
sdimecc/mat70/MAT70/Welcome_files/BoA.pdf · Rua S´ergio Buarque de Holanda, 651. Cidade...
78
Transcript of sdimecc/mat70/MAT70/Welcome_files/BoA.pdf · Rua S´ergio Buarque de Holanda, 651. Cidade...



MAT70 ≠ VI Workshop on Dynamical Systems
Welcome
It is a pleasure to welcome you to Campinas for the VI Workshop on DynamicalSystems to celebrate the 70th birthday of Marco Antonio Teixeira. We hope you
will take advantage of the stimulating scientific environment of this meeting, reestablishcontact with friends and collaborators while having a pleasant stay here. If you
encounter any di�culties during your stay, please feel free to contact any of us from theOrganizing Committee.
Organizing Committee
Claudio A. Buzzi (UNESP)Joao C. da R. Medrado (UFG)Ketty A. Rezende (UNICAMP)Luci A. F. Roberto (UNESP)Paulo R. da Silva (UNESP)
Ricardo M. Martins (UNICAMP)
Scientific Committee
Freddy Dumortier (Universiteit Hasselt/Belgium)Jaume Llibre (Universitat Autonoma de Barcelona/Spain) (Chair)
Jeroen Lamb (Imperial College London/UK)John Hogan (Bristol University/UK)
Jorge Sotomayor (Universidade de Sao Paulo/Brazil)Mario Jorge Carneiro (Universidade Federal de Minas Gerais/Brazil)
Maria Aparecida Soares Ruas (Universidade de Sao Paulo/Brazil)Ronaldo Garcia (Universidade Federal de Goias/Brazil)
Address
Rua Sergio Buarque de Holanda, 651. Cidade Universitaria ”Zeferino Vaz”Distr. Barao Geraldo - CEP 13083-859. Campinas - Sao Paulo - Brasil
Phone: +55 19 3521-5921 E-mail: [email protected]

MAT70 ≠ VI Workshop on Dynamical Systems
General Information
Meals and Refreshment
There are several restaurants on campus. You can locate them on the university mapappended herein (Page 53).
Social Events
• Monday, May 26 at 18h30The Opening Cocktail will happen at Aulus Videobar & Restaurant. The partici-
pants can go to the cocktail directly from IMECC, after the last talk. The restaurant islocated a few minutes away.
• Wednesday, May 28 at 20h30The O�cial Dinner will take place at Estancia Grill Churrascaria. The dinner cost
is included on the registration fee as a courtesy. For non registered participants, ticketscost R$ 70 each. More information about the transportation for the dinner will be givenduring the meeting.
Health Emergencies
In case of accidents or health emergencies call 192 (SAMU).
Money Exchange
In case you need to exchange your money, there are two exchange banks at university.Locate them on the map, on page 55. Another option is at Shopping Parque D. Pedroand you should look for Confidence Cambio.
Smoking
Smoking is prohibited inside the IMECC building.

MAT70 ≠ VI Workshop on Dynamical Systems
Computer and wireless LAN use
There will be computers available for use at room LCC 01, located at the under-ground, near the elevator. You may use Login: mat070lab and Password: MAT070-2014.
The University provides access to wireless internet connection via eduroam.
If you do not possess an eduroam account, you can access another of our wirelessconnection through the following steps:
1. Enable wireless on your device.2. Join the IMECC-Eventos wireless network.3. Open a browser and try to visit any website.4. You will be redirected to a login page.5. Enter the Password: MAT070-2014
Information Center
In case you need additional information, there is a University Information Centerlocated at Av. Roxo Moreira, 401 (look at Page 55).
You can see the complete map on http://migre.me/jaEfz.


MAT70 ≠ VI Workshop on Dynamical Systems
Sponsors
The VI Workshop on Dynamical Systems wishes to thank the following organi-zations for sponsoring this event.
UnicampUniversidade Estadual de Campinaswww.unicamp.br
IMECCInstituto de Matematica, Estatıstica e Computacao Cientıficawww.ime.unicamp.br
BreudsBrazilian-European Partnership in Dynamical Systemshttp://www2.imperial.ac.uk/ jswlamb/DynamIC/BREUDS/
INCTmatInstituto Nacional de Ciencia e Tecnologia de Matematicainctmat.impa.br
The VI Workshop on Dynamical Systems wishes to thank the following organi-zations for providing the financial support for the realization of this meeting.
FAPESPFundacao de Auxılio a Pesquisa do Estado de Sao Paulowww.fapesp.br
CAPESCoordenacao de Aperfeicoamento Pessoal de Nıvel Superiorwww.capes.br
CNPqConselho Nacional de Desenvolvimento Cientıfico e Tecnologicowww.cnpq.br

MAT70 ≠ VI Workshop on Dynamical Systems
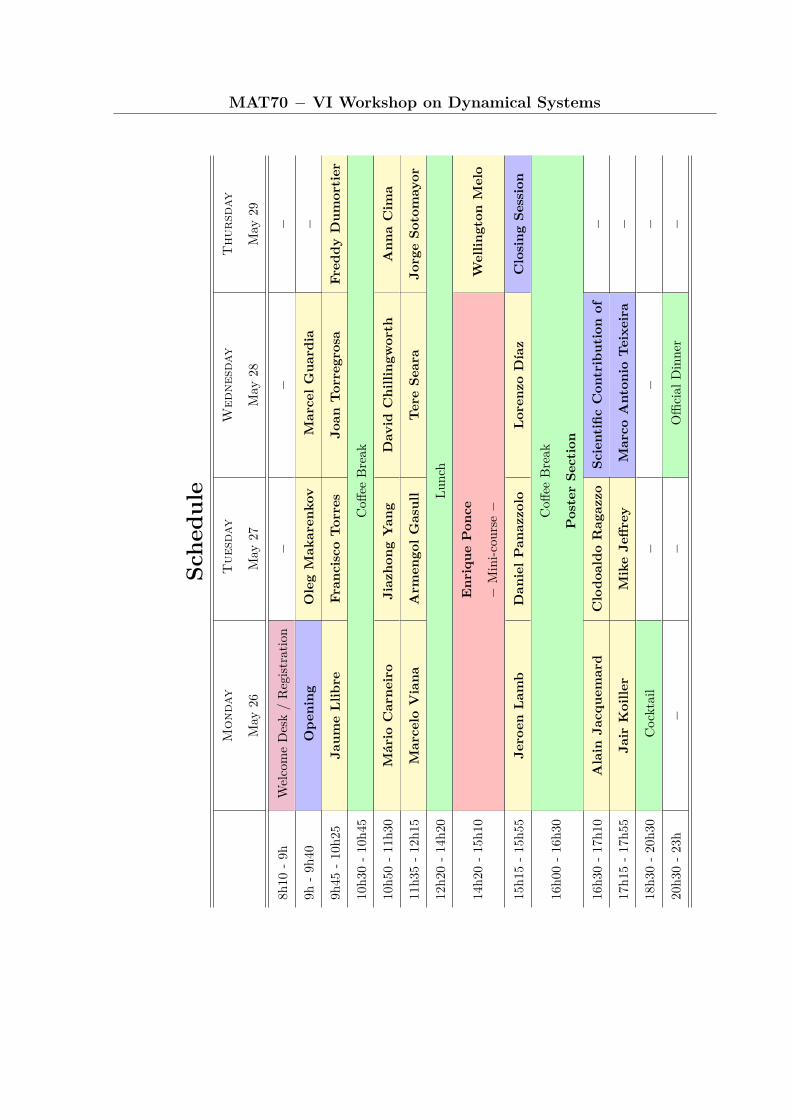
Sche
dule
Mon
day
May
26
Tue
sday
May
27
Wed
nesd
ay
May
28
Thu
rsda
y
May
29
8h10
-9h
Wel
com
eD
esk
/R
egist
ratio
n≠
≠≠
9h-9
h40
Ope
ning
Ole
gM
akar
enko
vM
arce
lGua
rdia
≠
9h45
-10h
25Ja
ume
Llib
reFr
anci
sco
Torr
esJo
anTo
rreg
rosa
Fred
dyD
umor
tier
10h3
0-1
0h45
Co�
eeBr
eak
10h5
0-1
1h30
Mar
ioC
arne
iro
Jiaz
hong
Yan
gD
avid
Chi
lling
wor
thA
nna
Cim
a
11h3
5-1
2h15
Mar
celo
Via
naA
rmen
golG
asul
lTe
reSe
ara
Jorg
eSo
tom
ayor
12h2
0-1
4h20
Lunc
h
14h2
0-1
5h10
Enr
ique
Pon
ce
≠M
ini-c
ours
e≠
Wel
lingt
onM
elo
15h1
5-1
5h55
Jero
enLa
mb
Dan
ielP
anaz
zolo
Lore
nzo
Dıa
zC
losi
ngSe
ssio
n
16h0
0-1
6h30
Co�
eeBr
eak
Pos
ter
Sect
ion
16h3
0-1
7h10
Ala
inJa
cque
mar
dC
lodo
aldo
Rag
azzo
Scie
ntifi
cC
ontr
ibut
ion
of≠
17h1
5-1
7h55
Jair
Koi
ller
Mik
eJe
�rey
Mar
coA
nton
ioTe
ixei
ra≠
18h3
0-2
0h30
Coc
ktai
l≠
≠≠
20h3
0-2
3h≠
≠O
�ci
alD
inne
r≠


MAT70 ≠ VI Workshop on Dynamical Systems
Contents
Plenary Talks 1Jaume Llibre
The local and global complete integrability of a di�erential system in Rn
essentially comes from the linear di�erential systems . . . . . . . . . . . . . 3Mario Jorge Dias Carneiro
A generic property of exact magnetic Lagrangians . . . . . . . . . . . . . . . 3Marcelo Viana
Physical measures and absolute continuity for one-dimensional center direction 3Jeroen S.W. Lamb
Mixed dynamics in reversible systems . . . . . . . . . . . . . . . . . . . . . . 4Alain Jacquemard
An application of Algebraic Geometry to the contrast problem in NuclearMagnetic Resonance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Jair KoillerDynamic Markov-Dubins problem . . . . . . . . . . . . . . . . . . . . . . . . 5
Oleg MakarenkovBifurcation and stability of limit cycles in switching systems . . . . . . . . . 5
Francisco TorresA General Mechanism to Generate Three Limit Cycles in Planar FilippovSystems with Two Zones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Jiazhong YangOn the hyperelliptic limit cycles of Lienard systems . . . . . . . . . . . . . . 7
II MAT70 ≠ VI Workshop on Dynamical Systems
Armengol GasullThe Harmonic Balance method: a theoretical basis and some practical ap-plications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Daniel Cantergiani PanazzoloMore limit cycles than expected in Lienard equations . . . . . . . . . . . . . 8
Clodoaldo Grotta RagazzoScalar Autonomous Second Order Ordinary Di�erential Equations . . . . . . 8
Mike R. Je�reyPerturbing a nonsmooth system . . . . . . . . . . . . . . . . . . . . . . . . . 9
Marcel GuardiaNearly integrable systems with orbits accumulating to KAM tori . . . . . . 10
Joan TorregrosaLower bounds for the maximum number of limit cycles of discontinuouspiecewise linear di�erential systems with a straight line of separation . . . . 10
David ChillingworthNormal form and bifurcation for the Teixeira singularity . . . . . . . . . . . 11
Tere M. SearaSliding bifurcations after Sotomayor-Teixeira regularisation: an applicationof singular perturbation theory to Filippov Systems . . . . . . . . . . . . . . 11
Lorenzo DiazRobust existence of non-hyperbolic ergodic measures with positive entropy . 12
Freddy DumortierConfigurations of limit cycles in Lienard equations . . . . . . . . . . . . . . 12
Anna CimaAlgebraic entropy for birational maps in the plane . . . . . . . . . . . . . . 13
Jorge SotomayorQualitative Aspects of the Di�erential Equations of Principal CurvatureLines on Hypersurfaces of Euclidean 4-space and their Partially UmbilicSingularities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Wellington MeloRigidity of smooth critical circle maps . . . . . . . . . . . . . . . . . . . . . 14
MAT70 ≠ VI Workshop on Dynamical Systems III
Mini-course 15Enrique Ponce
Bifurcations in piecewise linear systems: case studies . . . . . . . . . . . . . 17
Posters 23Kamila Andrade
A degenerated cycle passing through a hyperbolic saddle in a discontinuousvector field on the plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Azzouzi BadreddineEstimation and Convergence of a Moving Average . . . . . . . . . . . . . . . 25
Ricardo BenitoThe Liapunov-Schmidt Reduction and the Hopf Bifurcation . . . . . . . . . 26
Francisco BraunHalf-Reeb components, Palais-Smale condition and global injectivity in R3 . 26
Claudio BuzziGeneric Bifurcation of Refracted Systems . . . . . . . . . . . . . . . . . . . 26
Pedro T. CardinConstrained di�erential systems and multiple time scale singular perturba-tion problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Tiago de CarvalhoOn Poincare-Bendixson Theorem and Non-Trivial Minimal Sets in PlanarNonsmooth Vector Fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Jeferson CassianoSobre a existencia de ciclo limite no sistema de Matsumoto-Chua Contınuopor Partes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Oscar A.R. CespedesBifurcation of a Center Piecewise Continuous Systems of Di�erential Equa-tions on 2≠dimensional Cylinder . . . . . . . . . . . . . . . . . . . . . . . . 28
Douglas H. CruzLinhas de curvatura das frentes de ondas do elipsoide . . . . . . . . . . . . . 29
Thais B. DamacenaOn non-smooth perturbations of smooth systems . . . . . . . . . . . . . . . 29
IV MAT70 ≠ VI Workshop on Dynamical Systems
Marcia Pragana DantasEquilibrium points of the restricted three body problem with perturbed po-tential . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Lucia Brandao DiasResonance parametric in the 4 + 2 restricted body problem . . . . . . . . . . 30
Rodrigo D. EuzebioA version of Poincare-Bendixson Theorem for Discontinuous Vector Fields . 30
Bruno Rodrigues de FreitasOn the maximum number of limit cycles associated to a piecewise lineardi�erential systems on R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Alacyr Jose GomesConfiguracoes Principais e a Geometria dos Campos de Vetores . . . . . . . 32
Otavio GomideLimit Cycles of Planar Systems Bifurcating from a Period Annulus . . . . . 33
Marcio GouveiaThe set of periods of periodic homeomorphisms of some pinched surfaces . . 33
Tayed HamaiziaThe Role of Zaslavskii Chaotic Map in Global Optimization . . . . . . . . . 34
Konstantinos KourliourosSingularities in the Geometric Theory of Hamiltonian Systems with Con-straints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Maite Kulesza3≠dimensional periodic orbits of the Henon-Heiles Potential . . . . . . . . . 35
Juliana LarrosaStructural Stability of NSDS around a typical singularity . . . . . . . . . . . 35
Hugo LeivaApproximate Controllability of the Semilinear Heat Equation with Memoryand Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Maurıcio LimaNormally Hyperbolic Sets in Discontinuous Dry Friction Oscillators . . . . . 36

MAT70 ≠ VI Workshop on Dynamical Systems V
Irina MartynovaDegenerate resonances in planar systems with small negative divergence andtheir stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Joao Carlos MedradoUniqueness of limit cycles for sewing planar piecewise linear systems . . . . 38
Joao Paulo Ferreira de MelloFuncao de Melnikov em Sistemas Dinamicos Descontınuos . . . . . . . . . . 38
Luis Fernando MelloAn arbitrary number of limit cycles for a class of planar discontinuous piece-wise linear di�erential systems with two zones . . . . . . . . . . . . . . . . . 39
Ana O. MereuCiclos limites para sistemas diferenciais quadraticos descontınuos com duaszonas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Ali MessaoudiJulia sets of a class of C2 maps . . . . . . . . . . . . . . . . . . . . . . . . . 40
Marcelo MessiasNormal forms of Polynomial di�erential systems in R3 having an invariantquadric . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Jaime Rezende de MoraesLimit cycles for a class of continuous and discontinuous cubic polynomialdi�erential systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Anna Paula OliveiraPersistence in Dynamical Systems . . . . . . . . . . . . . . . . . . . . . . . . 41
Regilene OliveiraThe center problem for a 1 : ≠4 resonant quadratic system . . . . . . . . . . 42
Daniel J. PaganoThe T-Singularity in Power Eletronics . . . . . . . . . . . . . . . . . . . . . 42
Weber F. PereiraA family of reversible quadratic polynomial vector fields on S2 . . . . . . . 43
Claudio PessoaPiecewise Smooth Vector Fields on the tridimensional space at Infinity . . . 43
VI MAT70 ≠ VI Workshop on Dynamical Systems
Claudio PessoaThe Hopf Bifurcation in the Shimizu-Morioka System . . . . . . . . . . . . . 43
Alex Carlucci RezendeThe complete study of quadratic systems with irreducible invariant hyperbolas 43
Luci Any RobertoBounds for the bifurcation set of a 2-Parameter Family of Planar Systems . 44
Ivan SamylovskiyFirst- and second-order analysis of the time-optimal trajectories in the Reedsand Shepp problem with free final direction . . . . . . . . . . . . . . . . . . 45
Cintia Ap. da Silva ScanholatoControlabilidade e acessibilidade de sistemas de controle . . . . . . . . . . . 46
Paulo Ricardo SilvaRegularization and Singular Perturbation Techniques for Non-Smooth Systems 47
Tharsis Souza SilvaCampo Descontınuo Nilpotente com Chaveamento em R4 . . . . . . . . . . . 47
Wender J. SouzaOn Regularization of Volume-Preserving Systems piecewisely . . . . . . . . . 48
Durval TononPiecewise smooth vector fields on R3 . . . . . . . . . . . . . . . . . . . . . . 48
Edson VargasInvariant Measures for Cherry Flows . . . . . . . . . . . . . . . . . . . . . . 49
Anastasia K. VdovinaA Study of a One-Dimensional Optimal Control Problem with a PurelyState-Dependent Cost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Maps 51
List of Speakers 58
MAT70 ≠ VI Workshop on Dynamical Systems
Plenary Talks

MAT70 ≠ VI Workshop on Dynamical Systems 3
The local and global complete integrability of a di�erentialsystem in Rn essentially comes from the linear di�erential
systems
Jaume LlibreUniversitat Autonoma de Barcelona - Barcelona - ES
The Flow Box Theorem shows that the local dynamics of a di�erential system in Rn
removing the singular points is the dynamics of a linear di�erential system, and that thesystem is locally completely integrable. The objective of this talk is to show that alsothe dynamics of a global complete integrable di�erential system in Rn with divergencenon-identically zero, removing a set of zero Lebesgue measure, is the dynamics of a lineardi�erential system.
A generic property of exact magnetic Lagrangians
Mario Jorge Dias CarneiroICEX, Universidade Federal de Minas Gerais, Belo Horizonte, MG, Brasil
We prove that for the set of Exact Magnetic Lagrangians the pro-perty “There existfinitely many static classes for every cohomology class” is generic. We also prove somedynamical consequences of this property.
Physical measures and absolute continuity for one-dimensionalcenter direction
Marcelo VianaIMPA, Rio de Janeiro, Brazil
For a class of partially hyperbolic Ck, k > 1 di�eomorphisms with circle center leaveswe prove the existence and finiteness of physical (or Sinai-Ruelle-Bowen) measures, whosebasins cover a full Lebesgue measure subset of the ambient manifold. Our conditions holdfor an open and dense subset of all Ck partially hyperbolic skew-products on compactcircle bundles.
Our arguments blend ideas from the theory of Gibbs states for di�eomorphisms withmostly contracting center direction together with recent progress in the theory of cocycles

4 MAT70 ≠ VI Workshop on Dynamical Systems
over hyperbolic systems that call into play geometric properties of invariant foliationssuch as absolute continuity. Recent results show that absolute continuity of the centerfoliation is often a rigid property among volume preserving systems. We prove that thisis not at all the case in the dissipative setting, where absolute continuity can even berobust.
Mixed dynamics in reversible systems
Jeroen S.W. LambDepartment of Mathematics Imperial College London London SW7 2AZ, UK
We show that resonance zones near an elliptic periodic point of a reversible map must,generically, contain asymptotically stable and asymptotically unstable periodic orbits,along with wild hyperbolic sets. This is joint work with Sergey Gonchenko, Isabel Riosand Dmitry Turaev.
An application of Algebraic Geometry to the contrast problemin Nuclear Magnetic Resonance
Alain JacquemardIMB - UMR CNRS 5584, DIJON (F)
The problem of maximizing the contrast in Nuclear Magnetic Resonance spectroscopyis an important issue in Medicine. It depends on the biological matter (blood, cerebralmatter, water...) the device is focused on. Too low a contrast must be enhanced byproviding contrast accelerators to the patient, with toxicity issues.
The aim of the project is to give mathematical methods to get the optimal contrastjust by controlling the spectroscope.
We present a model consisting of two coupled vector fields controlled by magnetizationparameters, and we address the contrast problem to the question of the classification ofquadrics in four dimension.
Standard algorithms of E�ective Algebraic Geometry are used, although special im-provements permit to bypass the intrinsic high level of complexity of the formal compu-tations.

MAT70 ≠ VI Workshop on Dynamical Systems 5
Knowing precisely the underlying geometry of the problem is the first step in con-structing e�ective control strategies. We discuss our results in real cases correspondingto the most challenging biological interfaces.
Dynamic Markov-Dubins problem
Jair KoillerApplied Mathematics School, Fundacao Getulio Vargas, Brazil
This is joint work with Alex Castro (PUC/RJ). Andrei Andreyevich Markov proposedin 1889 the problem (solved by Dubins in 1957) of finding the twice continuously di�er-entiable (arc length parameterized) curve with bounded curvature, of minimum length,connecting two unit vectors at two arbitrary points in the plane. In this note we con-sider the following variant, which we call the dynamic Markov-Dubins problem (dM-D):to find the time-optimal C2 trajectory connecting two velocity vectors having possiblydi�erent norms. The control is given by a force whose norm is bounded. The acceler-ation may have a tangential component, and corners are allowed, provided the velocityvanishes there. We show that for almost all the two vectors boundary value conditions,the optimization problem has a smooth solution. We suggest some research directions forthe dM-D problem on Riemannian manifolds, in particular we would like to know whathappens if the underlying geodesic problem is completely integrable. Path planning inrobotics and aviation are natural applications, and we also outline a pursuit problem.Finally, we suggest an application to “dynamic imaging science”. Short time processes (inmedicine and biology, in environment sciences, geophysics, even social sciences?) can bethought as tangent vectors.
Bifurcation and stability of limit cycles in switching systems
Oleg MakarenkovUniversity of Texas - Dallas - USA
Consider a couple of vector fields (F1, F2) and a couple of switching manifolds (S1, S2).Each trajectory x(t) follows the vector field F1 until x(t) crosses S1, where the systemswitches to the vector field F2 that governs the trajectory until it reaches S2 where theswitch back to S1 occurs. The existence and stability of limit cycles in such a system is

6 MAT70 ≠ VI Workshop on Dynamical Systems
known since the classical work of Barbashin (1967) whose approach employs a Lyapunov-like technique. In this talk I discuss my joint work with Kuepper where the aforementionedcycles are seen as a bifurcation from (0, 0) when a suitably defined parameter crosses itsbifurcation value. Our interest in switching systems is motivated by applications in con-trol, where the switching is used to achieve closed-loop control strategies, see e.g. thepaper by by Tanelli et al. (Internat. J. Control 2009. V. 82. no 4. P. 659-678). Thisresearch is partially supported by the RFBR Grant 12-01-00254.
The work is supported by the grant 13-01-00347 of Russian Foundation of Basic Re-search.
A General Mechanism to Generate Three Limit Cycles inPlanar Filippov Systems with Two Zones
Francisco TorresEscuela Tecnica Superior de Ingenierıa, Spain
Discontinuous piecewise linear systems with two zones are considered. It is shownthat the existence of a focus in one zone is su�cient to get three nested limit cyclesindependently on the dynamics of the another linear zone. Starting from a situationwith only one hyperbolic limit cycle, other two limit cycles are obtained by an adequatecombination of a boundary focus bifurcation and a pseudo-Hopf bifurcation.
We consider the family of systems
x =Q
a 2“L
≠1“2
L
+ 1 0
R
b x ≠Q
a 0a
L
R
b if x œ S≠ = {(x, y) : x < 0},
x =Q
a 2“R
≠1“2
R
+ 1 ≠ m2R
0
R
b x ≠Q
a ≠b
aR
R
b if x œ S+ = {(x, y) : x > 0}
(1)
under the restrictions “L
> 0, aL
Æ 0, “R
< 0, aR
< 0 and mR
œ i, 0, 1.Our main result is the following:
Theorem. Assume aR
< 0, “R
< 0, and mR
œ i, 0, 1 in system (1). Then there exist“
L
> 0, Á > 0 and two continuous functions ÷1, ÷2 with ÷1(0) = ÷2(0) = 0 and satisfying÷1(Á) < ÷2(Á) < 0 for ≠Á < › < 0, such that for ≠Á < a
L
< 0 and ÷1(aL
) < b < ÷2(aL
)system (1) has at least three nested crossing periodic orbits.

MAT70 ≠ VI Workshop on Dynamical Systems 7
This is a joint work with Emilio Freire and Enrique Ponce.
On the hyperelliptic limit cycles of Lienard systems
Jiazhong YangPeking University, China
In this talk I will present some recent results of two papers on hyperelliptic limit cyclesof the Lienard systems. The first paper is cooperated with C. Liu, G. Chen and Yangand the second one with C. Liu, R. Qu and Yang. More precisely, we shall consider thefollowing Lienard system
x = y, y = ≠fm
(x)y ≠ gn
(x),
where, respectively, fm
(x) and gn
(x) are polynomials of degree m and n, gn
(0) = 0.We first prove that, if m Ø 5 and m + 1 < n < 2m, then there always exist Lienard
systems of the above form such that they have a hyperelliptic limit cycle.This gives a positive answer to the open problem posed in the paper [X. Yu, X. Zang,
The hyperelliptic limit cycles of the Lienard systems, J. Math Anal. Appl. 376 (2011)535-539]. By combining all the results obtained up to now, we in fact give a completeclassification of the hyperelliptic limit cycles of the Lienard systems: Lienard systems ofthe above form have hyperelliptic limit cycles only in the following cases (i) m = 2; 3 andm + 3 Ø n; (ii) 4 Ø m and m + 2 Æ n.
Based on the above classification, we further more obtain lower bounds of the numberof hyperelliptic limit cycles in all the cases, and upper bounds of the problem in certaincases.
The Harmonic Balance method: a theoretical basis and somepractical applications
Armengol GasullUniversitat Autonoma de Barcelona - Spain
The Harmonic Balance method provides a heuristic approach for finding truncatedFourier series as an approximation to the periodic solutions of ordinary di�erential equa-
8 MAT70 ≠ VI Workshop on Dynamical Systems
tions. In the first part of the talk we recover the pioneering results of Stokes and Urabethat provide a theoretical basis for proving that near these truncated series there areactual periodic solutions of the equation. In the second part we consider several familiesof potential systems and study their associated period functions. Firstly, we prove someproperties of these functions, like their local behaviour near the critical point or infinity,or their global monotonicity. Secondly, we show that these properties are also presentwhen we approach to the same questions using the Harmonic Balance Method. This talkis based on a joint work with Johanna D. Garcıa-Saldana.
More limit cycles than expected in Lienard equations
Daniel Cantergiani PanazzoloUniversite de Haute-Alsace, Mulhouse, France
The paper deals with classical polynomial Lienard equations, i.e. planar vector fieldsassociated to scalar second order di�erential equations xÕÕ + f(x)xÕ + x = 0 where f isa polynomial. We prove that for a well-chosen polynomial f of degree 6, the equationexhibits 4 limit cycles. It induces that for n Ø 3 there exist polynomials f of degree 2n
such that the related equations exhibit more than n limit cycles. This contradicts theconjecture of Lins, de Melo and Pugh stating that for Lienard equations as above, withf of degree 2n, the maximum number of limit cycles is n. The limit cycles that we foundare relaxation oscillations which appear in slow-fast systems at the boundary of classicalpolynomial Lienard equations. More precisely we find our example inside a family ofsecond order di�erential equations ÁxÕÕ + f
µ
(x)xÕ + x = 0. Here, fµ
is a well-chosen familyof polynomials of degree 6 with parameter µ œ R4 and Á is a small positive parametertending to 0. We use bifurcations from canard cycles which occur when two extrema of thecritical curve of the layer equation are crossing (the layer equation corresponds to Á = 0).As was proved by Dumortier and Roussarie (2005) these bifurcations are controlled by arational integral computed along the critical curve of the layer equation, called the slowdivergence integral. Our result is deduced from the study of this integral.

MAT70 ≠ VI Workshop on Dynamical Systems 9
Scalar Autonomous Second Order Ordinary Di�erentialEquations
Clodoaldo Grotta RagazzoUniversidade de Sao Paulo, Sao Paulo, BR
This paper is about equations of the form uÕ = v, vÕ = F (u, v) where (u, v) œ R2 and F
is an infinitely di�erentiable function. Its main theorem states that if F (u, ≠v) = F (u, v)then, under some additional conditions, there exists an infinitely di�erentiable change ofvariables (u, v) æ (x, y) onto R2 such that in the new variables the equation becomesxÕ = y, yÕ = g(x).
Perturbing a nonsmooth system
Mike R. Je�reyUniversity of Bristol, Bristol BS8 1TR, UK
How do you perturb a piecewise smooth flow? Recent advances have focussed onbifurcations (perturbations away from structurally unstable flow topologies), and reg-ularization (smoothing or other procedures to eliminate any discontinuities). Both ofthese have brought a common question to the fore: is the regularization of a non-smoothsystem unique? This has significance for whether novel dynamics, such as bifurcations,or the determinacy-breaking event that lies at the heart of the Teixeira singularity, areobservable in real systems. It turns out that uniqueness is determined not by how we reg-ularize a system, but by the way we define the nonsmooth system in the first place. Thestandard definition is missing certain latent terms which vanish everywhere except at thediscontinuity, but which can be excited when the system is perturbed, upon which theybecome readily observable. The latent terms are unobservable away from the discontinu-ity, but predict globally observable phenomena such as periodic stick-slip oscillations infriction dynamics, for example, where conventional analysis would predict decay to a fixedpoint. By incorporating latent terms it is possible to show that every nonsmooth systemhas a unique counterpart in the smooth world. In doing so, a world of dynamics is revealedtaking place inside the discontinuity. The pioneers of nonsmooth dynamics half a centuryago, foremost among which was Aleksei Filippov who passed away in 2006, were wellaware that a vast world of behaviour existed in nonsmooth systems beyond the so-called

10 MAT70 ≠ VI Workshop on Dynamical Systems
Filippov convention. They showed that under certain assumptions a nonsmooth systemsatisfied certain properties of regular perturbations. The topological equivalence betweencertain smooth and nonsmooth systems, proven by Marco Antonio Teixeira and otherscoincidentally in 2006, revealed the central role of singular perturbations. Introducing sin-gular perturbations takes nonsmooth theory beyond Filippov’s vision of vector fields that,despite being discontinuous, are nevertheless convex. Latent terms violate this convexityin a way understandable through singular perturbations. Sliding dynamics then becomesmultilayered, giving rise to relaxation dynamics inside the discontinuity. The di�erentbranches of sliding can be attrac tive or repulsive, can exist where Filippov’s conventionpredicts crossing, and can appear or disappear via folds. Intersections between discontinu-ities gives rise to multi-dimensional dynamics inside the discontinuity, which creates novelattractors that can be simulated by di�erent methods, giving readily observable evidenceof the latent terms. Finally, it is at last possible to show that nonsmooth systems are ro-bust to perturbation due to noise, which causes collapse of non-convex terms to the classicFilippov convex solution. This shows that novel behaviours, such as non-deterministicchaos and discontinuity-induced bifurcations, are indeed robust features, securing theirimportance for understanding nonsmooth dynamics in applications.
Nearly integrable systems with orbits accumulating to KAMtori
Marcel GuardiaInstitut de Mathematiques de Jussieu, Universite Paris, Paris, FR
The quasi-ergodic hypothesis, proposed by Ehrenfest and Birkho�, says that a typicalHamiltonian system of n degrees of freedom on a typical energy surface has a dense orbit.This question is wide open. In this talk I will explain a recent result by V. Kaloshin andmyself which can be seen as a weak form of the quasi-ergodic hypothesis. We prove that adense set of perturbations of integrable Hamiltonian systems of two and a half degrees offreedom possess orbits which accumulate in sets of positive measure. In particular, theyaccumulate in prescribed sets of KAM tori.

MAT70 ≠ VI Workshop on Dynamical Systems 11
Lower bounds for the maximum number of limit cycles ofdiscontinuous piecewise linear di�erential systems with a
straight line of separation
Joan TorregrosaUniversitat Autonoma de Barcelona, Barcelona, ES
In this work, we provide a lower bound for the maximum number of limit cyclesof planar discontinuous piecewise linear di�erential systems defined in two half-planesseparated by a straight line. Here, we only consider nonsliding limit cycles. For thosesystems, the interior of any limit cycle only contains a unique equilibrium point or a uniquesliding segment. Moreover, the linear di�erential systems that we consider in every half-plane can have either a focus (F), or a node (N), or a saddle (S), these equilibrium pointscan be real or virtual. Then, we can consider six kinds of planar discontinuous piecewiselinear di�erential systems: FF, FN, FS, NN, NS, SS. We provide for each of these typesof discontinuous di�erential systems examples with two limit cycles.
Normal form and bifurcation for the Teixeira singularity
David ChillingworthUniversity of Southampton, UK
Local dynamics of the Teixeira (double-fold) singularity for a discontinuous for a dis-continuous vector field can be understood in terms of iteration of a pair of involutions.We investigate a normal form for this structure, as a tool for understanding its genericlocal bifurcations.
Sliding bifurcations after Sotomayor-Teixeira regularisation: anapplication of singular perturbation theory to Filippov Systems
Tere M. SearaUniversitat Politecnica de Catalunya - Barcelona - Spain
In this talk we study the dynamics of regularised Filippov systems using singularperturbation theory. The main goal is to understand how bifurcations which are typical

12 MAT70 ≠ VI Workshop on Dynamical Systems
for non-smooth systems evolve to classical well known bifurcations when the system isregularized. This work does a detailed study of the so-called sliding bifurcations.
Robust existence of non-hyperbolic ergodic measures withpositive entropy
Lorenzo DiazPontifıcia Universidade Catolica do Rio de Janeiro, Brazil
We present a method to construct ergodic non-hyperbolic measures with positive en-tropy. This method involves a so-called flip-flop configuration that is derived from theexistence of a blender.
Using this method we prove that if U is a C1-open set of di�eomorphism where ahomoclinic class contains a pair of saddles of di�erent indices then open and denselyin U the di�eomorphisms have ergodic non-hyperbolic measures with positive entropysupported in the class.
Join work with J. Bochi (Puc-Rio) and C. Bonatti (Bourgogne)
Configurations of limit cycles in Lienard equations
Freddy DumortierUniversiteit Hasselt, Belgium
We show that every finite configuration of disjoint simple closed curves in the planeis topologically realizable as the set of limit cycles of a polynomial Lienard equation.The related vector field X is Morse-Smale. Moreover it has the minimum number ofsingularities required for realizing the configuration in a Lienard equation. We provide anexplicit upper bound on the degree of X, which is lower than the results obtained before,obtained in the context of general polynomial vector fields.

MAT70 ≠ VI Workshop on Dynamical Systems 13
Algebraic entropy for birational maps in the plane
Anna Cima, Sundus ZafarUniversidad Autonoma de Barcelona, Spain
Given a birational map in the plane f : C2 æ C2 we consider its extension F : PC2 æPC2 to the projective plane. In homogeneous coordinates, the three components of F arehomogeneous polynomials of the same degree. The degree d of f is defined as the degreeof each one of this components. If we denote by d
n
the degree of Fn
; then the dynamicaldegree of f is defined as:
”(f) = limnæŒ
(dn
)1/n
It can be proved that this number always exists and that it varies between 1 and d.The logarithm of ”(f) is named algebraic entropy of f .
By using the blowing-up technique, it is possible to calculate the algebraic entropy ofsuch mappings. In this talk we will see several dynamical applications of the algebraicentropy for such mappings. We will focus in mappings of zero entropy. Among them wewill find families of periodic mappings and mappings which are rationally integrable.
Qualitative Aspects of the Di�erential Equations of PrincipalCurvature Lines on Hypersurfaces of Euclidean 4-space and
their Partially Umbilic Singularities
Jorge SotomayorUniversidade de Sao Paulo - Sao Paulo - Brasil
After a discussion of some historical landmarks for the study of the di�erential equa-tions as in the title, going back to Euler, Monge and Darboux, for the case of surfacesin Euclidean 3-space, the results of Gutierrez and Sotomayor (1982-3) on surfaces withStructurally StableConfigurations of principal curvature lines and umbilic singularitiesand their Bifurcations will be reviewed and briefly compared with Peixoto?s Theorem(1962) for Structurally Stable Di�erential Equations (Vector Fields) and their Bifurca-tions (Sotomayor, 1974) on compact surfaces. An extension of the results for surfaces tohypersurfaces in Euclidean 4-space will be presented in the form of an improved version ofthe Genericity Theorem (of Kupka ? Smale type) due to R. Garcia (1992). New elements
14 MAT70 ≠ VI Workshop on Dynamical Systems
of this improvement include the stratified structure of the partially umbilic singularitiesand the analysis of the heteroclinic partially umbilic connections and attached separatrixsurfaces. Open problems and situations where the analysis of Principal Structures, asthose in the lecture, for modeling and applications will be mentioned.
Work in collaboration with R. Garcia (UFG) and D. Lopes (UFS).
Rigidity of smooth critical circle maps
Wellington MeloIMPA, Brazil
In a joint paper with Paolo Guarino we prove that there exist a universal number1 > – > 0 such that if f and g are two C3 critical circle maps with the same rotationnumber of bounded type they are C1+– conjugate. In a joint work with Pablo Guarinoand Marco Martens we proved that any two smooth critical circle maps with the sameirrational rotation number are C1 conjugate. Furthermore, there is a subset A µ [0, 1]of irrational numbers having full Lebesgue measure such that if the rotation numbers areequal and belong to A the conjugacy is C1+– for a universal – > 0.
MAT70 ≠ VI Workshop on Dynamical Systems
Mini-course


MAT70 ≠ VI Workshop on Dynamical Systems 17
Bifurcations in piecewise linear systems: case studies
Enrique PonceUniversity of Sevilla, Spain
Introduction to the courseThe interest on the analysis of piecewise linear di�erential systems (simply piecewise
linear systems in what follows) has increased in the last decades as modern engineeringapplications require the piecewise linear modeling of a wide range of problems in me-chanics, power electronics, control theory, biology and so on, see [1]. On the one handpiecewise linear systems are the natural extension of the linear ones in order to cope withnonlinear phenomena, for they can reproduce much of the complex behavior observed insmooth nonlinear systems: multi-stability, self-sustained oscillations, hysteretic behavior,homoclinic and heteroclinic connections and of course, chaotic behavior. On the otherhand, piecewise linear systems turn out to be the most accurate models for some realisticapplications in the quoted fields.
Piecewise linear systems can be classified in two big classes depending on the continuityof the associated vector field. Discontinuous cases constitute nowadays the subject ofintense research, see again [1], and there is not yet a total agreement about basic conceptsand definitions. Thus, excepting several simple instances, most of the case studies to beconsidered in the course will correspond to continuous piecewise linear systems (CPWL,for short). In fact, there are still unsolved issues in the continuous case, even for theseemingly simple problem of stability of the only equilibrium point, see [5]. Apart fromequilibria, it is very important to characterize the periodic orbits of such systems, sincethey constitute the next step in complexity for observed behavior in practice. We will payspecial attention to the study of existence of periodic orbits for piecewise linear systems,following a point of view which is typical in bifurcation theory, that is, we will studydegenerated situations and after parameter variations we will look for the appearance oflimit cycles.
Unfortunately the non-smoothness of continuous piecewise linear systems requires thatlimit cycle bifurcations must be analyzed in a case-by-case approach for the di�erent fami-lies of systems which are relevant in applications. Thus both planar and three dimensionalcases with and without symmetry will be considered revisiting previous results, see forinstance [4, 6, 7, 8].
18 MAT70 ≠ VI Workshop on Dynamical Systems
A tentative program of the course follows.
Summary of the course
1. Motivating example: the Kriegsmann’s approach to the rapid bifurcation of theWien bridge oscillator [15].
2. A preliminary glimpse on bifurcations for smooth planar systems: saddle-node, pitchfork, Andronov-Hopf and Bogdanov-Takens bifurcations [12, 16].
3. Generic bifurcations in continuous piecewise linear systems
(a) Canonical forms for sectionwise systems: Van der Pol and Lienard form forplanar CPWL systems; generalized Lienard form for multidimensional CPWLsystems [3].
(b) Bifurcation sets for two-zonal planar systems [6]. A detailed analysis of thefocus-center-limit cycle bifurcation for planar and three dimensional systemswith two zones; the onset of oscillations in Chua’s circuit [4].
(c) Bifurcations in symmetric three-zones CPWL systems: the piecewise linearanalogue of planar Bogdanov-Takens bifurcation; the focus-center-limit cyclebifurcation for planar and 3D systems [8].
(d) Stability issues in CPWL systems: the continuous matching of stable linearsystems can be unstable [5].
(e) The PWL version of Hopf-zero bifurcation [20]
4. Some bifurcations in discontinuous PWL systems
(a) Boundary equilibrium bifurcations in PWL systems leading to limit cycles: thefocus-focus and the focus-node cases [2, 19, 22].
(b) Generating three limit cycles in discontinuous PWL systems with two zones[10, 11].
(c) Discontinuous PWL systems coming from Sliding Mode Controllers [17].
MAT70 ≠ VI Workshop on Dynamical Systems
Bibliography
[1] M.di Bernardo, C.J. Budd, A.R. Champneys, P. Kowalczyk. Piecewise-smooth Dy-namical Systems, Springer-Verlag London, Applied Mathematical Sciences, Volume163 (2008).
[2] M. Di Bernardo, D.J. Pagano, E. Ponce, Non-hyperbolic boundary equilibrium bifurca-tions in planar Filippov Systems: a case study approach, Int. J. Bifurcation and Chaos18, 1377–1392 (2008).
[3] V. Carmona, E. Freire, E. Ponce and F. Torres, On symplifying and classifying piece-wise lienear systems, IEEE Transactions on Circuits and Systems 49, 609–620 (2002).
[4] V. Carmona, E. Freire, E. Ponce, J. Ros and F. Torres, Limit cycle bifurcation in3D continuous piecewise linear systems with two zones. Application to Chua’s circuit,International Journal Bifurcation and Chaos 15, 2469–2484 (2005).
[5] V. Carmona, E. Freire, E. Ponce, and F. Torres, The continuous matching of twostable linear systems can be unstable, Discrete and Continuous Dynamical Systems 16,689–703 (2006).
[6] E. Freire, E. Ponce, F. Rodrigo and F. Torres, Bifurcation sets of continuous piecewiselinear systems with two zones, International Journal Bifurcation and Chaos 8, 2073–2097 (1998).
[7] E. Freire, E. Ponce and F. Ros, Limit cycle bifurcation from center in symmetric piece-wise linear systems, International Journal Bifurcation and Chaos 9, 895–907 (1999).
20 MAT70 ≠ VI Workshop on Dynamical Systems
[8] E. Freire, E. Ponce and J. Ros, The Focus-Center-Limit Cycle Bifurcation in Sym-metric 3D Piecewise Linear Systems, SIAM J. Appl. Math. 65, 1933–1951 (2005).
[9] E. Freire, E. Ponce and J. Ros, Following a Saddle-Node of Periodic Orbits BifurcationCurve in Chua’s Circuit, International Journal of Bifurcation and Chaos 19, 487–495(2009).
[10] E. Freire, E. Ponce and F. Torres, Canonical Discontinuous Planar Piecewise LinearSystems, SIAM J. Applied Dyn. Sys. 11, 181–211 (2012).
[11] E. Freire, E. Ponce and F. Torres, A General Mechanism to Generate Three LimitCycles in Planar Filippov Systems with Two Zones, Preprint, submitted for publication(2013).
[12] J. Guckenheimer and P. Holmes, Nonlinear Oscillations, Dynamical Systems and Bi-furcations of Vector Fields, Springer-Verlag New York, Applied Mathematical Sciences,Volume 42 (1983).
[13] J. M. Golubitsky and D.G. Schae�er. Singularities and Groups in Bifurcation Theory.Springer-Verlag New York, Applied Mathematical Sciences, Volume 69 (1988).
[14] M. P. Kennedy, Three Steps to Chaos—Part II: A Chua’s Circuit Premier, IEEETransactions on Circuits and Systems—I: Fundamental Theory and Applications 40,657–674 (1993).
[15] G. Kriegsmann, The Rapid Bifurcation of the Wien Bridge Oscillator, IEEE Trans-actions on Circuits and Systems 34, 1093–1096 (1987).
[16] Yu A. Kuznetsov. Elements of Applied Bifurcation Theory (third edition). Springer-Verlag New York, 2nd edition, Applied Mathematical Sciences, Volume 112 (2004).
[17] E. Ponce and D.J. Pagano, Hopf Bifurcation in the Sliding Dynamics for a DCMBoost Converter Under SMC Strategy, Proceedings of 15th International Workshop onDynamics and Control (Tossa de Mar). International Center for Numerical Methods inEngineering (CIMNE) 127–134, (2009).
MAT70 ≠ VI Workshop on Dynamical Systems 21
[18] E. Ponce and J. Ros, On periodic orbits of 3D symmetric piecewise linear systemswith real triple eigenvalues, International Journal Bifurcation and Chaos 19, 2391–2399(2009).
[19] E. Ponce, J. Ros and E. Vela, Boundary equilibrium bifurcations in planar piecewiselinear systems with two and three zones, Preprint, submitted for publication (2013).
[20] E. Ponce, J. Ros and E. Vela, Unfolding the fold-Hopf bifurcation in piecewise linearcontinuous di�erential systems with symmetry, Physica D 250, 34–46 (2013).
[21] J. Ros, Estudio del Comportamiento Dinamico de Sistemas Autonomos Tridimen-sionales Lineales a Trozos, Ph. D. dissertation (in Spanish), Universidad de Sevilla,Spain (2003).
[22] E. Vela, Piecewise linear di�erential systems: limit cycles and analysis of bifurca-tions., Ph. D. dissertation, Universidad de Sevilla, Spain (2013).
22 MAT70 ≠ VI Workshop on Dynamical Systems

MAT70 ≠ VI Workshop on Dynamical Systems
Posters


MAT70 ≠ VI Workshop on Dynamical Systems 25
A degenerated cycle passing through a hyperbolic saddle in adiscontinuous vector field on the plane
Kamila AndradeUniversidade Estadual de Campinas, Brazil
The study of discontinuous vector fields has been developed very fast in recent yearsand it has become a common frontier between Mathematics, Physics and Engineering. Inthis context, the study of bifurcations of this type of systems is very important.
In this work we consider planar discontinuous vector fields having a straight line asthe set of discontinuity. More specifically, we present the study of a model representedby a two≠parameter family of vector fields having a degenerated cycle passing through ahyperbolic saddle and the bifurcation diagram is outlined.
Estimation and Convergence of a Moving Average
Azzouzi BadreddinePreparatory School in Economics, Business and Management Sciences Department of
Mathematics, Algeria
We study the method of estimation, and under certain conditions it was the conver-gence of a moving average process.
Let {yi
, ≠Œ ª i ª +Œ} be a doubly infinite sequence of identically distributed anddependent random variables.
{ai
, ≠Œ ª i ª +Œ} be an absolutely summable sequence of real numbers. Let Xn
=qŒ
i=≠Œ ai
yi+n
, n Ø 1, be the moving average process based on the sequence {yi
, ≠Œ ªi ª +Œ}.
As usual, we denote Sn
= qn
k=1 Xn
, n Ø 1, the sequence of partial sums. In my workwe discuss the complete convergence of (S
n
) under some suitable conditions. For examplein the „≠mixing conditions , and also treat other types of convergence.

26 MAT70 ≠ VI Workshop on Dynamical Systems
The Liapunov-Schmidt Reduction and the Hopf Bifurcation
Ricardo BenitoUniversidade Federal do Sergipe, Brazil
The main goal of this work is to apply the Liapunov-Schmidt Reduction technique inthe study of the Hopf Bifurcation. First of all we discuss the Liapunov-Schmidt Reductionin finite dimensional spaces and after that in Banach spaces of infinite many dimensions.The conclusion of this work is the proof of the Hopf Theorem using the Liapunov-SchmidtReduction.
Half-Reeb components, Palais-Smale condition and globalinjectivity in R3
Francisco Braun, Jean Venato-SantosUniversidade Federal de Sao Carlos, Brazil
Let F = (F1, F2, F3) : R3 æ R3 be a smooth map such that det DF is nowhere zero.We denote by F
Fi the foliations given by the level sets of the coordinate function Fi
.We study these foliations and prove that each of the following conditions are su�cient
to the global injecyivity of F :
1. The foliations FFi consist of leaves without half-Reeb components induced by F
Fj ,j œ {1, 2, 3} \ {i}, for i œ {1, 2, 3}.
2. For each i ”= j œ {1, 2, 3}, Fi
|L
: L æ R satisfy the Palais-Smale condition, for allL œ F
Fj .
Generic Bifurcation of Refracted Systems
Claudio BuzziUniversidade Estadual Paulista, Brazil
In this work we study systems with refraction. More precisely, let K ™ R3 be acompact set and � ™ K be given by � = f≠1(0), where f is a smooth function f : K ≠æ Rhaving 0 œ R as a regular value (i.e. Òf(p) ”= 0, for any p œ f≠1(0)). Clearly � is the

MAT70 ≠ VI Workshop on Dynamical Systems 27
separating boundary of the regions �+ = {q œ K|f(q) Ø 0} and �≠ = {q œ K|f(q) Æ 0}.Consider the space of vector fields Z : K ≠æ R3 such that
Z(x, y, z) =Y]
[X(x, y, z), for (x, y, z) œ �+,
Y (x, y, z), for (x, y, z) œ �≠,(1)
where X and Y are smooth vector fields defined on K. We are interested in the study ofdiscontinuous systems having the property Xf(p) = Y f(p) for all p in �. These systemsare known as refracted systems. These systems turn out to be relevant for applications inrelay systems. In our approach we follow the Smale’s Program to this classe of systems,i.e, we classify the generic singularities of codimensions zero and one.
This is a joint work with Joao C. Medrado (UFG/Brazil) and Marco A. Teixeira(UNICAMP/Brazil).
Constrained di�erential systems and multiple time scalesingular perturbation problems
Pedro T. CardinFaculdade de Engenharia de Ilha Solteira – FEIS–UNESP, Sao Paulo, Brazil
In this work we study the dynamics of families of constrained di�erential systems.Our main results establish a connection between the constrained systems theory and thetheory of systems of ordinary di�erential equations with multiple di�erent time scales.Finally, some illustrative examples and applications of the main results are provided.
On Poincare-Bendixson Theorem and Non-Trivial Minimal Setsin Planar Nonsmooth Vector Fields
Tiago de CarvalhoUniversidade Estadual Paulista, Brazil
In this work some qualitative and geometric aspects of nonsmooth vector fields theoryare discussed. In the class of nonsmooth systems, that do not present sliding regions,a Poincare-Bendixson Theorem is presented. A minimal set in planar Filippov systems

28 MAT70 ≠ VI Workshop on Dynamical Systems
not predicted in classical Poincare-Bendixson theory and whose interior is non-empty isexhibited. The concepts of limit sets, recurrence and minimal sets for nonsmooth systemsare defined and compared with the classical ones. Moreover some di�erences betweenthem are pointed out. Joint work with Claudio A. Buzzi and Rodrigo Euzebio. This workis partially supported by a FAPESP-Brazil grant 2012/00481-6.
Sobre a existencia de ciclo limite no sistema deMatsumoto-Chua Contınuo por Partes
Jeferson CassianoUniversidade Federal do ABC, Brazil
Neste trabalho estabelecemos condicoes suficientes no espaco de parametros para a pre-senca de um ciclo limite estavel no sistema de Matsumoto-Chua descrevendo a bifurcacaopresente. Para a prova faz-se uso de regularizacao e estudo do ”PS problem” associado edas aplicacaes do primeiro retorno associadas aos sistemas descontınuo e regularizado.
Bifurcation of a Center Piecewise Continuous Systems ofDi�erential Equations on 2≠dimensional Cylinder
Oscar A.R. Cespedes, Joao C. R. Medrado
Consider a piecewise continuous systems of diferential equations defined on the 2-dimensional cylinder C, induced by a planar linear system having a saddle, such that thediscontinuous ma- nifold coincides with one of meridians of C. In according with recentworks,we have that if saddle is conveniently situated, the system presents a sewing center.Moreover, all orbits associated to points that don’t belong to invariant manifolds of thesaddle is a non-contractible or contractible periodic solution. In this work, we study thedynamics and bifurcations of such systems.
MAT70 ≠ VI Workshop on Dynamical Systems 29
Linhas de curvatura das frentes de ondas do elipsoide
Douglas H. CruzUniversidade Federal de Goias, Brazil
O estudo de linhas de curvatura em superfıcies e assunto classico da geometria difer-encial e ocupa capıtulos nos livros classicos e atuais, por exemplo [2].
Nas frentes de ondas (veja [1]) do elipsoide surgem curvas de singularidades da su-perfıcie. Em [1], [3], [4] e realizado o estudo das frentes de ondas e de suas singularidades.
Neste trabalho vamos estudar as linhas de curvatura das frentes de ondas do elipsoide.
[1] T. Fukui, M. Hasegawa. Singularities of parallel surfaces. Tohoku Math. J. (2)Vol. 64(3) Pg. 387-408, 2012.
[2] R. Garcia, J. Sotomayor. Di�erential equations of classical geometry, a qualitativetheory. Publicacoes Matematicas, IMPA, 27o Coloquio Brasileiro de Matematica, 2009.
[3] K. Saji, M. Umehara, K. Yamada. The geometry of fronts. Ann. of Math, 2009.[4] K. Saji. Criteria for D4 singularities of wave fronts. Tohoku Math. J. (2) Vol.
63(1) Pg. 137-147, 2011.
On non-smooth perturbations of smooth systems
Thais B. DamacenaUniversidade Estadual de Campinas, Brazil
In modeling certain phenomena through di�erential equations, sometimes is necessaryto use discontinuous functions (for example, when there is sudden changes of state of thesystem). Mathematically speaking, if �r is the space of the Cr vector fields on a manifoldN , with boundary M , endowed with the Cr topology, X œ �r, f : M æ R be a CŒ
function having 0 as regular value and f≠1(0) = M , then we can consider the naturalembedding i : �r æ �r = �r ◊ �r (X œ �r æ (X, X) œ �r). We follow Filippov’sconvention to trajectories on M .
The main goal (motivated by some applications) is to study the perturbation of (X, X)in �r. In this way, we present the following special case where X is a smooth vector fieldwith a single critical point of focus type.

30 MAT70 ≠ VI Workshop on Dynamical Systems
Equilibrium points of the restricted three body problem withperturbed potential
Marcia Pragana Dantas, Hidelberto E. CabralUniversidade Federal de Pernambuco, Brazil
We study the e�ect of the oblateness of primaries on the equilibrium points in the spa-tial restricted three body problem with the more massive primary an spheroid. Recently,Markellos and Douskos, found two new equilibrium points, nearly above and bellow theoblate primary. We claim that there is no spatial equillibrium points.
Resonance parametric in the 4 + 2 restricted body problem
Lucia Brandao Dias, Hildeberto CabralúUniversidade Federal de Sergipe, Brazil
We study a especial case of the restricted n-body problem, called by us the restricted4 + 2 body problem. The equilibrium configuration which the 4 + 1 bodies with massform consists of one central mass encircled by 4 bodies located at the vertices of a square.The 4 bodies move in elliptical orbits around the center of mass of the system. In thisproblem there are two parameters, that is, the mass of the 4 bodies, denoted by µ, andthe eccentricity of the elliptic orbit, denoted by Á. We consider the dynamics of aninfinitesimal mass under the influence of such a configuration. The parametric resonanceis investigated and the stability of a equilibrium point.
úUniversidade Federal de Pernambuco, Brazil.
A version of Poincare-Bendixson Theorem for DiscontinuousVector Fields
Rodrigo D. EuzebioDepto de Matematica, IBILCE, UNESP
Our goal is to present a version of the Poincare-Bendixson Theorem for discontinuousvector fields and discuss some points about that. In fact, consider V be an arbitrarily smallneighborhood of 0 œ R2, f : V æ R a smooth function having 0 œ R as a regular value,

MAT70 ≠ VI Workshop on Dynamical Systems 31
� = f≠1(0) and �c and �t the sewing and tangential sets of �, respectively. Consideralso that � = �c fi �t. It means that there is no sliding motion on �. In such case, weshow that a result similar to the classical Poincare-Bendixson Theorem can be stated onlyadding some weak hypothesis on �. Namely, we obtain the following theorem.
Theorem. Let Z = (X, Y ) and assume that Z does not have sliding motion and it hasa global trajectory �
Z
(t, p) whose positive trajectory �+Z
(t, p) is contained in a compactsubset K µ V . Suppose also that X and Y have a finite number of critical points in K,no one of them in �, and a finite number of tangency points with �. Then, the Ê-limitset Ê(�
Z
(t, p)) of �Z
(t, p) is one of the following objects:
(i) an equilibrium of X or Y ;
(ii) a periodic orbit of X or Y ;
(iii) a graph of X or Y ;
(iv) a pseudo-cycle;
(v) a pseudo-graph;
(vi) a s-singular tangency.
Additionally, we will show that by considering sliding and/or escaping regions on � wemay verify that occurrence of non-trivial minimal sets in planar systems. In particular,it means that we can not generalize the Poincare-Bendixson Theorem presented herewithout assuming extra hypothesis. This is a joint work with Claudio Buzzi and Tiagode Carvalho
On the maximum number of limit cycles associated to apiecewise linear di�erential systems on R3
Bruno Rodrigues de Freitas, Joao Carlos MedradoUniversidade Federal de Goias, Brazil
One of the classic problems in qualitative theory of di�erential equations is given avector field, how to determine the maximum number of its limit cycles. In this work weconsider the piecewise linear vector field expressed by

32 MAT70 ≠ VI Workshop on Dynamical Systems
Z = X + Y
2 + sgn(h(x, y, z))X ≠ Y
2 ,
where X and Y are linear on R3, h(x, y, z) = z and
sgn =Y]
[1, if ‘ > 0,
≠1, if ‘ < 0
In our approach, the vector field Z has in q = {(x, y, z) œ R3; z = 0} only sewingpoints and a unique singular straight line. We obtain results about the maximum numberof limit cycles in this problem.
Configuracoes Principais e a Geometria dos Campos de Vetores
Alacyr Jose GomesUniversidade Federal de Goias, Brazil
Dado um campo de vetores ÷ = (÷1(s, v, w), ÷2(s, v, w), ÷3(s, v, w)) nao nulo em R3,definimos a curvatura normal de ÷ na direcao dr = (ds, dv, dw), por k
n
(dr) = ≠ Èd÷,drÍdr
2 ,onde dr e um vetor do plano È÷, drÍ = 0, ver [Yu00].
Analogamente a teoria de superfıcies, a funcao kn
(dr) que depende da direcao dr
tem direcoes crıticas, que sao denominadas direcoes principais, as curvas tangebtes aessas direcoes sao denominadas linhas de curvaturas cujo sistema de equacoes que ascaracterizam e
2(d÷, dr, ÷) + È÷, rot÷Ídr2 = 0
È÷, drÍ = 0(1)
Na carta (s, v, w), podemos interpretar este sistema como um sistema de equacoesdiferenciais implıcitas do tipo
L(s, v, w)dw2 + M(s, v, w)dwdv + L(s, v, w)dv2 = 0,
÷1(s, v, w)ds + ÷2(s, v, w)dv + ÷3(s, v, w)dw = 0.(2)
que aparece em trabalho como [JS13].Neste trabalho iremos fazer um breve estudo qualitativo das singularidades do sistema
de equacoes (2), quando as funcoes coordenadas do campo ÷ forem funcoes lineares.
MAT70 ≠ VI Workshop on Dynamical Systems 33
[JS13] D. Lopes J. Sotomayor, R. Garcia. Partially umbilic singularities of hypersur-faces of R4. Preprint, 2013.
[Yu00] Aminov Yu. The Geometry of Vector Fields. Gordon and Breach SciencePublishers, The Netherlands, 2000.
Limit Cycles of Planar Systems Bifurcating from a PeriodAnnulus
Otavio Gomide, Ricardo Miranda MartinsUniversidade Estadual de Campinas, Brazil
The study of limit cycles is a very important research topic due to its applicationsin Physics and Engineering. The analysis of the number of limit cycles bifurcating froma polynomial planar system is an interesting problem that is motivated by the sixteenthHilbert’s problem and one of the most e�cient tools to attack it is the averaging theory.
In this work we present the averaging method and a manner to apply this theory forfinding limit cycles bifurcating from planar autonomous system with a period annulus.
In particular, we will exhibit the maximum number of limit cycles that bifurcate froman isochronous center perturbed by forth degree general polynomials and we explain howthis example can produce a generic result for isochronous quadratic centres.
The set of periods of periodic homeomorphisms of some pinchedsurfaces
Marcio GouveiaUniversidade Estadual Paulista Julio de Mesquita Filho, Brazil
In this work we characterize all the possible sets of periods of a periodic homeomor-phism f defined on some classes of compact connected pinched surfaces.

34 MAT70 ≠ VI Workshop on Dynamical Systems
The Role of Zaslavskii Chaotic Map in Global Optimization
Tayed HamaiziaUniversity Constantine, Algeria
Theory of chaos is one of the most important achievements of nonlinear system re-search. In most optimization methods such as the COA , variables chaos generated bydi�erent types of applications such as the Logistic, the application Tent, Lozi, Ikeda andothers have shown very interesting results that random application. The main idea is toimprove the convergence of the optimization chaotic. In this paper, a chaotic strategy isproposed based on a Zaslavskii map chaotic.
Singularities in the Geometric Theory of Hamiltonian Systemswith Constraints
Konstantinos KourliourosImperial College London, United Kingdom
In this talk we study some local classification problems arising in the theory of Hamil-tonian systems with constraints. Any such system can be defined geometrically as aquadruple (N, �, H, M), where N is a symplectic manifold with symplectic form (thephase space), H is a Hamiltonian function and M is a submanifold representing theconstraints. The singularities of such systems are defined, in principle, by the relativepositions of the submanifold M with the Hamiltonian system (�, H) and in particularby the pair (Ê, h), h), where Ê is the restriction of the symplectic form � on M andh is the restriction of the Hamiltonian function on M . We will show that apart fromthe regular case where Ê is of maximal rank and h is non-singular and transversal tothe characteristic foliation of Ê (if non-empty), all the other singularities (of codimensionØ 1) contain functional moduli. In the special case where the constrained submanifoldis 2≠dimensional and the Hamiltonian function h has only isolated singularities we willshow, using techniques from the Gauss-Manin theory of isolated singularities, that thesemoduli can be described completely in terms of the action integrals of a primitive – andÊ along the vanishing cycles of the singularity h. This leads in turn to a least of normalforms for the constrained Hamiltonian system (Ê, h) and eventually, to a list of normalforms for the corresponding singular Lagrangians (i.e. of first order in the velocities)

MAT70 ≠ VI Workshop on Dynamical Systems 35
L = – ≠ h. Finally, we give some applications from high energy physics, control theoryand hydrodynamics, where the corresponding constrained Hamiltonian systems (singularLagrangians respectively) fit exactly in the geometric framework described above.
3≠dimensional periodic orbits of the Henon-Heiles Potential
Maite Kulesza, Jaume Llibreú
Universidade Federal Rural de Pernambuco, Brazil
We study analytically families of periodic orbits for the Henon–Heiles HamiltoniansH(x, y, z, p
x
, py
, pz
) = (px2 + py2 + pz2 + x2 + y2 + z2)/2 + B(y2 + z2)x + Ax3/3 with3 degrees of freedom. First, after introducing a scale transformation in the coordinatesand momenta with a parameter Á. Then the conditions for finding families of periodicorbits, using the averaging theory up to first order in Á, apply equally to system in everyenergy level H = h > 0. Our goal is to study the periodic orbits of the correspondingHamiltonian di�erential system using the averaging theory.
ú Universitat Autonoma de Barcelona, Spain.
Structural Stability of NSDS around a typical singularity
Juliana LarrosaUniversidade Estadual de Campinas, SP, Brazil
Consider the nonsmooth dynamical systems derived from the equation x = F (x) +sgn(f(x)) · G(x), where x œ R2, F and G belong to Xr(R2), with r Ø 1 and f is a smoothfunction defined in an origin neighbourhood with f(0) = 0.
The set � = f≠1{0} is the discontinuity set, since changes on the f sign imply dramaticchanges on the system dynamics. The case for which the origin is a regular point for f
has been largely studied.In this work we focus on the classification of structurally stable NSDS when f is a
Morse Function around the origin. We present the classification obtained by consideringf(x, y) = x · y.

36 MAT70 ≠ VI Workshop on Dynamical Systems
As a future work, we intend to keep the condition of f being a Morse function andconsider � = f≠1(⁄) with ⁄ π 1 and then the discontinuity set will be a hyperbole or acircle.
Approximate Controllability of the Semilinear Heat Equationwith Memory and Delay
Hugo Leiva, Nelson Merentesú
Universidad de los Andes, Chile
In this paper we apply Rothe’s Type Fixed Point Theorem to prove the interior ap-proximate controllability of the following semilinear Heat Equation with Memory andDelayY____]
____[
ˆz(t, x)ˆt
= �z(t, x) + 1Ê
u(t, x) +⁄
t
0f(s, z(s ≠ r, x), u(s, x))ds, in (0, · ] ◊ �,
z = 0, on (0, ·) ◊ ˆ�,
z(s, x) = „(s, x), s œ [≠r, 0], x œ �,
where � is a bounded domain in RN(N Ø 1), „ : [≠r, 0]◊� æ R is a continuous function,Ê is an open nonempty subset of �, 1
Ê
denotes the characteristic function of the set Ê,the distributed control u belongs to L2([0, · ]; L2(�; )) and the standard notation z
t
(x)defines a function from [≠r, 0] to R by z
t
(x)(s) = z(t + s, x), ≠r Æ s Æ 0. Here r Ø 0 isthe delay and the nonlinear function f : [0, · ] ◊ R ◊ R æ R is smooth enough and thereare b, c œ R and 1
2 Æ — < 1 such that
|f(t, z, u)| Æ c|u|— + b, ’u, z œ R.
Under this condition we prove the following statement: For all open nonempty subsetÊ of � the system is approximately controllable on [0, · ]. Moreover, we could exhibita sequence of controls steering the nonlinear system from an initial state „(0, ·) to an ‘
neighborhood of the final state z1 œ L2(�) at time · > 0.ú Universidad Central de Venezuela, Venezuela.

MAT70 ≠ VI Workshop on Dynamical Systems 37
Normally Hyperbolic Sets in Discontinuous Dry FrictionOscillators
Maurıcio Lima, J. Cassiano, A. FonsecaUniversidade Federal do ABC, Brazil
We study a four parameters piecewise-smooth dry friction oscillator from Control the-ory. Using Filippov’s convention we obtain the existence of a codimension-1 bifurcationwhich gives rise to a normally hyperbolic set composed by a family of attracting cylin-ders. This bifurcation exhibits interesting discontinuous oscillation phenomena and is aphenomena that can not be found in a continuous problem.
Degenerate resonances in planar systems with small negativedivergence and their stability
Irina MartynovaVoronezh State University of Engineering Technologies, Russia
We consider classical results about bifurcation of asymptotically stable T-periodic so-lutions in analytic di�erential equations from a T-periodic cycle of the reduced system.These results are usually attributed to Bogolyubov, Malkin, Melnikov and Loud, wherethe bifurcation conditions are formulated in terms of the derivative of the respective bi-furcation function. We show that the classical conditions for bifurcation can be relaxed aslong as divergence of the whole system is negative. The relaxed assumption is formulatedin terms of the topological degree of the respective bifurcation function with no deriva-tives involved. The work is supported by the grant 13-01-00347 of Russian Foundation ofBasic Research.
38 MAT70 ≠ VI Workshop on Dynamical Systems
Uniqueness of limit cycles for sewing planar piecewise linearsystems
Joao Carlos Medrado, Joan TorregrosaUniversidade Federal de Goias,
This paper proves the uniqueness of limit cycles for sewing planar piecewise linearsystems with two zones separated by a straight line, q, with only one q-singular pointof monodromic type.
AcknowledgmentsThe first author is partially supported by the CNPq and CAPES. The second author
is partially supported by the MICIIN/FEDER grant number MTM2008-03437 and by theGeneralitat de Catalunya grant number 2009SGR410. Both authors are also supportedby the joint project CAPES-MECD grant 4782 and PHB2009-0025-PC
Funcao de Melnikov em Sistemas Dinamicos Descontınuos
Joao Paulo Ferreira de MelloUniversidade Federal do ABC, Brazil
Nos ultimos anos, a area de Sistemas Dinamicos Descontınuos tem tido grande desen-volvimento. O grande numero de fenomenos que podem ser modelados com tais sistemasmostra a importancia do tema. Para estudarmos estes sistemas podemos adaptar tecnicasconhecidas no caso contınuo para o caso descontınuo.
Uma das tecnicas bem conhecidas no caso contınuo e o chamado metodo de Melnikov.Tal tecnica tem por objetivo estudar a persistencia de solucoes periodicas, homoclınicase heteroclınicas em sistema dinamico perturbado.
Como exemplo, consideramos um Sistema Dinamico Hamiltoniano com uma conexaoheteroclınica (como, por exemplo, o pendulo simples) e o perturbamos. A pergunta quesurge e: sobre quais condicoes as conexoes heteroclınicas sao persistentes? Tal estudoconsiste em analisar a funcao de Melnikov. Essa funcao, de uma certa forma, mede adistancia entre as variedades estavel e instavel dos pontos de sela. E possıvel tambem usara funcao de Melnikov para estudarmos a persistencia de orbitas periodicas nos sistemasperturbados.
MAT70 ≠ VI Workshop on Dynamical Systems 39
Este trabalho propoe adaptar a teoria das funcoes de Melnikov do caso contınuo para ocaso descontınuo. A variedade de descontinuidade e usada como uma seccao de Poincare,e a partir daı, construımos uma aplicacao de primeiro retorno e a funcao de Melnikovpara o entendimento do sistema perturbado.
As tecnicas utilizadas neste trabalho foram inspiradas no trabalho [1].
[1] A.Granados, S.J.Hogan, T.M.Seara. The Melnikov Method and Subharmonic Or-bits in a Piecewise-Smooth System. SIAM J. Applied Dynamical Systems. v.11, n.3,p.801-830, 2012.
An arbitrary number of limit cycles for a class of planardiscontinuous piecewise linear di�erential systems with two
zones
Luis Fernando MelloUniversidade Federal de Itajuba, Brazil
For any given positive integer n we show the existence of a class of discontinuous piece-wise linear di�erential systems with two zones in the plane having exactly n hyperboliclimit cycles. Moreover, all the points on the separation boundary between the two zonesare of sewing type, except the origin which is the only equilibrium point.
This is a joint work with D.C. Braga.
Ciclos limites para sistemas diferenciais quadraticosdescontınuos com duas zonas
Ana O. Mereu, Jaume Llibreú
Universidade Federal de Sao Carlos, Brazil
Neste trabalho estudamos o numero maximo de ciclos limites dados pela Teoria deAveraging de primeira ordem para sistemas descontınuos, que podem bifurcar das orbitasperiodicas dos centros isocronos x = ≠y + x2, y = x + xy e x = ≠y + x2 ≠ y2, y = x + 2xy
quando sao perturbados na classe de todos os sistemas diferenciais polinomiais quadradicosdescontınuos com a linha de descontinuidade y = 0.
40 MAT70 ≠ VI Workshop on Dynamical Systems
Comparando os resultados obtidos para sistemas diferenciais polinomiais quadraticosdescontınuos com os resultados para contınuos, este trabalho mostra que os sistemasdescontınuos possuem pelo menos 3 ciclos limites a mais em torno da origem que oscontınuos.
ú Universitat Autonoma de Barcelona, Spain.
Julia sets of a class of C2 maps
Ali MessaoudiUniversidade Estadual Paulista Julio de Mesquita Filho, Brazil
In this work, we study dynamical and topological properties of Julia sets associated to aclass of C2 endomorphisms. Precisely, we consider the C2 map f
c
(x, y) = (xy+c, x) (wherec is a fixed complex number) and the filled Julia set K
c
= {z œ C, fn
c
(h(z), z) is bounded }where h(z) is a fixed complex polynomial. We prove that K
c
is a non empty compact setsuch that C \ K
c
is connected set. Moreover, Kc
is a quasi-disk, whenever |c| is small. Wealso study dynamical properties of f
c
.
Normal forms of Polynomial di�erential systems in R3 having aninvariant quadric
Marcelo Messias, J. Llibreú and A. C. Reinolúú
Universidade Estadual Paulista, Presidente Prudente, Sao Paulo, Brazil
We give the normal forms of all polynomial di�erential systems in R3 which have a non–degenerate or degenerate quadric as an invariant algebraic surface. We also characterizeamong these systems those which have a Darboux invariant constructed uniquely usingthe invariant quadric, giving explicitly their expressions. As an example we apply theobtained results in the determination of the Darboux invariants for the Chen system withan invariant quadric.
ú Universitat Autonoma de Barcelona, Spain.úú Universidade Estadual Paulista, Presidente Prudente, Sao Paulo, Brazil.

MAT70 ≠ VI Workshop on Dynamical Systems 41
Limit cycles for a class of continuous and discontinuous cubicpolynomial di�erential systems
Jaime Rezende de MoraesIBILCE, UNESP-Sao Jose do Rio Preto
We study the maximum number of limit cycles that bifurcate from the periodic solu-tions of the family of isochronous cubic polynomial centers
x = y(≠1 + 2–x + 2—x2), y = x + –(y2 ≠ x2) + 2—xy2, – œ R, — < 0,
when it is perturbed inside the classes of all continuous and discontinuous cubic poly-nomial di�erential systems. We obtain that the maximum number of limit cycles whichcan be obtained by the averaging method of first order is 3 for the perturbed continuoussystems and for the perturbed discontinuous systems at least 12 limit cycles can appear.
Persistence in Dynamical Systems
Anna Paula Oliveira, Kennedy PedrosoUniversidade Federal de Vicosa
The aim of this work is to present the persistence theory, which mainly deals with thetopology of attractors and repellers for flows defined on locally compact metric spaces. Anapplication of this theory occurs in Nonlinear Systems of Ordinary Di�erential Equations(ODEs). To start the study of the phase portrait of these ODEs, the classical theory tellsus to find the equilibrium points of the system , classify them locally and build a Lyapunovfunction to globalize this classification . However, for most systems, there are obviousdi�culties even to find the equilibrium points . If the interest is to study closed subsets ofphase space having a repulsive invariant boundary and interior global attractors, we mayconsider the Persistence Theory, because the existence of an interior equilibrium point ina certain set, is a direct consequence, under certain assumptions, of uniformly persistentin this set.

42 MAT70 ≠ VI Workshop on Dynamical Systems
The center problem for a 1 : ≠4 resonant quadratic system
Regilene OliveiraUniversidade de Sao Paulo - ICMC, Brazil
The main object of our study is to find necessary and su�cient conditions for a centerat the origin for 1 : ≠4 resonant system of the form
x = x ≠ a10x2 ≠ a01xy ≠ a12y
2, y = ≠4y + b21x2 + b10xy + b01y
2.
There appear 46 center conditions for a10 = 1 and 9 conditions for a10 = 0. The necessaryconditions are obtained using modular arithmetics. The su�ciency of each obtainedcondition is proven using a local analytic first integral - to find it or prove its existencedistinct criteria are used. This is a joint work with B. Fercec, J. Gine, M. Mencinger.
The T-Singularity in Power Eletronics
Daniel J. Pagano, Rony CristianoFederal University of Santa Catarina, Brazil
Over the last two decades, the T-point or Teixeira’s Singularity was deeply studiedin the non- smooth dynamical system’s area. However, only few real dynamical systemsshowing this singularity have been reported in the literature of the area. In this work,the T -Singularity is studied in a power electronic circuit (boost converter) showing theexistence of crossing limit cycles that birth from the T -Point. The crossing limit cyclearises when, by varying a parameter, a pseudoequilibrium belongs to the attractive slidingregion collides with an invisible twofold point (Teixeira’s Singularity), and crosses to therepulsive sliding region becoming a pseudo-saddle. This limit cycle crosses the switchingboundary from a vector field to another. A bifurcation set of the boost converter circuitis shown in order to characterize the dynamical circuit behavior subject to load changes.

MAT70 ≠ VI Workshop on Dynamical Systems 43
A family of reversible quadratic polynomial vector fields on S2
Weber F. Pereira, Claudio PessoaDepartment of Mathematics, Universidade Estadual Paulista, Brazil
We study a class of quadratic reversible polynomial vector fields on S2 with (3, 2)-typereversibility. We classify all isolated singularities and we prove the nonexistence of limitcycles for this class. Our study provides tools to determine the phase portrait for thesevector fields.
Piecewise Smooth Vector Fields on the tridimensional space atInfinity
Claudio PessoaUniversidade Estadual Paulista, Brazil
In this work we study the dynamic at infinity of a piecewise smooth vector fields onR3. We consider the degree one polynomial expressions of the piecewise smooth vectorfields and provide conditions on the parameters to get local bifurcations of codimensionzero and one at infinity. These results can be useful to understand the global dynamic ofpiecewise smooth vector fields. As a applications we study two models of theory controland in one them we showed the existence of limit cycles at infinity.
The Hopf Bifurcation in the Shimizu-Morioka System
Claudio PessoaUniversidade Estadual Paulista, IBILCE, Brazil
We study the local Hopf bifurcations of codimension one and two which occur in theShimizu-Morioka system. This system is a simplified model proposed for studying thedynamics of the well known Lorenz system for large Rayleigh numbers. We present an an-alytic study and their bifurcation diagrams of these kinds of Hopf bifurcation, showing thequalitative changes in the dynamics of its solutions for di�erent values of the parameters.

44 MAT70 ≠ VI Workshop on Dynamical Systems
The complete study of quadratic systems with irreducibleinvariant hyperbolas
Alex Carlucci RezendeUniversidade de Sao Paulo, ICMC, Brazil
In this poster we consider the class QSf of all quadratic systems possessing a finitenumber of singularities (finite and infinite). A quadratic polynomial di�erential systemcan be identified with a single point of R12 through its coe�cients. Herein, using thealgebraic invariant theory, we provided necessary and su�cient conditions for a systemin QS
f
to have irreducible invariant hyperbolas in terms of its coe�cients. We alsoconsidered the number and multiplicity of such irreducible hyperbolas. We give here theglobal bifurcation diagram of the class QSf of systems with invariant hyperbolas. Thebifurcation diagram is done in the 12≠dimensional space of parameters and it is expressedin terms of polynomial invariants. The results can therefore be applied for any familyof quadratic systems in this class, given in any normal form. This is a joint work withRegilene Oliveira and Nicolae Vulpe.
Bounds for the bifurcation set of a 2-Parameter Family ofPlanar Systems
Luci Any RobertoUniversidade Estadual Paulista, Brazil
We consider the family of planar systems depending on two parametersY]
[x = y
y = ”1x + ”2y + x3 ≠ x2y(1)
with ”1, ”2 œ R. This family has a limit cycle which disappears at a heteroclinic connectionfor the parameter values on the curve
”2 = C(”1) = ≠”15 + O(”1), ”1 < 0.
With the method introduced in [GGT] we prove that on a neighborhood of (0, 0) the

MAT70 ≠ VI Workshop on Dynamical Systems 45
curve of bifurcation satisfies
≠”15 + 16
13125”21 + b”3
1 < C(”1) < ≠”15 + 16
13125”21 + B”3
1
for any b < ≠ 5536103359375 < B.
This is a joint work with Joan Torregrosa (UAB) and Paulo Ricardo da Silva (Ibilce-UNESP).
[GGT] Gasull, A., Giacomini, H. and Torregrosa, J. (2010). Some results on homoclinicand heteroclinic connection in planar systems, Nonlinearity 23, 2977–3001.
[Ku] Y.A. Kuznetsov, Elements of Applied Bifurcation Theory 2o. ed. Applied Math-ematical Sciences, (New York: Springer) 112 (1998).
First- and second-order analysis of the time-optimal trajectoriesin the Reeds and Shepp problem with free final direction
Ivan Samylovskiy, Andrei DmitrukLomonosov Moscow State University, Russia
Consider the following optimal control problem:Y________]
________[
x = u sin Ï, x(t0) = 0, x(T ) = xT
,
y = u cos Ï, y(t0) = 0, y(T ) = yT
,
Ï = v, Ï(t0) = 0, Ï(T ) is free,
|u| Æ 1, |v| Æ 1, J = T æ min.
(1)
Here we have three state variables x, y, Ï, and two controls u, v. The pair (x, y)determines a position of the point on the plane, Ï is the angle between its velocity (x, y)and the ordinate axis. The initial time instant t0 is fixed.
This problem (with a fixed direction of the velocity both at the initial and at the finalmoment) was stated by Reeds and Shepp [2], where all possible extremals were described.It was then studied by many authors (e.g. [3], [5], [6], [7]); a complete synthesis for theproblem with a fixed final direction was given in [3]. Here we consider this problem with afree final direction Ï(T ), i.e., the point should be driven, in a shortest time, at a prescribedposition, no matter from which direction it is done. We present the construction of an
46 MAT70 ≠ VI Workshop on Dynamical Systems
optimal synthesis for problem (1) using necessary (first-order) optimality conditions givenby the Pontryagin Maximum Principle. What is more, for some trajectories which are notglobally-optimal, but may be locally-optimal, we use second-order optimality conditionsgiven by [4] to have information about their local optimality.
[1] L.E. Dubins. On curves of minimal length with a constraint on average curvatue andwith prescribed initial and terminal positions and tangents, American J. of Mathematics,1957, vol. 79, p. 497–516.
[2] J.A. Reeds and L.A. Shepp. Optimal path for a car that goes both forwards andbackwards, Pacific J. of Mathematics, 1990, vol. 145, No 2, p. 367–393.
[3] P. Soueres and J.-P. Laumond, Shortest path synthesis for a car-like robot, IEEETrans. on Automatic Control, vol. 41, No 5, 1996, p. 672–688.
[4] H. Maurer, N.P. Osmolovskii, Second order su�cient conditions for time-optimalbang-bang control, SIAM J. on Control and Optimization, 2003, vol. 42, issue 6, p. 2239–2263
[5] V.S. Patsko and V.L. Turova, From Dubins’ car to Reeds and Shepp’s mobile robot,Computing and Visualization in Science, vol. 12, p. 345A-364, 2009.
[6] A.V. Dmitruk, I.A. Samylovskiy, Optimal synthesis in the Reeds and Shepp problemwith a free final direction, Journal of Dynamical and Control Systems, vol. 19, No 3,p. 309-325, 2013
[7] A.V. Dmitruk, I.A. Samylovskiy, Optimal Synthesis in the Reeds and Shepp Problemwith Onesided Variation of Velocity, Journal of Optimization Theory and Applications„vol. 158, No 3, p. 874-887, 2013.
Controlabilidade e acessibilidade de sistemas de controle
Cintia Ap. da Silva Scanholato, Ronan Antonio dos ReisDepartamento de Matematica e Computacao, FCT, Universidade Estadual Paulista,
Brazil
Este trabalho apresenta um estudo sobre a Teoria Geometrica de Controle, a qualteve um desenvolvimento importante com, entre outros, Sussmann em [2], [3] e Lobryem [4]. Um problema fundamental em sistemas de controle e o da controlabilidade dosistema, ou seja, o de saber se dados dois pontos do espacco de fase, sempre podemos irde um ponto ao outro atraves de uma trajetoria do sistema. Tem-se que a propriedade de
MAT70 ≠ VI Workshop on Dynamical Systems 47
controlabilidade implica em acessibilidade do sistema, ou seja, no sentido de que o interiordo conjunto dos pontos atingıveis a partir de qualquer ponto e nao vazio. Sob algumascondicoes, mostramos que a propriedade de acessibilidade implica em controlabilidade.
[1] Colonius, F. e Kliemann, W., The dynamics of control, Birkhauser, Boston, 2000.[2] Jurdjevic, V. and Sussman, H. J., Controllability of non linear systems, J. Difer-
ential Equations. 12 (1972), 95-116.[3] Jurdjevic, V. and Sussman, H. J., Control systems on Lie groups, J. Of. Di�. Eq.
12 (1972), 313- 329.[4] Lobry, C., Controlabilitty of nonlinear systems on compact manifolds, SIAM, Jour-
nal on Control, Vol. 12, no 1 (1974) 1-4. 6.[5] San Martin, L. A. B., Orbitas de Famılias de Campos de Vetores, Unicamp, 1998.
Regularization and Singular Perturbation Techniques forNon-Smooth Systems
Paulo Ricardo SilvaUniversidade Estadual Paulista, Brazil
This work is concerned with some aspects of the qualitative- geometric theory ofNon-smooth Systems. We study the connection between the regularization process of non-smooth vector fields and the singular perturbation problems. As a matter of fact, the mainresults in our setting fill a gap between these areas. Exploiting such results, applicationsto singular perturbation problems with non-smooth reduced system are discussed.
Campo Descontınuo Nilpotente com Chaveamento em R4
Tharsis Souza Silva, Ronaldo Alves Garcia, Alain JacquemardUniversidade Federal de Goias, Brazil
Estudaremos o comportamento qualitativo de uma classe de campos de vetores de-scontınuos em dimensao 4. Na composicao dessa classe de campos de vetores esta en-volvida a funcao sinal, veja equacao (1), que faz com que este sistema seja com comutacao

48 MAT70 ≠ VI Workshop on Dynamical Systems
ou chaveamento.
sgn(t) =
Y___]
___[
1, se t > 0;0, se t = 0;
≠1, se t < 0.
(1)
Essa classe de campos de vetores e linear nilpotente e dada na equacao (2) abaixo
S
WWWWWWU
x
y
z
w
T
XXXXXXV=
S
WWWWWWU
y + –1z + –2w
z + ⁄w
w
a · sgn(x)
T
XXXXXXV(2)
O objetivo principal e encontrar condicoes, sob as quais existem orbitas periodicas ouqualquer outros elementos de natureza periodica. De fato e demonstrado a existencia deuma famılia a um parametro de orbitas periodicas, e e estudado a estabilidade dessasorbitas.
On Regularization of Volume-Preserving Systems piecewisely
Wender J. SouzaUniversidade Estadual de Campinas, SP, Brazil
In this work we study vector fields in Rn of the form:
X(p) =Y]
[X1(p) se f(p) Ø 0X2(p) se f(p) Æ 0
(1)
where f : Rn æ R is a Cr function, r Ø 1 and 0 is a regular value of f . Moreover, Xi
is a smooth vector field that preserves volume for i = 1, 2. We present necessary andsu�cient conditions for which a regularization of X is a volume-preserving vector field.Results about piecewise Hamiltonian Systems are also presented.
Piecewise smooth vector fields on R3
Durval TononUniversidade Federal de Goias, Brazil

MAT70 ≠ VI Workshop on Dynamical Systems 49
In this work we study the dynamic at infinity of a piecewise smooth vector fields onR3. We consider the degree one polynomial expressions of the piecewise smooth vectorfields and provide conditions on the parameters to get local bifurcations of codimensionzero and one at infinity. These results can be useful to understand the global dynamic ofpiecewise smooth vector fields. As a applications we study two models of theory controland in one them we showed the existence of limit cycles at infinity.
Invariant Measures for Cherry Flows
Edson VargasUniversidade de Sao Paulo, Brazil
We investigate the invariant probability measures for Cherry flows, i.e. flows on thetwo-torus which have a saddle, a source, and no other fixed points, closed orbits orhomoclinic orbits. In the case when the saddle is dissipative or conservative we showthat the only invariant probability measures are the Dirac measures at the two fixedpoints, and the Dirac measure at the saddle is the physical measure. In the other casewe prove that there exists also an invariant probability measure supported on the quasi-minimal set, we discuss some situations when this other invariant measure is the physicalmeasure, and conjecture that this is always the case. The main techniques used are thestudy of the integrability of the return time with respect to the invariant measure of thereturn map to a closed transversal to the flow, and the study of the close returns near thesaddle.
Joint work with Radu Saghin.
A Study of a One-Dimensional Optimal Control Problem with aPurely State-Dependent Cost
Anastasia K. Vdovina, A.V. DmitrukThe Faculty of Calculus Mathematics and Cybernetics,Moscow State University
The one-dimensional problem with a state-dependent cost is considered. It is provedthat under some assumptions the one can simplify the process of solution denying the Pon-tryagin’s maximum principle and applying some simple methods of the classical analysis.

50 MAT70 ≠ VI Workshop on Dynamical Systems
The main assumptions are unimodularity of the cost and dimension of the state vari-able, which allows the one to apply the Chyaplygin comparison theorem. Here obtainedsynthesis for the problem and its modifications.
MAT70 ≠ VI Workshop on Dynamical Systems
Maps

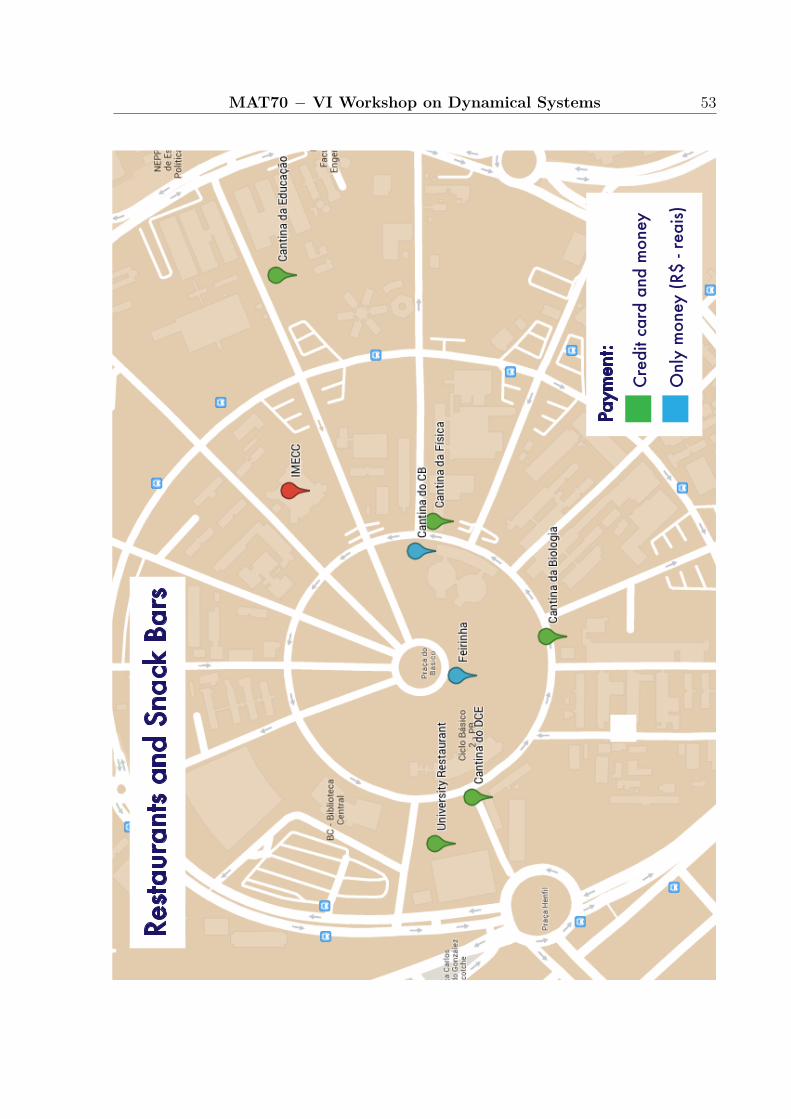
MAT70 ≠ VI Workshop on Dynamical Systems 53
Resta
ura
nts
and S
nack B
ars
Paym
ent:
Cre
dit c
ard
and m
oney
Only
money (
R$ - r
eais
)

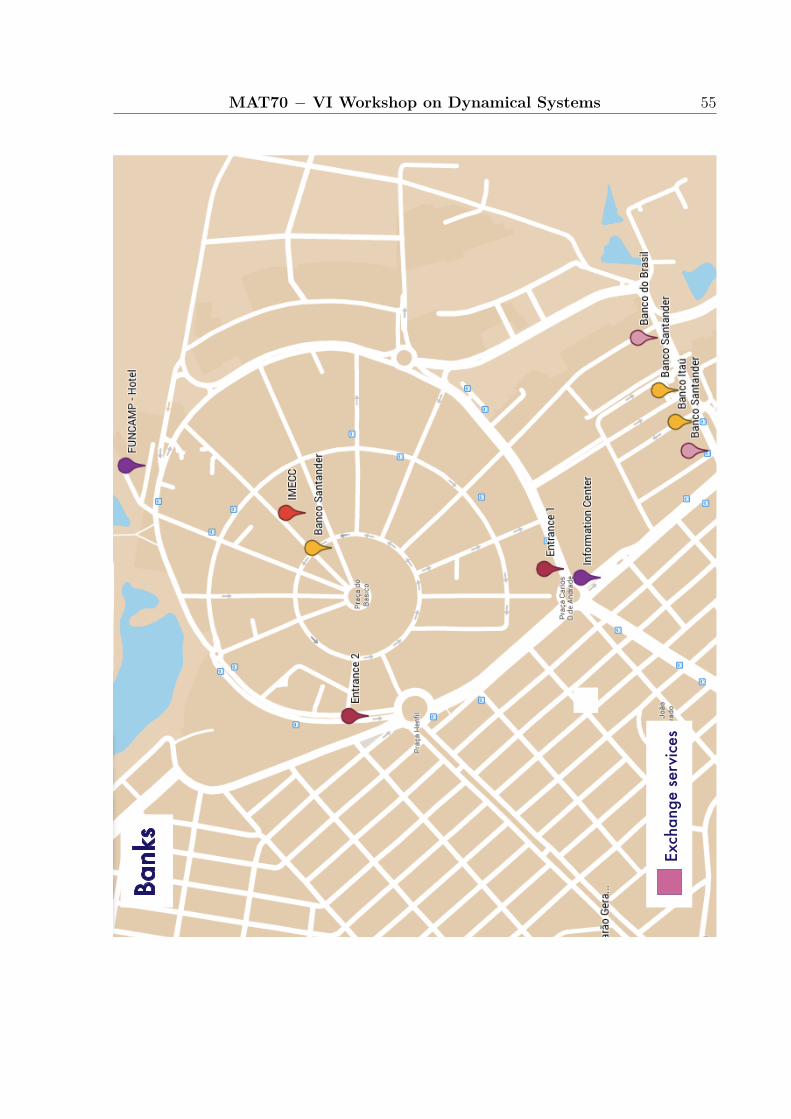
MAT70 ≠ VI Workshop on Dynamical Systems 55
Bank
s
Exch
ange
ser
vice
s

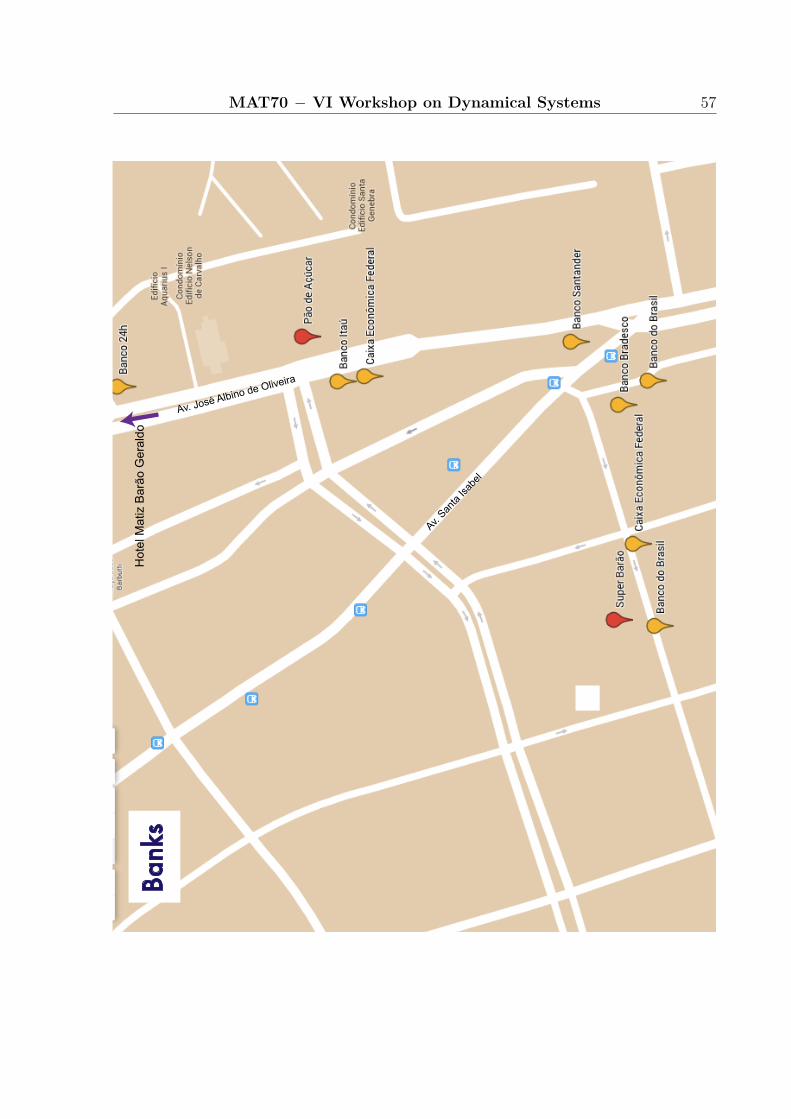
MAT70 ≠ VI Workshop on Dynamical Systems 57
Bank
s
Av. José Albino de Oliveira
Av. San
ta Isa
bel
Hot
el M
atiz
Bar
ão G
eral
do


MAT70 ≠ VI Workshop on Dynamical Systems
List of Speakers
Andrade, Kamila, 25Badreddine, Azzouzi, 25Benito, Ricardo, 26Braun, Francisco, 26Buzzi, Claudio, 26Cardin, Pedro T., 27Carneiro, Mario Jorge Dias, 3Carvalho, Tiago de , 27Cassiano, Jeferson, 28Cespedes, Oscar A.R., 28Chillingworth, David, 11Cima, Anna, 13Cruz, Douglas H., 29Damacena, Thais B., 29Dantas, Marcia Pragana, 30Dias, Lucia Brandao, 30Diaz, Lorenzo, 12Dumortier, Freddy, 12Euzebio, Rodrigo D., 30Freitas, Bruno Rodrigues de, 31Gasull, Armengol, 7Gomes, Alacyr Jose, 32
Gomide, Otavio, 33Gouveia, Marcio, 33Guardia, Marcel, 10Hamaizia, Tayed, 34Jacquemard, Alain, 4Jeffrey, Mike R., 9Koiller, Jair, 5Kourliouros, Konstantinos, 34Kulesza, Maite, 35Lamb, Jeroen S.W., 4Larrosa, Juliana, 35Leiva, Hugo, 36Lima, Maurıcio, 37Llibre, Jaume, 3Makarenkov, Oleg, 5Martynova, Irina, 37Medrado, Joao Carlos, 38Mello, Joao Paulo Ferreira de, 38Mello, Luis Fernando, 39Melo, Wellington, 14Mereu, Ana O., 39Messaoudi, Ali, 40
60 MAT70 ≠ VI Workshop on Dynamical Systems
Messias, Marcelo, 40Moraes, Jaime Rezende de, 41Oliveira, Anna Paula, 41Oliveira, Regilene, 42Pagano, Daniel J., 42Panazzolo, Daniel Cantergiani, 8Pereira, Weber F., 43Pessoa, Claudio, 43Ponce, Enrique, 17Ragazzo, Clodoaldo Grotta , 9Rezende, Alex Carlucci, 44Roberto, Luci Any, 44Samylovskiy, Ivan, 45
Scanholato, Cintia Ap. da Silva, 46Seara, Tere M., 11Silva, Paulo Ricardo, 47Silva, Tharsis Souza, 47Sotomayor, Jorge, 13Souza, Wender J., 48Tonon, Durval, 48Torregrosa, Joan, 11Torres, Francisco, 6Vargas, Edson, 49Vdovina, Anastasia K., 49Viana, Marcelo, 3Yang, Jiazhong, 7







![KAI SCHNEIDER arXiv:1603.05211v1 [math.NA] 16 Mar 2016 · §Universidade Estadual de Campinas (Unicamp), IMECC, Rua S´ergio Buarque de Holanda, 651, Cidade Universit´aria Zeferino](https://static.fdocuments.in/doc/165x107/5fd640d70d592e792f5504b5/kai-schneider-arxiv160305211v1-mathna-16-mar-2016-universidade-estadual-de.jpg)







