
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK 05 27 Indra ESA... · satellite-uav...
27
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK ESTEC (Noordwijk) 27th-28th May 2009 Workshop on Unmanned Aerial Systems and Satellite Services
Transcript of SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK 05 27 Indra ESA... · satellite-uav...

SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
ESTEC (Noordwijk)27th-28th May 2009
Workshop on Unmanned Aerial Systems and Satellite Services

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
2
INDEX
01 Index02 Project scope03 Objectives04 Satellite benefits to UAS missions05 Survey of European and Canadian UAS market06 Survey of current and planned UAS programmes07 UAS and airspace integration (EDA Air4All initiative)08 Questionnaire results09 Driven requirements for integration of satellite and UAS10 Driven system architectures11 Trade-off criteria12 Conclusions
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
3
PROJECT SCOPE
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
Satellite-UAS collaborative mission can be defined as any mission where the satellite and the UAS extend the capabilities of each other:
Missions where the space segment provides assistance for the UAS navigation and surveillance
Missions where the space segment acts as a relay for routine operation communications (BLOS), e.g. relay command and control, ATC, …
Missions where the space segment serves as a relay for data collected by UAV payload (BLOS).
Missions where the UAV serves as a communication relay for the satellite data in areas with difficult access such as urban areas.
Missions where the satellite-UAV collaboration is implemented on the ground by the fusion of the information produced separately by the satellite and the UAV, e.g. the exploitation of images with different resolution from space and air

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
4
OBJECTIVES
To provide a survey of ongoing and planned civil and security European and Canadian UAS programmes requiring cooperative missions between satellites and UAS
To investigate the feasibility and benefit of a dedicated European satellite capability to support UAS missions while meeting their requirements
To provide feasible system architectures supporting the synergy of UAS and satellites technologies in the domains of:
BLOS communications Precision satellite-based global positioning Integration of UAS in ATM airspace Service specific missions requiring concurrent use of satellites and UAS
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
5
SATELLITE BENEFITS TO UAS MISSIONS (I) Satellites benefit UAS in two ways:
Providing CNS (Communications, Navigation, Surveillance) services Complementing/enhancing UAS capabilities by performing joint
missions.
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
HighHighHighHighHALE / HAP
HighHighHighHighMALE
MediumMediumMediumHighTactical
MediumLowMediumHighMini
LowLowLowHighMicro
Cooperative Surveillance
Payload Comms.
Safety Comms.Navigation/
Positioning
Satellite Services for UASUAS Category
CNS services to UAS: In general, services are mature for all UAS Navigation/Positioning, as well as for Communications and Cooperative Surveillance for MALE/HALE/HAP UAS.

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
6
SATELLITE BENEFITS TO UAS MISSIONS (II) Joint Satellite-UAS missions:
The integration of satellites and UAS has the potential of unique civil and security global missions, including time-critical and life-critical operations
The synergy UAS-Satellite stem from their complementary characteristics with regards to the capability to provide data to the operators or users
Strengths of one system can balance weaknesses of the other system
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
WorseBetterHeterogeneity of quality for the same service
WorseBetterData/Service Cost to Users
BetterWorseMaintainability and upgrade of the system and payload
WorseBetter“Pre-conflict” data availability
BetterWorseReal Time (direct use of data and response time of the system)
BetterWorseFlexibility (to change mission parameters, type of payload, …)
BetterWorseAvailability (when and where required)
BetterWorseResolution (e.g. atmospheric effects on resolution)
WorseBetterArea Coverage
UASSatelliteCharacteristic

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
7
SURVEY OF EUROPEAN AND CANADIAN UAS MARKET (I)
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
In 2008 1100+ Unmanned Aircrafts were produced worldwide by main UAS manufacturers Europe: 6% Canada: 0.3 %
Nearly 1000 referenced models of all UAS classes worldwide: Europe: 27.3% Canada: 0.5%
NOTE: Most referenced UAS are Defence oriented but dual use is possible in most cases
Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
8
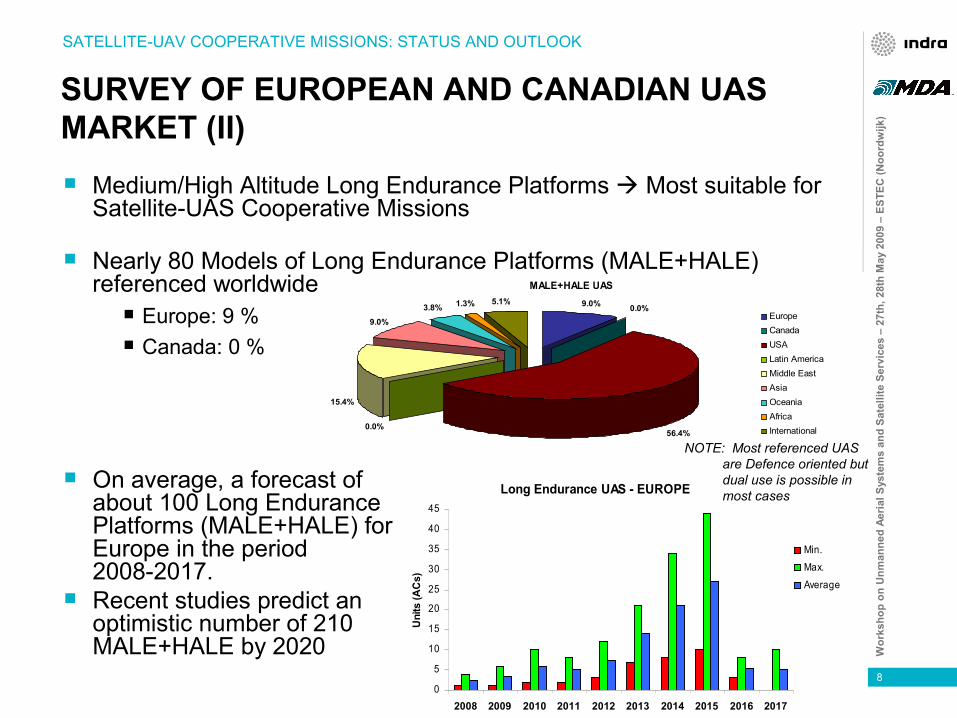
Medium/High Altitude Long Endurance Platforms Most suitable for Satellite-UAS Cooperative Missions
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
MALE+HALE UAS9.0% 0.0%
56.4%0.0%
15.4%
9.0%
3.8%5.1%1.3%
EuropeCanadaUSALatin AmericaMiddle EastAsiaOceaniaAfricaInternational
Nearly 80 Models of Long Endurance Platforms (MALE+HALE) referenced worldwide
Europe: 9 % Canada: 0 %
Long Endurance UAS - EUROPE
0
5
10
15
20
25
30
35
40
45
2008 2009 2010 2011 2012 2013 2014 2015 2016 2017
Uni
ts (A
Cs)
Min.
Max.
Average
On average, a forecast of about 100 Long Endurance Platforms (MALE+HALE) for Europe in the period 2008-2017.
Recent studies predict an optimistic number of 210 MALE+HALE by 2020
SURVEY OF EUROPEAN AND CANADIAN UAS MARKET (II)
NOTE: Most referenced UAS are Defence oriented but dual use is possible in most cases

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
9
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
MALE/HALEMALE/HALE/HAPMALE/HALE/HAPHALE/HAPHALE/HAP
Border Surveillance / CoastguardEmergency / Disaster MonitoringForestry Monitoring / Fire SpottingEarth Observation / Scientific missionsCommunications & Broadcasting
Most suitable UAS for Coop. MissionMission
SURVEY OF CURRENT AND PLANNED UAS PROGRAMMES
Typical missions for Satellite-UAS cooperation:
More than 20 types of planned/envisioned UAS-satellite cooperative missions, and at least 10 types already conducted or being conducted as “pilot” experiences.
Due to the challenges of UAS integration into non-segregated airspace, first established missions will be (and already are) governmental (e.g. security/surveillance, emergencies, fire-fighting …) and scientific/EO as they can be conducted in segregated/restricted airspace, above mean traffic or remote/sparsely populated areas.
Most UAS (MALE/HALE) from the Defence world but they can be dual purpose (Military/Civil)

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
10
UAS AND AIRSPACE INTEGRATION (EDA AIR4ALL INITIATIVE) (I) Hurdles to UAS airspace integration:
Internationally harmonised regulatory and standardisation framework for UAS
Airspace and ATM system evolution to cope with the increasing demand of airspace users, among them the Unmanned Aviation community
Reliability of UAS and the safety of their operations Effective and affordable collision avoidance system capable of
detecting both cooperative (transponder equipped) and non-cooperative (non-transponder equipped) traffics
Frequency spectrum allocation and sufficient bandwidth availability for UAS operations
Security in UAS operations Insurance liability costs Adequate business cases for UAS operations Social barriers: public apprehension or rejection of UAS and resistance
from existing airspace users
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
11
UAS AND AIRSPACE INTEGRATION (EDA AIR4ALL INITIATIVE) (II)
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
Accuracy, Reliability4.1 Public acceptance4. Transversal issues
3.2. Security of ground station
Remote training via Sat.3.1. UAS pilot / Commander training3. Procedures and training
2.2 Agreed rules and regulations with authorities
2.1 Harmonized military process2. Rules and regulations
Others (not UAS specific / addressed in the study): 1.11. Interoperability; 1.13. Operator interface; 1.14. Visual landmark and obstacle avoidance
Meteo Satellites1.10. Weather detection and protectionEnvironmental
1.12. Autonomous behaviour / decision making
1.9. Automatic taxiing GNSS1.8. Automatic take off /landing systemsAutonomous /
Automatic operations
BLOS Comms.1.7. Health monitoring/Fault Detection
GNSS1.6. Dependable emergency recovery (including forced landings)
Platform management
Voice Relay1.5. ATC interface
1.4. Radio bandwidth allocation
BLOS Comms.1.3. Secure and sustainable communications for Command and Control (C2)
Communications
1.2. Collision avoidanceGNSS, BLOS Comms.
1.1.SeparationTraffic separation and collision avoidance
1. Technical
Satellites contribution to overcome challengesChallenges identified by

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
12
QUESTIONNAIRE – RESULTS OVERVIEW Survey conducted among Stakeholders:
UAS and payload manufacturers Satellite services providers Regulatory and Standardisation bodies UAS-related working groups and associations
Provisional results confirm: UAS missions requiring Satellite services for BLOS operations are of high interest
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
Satellite services required for Navigation and Communications (safety, payload)
Requirements depend on mission. E.g. 2-5 Mbps downlink, 20-64 kbps C2, < 0.5s latency, …
Sense & Avoid is the most mentioned challenge for integration into non-segregated airspace. Other challenges: Regulations, Frequency spectrum, Reliability of subsystems, Comms latency , Adaptation to ATM , …
NOTE: Still receiving answers. So far 25% but most stakeholders represented

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
13
DRIVEN REQUIREMENTS FOR INTEGRATION OF SATELLITE SERVICES AND UAS (I) Mission requirements for MALE/HALE UAV
Main civil and security missions supported by satellite technologies:
Earth observation and remote sensing Security, surveillance missions and monitoring: law enforcement,
Search and Rescue and Disaster Relieve, Border patrol and Monitoring missions
Telecommunications relay and Broadcasting
Payload types: Electro-optical / Infrared sensors: Real time video, Laser
Imaging Detection and Ranging (LIDAR), digital camera, multi-spectral camera
Radars: Synthetic Aperture Radar (SAR) SIGINT & Warfare systems Chemical, Biological, Radiological and Nuclear (CBRN) sensors Specific payload for telecommunications relay and broadcasting
Operable over Europe and surrounding regions, in all weather conditions, day and night
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
14
DRIVEN REQUIREMENTS FOR INTEGRATION OF SATELLITE SERVICES AND UAS (II) UAS-Satellite communication data links required to ensure mission
and safety of flight:
Mission link C2 link Sense & Avoid link ATC relay link
Safety communication data link is a high reliability data link that requires relatively low data rate and can be accommodated by low frequency bands: L or S
Mission communication data link requires much bandwidth (high capacity) which is available only at higher frequency bands: Ku or Ka
WRC-11 Agenda Item 1.3 addresses spectrum requirements and possible regulatory actions, including allocations, in order to support safe operation of UAS.
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
Mission communication data link
Safety communication data link

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
15
DRIVEN REQUIREMENTS FOR INTEGRATION OF SATELLITE SERVICES AND UAS (III) Satellite communication data links requirements
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
0.995 / 0.999Yes<10-6256 kbpsC2 (real time video)
0.998 / 0.9995Yes< 10-616 kbpsATC (voice)Forward
0.998 / 0.9995Yes<10-864 - 150 kbps C2 (data)
10-6 / 10-8
<10-8
<10-8
< 10-6 / 10-8
< 10-8
BER
0.998 / 0.9995Yes16 kbpsATC (voice)
Return
0.995 / 0.999No
< 30 Mbps for future applications
2 – 8 Mbps for current applications
DataReturn
0.998 / 0.9995Yes25.6 - 256 kbps (real
time video)S&A
0.998 / 0.9995Yes64 - 150 kbps C2
Safety data link
0.995 / 0.999No200 kbpsDataForward
Mission data link
Link Availability
Delay sensitiveThroughputTypeData link
Advanced-UAV with on-board processing capabilities and advanced compression algorithms could reduce the mission data link bit rate requirements

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
16
DRIVEN REQUIREMENTS FOR INTEGRATION OF SATELLITE SERVICES AND UAS (IV)
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
Integration of UAS into the future European ATM system requirements:
Integration of UAS into non-segregated airspace is a key driver for future civil and security UAS development and growth.
Two key issues are required to achieve the required level operability in non-segregated airspace:
To achieve a seamless integration into current and future ATC procedures
To maintain equivalent levels of safety as in manned aviation (Collision avoidance systems – Sense and Avoid)
Satellite telecommunication services contribute to the UAV airspace integration assuring compliance with ATM stringent service requirements (Communications Operating Concept and Requirements for the Future Radio System ) by relying the ATC communications to the UAV remote pilot

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
17
DRIVEN REQUIREMENTS FOR INTEGRATION OF SATELLITE SERVICES AND UAS (V)
As UAV should behave in the ATM system as a manned aircraft, the most feasible options are those labelled as (1) and (2): UAV relays ATC communications (data and voice) from ATC to RPC (and vice versa)
ATC data volume depends on the level of automation of the UAV
Compliance of service requirements should be assessed
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
Integration of UAS into the future European ATM system requirements – Feasible scenarios identification
EATMN Wired or Wirless network
Safety communications satellite system relay
UAV
ATC comms relay:
- Voice
- Data
ATC com
ms relay
-Vo ice-D
ata
Satellite system supporting ATM services
ATC
dat
a lin
kSa
tell it
e C
ompo
nent
:- V
o ice
-Dat
a
ATC data link
Satel lite Component
UAV GES
RPC (GCS)OPAC
(Mission Center)ATC
ATCATC
ATC comms:- Voice- Data
ATC
data
link
Terre
st rial
Com
pone
nt:
- Voi
ce
- Dat
a
12
3
4

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
18
DRIVEN REQUIREMENTS FOR INTEGRATION OF SATELLITE SERVICES AND UAS (VI)
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
√√Denial of Service (flood and inject)
COUNTERMEASURES
THREATS
√√Deliberate RF interference
√√Impersonate
√√√Information alteration
√Information corruption
√√Eavesdropping
Forward Error Correction
Robust networkprotocols
EPM (TRANSEC)
Cryptographic (COMSEC)
Authentication
Data link security requirementsMain threats
Eavesdropping Information corruption Information alteration
Impersonate Denial of service (flood and inject) Deliberate RF interference (jamming)

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
19
DRIVEN REQUIREMENTS FOR INTEGRATION OF SATELLITE SERVICES AND UAS (VII)
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
Space segment capacity requirements Space segment shall provide Safety and Mission BLOS
communications: Satellite communication can be used as a primary (BLOS) or
secondary (redundant) communication means for safety related data links
Primary communication means for mission data link in BLOS conditions
Prediction of MALE/HALE UAV operating in Europe by 2020 is around 200,
Satellite capacity for safety data links: 200 MALE/HALE UAV. Other UAV types could also be equipped with satellite communications for safety purposes
Satellite capacity for mission data link: 20 MALE/HALE UAV simultaneous (coarse estimation: 10% of MALE/HALE UAV)

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
20
DRIVEN SYSTEM ARCHITECTURES (I)
Overall scenario and system breakdown
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
EATMN Wired or Wirless network
Mission communications satellite system relay
UAVs
Mission
Data lin
k
Mission
Data link
ATC
dat a
link
Satellite system supporting ATM services
ATC
dat
a lin
k
ATC data link
Satellite Positioning System (GNSS)
Precise SatNav
service
UAV GES
RPC 1 (GCS)OPAC 1
(Mission Center)ATCATC
ATC
ATC data link
UAV GES
Space Segment
User Segment
Ground Segment
Safety communications satellite system relay
C2, S&A and
ATC relay
data link
C2, S
&A an
d
ATC re
lay
data
link
RPC n (GCS)
OPAC n (Mission Center)
Mission
Data link C2
, S&A
and
AT
C re
lay
data
link
Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
21
DRIVEN SYSTEM ARCHITECTURES (II)
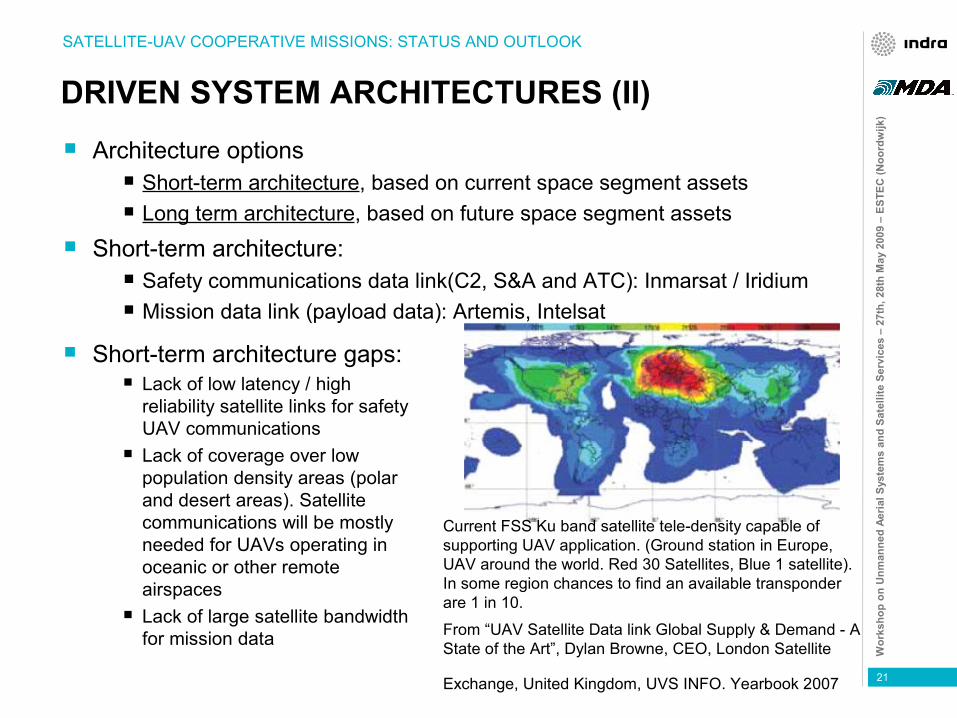
Architecture options Short-term architecture, based on current space segment assets Long term architecture, based on future space segment assets
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
Short-term architecture: Safety communications data link(C2, S&A and ATC): Inmarsat / Iridium Mission data link (payload data): Artemis, Intelsat
Short-term architecture gaps: Lack of low latency / high
reliability satellite links for safety UAV communications
Lack of coverage over low population density areas (polar and desert areas). Satellite communications will be mostly needed for UAVs operating in oceanic or other remote airspaces
Lack of large satellite bandwidth for mission data
Current FSS Ku band satellite tele-density capable of supporting UAV application. (Ground station in Europe, UAV around the world. Red 30 Satellites, Blue 1 satellite). In some region chances to find an available transponder are 1 in 10.
From “UAV Satellite Data link Global Supply & Demand - A State of the Art”, Dylan Browne, CEO, London Satellite
Exchange, United Kingdom, UVS INFO. Yearbook 2007
Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
22
DRIVEN SYSTEM ARCHITECTURES (III)
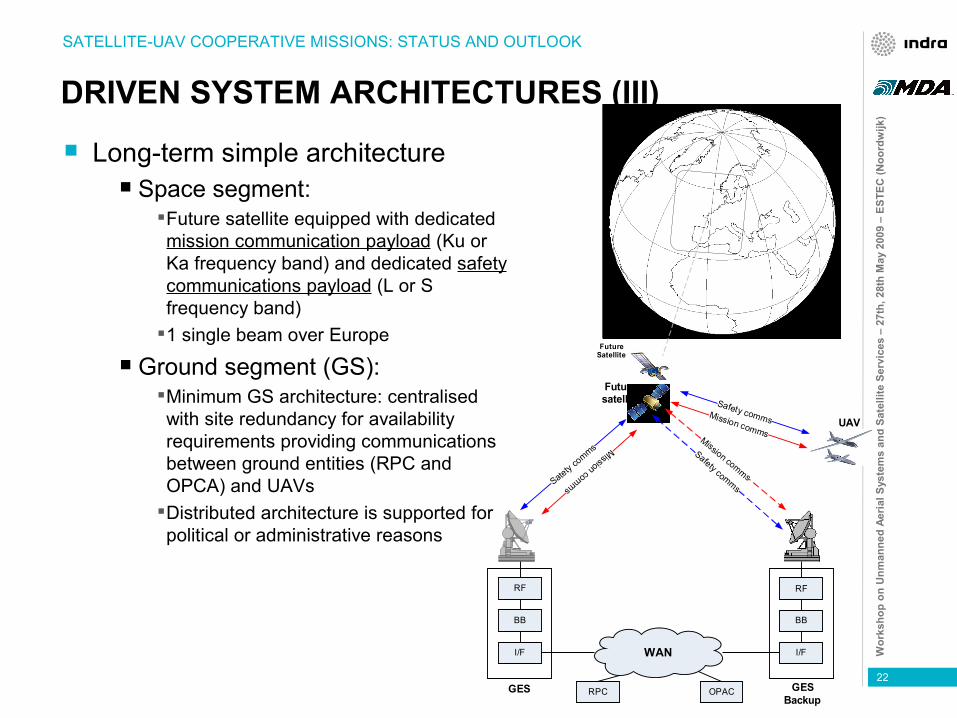
Long-term simple architecture Space segment:
Future satellite equipped with dedicated mission communication payload (Ku or Ka frequency band) and dedicated safety communications payload (L or S frequency band)1 single beam over Europe
Ground segment (GS):Minimum GS architecture: centralised with site redundancy for availability requirements providing communications between ground entities (RPC and OPCA) and UAVsDistributed architecture is supported for political or administrative reasons
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
WAN
RF
BB
I/F
Satety co
mms Mission comms
Safety comms
Mission comms
RF
BB
I/F
Mission comms
Safety comms
GES GESBackup
UAV
Future satellite
RPC OPAC
Future Satellite

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
23
DRIVEN SYSTEM ARCHITECTURES (IV)
Long-term flexible architecture Space segment:
2 future satellites in full redundancy with both mission and safety communications payload. Optionally, satellite number 2 could only carry safety communications payloadCorridor and steerable beams are used to accommodate UAV traffic density. Their orientation can be adjusted as needed.UAV traffic is shared between both satellites1 satellite can cope with all the traffic needs
Ground segment (GS):Minimum GS architecture: 2 active GES + 2 back-up GES (site redundancy)Support distributed architectureRobust to elements failure
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
WAN
RF
BB
I/F
Safety comms
Mission com
ms
RF
BB
I/F
GES 2active
GES 3Backup
UAV
Future satellite 1
Future satellite 2
RF
BB
I/F
RF
BB
I/F
GES 4Backup
GES 1active
UAVMission commsSatety comms
Mission co
mms
Satety comms
Mission co
mms
Satety co
mms
Mission comms
Satety comms
Safety comms
Mission comms
Future Satellite 1 Future
Satellite 2

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
24
DRIVEN SYSTEM ARCHITECTURES (V)
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
Long-term full coverage architecture Space segment:
2 future satellites in full redundancy (flexible architecture) + HEO constellation to fill the coverage gap in the northern regions such as the planned Canadian PCW constellation in Molnyia orbit
Ground segment (GS):Minimum GS architecture: 4 GES for GEO satellites (flexible architecture configuration) + several GES for HEO satellitesCoordination for satellites handovers (GEO to HEO)Distributed architecture is supportedRobust to element failure
Future Satellite 1
HEO constellation
Future Satellite 2

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
25
TRADE-OFF CRITERIA Space segment:
Coverage region System capacity and
throughput Power
User segment: Performance Power and weight
Link performance: Link quality Link availability
Security mechanisms Safety procedures
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK
System: Scalability Modularity Flexibility Growth potential Complexity
Operational performance criteria:
Reliability Redundancy
Costs: Infrastructure (space, ground
and user segment) Operation

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
26
CONCLUSIONS
The synergy between satellite technologies and UAV technologies can substantially improve the UAS performances
Reliable satellite data links can become a primary means of communications for UAS operations and cooperative missions, but also provide a back-up links for safety-of-flight communications
Current available European and Canadian space segment assets have certain gaps to meet the future Long Endurance UAV requirements
Development of future satellites with specific payloads devoted to support UAS communications are required to meet their requirements
To meet UAS-satellite cooperative mission requirements identified as output of this project, safety requirements must be early demonstrated and validated for standardization purposes.
UAS safe communication functions and operations based on satellite technologies, such as S&A, ATC communications, and UAS specific safe operations (take-off, landing, health monitoring,..) should be early simulated and demonstrated by developing emulators, first, and fly trial later.
SATELLITE-UAV COOPERATIVE MISSIONS: STATUS AND OUTLOOK

Wor
ksho
p on
Unm
anne
d Ae
rial S
yste
ms
and
Sate
llite
Ser
vice
s –
27th
, 28t
h M
ay 2
009
– ES
TEC
(Noo
rdw
ijk)
27
Jordi Batlle Masferrer
[email protected]: +34 93 463 05 69
Indra Espacio, S.A.Telecommunication and Navigation Solutions
Roc Boronat, 133 08018 Barcelona, SPAINwww.indra.es/espacio
Daniel Cobo Vuilleumier
[email protected]: +34 91 627 1662
Indra Sistemas, S.A.UAS/ISTAR Programmes
Ctra. de Loeches 928850 Torrejón de Ardoz, Madrid
SPAIN www.indracompany.com
Jaafar Cherkaoui
[email protected]: +1 514 457 2150 ext. 3552
MDASpace Missions
21025 Trans Canada HighwaySte-Anne-de-Bellevue, QuebecCanada H9X 3R2www.mdacorporation.com


















