Selecting parameters to optimize ... -...
16
Selecting parameters to optimize in model calibration by inverse analysis Michele Calvello, Richard J. Finno * Department of Civil and Environmental Engineering, Northwestern University, Evanston, IL 60208, USA Received 28 May 2003; received in revised form 11 August 2003; accepted 26 March 2004 Available online 25 May 2004 Abstract A study evaluating the benefits of using inverse analysis techniques to select the appropriate parameters to optimize when calibrating a soil constitutive model is presented. The factors that affect proper calibration are discussed with reference to the op- timization of the elasto-plastic Hardening-Soil model for four layers of Chicago glacial clays. The models are initially calibrated using results from triaxial compression tests performed on specimens from four clay layers and subsequently re-calibrated using incli- nometer data that recorded the displacements of a supported excavation in these clays. Finite element simulations of both the triaxial tests and the supported excavation are performed. A parameter optimization algorithm is used to fit the computed results and ob- served data, expressed in the form of stress–strain curves and inclinometer readings, respectively. A procedure is presented which uses the results of sensitivity analyses conducted on the soil model parameters for the identification of the relevant and uncorrelated parameters to calibrate. In both cases the inverse analysis methodology effectively calibrates the soil parameters considered, which numerically converge to realistic values that minimize the errors between computed responses and experimental observations. Ó 2004 Elsevier Ltd. All rights reserved. 1. Introduction In a finite element simulation of a geotechnical problem, calibrations of the models used to reproduce soil behavior often pose significant challenges. Real soil is a highly nonlinear material, with both strength and stiffness depending on stress and strain levels. Numerous constitutive models have been developed that can cap- ture many of the important features of soil behavior. However, developing soil parameters for use in consti- tutive models is a procedure that involves much judg- ment and usually is best accomplished by experienced users of a particular model. An effective and more ob- jective way to calibrate a soil model employs inverse analysis techniques to minimize the difference between experimental data (laboratory or field tests) and nu- merically computed results [1,2]. For some large geotechnical engineering projects, for example, deep supported excavations in urban envi- ronments, it is usual to record ground movements developed during construction to evaluate the perfor- mance of the designed system. In some cases the data are used to control the construction process and update predictions of movements given the measured defor- mations at early stages of constructions. This procedure is referred to as the ‘‘observational method’’ [3–5]. This approach usually entails the use of pre-construction analysis and parametric studies coupled with much en- gineering judgment. Inverse analysis techniques con- ceptually can be used to enhance the conventional observational method practice by using the monitoring data to optimize automatically a numerical model of a geotechnical project. Recent work in related civil engi- neering fields (e.g. [6–9]) demonstrate that inverse modeling provides capabilities that help modelers sig- nificantly, even when the simulated systems are very complex. However, there are a number of issues that affect proper calibration, including the number of parameters to be optimized, which depends on both the site stra- tigraphy and number of parameters in the selected * Corresponding author. E-mail address: r-fi[email protected] (R.J. Finno). 0266-352X/$ - see front matter Ó 2004 Elsevier Ltd. All rights reserved. doi:10.1016/j.compgeo.2004.03.004 Computers and Geotechnics 31 (2004) 411–425 www.elsevier.com/locate/compgeo
Transcript of Selecting parameters to optimize ... -...

Computers and Geotechnics 31 (2004) 411–425
www.elsevier.com/locate/compgeo
Selecting parameters to optimize in model calibrationby inverse analysis
Michele Calvello, Richard J. Finno *
Department of Civil and Environmental Engineering, Northwestern University, Evanston, IL 60208, USA
Received 28 May 2003; received in revised form 11 August 2003; accepted 26 March 2004
Available online 25 May 2004
Abstract
A study evaluating the benefits of using inverse analysis techniques to select the appropriate parameters to optimize when
calibrating a soil constitutive model is presented. The factors that affect proper calibration are discussed with reference to the op-
timization of the elasto-plastic Hardening-Soil model for four layers of Chicago glacial clays. The models are initially calibrated using
results from triaxial compression tests performed on specimens from four clay layers and subsequently re-calibrated using incli-
nometer data that recorded the displacements of a supported excavation in these clays. Finite element simulations of both the triaxial
tests and the supported excavation are performed. A parameter optimization algorithm is used to fit the computed results and ob-
served data, expressed in the form of stress–strain curves and inclinometer readings, respectively. A procedure is presented which uses
the results of sensitivity analyses conducted on the soil model parameters for the identification of the relevant and uncorrelated
parameters to calibrate. In both cases the inverse analysis methodology effectively calibrates the soil parameters considered, which
numerically converge to realistic values that minimize the errors between computed responses and experimental observations.
� 2004 Elsevier Ltd. All rights reserved.
1. Introduction
In a finite element simulation of a geotechnical
problem, calibrations of the models used to reproduce
soil behavior often pose significant challenges. Real soil
is a highly nonlinear material, with both strength and
stiffness depending on stress and strain levels. Numerousconstitutive models have been developed that can cap-
ture many of the important features of soil behavior.
However, developing soil parameters for use in consti-
tutive models is a procedure that involves much judg-
ment and usually is best accomplished by experienced
users of a particular model. An effective and more ob-
jective way to calibrate a soil model employs inverse
analysis techniques to minimize the difference betweenexperimental data (laboratory or field tests) and nu-
merically computed results [1,2].
For some large geotechnical engineering projects, for
example, deep supported excavations in urban envi-
* Corresponding author.
E-mail address: [email protected] (R.J. Finno).
0266-352X/$ - see front matter � 2004 Elsevier Ltd. All rights reserved.
doi:10.1016/j.compgeo.2004.03.004
ronments, it is usual to record ground movements
developed during construction to evaluate the perfor-
mance of the designed system. In some cases the data are
used to control the construction process and update
predictions of movements given the measured defor-
mations at early stages of constructions. This procedure
is referred to as the ‘‘observational method’’ [3–5]. Thisapproach usually entails the use of pre-construction
analysis and parametric studies coupled with much en-
gineering judgment. Inverse analysis techniques con-
ceptually can be used to enhance the conventional
observational method practice by using the monitoring
data to optimize automatically a numerical model of a
geotechnical project. Recent work in related civil engi-
neering fields (e.g. [6–9]) demonstrate that inversemodeling provides capabilities that help modelers sig-
nificantly, even when the simulated systems are very
complex.
However, there are a number of issues that affect
proper calibration, including the number of parameters
to be optimized, which depends on both the site stra-
tigraphy and number of parameters in the selected

412 M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425
constitutive model, the interdependence of the model
parameters within the framework of the constitutive
model, the number of observations, and the type of
system under consideration.
In this paper, these factors are discussed and illus-trated by presenting results of inverse analyses used to
optimize the calibration of the Hardening-Soil (H-S)
model [10] for four layers of Chicago glacial clays. The
models are initially calibrated using results from triaxial
compression tests performed on specimens from the four
clay layers and subsequently re-calibrated using incli-
nometer data that recorded the displacements of a
supported excavation in these clays [11]. This paperdescribes the concepts of model calibration by inverse
analysis, summarizes the soil model used to define the
behavior of the clay considered, discusses the factors
that affect proper calibration, presents the results of the
model calibration from triaxial test data and from field
monitoring data and draws conclusions.
2. Model calibration by inverse analysis
In inverse analysis, a given model is calibrated by
iteratively changing input values until the simulated
output values match the observed data (i.e., observa-
tions). Fig. 1 shows a schematic of an inverse analysis
procedure. The input parameters are initially estimated
by conventional means. Much literature exists on thissubject, for example, a number of papers in the McGill
conference (i.e. [12–14]) describe how this first step is
done for a number of constitutive models for soils, i.e.,
a hyperbolic stress–strain model [12,13], and a
bounding surface model [14]. A numerical simulation
Numerical Model
Input parameters
Updated input parameters
Regression(objective function minimization)
Modeloptimized?
Initial input parameters
NO
YES
Computed results
ENDSTART
Optimized input parameters
Observations
Iter
ativ
e pr
oces
s
Fig. 1. Schematic of inverse analysis procedure.
of the problem is conducted and the simulated results
are compared to the available observations. A regres-
sion analysis is performed to minimize an objective
function, which quantifies the fit between computed
results and observations. Its minimization is attainedby the optimization of the input parameters needed to
perform the numerical simulation. If the model fit is
not ‘‘optimal’’, the procedure is repeated until the
model is optimized.
Inverse analysis algorithms allow the simultaneous
calibration of multiple input parameters. However,
identifying the important parameters to include in the
inverse analysis can be problematic. Indeed, in mostpractical problems it is not possible to use the regres-
sion analysis to estimate every input parameter of a
given simulation. The number and type of input pa-
rameters that one can expect to estimate simultaneously
depend upon many factors, including the characteristics
of the selected soil model, how the model parameters
are combined within the element stiffness matrix in a
finite element formulation, the site stratigraphy, thenumber and type of observations available, the char-
acteristics of the simulated system, and computational
time issues.
Fig. 2 shows a procedural flowchart used for the
identification of the parameters to optimize in the finite
element simulations of geotechnical problems. Note that
the first step of the procedure refers to the selection of
the model parameters that are relevant to the problemunder study. The last two steps, necessary if multiple soil
layers are calibrated simultaneously, refer to the selec-
tion of the total number of parameters that are opti-
mized in the simulation of the field scale problem. In this
paper, the first step is illustrated with results of simu-
lations of triaxial compression tests and the latter two
steps are illustrated with the simulation of a deep, sup-
ported excavation.In the work described herein, model calibration by
inverse analysis is conducted using UCODE [15], a
computer code designed to allow inverse modeling
posed as a parameter estimation problem. UCODE was
developed for ground-water models, but it can be ef-
fectively used in geotechnical modeling because it works
with any application software that can be executed in a
batch mode. Its model-independency allows the chosennumerical code to be used as a ‘‘closed box’’ in which
modifications only involve model input values. This is
an important feature of UCODE in that it allows one to
develop a procedure that can be easily employed in
practice and in which the engineer will not be asked to
use a particular finite element code or inversion algo-
rithm. Rather, macros can be written in a windows en-
vironment to couple UCODE with any finite elementsoftware. The commercial software PLAXIS 7.11 [16]
was used herein to simulate the soil behavior with the
H-S model [10].

Input.txtPLAXIS Input
PLAXIS Calculation
PLAXIS Output Output
ASCII I/OPLAXIS
Modeloptimized?
START
Initial parameters
NO
YES
Observations
Macro
Regression(multiple PLAXIS runs)
Best-fit parameters
END
Updated parameters
Fig. 3. Inverse analysis with UCODE and PLAXIS.
Fig. 2. Identification of soil parameters to optimize by inverse analysis.
M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425 413
Fig. 3 shows a schematic of the interaction between
UCODE and PLAXIS during the inverse analysis.
PLAXIS, a Windows-based program, does not have any
option to save input or output files in ASCII format.
Therefore, windows-macros were written to convert thePLAXIS I/O into text files. The macros are needed to
produce model changes in PLAXIS-Input from an input
text file, switch between PLAXIS modules, calculate the
simulated model in PLAXIS-Calculation, and generate
an output text file from the PLAXIS-Output. Note that
the procedure needs no user intervention once the
analysis has been started. For more details, see [17].
3. Chicago glacial clays
Much of the subsoil in the Chicago area consists of
fairly distinct strata deposited during the advances and
retreats of a glacier during the Wisconsin Stage. Theadvance and retreat process, marked by terminal mo-
raines, created easily identifiable clay strata. In order of
deposition they are the Valparaiso, Tinley, Park Ridge,
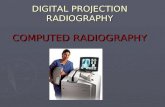
Deerfield, Blodgett, and Highland Park tills [18]. Fig. 4
shows the soil profile at the site of the excavation con-
sidered herein, typical for the downtown area of Chi-
cago. All elevations refer to the Chicago City Datum

-200
-100
0
100
200
0 100 200 300 400
p=(σ1+2σ3)/3
q=σ 1
- σ3
Mohr-Coulombfailure line Shearing
yieldsurfaces
Yield CapSurface
Fig. 5. Hardening-Soil yield surfaces.
-20
-15
-10
-5
0
5
z (m)
Elevation(m CCD)
4.3
0.6-0.3
-4.6
-7.1
-10.8
-15.4
-18.5
Sand / Fill
Clay crust
Soft clay (Layer 1)
Soft-Medium clay (Layer 2)
Medium clay (Layer 3)
Stiff clay (Layer 4)
Very stiff clay
Hard Pan
STRATIGRAPHICUNIT
Blo
dget
tst
ratu
mD
eerf
ield
stra
tum
Park
Rid
gest
ratu
mT
inle
yst
ratu
m
Fig. 4. Subsurface profile.
414 M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425
(CCD), the zero value of which corresponds to the av-
erage level of adjacent Lake Michigan. For the purposes
of the laboratory experimental program, four main
layers were identified in order of increasing depth: the
Upper Blodgett, the Lower Blodgett, the Deerfield, and
the Park Ridge. The laboratory experiments concen-trated on these four normally to lightly overconsolidated
clay layers because they are far more compressible than
the lower Tinley stratum clays, and thus they have the
largest effect on the soil mass response to the excavation.
Note that the Blodgett layer is a supraglacial till and
typically exhibits more variability than the underlying
Table 1
H-S input parameters
Parameter Explanation
Basic parameters
/ Friction angle
c Cohesion
w Dilatancy angle
Eref50 Secant stiffness in standard drained tria
Erefoed Tangent stiffness for primary oedomete
m Power for stress-level dependency of sti
Advanced parameters
Erefur Unloading–reloading stiffness
mur Poisson’s ratio
Rf Failure ratio qf=qak0 k0 value for normally consolidated soil
stratum [18]. In the inverse analysis described herein,
these soil strata are referred to as layers 1, 2, 3, and 4.
4. The H-S model
The soil model used to simulate the clay behavior is
the H-S model as implemented in PLAXIS 7.11. The H-
S model is an elasto-plastic, multi-yield surface, effective
stress soil model. Failure is defined by the Mohr–Cou-
lomb failure criterion. Two families of yield surfaces are
incorporated in the model to account for both volu-
metric and shear plastic strains. Fig. 5 shows the yieldsurfaces of the model in p–q stress space. A yield cap
surface controls the volumetric plastic strains. On this
cap, the flow rule is associative. On the shearing yield
surfaces, increments of plastic strain are nonassociative
and the plastic potential is defined to assure a hyperbolic
stress–strain response for a triaxial compression loading.
The basic characteristics of the model are a Mohr–
Coulomb failure with input parameters c, / and dilat-ancy angle, w, stress-dependent stiffness according to a
Initial estimates
Slope of faillure line in rn � s stress space
y-axis intercept in rn � s stress space
Function of /peak and /failure
xial test y-axis intercept in logðr3=pref Þ � logðE50Þ spacer loading y-axis intercept in logðrv=pref Þ � logðE50Þ spaceffness Slope of trendline in logðr3=prefÞ � logðE50Þ space
default¼ 3Eref50
default¼ 0.2
default¼ 0.9
conditions default¼ 1� sin/

M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425 415
power law defined by input parameter, m, plastic
straining resulting from primary deviatoric loading with
an input parameter, Eref50 , and plastic straining from
primary compression with an input parameter Erefoed.
Elastic unloading–reloading is defined by input param-eters Eref
ur and mur.Table 1 shows the 10 H-S model input parameters,
their meaning and the conventional way of estimating
them. All parameters can be derived from the results of
drained triaxial compression and standard consolidation
tests. The failure parameters / and c are estimated as-
suming a Mohr–Coulomb failure criterion. The dilat-
ancy angle, w, depends on the volume changecharacteristics of the soil and is equal to zero for nor-
mally consolidated clays. The stiffness parameters Eref50 ,
Erefoed, and m are estimated by assuming the values the
50% secant and oedometric stiffnesses (E50 and Eoed,
respectively) are related to a reference pressure, pref ,usually set equal to 100 stress units. The advanced pa-
rameters are generally set equal to their default values.
Hence to begin a problem, one must estimate six pa-rameters for each soil type.
5. Optimization of laboratory data
Triaxial compression tests were performed on sam-
ples from the four most compressible clay layers on the
site of the Chicago Avenue and State Street subwayrenovation project. The triaxial testing program was
part of an experimental laboratory program conducted
to define the soil properties at the excavation site
[19,20]). The H-S model, used to simulate the behavior
of the clay specimens, was calibrated for the four clay
Table 2
Triaxial experimental program
Layer Depth of
samples (m)
Test type Test name Consolidation
stress (kPa)
1 5–6 CID TXC D1 107
D2 200
D3 400
CIU TXC U1 100
2 10.5–11.5 CID TXC D1 134
D2 220
D3 400
CIU TXC U1 130
3 12–13 CID TXC D1 175
D2 350
D3 450
CIU TXC U1 168
4 16.5–17.5 CID TXC D1 200
D2 350
D3 450
CIU TXC U1 204
layers based on these triaxial results using the inverse
analysis procedure presented in [2].
5.1. Experimental program
Table 2 summarizes the isotropically consolidated,
drained, and undrained triaxial compression tests per-
formed on soil samples from each of the four clay layers
considered. Fig. 6 shows the results of these tests. At
every layer, three drained (CID TXC) and one undrained
(CIU TXC) triaxial compression tests were conducted.
The test samples were first consolidated to different iso-
tropic effective stresses, the in situ vertical effective stress(tests D1 and U1) and two significantly higher stresses
(tests D2 and D3), and then sheared until failure. The
principal stress difference, the axial and volumetric
strains, and/or the excess pore pressures were recorded.
As expected for normally to lightly overconsolidated
clays, results of the drained tests show that the devia-
toric stresses and volumetric strains at failure generally
increase with depth at this site where the upper-strataclay samples are ‘‘weaker’’ than lower-strata ones and,
for a given layer, with increasing consolidation pressure.
Note that trends are not as clear for layers 1 and 2 de-
rived from the Blodgett stratum which is typically more
variable than the lower strata. For the undrained tests,
both the deviatoric stress and the excess pore pressures
at failure increase with increasing depth and, thus, in-
creasing effective consolidation pressure.
5.2. Optimization scheme
The observation points used for the inverse analysis
were selected from the stress–strain curves presented in
Fig. 6. The stress–strain curves of the drained test were
discretized by considering one observation point every
2% axial strain up to a maximum of ea ¼ 12%. Curves forthe undrained test were discretized using eight observa-
tion points per curve; the observation points were se-
lected more frequently at small strains, every 0.15% axial
strain up to ea ¼ 0:9%, so that the pore pressure varia-
tion would be adequately defined. Calvello and Finno [2]
showed that this number of observations points was
sufficient to define the stress–strain responses.
The initial values of the H-S input parameters of thefour clay layers were computed according to conven-
tional calibration procedures briefly summarized in
Table 3. The parameters optimized by inverse analysis
were chosen, according to the procedure shown in
Fig. 2, among the six H-S basic parameters. The four
advanced parameters, as suggested by the PLAXIS
manual, were always set equal to their default values.
The four clay layers were calibrated independently.To evaluate the relative importance of each input
parameter, a sensitivity analysis was conducted for the
six parameters at every layer, using the stress–strain

Fig. 6. Experimental results of triaxial tests.
416 M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425
results of the triaxial tests as observations. The results of
these analyses are used to determine the number ofrelevant and uncorrelated parameters in each layer. The
characteristics of the H-S model as implemented in
PLAXIS, the type of observations, and the stress con-
ditions in the soil samples all influence the sensitivity of
the observations to changes in parameter values.
The relevant parameters are discerned based on the
composite scaled sensitivity, cssj:
cssj ¼XNDj¼1
oy 0iobj
� �bjx
1=2ii
� �2�����b
,ND
" #1=2
; ð1Þ
where y 0i is the ith simulated value; bj is the jth esti-
mated parameter; oy0i=obj is the sensitivity of the ithsimulated value with respect to the jth parameter; xjj
is the weight of the ith observation wherein the weight
of every observation is taken as the inverse of its error
variance, and ND is the number of observations. See
[2] for more details concerning x for the laboratory
data and [7] for the inclinometer data. The composite
scaled sensitivities indicate the total amount of infor-
mation provided by the observations for the estima-tion of parameter j and measure the relative
importance of the input parameters being simulta-
neously estimated.

Table 3
Initial and best-fit values of input parameters: laboratory results
Parameter Initial estimate Best-fit value
Layer 1 Layer 2 Layer 3 Layer 4 Layer 1 Layer 2 Layer 3 Layer 4
/a 24.1 27.0 28.9 31.4 23.40 23.50 25.60 32.80
c (kPa)b 0.05 0.05 0.05 0.05 0.05 0.05 0.05 0.05
wb 0 0 0 0 0 0 0 0
Eref50 (kPa)a 2350 3700 4000 11700 4700 7250 6000 8580
Ma 1.00 0.91 1.00 0.94 0.74 0.68 0.85 0.84
The reference pressure is pref ¼ 100 kPa.aOptimized based on regression analysis.b Parameters do not affect predicted results since negligible; values not changed.
M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425 417
The correlated parameters are discerned using the
correlation coefficients, corði; jÞ:
corði; jÞ ¼ covði; jÞvarðiÞ1=2varðjÞ1=2
; ð2Þ
where covði; jÞ equal the off-diagonal elements of the
variance–covariance matrix V ðb0Þ ð¼ s2ðX TxX Þ�1Þ, s2 isthe model error variance, and varðiÞ and varðjÞ refer tothe diagonal elements of V ðb0Þ. The values of corði; jÞindicate the correlation between the ith and jth pa-
rameters. Highly correlated parameters should not be
optimized simultaneously because many combinationscan lead to the same optimized result, but with unre-
alistic values of the optimized parameters. Values close
to )1.0 or 1.0 are indicative of parameters that cannot
be uniquely estimated with the observations used in the
regression.
Fig. 7. H-S input parameters: (a) composite scale
The estimates of parameter Erefoed could not be opti-
mized by inverse analysis because the H-S model im-
plemented in PLAXIS has an internal algorithm that
runs every time a new set of input parameters is speci-
fied. This algorithm considers the deviatoric stress re-sponse of an internally modeled compression test and
‘‘adjusts’’ the values of parameter Erefoed to produce a
hyperbolic curve in a triaxial stress–strain space. The
iterative nonlinear regression method used herein is
based on the value of a sensitivity matrix X ; Xij ¼oyi=obj. Therefore, parameter Eref
oed cannot be included in
the optimization because the regression algorithm would
compute wrong sensitivities every time its value is‘‘corrected’’ by PLAXIS.
Fig. 7 shows that the main parameters that affect the
observations, i.e., those with the higher values of cssj,
are /, Eref50 , and m for all four soil layers. The values of
d sensitivity and (b) correlation coefficients.

CID TXC (D1)
0
100
200
300
400
0 0.05 0.1 0.15
Axial strain
q(k
Pa)
0
0.01
0.02
0.03
0.04
0 0.05 0.1 0.15
Vol
umet
ricst
rain
Experimental Computed (initial) Computed (best-fit)
CID TXC (D2)
0
200
400
600
800
0 0.05 0.1 0.15
Axial strain
q(k
Pa)
0
0.01
0.02
0.03
0.04
0.05
0 0.05 0.1 0.15
Vol
umet
ricst
rain
CIU TXC (U1)
0
50
100
150
200
0 0.01 0.02 0.03 0.04 0.05
Axial strain
q(k
Pa)
020406080
100120
0 0.01 0.02 0.03 0.04 0.05
u exc
ess
(kP
a)CID TXC (D3)
0
200
400
600
800
1000
0 0.05 0.1 0.15
Axial strain
q(k
Pa)
0
0.01
0.02
0.03
0.04
0.05
0 0.05 0.1 0.15
Vol
umet
ricst
rain
Fig. 8. Visual fit between experimental and computed results.
418 M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425
the correlation coefficients, corði; jÞ, for the three pa-
rameters (always lower than 0.75) do not indicate sig-nificant correlation among them. Note that the values of
c and w for a lightly to normally consolidated clay are
expected to be equal to 0, and thus these values would
have no impact on the computed results. The values of cand w are set equal to 0.05 kPa and 0, respectively, and
were not subjected to optimization. As one would ex-
pect, these terms have negligible values of css. The value
of Erefoed was kept constant during the optimization of the
laboratory results, or if outside the valid range, set to the
PLAXIS-suggested value that depends on the values of
parameters Eref50 , E
refur , mur and k0. The results in Fig. 7
suggest that only the failure parameter / and the stiff-
ness parameters, m and Eref50 should be optimized by
inverse analysis.
5.3. Model calibration
Table 3 shows the initial and best-fit values of the six
H-S input parameters for the four clay layers. The initial
estimates were computed according to conventional
calibration methods. Use of the best-fit values mini-mized the errors between the measured data (Fig. 6) and
the computed results; these errors are expressed by the
regression’s objective function, SðbÞ:

Table 4
Values of the objective functions for initial and calibrated laboratory
results
Objective function
From initial estimates From best-fit estimates
Layer 1 990 277
Layer 2 772 141
Layer 3 744 153
Layer 4 993 95
M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425 419
S bð Þ ¼ y�
� y0 bð Þ�Tx y�
� y 0 bð Þ�¼ eTxe; ð3Þ
where b is a vector containing values of the number of
parameters to be estimated; y is the vector of the ob-
servations being matched by the regression; y0ðbÞ is thevector of the computed values corresponding to the
observations; x is the weight matrix; and e is the vectorsof residuals.
Fig. 8 shows the results of the model calibration for
layer 3. The comparison between the measured data andthe computed results for the initial and best-fit estimates
of the input parameters indicates that the final cali-
brated model (best-fit) fits the data better than the model
calibrated by conventional means (initial), particularly
for the undrained results. The calibration by inverse
analysis of the other clay layers (1, 2, and 4) produced a
similar improvement and the ‘‘optimized’’ models al-
ways fit the experimental data better than the ‘‘initial’’models [17]. These visual fits can be quantified by the
values of the objective functions shown in Table 4. Note
that steps 2 and 3 in Fig. 2 were not needed in this
calibration because of the assumption that the triaxial
tests represented an elemental test and only one soil
layer was optimized in a given analysis.
6. Field application: deep excavation
Inverse analysis becomes more complicated when
multiple soil layers and complicated loading paths areencountered in a problem, as is the case when computing
ground movements associated with deep excavations.
To illustrate the logic behind steps 2 and 3 in Fig. 2, the
calibration of the finite element simulation of a sup-
ported excavation is presented herein. The excavation
made to renovate a subway station in downtown Chi-
cago [11] consisted of removing 12.2 m of soft to me-
dium clay within 2 m of a school supported on shallowfoundations. The support system consisted of a secant
pile wall supported by one level of cross-lot bracing and
two levels of tie-backs. Inclinometers were used to re-
cord ground movements developed during construction.
These monitoring data were used as observations in the
inverse analysis that optimized the numerical model of
the excavation.
PLAXIS was used to compute the response of the soil
around the excavation, and Fig. 9 shows a schematic of
the input. The problem was simulated in plane-strain
conditions. The soil stratigraphy was assumed to be
uniform across the site. The figure shows the centralportion of the finite element mesh and the elevations at
the interfaces of the different soil layers. Eight soil layers
were modeled: a fill layer overlaying a clay crust, a
compressible clay deposit consisting of four distinct clay
layers, and a relatively incompressible deposit consisting
of two clay layers. Dolomite is encountered beneath the
hardpan. The fill layer was modeled as an elastic-per-
fectly plastic Mohr–Coulomb material, whereas all clayslayers were modeled the H-S model. The ends of the
mesh extended 50 m from the closest secant pile wall.
The finite element mesh boundary conditions were set
using horizontal restraints for the left and right bound-
aries and total restraints for the bottom boundary.
Lateral movements of the soil behind the secant pile
wall were recorded using five inclinometers. Observa-
tions from two inclinometers on opposite sides of theexcavation were used to compare computed displace-
ments with the field data. The observation points were
retrieved from the field readings of inclinometers 1
(adjacent to the school) and 4, where movements were
essentially planar [11]. Inclinometer 4 was damaged by
construction activities after stage 3, preventing com-
parisons with computed results for the last two stages of
construction.Table 5 shows the calculation phases and the con-
struction stages used in the finite element simulations.
The tunnel tubes and the school adjacent to the exca-
vation were explicitly modeled in the finite element
simulations to take into account the effect of their con-
struction on the soil surrounding the excavation. Stages
1, 2, 3, 4, and 5 refer to the construction stages for which
the computed results are compared to the field data inthe inverse analysis procedure. PLAXIS employs a
penalty formulation so that undrained conditions can be
explicitly modeled. Construction phases not noted as
‘‘consolidation’’ on Table 5 were modeled as undrained.
Consolidation stages were included in the tunnel,
school, and wall installation calculation phases to per-
mit excess pore water pressures to equilibrate. In
PLAXIS, these stages are computed using Biot’s ap-proach. Secant pile wall installation in the field is a
three-dimensional process. To simulate this construction
in the plane strain analysis, elements representing the
wall were excavated and a hydrostatic pressure equiva-
lent to a water level located at the ground surface was
applied to the face of the resulting trench (calculation
phase 13 in Table 5). After computing the movements
associated with this process, the excavated elementswere replaced by elements with the properties of the
secant pile wall (calculation phase 14). More details
about the definition of the finite element problem, the

Fig. 9. Schematic of PLAXIS input.
Table 5
Construction stages for updating model predictions
Calculation
phase
Construction stage
0 Initial conditions – at-rest
conditions
1–4 Tunnel construction (1940)
5 Consolidation stage
6–10 School construction (1960)
11 Consolidation stage
Wall installation 12 Reset displacements (1999)
13 Excavate secant-pile wall
14 Place concrete in wall> stage 1
15 Consolidation stage (20 days)
Excavation 16 Excavate [þ2:75 m] and install
strut> stage 2
17 Excavate [�0:9 m]
18 Prestress first tiebacks> stage 3
19 Excavate [�4:6 m]
20 Prestress second tie-
backs> stage 4
21 Excavate [�7:9 m]> stage 5
420 M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425
calculation phases, and the model parameters used inthe simulation described herein can be found in [17].
6.1. Definition of inverse analysis problem
According to Hill [21], a well-posed regression
problem is one that will converge to an optimal set of
parameter values given reasonable initial values. Given
commonly available data for supported excavations, therequirement of maintaining a well-posed regression will
produce rather simple models with relatively few esti-
mated parameters. Often, however, it is this simple level
of model complexity that can be supported by the data
based on regression methods. Thus, determining the
greatest possible level of model complexity while main-
taining a well-posed regression can be thought of as an
objective analysis of the information provided by thedata. Composite scaled sensitivities and parameter cor-
relation coefficients can be used to define parameters
and to decide which parameters to estimate using re-
gression. To obtain to a well-posed regression one mustuse both (i) objective values such as composite scaled
sensitivities and parameter correlation coefficients and
(ii) good engineering judgment, i.e., whether or not the
optimized parameters are consistent with those expected
based on the geotechnical meaning of the parameters.
The finite element simulation of the excavation was
re-calibrated by inverse analysis at the five construction
stages indicated in Table 5. The soil strata calibrated byinverse analysis are the same ones for which the triaxial
tests were performed. The initial estimates of the input
parameters in this excavation problem for layers 1–4 are
based on the results of the calibration conducted using
the triaxial data (i.e., best-fit values in Table 3). The
procedure described in Fig. 2 was used to determine the
number of parameters to optimize in the inverse analysis
of the excavation.Because four soil layers with five parameters each
may need to be simultaneously optimized in this com-
plicated finite element simulation of the excavation
system, the ‘‘principle of parsimony’’ [21] was applied.
The calibration was conducted by estimating as fewest
number of simulation parameters that together repre-
sented the main features of interest for the problem
studied. Consequently, the problem of ‘‘spreading thedata too thin’’ [8], which occurs when the ratio between
the number of observations available and the number of
parameters estimated is too low, was avoided. For in-
stance, at the first optimization stage, 24 observations
were used in the regression analysis (inclinometer read-
ings on both sides of the excavation at various eleva-
tions). Obviously, the maximum number of parameters
that a regression can estimate is equal to the number ofobservations used. In practice, the number of estimated
parameters had to be significantly lower than the num-
ber of observations because many of the observations
used were redundant (they ‘‘carried’’ the same infor-
mation).

M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425 421
The observations, soil movements, and the many
types of loading paths associated with the excavation
simulation are very different from the stress–strain data
used as observations in the triaxial compression tests
used previously to calibrate the H-S model. Yet, theresults of a sensitivity analysis performed on the H-S
basic parameters indicated that the parameters that are
most relevant to the excavation problem are Eref50 , m, and
/, the same as those found in the results of the cali-
bration based on laboratory data. As before, the values
of c and w had negligible influence on the results, and
Erefoed cannot be optimized in PLAXIS since it may be
internally adjusted.Fig. 10 shows the composite scaled sensitivities of the
three relevant parameters for layers 1–4. The bar chart
refers to sensitivities computed using all the observa-
tions, and the line charts refer to sensitivities computed
from the observations of the different layers. From a
0 10 20 30 40 50
Composite scaled sensitivity
Obs from all layers
Obs from layer 1
Obs from layer 2
Obs from layer 3
Obs from layer 4
Laye
r1
E50
m
Laye
r2
Laye
r3
Laye
r4
E50
m
E50
m
E50
m
Fig. 10. Composite scaled sensitivities of parameter Eref50 , m and / for
layers 1 to 4.
Table 6
Values of correlation coefficients: field study
Correlation coefficients
Between parameters Value Between para
Layer 1 mð1Þ and Eref50ð1Þ �0:70 /ð1Þ and Eref
50ð1ÞLayer 2 mð2Þ and Eref
50ð2Þ �0:85 /ð2Þ and Eref50ð2Þ
Layer 3 mð3Þ and Eref50ð3Þ �0:87 /ð3Þ and Eref
50ð3ÞLayer 4 mð4Þ and Eref
50ð4Þ �0:99 /ð4Þ and Eref50ð4Þ
simulation perspective, results show that the parameters
that most influence the simulation are the ones relative
to layers 1, 3, and 4. Layer 1 is the softest soil layer, thus
its major influence on the displacement results is ex-
pected. Layer 3 is the stratum wherein the excavationbottoms out. Layer 4 is the stiff clay layer below the
bottom of the excavation into which the secant pile wall
is tipped. The high sensitivity values of this stratum in-
dicate that the strength and the stiffness of the clay be-
low the excavation have significant impact on
movements, as one would expect. Fig. 10 also shows
that the observations relative to a soil layer are mainly
influenced by changes in that soil layer’s parameters.For instance, the values of the sensitivities from layers 3
and 4 show a clear ‘‘peak’’, respectively, for the layer 3
and layer 4 input parameters.
Table 6 shows the correlation coefficients between the
three parameters at every layer. The rather high corre-
lation between Eref50 and m indicate that these parameters
are not likely to be simultaneously and uniquely opti-
mized, even though the results of the analysis are sen-sitive to both. Parameter Eref
50 , rather than parameter m,
was chosen to ‘‘represent’’ the stiffness of the H-S model
because changes in Eref50 values also produce changes in
the values of parameters Erefoed (equal to 0.7 times Eref
50 )
and Erefur , thus its calibration can be considered as
‘‘representative’’ of the calibration of all H-S stiffness
parameters.
The results of the sensitivity analysis seem to indicatethat the total number of relevant parameters is 8 (i.e.,
Eref50 and / for layers 1–4). However a final reduction of
the parameters to optimize was necessary to establish a
‘‘well-posed’’ problem where the solution converged.
The stiffness parameters (Eref50 ) were chosen over the
failure parameters (/Þ because the excavation-induced
stress conditions in the soil around this excavation were,
for the most part, far from failure, and the laboratoryestimated values of u are judged to be more accurate
than Eref50 since sampling disturbance affects stiffness
much more than u. Thus, the variations in stiffness pa-
rameters were perceived to be more relevant to the
simulated problem. Note that, when the stiffness and
failure parameters are optimized simultaneously or only
the failure parameters are calibrated, the regression
analysis never converged to geotechnically reasonable
meters Value Between parameters Value
)0.42 mð1Þ and /ð1Þ 0.33
)0.59 mð2Þ and /ð2Þ 0.41
)0.58 mð3Þ and /ð3Þ 0.25
)0.07 mð4Þ and /ð4Þ �0.14

422 M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425
values [17]. This emphasizes the point that convergence
does not necessarily ensure that reasonable results are
attained when optimizing a nonlinear problem such as a
supported excavation in soil. In the spirit of the ‘‘prin-
cipal of parsimony’’, layers 1 and 2 were combined be-cause layer 2 had a much lower impact on the computed
results, as indicated by the low values of composite scaled
sensitivities for this layer in Fig. 10. Further justification
for combining layers 1 and 2 come from the geotechnical
perspective that there was not always a consistent trend
in the stress–strain responses in Fig. 6 and the two layers
are derived from the same geologic stratum.
7. Results
Table 7 shows the parameters that were re-calibrated
at every construction stage. Two parameters per layer,
Eref50 and Eref
oed, were updated by inverse analysis at each
stage. The value of parameter Erefoed, which cannot be
independently estimated by the regression, is related tothe value of parameter Eref
50 .
The simplest way to evaluate the difference between
the results of the simulations based on the initial guess
and the recalibrated parameters is to compare the in-
clinometer data with the computed horizontal dis-
placements for each case. Fig. 11 shows the visual fit
between the observations and the results computed be-
fore (i.e., initial) and after (i.e., best-fit) the calibrationby inverse analysis. The comparison shows that the
initial simulation computes displacements significantly
larger than the measured ones at every construction
stage (the maximum computed displacements at stage 5
are about two times the measured ones) and the com-
puted displacement profiles result in significant and
unrealistic movements in the lower clay layers. When the
model is calibrated by inverse analysis, the fit betweenthe computed and measured response is quite good. At
the end of the construction the maximum computed
displacement exceeds the measured data by less than
10% and the distributions of lateral deformations are
consistent throughout the excavation.
Note that all observations (i.e., stages 1–5) were used
to calibrate the finite element model of the excavation
that produced the good fit shown in Fig. 11. The sim-ulation was calibrated starting at stage 1 and re-cali-
brated at every subsequent construction stage using the
inclinometer data available up to that stage.
Table 7
Parameters recalibrated by inverse analysis: field study
Layers Parameters optimized Related parameters
1 and 2 E1=2 ¼ Eref50 Eref
oed ¼ 0:7Eref50
3 E3 ¼ Eref50 Eref
oed ¼ 0:7Eref50
4 E4 ¼ Eref50 Eref
oed ¼ 0:7Eref50
Table 8 shows the initial and optimized values of the
Eref50 values at the different optimization stages. The
maximum changes in parameter values occur at stage 1
when the observations relative to the installation of the
secant-pile wall are used. Subsequent calibrations re-sulted in parameters that only changed slightly at later
stages. By the end of stage 3 the model essentially is
calibrated. Indeed, the values of the optimized input
parameters do not change after that stage, indicating
that the observations at stages 4 and 5 ‘‘match’’ the
computed results of the model calibrated at stage 3.
Further improvement in the fit of the model is neither
possible nor necessary. In fact, most improvement oc-curred after the first optimization stage after the secant
pile wall was installed. While as much as 10 mm of
lateral movement in the clays occurred during this stage
(Fig. 11), one must remember that the tunnel and school
construction were also simulated so as to obtain rea-
sonable estimates of the ‘‘initial’’ stresses in the ground
before the wall was installed. Because of the proximity of
the tunnel, one would not expect at-rest in situ stresses,and hence the simulation included steps for tunnel and
school construction as noted in Table 5.
To illustrate the impact these activities had on the
ground conditions, contours of equivalent shear strain
computed after the wall was installed (calculation phase
14 in Table 5) are presented in Fig. 12. The shear strains
were as large as 4% in all four of the clay layers that
were optimized. These strains were large enough to‘‘exercise’’ the model so that the parameters could be
optimized. Recall that both stiffness, reflected by Eref50 ,
and failure, reflected by u, parameters were shown in
Fig. 10 to be important at these relatively large strain
levels. Note that Calvello and Finno [22] showed that
when the tunnel and school construction were not in-
cluded in the simulation, while the computed displace-
ments matched the observed values after optimization,the optimized Eref
50 values did not make increase with
depth and hence did not make sense from a geotechnical
viewpoint. These results emphasize the important point
that one must consider all factors that affect the stresses
in the soil to have a meaningful result based on inverse
analysis.
Results in Table 8 also show that the initial estimates
of the stiffness parameters based on the laboratory dataare significantly lower than the optimized values based
on the field performance data. At stage 1, the changes in
parameters for layers 1 and 2 are smaller than those for
layers 3 and 4. Layers 1 and 2 are subjected to larger
displacements, and hence strains, than the deeper layers
(see Fig. 11). This trend suggests that the estimation of
the parameters affecting the smaller strain responses
applicable to layers 3 and 4 is more difficult than esti-mation of the parameters at larger strains applicable to
layers 1 and 2, at least with the H-S model. The observed
trends in parameter changes reflect that fact that accu-

EA
ST
sid
eW
ES
Tsi
de
Stage 4 Stage 5Stage 1 Stage 2 Stage 3
-20
-15
-10
-5
0
0 20 40 60displacement (mm)
Ele
vatio
n(m
CC
D) 1
Layers
2
3
4
-20
-15
-10
-5
0
0 20 40 60displacement (mm)
-20
-15
-10
-5
0
0 20 40 60displacement (mm)
-20
-15
-10
-5
0
0 20 40 60displacement (mm)
-20
-15
-10
-5
0
0 20 40 60diplacement (mm)
-20
-15
-10
-5
0
0 20 40 60
Ele
vatio
n(m
CC
D)
-20
-15
-10
-5
0
0 20 40 60
-20
-15
-10
-5
0
0 20 40 60
Field data
Computed displacements (initial)
Computed displacements (best-fit)
1
2
3
4
Layers
Fig. 11. Measured vs. computed horizontal displacements for initial and best-fit estimates of parameters.
M.Calvello
,R.J.Finno/Computers
andGeotech
nics
31(2004)411–425
423

Table 8
Best-fit values of reference moduli at various optimization stages: field
study
E1=2 (kPa) E3 (kPa) E4 (kPa)
Initial 288 288 413
Stage 1 306 862 2031
Stage 2 327 841 2112
Stage 3 362 752 2573
Stage 4 362 752 2573
Stage 5 362 752 2573
5/Initial 1.3 2.6 6.2
The reference pressure is pref ¼ 100 psf¼ 4.8 kPa.
424 M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425
rately estimating stiffness at small strains via laboratory
testing is not possible when defining response via global
measures of strains in a conventional triaxial apparatus,
but better results can be achieved at larger strains.Sample disturbance would have a larger effect on the
secant moduli at smaller strains than at larger strains,
the same trend that is exhibited in the results. Further-
more, as the excavation deepens, ratio of the length of
the wall to the depth of the cut becomes smaller and
departs from plane strain conditions. The stiffening ef-
fect of the corner of the excavation cannot be accom-
modated in a plane strain simulation, except byincreasing the stiffness of the soil [7]. Both these factors
contributed to the amount of change observed in the
optimized parameters.
Fig. 12. Shear strain distributio
8. Conclusions
The inversemodeling procedure described in this paper
combines a finite element analysis and a parameter opti-
mization algorithm to efficiently calibrate a soil model byminimizing the errors between experimental observations
and computed responses. Based on the results presented
herein, the following conclusions can be drawn:
1. Inverse analysis can be effectively used to calibrate a
numerical soil model based on triaxial experimental
results. When the relevant and uncorrelated H-S in-
put parameters were updated using an automated re-
gression algorithm, the computed results fit theexperimental data (relative to four different clay lay-
ers) better than the initially calibrated models.
2. A good understanding of the problem is necessary to
define an adequate optimization scheme when dealing
with a finite element simulation of a geotechnical pro-
ject (e.g., supported excavation), which involves the
calibration of multiple soil layers. Important factors
include the number of parameters to be optimized,equal to the number of model parameters times the
number of soil layers, number of observations avail-
able, and the type of system being analyzed. Statistics
that are generated by inverse analysis techniques,
such as composite scaled sensitivity and correlation
coefficients, are helpful in reducing the number of rel-
evant parameters to manageable levels.
n after wall installation.

M. Calvello, R.J. Finno / Computers and Geotechnics 31 (2004) 411–425 425
Of course, if the constitutive model does not ade-
quately represent the important stress–strain responses
in the field problem, then convergence to realistic soil
parameters is not possible.
Acknowledgements
This work was supported by funds from Grant CMS-
0115213 from the National Science Foundation. The
support of Dr. Richard Fragaszy, the cognizant pro-
gram manager, is greatly appreciated.
References
[1] Zentar R, Hicher PY, Moulin G. Identification of soil parameters
by inverse analysis. Comput Geotech 2001;28:129–44.
[2] Calvello M, Finno RJ. Calibration of soil models by inverse
analysis. In: Proceedings of the International Symposium on
Numerical Models in Geomechanics, NUMOG VIII, Balkema;
2002. p. 107–16.
[3] Peck RB. Deep excavations and tunneling in soft ground. In:
Proceedings of the 7th International Conference on Soil Mechanics
and Foundation Engineering, State-of-the-Art; 1969. p. 225–90.
[4] Morgenstern N. Managing risk in geotechnical engineering. In:
Proceedings of the 10th Pan American Conference on Soil
Mechanics and Foundation Engineering, vol. 4; 1995.
[5] Whitman RV. Organizing and evaluating uncertainty in geotech-
nical engineering. J Geotech Geoenviron Eng ASCE
1996;126(7):583–93.
[6] Ou CY, Tang YG. Soil parameter determination for deep excava-
tion analysis by optimization. J Chin Inst Eng 1994;17(5):671–88.
[7] Finno RJ, Calvello M. Supported excavations: the observational
method and inverse modeling. J Geotech Geoenviron Eng ASCE
2004, in press.
[8] Poeter EP, Hill MC. Inverse methods: a necessary next step in
groundwater modeling. Ground Water 1997;35(2):250–60.
[9] Keidser A, Rosjberg D. A comparison of four inverse approaches
to groundwater flow and transport parameter identification.
Water Resour Res 1991;27(9):2219–32.
[10] Schanz T, Vermeer PA, Bonnier PG. The Hardening Soil model –
formulation and verification. In: Proceedings Plaxis Symposium
‘‘Beyond 2000 in Computational Geotechnics, Amsterdam, Balk-
ema; 1999. p. 281–96.
[11] Finno RJ, Bryson LS, Calvello M. Performance of a stiff support
system in soft clay. J Geotech Geoenviron Eng ASCE
2002;128(8):660–71.
[12] Duncan JM. Hyperbolic stress–strain relationships. In: Yong RN,
Ko H-Y, editors. Proceedings, Limit Equilibrium, Plasticity and
Generalized Stress–Strain in Geotechnical Engineering. McGill
University; 1980. p. 443–60.
[13] Wroth CP, Houlsby GT. A critical state model for
predicting the behavior of clays. In: Yong RN, Ko H-Y,
editors. Proceedings, Limit Equilibrium, Plasticity and Gen-
eralized Stress–Strain in Geotechnical Engineering. McGill
University; 1980. p. 592–627.
[14] Dafalias YF, Herrmann LR, DeNatalie JS. description of
natural clay behavior by a simple bounding surface plastic-
ity formulation. In: Yong RN, Ko H-Y, editors. Proceed-
ings, Limit Equilibrium, Plasticity and Generalized
Stress–Strain in Geotechnical Engineering. McGill University;
1980. p. 711–44.
[15] Poeter EP, Hill MC. Documentation of UCODE, a computer
code for universal inverse modeling. US Geological Survey Water-
Resources Investigations Report 98–4080; 1998. 116 pp.
[16] Brinkgreve RBJ, Vermeer PA. Finite element code for soil and
rock analysis. PLAXIS 7.0 manual. Balkema; 1998.
[17] Calvello M. Inverse analysis of supported excavations through
Chicago glacial clays. PhD Thesis, Northwestern University,
Evanston, IL; 2002.
[18] Chung CK, Finno RJ. Influence of depositional processes on the
geotechnical parameters of chicago glacial clays. Eng Geol
1992;32:225–42.
[19] Roboski J. Soil parameters for constitutive models of compress-
ible chicago glacial clays. MS Thesis, Northwestern University,
Evanston, IL; 2001.
[20] Kawamura K. Hardening-Soil parameters for compressible Chi-
cago glacial clays. MS Thesis, Northwestern University, Evans-
ton, IL; 1999.
[21] Hill MC. Methods and guidelines for effective model calibration.
US Geological Survey Water-Resources Investigations Report 98–
4005; 1998. 90 pp.
[22] Calvello M, Finno RJ. Ital Geotech J 2003;37(4):9–23.

本文献由“学霸图书馆-文献云下载”收集自网络,仅供学习交流使用。
学霸图书馆(www.xuebalib.com)是一个“整合众多图书馆数据库资源,
提供一站式文献检索和下载服务”的24 小时在线不限IP
图书馆。
图书馆致力于便利、促进学习与科研,提供最强文献下载服务。
图书馆导航:
图书馆首页 文献云下载 图书馆入口 外文数据库大全 疑难文献辅助工具