
Self-* Programming: Run-Time Parallel Control Search for Reflection Box
23
Self-* Programming: Run-Time Parallel Control Search for Reflection Box Olga Brukman and Shlomi Dolev Ben-Gurion University of the Negev Israel
description
Self-* Programming: Run-Time Parallel Control Search for Reflection Box. Olga Brukman and Shlomi Dolev Ben-Gurion University of the Negev Israel. Problem. Ideally Systems should anticipate every possible scenario Reality Engineers fail to create such systems despite the effort - PowerPoint PPT Presentation
Transcript of Self-* Programming: Run-Time Parallel Control Search for Reflection Box

Self-* Programming:
Run-Time Parallel Control Search for Reflection Box
Olga Brukman and Shlomi DolevBen-Gurion University of the Negev
Israel
Problem
• Ideally– Systems should anticipate every possible scenario
• Reality– Engineers fail to create such systems despite the
effort– The number of possibilities of different
interactions with dynamic environment is enormous
– Relying on accumulated knowledge of human operator to deal with unexpected situations
2

Example 1
• Airplane flying into ash cloud– Engines stopped– Pilots managed to fly the plane out of the cloud,
waited till the engines cooled down, and were able to restart them
3
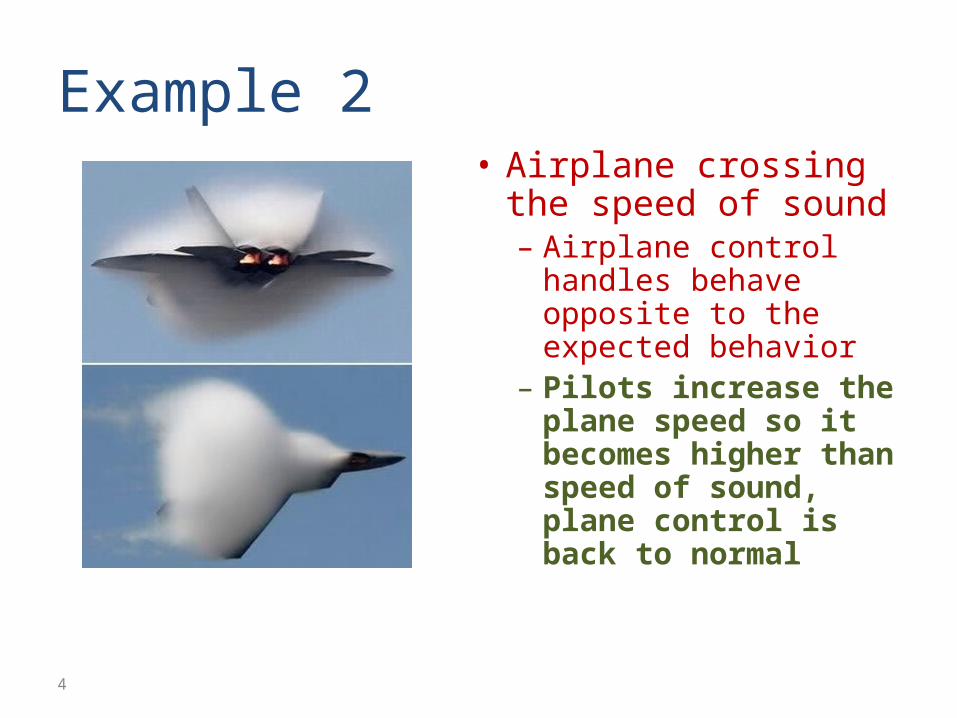
Example 2• Airplane crossing the
speed of sound – Airplane control handles
behave opposite to the expected behavior
– Pilots increase the plane speed so it becomes higher than speed of sound, plane control is back to normal
4

Our Contribution: Automatic Control Search Engine for Dynamic Environment
• No assumptions on possible environment changes• Experimentation on replicas• Parallelization of experiments• Polynomial search time – Parallelization– Exposing system state
• Observing system state (e.g., with Java reflection)• Setting system state to a certain state
5

System Settings: Environment
EnvironmentNon-deterministic infinite automaton
t
EnvironmentDA/PA(F1)
EnvironmentDA/PA(F2)
EnvironmentDA/PA(F3)
t
• Environment is large, sophisticated, dynamic– Non deterministic infinite automaton• At every given time slot environment is • deterministic automaton • probabilistic automaton with a transition function Fi
6

System Settings: Environment vs. Plant
• Our program (control) interacts with some machinery in environment– plant
SystemEnvironment
Controlin1,.., ink
out1, …,outlPlantPlant
Environment
in’1…...., in’m
out’1,……,out’n
7
System Settings: Environment and Plant
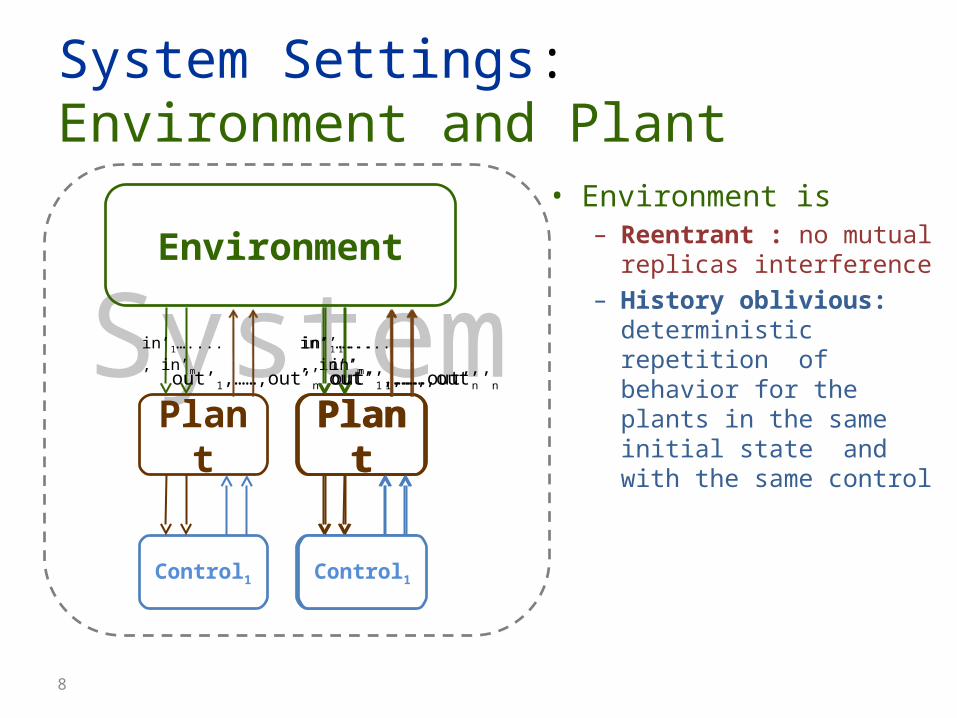
• Environment is– Reentrant : no mutual
replicas interference– History oblivious:
deterministic repetition of behavior for the plants in the same initial state and with the same control
SystemEnvironment
Control1
Plant
in’1…...., in’m
out’1,……,out’n
Control2
Plant
in’’1…...., in’’m
out’’1,……,out’’n
Control1
Plant
in’1…...., in’m
out’1,……,out’n
8
SystemControl Plant
Environment
in’1…...., in’m
out’1,……,out’n
in1,.., ink
out1, …,outl
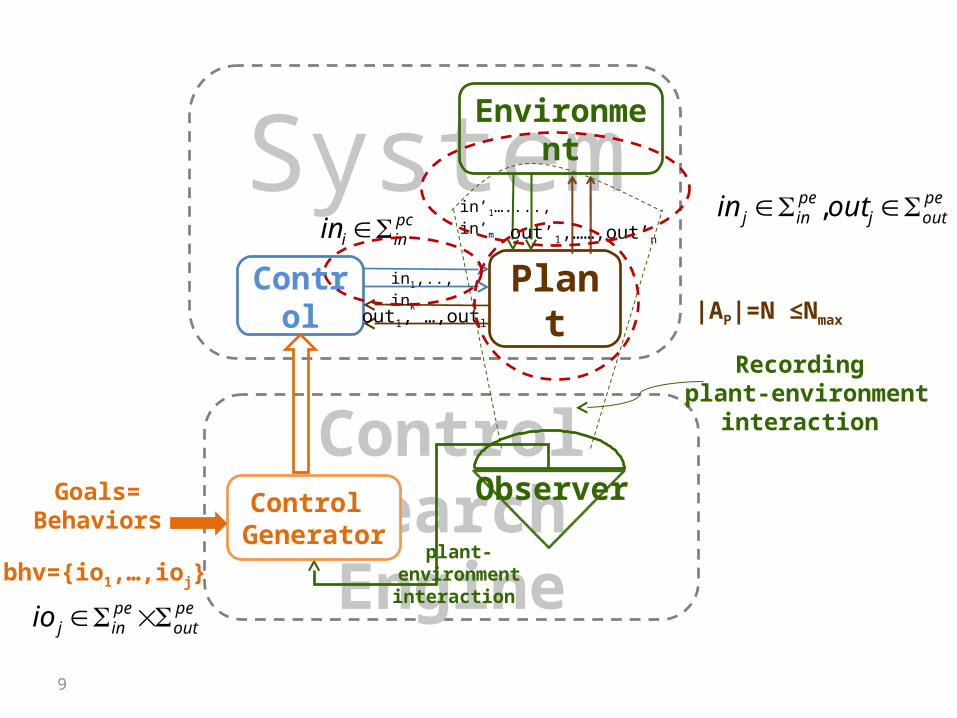
Control Search Engine
Observer
plant-environmentinteraction
Control Generator
Goals=Behaviors
bhv={io1,…,ioj}peout
peinjio
peoutj
peinj outin ,pc
iniin
|AP|=N ≤Nmax
Recording plant-environment
interaction
9

Settings: Periodic Control
Plant automaton
+
=
in1
in4
in3
in2
io1
io2
io3
io4
P=3
peout
pein
10
bhv={io2, io3 , io4}, io2, io3 , io4
C={in1(in2, in3, in4)*}
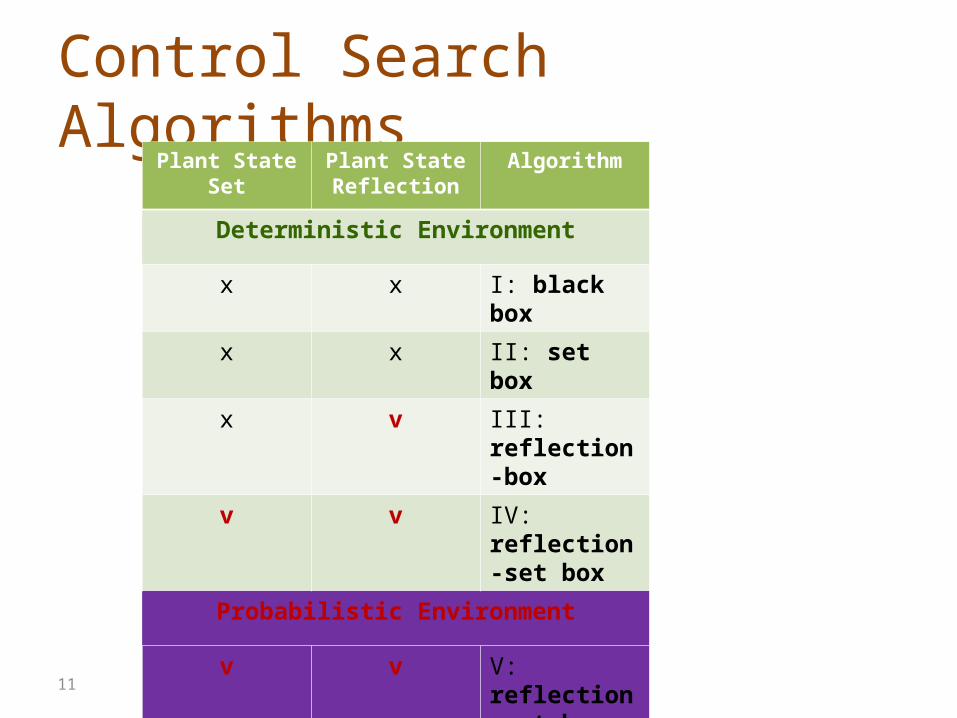
Control Search AlgorithmsAlgorithmPlant State
ReflectionPlant State Set
Deterministic Environment
I: black boxxx
II: set boxxx
III: reflection-box
vx
IV: reflection-set box
vv
Probabilistic Environment
V: reflection-set box
vv
VI: set boxvx11
Control Search Algorithms for
Deterministic Environment
12

Algorithm I: black-box
• Complexity– Total number steps in experiments:– Longest experiment: O(PNmax)
s
s
s
s
…
C1
C2
CM
)||( 1max
max PNpcinPNO
scurr
x P∙
scurr sP_1 sP_2 sP_N_max+1…
0<i≤Nmax P
P(Nmax +1)
sP_3
P
max
1
||N
i
Pipcin
)1(
max
max
)(
0,)(
Nsuffixprefixj
Ppcinsuffix
ipcinprefix
CCC
C
NiC
13
sstart

Algorithm IV: reflection-set box
|| pcin
s1sN….
σ1 σ2
σΣ... σ1 σ2
σΣ...
|| pcin Ap
• Off line search of the constructed plant automaton• Try all controls from every state
• Complexity• Total number of steps in experiments:• Longest experiment: O(1)
1])[( NPpcin
|)|( pcinNO
14
Control Search Algorithms for
Probabilistic Environment

Probabilistic Environment
• Plant is unaware of the entire state of the environment– Environment can be considered to be probabilistic
automaton – Plant transition function is probabilistic
• Control search algorithm executes all the time– Due to probabilistic transition function of plant automaton
• Monitoring– Recognize changes in the plant probabilistic transition
function
16
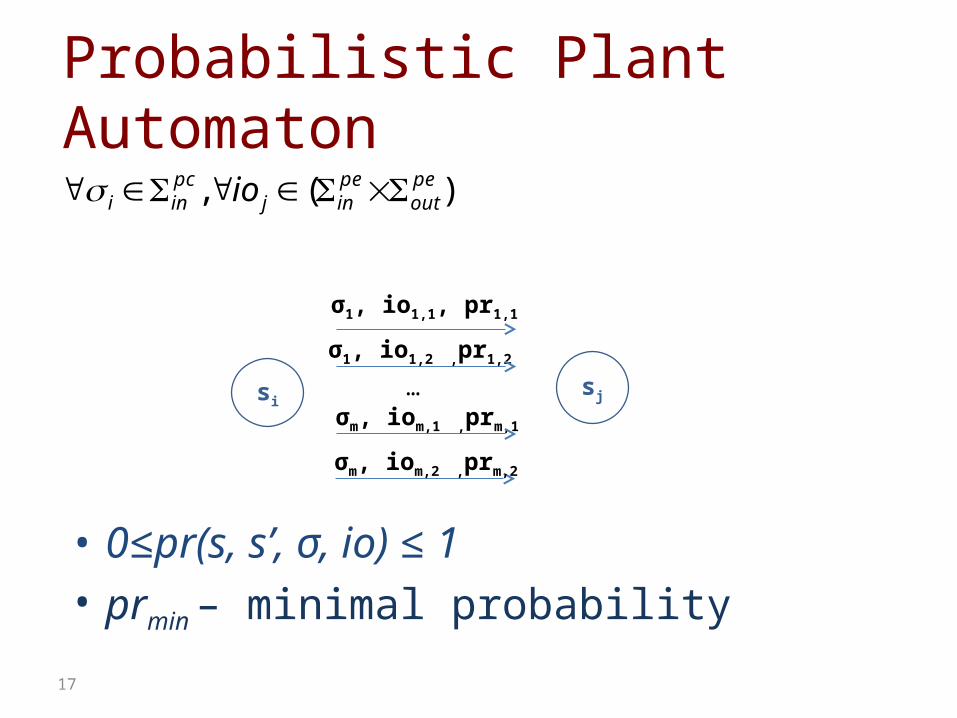
Probabilistic Plant Automaton
• 0≤pr(s, s’, σ, io) ≤ 1• prmin – minimal probability
sisj
)(, peout
peinj
pcini io
17
σ1, io1,1, pr1,1
σ1, io1,2 ,pr1,2 …
σm, iom,1 ,prm,1
σm, iom,2 ,prm,2

Computing Probabilistic Plant Automata Graph (PPAG)
si
SF times
σ
:,, peout
pein
pcinPji ioSss σ, ios1s2…si-1si+1…sN
s10.020.08…0.060.05…0.25
s20.040.07…0.60.02…0.2
…
sN0.50.01…0.020.1…0.4
PPAG[si,sj,σ,io]=pr
SF=1-(1/prmin): number of experiments required to discover the edges with the smallest probability
sj?io?
18
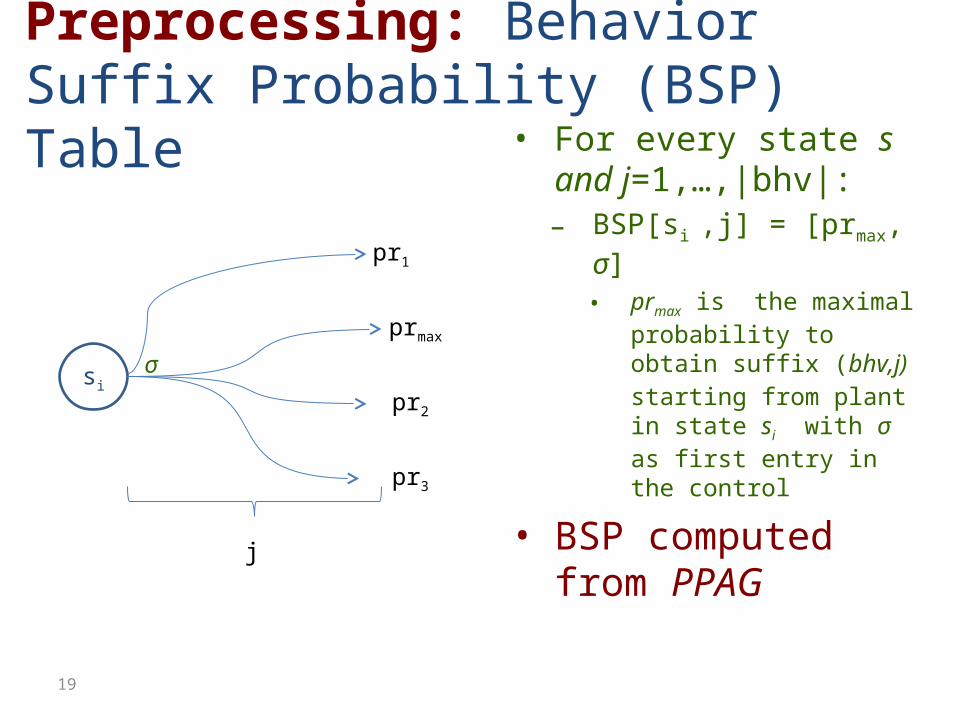
Preprocessing: Behavior Suffix Probability (BSP) Table • For every state s and
j=1,…,|bhv|:– BSP[si ,j] = [prmax, σ]
• prmax is the maximal probability to obtain suffix (bhv,j) starting from plant in state si with σ as first entry in the control
• BSP computed from PPAG
siσ
j
prmax
pr2
pr1
pr3
19

Preprocessing: Behavior Suffix Probability (BSP) Table Cont.• Base step: for every si compute BSP[si,1]
– For every si find input σ that produces bhv[k] with the highest probability : max{PPAG[si, *, σ,bhv[k]]}
pr1σ1 (io1)
si
1
prmax
pr2
pr3
σ (bhv[k])
σ2 (io2)
σ3(io3)

Preprocessing: Behavior Suffix Probability (BSP) Table Cont.• Assume we computed all entries BSP[si ,j] for every si and j≤m
• BSP[si , (m+1)]?– Let σ be the one that yields the largest value of
• Σs_j (PPAG[si,sj, σ,bhv[k-m]] BSP[s,m].pr)∙– BSP[si, m+1]=[Σs_j (PPAG[si,s, σ,bhv[k-m]] BSP[s,m].pr), ∙ σ]
σ1 (bhv[k-m])
si
1
pr3= Σs_j (PPAG[si,sj,σ3,bhv[k-m]].pr BSP[s∙ j,m].pr)
σ (bhv[k-m])
σ2 (bhv[k-m])
σ3 (bhv[k-m])s,s’,s’’,…
s,s’,s’’,..
s,s’,s’’,..
s,s’,s’’,
prmax=Σs_j (PPAG[si,sj, σ,bhv[k-m]] BSP[s∙ j ,m].pr)
pr2= Σs_j (PPAG[si,sj,σ2,bhv[k-m]].pr BSP[s∙ j,m].pr)
pr1= Σs_j (PPAG[si,sj,σ1,bhv[k-m]].pr BSP[s∙ j,m].pr)
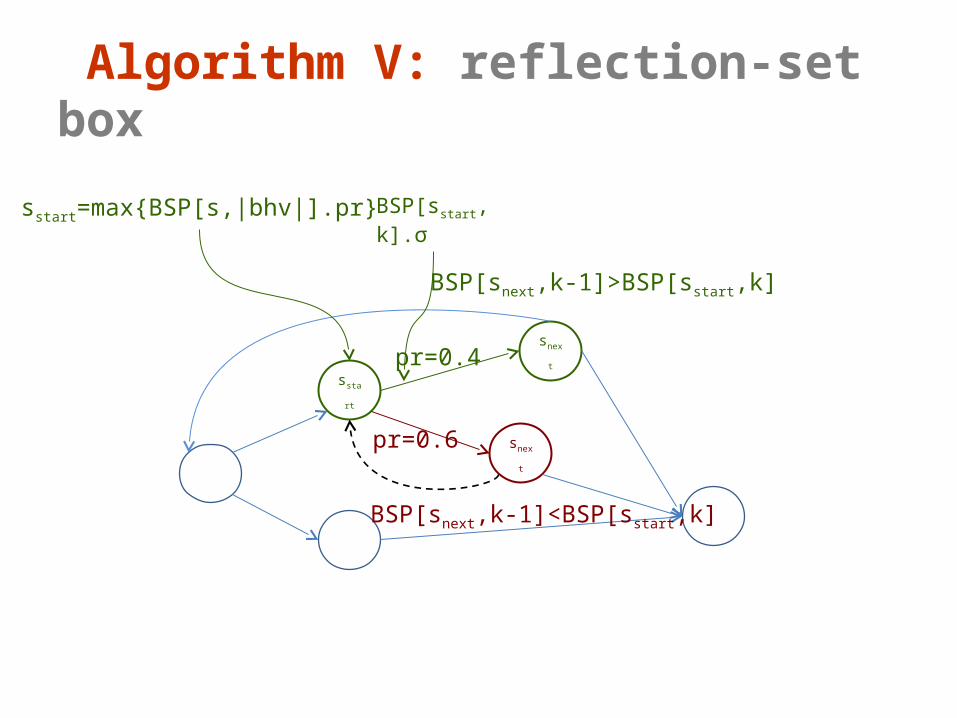
Algorithm V: reflection-set box
sstart
snext
snext
sstart=max{BSP[s,|bhv|].pr}
BSP[snext,k-1]>BSP[sstart,k]
BSP[sstart,k].σ
pr=0.4
pr=0.6
BSP[snext,k-1]<BSP[sstart,k]

Algorithm VI: set box
sstart
BSP[snext,k-1]>BSP[sstart,k]
BSP[sstart,k].σ
S’best=max{BSP[s,k].pr}
sbest=max{BSP[s,k].pr}
sbest
snext
snext
23
pr=0.7
pr=0.3
BSP[snext,k-1]<BSP[sstart,k]


















