Servo Valve Analysis

of 8
-
Upload
chandrasingh4564 -
Category
Documents
-
view
233 -
download
0
Transcript of Servo Valve Analysis
-
8/13/2019 Servo Valve Analysis
1/8
Proceedings of IM ECE 20012001 ASME International Mechanical En gineerin g Cong ress & ExhibitionNovember 11-16, 2001, New York, N ew York, USA
IMECE01/DSC-2B-1DYNAMIC REDESIGN OF A FLOW CONTR OL SERVO-VALVEUSING A PRESSURE CONTROL PILOT
Perry Y. LiDepartment of Mechanical EngineeringUniversity of Minnesota111 Church St. SE,Minneapolis, Minnesota 55455Email: pli @me.umn.edu
ABSTRACTIn this paper, the dynamic performance of an unconventional
two-spool flow control servo valve using a pressure control pilotis analyzed. Such valves are less expensive than typical servo-valves but also tend to be limited in their dynamic performance.Based on a previously developed eight state nonlinear model, wedevelop a simplified linear model which is able to capture the es-sential dynamics of the valve. Using root locus analysis method,the limitation in dynamic performance is shown to be due to azero introduced by the structure of the interconnection of thesubsystems. Design parameters that move the zero further tothe left half plane, and do not adversely affect other steady statecriteria are identified. The effectiveness of these parameters toimprove the dynamic performance is demonstrated.
1 In t rod u ct i onMost designs o f servo flow control valves [4] consist o f a
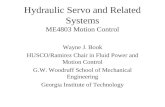
single spool boost stage, a nozzle flapper pilot, and a feedbackwire. These valves have very high performance but tend to beexpensive because of the stringent manufacturing tolerances andthe complicated assembly process. A less common, commer-cially available alternate design (Fig. 1) consists o f a pressurecontrol pilot stage and a boost stage that uses two separate spoolsto independently meter flow into and out of the valve. Sincethe critical dimensions are easier to adjust, post assembly andfeedback wire is not used, such valves are easier to manufactureand to assemble. Consequently they tend to be cheaper. Read-ers are also referred to [1], in which an experimentally validated
complete physical model is presented, for a more detailed dis-cussion of the advantages of the unconventional two-spool servovalve. Despite these advantages, the unconventional two-spoolservo valve design tends to have lower dynamic performance interms of bandwidth compared to the conventional servo valvedesign utilizing a single spool and a feedback wire. For ex-ample, the valves studied in [1], [3] have bandwidths between15-40Hz whereas conventional servo-valves of similar rating canhave bandwidths of over 100Hz. It would therefore be advanta-geous if dynamic response of the two-spool design can be im-proved.
In this paper, we study the unconventional two-spool designso as to understand the nature of the performance limitation, andto suggest design modifications for potential performance im-provements. The experimentally validated eight state nonlinearphysical model derived in [1] consists of the interconnection ofthree subsystems. This model is similar to the one constructedby Lin and Akers previously [3]. Using this model, we developa simplified five state linear model that retains the interconnec-tion structure as well as the predominant dynamics. The reducedmodel reveals a puzzling aspect of the valve dynamics in thateach of the three subsystems has bandwidth at least an order ofmagnitude higher than the bandwidth of the complete model. Us-ing simple root locus arguments, it is found that the way in whichthe subsystems are interconnected creates a zero which causesthe bandwidth of the in terconnected system to be significantlylower than the individual subsystems. Based on this insight, sev-eral systems parameters that can potentially improve the dynamicperformance without adversely affecting the steady state perfor-
I Copyright 2001 by ASME
Proceedings 2001 ASME International Mechanical Engineering Congress and Expositio
November 11-16, 2001, New York, N
IMECE2001/DSC-24563
DSC TOC
-
8/13/2019 Servo Valve Analysis
2/8
Null 7S
Magi
)rtag
dagnetic)r Plata
)nPlate
T h i s t e n d s to i n c r e a s e t h e p r e s s u r e P 2 a n d t o d e c r e a s e t h e p r e s -s u r e P l . T h e d i f f e r e n ti a l p r e s s u r e a c t s o n t h e t w o e n d s o f th e t w os p o o l s in t h e b o o s t s t a g e . S i n c e t h e s p o o l s a r e s p r i n g c e n t e r e d ,t h e i r e q u i l i b r i u m d i s p l a c e m e n t s w i l l b e r o u g h l y p r o p o r t i o n a l t ot h e d i f f e r e n t i a l p i l o t p r e s s u r e a n d i n v e r s e l y p r o p o r t i o n a l t o t h es p r i n g s t i ff n e s s . F l o w i n t o a n d o u t o f t h e v a l v e a r e s e p a r a t e l ym e t e r e d i n a n d o u t a c c o r d i n g t o t h e d i s p l a c e m e n t s o f t h e tw os p o o l s .
Tran~
Figure 1.pilot state.
o o l B
n g
. . . . . . . a . v .A two -spool flow control servo-valve using a pressure control
m a n c e ( s u c h a s f l o w g a i n ) a r e i d e n t if i e d , a n d t h e i r e ff e c t s d e m o n -s t r a t ed .
T h e r e s t o f th e p a p e r i s o r g a n i z e d a s f o l lo w s . I n s e c t io n 2 , w ef o r m u l a t e a s i m p l i f i e d m o d e l o f t h e t w o - s p o o l f l o w c o n t r o l s e r v ev a l v e . T h e i n t e rc o n n e c t io n s o f t h e t h re e l i n e a ri z e d s u b s y s t e m sa r e s tu d i e d u s i n g r o o t l o c u s t e c h n i q u e s i n s e c t i o n 3 . S e c t i o n 4p r e s e n t s t h e e ff o r t t o o p t i m i z e t h e p e r f o r m a n c e b y a p p l y i n g t h ei n s i g h t s g a i n e d i n s e c t i o n 3 . S e c t i o n s 5 a n d 6 c o n t a i n d i s c u s s i o na n d c o n c l u d i n g r e m a r k s r e s p e c ti v e l y .
2 Simpl i f ied model of the two-spool f low controlservo valveT h e u n c o n v e n t i o n a l f l o w c o n t ro l s e r v e v a l v e s h o w n i n F i g .
1 u s e s a t w o - s p o o l b o o s t s t a g e a n d a p r e s s u r e c o n t r o l f l a p p e r -n o z z l e p i l o t s ta g e . T h e t w o s t a g e s a r e s e p a r at e d b y a s i m p l e t r a n -s i ti o n p l a te a n d c o n n e c t e d v i a t w o p r e s s u r e c h a m b e r s .
T h e d e s i g n p h i l o s o p h y o f t h e v a l v e i s a s f o l l o w s . T h e p r e s -s u r e c o n t r o l p i l o t s t a g e g e n e r a t e s a d i f f e r e n t i a l p r e s s u r e b e t w e e nt h e t w o f l u i d c h a m b e r s a d j a c e n t t o t h e f l a p p e r , d e t e r m i n e d b y t h ec u r r e n t i np u t t o a n d t h e t o r q u e g e n e r a t e d b y t h e e l e c t r o m a g n e t i ct o r q u e m o t o r . F o r e x a m p l e , i f th e t o r q u e m o t o r a p p l i e s a c o u n t e rc l o c k w i s e t o r q u e t o t h e f l a p p e r , t h e f l a p p e r d i s p l a c e s t o t h e r i g h t .
2 . 1 F l e v i e w o f fu ll s t a t e m o d e lT h e s e r v e v a l v e c an b e c o n s i d e r e d a n i n t e r c o n n e c ti o n o f
t h r e e s u b s y s t e m s , l ) t h e p i l o t s u b s y s t e m w h o s e s t a t e s a r e t h ef l a p p e r d i s p l a c e m e n t x f ( l e f t t o r i g h t p o s i t i v e ) a n d v e l o c i t y ~ f ;2 ) t h e p r e s s u r e c h a m b e r s w h o s e s t a t e s a r e th e c h a m b e r p r e s s u r e sP ] a n d / ) 2 ; a n d t h e b o o s t s t a g e s p o o l d y n a m i c s w h o s e s t a t e s aret h e d i s p l a c e m e n t s a n d v e l o c i t ie s o f t h e t w o s p o o l s Xa, Yea an d Xb,~ b . T h e r e f o r e , t h e t o t a l n u m b e r o f s t a t e s is e i g h t .
F o l l o w i n g [ 1 ], t h e d y n a m i c s o f t h e p i lo t s u b s y s t e m c a n b er e p r e s e n t ed b y :
M p : i f + B t ~ -I- p x f = A n ( P I - P 2 ) +4 ~ C 2 : [ ( X f o + X f ) 2 P l - ( x f o - x f ) 2 p 2 ] + g ( x f , i ) 1 )
w h e r e M p , B p a n d ~ : p a r e r e s p e c t i v e l y t h e c o m b i n e d i n e r t i a ,d a m p i n g a n d m e c h a n i c a l s t i f fn e s s o f t h e f la p p e r , X f o i s the nu l ln o z z l e - f l a p p e r g a p w h e n x f = O , a n d C d f i s t h e d i s c h a r g e c o -e f f i c i e n t o f t h e f l a p p e r - n o z z l e , A n i s t h e n o z z l e a r e a . T h e f i rs ta n d s e c o n d t e r m s o n t h e r i g h t h a n d s i d e c o r r e s p o n d r e s p e c t i v e l yt o t h e p r e s s u r e a n d t h e f l o w i n d u c e d f o r c e s a t t h e n o z z l e , a n dg ( x f , i ) , w h i c h i s a h i g h l y n o n l i n e a r f u n c t i o n ( s e e [ 1 ] f o r d e t a i l s ),r e p r e s e n ts t h e f o r c e o n t h e f l a p p e r g e n e r a t e d b y t h e e l e c t r o m a g -n e t i c to r q u e m o t o r w i t h i n p u t c u r r e n t i .
T h e d y n a m i c s o f t h e t w o b o o s t s t a g e s p o o l s a r e g i v e n b y :MsX a Jr nsfa ~ 2Ksx a = (P2 - P l ) A s -?f(xa:Pa)fCa-f X a , P a ) X a
t r a n s i e n t f l o w force steady state flow forceMsJib + B s:h, + 2K sxb = (P2 - P I ) A s +
t r a n s i e n t f l o w f o r c e s t e a d y s t a t e f l o w force
(2)
(3)
w h e r e Xa and Xb r e p r e s e n t t h e u p w a r d d i s p l a c e m e n t s o f s p o o l sA a n d B r e s p e c t i v e l y , M s i s t h e s p o o l i n e r t i a , B s i s t h e v i s -c o u s d a m p i n g c o e f f i c i e n t , 2 K s i s t h e t o t a l s t i f f n e s s o f t h e t w os p r i n g s a b o v e a n d b e l o w t h e s p o o l s ( F i g . 1 ) , A s i s t h e s p o o la r e a. T h e s t e a d y s t a te a n d t r a n s i e n t f l o w f o r c e s m a n i f e s t th e m -s e l v e s a s s p r i n g f o r c e s a n d p o s i t i v e / n e g a t i v e d a m p i n g f o r c e s w i t hK f ( . , . ) > O , a n d B f ( x , P ) > 0 w h e n x > 0 , B I ( x , P ) < 0 w h e n
2 C o p y r i g h t 2 0 0 1 b y A S M E
-
8/13/2019 Servo Valve Analysis
3/8
x < 0 , a n d n o t w e l l d e f in e d w h e n x = 0 . T h e r e f o r e , d e p e n d i n g o nt h e s i g n o f t h e s p o o l d i s p l a c e me n t , t h e t r a n s i e n t f lo w f o r c e m a yi n t r o d u c e n e g a t i v e d a m p i n g e f f e c t s .Th e t h i r d s u b s y s t e m i s a s s o c i a t e d w i t h t h e d y n a m i c s o f t h e
p r e s s u r e s P l , P 2 i n r e s p e c t i v e l y t h e u p p e r a n d t h e l o w e r f lu i dc h a m b e r s c o n n e c t i n g t h e p i l o t s t a g e a n d t h e b o o s t s t ag e s p o o l.
Q I ( P l , x f ) - f l (t ) ; [~2 = ~ Q 2 ( P 2 , x f ) - f '2( t)P1 VI (t) V2(t) (4)
H e r e , O l ( P l , x f ) a n d Q 2 ( P z , x y ) a r e t he to ta l f lows in to the up -p e r a n d l o we r c h a mb e r s , V l ( t ) a n d V 2 ( t ) a r e t h e v o l u m e s i n t h echam bers , and 13 i s the com press ib i l i ty o f the f lu id . Q] ( P l , X f )a n d Q E ( P 2 , x f ) a r e c o m p r i s e d o f t h e f lo w s f r o m t h e p i l o t s u p p lyo r i f ic e , l e a k a g e p a s t t h e n o z z l e , a n d t o a s m a l l e x t e n t , l e a k a g epas t the spoo l s: fo r i = 1 and 2 ,
Q i : C d o A o ~ 2 ( P s p - P i ) - - C d f E O n ( x f o - b x f ) ( - ~ P i - - l e a k a g e i(5)
1 . I n t h e s p o o l s y s t e m, we c o n s i d e r o n l y t h e t o t a l s p o o l d i s -p l a c e m e n t ( n o t th e d i s p l a c e m e n t s o f t h e i n d iv i d ua l s p o o l s )Z ( t ) = - - ( X a ( t ) + X b ( t ) ) .
2 . I n t h e p r e s s u r e c h a m b e r s y s t e m , w e c o n s i d e r o n l y t h ed i f f e r e n t i a l p r e s s u r eA P ( t ) = P l ( t ) - P 2 ( t ) .
3 . T h e t r a n s ie n t c o m p o n e n t o f t h e f l o w f o r c e s a n d l e ak a g ef l o ws p a s t t h e s p o o l s a r e i g n o r e d .4 . Th e p i l o t s ta g e d y n a m i c s i n (1 ) , t h e s p o o l d y n a mi c s i n ( 2 )-( 3 ) a n d t h e d i f f e r e n t i a l p r e s s u r e d y n a m i c s o b t a i n e d f r o m ( 4 )a r e l i n e a r i z e d a t t h e e q u i l i b r i u m c o n d i t i o n g i v e n b y f l a p p e rd i s p l a c em e n t x f = 0 , c h a m b e r p re s s u r es P l = P 2 = : / ~ , s p o o ld i s p l a c e me n t s Xa = Xb = 0 , spo o l v e loc i t i e s :~a = :~b = 0 ,ch am ber vo lu m es V1 = V2 = ( I /10 + V20) /2 = : I7 ', and w orkp r e s s u r e s P a = P b = P s / 2 w h e r e P s i s t h e b o o s t s t ag e s u p p l yp r e s s u r e .
T h e r e s u l t i n g r e d u c e d l i n e a r m o d e l s f o r t h e p i l o t , c h a m b e rp r e s s u r e a n d s p o o l s u b s y s t e m s a r e r e s p e c t i v e l y :
w h e r e " + " s i g n is u s e d f o r i = 1 a n d " - " s ig n is u s e d f o r i = 2 ,Psp i s t h e p i l o t s u p p l y p r e s s u r e ( wh i c h i s u s u a l l y l o w e r t h a n t h es u p p l y p r e s s u r e f o r t h e b o o s t s t a g e ) , A o i s t h e a r e a o f t h e o r i f ic et o t h e s u p p l y p r e s s u r e , C a o a n d C a f a r e t h e d i s c h a r g e c o e f f i c i e n t so f t h e o r i f i c e t o t h e s u p p l y a n d t h e g a p b e t we e n t h e f l a p p e r a n dn o z z l e . T h e f i rs t t wo t e r ms i n ( 5 ) a r e mo n o t o n i c a l l y d e c r e a s i n gf u n c t i o n s o f P i . Th u s , t h e y p r o v i d e a t l e a s t l o c a l e x p o n e n t i a l s ta -b i l i t y f o r t h e p r e s s u r e d y n a m i c s ( 4 ). N o t i c e a l s o t h e p i l o t s t a g ec o m m u n i c a t e s w i t h th e c h a m b e r p r e s s u r e s v i a Q I a n d Q 2 s i n c et h e y d e p e n d o n t h e f l a p p e r d i s p l a c e m e n t x y .
O n t h e o t h e r h a n d , t h e p r e s s u r e c h a mb e r s a r e a f f e c t e d b y t h ebo os t s t age sp oo l dy nam ics v ia V1 ( t ) , Vz( t ), f ' l ( t ) and f '2 ( / ) in(4 ) s ince
Pilot subsystemM p 2 f + B p ~ f + K p x f = ( An + B ) A P + G . i (9)
Pressure cham ber subsystemo tI ~A P 2 [~ x ~ - ~ . ( t )P = - ~ - T ~ f + ( 10 )
Spool subsystemM s ~ , + B s Y . + ( 2 K s + K / ) E = - 2 A s A P ( t ) ( 1 1 )
w h e r e
V1 = Vlo - A sxa - AsXb,V2 = V2o + Asxa + AsXbfzl = -- ~'2 = -AsYca -- as:~b
(6)(7)(8)
w h e r e V l o a n d V 2o a r e t h e c h a m b e r v o l u me s wh e n t h e s p o o l s a r ec e n t e r e d (Xa = xb = 0 ) . F o r d e t a i l s o f t h e mo d e l , r e a d e r s a r er e f e r r e d t o [ 1 ].2.2 Redu ced order l inear model
In order to obta in meaningful design informat ion, wec o n s i d e r a r e d u c e d 5 t h o r d e r l in e a r mo d e l . Th i s i s a c h i e v e d a sf o l l o ws :
G : = 3 g~i xz=O,i=o Ky := K y ( O , P s / 2 )~ g
K # = f f( p - 1 6 ~ C 2 f x o # - ~ x x /=0 , i=0
B : = 4 ~ C 2 f ~ f ' T - - - - ~--'x'Tf = ~ x f :r~Cf=~ Q J : , v = 0 = _ ~Qz
B , T a n d a a r e a l l p o s i t i v e q u a n t i t ie s . Th e e x p r e s s i o n f o r K ps h o ws t h a t t h a t n o z z l e f l o w f o r c e s a n d t h e m a g n e t i c s t e n d t o o f f -s e t t h e me c h a n i c a l s t if f n e s s R p o f t h e f l ap p e r. T h e t e r m An + B i n
3 C o p y r i g h t 2 00 1 b y A S M E
-
8/13/2019 Servo Valve Analysis
4/8
Step responses of n o n l i n e a r a n d l i n e a r m o d e l s
t ~ ,
~ ~
i
. . . . . . . . . . . . . . . . . . . . . . . . . . . i . . . . . . . .
: :- 1 4 0 I I0 .0 1 0 0 2 0 . 0 3 0 . 0 4 0 . 0 5 0 .0 6 0 . 0 7 0 . 0 8 0 , 0 9 0 . 1T i m e - sec
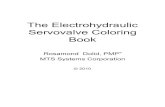
Figure 2. Differential pressure resp onse to a 20m A step inpu t current:full nonlinear m odel a nd simplified linearized m odel.
(9) is the apparent nozzle area of the flapper-nozzle upon whichthe pressure and the nozzle flow forces act. From (10), a is theconvergence rate of the pressure chamber normalized by the in-verse of the chamber capacitance, ~/V.
To verify that the linearized model in (9)-(11) indeed cap-tures the dominant dynamics of the valve, the responses to thestep current input are simulated for an input step size of i = 20mA(50% full range) using the complete nonlinear model in [1] andthe linearized model in (9)-(11). The step responses o f the differ-ential pressure AP(t) are very close (Fig. 2). The 64% rise-timefor the linearized and nonlinear models are 8.1 ms and 8.2ms re-spectively. The similarity among the responses of the model in(9)-(11) and of the full nonlinear model in [1] suggests that thedynamics of the system represented by the interconnection be-tween the pilot, pressure and spool dynamics are well capturedby the reduced order linear dynamics.
Each of the pilot (9), differential pressure (10), and the boostspool (9) subsystems are stable. Using physical parameters ofthe valve that are verified in [1], it can be shown that the pilotsubsystem has a natural frequency of (On,p = 3037 rad/s, and adamping ratio of ~v = 0.91; the differential chamber pressuresubsystem has an eigenvalue of -a ~ = -1599rad/s; the boostspool subsystem has a natural frequency of (on: = 1861rad/s witha negligible damping ratio of ~s = 0.025. The eigenvalues ofthe combined system are at -137.2rad/s, -7 02 4- 16475jrad/s,-2 83 7 4- 700jrad/s. We point out that the dominant pole is at- 137.2rad/s which is consistent with the fact that the 64% rise-time of the fully linearized model is 8.2 ms. In order to improvethe dynamic performance of the valve, the dominant pole mustbe moved further into the left half plane.
C h a m b e r / P i l o t system
P i l o t i
i2 1 _ 1 t IM,,~+B:+K , + K : , V
S p o o l
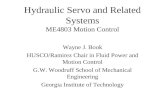
Figure 3. Block diagram for root locus analysis withhe pper feedbackloop as the nneroop. The actu al valve dynamics are obtained whenKI----K2= 1.
R o o t l o c u s of the dif l~ tia l p ressure p i l o t i n t e c o l n e c t l o n5 0 0
2 o o o
F o : . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . . . ..
_ 5 0 0 t t- 4 0 0 0 - 3 5 0 0 - 3 0 0 0 - 2 5 0 0 - 2 0 0 0 - 1 5 0 0 - 1 0 0 0 - 5 0 0 0 5 0 0Re a l d s
Figure4. Root locus diagram of the pilot cham ber dif f erentMI pressuresubsystem as K l increases from 0 ~ oo in Fig. 3 .
3 A n a l y s i s f o r p e r f o r m a n c e limitationWe now proceed o analyzehe inearizedmodel 9)-(11)to understand why the bandwidth o f the valve is relatively low,whereas the natural frequency of each individual subsystem isat least an order of magnitude higher. Is the limited perfor-mance due to the fact that the spools are too lightly damped(~ = 0.025)? Or, is the fluid capacitance in the pressure chamberthe reason? As we shall see, neither the spool damping nor thechamber capacitance is important. The key turns out to be thestructure of the interconnection between the pressure chamber,the pilot and the spool subsystems.
3 . 1 F u l l o r d e r r o o t l o c u sThe pilot, chamber pressure and the boost spool subsystemsare connected in a closed loop manner as shown in Fig. 3 with
4 Copyright 2001 by ASME
-
8/13/2019 Servo Valve Analysis
5/8
10~lOOI Ioctis OI the intolcomlec tk)n b etween spool and differential pressure / pilol subsystems2t . ~ . . . . . . . . . . , . . . . . . . . . . : . . . . . . . . . , . . . . . . . . . . : . . . . . . . . . , K 2 . - ~ 1 . . . . T . . . . . . . .
o i K : i i i i i . . . . . . . . . i ~ i . . . . . . . . . .
- 1 . 5
- 2 '- 4 0 0 0 - 3 5 0 0 - 3 0 0 0 - 2 5 0 0 - 2 0 0 0 - 1 5( X ) - 1 0 0 0 - 5 0 0 5 0 0R t m l Ax i s
F igure 5. Root locus d iagram of the spool subsystem and the pi lot /chamber differential pressure subsys tem a s/ 2 increases from 0 ~ ~ ,and K I = 1 in Fig. 3.
x 10 ROOt Ocue e t the h l t cnnectk~ I~ tvv~ I~1~ and cu ~ 'On t~ I ~auure / IpOeti ' ' '
i i . ~ 0 - : ; ii i i i ? i i
K1.1 : ; ;i i
: : i i i :. . . . . 1
_ r ~ ~ ~ ~ ' ~ . . ~Op~oppo~--o
: i i ii i i i i-1 : : : : :. .:
K 1 =1 : :
- 1 . s i i . . . . i : i: i i " - i i i-'~ ~ . . . . . . ~o do '1 4 00 - 1 200 - 1 000 - 8 0O - 8 00 - 4 00 - 200 600Rea l Axis
F igure 6 . Par t ia l root locus diagram of outer loop wi th inner loop beingthe spool chamber system with K2 = 1 as K] increases from 0 --> oo.Two other poles on the far left are not included,
K l = K 2 = 1 . To u n d e r s t a n d t h e e f f e c t o f t h e in t e r c o n n e c t i o n ,w e a p p l y E v a n ' s r o o t l o c u s t e c h n i q u e [ 2 ] t o i n v e s ti g a t e h o w t h ec l o s e d l o o p e i g e n v a lu e s m i g r a t e a s t h e p a r a m e t e r s in t h e s y s t e ma r e v a r i e d . C o n s i d e r f ir s t t h e i n n e r l o o p in F i g . 3 w h i c h i s t h ei n t e r c o n n e c t i o n b e t w e e n t h e p i l o t a n d t h e d i f f e r e n t i a l p r e s s u r es u b s y s t e m s . F i g . 4 s h o w s t h e l o c i o f t h e c l o s e d l o o p p o l e s o ft h e i n n e r l o o p a s t h e f i c ti t i o u s g a i n K l i s v a r i e d f r o m 0 ~ o o.K 1 = 1 c o r r e s p o n d s t o t h e g a i n i n t h e a c t u a l l o o p i n t h e p r e s e n tv a l v e d e si g n . F i g u r e 5 s h o w s t h e l o c u s o f t h e c l o s e d l o o p p o l e so f t h e o u t e r l o o p s y s t e m i n F i g u r e 3 a s t h e f i c t i ti o u s g a i n K 2 i si n c r e a s e d . Th e s e t o f p o l e s a t K2 = 1 a r e t h e a c t u a l p o l e s i n t h ev a l v e . A s e x p e c t e d , w h e n K 2 = 1 , t h e d o m i n a n t p o l e i s a t p =- 1 3 7 .2 r ad /s ( w h i c h i s th e r e a s o n w h y t h e d y n a m i c p e r f o r m a n c ei s l im i t e d ) . N o t i c e t h a t t h e r e a l p a r t s o f a l l t h e o t h e r e i g e n v a l u el o c a t i o n s a r e s i g n i f i c a n t l y m o r e n e g a t i v e .
F i g u r e 5 s h o w s t h a t f o r t h e p r e s e n t v a l v e d e s i g n ( i. e . K 2 ~ 1 ) ,t h e p o l e l o c a t io n s a r e w e l l a p p r o x i m a t e d b y t h e a s y m p t o t i c b e -h a v i o r s o f th e r o o t l o c u s . T h e s e a r e g o v e r n e d b y t h e " o p e n l o o p "p o l e a n d z e r o c o n f i g u r a ti o n s . I n p a r t ic u l a r , th e d o m i n a n t p o l e a tp = - 1 3 7 .2 i s b e i n g a t tr a c t e d t o t h e " z e r o " a t 0 . Tw o o t h e r p o l e sa r e c l o s e t o t h e z e r o s a t t h e p i l o t ' s o p e n l o o p p o l e l o c a t i o n s . T h er e m a i n i n g t w o p o l e s a r e a l s o c l o s e t o t h e a s y m p t o t e s . S i n c e th ed a m p i n g i n t h e s p o o l s c a n o n l y a f f e c t t h e a s y m p t o t e s s l ig h tl y,c o n t r a r y t o o u r i n i t ia l s p e c u l a t i o n , t h e n e g l i g i b l e d a m p i n g o f t h es p o o l d o e s n o t c o n t r i b u t e s i g n i fi c a n tl y t o t h e r e l a t i v e l y p o o r d y -n a m i c p e r f o r m a n c e o f t h e v a l v e . R a t h e r, t h e r e a s o n i s d u e t o t h e" z e r o " a t th e o r i g in . T h i s " z e r o " i s p r e s e n t b e c a u s e t h e s p o o ls u b s y s t e m i n t e r a c ts w i t h t h e c h a m b e r p r e s su r e d y n a m i c s v i a ~ .A s f a r a s t h e l o o p g a i n s K I a n d K 2 a r e c o n c e r n e d , f r o m F i g . 5 ,d e c r e a s i n g / ( 2 d e l a y s t h e m i g r a t i o n o f t h e d o m i n a n t p o l e to t h e
z e r o a t t h e o r i g in . S i m i l a r l y , i f w e h a d i n t e rc o n n e c t e d t h e d i f f e r -e n t i a l p r e s s u r e a n d t h e s p o o l ( l o w e r l o o p ) f i r st b e f o r e c o n n e c t i n gt h e p i l o t s y s t e m i n F i g . 3 a n d d e r i v e d t h e c o r r e s p o n d i n g r o o t l o c i,t h e n w e w o u l d h a v e n o t i c e d t h a t b y i n c r e a s i n g K l i n F i g . 3 , th ep a r t ia l r o o t l o c u s i s s h o w n i n F ig . 6 . N o t i c e t h a t t h e d o m i n a n tp o l e m i g r a t e s f r o m a n o p e n l o o p p o l e n e a r t h e o r i g i n to w a r d s t h el e f t h a l f p l a n e a s K t i n c r e a s e s .
3 . 2 R e d u c e d o r d e r r o o t l o c u sT h e r o o t l o c u s a n a l y s i s a b o v e i n d i c a t e th a t t h e f o u r c o m p l e x
p o l e s o f t h e v a l v e d e si g n c a n b e a p p r o x i m a t e d b y t h e i r a s y m p -t o t ic b e h a v i o r s . I n a d d i t io n , t h e c o m p l e x p o l e s o r i g i n a t e f r o m t h ep o l e s a s s o c i a t e d w i t h t h e p i l o t a n d th e s p o o l s u b s y s t e m s . T h i ss u g g e s ts t h a t w e m a y a p p r o x i m a t e th e b e h a v i o r o f t h e d o m i n a n te i g e n v a l u e o f t h e v a l v e b y c o n s i d e r i n g t h e p i l o t a n d t h e s p o o ls y s t e m s a s q u a s i - s ta t i c s y s t e m s , i .e . b y a s s u m i n g t h a t a t e a c h i n -s t a n t , t h e s p o o l s a n d t h e f l a p p e r a r e i n s ta t i c e q u i l i b r i a w i t h t h ei n s t a n t a n e o u s d i f f e r e n t i a l p r e s s u r e . Th e re s u l t i n g c o n f i g u r a t i o ni s g i v e n i n F i g . 7 . I n d e e d , t h e c l o s e d l o o p p o l e o f t h e r e d u c e do r d e r q u a s i - s t a ti c s y s t e m in F i g . 7 is p = - t 2 7 . 7 r a d / s w h i c h isv e r y c l o s e to t h e a c t u a l d o m i n a n t p o l e ( - 1 3 7 . 2 r a d / s ) . T h e c h a r -a c t e r i s t i c e q u a t i o n f o r t h e s y s t e m i n F i g . 7 i s g i v e n b y :
2 r r p ) - v 2 K s + r / s = 0 . (12)V s
5 C o p y r i g h t 2 0 01 b y A S M E
-
8/13/2019 Servo Valve Analysis
6/8
r
I -Simplified sl~ol/pilot sys tem
Figure 7. Blockdiagram with the p ilot and the spoolsubsystemsapprox-imated by their static systems.
pole location
Z e r o a t / 4_ ~ + 2 - ~ p2AsGs
Figure 8. Root locus of the reduced order model in Fig.7.
T h e r o o t l o c u s f o r p o s i t i v e v~ i s g i v e n i n F i g . 8 w h i c h s h o w s t h a tt h e p e r f o r m a n c e o f th e s y s t e m w o u l d b e l im i t e d b y a " z e r o " a t
a + 2 7 A n + B I t, 2 K : - c s ) (13)I n t h e c u r r e n t v a l v e d e s ig n , t h e " z e r o " o f t h e q u a s i - s ta t i c m o d e li s a t - 1 2 9 . 3 r a d / s . S i n c e t h e p o l e ( o f t h e q u a s i - s t a t i c m o d e l ) i sa l r e a d y a t - 1 2 7 .7 r a d / s , t h e p e r f o r m a n c e c a n n o t b e s i g n i f i c a n t l yi m p r o v e d b y i n c r e a s i n g 1 3 /I S' w h i c h i s t h e r a t i o b e t w e e n t h e f l ui dc o m p r e s s i b i l i t y a n d t h e c h a m b e r v o l u m e . A l t h o u g h t h e p r e s e n c eo f f i ni te p r e s s u r e c h a m b e r d y n a m i c s i s e s s e n t i a l f o r t h e e x i s te n c eo f t h e s l o w v a l v e d y n a m i c s , t h e v a l u e s o f th e c h a m b e r v o l u m e ,t h e c o m p r e s s i b i l i t y , o r c a p a c i t a n c e ( i .e . ~ ' / 1 3 ) d o n o t m a t t e r s i g -n i fi c a nt ly . R a t h e r , t h e p e r f o r m a n c e l i m i t a t i o n is d e t e r m i n e d b yt h e f e e d b a c k s t r u c t u r e i t s e l f .
T h e p e r f o r m a n c e l im i t a t i o n c a n b e a l l e v i a te d i f th e " z e r o "i n (1 3 ) c a n b e m o v e d f u r t h e r t o t h e l e ft . Co n s i s t e n t w i t h t h ep r e v i o u s a n a l y s i s , t h is c a n b e a c h i e v e d b y i n c r e a s in g t h e p i l o tl o o p g a i n a n d b y d e c r e a s i n g t h e s p o o l l o o p g a i n ( i .e . K l a n d K 2r e s p e c t i v e l y in F i g . 3 ) .
4 Dynamic Redesign4.1 Dynamic per formance
Since the dominant pole of the system limits the perfor-mance o f t h e v a l v e , i t m u s t b e m o v e d f u r th e r t o t h e l e f t h a l fp l a n e to i m p r o v e d y n a m i c p e r f o r m a n c e . A c c o r d i n g t o t h e r o o tl o c u s a n a l y s i s i n S e c t i o n 3 . 1 , t h i s c a n b e a c h i e v e d i f t h e l o o pg a i n i n t h e u p p e r l o o p i s in c r e a s e d , a n d t h e l o o p g a i n i n t h e l o w e rl o o p i s d e c re a s e d . F r o m t h e r e d u c e d o r d e r r o o t l o c u s a n a ly s i s
i n S e c t io n 3 . 2 , p e r f o r m a n c e i s l im i t e d b y t h e o p e n l o o p z e r o o ft h e r e d u c e d o r d e r s y s te m . S i n c e t h e d o m i n a n t p o l e l o c a t io n o ft h e v a l v e w i l l b e c l o s e t o t h e " z e r o " l o c a t i o n , th e " z e r o " l o c a -t i o n m u s t b e m o v e d t o t h e l e f t i f th e d y n a m i c p e r f o r m a n c e is t oi m p r o v e .
T h e e x p r e s s i o n f o r t h i s b l o c k i n g " z e r o " i s:
~ + 2 # p2AsGs ' ( 1 4 )
w h e r e G p : = ~ a n d G s : = z a rp 2Ks+Kfs are r e s p e c t i v e l y t h e s t e a d ys t a te r a t i o o f t h e f l a p p e r d i s p l a c e m e n t x f t o t h e d i f f e r e n t i a l p r e s -s u r e A P , a n d s t e a d y s t a t e ra t i o b e t w e e n t h e t o t a l s p o o l d is p l a c e -m e n t - Z a n d A P . T h e r e f o r e , f r o m (1 4 ), t h e k e y d e s ig n p a r a m e -t e r s in t h e v a r i o u s s u b s y s t e m s a r e :
Nozzle-flapper: T h e a p p a r e n t n o z z le a r e a A n + B , w h i c h c a nb e m o d i f i e d b y c h a n g i n g t h e p h y s i c a l s i z e o f t h e n o z z l e a n dt h e g a p b e t w e e n n o z z l e - f l a p p e r . 7 i s t h e s e n s it i v it y o f t h en o z z l e f l o w t o f l a p p e r d i s p l a c e m e n t w h i c h c a n a l s o b e m o d -i f ie d b y c h a n g i n g t h e n o z z l e d i a m e t e r . T h e a p p a r e n t f l a p p e rs t i ff n e s s K p i s a f f e c t e d b y t h e m e c h a n i c a l s t i f f ne s s , t h e n e g a -t i v e m a g n e t i c s t i ff n e s s a n d t h e n e g a t i v e n o z z l e f l o w i n d u c e ds t i f fness .Boost stage spools: T h e s p o o l a r e a A s , a n d t h e c e n t e r in g s p r i n gs t i f f n e s s Ks .
P r e s s u r e C h a m b e r s : a , w h i c h i s t h e co n v e r g e nc e r a te o f t h ed i f f e re n t i a l p r e s s u r e n o r m a l i z e d b y t h e i n v e r s e c h a m b e r c a -p a c i t a n c e , ~ / V ' .S h i f t in g t h e " z e r o " i n ( 1 4 ) t o t h e l e f t c a n b e a c h i e v e d b y 1 )
m o d i f y i n g t h e f l a p p e r n o z z l e d e s i g n s o a s t o i n c r e a s e "yG , ( i n-c r e a s e A n + B , d e c r e a s e K v , i n c r e a s e 7 ); 2 ) m o d i f y i n g t h e b o o s ts t a g e s p o o l d e s i g n s o a s t o d e c r e a s e A s G s ( d e c r e a s e A s , i n c r e a s eK s ); o r 3 ) b y m o d i f y i n g t h e o p e n l o o p c o n v e r g e n c e r a t e o f th ep r e s s u re c h a m b e r d y n a m i c s s o a s t o i n c r e a se a .
4.2 Stead y State Cri ter iaI n a d d i t i o n to t h e i r e f f e c t s o n t h e d y n a m i c r e s p o n s e o f t h e
v a l v e , i t is i m p o r t a n t a l s o t o e v a l u a t e t h e e f f e c t s o f t h e s e d e s i g np a r a m e t e r s o n t h e o p e r a t i n g p r e s s u r e a n d m o t i o n r a n g e s , a n du l t i m a t e l y t h e fl o w g a i n o f t h e v a l v e . W e d e t e r m i n e t h e s e f r o mt h e D . C . c o m p o n e n t s o f t h e t r a n s f e r f u n c t io n s a s s u m i n g 2 ) '/ i x i sl a r g e .Differential p ressure gain:
A P(s ) s=O : ( 2 T / a ) G P G Gl( s) I + (2 T /a )G p An +--'~B ~' - An +----B6 C o p y r i g h t 2 0 01 b y A S M E
-
8/13/2019 Servo Valve Analysis
7/8
Flapper displacement gain:xy(S) s= ( a ) A P ( s ) a Gl ( s ) = - - ~ - ~ ' ~ - s=O ~ 2 T A n + B
Spool displacem ent gain:
Z ( s ) s = 0 A P ( s ) s = 0 s] ( s ) = - G s ~ ~ A n + BFlow gain:
o L ( s ) ,= 0 Cdw Z ( s ) , = 0 C d w G G ,l ( s ) = 2 V f 7 ~ ~ 2 V - f f A - -- ~ Bw h e r e G = ~ / f o r t h e t o r q u e m o t o r , P s i s t h e s u p p l y p r e s s u r e f o rt h e b o o s t s t a g e . F o r a g i v e n i n p u t c u r r e n t , i t i s g e n e r a l l y p r e f e r -a b l e t h a t A P a n d x f b e s m a l l , a n d t h e f l o w Q L b e l a r g e. B e c a u s et h e p i l o t s u p p l y p r e s s u r e Psp i s l i m i t e d , l a r g e A P e x c u r s i o n r e -d u c e s t h e o p e r a t i n g r a n g e . O n t h e o t h e r h a n d , l a r g e x y g e n e r a l l yr e q u i r e s l a rg e m a g n e t i c a i r g a p , w h i c h c a n c o m p l i c a t e t h e d e s ig no f t h e t o r q u e m o t o r . A l a r g e f lo w g a i n i s d e s i r a b l e s o t h a t a s m a l li n p u t c u r r e n t c a n b e u s e d t o c o n t r o l l a r g e f l o w s .
T h e c o n s e q u e n c e s o n t h e s e c r it e r i a w h e n t h e v a r i o u s p a r a m -e t e r s a re u s e d t o i m p r o v e t h e d y n a m i c s p e r f o r m a n c e a r e s u m -m a r i z e d i n F i g u r e 9 . I f t h e a p p a r e n t n o z z l e a r e a A n + B i s i n -c r e a s e d , f o r t h e s a m e i n p u t c u r r e n t , t h e d i f f e r e n t i a l p r e s s u r e a n dt h e s t e a d y s t a t e f l a p p e r d i s p l a c e m e n t w i l l b e d e c r e a s e d . U n f o r t u -n a t e ly , s i n c e t h e f l o w g a i n h a s a l s o b e e n p r o p o r t i o n a t e l y re d u c e d ,m o r e f o r c e is r e q u i re d f r o m t h e t o r q u e m o t o r t o a c h i e v e t h e s a m ef l ow . S i m i l a r l y , d e c r e a s i n g G s o f t h e s p o o l s y s t e m w i l l d e c r e a s et h e f l o w g a i n s i g n i fi c a n t l y . I n c r e a s i n g (x w i l l h a v e t h e a d v e r s ee f f e c t o f in c r e a s in g f l a p p e r m o t i o n . T h e d e s i g n p a r a m e t e r s t h a tdo n o t a d v e r s e l y a f f e c t t h e s t e a d y s t a t e c r i t e r i a s i g n i f i c a n t l y a r et h e a p p a r e n t f l a p p e r s ti f f n e s s K p , t h e s p o o l a r e a As, ( w h i l e m a i n -t a i n i n g G s c o n s t a n t ) a n d T o f t h e n o z z l e - f l a p p e r .
O f t h e s e t h r e e p a r a m e t e r s , i n f a c t o n l y K p a n d A s c a n b e u s e di n d e p e n d e n t ly t o i m p r o v e d y n a m i c p e r f o r m a n c e w i t h o u t a f f e c t-i n g t h e s t e a d y s t a t e p e r f o r m a n c e . T , w h i c h i s t h e s e n s i t i v i t y o ft h e c h a m b e r f l o w t o f l a p p e r d i s p l a c e m e n t , c a n n o t b e v a r i e d t oa n y s i g n i f ic a n t d e g r e e w i t h o u t a f f e c t i n g t h e a p p a r e n t n o z z l e a r e aAn + B. I n d e e d , e v e n a 5 % i n c r e a s e i n ~ / n e c e s s i t a t e s a n i n c r e a s ei n t h e a c t u a l n o z z l e a r e a A n b y o v e r 1 4 0 % T h i s c a n p o t e n t i a ll yi n c r e a se t h e a p p a r e n t n o z z l e a r e a A n + B w h i c h i n t u r n d e c r e a s e st h e s t e a d y s t a t e f l o w g a i n .4 . 3 Red u c i n g th e S p oo l A r ea A s
A c c o r d i n g t o t h e e x p r e s s i o n o f t h e " z e r o " i n ( 1 4) , i f s p o o la r e a A s i s r e d u c e d b y 5 0 % a n d G s i s m a i n t a i n e d c o n s t a n t , t h e
K p . [. ( A n + B ) ~ f T f G s . l . A s . l. a Ta t ~ /x : x
Q L X XFigure 9. Conseq ue nces on the static criteria when various design pa-rameters ar e u sed to improve the dyna mic performance. Direction of thearrow indicates the direction of proposed change. X represents signifi-cant degradation, ~/ represents some improvement. For each column,the variables in all other column s are assu med to be constant.
b a n d w i d t h o f th e s y s t e m s h o u l d d o u b l e a n d t h e f lo w g a i n s h o u l dr e m a i n t h e s a m e . I g n o r i n g K f s ( s p r i n g c o n s t a n t d u e t o s t e a d ys t a t e f l o w f o r c e ) i n Gs, Ks i s h a l v e d . F i g u r e 1 0 a ) s h o w s t h a t t h er i se t i m e o f t h e m o d i f i e d 2 0 m A s t e p r e s p o n se h a s b e e n r e d u c e df r o m 8 . 2 m s t o 4 . 2 m s . T h e q u a s i - s t a t ic f l o w - c u r r e n t r e l a ti o n s h i pi n F i g . 1 0 b ) , g e n e r a t e d u s i n g a 5 H z s i n u s o i d a l c u r r e n t i n p u t ,s h o w s t h a t t h e f l o w - g a i n o f t h e m o d i f i e d v a l v e i s o n l y s l ig h t l ys m a l l e r t h a n in t h e o r ig i n a l d e s i g n . T h e s m a l l d e c r e a s e is d u et o t h e f a c t t h a t G s i s n o t e x a c t l y k e p t c o n s t a n t b y i g n o r i ng K f s .T h e m o d i f i e d v a l v e a l so s h o w s a d e c r e a s e d h y s t e r e s i s, w h i c h i sc o n s i s t e n t w i t h i m p r o v e d d y n a m i c r e s p o n s e .
4 . 4 R e d u c i n g t h e f l a p p e r s t i ff n e s s KpKp is the apparent flapper stiffness given by:~gK p = K p - 1 6 n C ~ x o P - ~x y x /=0 , i=0"
I t c a n b e r e d u c e d b y r e d u c i n g t h e m e c h a n i c a l s t i f fn e s s K p o r b yi n c r e a s in g t h e n o z z l e f l a p p e r g a p X f o , o r b y i n c r e a s i n g th e m a g -n i t u d e o f t h e n e g a t i v e s ti f f n e ss d u e t o t h e p e r m a n e n t m a g n e t i nt h e t o r q u e m o t o r . W e c o n s i d e r r e d u c i n g t h e m e c h a n i c a l s t i ff n e s sKp --+ 0 . 7 5 R p s o t h a t K p i s r e d u c e d t o 5 4 % o f t h e o r i g i n a l v a lu e .T h e l o c at io n o f t h e " z e r o " i s e x p e c t e d t o m i g r a t e f r o m - 1 2 9 . 3r a d / s t o - 2 2 2 . 3 r a d / s . F i g u r e 1 1 s h o w s t h a t t h e 6 4 % r i s e t i m eh a s i n d e e d b e e n r e d u c e d f r o m 8 . 2 m s t o 4 . 9 m s .
5 D i s c u s s i o nT h e o r i g i n a l d e s i g n p h i l o s o p h y o f t h e t w o s p o o l f l o w c o n -
t r o l s e r v o - v a l v e u s i ng a p r e s s u r e c o n t r o l p i l o t i s t h a t t h e p i l o ts t a g e f i r s t e s t a b l i s h e s a d i f f e r e n t i a l p r e s s u r e , w h i c h i n t u r n p o s i -t i o n s t h e t w o b o o s t s t a g e s p o o l s a c c o r d i n g t o t h e s t i ff n e s s o f t h ec e n t e r i n g s p ri n g . T h i s a s s u m e s t h a t t h e p i l o t s ta g e a n d t h e b o o s ts p o o l s t a g e a r e i n a c a s c a d e c o n f i g u r a t i o n . I n t h e a c t u a l c o n f i g -u r a t i o n ( F i g . 3 ) , th e p i l o t s t a g e a n d t h e b o o s t s t a g e a r e i n f a c t i na c l o s e d l o o p c o n f i g u r a ti o n . A s t h e d i f f e r e nt i a l p r e s s u r e m o v e st h e s p o o l s , t h e d i f f e r e n ti a l p r e s s u r e i t s e l f i s c h a n g e d . T h i s u p s e t s
7 C o p y r i g h t 2 0 01 b y A S M E
-
8/13/2019 Servo Valve Analysis
8/8
F - - - - - - r - - ~ . . . . . . .. . i . . . . . . .. . i . . . .. . . .. i . . . .. . . . . : . . . . . . . . = = = , , .I i i t . . . .-0.0~ i i l i ...... i ........ : ....... ......... :........ ....... i ...... i ......
: : i \~ \ s / i ~ : ' ~ / i i : : :i i \ , ( i i i ::/ :--. .__~_ :
i i i ' i - - . . . . . . . . . . . . . . . . . . . . . . . . . .- 30 0.0l 0. (~ 0.03 0.04 0.05 0.00 0.07 0.0e 0.09 0.1"nine - sCurmnt Ilow relaUonshdpswhe~ A= a halved
Figure 10. Step response (left) and current-f low relat ionship of the valvemodifiedby As ~ As /2 , Ks +- Ks /2 .
i j , ,
: i i ~ i i : :. . . . . . . . . . . . . . . . . i i . . . . . . . . . . . . . i . . . . . . . . i . . . . . . . . i . . . . . . . . . i . . . . . . . . ~ . . . . . . . . i . . . . . . . .
i i i i : ii i i : : i i . . . . . ~ . . . . . . . . . . . . . . .
i i i i i i i i. . . . . . . . ~............ i , i i i i i
: . . . . . _ . . . . _ . . . . _ . . . . . . . . . . . . . . . . . . . . .i i i i0.01 o,G2 0.03 0.04 0.06 0 .00 0.07 0.00 o.o9 0,1T ime - s e e
Figure 11. Ste p response of the va lve modified by K p