seg2012427.pdf

of 5
Transcript of seg2012427.pdf
-
7/23/2019 seg2012427.pdf
1/5
Inversion after depth imagingRobin P. Fletcher*, Stewart Archer, Dave Nichols, and Weijian Mao, WesternGeco
Summary
In many areas, depth imaging of seismic data is required toconstruct an accurate view of the reservoir structure. This isespecially true in areas of complex geology and areas with
salt tectonics. Having identified the reservoir structure, weof course want to extract further information on lithology,
reservoir quality, and fluids. This can be achieved byseismic amplitude variation with offset (AVO) inversion.
Traditionally, depth-imaged data are inverted by convertingit back into the time domain to enable the seismic data to berepresented by convolution with a consistent wavelet,varying only slowly with both time and spatial location. We
will describe an alternate approach that allows us to invertthe seismic data directly in the depth domain, where it has
been correctly located by the depth imaging. This approachalso allows us to account for the variability in the image
amplitudes that arise due to the complex geology and thespatial variations in the acquisition geometry.This new approach to inversion is demonstrated onsynthetic model data, and compared with results obtained
from conventional time-domain inversion.
Introduction
Conventional amplitude inversion assumes that the inputmigrated image has preserved relative amplitudeinformation and is free from the effects of illumination.
Under this assumption, stretching a depth-migrated image
back to time and applying inversion based on 1Dconvolutional modeling can produce reasonable results.
However, illumination effects in complex geologicalsettings (such as shadow zones in subsalt imaging) pose achallenge to even the most advanced imaging algorithms
such as reverse-time migration (RTM). Traditionalapproaches to compensate for illumination effects in
migrated images are difficult to regularize in areas of verypoor illumination.
We propose a technique for performing amplitude
inversion directly in the depth domain throughincorporating a measure of how well the migrationalgorithm (or possibly a processing workflow) acts as an
inverse to the Earths response that we acquire. Afteroutlining the underlying theory, we compare our newmethod with conventional time-domain inversion on asynthetic example representative of subsalt inversion usingRTM.
Method
Traditional approaches to migration/inversion regard therecorded data, d, as the result of a linear modeling operator,M, applied to the reflectivity model, r. This can be either a
discrete or continuous (integral) operator. The least-squaresinverse to this problem is
, *1* dMMMr (1)
where M*, the adjoint of modeling, is the migration
operator. The true model and the migrated image I=M*dare related through
,I Hr (2)
where the Hessian operator, H=M*M, can be thought of asdemigration followed by migration, and is often thought of
as a measure of illumination that reflects the effects ofvelocity variation and the acquisition footprint. If we relaxthe requirement that the modeling operator and themigration operator are related to each other, then the
operator His still considered as an operator that blurs thetrue reflectivity model to give the image.
We define a 3D earth model m as the elastic properties
(such as acoustic impedance, vp/vsratio, and density), andrepresent the (possibly non-linear) plane wave reflectivity
calculation as r=R(m). To invert for the best model, asimulated image, HR(m), is compared with the original
image, I, and the model is updated to derive the model withan image that best fits the data. We define the objectivefunction to be minimized as
,2
1
I2
1
)(
2
02
1
2
21
mmC
mHRC
mRm
m
d
ppJ
(3)
where Cd is the data covariance operator, m0 is a priormodel, Cm is the model covariance operator, and p is the
Lp-norm parameter. The parameter is the weighting
parameter that determines the relative amount of sparsenessthat can be brought into the inversion.
2 12 SEG
EG Las Vegas 2 12 Annual Meeting Pa
http://../EXABS12.PDF -
7/23/2019 seg2012427.pdf
2/5
Inversion after depth imaging
The first term in equation 3 minimizes the Lp-norm of thereflectivity. Choosing a p value close to 1.0 introducessparseness into the reflectivity model as is often used in this
type of optimization (Oldenburg et al., 1983; Ma, 2002).
The second term minimizes the error of fit to the data andthe third term minimizes the changes made to the priormodel, typically built from well information and the
migration velocity model. The model and data covariancespecification, together with ,control the relative weightsof these three terms in the final model selection.
A further requirement is that the final model update variessmoothly spatially with the geologic structure. This isachieved by applying local directional smoothing as a
preconditioner to the earth model. To achieve faster
convergence at early iterations, and because we were notexpecting to formally minimize equation 3, we decided tofollow this shaping regularization approach (Fomel, 2007),rather than explicitly incorporating a penalty term in the
objective function. The dip field used to drive the localdirectional smoothing is estimated from the migratedimage. This dip field is also used in the reflectivityoperator, R(), calculation.
As equation 3 contains an Lp-norm as well as a possiblynon-linear reflectivity operator, we choose to minimizeequation 3 using a non-linear conjugate gradient algorithm
(NLCG) or the limited-memory Broyden-Fletcher-Goldfarb-Shanno (BFGS) algorithm of Nocedal (1980).
Examples
A poststack inversion was applied to synthetic data fromthe constant-density Sigsbee2A model, and compared to theresults of conventional inversion. The Sigsbee2A model
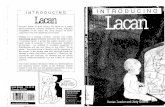
(Figure 1a) and data are made available by the SMAARTconsortium. It is described as representative of ageologic setting found on the Sigsbee escarpment in thedeep water Gulf of Mexico and having illumination
problems due to the complex salt shape with rugose salt topfound in this area resulting in sub-salt structure that isdifficult to image.
Figure 2(a) displays the prestack RTM image using themigration velocity model displayed in Figure 1(b). Theimage clearly shows lateral variability in image amplitudeand quality beneath the salt where the velocity model does
not indicate any corresponding changes in geology. Notethat there are point reflectors added to this model in thesubsalt sediments at two depth levels. These also show thelateral variability in the subsalt image.
Our estimate of the Hoperator is obtained by demigrationfollowed by the prestack RTM workflow applied to point
diffractors. The demigration is based on the same modelingkernel used in the RTM algorithm. The response ofdemigration-remigration of a single point diffractor is
known as the point spread function (PSF). PSFs based on
raytracing are described by Lecomte (2008) and are oftenused in acquisition survey design. Figure 2(b) displays ourtwo-way wave-equation modeling-based PSFs computed
for a regular grid of point diffractors simultaneously. Thereis significant lateral variability in the PSFs subsalt.
These PSFs are cut out from the image and interpolated
spatially on the fly during application of the Hoperator(i.e., non-stationary convolution with the PSFs). For ourcurrent estimate of the model, we compute the reflectioncoefficient at each depth sample, multiply by the PSF for
each location, and then sum them to give the forwardmodeled image. For locations where we did not compute aPSF, we interpolate one from the surrounding PSFs.
Poststack inversion of this image was computed using twoconventional inversion processes: simultaneous seismicinversion (Rasmussen et al., 2004) and sequential seismicinversion (Poggliagliomi and Allred, 1994) for comparison
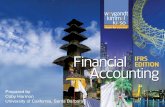
with the proposed inversion algorithm outlined above.Figure 3 shows the data used for this comparison (Figures3a and 3b) and compares the results of the three inversionapproaches. Figures 3(c) to 3(f) show the acoustic
impedance after subtraction of a smooth backgroundmodel. The new inversion (Figure 3d) shows morecontinuous reconstruction of the model than either of theconventional inversions. The simultaneous inversion
(Figure 3f) method is similar to the new workflow, with themain difference being that it uses a 1D spatially invariant
(or perhaps slowly varying) wavelet in the time domain.This clearly prevents this inversion from recovering thetrue reflectivity from zones where the image amplitudes are
distorted. Both of these methods use the same smooth priormodel. The sequential inversion (Figure 3e) uses a priormodel based on extrapolation of well data to determine thescalar for the contribution of the seismic data to the
inversion result. In this case we used the assigned welllocation shown in Figure 3(a), along with horizon picksfrom the structural image to compute the prior model. Thisallows better recovery of the true reflectivity for this
method, although it relies heavily on constructing anaccurate prior model. The new inversion shows betterrecovery of the model through the weak image zone thaneither of the other two inversion methods. This new
approach uses the measured response of the seismicimaging workflow, the PSFs, so it relies less onassumptions on the lateral stability of the data or theaccuracy of the prior model.
2 12 SEG
EG Las Vegas 2 12 Annual Meeting Pa
http://../EXABS12.PDF -
7/23/2019 seg2012427.pdf
3/5
Inversion after depth imaging
Discussion and conclusions
We propose an alternative approach to applying
conventional inversion based on 1D convolutional
modeling, after depth imaging. We invert seismic datadirectly in the depth domain, accounting for illuminationeffects in the image by replacing the 1D wavelet in
conventional inversion with the point spread function of thedepth imaging processing. The synthetic example we
presented inverted an RTM image using PSFs generatedfrom finite-difference wave-equation propagation.
However, the inversion algorithm could be applied usingPSFs (or a complete calculation of the Hessian) and imagesgenerated using other cheaper propagators for geologiesthat do not warrant a full wave solution. Even in simple
models, the ability to perform inversion directly in thedepth domain, rather than converting vertically to time and
having to estimate a consistent wavelet, may be worth theincrease in computational effort. Applied on field data,matching filters will be required to calibrate the forward
modeled image with measurements from available wells.
Whilst we have shown an example of poststack acousticimpedance inversion, the extention of this workflow to
perform AVO inversion of angle stacked depth images is
under investigation.
Acknowledgments
The authors thank WesternGeco for permission to publishthis work as well as James Rickett and Irina Marin forvaluable contributions and discussion.
(a) (b)
Figure 1: Sigsbee2A model (a) stratigraphic velocity, (b) migration velocity.
(a) (b)
Figure 2: (a) Prestack reverse-time migration image, (b) Point spread functions.
2 12 SEG
EG Las Vegas 2 12 Annual Meeting Pa
http://../EXABS12.PDF -
7/23/2019 seg2012427.pdf
4/5
Inversion after depth imaging
(a) (b)
(c) (d)
(e) (f)
Figure 3: Detailed zone of inversion. (a) the image, (b) PSFs, (c) true model acoustic impedance (after removing the background priormodel), (d) depth domain inversion, (e) sequential inversion and (f) simultaneous inversion.
2 12 SEG
EG Las Vegas 2 12 Annual Meeting Pa
http://../EXABS12.PDF -
7/23/2019 seg2012427.pdf
5/5
EDITED REFERENCES
Note: This reference list is a copy-edited version of the reference list submitted by the author. Reference lists for the 2012
SEG Technical Program Expanded Abstracts have been copy edited so t hat references provided with the online metadata for
each paper will achieve a high degree of linking to cited sources that appear on the Web.
REFERENCES
Fomel, S., 2007, Shaping regularization in geophysical estimation problems: Geophysics, 72, no. 2, R29R36.
Lecomte, I., 2008, Resolution and illumination analyses in PSDM: A ray -based approach: The LeadingEdge, 27, 650663.
Ma, X-Q., 2002, Simultaneous inversion of prestack seismic data for rock properties using simulatedannealing: Geophysics, 67, 18771885.
Nocedal, J., 1980, Updating quasi-Newton matrices with limited storage: Mathematics of Computation,95, 339353.
Oldenburg, D. W., T. Scheur, and S. Levy, 1983, Recovery of the acoustic impedance from reflection
seismograms: Geophysics, 48, 13181337.Poggliagliomi, E., and R. D Allred, 1994, Detailed reservoir definition by integration of well and 3 -D
seismic data using space adaptive wavelet processing: The Leading Edge, 13, 749753.
Rasmussen, K. B., A. Bruun, and J. M. Pedersen, 2004, Simultaneous seismic inversion: 66th Conferenceand Exhibition, EAGE, Extended Abstracts, P165.
2 12 SEG
EG Las Vegas 2 12 Annual Meeting Pa
http://../EXABS12.PDF