it to the new interface. The figure offers a solution to the problem:
Figure 5-4 Adapting the pin assignment
Grounding Both data cables must be grounded.
● Ground each of the data cables at one place only, preferably on the sensor controller end. This will prevent grounding loops.

Truck Positioning System (TPS) Operating Instructions, 08/2012 55
Operator interface (HMI) 6
The data required for the TPS system are entered via an operator interface. This data is entered by the crane driver or checker in most cases. However, in installations where the crane controller is networked, the data could also be transferred from a central location in the port. The only operator action therefore required directly on the crane is selection of the TPS operating mode.
Note
The operator interface to the user, hereinafter called the Truck Positioning HMI (human-machine interface), is not part of the TPS.
If the Truck Positioning System is to be operated in conjunction with the sway control system from the SIMOCRANE product range, the operator control and monitoring system (based on the SIMATIC Multi Panel 370 series) available as an option for the sway control system could also be used as the Truck Positioning HMI. The panel provides all the required data entry and display features.
In all other cases, the Truck Positioning HMI can be individually planned and designed by the user.
This chapter will describe the option of using the operator control and monitoring panel of the sway control system as a Truck Positioning HMI. It will also specify the minimum requirements of the Truck Positioning HMI with respect to the data to be transferred and present possible solutions.
6.1 Requirements of the Truck Positioning HMI
6.1.1 Data to be supplied by the Truck Positioning HMI The Truck Positioning System basically requires all the data input into the interface described in the chapter titled Interface to the crane controller (Page 87). The type and scope of data to be entered in the Truck Positioning HMI by the user depends primarily on the degree to which the cargo handling facility is automated and on the structure of the user program in the crane controller. Much of the data used can be preprocessed from crane data and made available by the crane controller itself. However, the Truck Positioning System also requires additional data which need to be input via the Truck Positioning HMI.

Operator interface (HMI) 6.2 The Truck Positioning HMI in SIMOCRANE CMS
Truck Positioning System (TPS) 56 Operating Instructions, 08/2012
The HMI must provide the following input options:
● TPS operating mode
● Direction of travel of trucks
● Lane
● Resetting faults and alarms
In the simplest case, the HMI can consist of switches and indicator lights, which are evaluated and/or driven by the crane controller. A more complex solution would be the touch panel, which, when appropriately configured, can also serve as an operator control and monitoring device for other crane functions.
6.1.2 Link to the Truck Positioning System The crane controller is the only communication partner of the Truck Positioning System, i.e. the Truck Positioning HMI must pass data to the Truck Positioning System through the crane controller. How this data exchange is implemented depends on the type of HMI system (switches, touch panel) and on the topology of the crane network. The best solution for the switches / indicator lights variant would be digital input and output modules with appropriate user program on the controller. Touch panels can be integrated via PROFIBUS or Industrial Ethernet in most cases.
6.2 The Truck Positioning HMI in SIMOCRANE CMS The operator control and monitoring system of SIMOCRANE CMS offers an extensive range of options for visualizing and controlling the functions of SIMOCRANE products. The system is operated via a SIMATIC series panel. These panels feature a touch screen which can detect the location of touches within the display area. It therefore functions as an input device. The operator can activate any function by touching the appropriate icon on the display.
Note
The panel of SIMOCRANE CMS is intended for installation in the crane driver cabine and is connected to the crane controller via the Ethernet. Please refer to the operating instructions of the SIMOCRANE CMS for the full range of functions.
The application CMS Lite is available as an alternative to SIMOCRANE CMS. CMS Lite is a full HMI application for use with WinCC flexible. It was developed for a typical ship-to-shore crane application but without the full range of functions of SIMOCRANE CMS. You can adapt this application to other crane types using simple means.
You can download CMS Lite here: https://support.automation.siemens.com

Operator interface (HMI) 6.3 Operating modes
Truck Positioning System (TPS) Operating Instructions, 08/2012 57
6.3 Operating modes When the 24 V power supply is switched on, the 3D laser system powers up automatically. If no operation mode is selected, the system waits until a mode is set.
The 3D laser system can be set to various modes via the sensor mode control word. The system indicates the current operating mode via a status word. Applications must be used to configure how the modes are monitored.
The operating modes are:
● System Off
● Calibration
● Truck positioning
● Cold restart
6.3.1 System Off The laser system is switched off. No more positioning operations are to take place. If the mode selected cannot be interpreted by the "System off" function, the 3D sensors swivel back to the home position. No more positioning operations are to take place.

Operator interface (HMI) 6.3 Operating modes
Truck Positioning System (TPS) 58 Operating Instructions, 08/2012
6.3.2 Calibration In "Calibration" mode, the TPS system is calibrated so that vehicles can subsequently be positioned accurately. Each 3D sensor is calibrated individually. The position of each 3D sensor is defined in the TPS coordinate system (X, Y, Z, and angles).
Calibration involves the following main steps:
Figure 6-1 Sequence control in "Calibration" mode

Operator interface (HMI) 6.3 Operating modes
Truck Positioning System (TPS) Operating Instructions, 08/2012 59
6.3.3 Truck positioning A truck can be positioned in "Truck positioning" mode. A positioning action involves the following main steps:
Figure 6-2 Sequence control in "truck positioning" mode

Operator interface (HMI) 6.3 Operating modes
Truck Positioning System (TPS) 60 Operating Instructions, 08/2012
6.3.4 Cold restart The "Cold Restart" mode enables the Truck Positioning System to position a truck located directly underneath the crane after a restart or reset. This is particularly important for trucks with cargo, as the sequence in which they are to be processed is predefined.
In "Cold Restart" mode, the active lane is scanned. The result of this scan is used as the start information for the positioning module.
The following preconditions must be met for a cold restart:
● The truck must be within 3 meters of the target position.
● The truck must not be moving.
● The correct lane and the correct direction must have been set in the system.
Three situations can arise with a cold restart:
● An empty truck is located underneath the crane.
● A truck containing a load is located underneath the crane.
● No truck is located underneath the crane.
The crane controller can set "Cold Restart" mode at any time, e.g. after a change of lane or direction.
The cold restart process is carried out as follows:
1. "Cold Restart" mode is selected.
2. Once the mode has been set, a check is performed to see whether trucks are located within the scan range.
3. If no truck is detected, the system reports "Success". "Truck Positioning" mode can then be selected again. After that, the system waits for a new truck.
Note
Use the crane controller (PLC) to switch from the Cold Restart mode to the Positioning mode; see also the note in The "Control panel" tab (Page 136).

Operator interface (HMI) 6.3 Operating modes
Truck Positioning System (TPS) Operating Instructions, 08/2012 61
4. If a known truck is detected, the system reports "Success".
– If you want to accept the scan data, switch directly to "Truck Positioning" mode, without first selecting "Off" mode. The truck is positioned underneath the crane using the data from "Cold Restart" mode.
– If you do not want to accept the scan data, switch to "Off" mode. The scan data is then deleted.
5. If the system does not detect the object properly, the system reports "Failed". Manual parking is then required. Once this has been done, the next truck can be parked in "Truck Positioning" mode again.

Operator interface (HMI) 6.3 Operating modes
Truck Positioning System (TPS) 62 Operating Instructions, 08/2012
Figure 6-3 Sequence control in "Cold Restart" mode

Truck Positioning System (TPS) Operating Instructions, 08/2012 63
Preparation of the sensor controller 7
The information given in this chapter is based on the assumption that all components of the Truck Positioning System have been electrically and mechanically installed and tested. It is also assumed that English has been set as the system language on the service PC and on the SIMOCRANE sensor controller.
Note
When the system is first started up, all interfaces and the Ethernet link to the crane network must be disconnected before the SIMATIC sensor controller is switched on.
7.1 Restoring the basic setting of the SIMOCRANE sensor controller The SIMOCRANE sensor controller is preconfigured and ready for connection when it is delivered from the factory. If the original configuration settings should be lost for any reason, you must connect the input and output devices (keyboard, mouse, monitor) and any other data carriers required to the sensor controller before you check or enter the settings specified below. If you are using a preconfigured SIMOCRANE sensor controller, you can skip this section and go straight to Chapter Connection with the service PC (Page 65).
The following conditions must be fulfilled before you can continue working with the SIMOCRANE sensor controller:
● A user with password must have been created.
● When the PC boots, the user account for which the TPS software has been / will be installed must be logged on so that the TPS boots automatically.
● The Remote Desktop connection must be activated.
1. If a password-protected user account with administrator rights has not been set up already, you must create one now. This account will be used later for the remote connection to the service PC and for executing the TPS software.
2. To set up the account, you must first open the user management screen by clicking on "Start > Run…" and entering "control userpasswords". Then press <Enter>. Alternatively, you can call the same screen by selecting "Start > Settings > Control Panel" and double clicking on "User accounts".
3. Select the option "Create a new account". In the next dialog window, enter a suitable user name ("CranesAdmin" for example) and click on "Next".
4. Now select account type "Computer administrator" and complete the process by clicking on "Create account".
5. Select the new user you have just created and select option "Create a password".

Preparation of the sensor controller 7.1 Restoring the basic setting of the SIMOCRANE sensor controller
Truck Positioning System (TPS) 64 Operating Instructions, 08/2012
6. Now enter an appropriate password ("CranesAdmin" for example) and confirm by selecting "Create Password".
7. Close the "User Accounts" window.
8. To log on the new account automatically when the PC boots, click on "Start" > "Run…" and enter "control userpasswords2". Confirm the input data by pressing <Enter>. A dialog box displaying all the PC's users is then displayed.
9. Remove the tick in the box next to "Users must enter a user name and password to use this computer."
10. Click on "Apply". The "Automatically Log On" window opens.
11. Enter the appropriate user name with password (e.g. user: CranesAdmin; password: CranesAdmin). This user will now be logged on automatically when the SIMOCRANE sensor controller boots.
12. Confirm with "OK" and close the "User Accounts" window with "OK".
13. To activate the Remote Desktop for commissioning, click on "Start > Run…", enter "sysdm.cpl" and confirm by pressing <Enter>. Alternatively, you can select "Start > Settings > Control Panel" and double click on "System" to display the system properties.
14. On the "Remote" tab, activate option "Allow users to connect remotely to this computer". Click on the button "Select Remote Users…" and enter the relevant user ("CranesAdmin", for example) for remote logon. Confirm with "OK". The user that you have selected should now be displayed in the "Remote Desktop Users" window. Close this window as well as the "System Properties" window by clicking on "OK" in each case:
The PC is now ready for start-up via the Remote Desktop.
Please contact Customer Services if you need to install new software (this does not apply if you are simply loading drivers for the interface converters).
Note
If the user name or password have been changed, steps 8 to 13 will need to be repeated.

Preparation of the sensor controller 7.2 Connection with the service PC
Truck Positioning System (TPS) Operating Instructions, 08/2012 65
Virtual memory settings To avoid Windows virtual memory management generating peak loads, we strongly recommend you fix the size of the virtual memory at 1,024 MB.
1. In the "Start" menu, click on "Control Panel".
2. Select "System".
3. Click "Advanced".
4. Under "Performance", select the "Settings" button.
5. Select "Advanced".
6. Click on "Change" under "Virtual memory".
7. Select "Custom size" and set "Initial size (MB)" to 1,024 and "Maximum size (MB)" to 1,024 too. Confirm with "Set" and then "OK".
8. Restart the PC by selecting "Start" > "Run" > "cmd" > "shutdown-r".
7.2 Connection with the service PC
Note
To commission the system, you will need an additional PC with screen, input devices and Ethernet card. Its operating system must be Microsoft Windows XP Professional. This computer will be referred to below as the service PC.
The service PC is connected to Ethernet port no. 2 on the SIMOCRANE sensor controller by means of a crossover Ethernet cable (we recommend Cat5). The purpose of this cable is to provide a Remote Desktop connection between the service PC and the SIMOCRANE sensor controller for performing commissioning with TPS START.
Note
To set up a successful Remote Desktop connection, the IP addresses of the service PC and the SIMOCRANE sensor controller must belong to the same subnet. For this, the IP address of the service PC should be set, for example, to 192.168.2.10.
To set the IP address of the service PC:
1. Select "Start > Run…", enter "ncpa.cpl", and confirm with <Enter>. Alternatively, you can select "Start’" > "Settings" and then click on the "Network Connections" icon.
2. Right-click the icon to open the connection used and click "Properties" to open the properties dialog box for the network connection.

Preparation of the sensor controller 7.2 Connection with the service PC
Truck Positioning System (TPS) 66 Operating Instructions, 08/2012
3. Now click on item "Internet Protocol (TCP/IP)".
The properties dialog for the TCP/IP item is displayed.
4. Select the option "Use the following IP address:" and enter the appropriate address (for example 192.168.2.10) in the "IP address" box.
5. Confirm your input by clicking on "OK" and then click on "OK" again to confirm the properties dialog box for the network connection.
To start the program for the remote desktop connection:
1. Select "Start" > "Run… ." Enter "mstsc" and confirm with <Enter>. Alternatively, you will also find the program under "Start" > "Programs" > "Accessories" > "Communications." Then select "Remote Desktop Connection".
Figure 7-1 Start screen for the Remote Desktop application

Preparation of the sensor controller 7.2 Connection with the service PC
Truck Positioning System (TPS) Operating Instructions, 08/2012 67
2. Click on "Options >>" to enter further settings:
Figure 7-2 "Options" screen for the Remote Desktop application
Computer 192.168.2.141 User Name CranesAdmin Password CranesAdmin

Preparation of the sensor controller 7.2 Connection with the service PC
Truck Positioning System (TPS) 68 Operating Instructions, 08/2012
3. On the "Local Resources" tab, you can enable the data carriers of the service PC which are connected as network drives on the remote PC. This is useful for the purpose of backing up user-specific data to external carriers:
Figure 7-3 Enable local resources for the remote PC
4. Finally, under Section "Experience", set the connecting speed to "LAN (10 Mbps or higher)."
This will give you an optimum representation of the remote environment.

Preparation of the sensor controller 7.2 Connection with the service PC
Truck Positioning System (TPS) Operating Instructions, 08/2012 69
Figure 7-4 Setting the connection speed for the remote connection
Note
With a Remote Desktop connection, only activate the settings that are immediately required (modem settings; enable as few devices as possible), otherwise the performance of the sensor controller will be impaired.

Preparation of the sensor controller 7.2 Connection with the service PC
Truck Positioning System (TPS) 70 Operating Instructions, 08/2012

Truck Positioning System (TPS) Operating Instructions, 08/2012 71
Coordinates, dimensions, parameters 88.1 The coordinate systems
8.1.1 The TPS coordinate system
Figure 8-1 TPS coordinate system, origin on the x-y plane (top view)

Coordinates, dimensions, parameters 8.1 The coordinate systems
Truck Positioning System (TPS) 72 Operating Instructions, 08/2012
TPS has its own coordinate system, which we will call the TPS coordinate system. All positional data refers to this TPS coordinate system, unless otherwise stated. The positional information is passed to the TPS as parameter values.
Note
In the parameter list of TPS START, enter the distance information in centimeters and the angles in degrees.
The TPS coordinate system is a Cartesian system with three dimensions (x, y, z). It is a right-handed coordinated system that is rotated by 180° around the y axis. The y axis runs parallel to the direction of travel of the trolley (y(+): toward the water side), the x-axis runs parallel with the direction of travel of the crane (x(+): to the left) and the z axis runs perpendicularly from the x-y plane, parallel with the direction of hoist (z(+): upward). The origin of the TPS coordinate system is at the point of intersection between imaginary diagonal lines connecting the four uprights of the crane (x = 0, y = 0) at the height of the lanes (z = 0).

Coordinates, dimensions, parameters 8.1 The coordinate systems
Truck Positioning System (TPS) Operating Instructions, 08/2012 73
8.1.2 The OPC coordinate system for data exchange with the crane controller
Figure 8-2 The OPC coordinate system
Data between the crane controller and TPS START is exchanged via the OPC interface. The OPC interface has a dedicated coordinate system used for data exchange between the crane controller and TPS START. We call this coordinate system the OPC coordinate system in this document.
The following special conditions apply to the OPC coordinate system that distinguish it from the TPS coordinate system:
● The x-axis of the TPS coordinate system corresponds to the gantry axis.
● The y-axis of the TPS coordinate system corresponds to the trolley axis.

Coordinates, dimensions, parameters 8.2 Crane (calibration)
Truck Positioning System (TPS) 74 Operating Instructions, 08/2012
● The hoist coordinates are parallel with the z-axis of the TPS coordinate system. However, the TPS values increase upward, so the hoist axis extends in the opposite direction to the z-axis of the TPC coordinate system.
● The origin Trolley=0 and Hoist =0 can be positioned differently on each system. The position of this origin is therefore acquired during commissioning using offset parameters; see Coordinate conversion between crane controller and TPS (Page 172).
● The data is exchanged via the OPC interface in the "millimeters" unit; length dimensions are input in the "centimeters" unit in TPS START.
8.1.3 Coordinate systems of trucks and container trailers For trucks and container trailers, there are separate coordinate systems based on the TPS coordinate system; see Vehicles (Page 81).
8.2 Crane (calibration) The TPS software checks whether the data scanned by the 3D sensor match the data stored in the parameters (parameter values) for the crane structure and the mounting positions of the 3D sensors (calibration) using reference objects on the crane and the installation location and position of the 3D sensor. The following specifications apply:
● The ground underneath the STS crane must be flat and clear of objects.
● The sill beams (girders parallel to the lanes) have the same design on the landside and on the water side.
● The sill beams are implemented as a flat surface and rectangular.
● The portal beams (cross-beams) are mounted over the sill beams.
● The four crane feet have the same design.
● The crane feet have a rectangular cross-section.
● The 3D sensors are mounted beneath the portal beams.
You will find the permissible size of the crane parts (minimum and maximum value) in the SIMOCRANE TPS Parameter Manual. The dimensions are based on the TPS coordinate system.
The following dimensions are required for the object description:
● Sill beam (longitudinal beam, in the direction of travel of the crane)
● Crane foot (vertical struts of the crane)
● Specifications for mounting the 3D sensors
● Parameters of the crane (calibration)
The values are entered in the parameter list in cm.

Coordinates, dimensions, parameters 8.2 Crane (calibration)
Truck Positioning System (TPS) Operating Instructions, 08/2012 75
Position of the sill beam and the crane feet The following figure shows an assignment of parameters and the relevant dimension of the objects on the crane. The parameters p3500, p3501, p3502, and p3503 contain the dimensions of the two sill beams (e.g. waterside and landside of an STS container crane). The parameters p3504, p3505, p3506, and p3507 define the area on the four crane feet that is visible to the 3D sensors. These parameters describe a notional cuboid around the crane foot.
Table 8- 1 Parameter sill beams
Parameter Function p3500 Outer length of the sill beam over everything (total length of the crane understructure) p3501 Length of the sill beam between the crane feet (distance between the inner edges of the
crane feet) p3502 Height of the lower edge of the sill beam, measured from the ground (origin of the TPS
coordinate system) p3503 Height of the upper edge of the sill beam, measured from the ground (origin of the TPS
coordinate system)
Table 8- 2 Parameter crane feet
Parameter Function p3504 Length of the crane foot (dimension along the x-axis) p3505 Width of the crane foot (dimension along the y-axis)

Coordinates, dimensions, parameters 8.2 Crane (calibration)
Truck Positioning System (TPS) 76 Operating Instructions, 08/2012
Parameter Function p3506 Height of the lower edge of the crane foot, measured from the ground (origin of the TPS
coordinate system) p3507 Height of the upper edge of the crane foot, measured from the ground (origin of the TPS
coordinate system)
Note
Note that the values of parameters p3506 and p3507 must be larger than the value of p3503. This results in independent ranges for calibration.
Note
The measurement tolerance / input precision is ± 5 cm.
Position of the 3D sensors The mounting positions are defined with the parameters p3510[n], p3511[n], p3512[n], p3513[n], and p3560[1].
The following figure shows how the parameters and dimensions on the crane interrelate:

Coordinates, dimensions, parameters 8.2 Crane (calibration)
Truck Positioning System (TPS) Operating Instructions, 08/2012 77
Table 8- 3 Parameters mounting positions 3D sensors
Parameter Function p3510[n] Height of the 3D sensor (support platform) above the ground (origin of the TPS
coordinate system) Note: You can find out the mounting height by measuring on site or by consulting technical drawings of the crane
p3512[n] Distance of the 3D sensor from the waterside sill beam (dimension along the y-axis) p3513[n] Distance of the 3D sensor from the landside sill beam (dimension along the y-axis)
Note
The index "[n]" on the parameters listed here indicates whether it is the 3D sensor ID0 ("[0]") or the 3D sensor ID1 ("[1])."
Mounting options
The types of mounting for a 3D sensor may vary by the following features:
● Installation at the left-hand or right-hand gantry beam (left: negative x direction, p3511[n]=false; right: positive x direction, p3511[n]=true)
● 3D sensor is mounted aligned with "plug connection left" or "plug connection right" (left: negative x direction, p3560[n]=true; right: positive x direction, p3560[n]=false). Note: In the figure, the connector is represented by a curved line on the 3D sensor.
The next figure shows the possible mounting options.

Coordinates, dimensions, parameters 8.3 Lanes
Truck Positioning System (TPS) 78 Operating Instructions, 08/2012
Table 8- 4 Parameters mounting options 3D sensors
Parameter Function p3511[n] Indicates whether the 3D sensor is mounted on the left or right portal beam. p3560[n] Mounting location of the 3D sensor; if the servo setpoint is positive, the 3D sensor will
swivel in the negative direction or vice versa.
8.3 Lanes The TPS can position up to two vehicles on up to ten lanes at the same time. Each 3D sensor is aligned with the lane according to the lane specification (active lane). This requires that the lanes are parameterized in the TPS. The basis for this is the TPS coordinate system.
The following dimensions and data are required.
● Assignment of the lanes (up to 10) to the lane IDs (0-9, starting on the landside) (p3610)
● Number of the first and the last lane (first lane: p3600; last lane: p3601, each in the direction y(+))
● Specification of the position of the lanes in the direction of y(+) (starting point: p3620; end point: p3621)
Note
The lane numbers must be consecutively ascending or descending.

Coordinates, dimensions, parameters 8.3 Lanes
Truck Positioning System (TPS) Operating Instructions, 08/2012 79
Table 8- 5 Parameters lanes
Parameter Function p3600 Lowest lane number p3601 Highest lane number p3602 Trolley position (y) with the lowest lane number (spreader is in the center of the lane);
see Coordinate conversion between crane controller and TPS (Page 172) p3603 Spreader position (z) with the lowest lane number (spreader is in the center of the lane);
see Coordinate conversion between crane controller and TPS (Page 172) p3610[n] Assignment of the lane numbers (1...10) to the lane IDs, starting on the landside;
[n]: ID of the lane p3620[n] Start of the lane width in direction y(+);
[n]: ID of the lane p3621[n] End of the lane width in direction y(+);
[n]: ID of the lane

Coordinates, dimensions, parameters 8.4 Working area of the 3D sensor
Truck Positioning System (TPS) 80 Operating Instructions, 08/2012
8.4 Working area of the 3D sensor With the parameters described here, you define the working area of the 3D sensors.
Figure 8-3 Working area of the 3D sensors
Table 8- 6 Parameter working area of the 3D sensors
Parameter Function p3700[n] Change the ID assignment of the 3D sensors; we recommend keeping the defined
assignment (index [0]: 0; index [1]: 1) [n]: ID of the 3D sensor
p3701[n] Lowest ID of the lanes acquired by the 3D sensor; [n]: ID of the 3D sensor
p3702[n] Highest ID of the lanes acquired by the 3D sensor; [n]: ID of the 3D sensor
p3703[n] ID of the lane below the 3D sensor (e.g. "3.5," if between 3 and 4); [n]: ID of the 3D sensor

Coordinates, dimensions, parameters 8.5 Vehicles
Truck Positioning System (TPS) Operating Instructions, 08/2012 81
8.5 Vehicles The TPS recognizes vehicles by comparing parameterized vehicle models with the data acquired by the 3D sensor.
The TPS is designed for vehicles that are used for transporting containers (e.g. in container ports). TPS distinguishes between two types of vehicles: Trucks and container trailers. These vehicle types must satisfy the following prerequisites:
● Trucks have a king pin.
● Container trailers may not have any so-called "twistlocks" on the contact surface to attach the container on the trailer. Only so-called "cornerless port trailers" can be used for TPS.
The number of vehicle models that TPS can support is limited:
● Number of parameterizable trucks: 5
● Number of parameterizable container trailers: 9
Note
The more models of vehicle types you want to create, the more accurate these vehicle models must be configured so that TPS can recognize the individual vehicles and assign them to the associated vehicle model.
Unparameterized vehicles are not recognized by the system and are therefore not correctly positioned.
Vehicle coordinate systems For the purpose of identifying parameters, the two types of vehicle are each defined in a separate three-dimensional Cartesian coordinate system. Both coordinate systems have the same orientation, but differ in the position of their origin.
Orientation of coordinate systems:
x axis: The x axis corresponds to the longitudinal axis of the vehicle. The direction of
travel is the positive direction. All length data for vehicles is specified in x coordinates (cm).
y axis: The y axis corresponds to the transverse axis of the vehicle and is at right angles to the x axis. As seen from the travel direction, the positive direction is left. The x-y plane spanned by the x and y axes is parallel to the x-y plane of the TPS coordinate system.
z axis: The z axis is at right angles to the x-y plane. The positive direction is upward. All height data is specified in z coordinates (cm).

Coordinates, dimensions, parameters 8.5 Vehicles
Truck Positioning System (TPS) 82 Operating Instructions, 08/2012
Origins of the coordinate systems:
Coordinate sytem of the truck:
The origin of the coordinate system of the truck is on the rear edge of the vehicle roof (x = 0), in the center (y = 0), at ground level (z = 0). The position is easy to identify in Figure 8-4 Diagrammatic representation of truck with coordinate system (Page 83).
Coordinate system of the container trailer:
The origin of the coordinate system of the container trailer is in the locking pin (or king pin) which couples the truck to the trailer (x = 0), in the center of the vehicle (y = 0), at ground level (z = 0). The position is easy to identify in Figure 8-5 Schematic representation of container trailers with coordinate system (Page 84).
Based on these coordinate systems, you can either take measurements on individual vehicle models in order to determine the input data, or evaluate dimension drawings of the vehicles in question and convert the relevant dimensions into coordinates. Determine the data for all trucks and for all container trailers to be supported by TPS. The methods by which parameter settings are determined and where they need to be entered in the parameter list are described below.
8.5.1 Trucks The model of the truck is described by parameters p3100[n] to p3107[n]. The values to be entered in these parameters are determined by measurements or are taken from the design drawings. The coordinate system of the truck applies.
The following dimensions and other data are required:
● Enable
● Name
● Cab front end (x position)
● Cab rear end (x position)
● Position of the king pin (locking pin; x position)
● Cab width (direction y(-))
● Cab width (direction y(+))
● Cab height (direction z(+))

Coordinates, dimensions, parameters 8.5 Vehicles
Truck Positioning System (TPS) Operating Instructions, 08/2012 83
Figure 8-4 Diagrammatic representation of truck with coordinate system
Table 8- 7 Parameter truck model
Parameter Function p3100[n] Release of truck model p3101[n] Name of truck model p3102[n] Length of the cab roof (dimension along the x-axis) p3103[n] Zero point of the coordinate system of the tractor; this value is always 0 p3104[n] Distance between king pin (coupling between truck and trailer) and rear end of the cab
roof (dimension along the x-axis) p3105[n] Distance left-hand side (positive) of the cab roof
Note: The overall width of the driver's cab is defined by two parameters: p3105[n] and p3106[n].
p3106[n] Distance right-hand side (negative) of the cab roof Note: The overall width of the driver's cab is defined by two parameters: p3105[n] and p3106[n].
p3107[n] Height of the cab roof from the ground to the upper edge of the roof
Note
Index "[n]" indicates the ID number of the parameterized trucks [0...4].

Coordinates, dimensions, parameters 8.5 Vehicles
Truck Positioning System (TPS) 84 Operating Instructions, 08/2012
8.5.2 Container trailer The container trailer is described by parameters p3200[n] to p3299[n]. The container trailer must have a symmetrical structure (axially symmetric around the x-axis).
At least the following dimensions and other data must be parameterized:
● Enable
● Name
● Front (x-position)
● Back (x-position)
● Width of the trailer
● Load floor height
● Side bar, if there is one; up to 8
● Plate, if there is one; up to 8
● Crossbars; at least 2, no more than 30
● Main bar, if there is one; up to 4
Figure 8-5 Schematic representation of container trailers with coordinate system

Coordinates, dimensions, parameters 8.5 Vehicles
Truck Positioning System (TPS) Operating Instructions, 08/2012 85
Table 8- 8 Parameter container trailer model
Parameter Function General p3200[n] Release of model container trailer p3201[n] Name of model container trailer p3202[n] Distance between king pin and front edge of trailer in the positive x-direction p3203[n] Distance from the king pin to the rear edge of the trailer in the negative x-direction p3204[n] Width of the trailer (dimension along the y-axis) p3205[n] Height of the trailer (dimension along the z-axis) Sidebar_0 p3210[n] Front edge of the side supports 0 for the containers p3211[n] Rear edge of the side supports 0 for the containers Plate_0 p3230[n] Front edge of the continuous plate 0 at the height of the load floor p3231[n] Rear edge of the continuous plate 0 at the height of the load floor Mainbar_0 p3250[n] Continuous main bar 0, y-coordinate of the centerline p3251[n] Continuous main bar 0, x-coordinate of the front edge p3252[n] Continuous main bar 0, x-coordinate of the rear edge p3253[n] Width of the sidebar 0 (dimension along the y-axis) p3254[n] Height of the sidebar 0 (dimension along the z-axis) Crossbar_0 p3270[n] x-coordinate of the centerline crossbar 0
Note
Index "[n]" indicates the ID number of the trailer model.
Note
The sidebars are described by two parameters each. A total of eight sidebars can be described (0 to 7).
Only two sidebars are shown in the following figure.
Note
Continuous plates are described by two parameters each. A total of eight plates can be described.
Only two plates are shown in the figure above.

Coordinates, dimensions, parameters 8.6 Container
Truck Positioning System (TPS) 86 Operating Instructions, 08/2012
Note
Main bars are described with five parameters. A total of four main bars can be described (0 to 3).
Only four main bars are shown in the figure above.
Note
Crossbars are described with five parameters each. A total of 30 crossbars can be described (0 to 29).
Only four crossbars are shown in the figure above.
8.6 Container The following ISO containers of TPS are supported by default: 20 feet, 30 feet, 40 feet, 45 feet, 48 feet

Truck Positioning System (TPS) Operating Instructions, 08/2012 87
Interface to the crane controller 9
The sensor controller communicates with the crane controller via an OPC server. A SIMATIC S7, or any other control system which can communicate via OPC, can function as the crane controller. The SIMATIC NET OPC server has been used in the example described here. The byte numbers represent the address in the relevant data block. DB 970 is used as the default. This data block must be created by the user as part of implementation of the user program for supplying data to the crane controller.
9.1 Data assignment with scores7.txt You should use file "scores7.txt" as the basis for data assignment. This is located in C:\Documents and Settings\All Users\Application Data\Siemens\SIMATIC.NET\opc2\binS7
This file defines OPC variable names for data addresses stored in PLC data blocks. One line in the file always describes one variable to be transferred. The syntax for variable definition is as follows: <OPC identifier>=DB<Data block number>,<Data type><Byte address>,<No. of elements>
Example: Lane_Number=DB970,DWORD0,1
The OPC variable "Lane_Number" is stored in data block DB970 in the controller. It is a DWORD (double word) located at address 0 in the data block and consists of one element of the specified data type (as no arrays are transferred for the Truck Positioning System, the number of elements is always 1).
If you decide to select a different data structure in your crane controller, you must adapt the file accordingly.
The byte numbering in the description below is based on the numbering used in the shipped "scores7.txt" file.
Note
If your crane controller has a data block range of under 1,024, you must adapt the "scores7.txt" file accordingly. The names of the OPC variables must not be changed. If the names of OPC variables are missing or incorrect, this can prevent communication between the crane controller and the sensor controller. The system reports an OPC communications error.

Interface to the crane controller 9.2 Configuring the SIMATIC NET OPC server
Truck Positioning System (TPS) 88 Operating Instructions, 08/2012
9.2 Configuring the SIMATIC NET OPC server Data is exchanged between the sensor controller and the crane controller via OPC, an established standard in the automation industry. The sensor controller is preconfigured to be linked via Ethernet to a SIMATIC S7-xxx station with IP address 192.168.1.11 and slot 4 for the SIMATIC CPU. If your configuration settings are the same as those specified above, you do not need to adapt the communication settings for the sensor controller.
In most cases, however, installations are configured in a different way or in compliance with requirements defined by the customer's local IT service team. If this applies in your case, you must work through the procedure described below or check and adapt the settings of the shipped configuration.
Under "D:\LaserTech\…" on the sensor controller you will find two project directories, one for Ethernet and the other for PROFIBUS. If you open the SIMATIC NCM PC Manager, it will generally open the Ethernet project per default. If this is not the case or if you wish to select PROFIBUS, then open the appropriate project.
9.2.1 Adapting the hardware configuration – Ethernet In this first step, you will check and/or adapt a hardware configuration using the SIMATIC NCM PC Manager. To do this, open the configuration of the "SIMATIC PC Station". The following objects are available:
● OPC Server
● IE General
Figure 9-1 Hardware configuration Ethernet
The sensor controller is set to default addresses. The interface "Ethernet 1" is provided for connection to the cargo handling system network and is set per default to IP address 192.168.1.140. If you wish to adjust this address here, you should change the relevant network connection on the Windows Control Panel and make sure that it matches the "Ethernet 1" interface on the sensor controller.

Interface to the crane controller 9.2 Configuring the SIMATIC NET OPC server
Truck Positioning System (TPS) Operating Instructions, 08/2012 89
Figure 9-2 Parameters for IE General
9.2.2 Adapting the hardware configuration – PROFIBUS Start the NCM PC Manager. The relevant project should be loaded automatically when you do this. The project contains the following objects:
● OPC Server
● CP 5611
Figure 9-3 Hardware configuration PROFIBUS, part 1

Interface to the crane controller 9.2 Configuring the SIMATIC NET OPC server
Truck Positioning System (TPS) 90 Operating Instructions, 08/2012
The sensor controller is set to default addresses. The "Fieldbus" interface is provided for connection to the PROFIBUS system of the cargo handling facility and is set to IP PROFIBUS address 2 per default. If you wish to adjust this address here, you should change the PG/PC interface on the Windows Control Panel and make sure that it matches the "Fieldbus" interface on the sensor controller.
Figure 9-4 Hardware configuration PROFIBUS, part 2
Figure 9-5 Properties of the PROFIBUS interface

Interface to the crane controller 9.2 Configuring the SIMATIC NET OPC server
Truck Positioning System (TPS) Operating Instructions, 08/2012 91
9.2.3 Configuring the network – Ethernet ● Starting from the hardware configuration, begin configuring the network with NetPro.
Figure 9-6 NetPro

Interface to the crane controller 9.2 Configuring the SIMATIC NET OPC server
Truck Positioning System (TPS) 92 Operating Instructions, 08/2012
● Select the OPC server in the PC object in the top half of the screen. The list of connections in the lower half of the screen displays item "S7 Connection_1".
Figure 9-7 Properties of an S7 connection
● Check the settings of the connection partner. This is the IP address of the SIMATIC S7 controller.
Note
Connection name "S7 Connection_1" must be entered correctly, as the OPC connection data copied during software installation is coordinated with it.

Interface to the crane controller 9.2 Configuring the SIMATIC NET OPC server
Truck Positioning System (TPS) Operating Instructions, 08/2012 93
● Then click on button "Address Details…" to call the next dialog.
Figure 9-8 Properties of an S7 address setting
● Accept the rack number and slot of the CPU you want to address from the HW Config of your S7 program.

Interface to the crane controller 9.2 Configuring the SIMATIC NET OPC server
Truck Positioning System (TPS) 94 Operating Instructions, 08/2012
9.2.4 Configuring the component configurator In order to establish the OPC connection, you must transfer configuration data to the component configurator. Launch the component configurator application by double clicking on the bottom right in the taskbar.
Figure 9-9 Component configurator
You will find the Ethernet connection listed here per default. If you have changed a component, you must load the component or the station to which it belongs again. Use the "Import Station..." command to do this.
Note
If the configuration is not shown following a PC restart, load the corresponding ".XDB" file again.

Interface to the crane controller 9.2 Configuring the SIMATIC NET OPC server
Truck Positioning System (TPS) Operating Instructions, 08/2012 95
Figure 9-10 Loading a station
● Locate the relevant file in the associated project on drive "D": You will find it in subdirectory "XDBs".
● Import the file and terminate the load operation.
● If error messages are displayed, restart the PC and check the component configurator once more.
9.2.5 Checking the connection When you are certain that the link physically exists and you have entered the parameter settings, you should check the connection.
1. To do this, first start OPC SCOUT.

Interface to the crane controller 9.2 Configuring the SIMATIC NET OPC server
Truck Positioning System (TPS) 96 Operating Instructions, 08/2012
2. Load the appropriate configuration file from drive D: by selecting "File > Open…".
Figure 9-11 Loading OPC SCOUT
The program will then display a connection group "Cranes" plus the programmed OPC variables and their status. When a connection has been established successfully, the "Quality" column should display "good" for all variables.

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) Operating Instructions, 08/2012 97
Figure 9-12 Variable status
9.3 Input data TPS This chapter describes the data that are transferred from the crane controller (PLC) via OPC server to the TPS Runtime. In our presentation, we use a SIMATIC S7 as the crane controller.
The data are presented here to correspond to the method by which they are actually stored in the memory of a SIMATIC S7 control system. A SIMATIC S7 control stores data in a big-endian architecture, i.e. the most significant byte in a word or double word is stored at the lowest address and the next byte value in significance is stored at the following memory location and so on. It is essential to take this sorting method into account when data in the user program are accessed bit-serially.
Note
Ensure that the variable names are written accurately. If the variables names are not recognized, this will lead to malfunctions.

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) 98 Operating Instructions, 08/2012
Table 9- 1 Data from the controller (PLC) to the TPS Runtime
Interface laser scanners Data to sensor Description (1)
Type OPC Variable name as declared in Scores7.txt file
See section ...
Lane number DWORD Lane_Number Lane Number Words (Page 99)
Sensor Modus 1 WORD Sensor_Modus_1 Sensor Modus 2 (At Present not available)
WORD Sensor_Modus_2 Sensor Modus words (Page 100)
Crane status word 1 WORD Crane_STW_1 Crane status word 2 WORD Crane_STW_2 Crane status word 3 WORD Crane_STW_3
Crane Status words (Page 102)
Crane handshake WORD Crane_Handshake Crane handshake (Page 103) Actual Hoist position REAL Actual_Hoist_Position Actual Hoist Position
(Page 104) Actual Trolley position REAL Actual_Trolley_Position Actual Trolley Position
(Page 104) Actual Gantry position REAL Actual_Gantry_Position Actual Gantry Position
(Page 104) Actual Slew position REAL Actual_Slew_Position Actual Slew position
(Page 104) Spreader status word 1 general
WORD Spreader_STW_1_General General spreader status words (Page 105)
Status word 1 spreader landside
WORD Spreader_STW_1_LS Spreader Status Landside words (Page 106)
Status word 1 spreader waterside
WORD Spreader_STW_1_WS Spreader Status Waterside words (Page 107)

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) Operating Instructions, 08/2012 99
9.3.1 Lane Number Words
Figure 9-13 Bit assignments of the double word "Lane_Number"

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) 100 Operating Instructions, 08/2012
"Lane_Number" is a DWORD variable and occupies bytes 0 to 3 in the data block. "Lane_Number" defines which lane is currently selected. The diagram above shows the bit assignments for lane selections.
Note
Due to differences in the data management method used by PC systems and the SIMATIC S7, the bit number in the S7 does not match the lane number. It is essential to note the assignments in the above table when the data are subsequently processed.
This selection focuses the 3D sensors onto the relevant lane. The number of lanes which may be selected depends on the operating mode:
Single spreader → max. 1 lane Tandem spreader → max. 2 lanes (adjacent)
9.3.2 Sensor Modus words
Figure 9-14 Bit assignments of the word "Sensor_Modus_1"

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) Operating Instructions, 08/2012 101
Figure 9-15 Bit assignments of the word "Sensor_Modus_2"
The two words "Sensor_Modus_1" and "Sensor_Modus_2" define the mode of operation currently selected for the laser system. One of four different modes can be selected for the system:
laser system off The laser system is switched off; no truck positioning functions are
required. calibration The Truck Positioning System needs to be calibrated so that it can
accurately position vehicles. truck positioning A truck needs to be positioned. cold restart One or two lanes are checked for containers or trucks. The result
can be used for "Positioning" mode. TPS Runtime restart TPS Runtime is to be restarted on the sensor controller.
Note
Note that, if the calibration run is activated, the results of the previous calibration run will be overwritten. Therefore back up the current parameters with TPS START for each calibration run.

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) 102 Operating Instructions, 08/2012
9.3.3 Crane Status words
Figure 9-16 Bit assignments of the word "Crane_STW_1"
Figure 9-17 Bit assignments of the word "Crane_STW_2"

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) Operating Instructions, 08/2012 103
Figure 9-18 Bit assignments of the word "Crane_STW_3"
These three words can transfer crane status information required by the Truck Positioning System:
Crane on/off The crane is switched on or off. Reset Fault Active faults in the Truck Positioning System must be reset. Hoisting The spreader is being hoisted. Lowering The spreader is being lowered. Trolley forwards (WS) The trolley is moving in the direction of the water. Trolley backwards (LS) The trolley is moving in the direction of the land (quay). Gantry left The crane is moving (from viewpoint of crane driver) to the left. Gantry right The crane is moving (from viewpoint of crane driver) to the right. Vehicle entry left side Vehicles are entering (from viewpoint of crane driver) from the left. Vehicle entry left side Vehicles are entering (from viewpoint of crane driver) from the right.
9.3.4 Crane handshake "Crane_Handshake" is a WORD variable and should begin at address 14 in the data block. It is an element of a connection monitoring mechanism in the crane controller, which you must implement in the user program. The operating principle of the connection monitoring mechanism is as follows:
A WORD value is generated (by a counter, for example) in the crane controller and stored in variable "Crane_Handshake".
The Truck Positioning software reads this value in and stores it in variable "TPS_Handshake". The laser application sends an echo of "Crane_Handshake" back to the PLC.

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) 104 Operating Instructions, 08/2012
After a specific time period (defined, for example, by a timer in the controller time constant >> maximum latency of connection), the controller can compare the values in variables "Crane_Handshake" and "TPS_Handshake". If the values are identical, the communication link works and the next value can be written to variable "Crane_Handshake". If the values are different, an error has occurred to which the controller can react (message on the operator interface, special switching sequence on the signaling system or similar).
See Troubleshooting / FAQs (Page 187)
9.3.5 Actual Hoist Position "Actual_Hoist_Position" is a REAL variable and should begin at address 16 in the data block. It specifies the current hoist position in [mm] referred to the crane coordinate system.
9.3.6 Actual Trolley Position "Actual_Trolley_Position" is a REAL variable and should begin at address 20 in the data block. It specifies the current trolley position in [mm] referred to the crane coordinate system.
9.3.7 Actual Gantry Position "Actual_Gantry_Position" is a REAL variable and should begin at address 24 in the data block. It specifies the current gantry position in [mm] referred to the crane coordinate system.
9.3.8 Actual Slew position "Actual_Slew_Position" is a REAL variable and should be located in address 28. It specifies the angle of slewing gear on cranes with slewing gear. This variable is not used for ship-to-shore cranes and not evaluated in the current version of the Truck Positioning System software; however, the OPC server still expects to receive it.

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) Operating Instructions, 08/2012 105
9.3.9 General spreader status words
Figure 9-19 Bit assignments of the word "Spreader_STW_1_General"
The general spreader status words provide information about the active spreader or spreaders:
Spreader selection landside The spreader on the land side is active. Spreader selection waterside The spreader on the water side is active. Spreader selection landside + waterside (double spreader) The spreaders on both the land and water
sides are active (double spreader). Spreader landed The active spreaders have landed on the
containers.

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) 106 Operating Instructions, 08/2012
9.3.10 Spreader Status Landside words
Figure 9-20 Bit assignments of the word "Spreader_STW_1_LS"
The two status words for the spreader on the land side provide information about the spreader's operation mode. The following status information can be transferred:
Spreader operation The spreader is active. Long-twin operation The spreader is set to twin operation with two
containers. Spreader size landside 20 feet The spreader is set to a 20-foot container size.Spreader size landside 30 feet The spreader is set to a 30-foot container size.Spreader size landside 40 feet The spreader is set to a 40-foot container size.Spreader size landside 45 feet The spreader is set to a 45-foot container size.Spreader locked The spreader twistlocks are attached at all four
corners of the container(s). Spreader unlocked The spreader twistlocks are not attached at all
four corners of the container(s). Spreader landed The spreader has landed on the corners of the
container(s).

Interface to the crane controller 9.3 Input data TPS
Truck Positioning System (TPS) Operating Instructions, 08/2012 107
9.3.11 Spreader Status Waterside words
Figure 9-21 Bit assignments of the word "Spreader_STW_1_WS"
The bit assignments of the two status words for the water-side spreader are identical to those of the status words for the land-side spreader.

Interface to the crane controller 9.4 Output data TPS
Truck Positioning System (TPS) 108 Operating Instructions, 08/2012
9.4 Output data TPS This chapter describes the data which the laser application transmits via OPC server to the crane controller for further processing. The following table provides an overview of the data received by the PLC:
Table 9- 2 Data from the laser controller to the crane controller
Interface laser scanners Data from sensor Description (1)
Type OPC variable name See section ...
Sensor 1 status word WORD Sensor_1_STW Sensor Status word (Page 109) Servo 1 status word WORD Servo_1_STW Servo Status word (Page 110) Sensor 2 status word WORD Sensor_2_STW Sensor Status word (Page 109) Servo 2 status word WORD Servo_2_STW Servo Status word (Page 110) Sensor Modus Status word 1 WORD Sensor_Modus_1_STW Sensor Modus Status word 2 WORD Sensor_Modus_2_STW
Sensor mode status word (Page 112)
TPS Status word WORD TPS_STW_1 Truck Positioning System status word (Page 113)
TPS Handshake WORD TPS_Handshake Truck Positioning System Handshake (Page 114)
Calibration Status Word WORD Calib_STW Calibration status word (Page 114) Lane status word landside WORD STW_Lane_Landside Lane status words (Page 115) Landside Vehicle Type WORD TPS_LS.Vehicle_Type Landside / Waterside Vehicle Type
(Page 116) Landside actual Position REAL TPS_LS.Actual_position Landside/waterside actual position
(Page 116) Landside Status Cold Restart Modus
WORD Cold_Restart_LS_STW Landside/waterside status cold restart (Page 116)
Lane status word waterside WORD STW_Lane_Waterside Lane status words (Page 115) Waterside vehicle type WORD TPS_WS.Vehicle_Type Landside / Waterside Vehicle Type
(Page 116) Waterside actual position REAL TPS_WS.Actual_position Landside/waterside actual position
(Page 116) Waterside Status Cold Restart Modus
WORD Cold_Restart_WS_STW Landside/waterside status cold restart (Page 116)

Interface to the crane controller 9.4 Output data TPS
Truck Positioning System (TPS) Operating Instructions, 08/2012 109
9.4.1 Sensor Status word
Figure 9-22 Bit assignments of the word "Sensor_x_STW"
X = Sensor number 1 to 6 Y = Byte number in the data block Sensor 1 → Y = 100 Sensor 2 → Y = 106 Sensor 3 → Y = 112 Sensor 4 → Y = 118 Sensor 5 → Y = 124 Sensor 6 → Y = 130
The sensor status words provide status information about individual lasers:
Communication error (RS422-interface) The laser scanner cannot be accessed by the RS
422-USB interface converter. Interface error The RS 422-USB interface converter cannot be
accessed. Parameterization error The laser is incorrectly parameterized. Laser scanner polluted error The laser is so heavily polluted that it is
malfunctioning or has failed altogether. The system has stopped as a result. The laser should be cleaned.
System error A sensor system error has occurred and caused the system to stop.
Laser scanner polluted warning The laser scanner is heavily polluted and should be cleaned.
System error warning A sensor system error of a type which does not cause system shutdown has occurred.

Interface to the crane controller 9.4 Output data TPS
Truck Positioning System (TPS) 110 Operating Instructions, 08/2012
9.4.2 Servo Status word
Figure 9-23 Bit assignments of the word "Servo_x_STW"
X = Sensor number 1 to 6 Y = Byte number in the data block Sensor 1 → Y = 102 Sensor 2 → Y = 108 Sensor 3 → Y = 114 Sensor 4 → Y = 120 Sensor 5 → Y = 126 Sensor 6 → Y = 132
The servo status words provide status information about individual servo motors:
Communication error (CAN-bus) The relevant servo motor cannot be accessed by the
CAN USB interface converter. Interface error The CAN USB interface converter cannot be
accessed. Parameterization error The servo motor is incorrectly parameterized.

Interface to the crane controller 9.4 Output data TPS
Truck Positioning System (TPS) Operating Instructions, 08/2012 111
Power supply error A fault in the motor power supply has caused the system to stop. Possible cause of error:
POW VOL FET WDG SHO INT LVO
Power error Power voltage error Power Fet temperature error Motor winding overtemperature - SHO Short-circuit error Integral error (I2T) Logic voltage error
You will find a detailed description of these errors in the following chapter: See Troubleshooting / FAQs (Page 187)
Temperature error The motor temperature is outside tolerance; this fault has caused the system to stop.
System error A servo system error has caused the system to stop. Possible cause of error:
TOW COM HLT CPU HAR SOF
Motor following error Watchdog error Emergency stop active CPU overloaded STOP cam error Software limit switch error
You will find a detailed description of these errors in the following chapter: See Troubleshooting / FAQs (Page 187)
Communication warning The communication link to the motor is malfunctioning.

Interface to the crane controller 9.4 Output data TPS
Truck Positioning System (TPS) 112 Operating Instructions, 08/2012
9.4.3 Sensor mode status word The status of the sensor system is indicated in two status words.
Figure 9-24 Bit assignments of the word "Sensor_Modus_1_STW"
laser system off No mode is selected.
The system is inactive. laser system calibration The system is in "Calibration" mode and should
be calibrated so that it can subsequently perform accurate positioning movements.
laser system truck positioning The system is in "Positioning" mode. A truck needs to be positioned.
laser system in cold restart modus The system is in "Cold Restart" mode. A 3D scan is created of the current situation underneath the crane. This data can be transferred in "truck positioning" mode.
Received data status TPS Runtime restart TPS Runtime will be started again soon. The parameters are read in again and initialization of the connected 3D sensors is performed.

Interface to the crane controller 9.4 Output data TPS
Truck Positioning System (TPS) Operating Instructions, 08/2012 113
Figure 9-25 Bit assignments of the word "Sensor_Modus_2_STW"
9.4.4 Truck Positioning System status word
Figure 9-26 Bit assignments of the word "TPS_STW_1"
The system status of the Truck Positioning System is defined by one data word. The individual bits of the word contain different items of status information:

Interface to the crane controller 9.4 Output data TPS
Truck Positioning System (TPS) 114 Operating Instructions, 08/2012
System OK The system is ready to operate. System Warning A warning that does not shut down the system has occurred. System Error A system error which causes the system to shut down has occurred.
9.4.5 Truck Positioning System Handshake "TPS_Handshake" is a WORD variable and should be located in address 138. It is an element of the connection monitoring mechanism between the sensor controller and the crane controller. The return value from the Truck Positioning System to the crane controller is stored in this variable. For further information about the operating principle of the connection monitoring mechanism, please refer to the description of variable "Crane_Handshake".
9.4.6 Calibration status word "Calib_STW" (address 264 in the data block) is a WORD variable and contains the status bits for "Calibration" mode.
Figure 9-27 Bit assignments of the word "Calib_STW"

Interface to the crane controller 9.4 Output data TPS
Truck Positioning System (TPS) Operating Instructions, 08/2012 115
9.4.7 Lane status words
Figure 9-28 Bit assignments of the word "STW_Lane_Landside"
Figure 9-29 Bit assignments of the word "STW_Lane_Waterside"
The status of the lanes is defined by one data word per lane. The individual bits of the word contain different items of status information:
TPS Position data valid The data transferred for the "traffic light" control
is valid and can be processed.

Interface to the crane controller 9.4 Output data TPS
Truck Positioning System (TPS) 116 Operating Instructions, 08/2012
9.4.8 Landside / Waterside Vehicle Type "TPS_LS.Vehicle_Type" (address 146 in the data block) and "TPS_WS.Vehicle_Type" (address 202 in the data block) are WORD variables and contain the internal ID assignments of detected vehicles.
9.4.9 Landside/waterside actual position "TPS_LS.Actual_position" (address 148 in the data block) and "TPS_WS.Actual_position" (address 204 in the data block) are REAL variables and contain the distance in [mm] between detected vehicles and the target position.
9.4.10 Landside/waterside status cold restart "Cold_Restart_LS_STW" (address 260 in the data block) and "Cold_Restart_WS_STW" (address 262 in the data block) are WORD variables and contain the status bits for "Cold Restart" mode.
Figure 9-30 Bit assignments of the word "Cold_Restart_LS_STW"

Interface to the crane controller 9.5 Control of the TPS system
Truck Positioning System (TPS) Operating Instructions, 08/2012 117
Figure 9-31 Bit assignments of the word "Cold_Restart_WS_STW"
9.5 Control of the TPS system As described in Section Operating modes (Page 57), the 3D laser system can be set to various modes via the sensor mode control word.
The following modes are supported by SIMOCRANE TPS and must be controlled by applications in the crane control (PLC):
● Calibration
● Truck positioning
● Cold restart
Note
The 3D sensors can move in each mode.
Note
If TPS Runtime is switched to "system off," the 3D sensors move into to the zero position. The 3D sensors are directed vertically downward in the zero position.
Note
If no mode is selected, TPS Runtime enters "system off."
Control of the TPS system in various modes is described below.

Interface to the crane controller 9.5 Control of the TPS system
Truck Positioning System (TPS) 118 Operating Instructions, 08/2012
9.5.1 Mode calibration
Note
The 3D sensors can move in each mode.
Calibration mode is requested via bit 2 "Sensor Modus_1, Send data laser system calibration is active." The following conditions must be fulfilled:
● Bit 2 must be selected exclusively via the OPC interface and no mode must be selected at the same time.
● No error must be pending (no error bits in "Sensor_x_STW," "Servo_x_STW" or "TPS_STW_1")
● At least one lane must be selected via the OPC interface.
● A valid calibration file must be present in TPS Runtime.
On successful switchover, TPS Runtime confirms the mode via the OPC interface with bit 2 "Sensor_Modus_1_STW, Received data status laser system calibration".
During a calibration run, scenes are recorded with all connected 3D sensors. TPS Runtime attempts to recognize the parameterized calibration objects that are required for position determination of the 3D sensor in these scenes, for example:
● Sill beam landside and on the waterside
● Crane feet on the landside and on the waterside
● Floor between the two sill beams
If calibration has been successfully completed, TPS Runtime sends bit 0 "Calib_STW, Received data status calibration finished". TPS Runtime remains in this condition until "Calibration" mode is deselected and switchover is performed to "System Off".
If calibration fails (e.g. not all calibration objects have been found), TPS Runtime sends bit 1 "Calib_STW, Received data status calibration failure".
9.5.2 Positioning mode With Positioning mode, the main function of the TPS is activated.
Positioning mode is requested via bit 2 "Sensor Modus_1, Send data laser system positioning is active." The following conditions must be fulfilled:
● Bit 2 must be selected exclusively via the OPC interface and no mode must be selected at the same time,
● No error must be pending (no error bits in "Sensor_x_STW," "Servo_x_STW" or "TPS_STW_1")
● At least one lane must be selected via the OPC interface.
● A valid calibration file must be present in TPS Runtime.
On successful switchover, TPS Runtime confirms the mode via the OPC interface with bit 2 "Sensor_Modus_1_STW, Received data status laser system positioning"

Interface to the crane controller 9.5 Control of the TPS system
Truck Positioning System (TPS) Operating Instructions, 08/2012 119
The following data is required by TPS Runtime for Positioning mode:
● Current position of the crane hoist, "Actual_Hoist_Position"
● Current position of the trolley traverse mechanism, "Actual_Trolley_Position"
● Current position of the crane travel mechanism, "Actual_Gantry_Position"
● Communication between TPS Runtime and the crane controller must exist (monitored by means of a handshake signal)
● General spreader settings, "Spreader STW_1_General"
● General spreader landside, "Spreader STW_1_LS"
● Settings spreader waterside, "Spreader STW_1_WS"
Note
If only one spreader is required for your application, select the landside spreader. The spreader status is then provided via "Spreader STW_1_LS" at the OPC interface.
TPS Runtime returns with "TPS position data valid" for the landside or waterside lanes whether the received position data is valid.
9.5.2.1 Flowchart for positioning The control flow for positioning is described below. The following main steps are defined in the Positioning mode:
Init positioning
TPS Runtime assigns the associated 3D sensors to the active lanes.
Check lane for truck
TPS Runtime monitors (scans) the active lanes until a known truck enters the lanes.

Interface to the crane controller 9.5 Control of the TPS system
Truck Positioning System (TPS) 120 Operating Instructions, 08/2012
Switch on load type
TPS Runtime analyzes the scan data, takes account of the spreader information and sets the correct use case. There are three use cases:
● Case Empty Truck
Truck with empty container trailer.
● Case Single Container
Truck with loaded container trailer loaded with a 20, 30, 40, or 45-foot container.
● Case Twin Container
Truck with loaded container trailer loaded with two 20-foot containers.
TPS Runtime forwards the detection result via "vehicle type" to the crane controller.
Position
TPS Runtime takes account of the following presettings in target position calculation:
● Spreader size (20, 30, 40, 45, and 2x20 foot)
● Spreader twistlock state, locked or unlocked
● Desired container set-down position on the container trailer defined in parameters p5001 to 5003.
Based on this calculation, the remaining distance is calculated and passed to the crane controller with "TPS_LS.Actual_position" or "TPS_WS.Actual_position".
The positioning control flow depends on the "Load" or "Unload" use case and the spreader setting (single or twin operation). The following positioning control flows are supported by TPS Runtime:
● Position Single Empty
The truck with the empty container trailer is positioned in such a way that the crane can set down a 30, 40, or 2x20-foot container at the front, in the center, or at the rear. A 45-foot container is always set down in the center.
● Position First Space
A truck with an empty container trailer is positioned in such a way that the crane can set down a 20-foot container at the front.
● Position Second Space
A truck with an empty container trailer is positioned in such a way that the crane can set down a 20-foot container at the rear.
● Position Second Space With Container
The truck with a container trailer already loaded at the front is positioned in such a way that the crane can set down a second 20-foot container at the rear.
● Position First Space With Container
The truck with a container trailer already loaded at the rear is positioned in such a way that the crane can set down a second 20-foot container at the front.

Interface to the crane controller 9.5 Control of the TPS system
Truck Positioning System (TPS) Operating Instructions, 08/2012 121
● Position Single Container
The truck with the container trailer already loaded is positioned in such a way that the crane can set down a 30, 40 or 45-foot container.
● Position TwinMode Container
The truck with the loaded container trailer is positioned in such a way that the crane can pick up two 20-foot containers at the same time.
After the positioning operation, TPS Runtime waits until the container is picked up or set down by the crane. There are two control flows for this:
● Handle Truck Unloading Sequence
A container is unloaded from a container trailer.
● Handle Truck Loading Sequence
A container trailer is loaded with a container.

Interface to the crane controller 9.5 Control of the TPS system
Truck Positioning System (TPS) 122 Operating Instructions, 08/2012
The following flowchart shows the two control flows:
Figure 9-32 Flowchart for Handle Truck

Interface to the crane controller 9.5 Control of the TPS system
Truck Positioning System (TPS) Operating Instructions, 08/2012 123
The next figure shows which bits are expected by TPS Runtime in what time and which bits are sent by TPS Runtime to the crane controller as feedback.
Figure 9-33 Controlling positioning mode

Interface to the crane controller 9.5 Control of the TPS system
Truck Positioning System (TPS) 124 Operating Instructions, 08/2012
9.5.3 Cold restart mode Cold restart mode is requested via bit 2 "Sensor Modus_1, Send data laser system cold restart is active". The following conditions must be fulfilled:
● Bit 2 must be selected exclusively via the OPC interface and no mode must be selected at the same time.
● No error must be pending (no error bits in "Sensor_x_STW," "Servo_x_STW" or "TPS_STW_1").
● At least one lane must be selected via the OPC interface.
● A valid calibration file must be present in TPS Runtime.
On successful switchover, TPS Runtime confirms the mode via the OPC interface with bit 2 "Sensor_Modus_1_STW, Received data status laser system Cold restart".
During cold restart, scenes are recorded with all connected 3D sensors. TPS Runtime classifies the parameterized vehicle models from these scenes in the active lanes. This results in three options:
● Classified empty
A truck with an empty container trailer has been classified.
● Classified loaded
A truck with a loaded container trailer has been classified.
● Classified nothing
Neither a truck nor a container trailer was classified. There may be two reasons for this:
– No vehicle in the active lane
– Vehicle is not parameterized in TPS Runtime.
If cold restart has been successfully completed, TPS Runtime sends bit 0 "Cold Restart_.._STW, Received data status cold restart success and finished". TPS Runtime remains in this condition until cold restart mode is deselected and the system is switched directly to positioning mode.
If cold restart fails (e.g. truck still moving), TPS Runtime sends bit 1 "Cold restart_.._STW, Received data status cold restart failure".

Truck Positioning System (TPS) Operating Instructions, 08/2012 125
The TPS START commissioning tool 10
SIMOCRANE TPS START provides the following functions and others:
On-line configuration and parameterization using the parameter list
Use this functional scope to set all parameters in the active version of the parameter list; see also The "Parameter list" tab (Page 130)
Connect TPS Runtime
With this command, you can display and edit the parameter list in TPS START.
Write and restart
Use this command to pass all parameters permanently to TSP Runtime. After the subsequent restart, the modified parameters will be activated.
On-screen display, 3D preparation, and model configuration
Use this function to visualize a 3D preparation and all parameterized models (calibration models for trucks, containers trailers, and containers); see The "3D View" tab (Page 132).
Controlling the system from TPS START Via the Control Panel, you can take over control priority with TPS START from the crane and thus control the system from TPS START; see The "Control panel" tab (Page 136). You require this option during calibration to trigger the scans required for calibration and vehicle recognition.
Diagnosing the system state The various output windows in the detailed display provide you with detailed information about the system state; see The detail display (Page 135).
System requirements Read the readme file in the installation directory of TPS START.

The TPS START commissioning tool 10.1 Overview of the user interface
Truck Positioning System (TPS) 126 Operating Instructions, 08/2012
10.1 Overview of the user interface
① See Chapter Menu Bar (Page 126) ② See Chapter The command bar (Page 127) ③ See Chapter The Navigator (Page 127) ④ See Chapter The working area (Page 128) ⑤ See Chapter The detail display (Page 135) ⑥ See Chapter The Status Bar (Page 140)
10.2 Menu Bar
Figure 10-1 Menu bar
The menu bar gives you access to the menu items.

The TPS START commissioning tool 10.3 The command bar
Truck Positioning System (TPS) Operating Instructions, 08/2012 127
10.3 The command bar
Figure 10-2 Command bar
The command bar contains the two toolbars "SIMOCRANE TPS" and "Help." This enables you to call up frequently used commands directly.
Specifically, you can call up the following commands via the command bar:
● Connect TPS Runtime
● Disconnect TPS Runtime
● Open parameter list
● Save parameter list
● Write and restart
● Help
In the "View" menu, you can define the structure of the command bar.
10.4 The Navigator
Figure 10-3 Navigator
From the Navigator, you can access the most important tabs in a tree structure directly from the working area and from the detail display.

The TPS START commissioning tool 10.5 The working area
Truck Positioning System (TPS) 128 Operating Instructions, 08/2012
10.5 The working area
10.5.1 The "Overview" tab
Global
Figure 10-4 The "Global" tab

The TPS START commissioning tool 10.5 The working area
Truck Positioning System (TPS) Operating Instructions, 08/2012 129
Components
Figure 10-5 The "Components" tab
Note
In this window, faults and warnings are assigned to the relevant TPS components. You will find a chronological list of all faults and warnings on tab The "Faults and alarms" tab (Page 135).

The TPS START commissioning tool 10.5 The working area
Truck Positioning System (TPS) 130 Operating Instructions, 08/2012
Task timing
Figure 10-6 The "Task timing" tab
10.5.2 The "Parameter list" tab
Figure 10-7 "Parameter list" tab
On the "Parameter list" tab, you will find a list of all setting parameters ("p...").

The TPS START commissioning tool 10.5 The working area
Truck Positioning System (TPS) Operating Instructions, 08/2012 131
Various text markups in the parameter list:
Text markup Meaning Orange, italics The value has changed but has not yet been transferred to the master
parameter list with "Write and restart." Green, crossing lines in the "Value" column
No value assigned.
For each parameter, you can display the context-sensitive help using the button next to it.
Different versions of the parameter list
Figure 10-8 Versions of the parameter list
From the above image it is clear that the parameter list in TPS START can only be displayed if there is a link to TPS Runtime (TPS Runtime → Connect TPS Runtime).
Note
Versions of the parameter list held in volatile memory are lost if the 24 V power supply of the sensor controller is switched off.

The TPS START commissioning tool 10.5 The working area
Truck Positioning System (TPS) 132 Operating Instructions, 08/2012
10.5.3 The "3D View" tab The central area in the three tabs "Calibration / Lanes", "Vehicle models" and "Position monitoring" is determined by the 3D view. Operation with this 3D view is identical in any case. Familiarize yourself with the 3D View by trying out the functions of the Motion Z, Rotx, and Roty adjustment wheels. You can additionally display the TPS coordinate system on the "Vehicle models" tab. That way, you will receive direct feedback for your actions.
① Window of the 3D View with overlaid TPS coordinate system ("Vehicle models" tab) ② Resets the 3D View to the initial view. ③ Set the 3D View to show all visible contents of the view. ④ Motion Z adjustment wheel: Moves the view along the z axis; has the same effect as a zoom
function ⑤ Roty adjustment wheel: Allows you to rotate the contents of the display around the y axis ⑥ Rotx adjustment wheel: Allows you to rotate the contents of the display around the x axis
Figure 10-9 Operation of the 3D View; TPS coordinate system is displayed.
The colors on the 3D View:
Table 10- 1 The colors and their meaning
Color Meaning White Results of the full scan or lane scan Green Detected reference objects Red Undetected reference objects (points to incorrect parameters) Yellow Parameters that were used by the TPS during calibration Blue Current parameter values from the editable parameter list Brown and gray
Extra colors for vehicle models

The TPS START commissioning tool 10.5 The working area
Truck Positioning System (TPS) Operating Instructions, 08/2012 133
10.5.3.1 The "Calibration / Lanes" tab
Figure 10-10 "Calibration / Lanes" tab
● With "Save Sensor Data .... ," you can save scan data that you generated in "Full Scan" mode as an xml file.
● If you activate "Calibration settings," the search ranges for calibration will be displayed These search ranges are calculated on the basis of the parameter values in the parameter list (see The "Parameter list" tab (Page 130).
● If you activate "Results of calibration," the data of a calibration process you have triggered ("Get Full Scan data from 3D sensor") will be displayed. In this way, you can check whether the parameter settings and the scan results match.

The TPS START commissioning tool 10.5 The working area
Truck Positioning System (TPS) 134 Operating Instructions, 08/2012
10.5.3.2 The "Vehicle models" tab
Figure 10-11 "Vehicle models" tab
10.5.3.3 The "Position monitoring" tab
Figure 10-12 "Positioning monitoring" tab

The TPS START commissioning tool 10.6 The detail display
Truck Positioning System (TPS) Operating Instructions, 08/2012 135
The data stream of the sensor controller is visualized in this view. This allows you to track the current scan action.
Select the desired 3D sensor from the "Monitor" area. Depending on your choice, the scan data of the respective 3D sensor or both 3D sensors are displayed.
10.6 The detail display
10.6.1 The "Faults and alarms" tab
Figure 10-13 "Faults and alarms" tab
The current list of faults and warnings gives an overview of pending messages. Each message is displayed as a separate message line. The following information is output with each message:
● State
● Number
● Date
● Time
● Duration
● Description
You can limit the list of faults and warnings with the filter. You can either display all messages (that is, faults and warnings), or only faults, or only warnings.
As soon as the cause of the message has been remedied, the entry disappears from the list of pending messages and is moved to the "History" message group.

The TPS START commissioning tool 10.6 The detail display
Truck Positioning System (TPS) 136 Operating Instructions, 08/2012
Use the "Reset faults" button to manually reset faults that are not reset automatically.
Note
The messages listed on this tab are also output on tab Working area → Overview → Components. However, there, the messages are assigned to their respective system components; seeThe "Overview" tab (Page 128).
10.6.2 The "Control panel" tab
Figure 10-14 The "Control panel" tab
With the "Assume control priority" button, you can override the OPC interface and control the system from the control panel.
1. First click the "Assume control priority" button.
The button label changes to "Give up control priority."
2. After that, you can select the operating mode, spreader size, travel direction, and lane.
Note
In "Calibration" and "Full Scan" modes all other selection options in this dialog box are grayed out.
3. You can hand over the selected settings to the system with the "Activate" button. In the "Command value" area, you can see whether your settings have been transferred to the system.
4. When you click the "Give up control priority" button, control priority is returned to the OPC interface or to the crane controller.

The TPS START commissioning tool 10.6 The detail display
Truck Positioning System (TPS) Operating Instructions, 08/2012 137
Note
The return of the control priority to the crane controller should always be done by clicking the "Give up control priority" button from TPS START. The control priority remains with TPS START until it is explicitly returned to the crane controller. This behavior ensures that in the event of a failure of the communication between TPS and the crane controller, the drives of the servo motors do not move.
The control priority also returns to the crane controller at the restart of TPS Runtime.
Selection of the operating mode
You can switch between the following modes:
● Truck Positioning
● Cold Restart
● Calibration
● Lane Scan
● Full Scan
Note
The control panel does not support any processes in which data is transferred from one mode to the next mode. For this reason, the switch from Cold Restart to Positioning using the control panel does not make sense.
Use the crane controller (PLC) to switch from Cold Restart to Positioning.
10.6.3 The "Symbol browser" tab
Figure 10-15 The "Symbol browser" tab

The TPS START commissioning tool 10.6 The detail display
Truck Positioning System (TPS) 138 Operating Instructions, 08/2012
10.6.4 The "Recording" tab
Figure 10-16 "Recording" tab
10.6.5 The "Logging" tab
Figure 10-17 "Logging" tab
Click the "Get current log data" button to display the system data stored in the ring memory.
Click the "Save log database ..." button to save the current log database (data format "*.db") to hard disk.

The TPS START commissioning tool 10.6 The detail display
Truck Positioning System (TPS) Operating Instructions, 08/2012 139
10.6.6 The "Output TPS START" tab
Figure 10-18 "TPS START output" tab
10.6.7 The "Output TPS Runtime" tab
Figure 10-19 "Output TPS Runtime" tab
TPS Runtime runs on the sensor controller and performs the calculations. It is triggered by TPS START. Messages from TPS Runtime, e.g. progress information, appear in this display.

The TPS START commissioning tool 10.7 The Status Bar
Truck Positioning System (TPS) 140 Operating Instructions, 08/2012
10.7 The Status Bar
Figure 10-20 Status bar
The status bar contains several display fields:
Display field "Control priority"
The safety mark is stored when the "Activate" button in the "Control panel" tab is clicked to transfer the settings to the sensor controller.
Display field "System state"
Shows the state of the overall system.
Display field "Operating mode"
Displays the current operating mode.
Display field for "Connection status"
Shows the current connection status ("Connected" or "Disconnected"); directly corresponds to the menu items "Connect TPS Runtime" and "Disconnect TPS Runtime."

Truck Positioning System (TPS) Operating Instructions, 08/2012 141
Commissioning 1111.1 Sample configuration
The following overview graphic shows the example configuration TPS with sensor controller and two 3D sensors:
Figure 11-1 Sample configuration
This example configuration has the following special features:
● Both software components of TPS (TPS START and TPS Runtime) run on the sensor controller.
● The TPS START commissioning tool can be accessed from an external PG/PC via a remote connection to the sensor controller.
● TPS Runtime and TPS START are connected to each other via a local host ("local host.")
● Each 3D sensor is connected via its own CAN interface.
Commissioning of the TPS using this configuration is described as an example on the following pages.
A description of other possible configurations is given in SectionAlternate system configurations (Page 185).
Note
A description of the structure and operation of TPS START is given in The TPS START commissioning tool (Page 125).

Commissioning 11.2 Preconditions
Truck Positioning System (TPS) 142 Operating Instructions, 08/2012
11.2 Preconditions The following requirements must be met for commissioning the SIMOCRANE TPS:
● SIMOCRANE TPS Version 1.1, comprising
– TPS Runtime Version 1.1
– TPS START Version 1.1
● Ethernet connection from PC / PG to interface Ethernet 2 on the sensor controller (default setting IP 192.168.2.141)
Note
Interface Ethernet 2 on the sensor controller is only intended for commissioning and service. Do not use this interface for communication with the crane controller.
● The sensor system must be fully wired (SIMOCRANE sensor controller and 3D sensors; see Electrical installation (Page 43))
● The connected crane controller (PLC) must be OPC operable and supported by SIMATIC NET.
11.3 Checklists The checklists for commissioning must be strictly observed; see Installation checklist for the Truck Positioning System (Page 194).
Note
Please observe the safety information in the manuals for the sensor controller and the 3D sensor (Lase).

Commissioning 11.4 Procedure
Truck Positioning System (TPS) Operating Instructions, 08/2012 143
11.4 Procedure If all basic requirements are met (see Preconditions (Page 142)) commissioning can be performed in the following steps:
1. Start TPS START
2. Online connection to TPS Runtime is established on the sensor controller
3. Parameterize the communication to the crane controller
4. Parameterize / configure the communication to the connected 3D sensors
5. Parameterize / configure the crane elements used for calibration and the mounting positions of the connected 3D sensors
6. Calibrate the connected 3D sensors
7. Parameterize / configure the lanes beneath the STS crane
8. Configure / parameterize the exchanged crane control data
9. Configure the necessary truck and trailer models
10. Configure / parameterize the remaining parameters
11. Start the system
12. Check the correct functioning
13. Back up the set parameters
Note
Note also the forms in the Appendix (STS calibration parameter values form (Page 198) and STS lanes parameter values form (Page 199)). First specify the determined values in these forms so they can be transferred later to the parameter list for TPS START.
11.5 Activate online operation: TPS START via Ethernet
11.5.1 Starting the Program This is how you start TPS START:
1. Establish a remote connection from the external PG/PC (service PC) to the sensor controller; see Connection with the service PC (Page 65)
2. On the sensor controller: Start → Programs → Siemens → SIMOCRANE → TPS → TPS START

Commissioning 11.5 Activate online operation: TPS START via Ethernet
Truck Positioning System (TPS) 144 Operating Instructions, 08/2012
11.5.2 Connection to TPS Runtime Once you have started TPS START on the sensor controller, you must establish the connection to TPS Runtime ("Local host.")
Establishing the online connection via Ethernet TPS Runtime starts automatically when the sensor controller boots. Make sure that TPS Runtime is running on the sensor controller.
To connect TPS START with TPS Runtime:
1. TPS Runtime → Connect TPS Runtime
The "Connect to" window opens.
2. Select "Local host."
3. Click "Connect."
The connection to TPS Runtime on the sensor controller is being established. The connection status is displayed in the status line bottom right.
Figure 11-2 Status display "Connected" in the status line
11.5.3 Ending the connection with TPS Runtime To disconnect the connection between TPS START and TPS Runtime:
● TPS Runtime → Disconnect TPS Runtime
The connection with TPS Runtime is broken. The display in the status line right showing the connection status changes accordingly.
Figure 11-3 Status display "Disconnected" in the status line

Commissioning 11.6 Connection to the crane controller
Truck Positioning System (TPS) Operating Instructions, 08/2012 145
11.6 Connection to the crane controller The TPS is triggered by the crane controller (PLC). An OPC connection is established between the crane controller and the sensor for data exchange.
You must perform the following steps to ensure successful data exchange between the crane controller and the TPS:
● Load the blocks that prepare the memory locations in the crane controller for the exchanged data into the PLC
● Establish a physical TPC/IP connection between the crane controller and the sensor controller
● Configure and parameterize the OPC server to ensure access to the correct memory locations in the crane controller via the OPC variables. See Interface to the crane controller (Page 87).
● Check the exchanged data with OPC SCOUT
● Using TPS START, parameterize the OPC server used by TPS Runtime
● Check the connection status for the crane controller in TPS START
11.6.1 Configuring and parameterizing the OPC server In the factory settings, the sensor controller provides the preconfigured interface Ethernet 1 to establish communication with the crane controller.
● Use interface Ethernet 1 for communication with the OPC server
Note
Set-up of the OPC server is described in ChapterConfiguring the SIMATIC NET OPC server (Page 88).

Commissioning 11.6 Connection to the crane controller
Truck Positioning System (TPS) 146 Operating Instructions, 08/2012
11.6.2 Checking the exchanged data
CAUTION The OPC server has unlimited access to all PLC variables. Incorrect database entries may cause programs to behave in an unexpected way.
As soon as you have set up the OPC server you can use OPC SCOUT.
1. Check the following:
– Is the TPS input data from the crane controller arriving at the OPC server?
– Is the TPS output data being written to the correct PLC variables in the crane controller?
Note
Make sure that TPS Runtime is deactivated during these tests. Otherwise your entries in OPC SCOUT may be overwritten by TPS Runtime.
2. Start OPC SCOUT:
Double-click the relevant program icon on the desktop, or follow: Start → SIMATIC SIMATIC NET → OPC SCOUT
3. First test the TPS input data:
– Set the corresponding PLC variables in the crane controller.
– Check whether this data is being received by the correct OPC variables.
4. To test the TPS output data:
– Set the OPC variables in OPC SCOUT (see Chapter Output data TPS (Page 108).)
– Check whether these values are written to the correct PLC variables in the crane controller.
11.6.3 Parameterization of the OPC server used by TPS Runtime Now parameterize the OPC server that TPS Runtime is supposed to use. These settings are made in the parameter list of TPS START. In the factory settings, the local OPC server on the sensor controller is used.
We recommend maintaining the factory default settings. However, if you have to change these settings for your application, change parameters p253, p254, p255, p256, p257, and p258; see also the Truck Positioning System Parameter Manual.

Commissioning 11.6 Connection to the crane controller
Truck Positioning System (TPS) Operating Instructions, 08/2012 147
11.6.4 Check the connection to the crane controller Check whether the data from the crane controller are being received by TPS Runtime.
● To do this, in TPS START call the Working area → Overview tab.
Section "Communication" contains two entries. These entries display the following:
– Connection to the crane controller via the OPC server
– Data exchange between the crane controller and TPS Runtime (e.g. Heart Beat)
Figure 11-4 Global overview, connection to crane controller
Note
If one of the displays for communication with the host (crane controller) is not green, see No connection to the crane controller (Page 191).

Commissioning 11.7 Commissioning the terminals for communication with the crane controller
Truck Positioning System (TPS) 148 Operating Instructions, 08/2012
11.7 Commissioning the terminals for communication with the crane controller
TPS Runtime controls the following terminals:
● 2D laser scanner
● Servo motor
These devices combined in a single housing form the 3D sensor.
The individual devices are connected via interfaces that are installed on the sensor controller.
These terminals are commissioned in the following steps:
● Parameterize the interface used
● Possibly parameterize the terminal itself
● Define the assignment for the 3D sensor
● Check the assignment for the 3D sensor
Note
Where possible, module IDs, CAN IDs, and communication ports should be changed in the Windows device manager and not in the parameter list. This eases and speeds up transfer of parameter groups to similar or identical cranes.
11.7.1 2D laser scanner In the current version, communication with the 2D laser scanners is always performed via the RS422 interfaces.
11.7.1.1 RS422 interface settings Before you can assign an interface to a 2D laser scanner, you must parameterize it.
When delivered from the factory, the preconfigured serial RS422 interfaces COM3 and COM4 are installed in the sensor controller. You can connect one 2D laser scanner to each of these interfaces. COM3 and COM4 are preset in the factory in TPS Runtime.
If you want to keep these settings, you can skip the next section.
You can change the factory settings with parameters p1208, p1210, p1211, p1212, p1213, and p1214; see also Truck Positioning System Parameter Manual.

Commissioning 11.7 Commissioning the terminals for communication with the crane controller
Truck Positioning System (TPS) Operating Instructions, 08/2012 149
Please remember that you can only activate those COM interfaces that actually exist on the sensor controller with p1208[n]. All parameters p1210[n], p1211[n], p1212[n], p1213[n], and p1214[n] must be assigned for every COM interface activated.
Note
TPS Runtime only supports COM1 to COM6.
11.7.1.2 2D laser scanner settings TPS Runtime supports up to two 3D sensors. Several example configurations are supplied in the delivery version, which activate either only one or both 3D sensors. For the commissioning procedure described here, use the following file: Examples\TPS_V11_Parameter_2_Sensors.xml
To transfer this example configuration to the system:
1. In TPS START: File → Open Parameter List
2. In the file system, select the example file.
3. Finally execute the command TPS Runtime → Write and Restart.
Once you have set the interfaces, you can assign them to a 2D laser scanner. You must assign the COM interface used to every activated 2D laser scanner via parameter p1102[n].
The following assignments apply in the factory settings:
● COM3 to 3D sensor ID0 (p1102[0]: COM3)
● COM4 to 3D sensor ID1 (p1102[1]: COM4)
Note
We recommend using the standard interfaces (COM 3 and COM4) and the standard settings.
If necessary, change the setting of the COM interface in parameter p1102; see also Truck Positioning System Parameter Manual.
Only adapt the firmware version of the 3D sensor (p1148[n]) if the version determined (displayed during power-up of TPS Runtime) deviates from the version set in p1148.
Activate each 2D laser scanner with parameter p1100.
11.7.1.3 Checking the settings Before you can perform any more steps, you must transfer the parameters to TPS Runtime:
1. Select TPS Runtime → Write and Restart.

Commissioning 11.7 Commissioning the terminals for communication with the crane controller
Truck Positioning System (TPS) 150 Operating Instructions, 08/2012
The changes in the parameter list are transferred to TPS Runtime. As a result, TPS Runtime is restarted with the changed values.
Figure 11-5 Components tab, checking the settings
2. In the Components tab, check the following after restarting TPS runtime:
– Did TPS Runtime find and correctly initialize the RS422 interfaces (COM3 and COM4)?
– Were the 2D laser scanners found and correctly found?
Note
If a fault was signaled in the tree representation of the components, see ChapterTroubleshooting / FAQs (Page 187).

Commissioning 11.7 Commissioning the terminals for communication with the crane controller
Truck Positioning System (TPS) Operating Instructions, 08/2012 151
11.7.2 Servo motors TPS Runtime communicates with the servo motors via the CAN-BUS interface on the sensor. Before you can use the servo motors with TPS Runtime, you must make the following settings:
● Set the CAN interfaces
● Assign the ESD-CAN bus channels to the CAN interfaces
● Assign the CAN bus channels to the ESD-CAN bus channels
● Assign the servo motors to the CAN channels
11.7.2.1 Settings for the CAN interfaces As standard, the sensor controller provides two preinstalled CAN interfaces to connect each of the servo motors. Make sure that you use only those CAN interfaces that are assigned to a CAN connection.
Each CAN-BUS device is activated with parameter p1410[n]. If the value is "True," the interface is active; if the value is "False," the interface is inactive.
The interfaces are set as follows on delivery:
● p1410[0]: true
● p1410[1]: true
Note
You can make further settings to the CAN interfaces with parameters p1412 and p1420; see also the Truck Positioning System Parameter Manual.
11.7.2.2 Settings for CAN Channel and ESD CAN Channel A CAN bus can be used by several stations. The parallel data channels that describe the separate data streams between the stations are called channels in TPS Runtime. This relationship is comparable with the several socket connections that coexist on a joint Ethernet bus.
To simplify commissioning, separate channels are used for each servo motor.
The assignment is therefore → CAN Channel → ESD CAN Channel → ESD CAN Device. The following assignments are preset at the factory (p1400, p1480):
● Servomotor 0 → CAN-Channel 0 → ESD-CAN-Channel 0 → ESD-CAN-Device 0
● Servomotor 1 → CAN-Channel 1 → ESD-CAN-Channel 1 → ESD-CAN-Device 1
Do not change these settings.
Note
Please also observe the rules for terminating resistors on CAN buses: see Summary of data cables (Page 53).

Commissioning 11.7 Commissioning the terminals for communication with the crane controller
Truck Positioning System (TPS) 152 Operating Instructions, 08/2012
11.7.2.3 Device settings Use the following parameters to set the drive
● p1330[n] activates the drive.
● p1331[n] assigns the drive to a CAN channel.
● p1332[n] defines the module ID that the drive uses.
● p1333[n] defines the drive type.
In the factory version, both drives are set to p1330[n] = true. "Schunk V53" is set as the type (p1333[n] = SchunkV53).
Note
For servo motor Schunk V53, the module ID is permanently written in the firmware of the drive. The module ID is printed on the housing when it is delivered. If you need to change these settings, use the commissioning software for servo motors of Schunk GmbH (depending on the drive version, this is either Powercube or MCDemo).
Note
For p1333[n], the values "void" and "replay" must not be used by the user; see also TPS Parameter Manual.

Commissioning 11.7 Commissioning the terminals for communication with the crane controller
Truck Positioning System (TPS) Operating Instructions, 08/2012 153
11.7.2.4 Checking the settings Before you can perform any more steps, you must transfer the parameters to TPS Runtime:
1. Select TPS Runtime → Write and Restart.
The changes in the parameter list are transferred to TPS Runtime. As a result, TPS Runtime is restarted with the changed values; see alsoThe "Parameter list" tab (Page 130).
2. In the Components tab, check the following after restarting TPS runtime:
Figure 11-6 Checking the setting of the servo motors
● Did you find all motors?
Note
If a fault was signaled in the tree representation of the components, see ChapterThe "Overview" tab (Page 128).

Commissioning 11.7 Commissioning the terminals for communication with the crane controller
Truck Positioning System (TPS) 154 Operating Instructions, 08/2012
11.7.3 3D sensor 1. Put together one 2D laser scanner and one servo motor to form a 3D sensor.
Parameter p1160 assigns a laser scanner to a servo motor. In the factory settings, p1160[0] = 0 and p1160[1] = 1.
Note
We recommend keeping the default settings in the corresponding parameters. For commissioning purposes and future maintenance you should assign laser scanner ID0 to servo motor ID0 and laser scanner ID1 to servo motor ID1.
2. Connect the laser scanner according to the parameter settings to the COM interfaces of the sensor controller.
11.7.3.1 Checking the assignment of the 2D laser scanner to servo motor The operating modes can only be activated if the connection with the crane controller is functioning. These are required for the plausibility tests of the connected terminals.
Check the assigment between the 2D laser scanner and the servo motor:
1. Deactivate the 2D laser scanner ID1 (p1100[1]: false).
2. TPS Runtime → Write and Restart
3. In the Working area, go to the "3D View → Position monitoring" tab.
4. Go to the "Control panel" tab:
5. Click "Assume Control Priority."
6. Under "Operating Mode:" select the entry "Full Scan."
7. When you click "Activate," a full scan is executed.

Commissioning 11.7 Commissioning the terminals for communication with the crane controller
Truck Positioning System (TPS) Operating Instructions, 08/2012 155
8. Return to the "3D View → Position monitoring" tab.
9. Activate "3D-Sensor ID0."
This should allow you to track the scan action of 3D sensor ID0 in the 3D View.
Figure 11-7 Checking the assignment of the laser scanner
The assignment of the laser scanner ID0 is correct if the image moves in the 3D View. The movement is executed at right-angles to the plane on which the sensor data lie.
Figure 11-8 Two views at two different points in time during the full scan.

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) 156 Operating Instructions, 08/2012
Note
For how to handle the 3D View, see The "3D View" tab (Page 132)
If you do not notice any movement: Replace the connectors of the two 2D laser scanners and repeat the procedure.
After establishing that the assignment is correct, you must reactivate the second 2D laser scanner.
11.8 Automatic calibration of the 3D sensor Before the TPS can function, the mounting positions of the 3D sensors used must be measured. This operation is known as calibration.
TPS can only be used in combination with a STS crane whose design has various symmetrical characteristics.
● The ground beneath the STS crane must be flat and clear of objects.
● The sill beams on the landside and on the waterside must essentially be constructed identically.
● The sill beams are implemented as a flat surface and are rectangular.
● The portal beams are installed above the sill beams.
● The four crane feet are essentially identical in construction.
● The crane feet have a rectangular cross-section.
● The 3D sensors are mounted beneath the portal beams.
● The size of the crane parts must not exceed certain limits (min, max).
Note
On this topic, refer to Chapter Crane (calibration) (Page 74).
11.8.1 Preparations for calibration TPS requires the necessary information to calculate the precise mounting positions of the 3D sensors. This information describes reference objects that are detected by TPS for calculating the absolute mounting position.
This information is:
● Parts of the crane design: Sill beam and crane foot
● The mounting orientation of the 3D sensor
● The rough mounting position of the 3D sensor beneath the portal beam

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) Operating Instructions, 08/2012 157
Note
The TPS assumes that the two sill beams and the four crane feet have the same design and can therefore be described with a single set of parameters.
Note
Also note in the Appendix the form for recording the parameter values (STS calibration parameter values form (Page 198)). First specify the determined values in this form so they can be transferred later to the parameter list for TPS START.
Design of the sill beam
● p3500 describes the exterior length of the sill beam
● p3501 describes the interior length of the sill beam
● p3502 describes the lower height above the floor of the sill beam
● p3503 describes the upper height above the floor of the sill beam
Note
See also Table 8-1 Parameter sill beams (Page 75)
Design of the crane foot
● p3504 describes the length of the crane foot at right-angles to the sill beam
● p3505 describes the width of the crane foot at right-angles to the sill beam
● p3506 describes the lower height of the free crane foot above the ground
● p3507 describes the upper height of the free crane foot above the ground
Positions of the 3D sensor
● p3510[n] describes the mounting height above the floor
● p3511[n] describes whether the swiveling unit is mounted on the left portal beam if you are looking toward the water
● p3512[n] describes the distance to the waterside sill beam
● p3513[n] describes the distance to the landside sill beam
Note
See also Table 8-3 Parameters mounting positions 3D sensors (Page 77)

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) 158 Operating Instructions, 08/2012
Fixed parameters
Parameters p2010 and p2100 define the calibration procedure type. Under normal conditions, these parameters must not be changed for STS cranes.
The default setting for parameter p2105 is FALSE and in normal conditions must not be changed for STS cranes.
Orientation of the 3D sensor
Parameter p3560 describes whether the 3D sensor is moving toward the water when it is traversed in the positive angular direction.
In the delivery version p3560 = true.
You can determine this parameter in situ standing with your back to the land side and looking toward the water. The position of the motor housing is decisive:
● The motor housing is on the left side of the 3D sensor: p3560[n] = true
● The motor housing is on the right side of the 3D sensor: p3560[n] = false
Note
See also Table 8-4 Parameters mounting options 3D sensors (Page 78)
11.8.2 Visual inspection of the set parameters Even before you calibrate the system, you should check the settings of the relevant parameters.
To do this, perform a full scan. Depending on the parameters set, objects will become visible in the scan result, allowing you to assess whether the set parameter values are correct.
For this, you must perform the following steps:
Full scan
1. Switch TPS to "Full Scan" mode. You will find instructions for this in The "Control panel" tab (Page 136).
2. Go to the "Working area → Overview → Global" tab.
3. Check whether the scan procedure has ended. The scan procedure has ended when status "FullScan Finished (Wait for Off)" is output for the relevant active lane.

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) Operating Instructions, 08/2012 159
Figure 11-9 Visual inspection, Global overview
Loading full scan data into TPS START
1. Go to the 3D View → Calibration / Lanes tab.
2. Click "Get Full Scan data from 3D sensor."
The scanned data are transferred and displayed in the 3D View.
Figure 11-10 Visual inspection, Calibration / Lane

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) 160 Operating Instructions, 08/2012
3. Select "3D-Sensor ID0" or "3D-Sensor ID1" to display the scan data of each 3D sensor.
Figure 11-11 Visual inspection, Calibration / Lane, 3D sensor ID0
Superimposing the crane parts to be identified onto the full scan results
1. Overlay the crane parts you have just parameterized into their environment.
Figure 11-12 Visual inspection, Calibration / Lane, 3D sensor ID0, Calbration settings
2. If you want to correct the parameter values you can switch between the parameter list (to correct the settings) and the 3D View, until the superimposed crane elements (calibration settings) correspond to the real situation (full scan data).

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) Operating Instructions, 08/2012 161
11.8.3 Example: Adapting the sill beam size In this example, parameters p3502 and p3503 are used to highlight the procedure for adapting the calibration parameters.
The blue rectangle that represents the sill beam is too wide. Switch to the parameter list to change the values there. Finally, return to the 3D View to check the new value, in this case the size of the sill beam.
Figure 11-13 Sill beam calibration, wrong parameters
The next figure shows what the display will look like if the actual structure corresponds to the parameter settings.
Figure 11-14 Sill beam calibration, correct parameters
Preconditions
To be able to perform automatic calibration, you must check the following:
● All parameters are correctly assigned.
● TPS Runtime shows no faults or warnings.

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) 162 Operating Instructions, 08/2012
Note • Calibrate the 3D sensors for each crane separately. • Make sure that no objects (containers, trucks, ...) are located inside the scan range of the
3D sensor before you start calibration.
Note
Calibrate the 3D sensors one after the other (first 3D sensor ID0, then 3D sensor ID1.
At the beginning of calibration:
Calibration is started by activating the "Calibration" operating mode.
You can do this either via the OPC interface or via the control panel; seeThe "Control panel" tab (Page 136).
1. Go to the Detail display → Control panel tab.
Figure 11-15 Sill beam calibration, Control panel
2. Click the "Assume control priority" button.
3. Choose "Calibration" from the "Operating Mode" selection list.

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) Operating Instructions, 08/2012 163
4. Click "Activate."
"Setpoint" shows that TPS is in "Calibration" mode and that the 3D sensors are being calibrated, i.e. that their mounting positions are being calculated.
Figure 11-16 Sill beam calibration, control panel, Calibration selected
You can follow the progress of calibration on the "Output TPS Runtime" tab.
Figure 11-17 Progress listing on the "Output TPS Runtime" tab

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) 164 Operating Instructions, 08/2012
"[laser X] Calibration was successful" is the most important output for each connected 3D sensor.
A message is output for each active lane informing you when automatic calibration is complete.
1. In the Working area, go to the "Overview → Global" tab.
2. Check whether any of the messages "Calib Finished (Wait for Off)," "Calib Idle (Wait for Off)," or "Calib Failed (Wait for Off)" is displayed.
Figure 11-18 Both units of work are complete and are waiting for "Off"

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) Operating Instructions, 08/2012 165
Checking automatic calibration
The objective of automatic calibration is to precisely measure the mounting position so that all 3D sensors used access a common coordinate system.
After automatic calibration, check whether that applies to your crane.
1. Go to the "Working area → 3D View → Calibration / Lanes" tab.
2. Activate both 3D sensors.
Figure 11-19 Uncalibrated view of both 3D sensors

Commissioning 11.8 Automatic calibration of the 3D sensor
Truck Positioning System (TPS) 166 Operating Instructions, 08/2012
3. Click on "Calibrated view."
The scan data of both 3D sensors is merged into a plausible common view.
Figure 11-20 Calibrated view of both 3D sensors
The meaning of the colors is explained in The "3D View" tab (Page 132)
11.8.4 Checking the mounting angle of the 3D sensors As soon as the TPS system has been successfully calibrated, you should check the mounting angle of the 3D sensors.
Depending on the position of the driver's cab, the angles of the 3D sensor should show the following values:
● For travel on the right side (driver's cab is on the left): -0.5° to -1.5°
● For travel on the left side (driver's cab is on the right): 0.5° to 1.5°
See also the drawing in Chapter Figure 4-3 Diagrammatic representation of mounting a 3D sensor (Page 37).
You can take the mounting angle fro parameter r2110.

Commissioning 11.9 Lanes
Truck Positioning System (TPS) Operating Instructions, 08/2012 167
Example:
● Mounting angle 3D sensor ID0: r2110[0] = -2.27988
● Mounting angle 3D sensor ID1: r2110[1] = -0.350204
In this example, the mounting angles of both 3D sensors are outside the tolerance range. They must be adapted manually.
Proceed as follows:
● 3D sensor ID0: Rotate through approx. 3.3°
● 3D sensor ID1: Rotate through approx. 1,2°
Calibrate the 3D sensors again and check the mounting angle until they are inside the tolerance range.
11.9 Lanes The lanes are beneath the portal of the STS crane. Their boundaries indicate to the driver into which range a truck is being guided. TPS needs a description of these lanes to be able to detect the position of the vehicles inside the lanes.
This section explains how to set up the lanes in the TPS coordinate system and map the positions of the trolley and spreader in the crane coordinates onto the lane.
Preconditions
● All lanes run beneath the portal beam.
● All lanes lie between the two sill beams.
● There are no gaps in the lane numbering.
● Each lane has a number.
● Each lane has a defined width.
● Each distance between two lanes has a defined width.
● Maximum 10 lanes are supported.

Commissioning 11.9 Lanes
Truck Positioning System (TPS) 168 Operating Instructions, 08/2012
11.9.1 Determining and marking the y origin
Figure 11-21 Determining the y origin
The boundaries of the lanes must be entered as dimensions (in cm) in the parameter list. For this, the y origin of the TPS coordinate system on the floor of the crane system must be determined. The boundaries of the lanes are then measured as the distance from this origin directly on the floor surface and then entered in the parameter list (p3620, p3621).
You must perform the following step before you can determine the position of the y origin:
1. Project the interior side of the land-side sill beam onto the floor. This gives you point y1.
2. Now measure, perpendicularly to the sill beam, the distance from y2 on the waterside sill beam (y2: corresponds to y1, but on the water side)
3. y0, the y origin of the TPS coordinate system is half way between y1 and y2. Mark this point on the floor surface.
4. Measure all lane boundaries as distances from y 0 on the floor. The distances from the y origin in the direction of the land side have a negative sign. All distances from the y origin in the direction of the water side have a positive sign.
11.9.2 Configuring the lanes
Note
Also note in the Appendix the form for recording the parameter values (STS lanes parameter values form (Page 199)). First specify the determined values in this form so they can be transferred later to the parameter list for TPS START.

Commissioning 11.9 Lanes
Truck Positioning System (TPS) Operating Instructions, 08/2012 169
Each lane is described by three parameters:
● p3610[n] defines the ID of the lane
● p3620[n] landside y position of the lane
● p3621[n] waterside y position of the lane
Note • Enter the values in centimeters. • Please note that the positional information refers to the TPS coordinate position
unless otherwise stated; see also The TPS coordinate system (Page 71).
We recommend assigning the IDs of the lanes from the land side toward the water side. The lane that is furthest from the water side is assigned the ID "0" (p3610). If you proceed in this way, the values of the y coordinates of the lane boundaries increase continuously.
Parameterize the lanes one after the other. Enter the value for the first land-side lane in p3610[0], p3620[0], and p3621[0]. Enter the value for the second lane (as seen from the land side) in p3610[1], p3620[1], and p3621[1] etc.; see also the diagram on Lanes (Page 78).
Figure 11-22 Configuring lanes, superimposing a full scan
You can also check individual lanes by selecting them from the selection list.
Lanes can often be seen best in the sensor image in the boundary area of the view. You must adapt the parameter values of each lane in the parameter list until the parameterized lanes (green) coincide with the scan result.

Commissioning 11.9 Lanes
Truck Positioning System (TPS) 170 Operating Instructions, 08/2012
Figure 11-23 One lane, incorrectly parameterized
Figure 11-24 One lane, correctly parameterized
Finally, enter the number of the first lane on the water side (p3600) and the first lane on the land side (p3601) in each case.
In this example, p3600 = 1 and p3601=10.

Commissioning 11.9 Lanes
Truck Positioning System (TPS) Operating Instructions, 08/2012 171
11.9.3 Working area of the 3D sensors
Figure 11-25 Assignment of 3D sensor to lane number
To recognize the working processes beneath the crane automatically, the movement of the trolley (y axis) and the movement of the crane hoist (z axis) are evaluated. For this, information is received from the crane and placed in relation to the lanes.
In the relevant parameters, define which lanes are covered by which 3D sensor. 3D sensor ID0 is responsible for lanes 1 to 5 and 3D sensor ID1 is responsible for lanes 6 to 10.
You must define four parameters for each 3D sensor:
● In p3700[n], repeat the ID of the 3D sensor, that is, p3700[0] = 0 and p3700[1] =1
● In p3701[n] enter the lowest lane number that the 3D sensor covers.
● In p3702[n] enter the highest lane number that the 3D sensor covers.
● In p3703[n] you enter the number of the lane above which the 3D sensor in question is mounted (best range of view for the 3D sensor.)
If a 3D sensor is mounted directly above a lane, enter the ID of that lane. If the 3D sensor is mounted between two lanes, enter the average value. If the 3D sensor is mounted, for example, between lanes 2 and 3, then enter 2.5.

Commissioning 11.9 Lanes
Truck Positioning System (TPS) 172 Operating Instructions, 08/2012
11.9.4 Coordinate conversion between crane controller and TPS To be able to exchange positional data between the crane controller and TPS via the OPC interface, a uniform coordinate system must be applied. TPS assumes that the crane controller processes positional data that is compatible with the TPS coordinate system and passes it to TPS via the OPC interface; seeThe OPC coordinate system for data exchange with the crane controller (Page 73).
The procedure applied below must be followed to place the position definition of the crane controller in relation to the position definition within the TPS coordinate system.
1. Place the spreader in the center of lane no. 1 (accuracy: See also Single spreader or tandem spreader? (Page 173).
2. Read out the positional values from the crane controller for the hoist and trolley of the spreader (value in the coordinate system of the crane).
You can read out these values from the crane controller using the OPC SCOUT or you can read them from the display parameter r207 (Detail display → Symbol browser tab).
3. Enter the value for the trolley in p3602.
4. Enter the value for the hoist in p3603.
Note
Enter the values in centimeters.
Remember that the PLC expects the data from the OPC SCOUT to be entered in millimeters.

Commissioning 11.9 Lanes
Truck Positioning System (TPS) Operating Instructions, 08/2012 173
11.9.4.1 Single spreader or tandem spreader? In p3605 you define whether TPS runs in single-spreader mode or in tandem-spreader mode. Default setting p3605 = false, therefore single-spreader mode. With p3605 = true you switch TPS to tandem-spreader mode.
Figure 11-26 Position of the spreader in single-spreader and tandem-spreader mode
Please note when converting coordinates:
● If parameter p3605 = false (single-spreader mode), the spreader must be positioned on the center of the lane with the lowest number.
● If p3605= true (tandem-spreader mode), the spreader must be positioned at the center between the two lanes with the lowest number.
11.9.5 Checking the lane settings Now check the assignment of the lanes while you traverse the spreader between the lanes. In the Symbol Browser, you can see where the spreader is located from the point of view of TPS Runtime. The lane number is calculated by TPS from the spreader position and output for the waterside (r216) and the landside (r226) spreader.
First check in parameter r207 whether the values for the current position of the trolley were correctly applied. You can compare the transferred values in the OPC SCOUT (lengths entered in mm!) with the values in the Symbol Browser. The value in r207 constantly increase for a movement from the land side to the water side.
You can only check parameters r216 and r226 when the values of the crane controller have been correctly transferred. If the settings of the lanes are correct and you move the spreader along the lanes, you will be able to follow in parameters r216 and r226 on which lane each spreader is located. If you cannot, check the settings of the lane or parameter p3602.

Commissioning 11.10 Truck models
Truck Positioning System (TPS) 174 Operating Instructions, 08/2012
11.10 Truck models Before TPS can reliably detect a truck, you must first acquire the trucks used in your system as models and parameterize them in TPS.
The trucks must meet the following design requirements:
● The truck must have a driver's cab.
● The driver's cab must have a cuboid shape.
● The driver's cab must be located in the front region of the truck.
● The driver's cab is the highest built-on element on the truck.
● No other built-on elements are located behind the driver's cab.
● The king pin is located behind the driver's cab.
As for the lanes (see Chapter Lanes (Page 167)), you must first scan the truck to be able subsequently to check the truck model against the scan result.
11.10.1 Creating truck models As for the lane boundaries above, you must first scan the truck to be able subsequently to check the truck model against the scan result. Then you can set the necessary parameters.
1. Direct a vehicle whose model you want to create into a lane and park it near the stop position.
2. Assume control priority in TPS START (see The "Control panel" tab (Page 136)).
3. Select a lane that runs directly beneath a 3D Detail display.
4. Select the "Lane Scan" operating mode (Detail View → Control Panel, selection list "Operating Mode").
5. Make the following settings:
– Spreader size
Enter the applicable spreader size.
– Travel direction from left
Enter "true" (from the left) or "false" (from the right.)
– Lane
Enter the number of the lane in which the vehicle is located.
6. Click "Activate."
7. If Detail display "Lane Scan finished (Wait for Off)" is displayed in the global overview (Detail View→ Overview→ Global), the procedure is complete.
8. Select the "Off" operating mode.
In general, every scan action should be finalized by changing to "Off" mode.
9. Now you can show the scanned-in vehicle in the 3D View. To do that, go to the "3D View → Vehicle models" tab.

Commissioning 11.10 Truck models
Truck Positioning System (TPS) Operating Instructions, 08/2012 175
10. Click the "Get Lane Scan data from 3D sensor" button.
11. Then select a 3D sensor in Section "Sensor data."
The current lane scan data of the selected 3D sensor is displayed in the view.
12. If necessary, show the sensor data of the 3D sensor.
Figure 11-27 Lane scan data (3D sensor ID0) of the truck machine with the container trailer
13. Now start parameterization of the truck model. Open the parameter list, activate the truck model (p3100[n] = true) and enter a name (p3101[n]).
14. Now you must assign the other parameters p3102[n] to p3107[n] that describe the driver's cab and the position of the king pin. Enter the parameters in following order:
– p3103 = 0
– p3102
– p3105
– p3106
– p3107 for the driver's cab
– p3104 for the king pin
Technical drawings are often available from which you can take the dimensions of the various truck machines: See also Trucks (Page 82).

Commissioning 11.10 Truck models
Truck Positioning System (TPS) 176 Operating Instructions, 08/2012
15. Go to the 3D View → Vehicle models tab and activate the truck model in each case.
Figure 11-28 Side view showing the superimposed truck model

Commissioning 11.10 Truck models
Truck Positioning System (TPS) Operating Instructions, 08/2012 177
16. As you can see from the screenshot above, the model of the truck (brown) is not behind the actual driver's cab. Therefore move the superimposed scan until the scan data and the model coincide well. To obtain the various views of the vehicle, use the "Rotx" and "Roty" adjustment wheels.
Note
Instructions for operating the 3D View are given inThe "3D View" tab (Page 132).
Figure 11-29 Side view with the superimposed truck model, after being moved

Commissioning 11.10 Truck models
Truck Positioning System (TPS) 178 Operating Instructions, 08/2012
17. Derive the two values p3105[n] and p3106[n] from a front and top view.
Figure 11-30 Front view showing the superimposed the truck model
18. Switch to the parameter list. In it, increase the value of p3107 and then evaluate the result in the 3D View.
19. Measure the value for the king pin (p3104) as it cannot be seen clearly and is often concealed by the trailer. It is therefore not displayed.
20. Parameterize all the other truck models that you want to use as described above.

Commissioning 11.11 Container trailer models
Truck Positioning System (TPS) Operating Instructions, 08/2012 179
11.11 Container trailer models The following minimum requirements for the container trailer design apply:
● A container trailer must have a visually distinctive beginning and a visually distinctive end and have main bars along its length.
● A container trailer must have at least 1 crossbar that extends along its entire width.
● The crossbars and main bars must be at least 20 cm thick.
● A container trailer must have a rib structure.
● A container trailer must have a rigid structure (reinforced by panels, for example.)
● A container trailer must have a uniform height without projecting built-on accessories, with the exception of flippers.
● A container trailer must be suitable for transporting common container sizes.
● A container trailer must have flippers at the front and back.
11.11.1 Creating container trailer models
Basic information Every container trailer model must be described using parameters; the procedure is therefore basically the same as for the truck models.
You can read the meaning of each parameter in the Truck Positioning System Parameter Manual. For the configuration of a trailer, see "Container trailer (Page 84)."
Take the positions and dimensions of each part of the trailer from the technical drawings and enter them in the parameter list.
Only one container trailer model
If you only use one trailer model on the system, the minimum number of parameters could be:
● p3200[n]: "true" = activate model [n]
● p3201[n]: Provide the container trailer with a name
● p3202[n]: Assign the front position
● p3203[n]: Assign the end position
● p3204]n]: Width of the container trailer
● p3205[n]: Height of the container trailer
● p3250[n] -p3269[n]: Parameters for all main bars
● p3270[n]-p3299[n]: Parameters for all crossbars
● p3210[n]-p3225[n]: Parameters for all sidebars
Set the parameters in this sequence, too.

Commissioning 11.11 Container trailer models
Truck Positioning System (TPS) 180 Operating Instructions, 08/2012
Multiple container trailer models
Different container trailers can have very different designs. So there is a large number of parameters to define a trailer model. Define the trailer model with the greatest possible level of detail when a TPS must maintain multiple trailer models.
You must enter the parameter values for each container trailer model that has to be maintained by TPS.
The procedure
Note
In the following account, we assume that you have already entered the truck as a model.
1. Perform a lane scan; refer to Creating truck models (Page 174).
2. Display both the truck and the trailer into the display.
3. Switch to the parameter list to change the parameters there.
4. Check your entries in the 3D View.
Figure 11-31 Real sensor data with a superimposed model of a truck and trailer

Commissioning 11.11 Container trailer models
Truck Positioning System (TPS) Operating Instructions, 08/2012 181
● The following figure shows a simple model that has only been defined in p3200, p3201, p3202, p3203, p3204, p3205. Add a main bar, crossbar, and a plate to this model.
Figure 11-32 Simple trailer model superimposed on lane scan
● In the following figure, a plate and some cross bars have been entered in the front region of the trailer model. The gray stripe shows the extent of the plate. The brown lines show the position of the crossbars.

Commissioning 11.12 Positioning
Truck Positioning System (TPS) 182 Operating Instructions, 08/2012
Figure 11-33 Trailer, simple model with plate
● Now parameterize all the trailer models that you want to use on the system.
11.12 Positioning After you have set all parameters, you can switch on TPS. This is done by entering the necessary values on the "Control panel" tab (or via the crane controller).
1. Go to the "Control panel" tab:
2. Fetch the control priority.
3. Set the "Positioning" operating mode.
4. Check the following:
– Driving direction
– Container size
– Lane

Commissioning 11.12 Positioning
Truck Positioning System (TPS) Operating Instructions, 08/2012 183
11.12.1 Check the position calculation 1. To check the vehicles, go to the 3D View tab → Position monitoring.
2. First activate all elements on the right-hand side of the tab (vehicle, position marking, TPS coordinate system, direction of travel, and the two 3D sensors).
3. Drive a vehicle into the set lane. Check the set direction of travel because otherwise the system will not work correctly.
Now you can track the movement of the vehicle in the 3D View.
Figure 11-34 Position check of the container during vehicle entry
4. Switch to the global overview or to the icon browser to read the exact position.
5. Use the position marking for 20 ft and 40 ft to estimate the calculated position. You can also lower the spreader to check whether the position has been determined correctly.

Commissioning 11.12 Positioning
Truck Positioning System (TPS) 184 Operating Instructions, 08/2012
6. Observe whether the vehicle model is moving in a way that matches the sensor data.
7. Check whether the vehicle model displays coincides with reality. To view this match simply, you should work in the system with a container trailer. Only when you have described all trailers, should you activate them all.
Figure 11-35 Final parking position of an empty trailer for 40-ft position
11.12.2 Checking the coincidence signal The spreader height is used to ascertain whether the spreader is covering the view of the parking vehicles.
1. First check in parameter r206 whether the values for the current position of the hoist were correctly applied.
2. Compare the transferred values in the OPC SCOUT (lengths entered in mm!) with the values in the Symbol Browser. The value in r206 must increase for motion from the ground upward.
3. Check in parameter r232[n] whether coincidence has been achieved. For a downward motion of the spreader, the signal (true: free view; false: hidden) must come to the height of the gantry beam if the spreader is lowered above the specified lanes.
4. If this signal does not arrive, you must adapt p5000 or p3603.

Commissioning 11.13 Alternate system configurations
Truck Positioning System (TPS) Operating Instructions, 08/2012 185
11.13 Alternate system configurations
Configuration with two 3D sensors
Figure 11-36 System configuration with TPS START on PC/PG
Note
The TPS software for installation on a PC/PG is contained on the TPS CD.
Configuration with one 3D sensor
Figure 11-37 System configuration with one 3D sensor

Commissioning 11.13 Alternate system configurations
Truck Positioning System (TPS) 186 Operating Instructions, 08/2012
Note
An xml file with example parameterization for this system configuration is available at: TPS_START\Examples\TPS_V11_Parameter_1_Sensor.xml

Truck Positioning System (TPS) Operating Instructions, 08/2012 187
Troubleshooting / FAQs 1212.1 General problems
This chapter provides you with tips on how to locate and troubleshoot frequently occurring problems with SIMOCRANE TPS. Possible faults and warnings in TPS Runtime are described in the SIMOCRANE TPS Parameter Manual. This description is offered to you in TPS START as part of the on-line help.
Problem Possible cause Remedy
Check whether the power switch is on. The device is not operational. There is no power supply to the device. Check whether the power supply is on. One or more OPC variables are incorrect or missing.
Adjust file "scores7.txt " to match the current interface DB in the crane controller.
TPS Runtime does not start when the sensor controller is restarted. Autostart call of TPS Runtime is
not correctly configured. Check the automatic start function of TPS Runtime and adjust it, if necessary.
Wrong IP address. Check the IP address or local host. No CAT5 Ethernet cable plugged in or cable is damaged.
Make sure that the cables are properly connected: TPS START cannot connect to TPS Runtime.
Wrong Ethernet interface used. Use Ethernet interface 2 for the connection with TPS Start.
There is no power supply to the 3D sensor.
Check the power supply (cables, power pack) to the 3D sensor. Check the connections of the RS422 and USB communication buses.
There is a defect on the communication bus.
Check the cable for defects. The RS 422 interface is malfunctioning.
In the Windows device manager, check whether the mouse is being detected on the interface. If it is, deactivate the mouse on the interface in the device manager.
Connection to laser faulty (RS 422).
The COM properties are not properly set.
Check the properties (baud rate, latency timer) of the affected COM interface in the Windows device manager. Restart the PC once you have made your changes.
The 3D sensor's scan line appears as a circle about 8 m away from its origin.
The unit of length of the 3D sensor has probably been configured incorrectly.
Connect the SIMOCRANE Sensor Controller with the LMSIBS software. Use the password "SICK_LMS". Under "LMS > Configuration", change the unit from mm to cm. Save the change and restart the PC.

Troubleshooting / FAQs 12.1 General problems
Truck Positioning System (TPS) 188 Operating Instructions, 08/2012
Problem Possible cause Remedy There is no power supply to the servo motor.
Check the power supply (cables, power pack) to the servo motor. Check the connections of the CAN communication bus. Check the cable for defects.
There is a defect on the communication bus. Check the device manager.
Check the terminating resistors (120 Ω) of the CAN bus.
Communication with the servo motor is faulty.
Is an incorrect version of the servo motor set in the software (p1333)?
The CAN interface is malfunctioning.
Check the adapter drivers in the Windows device manager. Re-install the drivers for the adapter if necessary. Check the properties (module ID 16, 17, or 18, 250 k) of the affected CAN interface.
The CAN properties are not properly set.
Check whether the module ID of the CAN interface in PowerCube (Initstring) matches the module ID specified in the Windows device manager.
Connection to servo motor faulty (CAN).
The CAN ID is set incorrectly. The CAN ID can be changed with Schunk Corp. software.
Voltage drop at the servo motors.
Servo motors are not synchronized.
Synchronize the servo motors. To do this, restart the TPS Runtime: • Restart of the TPS Runtime from TPS START
(TPS Runtime → Restart, or
• Restart the TPS Runtime from the crane controller via the OPC interface.
The general interface for Industrial Ethernet is lost when a restart is performed.
Reload the XDB file.
The trailer model is not in the database.
Check the models in the parameter list.
The wrong direction of travel is selected.
Check the selected direction of travel.
The wrong lane is selected. Check the selected lanes. The laser system is in the wrong operating mode.
Select the "Positioning" mode.
The truck is covered. Raise the spreader above the portal beam. The system is not calibrated. Check the system calibration. You will find further
information on this in the section titled Automatic calibration of the 3D sensor (Page 156).
The system has not received any valid data in "Cold Restart" mode. The "Success" bit is not set.
Switch to "Laser System Off" mode and restart the system.
The "Data valid" bit is not set in the "Positioning" mode. Spreader is covering the truck.
Check the height of the spreader.
The truck is not detected.
Truck is within the search range for "Cold Restart" mode (< 3 meters).
Switch to "Cold Restart" mode.

Troubleshooting / FAQs 12.1 General problems
Truck Positioning System (TPS) Operating Instructions, 08/2012 189
Problem Possible cause Remedy The truck is moving too quickly. Drive more slowly! The trailer model is not in the database.
Check the models in the parameter list.
The wrong direction of travel is selected.
Check the selected direction of travel.
The wrong lane is selected. Check the selected lanes. A system error is present. Check the system status. Further information is
available in Section JJ:??? The system is not calibrated correctly.
Check the system calibration. You will find further information on this in the section titled Visual inspection of the set parameters (Page 158).
The spreader is covering the truck. Raise the spreader until it is above the portal beam. The laser is dirty. Clean the laser.
The truck is parked incorrectly.
The spreader settings are incorrect.
Set the correct spreader values.
No truck is present. "Check lane for truck"
Park a truck.
Signal confirming spreader has landed. Container does not appear. "Wait for spreader landed"
Place the spreader on the container in the lane.
The truck is in the wrong lane. Change the settings of the lane. The spreader is covering the laser. Raise the spreader.
Sequence control stops running.
The system has an undefined status.
Switch to "Laser System Off" mode and restart the system. Then switch to "Positioning" mode.
The truck is not detected. Check the models in file "env". The laser system is in the wrong operating mode.
Select "Cold Restart" mode.
Truck is outside the search range for "Cold Restart" mode (> 3 meters).
Switch to "Positioning" mode.
The spreader is covering the truck. Raise the spreader above the portal beam.
Cold restart does not work.
The truck is moving. Park the truck within the search range for "Cold Restart" mode (< 3 meters from the target).
Network problems following commissioning.
The same IP or MAC address has been used more than once in the network.
• Define unique IP addresses. • Define unique MAC addresses.
Error message "Calibration failed".
See the chapter titled Automatic calibration of the 3D sensor (Page 156) If error messages are still being issued, pass your recordings, including resources and version numbers, on to the Siemens hotline.
The sides are shown reversed in the "3D view" tab.
The laser scanner is mounted rotated by 180° in the swiveling unit.
Install the laser scanner correctly; see Mounting the 3D sensor (Page 34)
Sensor controller is no longer working.
Sensor controller defective. Send your sensor controller to Siemens to be repaired or order a replacement PC.

Troubleshooting / FAQs 12.1 General problems
Truck Positioning System (TPS) 190 Operating Instructions, 08/2012
Problem Possible cause Remedy PLC ⇔ Sensor controller timeout.
OPC connection is faulty. • Check Ethernet/CAN bus • Check the power supply of the sensor controller • Hard disk of the sensor controller full? • Run checkdisk on the hard disk of the sensor
controller
Message "No license found". License is not present or has been removed.
Use the SIMATIC License Manager to check the license status. Reinstall the license, if necessary.
CAN bus is generating communications errors at a baud rate of 250 kB but operating normally at lower baud rates.
Wrong cable has been used (impedance not 120 Ω). Cable has been installed incorrectly.
Test the CAN cabling: • Check cable type • Check how cable laid • Shielding correct? • Resistors correct?

Troubleshooting / FAQs 12.2 No connection to the crane controller
Truck Positioning System (TPS) Operating Instructions, 08/2012 191
12.2 No connection to the crane controller
Note Test for OPC variables
If no connection can be established with the crane controller, this can have various different causes: • Wrong OPC server set. • OPC server is not running. • OPC server settings incorrect. • OPC variables incorrect (name, type).
Only the last case can be more precisely examined using test parameters.
If the OPC connection is not established, you can test this connection with p257. In test mode, you can find out how many variables are supposed to be valid in regular operation. You can define the number of testable variables with p258. Before you activate test mode, you should first check whether the connection with OPC SCOUT can be established (see Checking the connection (Page 95)) and whether the file scores7.txt has been generated and correctly stored (see Data assignment with scores7.txt (Page 87)).
If the connection to OPC SCOUT is working, but the OPC connection cannot be established by the TPS application, you can use the test mode to check whether an OPC variable is causing the problem.
If the TPS application is started, all OPC variables are also registered on the OPC server. If an OPC test connection is established, a limited number of OPC variables is registered on the OPC server. (Enter a suitable value in p258). If the connection is established with fewer variables, the problem variable must be outside the range that is limited by the value in p258 (1 to [p258]).
Example:
The OPC connection is not established with the following settings:
● p257 = true
● p258 = 51
The OPC connection is established with the following settings:
● p257 = true
● p258 = 50
The connection problem is therefore caused by the variable with the number 51.
Often, a missing or incorrectly entered variable name in scores7.txt is the source of the problem.

Troubleshooting / FAQs 12.2 No connection to the crane controller
Truck Positioning System (TPS) 192 Operating Instructions, 08/2012

Truck Positioning System (TPS) Operating Instructions, 08/2012 193
Appendix AA.1 List of abbreviations
2D Two-dimensional 3D Three-dimensional CAN Controller Area Network DP PROFIBUS DP ENV Environment HMI Human Machine Interface IE Industrial Ethernet I/O In / Out (input and output module) OLE Object Linking and Embedding OPC OLE for Process Control PLC Programmable Logic Controller STS Ship-to-Shore TPS Truck Positioning System USB Universal Serial Bus

Appendix A.2 Installation checklist for the Truck Positioning System
Truck Positioning System (TPS) 194 Operating Instructions, 08/2012
A.2 Installation checklist for the Truck Positioning System
3D sensor landside:
Project:
________________________
Commissioning engineer:
________________________________________
Crane:
________________________ Date:
________________________________________
No. Description Comments OK Not OK 1. Check the position of the 3D sensor. See Mechanical installation (Page 33) 2. Check the mounting position of the laser
scanner within the swiveling unit. See Mounting the 3D sensor (Page 34)
3. Check the CAN ID number on the 3D sensor (ID=16).
See the label on the 3D sensor.
4. Check the angle of rotation of the laser scanner.
See Mechanical installation (Page 33)
5. Check the bracket. The mounting surface for the 3D sensor must be level. There must be no gaps between the mounting bracket and the 3D sensor. Manually move the swiveling platform evenly.
6. Check the cable glands (2) on the 3D sensor.
7. Have the correct cables been used for the power supply? 48 V (servo), 24 V (electronics), 24 V (heating element)
Must be at least 7 x 4 mm2.
8. Check the CAN bus communication of the particular cable type (servo motor).
At least 2 x 2 x 0.5 mm2 shielded twisted-conductor cables.
9. Check the serial communication of the cable type used for the laser scanner (RS 422).
At least 3 x 2 x 0.5 mm2 shielded twisted-conductor cables.
10. Check the setting of the heating element in the 3D sensor.
Must be at least 5º C.
11. Check the terminating resistor (120 Ω) at the "dead end" of the CAN cabling.
The terminating resistor is supplied with power via the 3D sensor.

Appendix A.2 Installation checklist for the Truck Positioning System
Truck Positioning System (TPS) Operating Instructions, 08/2012 195
No. Description Comments OK Not OK 12. Remove the connector on the 3D sensor.
Switch the power supply on and check the voltage at the connectors.
Pin 1(+)-2(-) 48 V (servo) Pin 3(+)-4(-) 24 V (electronics) Pin 5(+)-6(-) 24 V (heating element) Ground (the yellow/green wire must be connected to ground) (Harting connectors)
13. Connect the 3D sensor and switch on the heating element.
Comments:
3D sensor waterside:
Project:
________________________
Commissioning engineer:
________________________________________
Crane:
________________________ Date:
________________________________________
No. Description Comments OK Not OK 1. Check the position of the 3D sensor. See Mechanical installation (Page 33) 2. Check the mounting position of the laser
scanner within the swiveling unit. See Mounting the 3D sensor (Page 34)
3. Check the CAN ID number on the 3D sensor (ID=17).
See the label on the 3D sensor.
4. Check the angle of rotation of the laser scanner.
See Mechanical installation (Page 33)
5. Check the bracket. The mounting surface for the 3D sensor must be level. There must be no gaps between the mounting bracket and the 3D sensor. Manually move the swiveling platform evenly.
6. Check the cable glands (2) on the 3D sensor.
7. Have the correct cables been used for the power supply? 48 V (servo), 24 V (electronics), 24 V (heating element)
Must be at least 7 x 4 mm².
8. Check the CAN bus communication of the particular cable type (servo motor).
At least 2 x 2 x 0.5 mm2 shielded twisted-conductor cables.
9. Check the serial communication of the cable type used for the laser scanner (RS 422).
At least 3 x 2 x 0.5 mm2 shielded twisted-conductor cables.

Appendix A.2 Installation checklist for the Truck Positioning System
Truck Positioning System (TPS) 196 Operating Instructions, 08/2012
No. Description Comments OK Not OK 10. Check the setting of the heating element
in the 3D sensor. Must be at least 5º C.
11. Check the terminating resistor (120 Ω) at the "dead end" of the CAN cabling.
The terminating resistor is supplied with power via the 3D sensor.
12. Remove the connector on the 3D sensor. Switch the power supply on and check the voltage at the connectors.
Pin 1(+)-2(-) 48 V (servo) Pin 3(+)-4(-) 24 V (electronics) Pin 5(+)-6(-) 24 V (heating element) Ground (the yellow/green wire must be connected to ground) (Harting connectors)
13. Connect the 3D sensor and switch on the heating element.
Comments:

Appendix A.2 Installation checklist for the Truck Positioning System
Truck Positioning System (TPS) Operating Instructions, 08/2012 197
Sensor controller (Microbox PC):
Project:
________________________
Commissioning engineer:
________________________________________
Crane:
________________________ Date:
________________________________________
No. Description Comments OK Not OK 1. Check the power supply of the sensor
controller. See Power supply (Page 44)
2. Check the terminating resistor (120 Ω) at each dead end on the bus.
The terminating resistor (dead end) must be attached between pins 2 and 7 on the 9-pin SUB-D connector.
3. Check the hardware configuration of the COM ports.
RS422 COM 3 and 4 (standard).
4. Check the raw data scan in TPS START with the waterside 3D sensor.
See Commissioning the terminals for communication with the crane controller (Page 148)
5. Check the raw data scan in TPS START with the landside 3D sensor.
See Commissioning the terminals for communication with the crane controller (Page 148)
6. Check the WS servo-CAN communication @ 250 kbps. Check the directions of motion (positive in relation to the water side).
See Commissioning the terminals for communication with the crane controller (Page 148)
7. Check the LS servo-CAN communication @ 250 kbps. Check the directions of motion (positive in relation to the water side).
See Commissioning the terminals for communication with the crane controller (Page 148)
8. Grounding of the 48 V power supply. GND (0 V) of the power supply must not be connected to ground.
9. Grounding of the 24 V power supply. GND (0 V) of the power supply must not be connected to ground.
10. Check the Ethernet connection to the PLC.
Use a "ping" command to check communication between the Microbox and the PLC.
11. Use the OPC Scout software to check OPC communication between the sensor controller and the PLC.
OPC Scout software is installed on the sensor controller. All signals must indicate the quality (Good). See Chapter 9 of the operating manual. Default project "Laser Tech-OPC.opp" communication DB in the PLC must be loaded (default DB970).
Comments:

Appendix A.3 STS calibration parameter values form
Truck Positioning System (TPS) 198 Operating Instructions, 08/2012
A.3 STS calibration parameter values form

Appendix A.4 STS lanes parameter values form
Truck Positioning System (TPS) Operating Instructions, 08/2012 199
A.4 STS lanes parameter values form

Appendix A.5 Glossary
Truck Positioning System (TPS) 200 Operating Instructions, 08/2012
A.5 Glossary Checker The term "checker" refers to the person who is tasked with comparing the number of a container which is currently being loaded / unloaded with the packing list number and ensuring that it is subsequently transported to the correct location. In most cases, the checker sits in a cabin near the lanes.
Gantry The gantry is the traveling gear which moves the crane along the quay wall.
(Main)Hoist The main hoist refers to the crane hoist which lifts the spreader and container(s).
Portal beam These are the crossbeams on a crane situated above and at right angles to the lanes. They are parallel to the direction of movement of the trolley.
Sill beam The sill beams are the lower longitudinal beams on a crane situated along the gantry and parallel to the quay wall.
Spreader A spreader is the framework on which a container or containers are suspended.
Trolley The trolley is a moveable carriage which moves along the trolley beam in the direction of water or land, carrying with it the spreader with container(s) and driver's cab.

Appendix A.6 ESD information
Truck Positioning System (TPS) Operating Instructions, 08/2012 201
A.6 ESD information Electrostatically sensitive devices (ESD) are single components, integrated circuits or devices that can be damaged by electrostatic fields or electrostatic discharges.
Rules for handling ESD components:
During the handling of electronic components, pay attention to the grounding of the person, workplace and packaging!
Personnel may only come into contact with electronic components, if
● they are grounded with an ESD wrist band, or
● they are in ESD areas with conductive flooring, ESD shoes or ESD grounding straps.
Electronic components should be touched only when this is unavoidable. They must only be handled on the front panel or, in the case of printed circuit boards, at the edge.
Electronic components must not be brought into contact with plastics or clothing made of artificial fibers.
Electronic components may only be placed on conducting surfaces (table with ESD coating, conducting ESD foamed material, ESD packing bag, ESD transport container).
Electronic components may not be placed near display units, monitors or televisions (minimum distance from the screen > 10 cm).
Measurements may only be taken on boards if the measuring instrument is grounded (via protective conductors, for example) or the measuring probe is briefly discharged (for example, through contact with a bare metal housing) before measurements are taken with an isolated measuring device.

Appendix A.6 ESD information
Truck Positioning System (TPS) 202 Operating Instructions, 08/2012