Search Problems Russell and Norvig: Chapter 3, Sections 3.1 – 3.3 Slides adapted from:...
30
Search Problems Search Problems Russell and Norvig: Chapter 3, Sections 3.1 – 3.3 Slides adapted from: robotics.stanford.edu/~latombe/cs121/200 3/home.htm by Prof. Jean-Claude Latombe
-
date post
19-Dec-2015 -
Category
Documents
-
view
222 -
download
3
Transcript of Search Problems Russell and Norvig: Chapter 3, Sections 3.1 – 3.3 Slides adapted from:...
Search ProblemsSearch Problems
Russell and Norvig: Chapter 3, Sections 3.1 – 3.3
Slides adapted from:robotics.stanford.edu/~latombe/cs121/2003/home.htmby Prof. Jean-Claude Latombe

Why Search?
In many tasks, we know what a solution looks like, but do not have an algorithm that produces a solution. Goal + preferences
Search is a general problem solving technique for this kind of situations. Search Problem: Input: Initial State + Goal (utility) + actions
(state transitions) Output: A sequence of actions to reach the
goal.
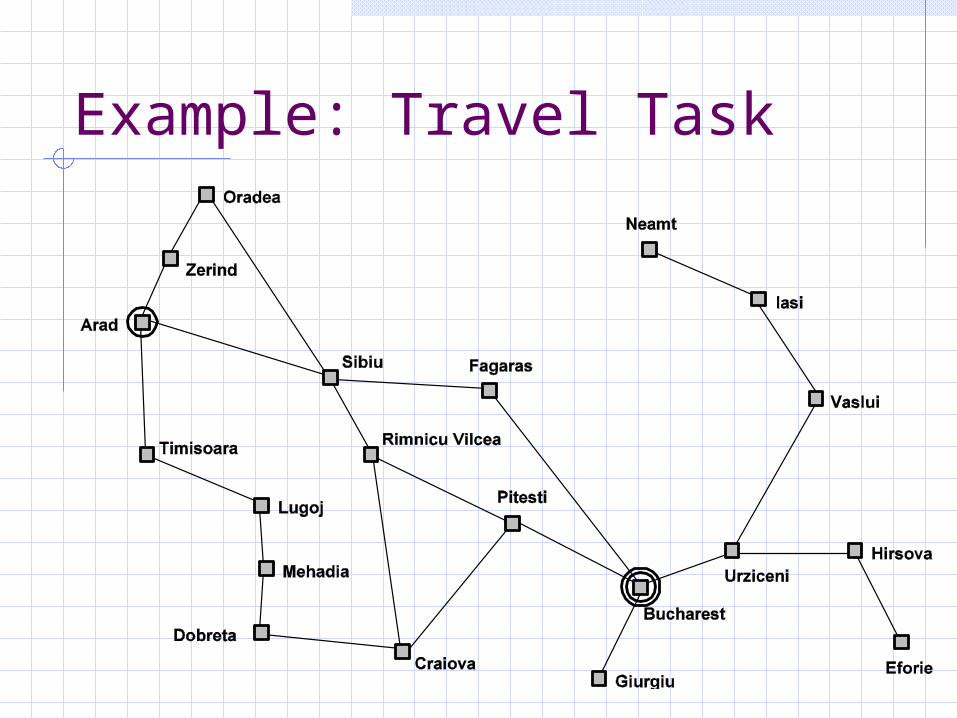
Example: Travel Task

Clean House Task
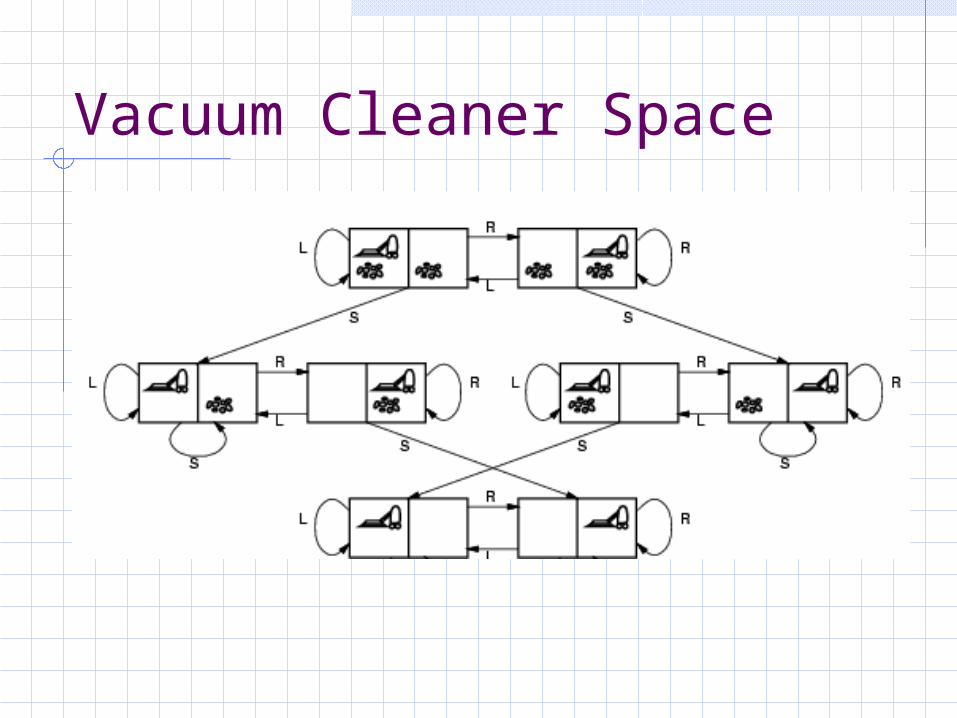
Vacuum Cleaner Space

Search ProblemSearch Problem
State space Initial state Successor function Goal test Path cost
Example: 8-queensExample: 8-queens
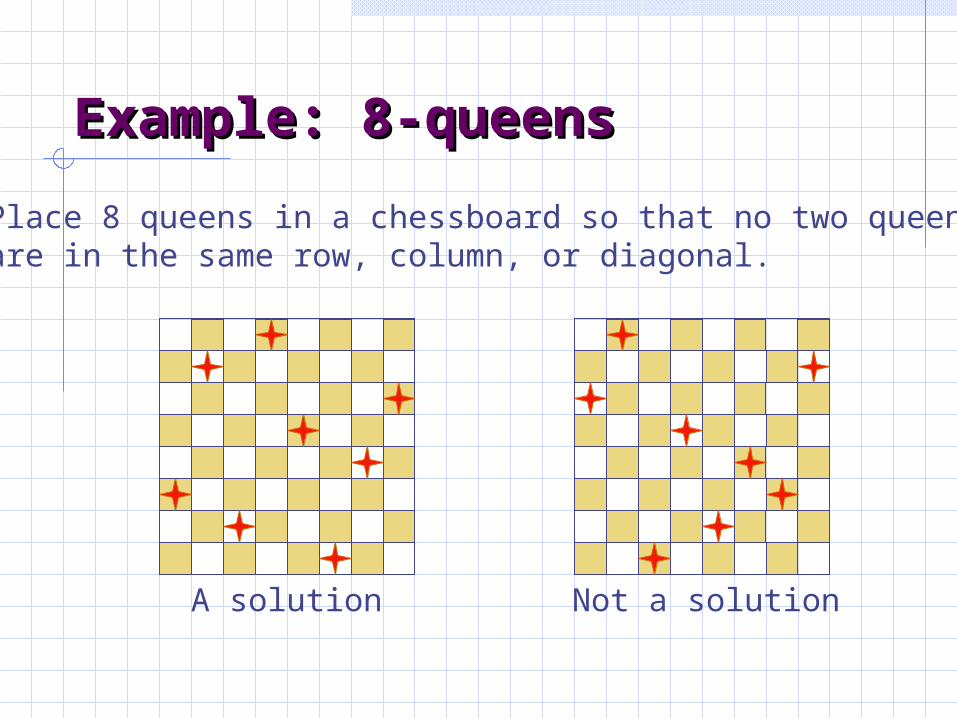
Place 8 queens in a chessboard so that no two queens are in the same row, column, or diagonal.
A solution Not a solution
Example: 8-queensExample: 8-queens
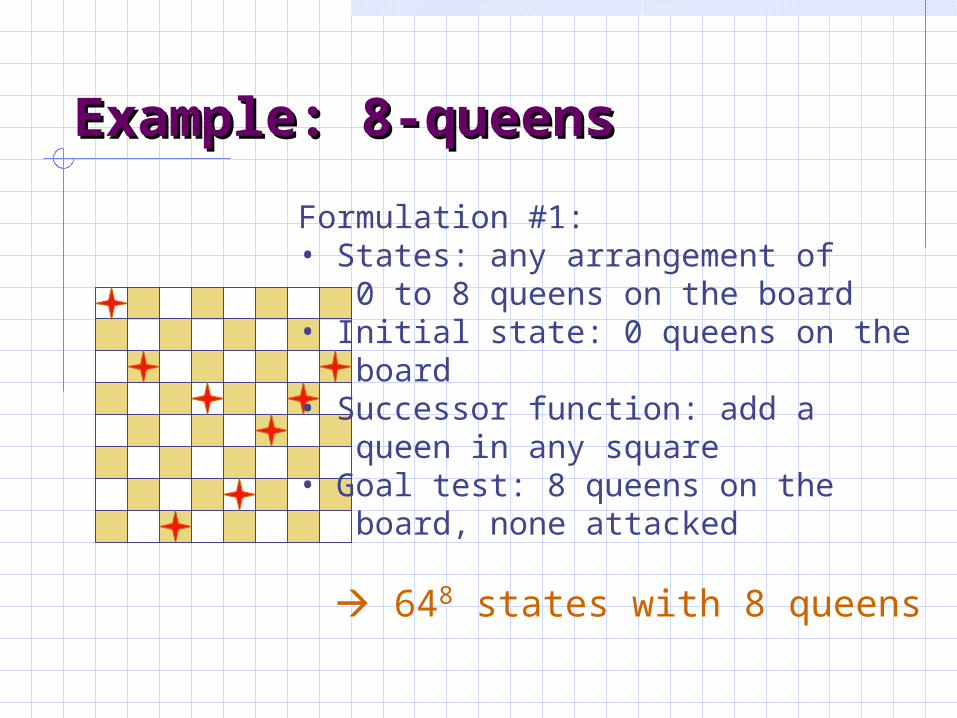
Formulation #1:• States: any arrangement of 0 to 8 queens on the board• Initial state: 0 queens on the board• Successor function: add a queen in any square• Goal test: 8 queens on the board, none attacked
648 states with 8 queens

Example: 8-queensExample: 8-queensFormulation #2:• States: any arrangement of k = 0 to 8 queens in the k leftmost columns with none attacked• Initial state: 0 queens on the board• Successor function: add a queen to any square in the leftmost empty column such that it is not attacked by any other queen• Goal test: 8 queens on the board
2,067 states
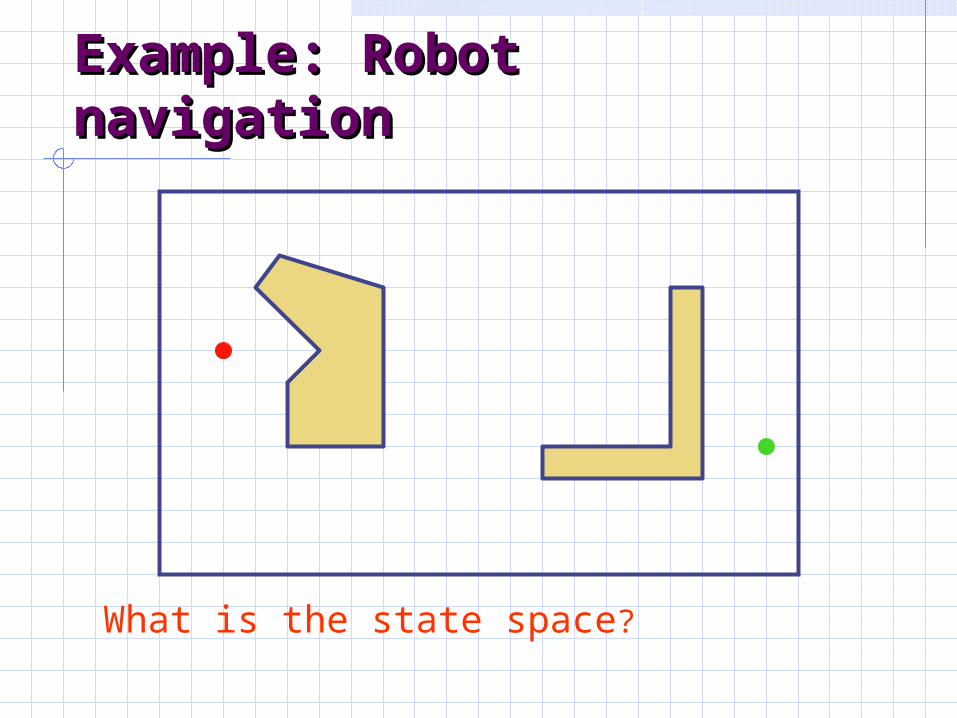
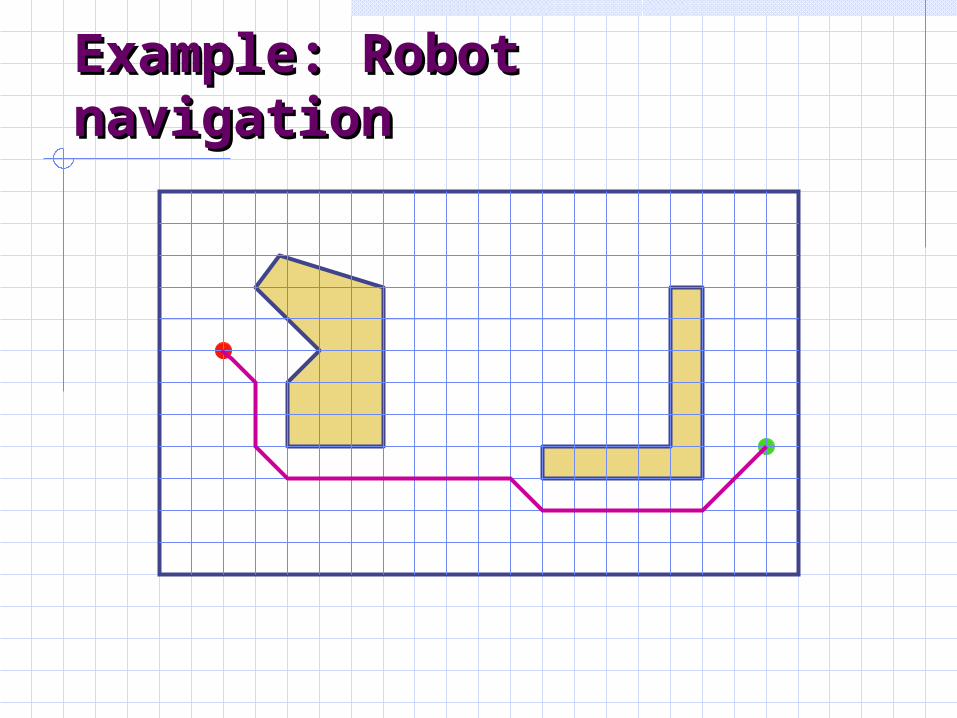
Example: Robot Example: Robot navigationnavigation
What is the state space?
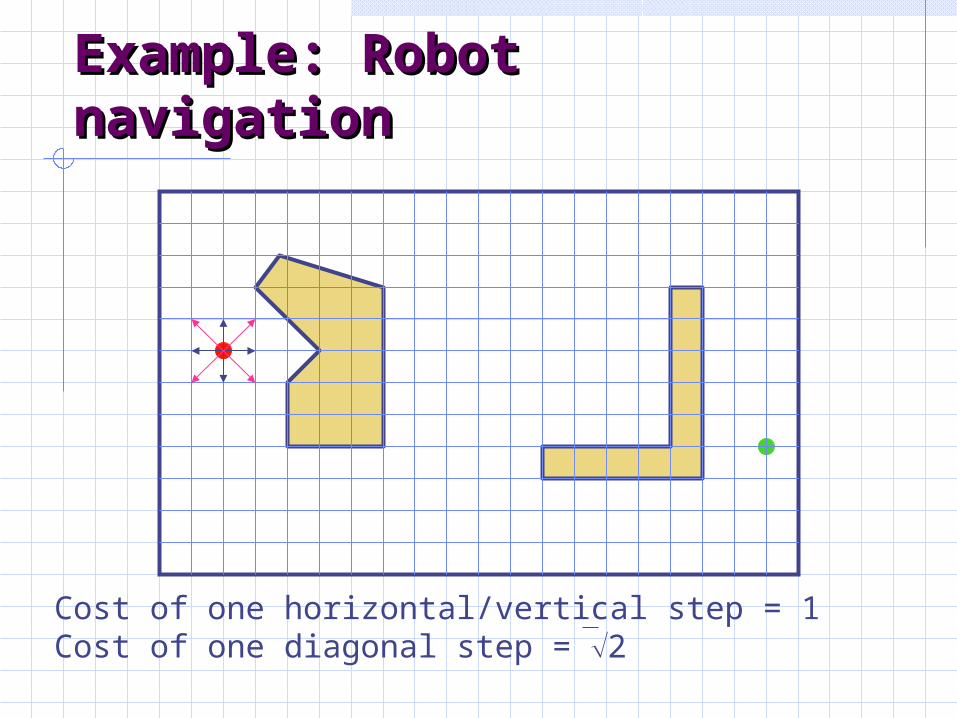
Example: Robot Example: Robot navigationnavigation
Cost of one horizontal/vertical step = 1Cost of one diagonal step = 2
Example: Robot Example: Robot navigationnavigation

Example: Robot Example: Robot navigationnavigation

Example: Robot Example: Robot navigationnavigation
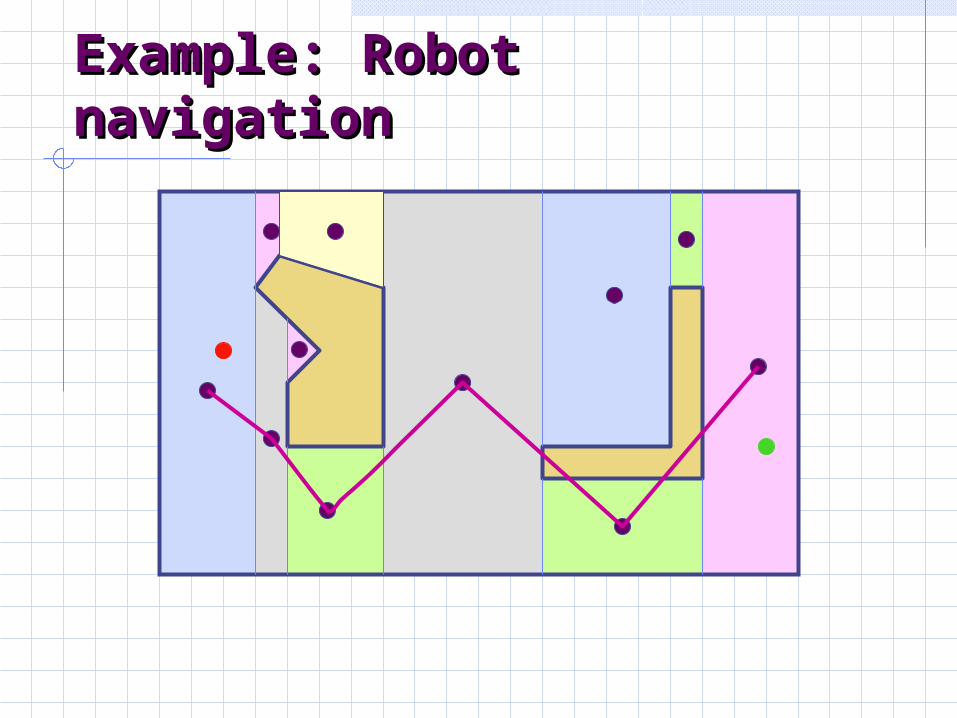
Cost of one step = ???
Example: Robot Example: Robot navigationnavigation

Example: Robot Example: Robot navigationnavigation
Example: Robot Example: Robot navigationnavigation
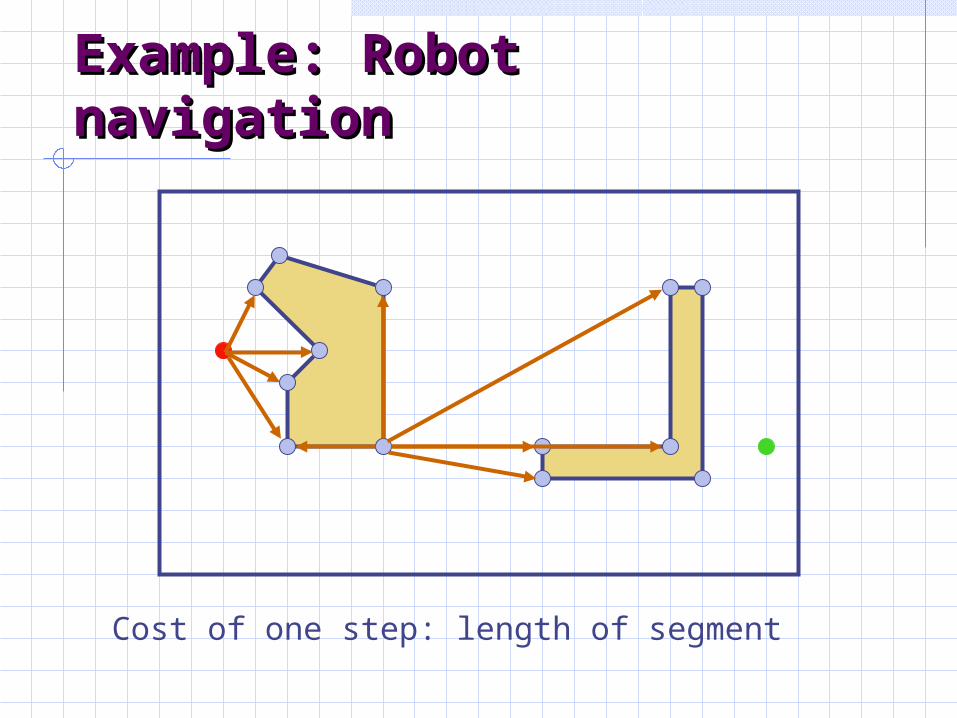
Cost of one step: length of segment

Example: Robot Example: Robot navigationnavigation

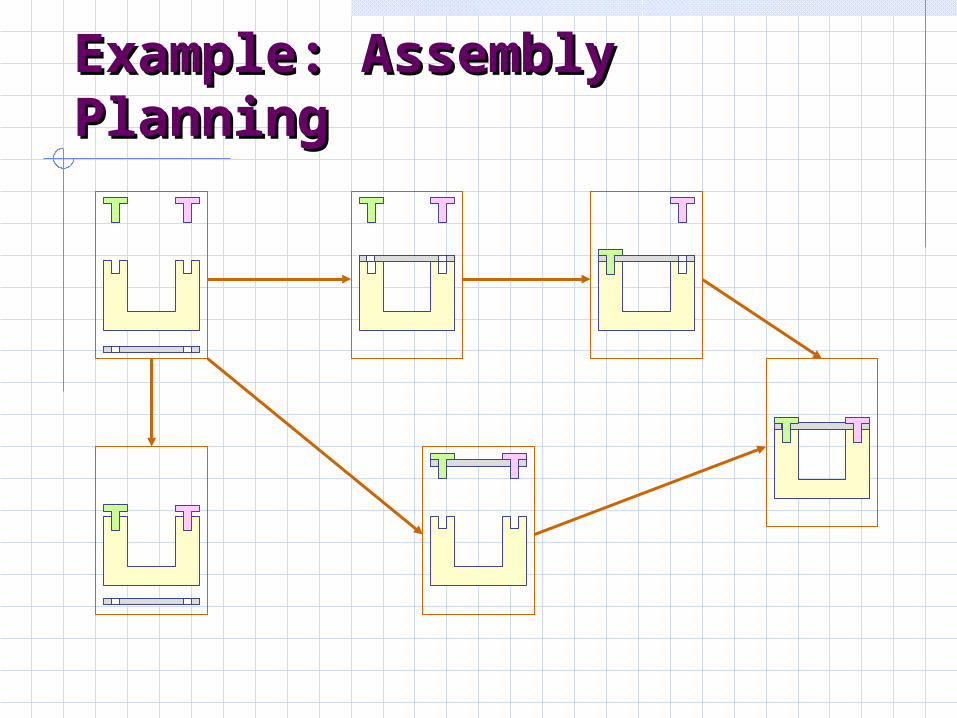
Example: Assembly Example: Assembly PlanningPlanning
Initial state
Goal state
Successor function:• Merge two subassemblies
Complex function:it must find if a collision-freemerging motion exists

Example: Assembly Example: Assembly PlanningPlanning
Example: Assembly Example: Assembly PlanningPlanning

Assumptions in Basic Assumptions in Basic SearchSearch
The environment is staticThe environment is discretizableThe environment is observableThe actions are deterministic
open-loop solution

Search Problem Search Problem FormulationFormulation
Real-world environment Abstraction Validity:
Can the solution be executed?
Search Problem Search Problem FormulationFormulation
Real-world environment Abstraction Validity:
Can the solution be executed? Does the state space contain the solution?
Usefulness Is the abstract problem easier than the real-
world problem?
Without abstraction an agent would be swamped by the real world
Search Problem VariantsSearch Problem Variants
One or several initial states One or several goal states The solution is the path or a goal node In the 8-puzzle problem, it is the path to
a goal node In the 8-queen problem, it is a goal node
Any, or the best, or all solutions
Multi-state Search
In vacuum problem, what if we don’t have sensors to tell us whether the floor is clean or not, and which room are we in?

Important ParametersImportant Parameters
Number of states in state space Size of memory needed to store a state Running time of the successor function
ApplicationsApplications
Route finding: airline travel, telephone/computer networks Pipe routing, VLSI routing Pharmaceutical drug design Robot motion planning Video games

SummarySummary
Problem-solving agent State space, successor function, search Examples: Travel Task, house cleaning, 8-queens, robot navigation, assembly planning Assumptions of basic search Important parameters