
Self-Organizing Wireless Sensor Networks For Inter-Vehicle
64
Technical Report, IDE0635, March 2006 Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication Master’s Thesis in Computer Systems Engineering Submitted by Zeeshan Iqbal School of Information Science, Computer and Electrical Engineering Halmstad University
Transcript of Self-Organizing Wireless Sensor Networks For Inter-Vehicle

Technical Report, IDE0635, March 2006
Self-Organizing Wireless Sensor Networks
For Inter-Vehicle Communication
Master’s Thesis in Computer Systems Engineering
Submitted by
Zeeshan Iqbal
School of Information Science, Computer and Electrical Engineering Halmstad University


Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
Master’s thesis in Computer Systems Engineering
School of Information Science, Computer and Electrical Engineering Halmstad University
Box 823, S-301 18 Halmstad, Sweden
March 2006

Description of cover page picture: Collided-Vehicles sending emergency warning messages
to following vehicles to avoid multiple collisions.

In the name of the Lord, “ALLAH” whom is our God:


i
PREFACE This Master’s Thesis Project was held to fulfil the requirement of the Master’s of Science Degree in Computer Systems Engineering. This project was undertaken at CC-Lab at Halmstad University from September 2005 to March 2006. First of all, I would like to thank my supervisor Prof. Dr. Magnus Jonsson, Head of Computing and Communication Laboratory, for his worthy guidance, inspiration and motivation throughout the project. I think without his support and dedication it was not possible at all to do this work. I would also like to thank Prof. Dr. David Maltz at Microsoft for his advises, help and allow me to borrow some of his work for comparison. A special thank to Dr. Elisabeth Uhlemann at Volvo Technologies, Gothenburg and Hoai Hoang at Halmstad University. At the last but not the least, I would like to dedicate my work to my beloved family; my parents, brothers and sister for their love and always being near me even hundred of miles away. Zeeshan Iqbal Halmstad University, March 2006

ii

iii
ABSTRACT Now a day, one of the most attractive research topics in the area of Intelligent Traffic Control is Inter-vehicle communication (V2V communication). In V2V communication, a vehicle can communicate to its neighbouring vehicles even in the absence of a central Base Station. The concept of this direct communication is to send vehicle safety messages one-to-one or one-to-many vehicles via wireless connection. Such messages are usually short in length and have very short lifetime in which they must reach the destination. The Inter-vehicle communication system is an ad-hoc network with high mobility and changing number of nodes, where mobile nodes dynamically create temporary sensor networks and transferring messages from one network to others by using multiple hops due to limitation of short range. The goal of the project is to investigate some basic research questions in order to organize such sensor networks and at the same time highlight the appropriate routing protocol that support mobile ad hoc networks in an efficient and reliable manner. In our investigation, we have answered the technical issues in order to construct a V2V communication system. We have also studied some mobile ad hoc network routing protocols in detail and then selected the DSR (Dynamic Source Routing) for our V2V communication and then simulated it according to our system requirements. We are quite satisfied by the result of DSR, but at the same time much more work is required to come up with an absolute application for the end user.

iv
Table of Contents 1 INTRODUCTION .............................................................................................................................................. 1
1.1 IVC .................................................................................................................................................................. 1 1.2 PROJECT DESCRIPTION...................................................................................................................................... 2
2 BACKGROUND................................................................................................................................................. 5
2.1 GENERAL.......................................................................................................................................................... 5 2.2 RELATED WORK................................................................................................................................................ 5
3 PROJECT TASKS ............................................................................................................................................. 7
3.1 OVERVIEW ........................................................................................................................................................ 7 3.2 PHYSICAL MEDIUM FOR COMMUNICATION........................................................................................................ 7 3.3 MAC PROTOCOL & NETWORK PROTOCOL STACK............................................................................................... 7 3.4 HOW TO ORGANIZE AND MAINTAIN GROUPS..................................................................................................... 7 3.5 WHAT IS THE SIZE OF EACH GROUP.................................................................................................................... 8 3.6 ROUTING PROTOCOLS........................................................................................................................................ 8
4 DESIGN SPACE................................................................................................................................................. 9
4.1 TECHNICAL ISSUES............................................................................................................................................ 9 4.2 INTRODUCTION OF MANET PROTOCOLS........................................................................................................... 10 4.3 DISCUSSION ON ROUTING PROTOCOLS............................................................................................................. 10 4.3.1 POSITION BASED ROUTING PROTOCOLS......................................................................................................... 11 4.3.2 SPEED AND HEADING ESTIMATIONS USING GPS............................................................................................. 11 4.3.3 ROUTING PROTOCOLS FOR AD HOC NETWORKS............................................................................................. 12 4.3.3.1 DESTINATION SEQUENCED DISTANCE VECTOR (DSDV) .............................................................................. 12 4.3.3.2 TEMPORALLY ORDERED ROUTING ALGORITHM (TORA) ............................................................................ 12 4.3.3.3 DYNAMIC SOURCE ROUTING (DSR) ............................................................................................................ 13 4.3.3.4 AD HOC ON-DEMAND DISTANCE VECTOR (AODV)...................................................................................... 13 4.3.4 PERFORMANCE COMPARISON OF ROUTING PROTOCOLS................................................................................. 13 4.3.4.1 COMPARISON (PACKET DELIVERY RATIO) .................................................................................................. 14 4.3.4.2 COMPARISON (ROUTING OVERHEAD.......................................................................................................... 15
5 A SELF-ORGANIZING CLUSTER............................................................................................................... 19
5.1 CLUSTER ORGANIZATION................................................................................................................................ 19 5.1.1 DISTANCE-BASED PERIODIC CLUSTERING..................................................................................................... 19 5.1.2 POSITION-BASED NEIGHBOURHOOD CLUSTERING......................................................................................... 20 5.1.3 ON-DEMAND CLUSTERING............................................................................................................................ 21 5.2 CLUSTER SIZE.................................................................................................................................................. 21 5.3 MESSAGE SIZE AND DIRECTION........................................................................................................................ 21 5.3.1 MESSAGE SIZE............................................................................................................................................... 21 5.3.2 MESSAGE DIRECTION.................................................................................................................................... 22 5.4 CLUSTER CONFIGURATION.............................................................................................................................. 22 5.4.1 SIMPLE AND STRAIGHTFORWARD CASE......................................................................................................... 23 5.4.2 A LITTLE-BIT CONFUSING SCENARIO............................................................................................................. 24 5.4.3 A COMPLETELY CONFUSING SCENARIO......................................................................................................... 25 5.4.4 WORST CASE SCENARIO................................................................................................................................ 26 5.5 SURVEY OF VCWC PROTOCOL.......................................................................................................................... 27

v
6 ANALYSIS AND SIMULATION OF DSR.................................................................................................... 31
6.1 ROUTING REQUIREMENTS FOR V2V COMMUNICATION ..................................................................................... 31 6.2 DSR STUDIES AGAINST V2V COMMUNICATION REQUIREMENTS....................................................................... 32 6.2.1 INTRODUCTION TO DSR................................................................................................................................. 32 6.2.2 PROTOCOL DESCRIPTION & FEATURES.......................................................................................................... 33 6.2.2.1 ROOT DISCOVERY...................................................................................................................................... 33 6.2.2.2 ROOT MAINTENANCE................................................................................................................................. 33 6.3 SIMULATION OF DSR....................................................................................................................................... 34 6.3.1 TECHNICAL ASSUMPTIONS........................................................................................................................... 34 6.3.2 ROAD TOPOLOGY......................................................................................................................................... 34 6.3.3 SIMULATION SCENARIOS.............................................................................................................................. 36 6.3.3.1 COMMUNICATION IN DIRECT VICINITY ....................................................................................................... 36 6.3.3.2 COMMUNICATION WITH NODES AT A DISTANCE OF 100 METERS................................................................ 38 6.3.3.3 COMMUNICATION WITH FAR AWAY NODES................................................................................................ 39 6.3.3.4 AN INTERESTING SCENARIO WITH CHANGING ROAD TOPOLOGY................................................................. 41
7 CONCLUSION ................................................................................................................................................. 43
8 FUTURE WORK.............................................................................................................................................. 45
APPENDIX A. SECURITY IN V2V COMMUNICATION................................................................................... 47
APPENDIX B. ASSUMPTIONS & LIMITATIONS .............................................................................................. 49
REFERENCES........................................................................................................................................................... 51


Introduction
1
Keywords
Intelligent Traffic Control (ITC) Inter-Vehicle Communication (IVC) SPF, DOVA, Path-Vector, DSRC DSR, VCWC protocol
1. Introduction 1.1 IVC
Now a day, one of the most attractive research topics in the area of Intelligent Traffic Control is Inter-vehicle communication. Furthermore it can be classified as Vehicle-infrastructure-vehicle communication, V2I and Vehicle-to-vehicle communication, V2V. In V2V communication, a vehicle can communicate to its neighbouring vehicles even in the absence of a central Base Station. The concept of this direct communication is to send vehicle safety messages one-to-one or one-to-many vehicles via wireless connection. Such messages are usually short in length and have very short lifetime in which they must reach at the destination. The Inter-vehicle communication system is an ad-hoc network with high mobility and changing number of nodes, where mobile nodes dynamically create temporary networks and transferring messages from one node to others by using multiple hops due to limitation of short range.
Though some research work has been done and some solutions have been proposed, still a lot of work is required in this area. There are projects going on for this kind of real-time communication in vehicles. Some are based on vehicle to Infra-structure (a communicating device installed at road side) communication and few of them are based on vehicle-to-vehicle communication, but this project is quite different from others in the sense of system parameters, network architecture and some limitations. We proposed Self-organized sensor network architecture rather than to consider Cell architecture or Ad-hoc networks as discussed in [1]. The main focus of the project is to avoid multiple collisions for road safety and security.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
2
1.2 Project Description
In order to guarantee the safety of the road, Inter-Vehicle Communication is one of the most important factors. In such communication, the nearby cars are communicating with each other directly or indirectly (multi-hop architecture) and send the important signals or messages about their actions. Such actions can be sudden and can cause disturbance or confusion that may lead to severe accidents.
There are certain actions causing confusions, like suddenly pressing the brakes or changing the lane without giving indicator. If this happens, then there are many chances of collisions of cars from behind to preceding cars. To prevent this kind of mishap, one approach is to inform other near by cars about the action and its direction. Our proposed solution provides the avoidance of such collisions to save human lives and expensive vehicles. In order to build such type of network (in which nodes are entering, moving and leaving at high speed), a special routing protocol is required; that is reliable, intelligent and fast enough to be able to find a path. The nodes in this network also act as routers to assist multi-hop communication. This could be done by letting the acting vehicle communicate with others behind it and sending some kind of information related to its action.

Introduction
3
Investigation for system parameters, like who have to communicate, when and what important messages to send.
Study of ad hoc routing protocols and further research on communication in such highly mobile networks are required
Figure 1.1 Avoiding multiple collisions by sending emergency warning messages
This information must have to reach at the destination before the deadline; the deadline here is the time to reach between the following car and the preceding car, and this time period depends on the distance and the speed (time= distance/speed). We know that on the motorway or highway, cars are running at high speed, may be 110 km/h, so this communication is highly time constraint dependent.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
4

Background
5
2. Background 2.1 General
The concept of Telematics (make advantage of combining Computer Systems and Communication Systems) was used in automobiles in the start of 90’s. The scientists initially addressed many types of applications which provide information to/from the vehicle. Such applications consist of simple information systems to advanced management information systems, MIS. By using those applications, drivers can exchange useful information like traffic situation at some specific time, have internet facility on board, can chat with each other, and can download data, songs and other interesting utilities. These applications may be used as monitoring the vehicles by their companies including taxis and buses [7].
In the mid of 90’s, this concept go beyond the basic utility applications and was addressed for vehicle and traffic safety issues. It is noticed that hundred of thousands people killed every year in road accidents even in the presence of sophisticated traffic rules and educated drivers. The injuries to the passengers and vehicle damages are extra loss adding to death tolls. These worthy lives can be saved by taking account of traffic safety messages through vehicle communication, like talking cars exchanging important and emergency messages regarding their intentions, changing positions and directions as well as accelerate/decelerate speed. If such messages reach to other near-by vehicles in time, then it is obvious to save accidents, harsh vehicle collisions and avoid multiple collisions by resending this information to the following traffic in multi-hops.
2.2 Related Work
The work most related to our work is summarized in [6], in which major technical challenges are addressed for communication protocols for inter-vehicle communication. They have designed an effective protocol, called VCWC protocol, to achieve low-latency, comprises of congestion control policies and methods for emergency message differentiation. They have evaluated the performance of their designed protocol.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
6
Another related work is [3], in which the wireless ad hoc routing protocols are defined and then their performance is compared. But our focus is to study such routing protocols those support high mobility of nodes (roughly we can say that nodes in our network are moving with 30 m/sec and the mobility assumed in [3] is 20 m/sec). We see that some proposed protocols fail at high mobility and especially when the network becomes congested.
A detailed survey of Inter-Vehicle Communication is given in [1] with much information on the whole scenario, but with the main focus on Physical and MAC layer protocols with detailed discussion from WLAN to 3G Cellular extensions to employ such system. The research paper [7] defines the general technical issues for vehicle control applications from vehicle communication point of view. These issues include the network configuration, group organization and communication protocols.
‘FleetNet’ [5] is an industrial project partly related to this work. The FleetNet project has different applications including vehicle communication by assisting the driver about some special emergency or in case of accidents and also introduction of Internet into moving cars. Main focus is on its air-interface, which includes the link of vehicles to other vehicles as well as to Internet via some gateway.

Project Tasks
7
3. Project Tasks 3.1 Overview
The project concerns evaluation of the performance needs on the wireless link between cars. The project task is to develop a self-organizing wireless sensor network and the main goal is to avoid multiple collisions of cars due to sudden actions performed by preceding cars.
In order to organize such real-time wireless communication system, many technical issues have to be taken under consideration, like the size of each group with in which nodes communicate, when to communicate and how to communicate, either multicast or broadcast.
Some basic research questions rise while organizing such network:
3.2 Physical medium of communication
Which Radio spectrum will be used for actual physical medium for such type of communication? Study of different technologies like Bluetooth or other wireless standards like IEEE 802.11, however this is not of primary focus.
3.3 MAC protocol and Network protocol Stack
To study such protocol supporting real-time and time constraint traffic, initially it is assumed that medium access control is through IEEE 802.11 or its modifications using Distributed Co-ordination Function, (DCF). Another solution is to use the extension of 3G technology with CDMA for decentralised [1].
3.4 How to organize and maintain groups
One of the interesting parts of the project is to study and analysis of organising the cars in a group to communicate. It is highly varied mobility system; nodes are entering, moving and leaving the groups at high speed so there may be a high message loss. The research question rise to how clock will synchronised in such a dynamic topology network.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
8
3.5 What is the size of each group
How many nodes can accommodate in each group? This depends on the bandwidth of the actual medium (range of frequency) and the congestion of network at some particular time. This number varies in different time intervals, for example; in rush hours traffic load is much higher than in other time of the day. So a flexible protocol is required to control such type of dynamic changes.
3.6 Routing Protocol
The most interesting issue is of routing, it defines how packets will be transmitted based on the deadlines specified with them and how the shortest paths for multi-hop communication are to be decided. There are different traffic classes to be sent, for example control and the real message data. So study different routing protocols that seems to be relative for such kind of communication, like shortest path first or path vector.
There are some additional research-questions that may rise during further studies
� Broadcasting, multicasting or any casting � What information to be sent (information about some action) � Order of communication (from preceding to following cars or logical ring) � Physical location of nodes by using GPS (already installed in most of the new models)

Design Space
9
4. Design Space 4.1 Technical Issues
In order to control V2V communication applications, there are many technical issues to be addressed. The reason for this addressing is that these types of communication networks are quite different from normal mobile ad hoc networks due to their high mobility and completely self organized nodes. V2V communication applications also varies a lot; these applications may be for driver’s assistance or may be just for driver’s recreation, some applications are used for vehicle monitoring (one of its example is to use GPS systems to locate the position of vehicles for monitoring purposes). The application on which we are going to work is to exchange the useful information for vehicle safety purposes by avoiding the single collision as well as multiple-collisions. Such applications are responsible for V2V safety messages and require the information of nearby vehicles as their position, speed, acceleration/deceleration and future intentions. Future intentions may consist of telling the future activities of that vehicle, which may be changing the lane or may be increasing the speed or going to stop the vehicle. One of the interesting issues is the selection of communication medium for this kind of communication. This primary selection is utmost to estimate the range of physical medium for group sizes and their organization to have a direct connection. Let say that the ideal range estimations for intra-group communication is 100 meters to 200 meters and the range for inter-group communication is about 1 km. The other issue in V2V communication is how to establish connections with in a group and then among the groups. The communication with in a group is obviously with direct connection because our group organization is based on the actual transmission range of the physical medium which means that nodes with in direct vicinity requires no multi-hops. In case of inter-group communication we require multi-hops to send the message to far away nodes, which is essential in V2V communication in order to avoid multiple collisions. So we require some efficient and reliable routing protocol that must support multi-hops in mobile ad hoc networks and also support high mobility and high data rate.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
10
In our further discussions, we have highlighted some of the mobile ad hoc network (MANET) protocols and their results to come to decision of employ one of the best routing protocols for V2V communication systems.
4.2 Introduction of MANET Protocols In this section, we discuss some of the classes of routing protocols for mobile ad hoc networks because our intention is to select a suitable routing protocol for V2V communications and then study its features in detail and try to accommodate it in V2V communication as it is or with some modifications. There are some MANET protocols classified as flat routing, Hierarchical routing and Graphical position based routing [8]. The flat routing, in which all nodes have same and equal responsibilities in routing, seems quite interesting to investigate in it. On the other hand the Hierarchical routing is something opposite of flat routing; all nodes have different responsibilities in the network. This type of routing is not ideal for our requirements; in our network all the nodes act as routers to support multi-hops. The third class is Graphical position based routing, based on GPS/DGPS to estimate the position of the node and then routing the data on the basis of that position, may be of our concern because we are also interested in position based routing. The flat routing is further classified as Proactive and Reactive [8]. Proactive routing protocols are table driven protocols in which the routing activities and routing information are almost permanent. However the reactive protocols are on-demand protocols, only search the new routes and update those routes when require by the network, result in reducing the routing overhead. These on-demand protocols are ideal for ad hoc networks with high mobility; examples of reactive protocols are DSDV, TORA, AODV and DSR.
4.3 Discussion on Routing Protocols
To solve the tricky problem of sending real time messages within the time constraint and efficiently; we discuss some proposed solutions, their limitations and then we will also discuss some work that has been already done in this area.

Design Space
11
4.3.1 Position-Based Routing Protocol
For Inter-vehicle communication, one approach to consider is that all nearby cars is to estimate their positions with respect to road. The position can be estimated by GPS (General Positioning System) and the accuracy of position dependent on the number of measurements taken into account to precisely estimate the position of a car. In this case the network topology is the road topology, can be designed by help of GPS and the map of the road. The cars on the road can be represented in a real model of motion on the road map as discussed in [4].
There are some existing unicast routing protocols, called position-based protocols, designed for ad hoc mobile networks, can be directly applied to such Inter-vehicle Communication network, however according to the application requirements, broadcasting is good for sending messages to a set of nodes. Secondly the mobility is an issue in Inter-vehicle Communication network.
4.3.2 Speed and Heading (direction) estimations by using GPS
By using a specific number of measurements from GPS, we can predict speed as well as direction of the car. It is noted that the speed estimation given by GPS is much accurate to believe in, and can be used to calculate the time between two cars. This time is very important to know and will be use for deadlines for the data packets between those two cars and also to decide the appropriate actions to be taken when this time goes down some threshold value. The direction of the car is also calculated by using GPS measurements, but we have assumed to consider only one way road at this stage, so we already know that the cars are moving in a specific direction.
It is good idea to use the GPS measurements in order to predict position and speed. One support of this idea is the use of existing position-based routing protocols for ad hoc networks. Another support is that GPS is already installed in almost new models of some European companies; however other companies in Europe and Asia are still in process to decide the installation of GPS. The car owners can easily buy a GPS receiver even if there is no GPS installed by the company.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
12
Accurate estimation of speed is not a problem but in order to calculate the exact position, we have to consider many measurements. To get many measurements it takes many seconds to predict an accurate position, so further studies and calculations are required to decide the selection of using GPS for Inter-Vehicle Communication.
4.3.3 Routing Protocol for Ad hoc network with high rate of Nodes Mobility
As we discussed earlier, there is no proper infrastructure in ad hoc networks, sometimes called Infrastructure-less network. As it has also some limited range of wireless interfaces, multiple hops are required to communicate among far nodes. To implement such kind of multi hop network requires that every node also behave as router to forward the messages to other nodes that are far away and are not directly reachable.
With reference of [3], we would like to discuss and then compare some routing protocols designed for ad hoc networks. This discussion and performance comparison is with respect of high mobility of nodes in these protocols; such as DSDV, TORA, DSR, and AODV.
4.3.3.1 Destination Sequenced Distance Vector (DSDV)
DSDV is one of the types of Distance Vector Algorithm routing protocol, in which each node sends its routing table to its neighbouring nodes, the competition here is on ‘Sequence Number’ that is associated with each possible route and this protocol consider the routes with higher sequence numbers. One advantage of this protocol is that it advertises its increasing sequence number to guarantee the route freedom, if some existing route is broken.
4.3.3.2 Temporally Ordered Routing Algorithm (TORA)
TORA is on demand protocol, it don’t care of (short path first, SPF) at the first hand, but just choose the route quickly from a list of possible routes to reduce the communication overhead. A node sends a QUERY and then waits for UPDATE from destination node or any direct node to destination, by using such mechanism UPDATE makes the link from the node that generates it and the node that issues the QUERY. The implementation of TORA needs another protocol called IMEP [3] to provide reliability of messages as well as connections.

Design Space
13
4.3.3.3 Dynamic Source Routing (DSR)
One of the good routing protocols, eliminate the communication overhead of exchanging routing tables and then maintain them when the network changes. In DSR, data packets have all the information of their routes till destination. Before sending a packet, source node sends ROUTE REQUEST that travels all the way long until reply by ROUTE REPLY by destination node or any node that knows the destination. It is completely on-demand protocol, also needs to maintain the routes if the network topology changes. The property of on-demanding means that the new routes will update only when some one request those routes, so it eliminates the overhead due to unessential updating. Another feature of this protocol is that it supports unidirectional routes.
4.3.3.4 Ad Hoc On-Demand Distance Vector (AODV)
It takes advantage of both DSDV and DSR, takes the on-demand feature from DSR and hop-by-hop routing from DSDV [3]. So we can say that AODV is well capable of comparing with DSR. The sending node forward the ROUTE REQUEST first but with a little difference, when this packet reach to any node, that node take the record of reverse route from the source node. When the destination node generates the ROUTE REPLY having the record of how many hops are required for this link, as this reply reaches other nodes going back to sender, every node take the record of forward route to the destination as in the case of DSDV.
4.3.4 Performance Comparison of Routing Protocols
The interesting and essential step is to compare the performance of four routing protocols those are discussed above. In order to compare we borrowed some simulation results from [3], we have also borrowed following assumptions from [3];
• Communication is peer to peer • Speed of Moving nodes = 20 m / Sec • Data Rate = 4 Packets/ Sec • Almost in all simulation graphs, pause time is on x-axis. Pause time
defines the mobility. Zero pause time indicates constant mobility of nodes.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
14
4.3.4.1 Comparison with respect to Packet Delivery Ratio Packet Delivery ratio is defined as the ratio of number of packets originated at the sender side to the number of packets received at destination. It is helpful in maximize the throughput of the network by considering the loss rate.
The following graphs (Figure 4.1 and 4.2) are showing the result in the sense of Packet delivery ratio; (these graphs are borrowed from [3], permission to publish these graphs can be shown on demand)
Figure 4.1 Graph showing the Packet delivery ratio for DSDV and DSR (borrowed from [3])

Design Space
15
Figure 4.2 Graph showing the Packet delivery ratio for TORA and AODV (borrowed from [3])
Points to be noted: The following results can be easily examined from figure 4.1 and 4.2: DSR and AODV give very good packet delivery rate at constant mobility and on any number of resources (95% To 100%), TORA failed to provide reasonable packet delivery rate at constant mobility and increase in number of sources, however DSDV completely failed at constant mobility irrespective of number of sources
4.3.4.2 Comparison with respect to Routing Overhead
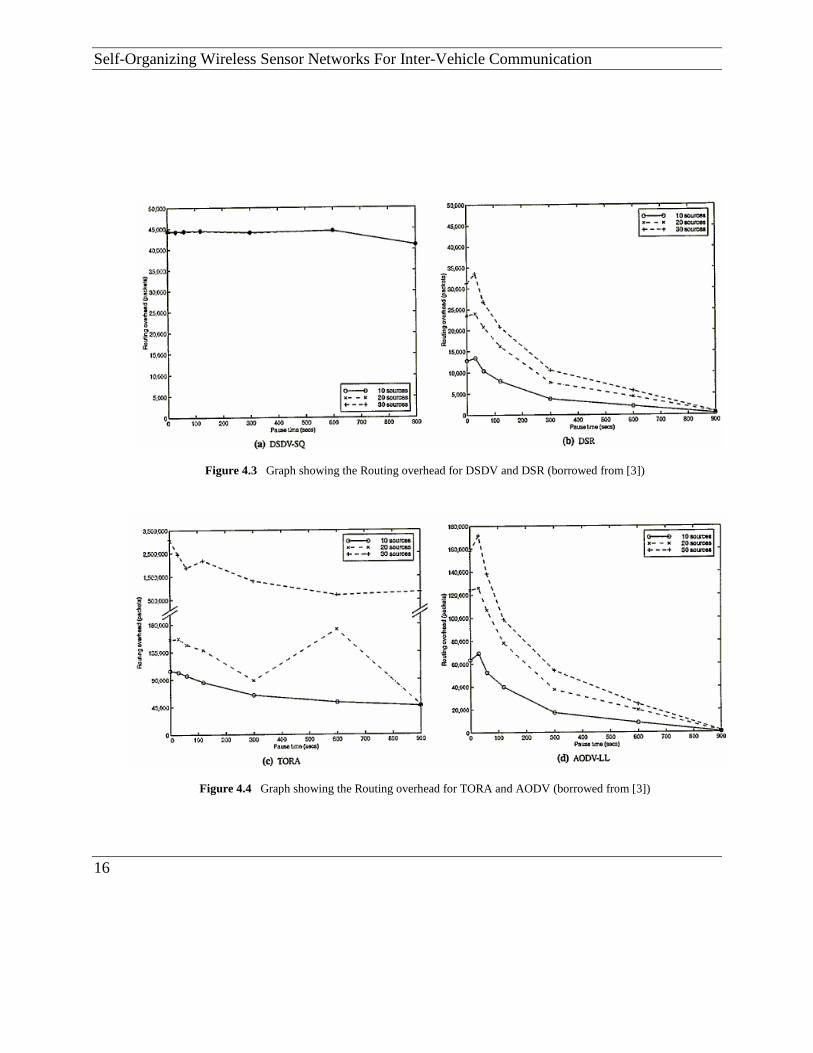
Another comparison parameter is routing Overhead, defined as, the number of times routing packets are transmitted. In simple words, let suppose a packet has to be transmitted from source to destination and there are 100 routers on the way, so routing overhead of that packet is 100. It is also quite interesting to look at comparison of these protocols with respect of their routing overhead because some of them are wholly or partly based on hop-to-hop communication. (Figure 4.3 and 4.4 are borrowed from [3], permission to publish these graphs can be shown on demand).
Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
16
Figure 4.3 Graph showing the Routing overhead for DSDV and DSR (borrowed from [3])
Figure 4.4 Graph showing the Routing overhead for TORA and AODV (borrowed from [3])

Design Space
17
Points to be noted: In figure 4.4, AODV and TORA are plotted on different scales on y-axis for 10 to 30 sources. The following results can be easily examined from figure 4.3 and 4.4:
� DSDV: routing overhead is almost constant 45 000 packets � DSR: routing overhead is from 13 000 to 32 000 � TORA: routing overhead is from 100 000 to 2 700 000 � AODV: routing overhead is from 65 000 to 1 60 000
Comments: when we were comparing routing protocols with reference of Packet delivery; DSR and AODV showing quite good and similar results. DSR is performed better than AODV as it has smaller routing overhead especially when the number of sources increase, or in other words when the network becomes congested. Our intention is to study these routing protocols, DSDV, TORA, DSR and AODV, and then analyze the results of DSR by considering the number of nodes and the speed of moving nodes. Our case is different as discussed in [3], because the discussed speed and the number of sources are less than as in our consideration and another important point is that these routing protocols show completely different behaviour at very high mobility. We expect that DSV and AODV will work better in our case (speed of moving nodes is 110 km /h or 30.5 m/s) and could give good packet delivery rate and have less routing overhead.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
18

A Self-Organizing Cluster
19
5. A Self-Organizing Cluster 5.1 Cluster Organization
In this section we will describe a number of alternatives for organizing a cluster or a group. Some clustering-organisation techniques are based on distance among the nodes while others based on relative position of each clustering node.
5.1.1 Distance-based Periodic Clustering
In this type of grouping, we divide the road into groups on the basis of specific distance. This is a kind of fixed road topology with only moving cars. Let say, our group size is 500 meter periodic:
Figure 5.1 Fixed Road Clustering
This idea is very basic and ideal because we know the road topology and can map this because it will always fix. This approach has a worst case; which is about cars just entering the new group. In this case it would no longer communicate directly (inter-group communication takes much time) to the following cars in the following group however it is of utmost in emergency cases.
This type of grouping is ideal for Vehicle-to-infrastructure Communication but can be employed in vehicle-to-vehicle communication with further research, for utilities or for non-real time traffic.
500 m
500 m
500 m
Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
20
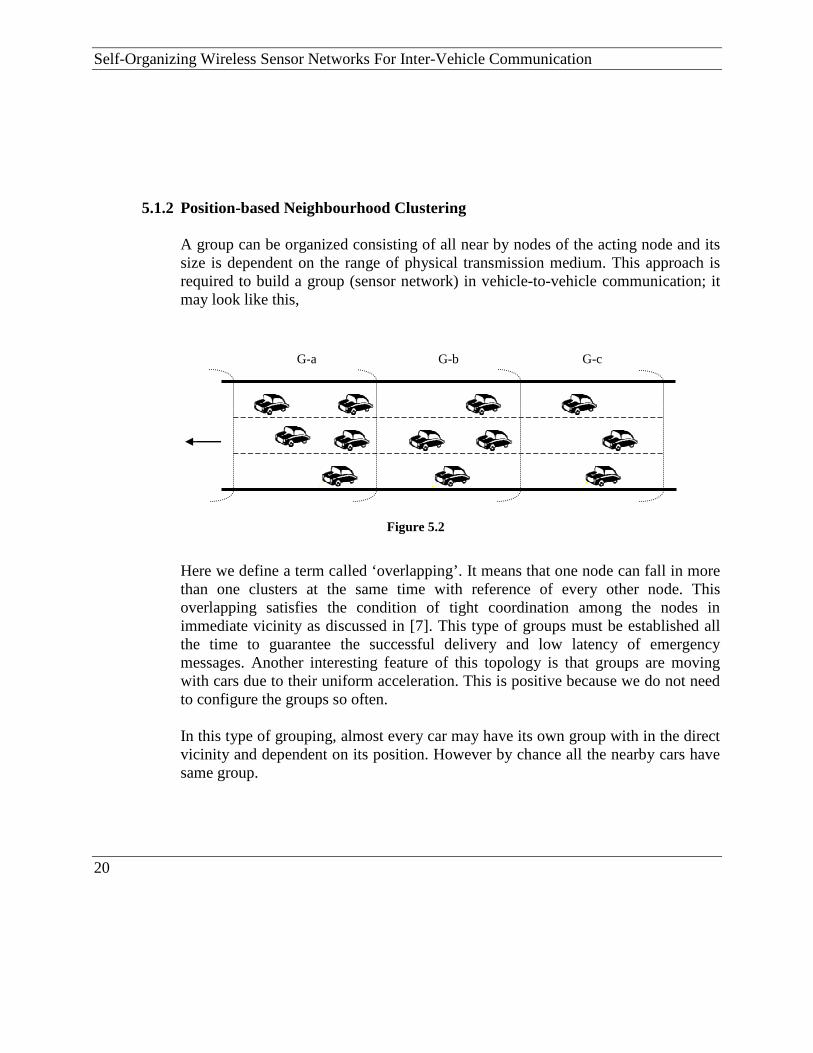
5.1.2 Position-based Neighbourhood Clustering
A group can be organized consisting of all near by nodes of the acting node and its size is dependent on the range of physical transmission medium. This approach is required to build a group (sensor network) in vehicle-to-vehicle communication; it may look like this,
Here we define a term called ‘overlapping’. It means that one node can fall in more than one clusters at the same time with reference of every other node. This overlapping satisfies the condition of tight coordination among the nodes in immediate vicinity as discussed in [7]. This type of groups must be established all the time to guarantee the successful delivery and low latency of emergency messages. Another interesting feature of this topology is that groups are moving with cars due to their uniform acceleration. This is positive because we do not need to configure the groups so often.
In this type of grouping, almost every car may have its own group with in the direct vicinity and dependent on its position. However by chance all the nearby cars have same group.
Figure 5.2
G-b G-a G-c

A Self-Organizing Cluster
21
5.1.3 On-Demand Clustering
On-Demand grouping is almost like the neighborhood groping but not periodic of only near-by nodes. It can consist of any nodes want to communicate with each other. This idea is quite reasonable and flexible but at the same time hard to control such a structure-less topology due to limited range of wireless transmission. It takes time to organize such an on-demand group and we can not guarantee this group to be established at all the time due to having less range and bandwidth (Capacity) of the wireless transmission.
5.2 Cluster Size
The size of cluster tells us the number of nodes resides in that cluster at some specific time. Appropriate size of each group is essential to reduce the packet collision, network contention and to afford the multiple acting cars and the redundancy of their messages. The cluster size depends on following factors: - Mainly depend on the transmission range of physical medium - Also depend on number of nodes on the road at a time (network congestion)
5.3 Size and Direction of Emergency message
5.3.1 Message Size
on or off (1 or 0), by using only 1 bit and avail all other bits for header (help in efficient routing because it is obvious that in multi-hop communication, less bits can be delivered in less time) this idea is well motivated as if there is some sudden and important information to send then it must be simple and straight forward.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
22
The negative aspect of this idea is that our intention is to avoid multiple collisions among cars, so in order to avoid such collisions; following and normal vehicles need some additional information like the proceeding/acting car’s identification, new position and new speed in the emergency messages
Message must contain the acting Car’s identification, Vehicle Status, Graphical position, Speed, Deceleration/Acceleration, Moving direction Intention and Information (this information may be useful in avoiding the collision like the Gap, the Condition of acting car, Tires condition, Road condition, braking system etc.)
5.3.2 Direction of the message
The direction of the message from the acting car is towards the following cars and side-by cars.
With reference of [6], the vehicle sending the emergency message is called ABNORMAL VEHICLE, AV and others called NORMAL VEHICLE, NV. Hereafter we called Acting and Non-Acting respectively.
To control a large number of acting cars, the message should also be sent towards the proceeding cars (a few in front). So by sending the emergency message in all directions, a car can be transitioned between the acting states. This idea of sending messages towards a few in front-vehicles is necessary to support the transitions of the acting vehicle states. If we have another idea to transit an acting vehicle among its states, then we can eliminate this idea.
5.4 Clusters Configuration
We assume that the wireless transmission range is 300 meters. In below examples, groups are organized on the basis of only one car in each group, which is being circled.

A Self-Organizing Cluster
23
5.4.1 Simple and Straightforward Case Let consider an example with very simple and ideal traffic scenario of 900 meters road. We assume the position-based neighbourhood grouping with a transmission range of 300 meters.
We divide the 900 meters road into three groups with respect of the car in each group which is being rectangle. If any one of these rectangle-cars becomes acting car, then it sends the emergency message directly to all cars in that group in one hop. Then the last car in that group or let say the last car which received the emergency message will then retransmit to its group. We can also adopt another idea; all the listening cars then retransmit the message in their groups but here are issues of network congestion and Capacity of network. So the idea of only last car in the group will retransmit the message is ideal and affordable. So the message will reach the following group in two hops and cover the area of 900 meters (~ 1 km) in just three or four hops, which is obviously affordable.
Figure 5.3
G-b G-a G-c

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
24
5.4.2 A little-bit confusing scenario Let consider another example with a little bit confusing traffic scenario of 900 meters road. We assume the position-based neighbourhood grouping with a transmission range of 300 meters.
We will follow the basic rule as discussed above but with some modifications as required (we divide the 900 meters road in to three groups with respect of the car in each group which is being rectangle. If any one of these rectangle-cars becomes acting car, then it sends the emergency messages directly to all cars in that group in one hop). In this case a vehicle is in between two groups (G-a and G-b) which is being circled, this vehicle is listening two different messages from the proceeding car as well as from the following car at the same time. This car will just ignore the message from following car because this message is just to inform the presence of an acting car behind it. But it will retransmit the message from the proceeding car so the emergency message will reach the following group.
Figure 5.4
G-b G-a G-c

A Self-Organizing Cluster
25
5.4.3 Completely confusing scenario
Let consider another example with a completely confusing traffic scenario of 900 meters road. We assume the position-based neighbourhood grouping with a transmission range of 300 meters.
In this case we have two different acting cars in one group (G-a), sending emergency messages due to different events. The circled car on the boundary of G-a and G-b, receives three different messages at the same time (two from group G-a and one from group G-b). This car will just ignore the message from following car because this message is just to inform the presence of an acting car behind it. But it must retransmit both messages from the proceeding cars of G-a because it is the last car in that group; here are two possibilities; One of the possibility is that it retransmit the emergency messages in the order of FCFS (first come, first serve). The second approach is based on the intelligence, this car first work out the important message and retransmits it first. The importance of message can be concluded by its respective position and distance. For example, in the above figure the circled car will retransmit the message of its nearby car and that is the one in the same lane and of less distance. This idea has a drawback with respect of latency delay because it takes time to differentiate among the messages, however FCFS eliminates this delay.
Figure 5.5
G-b G-a G-c
Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
26
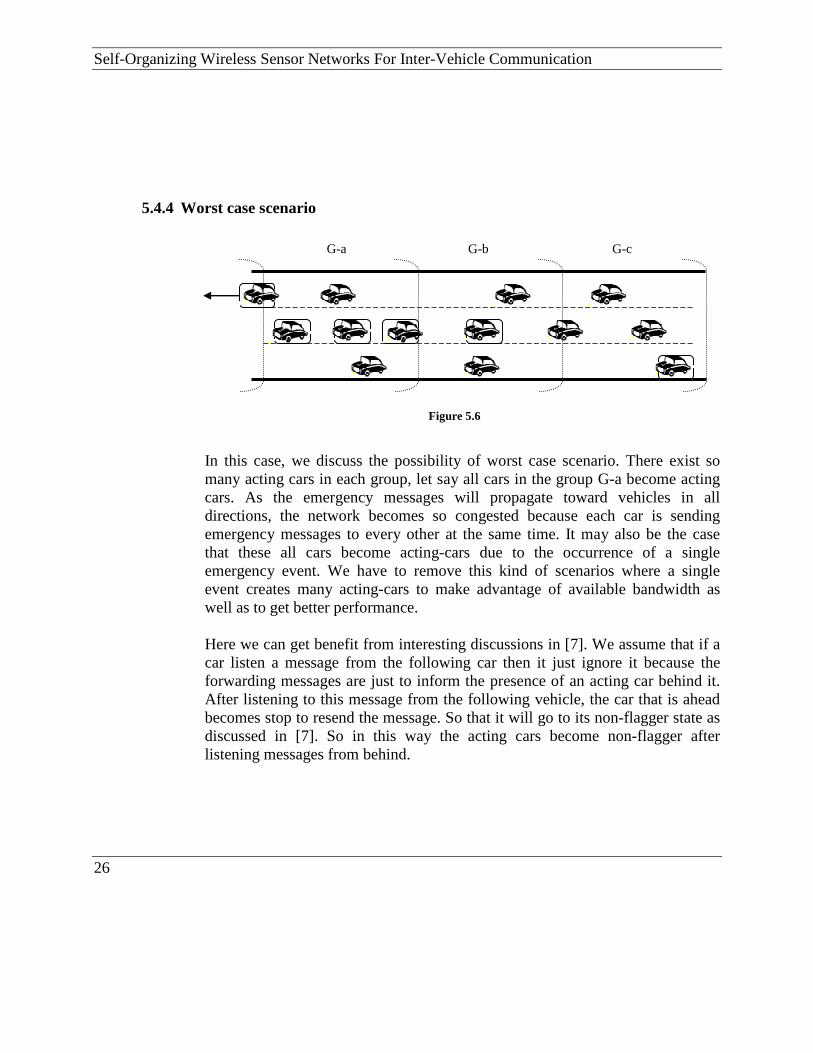
5.4.4 Worst case scenario
In this case, we discuss the possibility of worst case scenario. There exist so many acting cars in each group, let say all cars in the group G-a become acting cars. As the emergency messages will propagate toward vehicles in all directions, the network becomes so congested because each car is sending emergency messages to every other at the same time. It may also be the case that these all cars become acting-cars due to the occurrence of a single emergency event. We have to remove this kind of scenarios where a single event creates many acting-cars to make advantage of available bandwidth as well as to get better performance. Here we can get benefit from interesting discussions in [7]. We assume that if a car listen a message from the following car then it just ignore it because the forwarding messages are just to inform the presence of an acting car behind it. After listening to this message from the following vehicle, the car that is ahead becomes stop to resend the message. So that it will go to its non-flagger state as discussed in [7]. So in this way the acting cars become non-flagger after listening messages from behind.
Figure 5.6
G-b G-a G-c

A Self-Organizing Cluster
27
5.5 Survey of VCWC Protocol
In [6], they have designed and simulated a routing protocol for vehicle-to-vehicle communication, named as Vehicle Collision Warning Communication, VCWC Protocol. This broadcasting protocol is capable of following issues:
1. Reliable Delivery 2. Congestion Control Policies 3. Service Differential mechanism 4. Methods for emergency warning dissemination 5. Remove redundant emergency messages
In their proposed system, the vehicle sending emergency messages is called Abnormal Vehicle AV, having further classification in three states; Initial AV, Non-flagger, and flagger. So an AV may be transitioned among these three states. A vehicle may become AV, if it encounters one of the following conditions:
o Deceleration exceeding a certain threshold value o Dramatic Change in moving direction o Major mechanical failure o By reacting to other nearby acting vehicles
However our survey concludes that a vehicle may also become AV, if it encounters these two more conditions:
o Accelerates exceeding a certain threshold value o Due to its Driver behaviour (includes drinking/sleeping during driving)
Now the question rises, why we require different states of an abnormal vehicle and its transitions? The answer is as follows:
a. To ensure the message-coverage for the whole endangered area b. To eliminate the redundant emergency messages c. To use maximum capacity of network by removing redundancy

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
28
We also want to discuss some interesting challenges in the VCWC protocol for V2V Communication:
1. Delay in delivery of emergency messages due to unreliable nature of wireless
transmission (low latency) In 30 m/s; the delivery delay of emergency message should be in order of milliseconds.
2. Support for Multiple co-existing acting vehicles over a longer time 3. Differentiation of emergency messages (by different vehicles but due to a
single scenario) 4. Elimination of redundant emergency messages (by same vehicle and due to a
single scenario) Unfortunately, they have not discussed introduction in detail about the protocol that they have designed for V2V communication, the major part of their discussions is focus on two factors only:
o Low Delivery Delay (by introducing the `Rate Decreasing Algorithm` ) o State Transition of Abnormal-Vehicles ( to remove the redundant messages)
During our survey, we came to know that there are several interesting points and some more challenges which still remain to be solved; discussed as follows:
1. When (and on what conditions) a vehicle decides to react to its near-by Acting-
vehicle and decide to ignore or become acting-vehicle by itself? It depends on the distance among them as well as speed and the position. If the AV is in the same lane and the distance among them is small, then the near-by vehicle may become an AV due to the existed AV. Otherwise it remain as a normal vehicle and continue to retransmit the emergency message from the AV to the following group.

A Self-Organizing Cluster
29
2. To ensure the reliable transmission; the only way described is to repeatedly broadcast Emergency Messages (Retransmission of Emergency messages), is there any other way to make it reliable? Let say we don’t want to retransmit the emergency message. If we don’t retransmit then we don’t need to care about the redundancy of messages and have to look algorithms for removing this redundancy.
3. Advantages and Drawbacks of sending the same emergency message repeatedly;
off course the main advantage of sending the same message repeatedly is to make it reliable transmission and the major drawback is the misuse of capacity of network when it no longer needs to retransmission.
4. Let say we ignore the assumptions of GPS/DGPS in the vehicle; then how differ
will be the situation in that case? If we ignore the GPS/DGPS in the vehicles, then we are unable to predict the actual position of the vehicle in specific time, which is the utmost requirement in our considerations and at the same time we can predict the accurate speed by the help of GPS.
5. Transmission range is defined as 300 meters [as in DSRC]; is it possible to have an increase in the transmission range. If yes then what is major advantage of using large range. If radio transmission is large, then an approaching vehicle can tolerate a relative long delivery delays. In the same time we can afford more vehicles in the group and network remain stable even in the presence of more AV’s.
6. Maximum number of nodes discussed here are 100, what about in case of more than that or double or triple or 10 times, will the network remain stable in that case?

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
30
It depends on the transmission range and polices we are using for network congestion. If we have some mechanism to accommodate the new vehicles successfully and control the number of AV’s at specific time, then the network remain stable until a specific transmission rate. We can also use some rate decreasing algorithms to accommodate the new AV’s with appropriate transmission rate.
7. They did not mentioned how they came up with the equations for D̀elay due to waiting time ̀and ̀Retransmission delay`.
8. According to some assumption:
a. All emergency messages are of same size
We think we may have different sizes of messages to reduce the channel contention and packet collisions, like a vehicle should send the shortest and necessary message as required. All vehicles don’t need to send according to the designed format or size of message.
b. The service is assumed to be FCFS, but we can also assume some other efficient order to support/deliver the high-priority messages first.
9. Scheduling (the ability to meet the deadlines) There must be discussion on `deadlines` attached with each packet as in a real-time data communication and a discussion on Deadlines, how they are calculated and what happens if a deadline has expired; should the node send those packets again?
10. What is the network load and delay in order to transitioning a vehicle between its states

Analysis and Simulation of DSR
31
6. Analysis and Simulation of DSR
6.1 Routing Requirements for V2V Communication
On the basis of technical issues discussed above in section 4.1, we try to summarize some basic requirements for a routing protocol required for V2V communication applications:
1. Support for MANET
The basic requirement for a V2V-Communication routing protocol is to support Mobile Ad-hoc Networks. As we discussed some of the MANET routing protocols in section 4.2 and while comparison of four MANET routing protocols in section 4.3.3, we came to the decision of trying to analyze the DSR routing protocol for our V2V-Communication.
2. Support of Multi-Hop as well as Single-Hop communication
Multi-Hop functionality of the routing protocol is also one of the important tasks here because a node cannot send messages to all along the network due to the unreliable nature and limited range of wireless transmission.
3. Connectivity Assurance
a. The routing algorithm must check the connectivity of neighbouring nodes and assure this connection all the time.
b. The routing algorithm can also be able to evaluate the reliability, i.e. evaluate the throughput, delay-time and routing overhead during the session.
4. Exchanging the Routing Information
This issue addresses the need of sending the useful information about the routing and routing table to the rest of the network, so that all the nodes in the network become familiar with the routing information at each specific occasion.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
32
5. Updating the Routing Information
What will happen when the network topology will change; the nodes must know the new routing information in order to send the data along the path chosen by shortest path first algorithm or by some other efficient mechanism. This can be done by an efficient algorithm to update all the routing information throughout the network; either by changing the routing tables or by another mechanism available by the protocol.
6. Some other interesting challenges
a. Congestion Control policies b. Methods for emergency warning messages c. Remove the redundancy of emergency messages
As we assumed that the acting-vehicle continuously sends the same emergency message, so this sending of messages may create redundancy of messages. There must be some mechanism to remove this kind of situation. We can handle it by using some strategy like this vehicle will stop sending the message if it hear the same message from a vehicle behind it.
6.2 DSR studies against V2V-Communication requirements
6.2.1 Introduction to DSR
DSR: The Dynamic Source Routing protocol is a multi-hop wireless ad-hoc network routing protocol. It is fully on-demand, efficient, fast, and reliable, self-organized and self-configured protocol. Self-organizing and self-configuring means that it can handle the high mobility of the network by organizing and configuring the new-coming nodes in the network; automatically and without any administration. It can also support multi-hop routing by resending the message to far away nodes of the network where the message cannot reach directly; with the assumption that every node act as router at the same time. From our discussions above; we can assume that the DSR has an excellent throughput (packet delivery ratio) and very low routing overhead as compared to other MANET protocols.

Analysis and Simulation of DSR
33
6.2.2 Protocol Description & Features
The DSR has two basic mechanisms: ROUTE DISCOVERY and ROUTE MAINTENANCE. These two mechanisms can discover and then maintain the source routes from the source to any destination in the network [9].
6.2.2.1 Route Discovery
A part of DSR is the Route Discovery which is completely on-demand and helps the protocol to discover the new routes from a source to a specific target. Its on-demand nature completely eliminate the requirement of periodically discover the new routes until the nodes are stationary and if it change then DSR only scales to the required level.
Let say a node-1 wants to send a message to node-23 in the network. First of all node-1 searches it’s Route Cache (all nodes have a cache having multiple routes to any destination), if it gets the possible route to the required destination then it simply places it in the packet header with all the details including the sequence of hops. On the other hand, if it does not find any route for that specific destination then it initiates the Route Discovery to search the new route for that destination by sending the Route Request. The node-1 then receives Route Reply from the destination itself or from any other node having route to that destination in its cache. During the waiting time of Route discovery, the actual data packet is saved in a buffer at the source node.
6.2.2.2 Route Maintenance
This part of DSR is the Route Maintenance which is also completely on-demand and helps the protocol to maintain the already known routes from a source to a specific target. It can able a node to know the new routes by initiating the Route discovery if the old routes are expired and no longer in use. Its on-demand nature completely eliminates the requirement of periodically maintain and update the known routes until the nodes are stationary and all the previous routes still exists otherwise if it change then DSR only scales to the required level.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
34
Let consider there are five hops in order to receive packets at the destination and every node retransmitting packets will assure the successful transmission to the next hop (this can be done by some confirmation mechanism from the receiver). If any intermediate node do not send the packets successfully; will send a Route Error message back to the source node. After receiving the Route Error, the source node become inform that this link or route no longer exists so retransmit packet using another route by looking again in its cache to any other possible link to the destination. If there is no other route exists, then it initiates Route Discovery phase to find out the new possible route to the destination.
6.3 Simulation of DSR
6.3.1 Technical Assumptions
Our proposed DSR protocol is simulated by using ns 2 Simulator (version 2.29) and running Cygwin (version gcc-2.95) on Windows XP platform [10]. Cygwin provides a Unix-like API running on windows platform. In order to view the node mobility and communication patterns in real time, we use a graphical interface called NAM (NAM-1.0a11a-win32). To draw graphs and tables, a tool called xgraph is available with ns 2 simulator, but unfortunately we were unable to install this component on our machine. Instead of xgraph; we use another tool called gnuplot (version gnu-4.0.0).
The channel type is “wireless channel”, the radio-propagation module is “TwoRayground”, the antenna type is “OmniAntenna”, MAC type is MAC 802.11b (IEEE specifications for wireless communication) and off course the routing protocol is DSR (Dynamic Source Routing). The transmission range of wireless connection is nearly 100 meters. So we require multiple-hop communication in order to send messages among nodes those are over 100 m apart.
6.3.2 Road Topology
The interesting and challenging issue in simulation is how to construction the road topology as much as real as possible. We have defined a 100 meter piece of road with only two lanes; a normal lane and an overtaking lane. The distance among the lanes is assumed to be 2 meters. In this 100 meter road, we distribute 10 nodes (the idea of

Analysis and Simulation of DSR
35
choosing the number of nodes came from saying that let say 100 nodes in 1 km; hence 10 nodes in 100 m to make the simulation simple).
These 10 nodes are distributed randomly and moving with different accelerations (rate of change of speed is not same). Our road topology is some how look like this figure 6.1,
Figure 6.1 Showing the Road Topology for 100 meters
The distance of each node from road–sides is 1 meter approximately, so the distance for lane-to-lane communication is 2 meters. All nodes are moving with different rate of change of speed so that the road topology will continuously change during the simulation to really simulate the scenario as in reality. Node 0: 137 km/h
Node 1: 133 km/h Node 2: 139 km/h Node 3: 126 km/h Node 4: 137 km/h Node 5: 126 km/h Node 6: 144 km/h Node 7: 122 km/h Node 8: 137 km/h Node 9: 122 km/h

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
36
6.3.3 Simulation Scenarios
We simulate the above stated road topology for a duration of 9.90 seconds with respect to three different traffic scenarios. In all scenarios, we assume that all nodes sent data at the same rate. The communication is multi-hop in all scenarios except the case of communication in direct vicinity where all nearby nodes are within the transmission range. The time in seconds is represented on the x-axis as ‘TIME(s)’ while ‘PACK’ along y-axis represents the number of packets received and lost during the connection.
6.3.3.1 Communication in Direct Vicinity
In this simulation we implemented the above stated topology and only consider the communication from node 0 to its direct vicinity; node 1, 2 and 3.
The following graph is showing the packet-received and packet-lost in the sink of each node. The size of each packet is 1000 bytes, as we are using a permanent packet format (each packet transmitted from each node is of same size). The following results will be different for different packet sizes and by changing the speed of nodes.
Figure 6.2 Graph showing the packets received and lost at NODE 1

Analysis and Simulation of DSR
37
Figure 6.3 Graph showing the packets received and lost at NODE 2
Figure 6.4 Graph showing the packets received and lost at NODE 3

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
38
The above graphs showing the number of packets received and lost during the communication with nodes in direct vicinity. It is clear that it gives excellent number of received packets with respect to lost packets; the ratio of received packet to lost packets is high.
6.3.3.2 Communication with nodes at a distance of 100 m
In this simulation we implemented the above stated topology and only consider the communication at a distance of 100 meters approximately; from node 0 to node 6 and 7.
The following graph is showing the packet-received and packet-lost in the sink of each node. The size of each packet is 1000 bytes, as we are using a permanent packet format (each packet transmitted from each node is of same size). The following results will be different for different packet sizes and by changing the speed of nodes.
Figure 6.5 Graph showing the packets received and lost at NODE 6

Analysis and Simulation of DSR
39
Figure 6.6 Graph showing the packets received and lost at NODE 7
In these graphs the ratio of received packets to lost packets is also high but not too much. If we run this simulation for 100 seconds then it is obvious that after few seconds the loss-rate become stable while received-ratio continues to increase. So we can say that it is affordable because in this scenario we have some time and deadlines are not in the order of milliseconds.
6.3.3.3 Communication with far-away nodes
In this simulation we implemented the above stated topology and only consider the communication with far away nodes; from node 0 to node 8 and 9.
The following graph is showing the packet-received and packet-lost in the sink of each node. The size of each packet is 1000 bytes, as we are using a permanent packet format (each packet transmitted from each node is of same size). The following results will be different for different packet sizes and by changing the speed of nodes.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
40
Figure 6.7 Graph showing the packets received and lost at NODE 8
Figure 6.8 Graph showing the packets received and lost at NODE 9
Analysis and Simulation of DSR
41
During the communication with far away nodes, we can notice that the packet-lost is higher than the packet-received initially and then become equal after 6 seconds. After that the packet-received starts increasing rapidly while packets-loss becomes stable. In this case packet-lost and packet-received are comparable because they are slightly different.
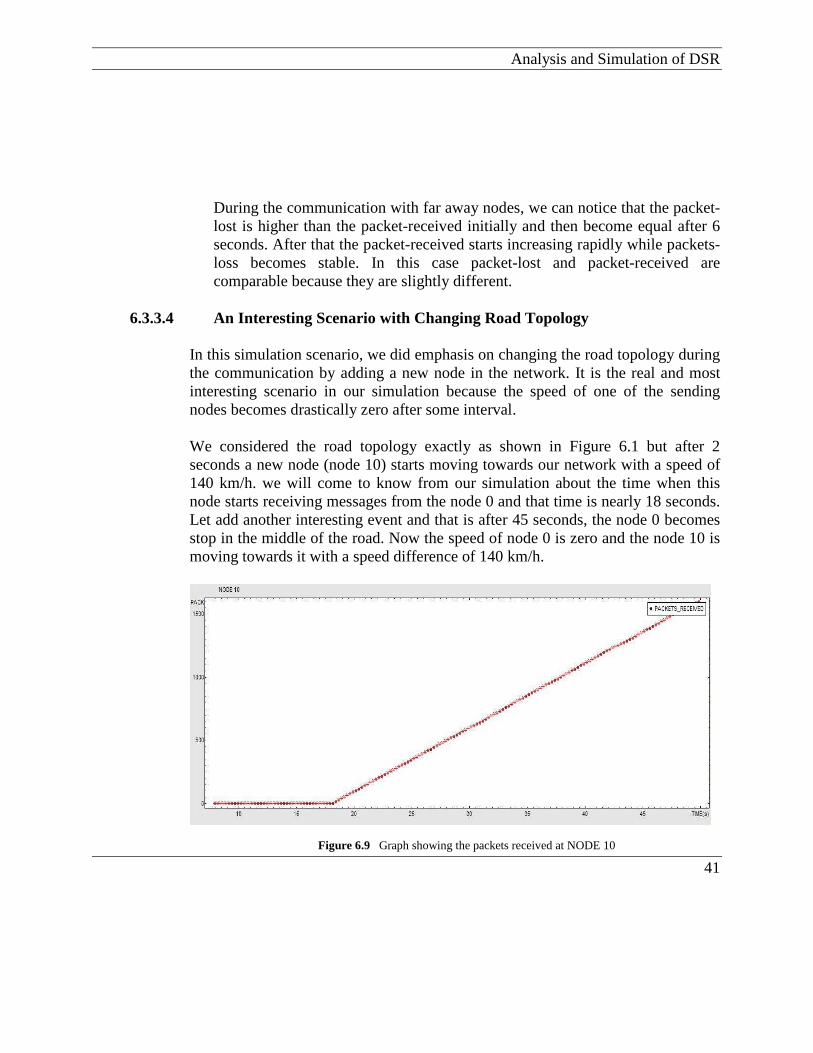
6.3.3.4 An Interesting Scenario with Changing Road Topology
In this simulation scenario, we did emphasis on changing the road topology during the communication by adding a new node in the network. It is the real and most interesting scenario in our simulation because the speed of one of the sending nodes becomes drastically zero after some interval.
We considered the road topology exactly as shown in Figure 6.1 but after 2 seconds a new node (node 10) starts moving towards our network with a speed of 140 km/h. we will come to know from our simulation about the time when this node starts receiving messages from the node 0 and that time is nearly 18 seconds. Let add another interesting event and that is after 45 seconds, the node 0 becomes stop in the middle of the road. Now the speed of node 0 is zero and the node 10 is moving towards it with a speed difference of 140 km/h.
Figure 6.9 Graph showing the packets received at NODE 10

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
42
The above graph is showing the packet-received in the sink of this new node. The size of each packet is 1000 bytes, as we are using a permanent packet format (each packet transmitted from each node is of same size). The following results will be different for different packet sizes and by changing the speed of nodes.
We can see from our simulation that node 10 receives no packet when it was moving towards the network until it becomes in the range of transmission. So in first 18 seconds node 10 receives nothing that we can easily see in the graph. After 18 seconds, node 10 starts receiving messages and the number of receiving-messages increase as it comes closer and closer. At time 45 seconds, the node 0 which is our acting node becomes stop in the middle of the road. Now node 0 is still in the middle of the road while node 10 is moving towards it with a speed of 140 km/h. The question here is how long node 10 would take to reach just behind the node 0 and that will be our deadline. We estimate this time from our simulation and came to know that it takes 5 seconds to get the node 0 so we stop our simulation at time 50 seconds (50-45= 5 seconds). Now it is time to investigate the number of packets-received by node 10 in time 50 seconds. We can see from our simulation that in 50 seconds almost 1700 packets have been received in the sink of node 10 and each packet size is of 1000 bytes. So in 50 seconds, node 10 received 1700 000 bytes which are enough to send many emergency messages before its collision with node 0.

Conclusion
43
7. Conclusion In order to guarantee the road safety, traffic safety and passenger safety, Inter-Vehicle Communication is one of the most important factors. In such communication, the nearby cars are communicating each other directly or indirectly (multi-hop architecture) and send the emergency warning messages about their actions, such actions may be sudden and may cause disturbance or confusion that may lead to severe accidents. We have investigated some research questions and challenges in the field of V2V communication. We have also discussed some interesting ideas of how to organizing sensor networks for such communication and how to handle individual nodes in those networks. This work also contains detailed discussions on routing protocols for mobile ad hoc networks MANET. We conclude that the Dynamic Source Routing Protocol (DSR) is an ideal routing protocol for V2V communication after its performance comparison with other MANET routing protocols and after looking at results of our own simulation. We have simulated a 100 meter piece of road with 10 nodes; each node is moving with different speed, ranges from 122km/h to 140 km/h and then compared the packet-received and packet-lost at each node. The DSR routing protocol work good for nodes in direct vicinity but quite confusing results while communication with far away nodes. However it is candidate protocol for V2V communication. After investigating our simulation we are quite confident to say that some modifications in DSR or some additions in its route maintenance will work better for V2V communication.
Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
44

Future Work
45
8. Future Work
We have simulated the DSR routing protocol in a very simple manner and tried to prove it as it is, but our future recommendation to continue this work is to simulate DSR in some worst case scenarios or at least in confusing situations, for example, in a congested network having hundred of vehicles and all are sending emergency messages at the same time. Here are some suggestions to simulate V2V communication system in future:
� We have assumed only one-way of the road having only two lanes in it, but our recommendation is to consider two-way road having at least 5 lanes in each side.
� Change road topology. In our work, we have assumed ten nodes and simulate only 100 meters piece of road. The suggestion for road topology is to simulate at least 1 km of road having more than 100 vehicles distributed randomly and try to simulate the worst situations. These situations may be harsh like all vehicles become acting vehicle and sending emergency warning messages.
� We only simulated the packets-received and packets-lost at each node, this can be
made better by simulating the total performance including packets delivery ratios as well as routing overheads. It is also interesting to find out the delay correspond to each packet.
� After simulating DSR with above mentioned parameters, study and compare results
and if this protocol will not perform well then try to really modify the routing protocol based on the system requirements of V2V communication.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
46

Future Work
47
A. Security in V2V Communication
Security issues in Inter-vehicle communication have not taken in account seriously by researchers so far. The reason is that no special secrecy is needed in such systems and there are no confidential messages to be sent by cars in harsh conditions. A security system called DAHNI (driver ad hoc networking infrastructure) is discussed in [1]. To measure the accurate distance between cars, there may be need for some secret key, but this issue is out of scope of this work.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
48

Appendix -B
49
B. Assumptions & Limitations
� Consider only one way of the road, having two lanes in it.
� Preferably talk about cars instead of vehicles.
� The focus of the project from application point of view is to avoid multiple car-collisions.
� Consider issues on Routing protocol, not on MAC protocol or Network protocols.
� Other communication applications; like sending non real-time messages, chat facility or talking cars are out of scope of this work.
� All nodes in the network have GPS/DGPS in order to predict the geographical position.
� All nodes in the network have at least one receiver and a transmitter in order to communicate to other nearby cars.
� All nodes can also act as routers in order to support multi-hop communication.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
50

References
51
References
[1] Jun Luo and Jean-Piesrre Hubaux, “A Survey of Inter-Vehicle Communication”, Technical
Report IC/2004/24, School of Computer and Communication Sciences, EPEL. [2] Andre Ebner and Hermann Rohling, “A Self-Organized Radio Network for Automotive
Application”, Proceedings of 8th World Congress on Intelligent Transport Systems ITS-2001. [3] Josh Broch, David A. Maltz, David B. Johnson, Jorjeta jetcheva, “A Performance
Comparison of Multi-Hop Wireless Ad Hoc Network Routing Protocols”, Proceedings of ACM/IEEE, MOBICOM October 1998.
http://www.monarch.cs.cmu.edu/ [4] Amit kumar Saha and David B. Johnsson, “Modelling Mobility for Vehicular Ad Hoc
Networks”, First ACM workshop on Vehicular Ad-Hoc networks (VANET 2004), Philadelphia & Pennsylvania, October 2004.
[5] Michael Meincke, Peter Tondl, Maria Dolores Perez Guirao and Klaus Jobmann, “Wireless
Ad hoc Networks for Inter-Vehicle Communication”, ACM symposium on Mobile Ad-Hoc Networking & Computing, MOBIHOC 2001.
[6] Xue Yang, Jie Liu, Feng Zaho and Nitin H. Vaidya, “A Vehicle-to-Vehicle Communication
Protocol for cooperative Collision Warning”, Proceedings of the first annual International Conference on Mobile and Ubiquitous systems: Networking and Services, MobiQuitous 2004.

Self-Organizing Wireless Sensor Networks For Inter-Vehicle Communication
52
[7] Masayoshi Aoki and Haruki Fujii, “Inter-Vehicle Communication: Technical Issues on Vehicle Control Application”, IEEE Communication Magazine, October 1996
[8] Xiaoyan Hong, Kaixin Xu and Mario Gerla, “Scalable Routing Protocols for Mobile Ad Hoc
Networks”, University of California at Los Angeles, a part of ONR “MINUTEMAN” project, IEEE Network, July/August 2002
[9] Josh Broch, David A. Maltz and David B. Johnson, “DSR: The Dynamic Source Routing
protocol for Multi-Hop Wireless Ad Hoc Networks”, Computer Science Department, Carnegie Mellon University, Pittsburgh, PA 15213
http://www.monarch.cs.cmu.edu/ [10] Eitan Altman and Tania Jimenez, “Documentation, Help and Download ns-2 Simulator”,
Lecture Notes 2004, University de Los Andes, Merida, Venezuela and ESSI, Sophia- Antipolis, France. http://www.isi.edu/nsnam/ns/ns-build.html


















