Sequenal decisions under uncertainty
24
Sequen&al decisions under uncertainty KTH/EES PhD course Lecture 7
Transcript of Sequenal decisions under uncertainty

Sequen&al decisions under uncertainty
KTH/EES PhD course Lecture 7

Lecture 7
• MDP: extensions – POMDP
– Limit theorems
• Mul&‐armed bandit problems – Introduc&on – Lower regret bound

POMDP
Present state Next state Ac&on
Reward
• Set of states: • Set of ac&ons available in state s: • These sets are finite, countably infinite, or compacts subsets
of a Euclidian space (finite dimension)
• Time horizon
S
As, A = ∪s∈SAs

Observa&ons
Present state Next state Ac&on
Reward
• The state is not fully observable • Observa&on at &me t: • Observa&on probabili&es:
Ot
o(a, s, z) = P [Ot = z|Xt = s, Yt−1 = a]
Decision rules, policies • HR:
• Main issue: Markovian policies have poor performance
• Op&mal policies are history‐based!
π = (π1, . . . ,πN−1)
qπt(ht)(a) : probability to select ac&on a
πt : (Z ×A)t−1 × Z → P(A)

Informa&on states • An informa&on state is a distribu&on on the state space: it is
our belief for the state distribu&on, given the history
• Bayesian approach. Upda&ng belief distribu&on: – At &me t: belief b
– At &me t+1, given that ac&on a was chosen, and observa&on z has just been made,
• Markovian structure recovered (MDP)
baz(s′) =
o(a, s′, z)∑
s p(s′|s, a)b(s)∑
s,s′′ o(a, s′′, z)p(s′′|s, a)b(s)
More on POMDP • Read Anthony Cassandra’s thesis: “Exact and Approximate Algorithms for POMDP”

Limit theorems • Read Kushner Dupuis book: “Numerical methods for stochas&c control problems in con&nuous &me”
• … or Kushner’s paper (same &tle), SIAM J. Control and Op&miza&on, 1990
An example
• Finite &me horizon (N steps), and finite “budget” B
• Reward: • Goal: max expected reward • Value func&on:
• Scaling budget and &me‐horizon:
b(t+ 1) = b(t)− c(a(t), ξ(t))
r(a(t), ξ(t))
b(0) = B
v(b, t) = supu
E[t−1∑
i=0
r(u(i), ξ(i))]
Vβ(B, T ) = βv(B/β, t/β)
β → 0

An example
• Result: exists and solves V (B, T ) = limβ→0
Vβ(B, T )
V (B, T ) = supu
∫ τ∧T
0r̄(u(t))dt
τ = inf{t ≥ 0 : B(t) = 0}
dB
dT= −c̄(u(t))
r̄(a) = Eξ[r(u, ξ(0)], c̄(a) = Eξ[c(u, ξ(0)]

Mul&‐Armed Bandit (MAB)
MAB problem
• Known parameters: number K of arms (or decisions), &me horizon (or number of rounds) T
• Unknown parameters: how rewards are generated
reward of pulling arm j at &me t
• Objec&ve: maximize the total expected reward at &me T
Xj,t :

Stochas&c vs. Adversarial
• Stochas&c: rewards sampled from an unknown distribu&on – Example: IID case,
• Adversarial sedng: rewards chosen by an adversary ‐ Oblivious adversary:
‐ Adap&ve adversary: rewards depend on the history (selected arms so far)
(Xj,t, t = 1, 2, ...) µjIID random variables with mean
(Xj,t, t = 1, 2, ...) chosen ini&ally (at &me 0)
Applica&ons
• Clinical trials (Thompson 1933)
• Ads placement on webpages • Rou&ng problems
• …

Outline of the next lectures
• Asympto&cally op&mal policies for IID MAB + UCB policies
• Finite‐&me analysis of IID MAB • Large number of arms
– Unstructured rewards – Structured rewards
• Adversarial MAB
Stochas&c MAB
• Robbins 1952 • IID rewards
• At a given &me, an arm is selected and the corresponding random reward is observed
• Best arm: • Under a given policy, the arm selected at &me t is
Expected regret:
(Xj,t, t = 1, 2, ...) µjIID random variables with mean
j! = argmaxj
µj
j(t)
R(t) = t× µj! −t∑
n=1
µj(t)

Parametric model
• Measure on
• Reward distribu&ons parametrized by • Configura&on: • Arm j reward distribu&on:
• Kullback‐Leibler divergence:
R : ν
θ ∈ RC = (θ1, . . . , θK)
Xj,t ∼ f(x, θj)dν(x)∫|x|f(x, θj)dν(x) < ∞
∫xf(x, θj)dν(x) = µ(θj)
I(θ,λ) =
∫log
[f(x, θ)
f(x,λ)
]f(x, θ)dν(x)
Assump&ons
• strictly increasing • con&nuous in
• Finally:
• Nota&on: permuta&on
µ(θ)
θ != λ =⇒ I(θ,λ) > 0
I(θ,λ) λ
∀λ,∀δ, ∃λ′ :
µ(λ) < µ(λ′) < µ(λ) + δ
σ
µ(θσ(1)) ≥ . . . ≥ µ(θσ(K))
µ(θσ(1)) = µ(θσ(l)) > µ(θσ(l+1))

Example: Bernoulli rewards
• Rewards take values in {0,1} • Measure : • We have:
ν
θ ∈ [0, 1]
ν = δ0 + δ1
µ(θ) = θ
I(θ,λ) = θ log
[θ
λ
]+ (1− θ) log
[1− θ
1− λ
]
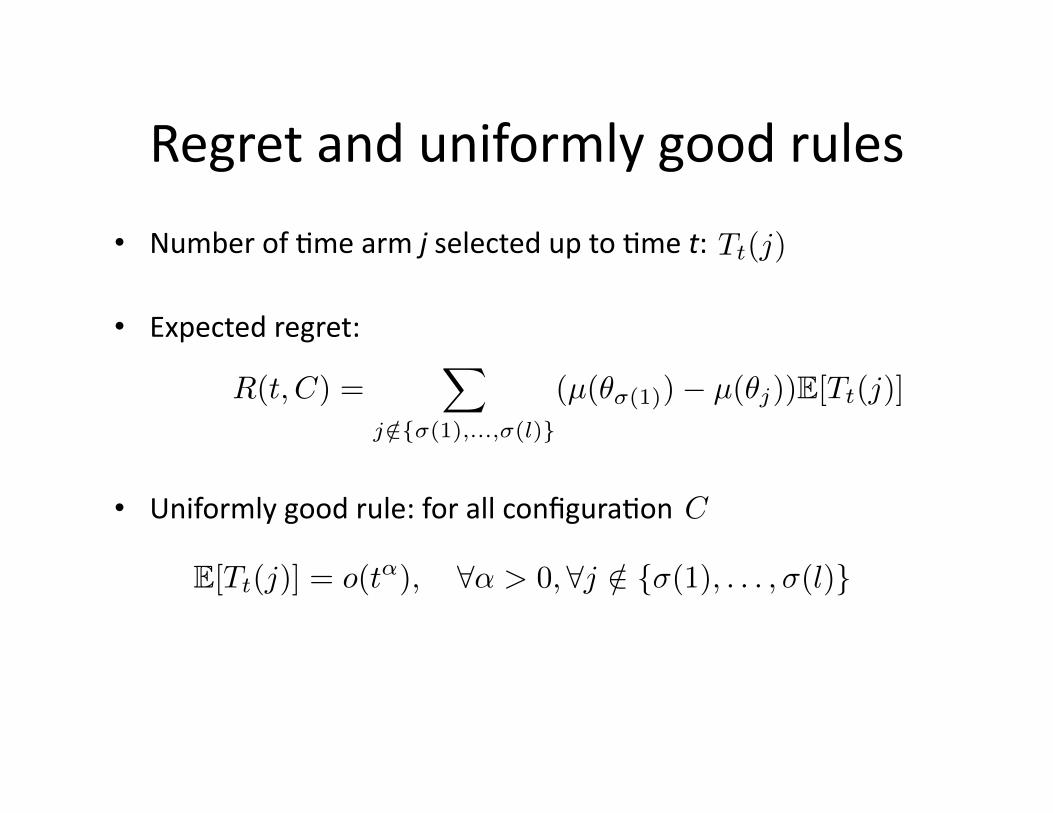
Regret and uniformly good rules
• Number of &me arm j selected up to &me t:
• Expected regret:
• Uniformly good rule: for all configura&on
Tt(j)
R(t, C) =∑
j /∈{σ(1),...,σ(l)}
(µ(θσ(1))− µ(θj))E[Tt(j)]
C
E[Tt(j)] = o(tα), ∀α > 0, ∀j /∈ {σ(1), . . . ,σ(l)}

Lower bound on regret Lai and Robbins 1985
Theorem Consider any uniformly good rule.
Configura&on:
Hence:
C = (θ1, . . . , θK)
∀ε > 0, ∀j /∈ {σ(1), . . . ,σ(l)},
limt→∞
PC
[Tt(j) ≥
(1− ε) log t
I(θj , θσ(1))
]= 1.
lim inft→∞
R(t, C)
log(t)≥
∑
j /∈{σ(1),...,σ(l)}
µ(θσ(1))− µ(θj)
I(θj , θσ(1)).

Universality of the bound
• Similar bound can be derived for controlled Markov chains, i.e., for parametrized average reward MDP
• Graves‐Lai 1996. Asympto&cally efficient adap&ve choice of control laws in controlled Markov chains.
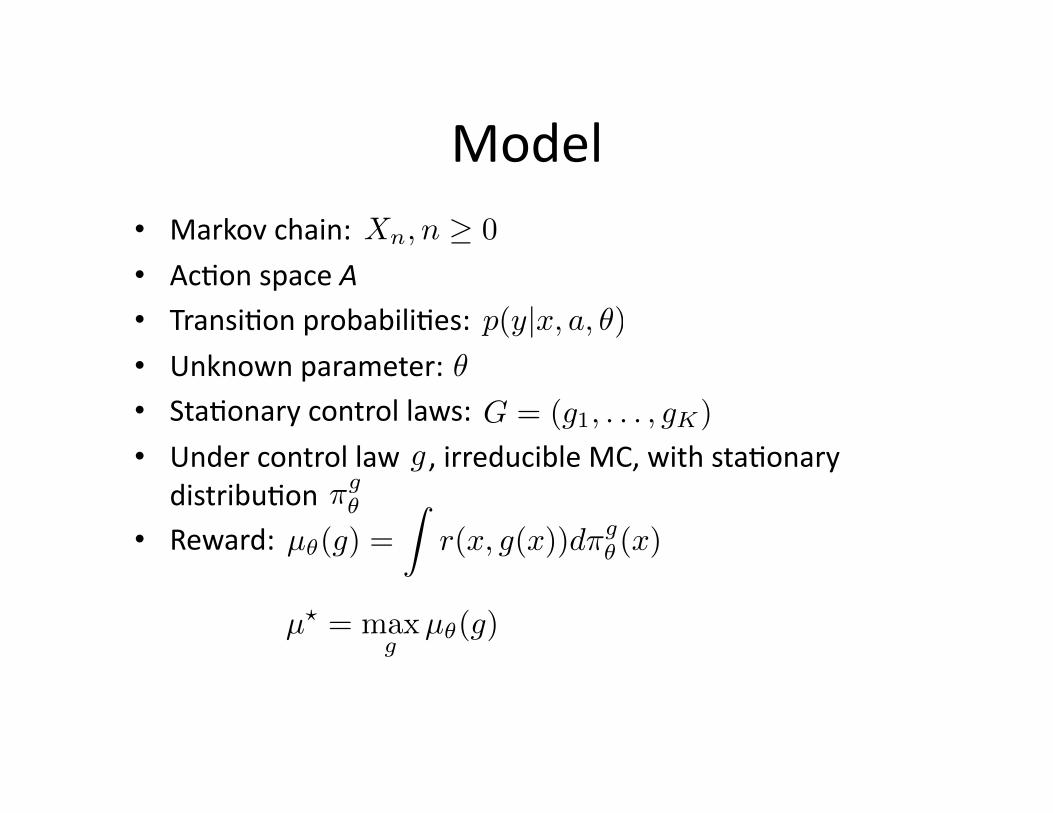
Model • Markov chain:
• Ac&on space A • Transi&on probabili&es: • Unknown parameter: • Sta&onary control laws: • Under control law , irreducible MC, with sta&onary
distribu&on • Reward:
Xn, n ≥ 0
p(y|x, a, θ)θ
G = (g1, . . . , gK)
gπgθ
µθ(g) =
∫r(x, g(x))dπg
θ (x)
µ! = maxg
µθ(g)
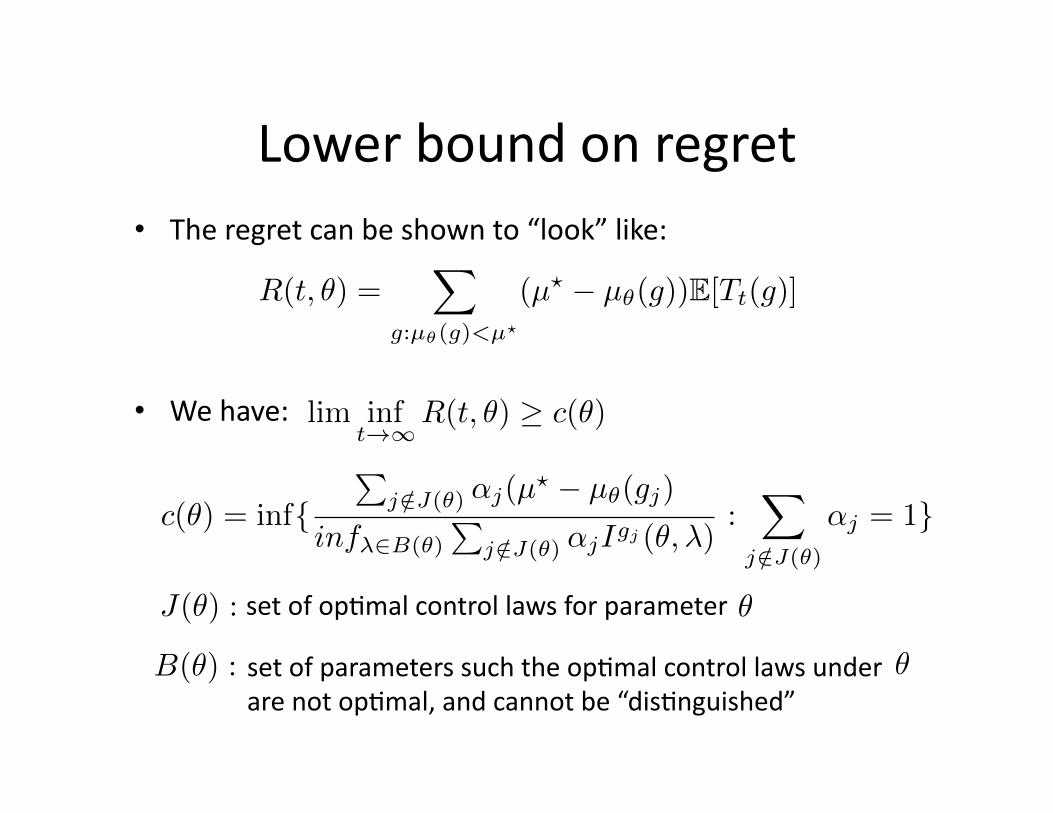
Lower bound on regret • The regret can be shown to “look” like:
• We have:
R(t, θ) =∑
g:µθ(g)<µ"
(µ! − µθ(g))E[Tt(g)]
lim inft→∞
R(t, θ) ≥ c(θ)
c(θ) = inf{∑
j /∈J(θ) αj(µ" − µθ(gj)
infλ∈B(θ)
∑j /∈J(θ) αjIgj (θ,λ)
:∑
j /∈J(θ)
αj = 1}
J(θ) :
B(θ) :
set of op&mal control laws for parameter θ
set of parameters such the op&mal control laws under are not op&mal, and cannot be “dis&nguished”
θ