
Signal, Instruments and Systems Project 5: Sensor accuracy in environmental sensor networks.
17
Signal, Instruments and Systems Project 5: Sensor accuracy in environmental sensor networks
-
date post
21-Dec-2015 -
Category
Documents
-
view
223 -
download
5
Transcript of Signal, Instruments and Systems Project 5: Sensor accuracy in environmental sensor networks.
Signal, Instruments and SystemsProject 5:
Sensor accuracy in environmental sensor networks
IntroductionWe deal with the important question of calibration of sensor
devices. Here we focuse on the Mica-Z temperature sensor.
How can we obtain the best accuracy limiting the costs ?
I. Experiments to collect data
II. Methods of calibration : the interpolating polynomial
III. Results
IV. Difficulties met and observations
Experiments done
Differents experiments : at ambiant temperature cooling (1) fast heating (2) cooling and then smooth heating (3)
First results : reference data always under the measured one. the gap between the two raised at the extremes.
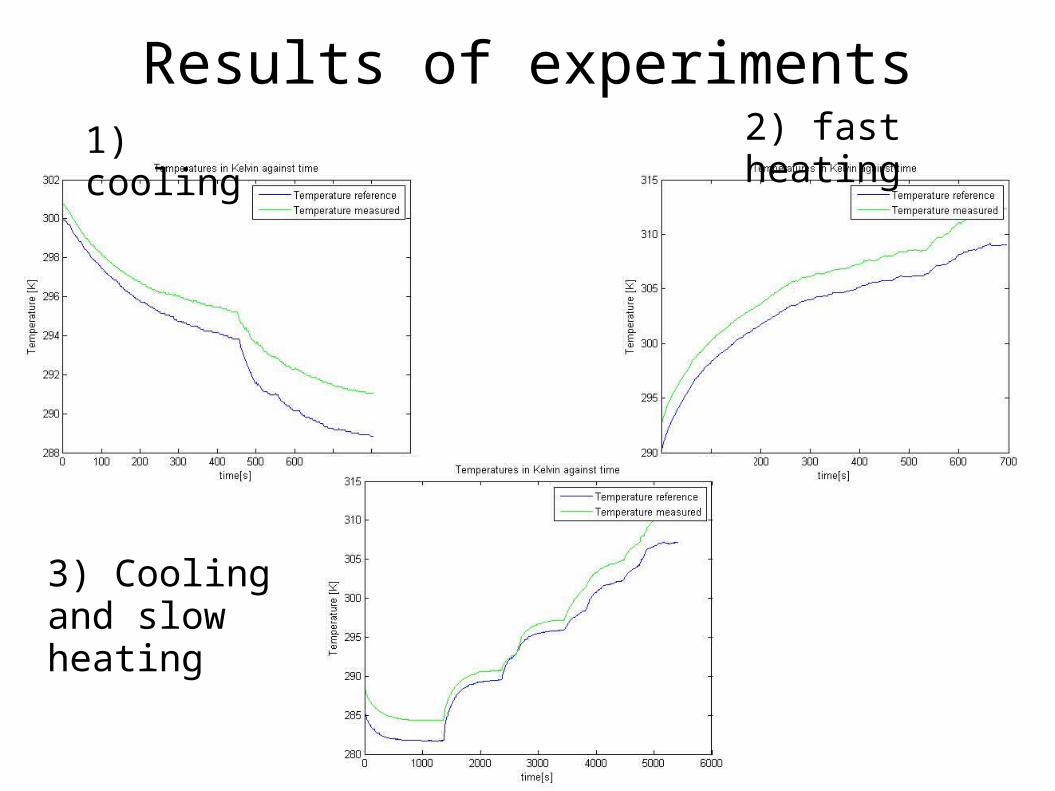
Results of experiments1) cooling 2) fast heating
3) Cooling and slow heating
Calibration : Methodology Hypothesis :
The difference between the reference temperature and the observed one depends on the temperature.
We create a vector ε =Treference – Tobserved
We use polyfit function to calculate an interpolating polynomial ε(Tobserved) to match ε.
The calibrated temperature is equal to :
Tcalibrated = Tobserved + ε(Tobserved)
Calibration : The interpolating polynomial
For each set of data collected, we create several polynomials of different degrees.
We compare them. The final choice of the experiment and the degree used are
experimental.
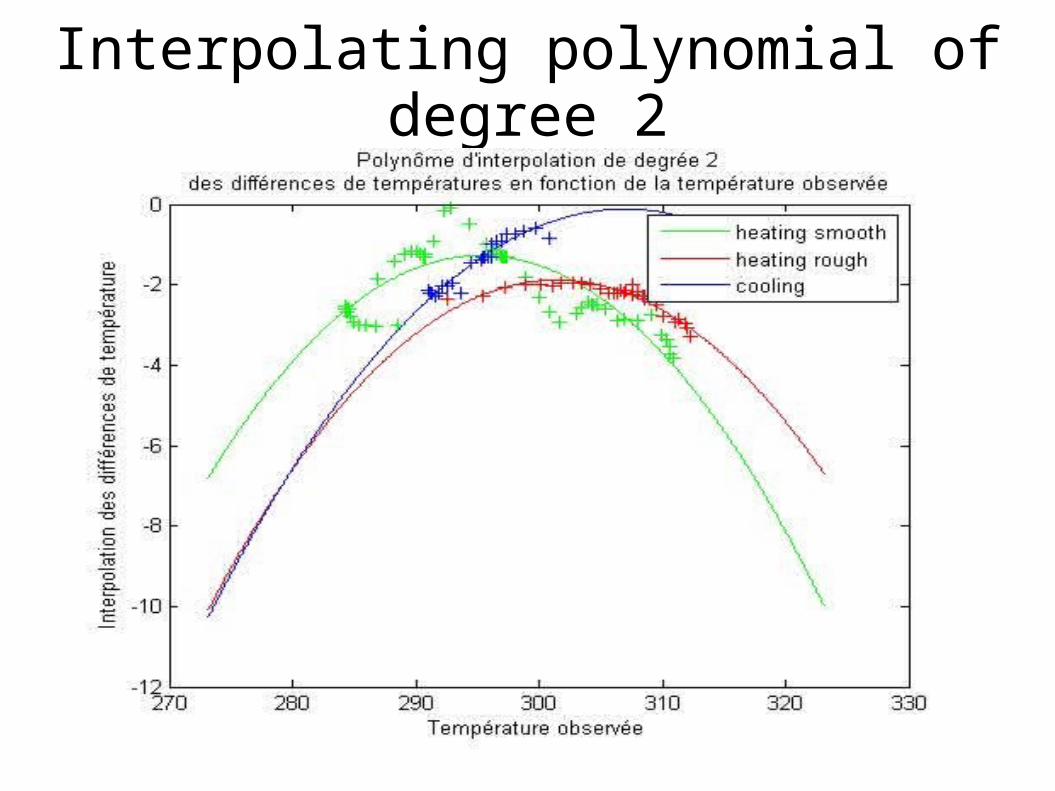
Interpolating polynomial of degree 2
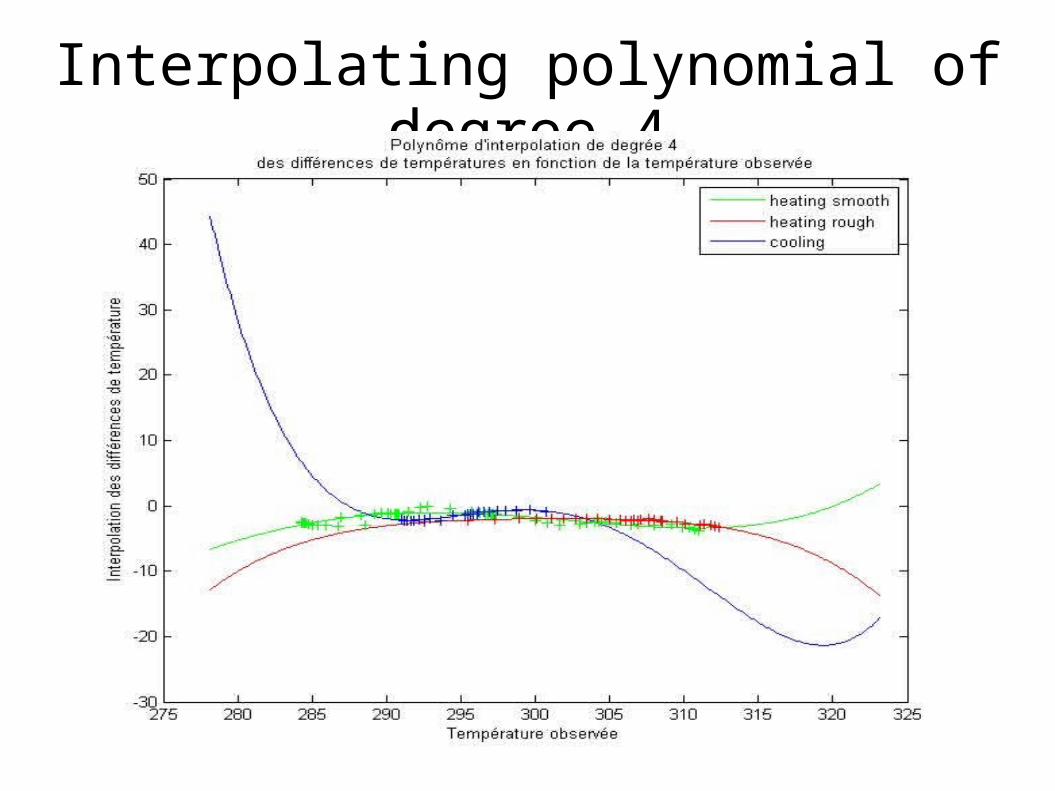
Interpolating polynomial of degree 4
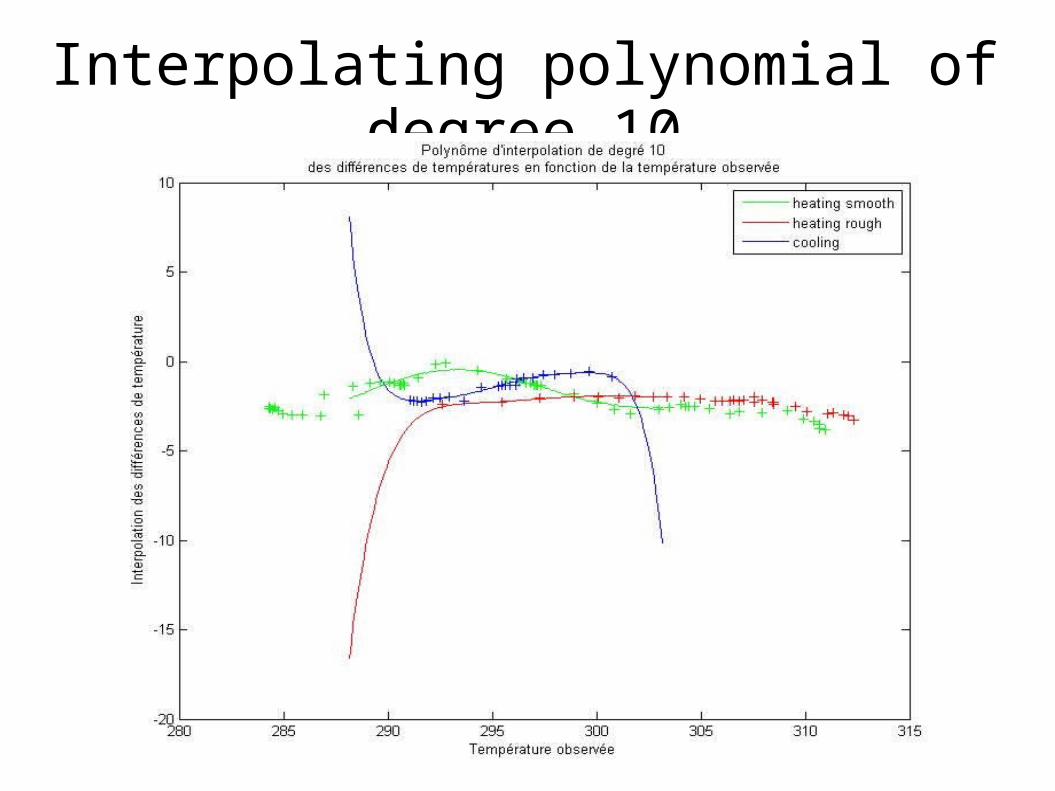
Interpolating polynomial of degree 10
Interpolating polynomial : observations
The higher the degree is, the more the interpolating polynomial fits the data.
BUT with a high degree, the divergence is greater and faster when there is no data.
We decide to keep the slow heating experiment data to calibrate our sensor (more data).
The calibration will be valid over a greater range of temperature.
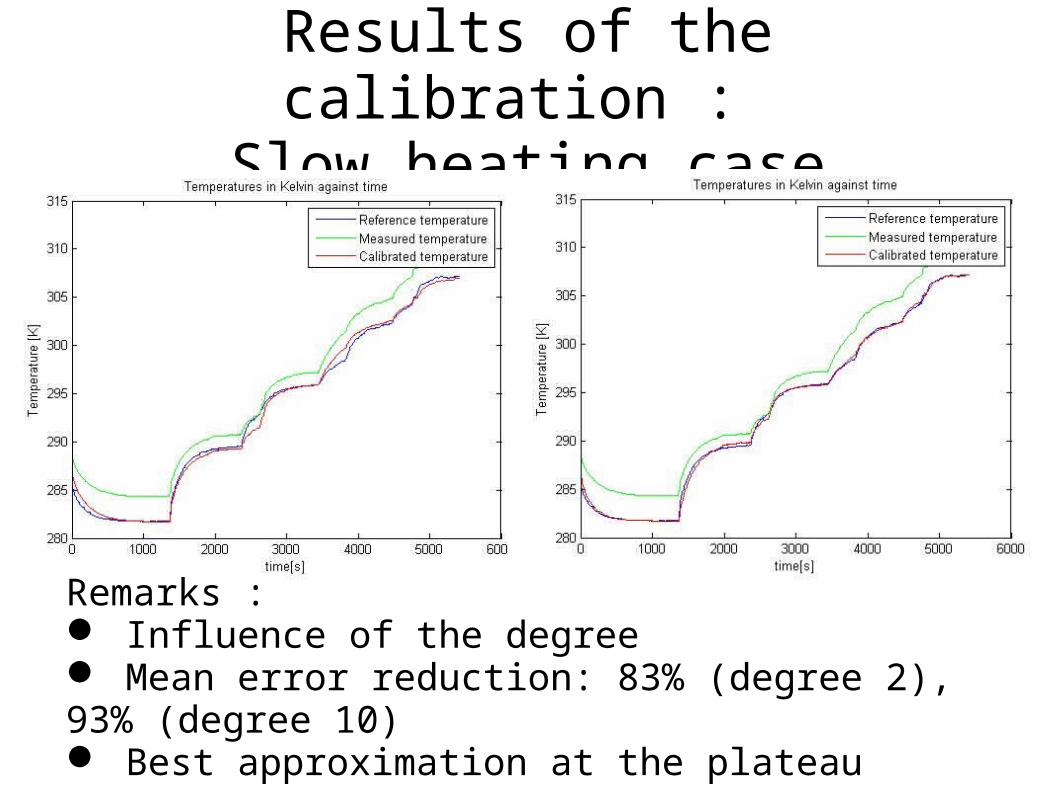
Results of the calibration : Slow heating case
Remarks : Influence of the degree Mean error reduction: 83% (degree 2), 93% (degree 10) Best approximation at the plateau
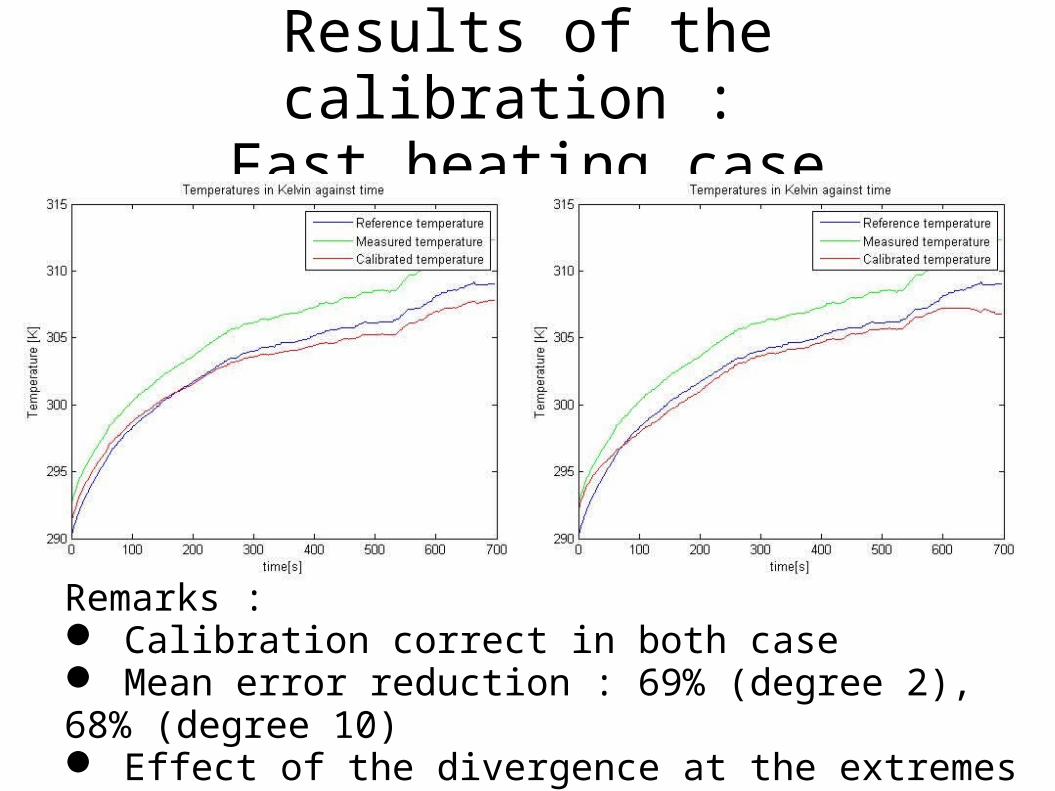
Results of the calibration : Fast heating case
Remarks : Calibration correct in both case Mean error reduction : 69% (degree 2), 68% (degree 10) Effect of the divergence at the extremes
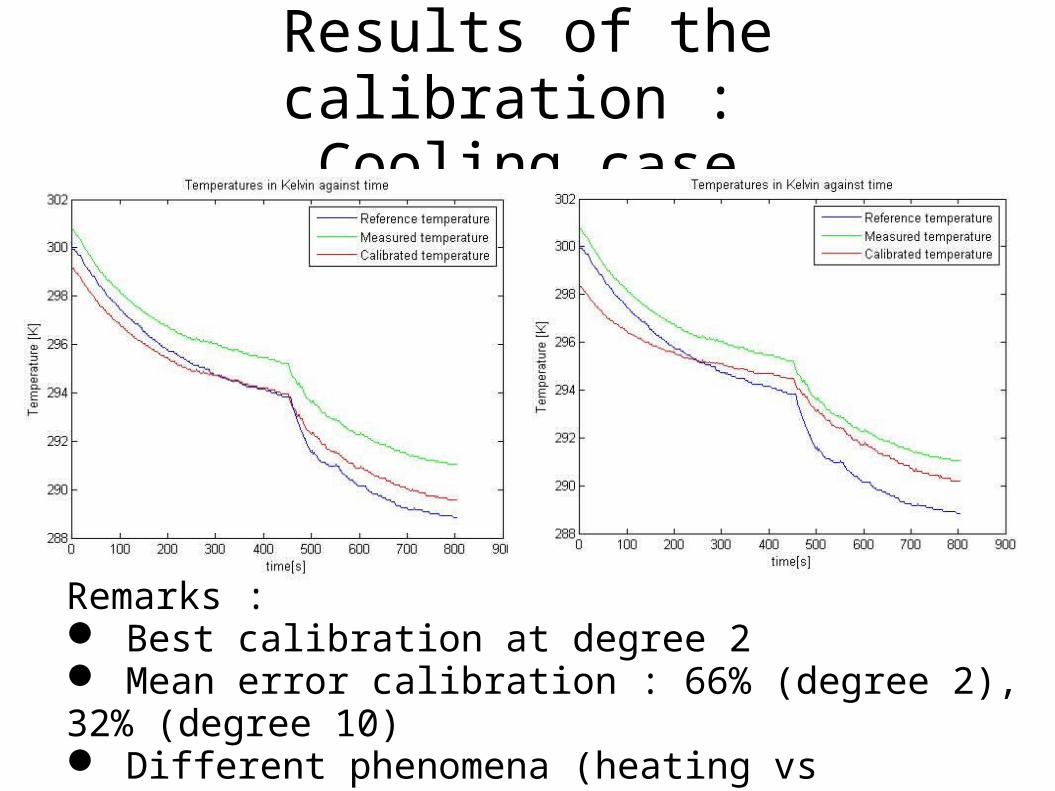
Results of the calibration : Cooling case
Remarks : Best calibration at degree 2 Mean error calibration : 66% (degree 2), 32% (degree 10) Different phenomena (heating vs cooling ?)
Difficulties and observations
The difference of temperature between our sensor and the reference one seems to vary in each experiment for a given temperature.
Example : at 292.5 Kelvin :
ε1═ -0.16 K; ε2═ -1.71 K; ε3═ -2.28 K
Existence of a latency between the real temperature and the measure one ?
Different adaptation time between cooling and heating ?
Difficulties and observations
We don't obtain the same results in the behavior of the curve !
First experiments : the difference between the reference and observed sensors raises at extreme temperature
New experiments : the difference between the reference and observed sensors is smaller at extreme temperature !
Local turbulence ?
Conclusion
The slow heating curve seems to be valid to correct a rising temperature or for non variating temperature.
To improve our calibration, the best is to have the most data as possible and at the largest scale
Choice of the calibration’s degree: depend on what we want
To extrapolate : small degree
To be precise inside the range of obs. temp : high degree
Another experiment ?
Thank you for your attention !
Any questions ?
















![Detection Accuracy Gas Formula Range (0-50 %LEL)...SM-DS-0003-15 7 Long-Term Accuracy/Stability Repeatability Sensor # Average [%LEL] Standard Deviation [%LEL] Sensor 1 50.8 0.15 Sensor](https://static.fdocuments.in/doc/165x107/613b31b5f8f21c0c8268dcd6/detection-accuracy-gas-formula-range-0-50-lel-sm-ds-0003-15-7-long-term-accuracystability.jpg)
