shakir ppt_final
21
Rama institute of Engineering & Technology Presentation On “THE WALL FOLLOWER WITHOUT SENSOR” Submitted to: Mechanical Engineering Department Submitted by: Shakir hussain Sahil shekh Saurav katiyar Shashibushan tiwari Santosh kr. chaudhary
-
Upload
shakir-hussain -
Category
Documents
-
view
46 -
download
4
Transcript of shakir ppt_final

Rama institute of Engineering & Technology
Presentation On
“THE WALL FOLLOWER WITHOUT SENSOR”
Submitted to:
Mechanical Engineering Department
Submitted by:
Shakir hussainSahil shekhSaurav katiyar Shashibushan tiwari Santosh kr. chaudhary

CONTENTS• Introduction
• Objectives of project
• Components
• Circuit and schematic explanation
• Working
• Applications
• Comparison
• Conclusion
• Future scope
• Cost analysis
• Reference

INTRODUCTION
• This is a wall following device which can follow the wall
without programming.
• Range detectors are replaced by Limit switches.
• Limit switches are used to control the motion of wheels.

Wall follower

OBJECTIVE OF PROJECT
• To discard the use of sensors and other microchips and full fill
our goal. i.e. Follow the wall.
• To reduce the cost of the system.
• To make workable on under any circumstances.
• Free from environment effect.

COMPONENTS
• 2- Limit switches
• 2- 60 rpm motor
• 2- 7cm diameter wheels
• 12 volt-Battery
• Power switches and connecting wires

LIMIT SWITCH• Limit switch are automatic switches.
• They control the wheels by turning power on and off according to the motion desired.


STEPPER MOTOR
• A stepper motor is an electromechanical device which converts electrical
pulses into discrete mechanical movements.
• The shaft or spindle of a stepper motor rotates in discrete step increments
when electrical command pulses are applied to it in the proper sequence.
• The motors rotation has several direct relationships to these applied input
pulses.
• The speed of the motor shafts rotation is directly related to the frequency
of the input pulses and the no. of rotation is directly related to the
number of input pulses applied

Stepper motor

12V-BATTERY
• Batteries operate by converting chemical energy into electrical energy
through electrochemical discharge reactions.
• Batteries are composed of one or more cells, each containing a positive
electrode, negative electrode, separator, and electrolyte .
• Cells can be divided into two major classes: primary and secondary.
• Primary cells are not rechargeable and must be replaced once the
reactants are depleted.
• Secondary cells are rechargeable and require a DC charging source to
restore reactants to their fully charged state.

12 v battery

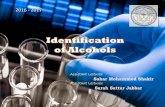
LIMIT 1 LIMIT 2
BATTERY
MOTOR 1MOTOR
2
CIRCUIT DIAGRAM

WORKING
• There are two limit switches in the front of device as it touches
the wall it will work and help follower to turn.
• The function of both switches are :
a) At normal position the motor rotates and follower starts moving
in forward direction, if any restriction come in the way the limit
switch is pressed then NC starts reacting as NO and NO as NC.
b) So one motor is stop while the other is keeps rotating.
c) So the device turns and follow the wall.

APPLICATIONS
• If spiral type well is there, then we can use for some research in the
well.
• It can also be used in doing research on planets with unknown
surroundings, it will walk on the surface of any planet around the
space shuttle and we can observe the surface of planet.
• It can be used in long pipes to check the fault ,if any.

COMPARISON
Wall follower with sensors
• It is very costly due to use
of different types of I.C’s
and other sensors.
• Limited application due to
surrounding conditions like
high temp, pressure etc.
Wall follower without sensors
• It is cheaper as no I.C is used.
• Limit switches works
efficiently in any condition.

CONCLUSION
• A comprehensive introduction to the hardware design of a wall
follower robot, the wall - follower is shown in this report. the
robot works pretty well and shows a great potential for future
uses.

FUTURE SCOPE
• Sensors can be attached to the followers to detect the presence of harmful gases, chemicals etc.
• A flying wall follower is a possibility in which limit switches can be used to control the direction by controlling the propellers.

COST SN. EQUIPMENT COST
1. BATTERYBALANCING WHEEL 40
2. NUT BOLT 50
3. BATTERY 510
4. MOTOR (60 rpm) 440
5. LIMIT SWITCH (5) 200
6. TOWEL SWITCH (3) 150
7. 2 WHEEL (7cm) NUT BOLT 180
8. OTHER COST 430
9. TOTAL COST 2000

REFERENCES
• [1] Out Of the Box robotics,• http://ootbrobotics.pixelgeko.com/store/products/epiphany-diy/• [2] 8-bit AVR XMEGA A1 Microcontroller Preliminary,
http://www.atmel.com/Images/doc8067.pdf• [3] 8-bit AVR XMEGA A Microcontroller Manual,
http://www.atmel.com/Images/doc8077.pdf• [4] Data sheet of PING))) Ultra Sonic Distance Sensor (#28015),• http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf• [5] Data sheet of Sharp GP2D120XJ00F IR Range Finder,
https://www.sparkfun.com/datasheets/Sensors/Infrared/GP2D120XJ00F_SS.pdf
• [6] CMU cam 4 Command List v1.02, http://cmucam.org/projects/cmucam4/documents

THANK YOU…