Servo ServoBot is a robot that cleans a thing using Servo Motor.
20
Servo Servo ServoBot is a robot that cleans a thing using Servo Motor.
-
Upload
elfrieda-lynch -
Category
Documents
-
view
222 -
download
1
Transcript of Servo ServoBot is a robot that cleans a thing using Servo Motor.

ServoServo
ServoBot is a robot that cleans a thing using Servo Motor.

AssemblingAssembling
1. Fix DC Motor and Motor Frame using only bolts.

AssemblingAssembling
2. Put Motor Frame that is fixed to DC Motor to Main Frame and fix using only bolts.

AssemblingAssembling
3. Insert bolt to Main Frame, fix with nut and cap nut then insert wheels to DC Motor

AssemblingAssembling
4. Fix 35mm Support to Main Frame with bolts.

AssemblingAssembling
5. Insert Servo Motor to 35mm Support and fix with nuts.
AssemblingAssembling
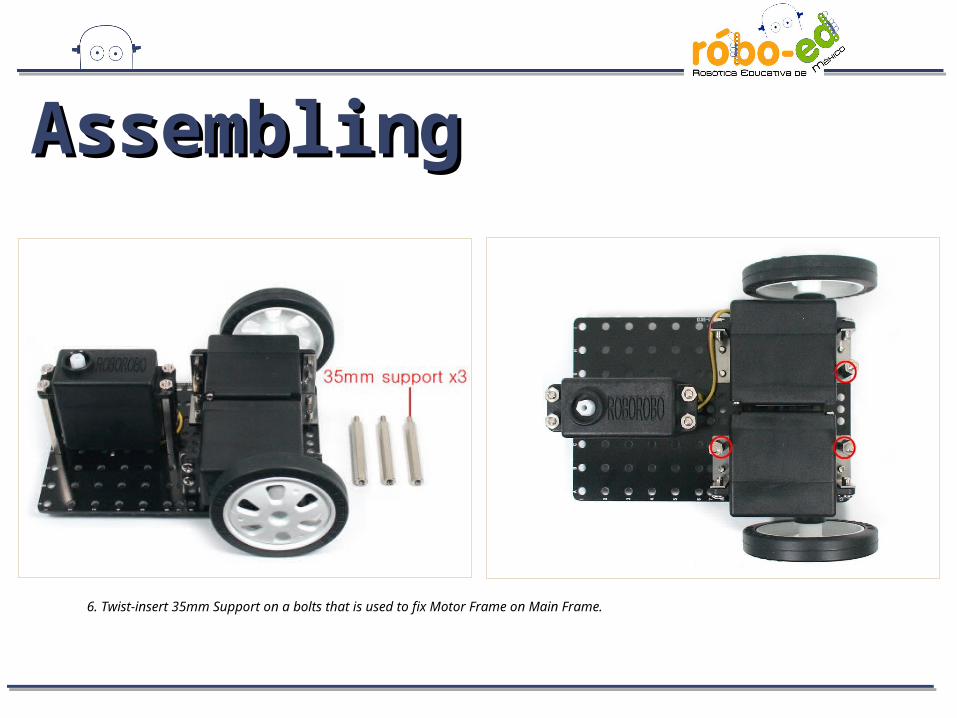
6. Twist-insert 35mm Support on a bolts that is used to fix Motor Frame on Main Frame.

AssemblingAssembling
7. Connect Battery Case and CPU Board with L-type 2x2 Frame.

AssemblingAssembling
8. Insert CPU Board to Support that is fixed to Main Frame then fix with 20mm Support and a nut.
AssemblingAssembling
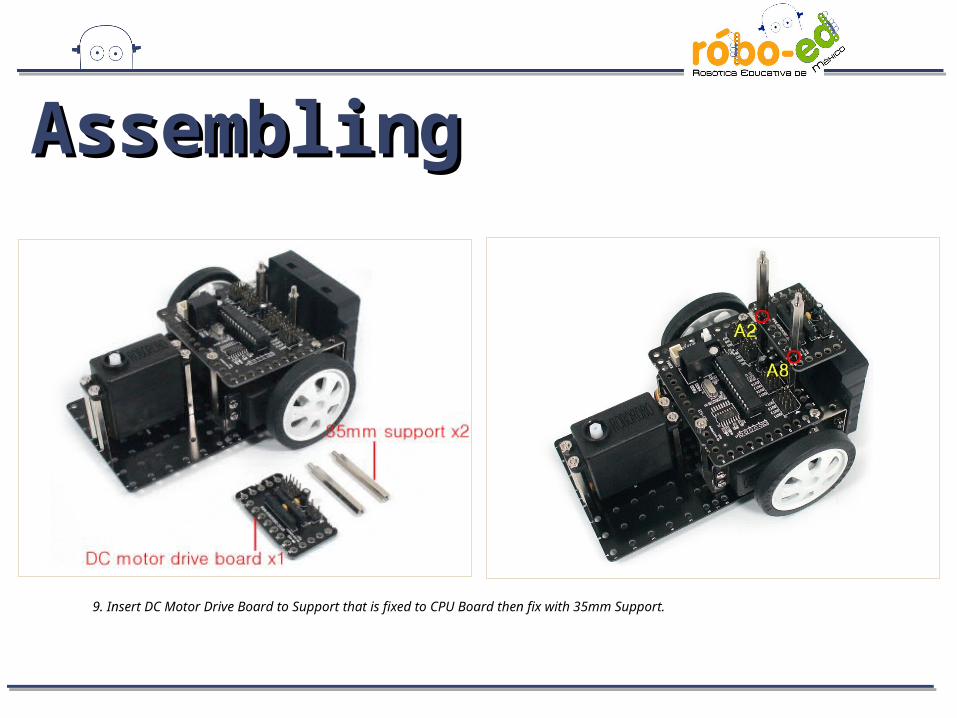
9. Insert DC Motor Drive Board to Support that is fixed to CPU Board then fix with 35mm Support.

AssemblingAssembling
10. Connect Remocon Receiving Board and Buzzer Board with L-type 2x1 Frame.

AssemblingAssembling
11. Insert Remocon Receiving Board to Support that is fixed to DC Motor Drive Board then fix with nuts.

AssemblingAssembling
12. Fix Small 8 Frame and Small 5 Frame to Middle Frame with bolts and nuts and make shape of a hand.

AssemblingAssembling
13. Connect 2 Small 8 Frames with L-type 2x1 Frame then fix Motor Guide to Small 8 Frame.
AssemblingAssembling
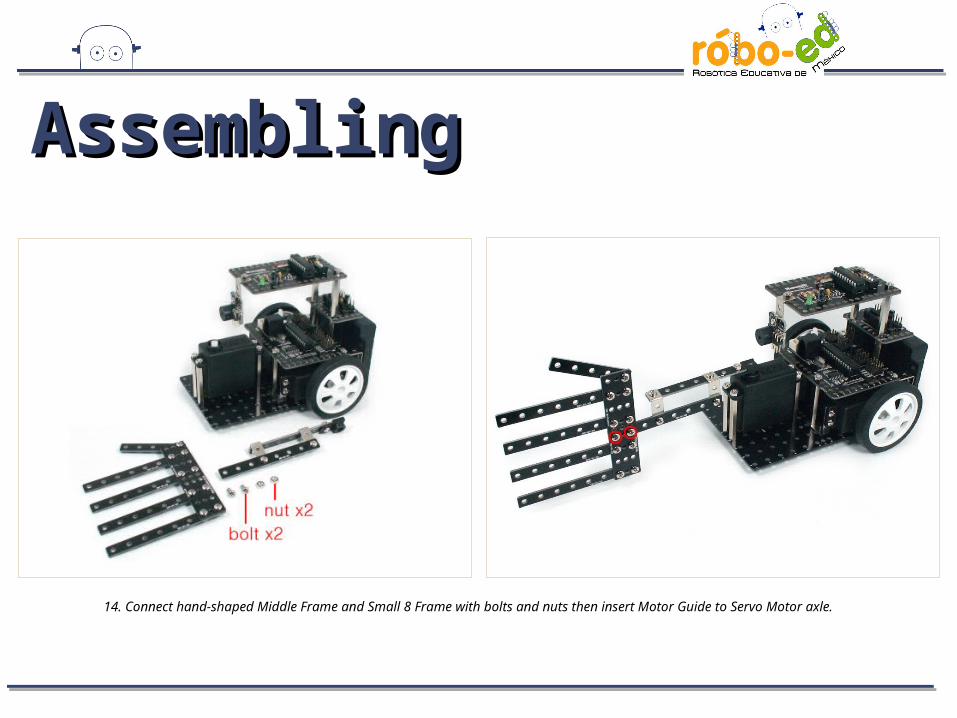
14. Connect hand-shaped Middle Frame and Small 8 Frame with bolts and nuts then insert Motor Guide to Servo Motor axle.

AssemblingAssembling
15. Connect Power Cable of Battery Case to Power Connector of CPU Board. Connect DC Motor cable to A, B of DC Motor Drive Board.

AssemblingAssembling
16. Connect 3 Pin Cable to OUT Port 1, 2, 3, 4 of CPU Board and 1, 2, 3, 4 of DC Motor Drive Board.
Connect Servo Motor Cable to OUT Port 5 of CPU Board.
AssemblingAssembling
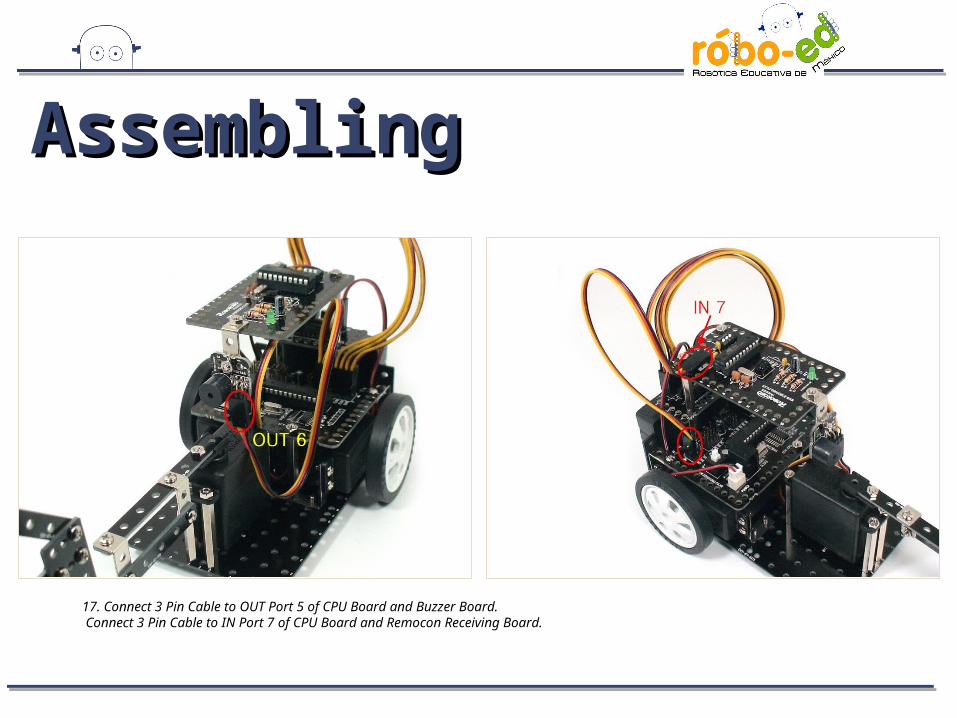
17. Connect 3 Pin Cable to OUT Port 5 of CPU Board and Buzzer Board. Connect 3 Pin Cable to IN Port 7 of CPU Board and Remocon Receiving Board.

AssemblingAssembling
18. Completed ServoBot.

Set starting point of servo Set starting point of servo motormotor
Setting Position of Starting Point Radius of Rotation