
Sambuceti_Cariz_Dangello
138
UNIVERSIDAD DE SANTIAGO DE CHILE FACULTAD DE INGENIERIA DEPARTAMENTO DE INGENIERIA GEOGRAFICA “SISTEMA DE TRANSPORTE DE COORDENADAS, REPLANTEO Y CONTROL GEOMETRICO EN LA CONSTRUCCION DE UN TUNEL” D`ANGELLO FRANCHINO SAMBUCETI CARIZ 2008
-
Upload
topillodos -
Category
Documents
-
view
4.291 -
download
10
Transcript of Sambuceti_Cariz_Dangello

UNIVERSIDAD DE SANTIAGO DE CHILE
FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERIA GEOGRAFICA
“SISTEMA DE TRANSPORTE DE COORDENADAS,
REPLANTEO Y CONTROL GEOMETRICO EN LA
CONSTRUCCION DE UN TUNEL”
D`ANGELLO FRANCHINO SAMBUCETI CARIZ
2008
UNIVERSIDAD DE SANTIAGO DE CHILE
FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERIA GEOGRAFICA
“SISTEMA DE TRANSPORTE DE COORDENADAS,
REPLANTEO Y CONTROL GEOMETRICO EN LA
CONSTRUCCION DE UN TUNEL”
“TRABAJO DE TITULACION PRESENTADO EN CONFORMIDAD A
LOS REQUISITOS PARA OBTENER EL TITULO DE INGENIERO DE
EJECUCION EN GEOMENSURA”
Profesor Guía: WALTERIO GONZALEZ BARRA
D`ANGELLO FRANCHINO SAMBUCETI CARIZ
2008

AGRADECIMIENTOS
Agradezco con todo mi corazón a mis padres quienes hicieron
posible todo esto, gracias por su apoyo incondicional, su confianza
y su amor y a quienes les debo todo en la vida.
Gracias a mi hijo Vincenzo y mi novia Daniela, quienes fueron
el motor que me impulsó a seguir adelante día a día y terminar el
camino que un día empecé y a quienes me debo por completo.
Un agradecimiento especial a mis jefes y amigos Luis
González y Fabián Burgos, quienes me apoyaron en todo y me
incitaron a seguir adelante.
Dangello Sambuceti C.

RESUMEN
La georreferenciación y el correcto transporte de coordenadas en
un proyecto a mediana y gran escala, de cualquier índole, constituye
un recurso de suma utilidad para asociar el estudio a un sistema de
coordenadas conocido.
El estudio de este trabajo, consta de las principales etapas para
llevar a cabo un proyecto de gran envergadura, como lo es la
extensión del Metro de Santiago. En él se incluyen las etapas de toma
de fotografías aéreas y la georreferenciación de puntos de apoyo para
la confección de la cartografía del proyecto, el sistema de transporte
de coordenadas y finalmente el replanteo y control geométrico del
túnel. Teniendo presente que la base para la realización de este
proyecto es la topografía y la geodesia, el Ingeniero de Ejecución en
Geomensura juega un rol imprescindible en el desarrollo del proyecto.
PALABRAS CLAVES
PTL
Túneles
Roadline
Georreferenciaciòn

ABSTRACT
The georeferencing and the correct coordinate transportation in a
medium and big scale project of any kind it constitutes a resource
extremely useful to associate the study to a known coordinate system.
The study from this work has the main stages for build a big
project like the Metro line extension from Santiago. This work includes
the stages of takes aereal photographs and the support points
georeferencing to make the project cartography, the coordinate
transportation system and finally the mak out and geometric control
tunnel. Knowing that the base for build this project is topography and
geodesy, the Surveying Engineer plays a fundamental role in the
development of the project.
KEY WORDS
PTL
Tunnels
Roadline
Georeferencing

INDICE
CAPÍTULO I: INTRODUCCION .…………………..……………………1
1.1 ANTECEDENTES GENERALES ……………………………………...….1
1.1.2 SITUACION ACTUAL ………………………………...………………….2
1.2 HIPOTESIS …………………………………….………….…………………….3
1.3 OBJETIVOS ……………………………………………………………………….4
1.3.1 OBJETIVO GENERAL .………………….…………………………………4
1.3.2 OBJETIVOS ESPECÍFICOS .…………………..……………………….4
CAPÍTULO II: CONCEPTOS Y METODOLOGIA DE
TRABAJO…………………………………………………………………………..5
2.1 FUNDAMENTOS TEORICOS ………………………………………………5
2.1.1 CONCEPTOS BASICOS ………………………………………….………5
2.1.1.1 PLANIMETRÍA ………………………………………………………………5
2.1.1.2 LEVANTAMIENTOS TOPOGRÁFICOS …………………………..5
2.1.1.3 LEVANTAMIENTOS TOPOGRÁFICOS CON
ESTACIÓN TOTAL ………………………….……………………………………………….6
2.1.1.4 CURVAS CIRCULARES ……………………………………….........7
2.1.1.5 CURVAS DE TRANSICIÓN ……………………………………………9
2.1.1.6 CURVAS VERTICALES DE ENLACE ……………………………12
2.1.1.7 GEODESIA …………………………………………………………………14
2.1.1.8 EL GEOIDE …………………………………………………………………15
2.1.1.9 EL ELIPSOIDE ……………………………………………………………17
2.1.1.10 DATUM GEODÉSICO HORIZONTAL ………………………….19
2.1.1.11 COORDENADAS GEODÉSICAS (φ , λ, h) …………………19
2.1.1.12 COORDENADAS CARTESIANAS
ORTOGONALES RECTILÍNEAS (X, Y, Z) .…………………………..…………21
2.1.1.13 SISTEMAS GLOBALES DE REFERENCIA …………………..22

2.1.1.14 SISTEMAS DE REFERENCIA ………………………………………23
2.1.1.15 SISTEMA ITRF ……………………………………………………………24
2.1.1.16 SISTEMA WGS-84 ………………………………………………….…26
2.1.1.17 SISTEMA SIRGAS ………………………………………………………28
2.1.1.18 TRANSFORMACION DE COORDENADAS ………………….29
2.1.1.19 CARTOGRAFÍA …………………………………………………………..30
2.1.1.20 PROYECCIONES CARTOGRÁFICAS ….……………………….31
2.1.1.21 CLASIFICACIÓN DE LAS PROYECCIONES
CARTOGRÁFICAS ……………………………………………….…………………………31
2.1.1.21.1 SEGÚN MÉTODO DE CONSTRUCCIÓN ………………..32
2.1.1.21.2 SEGÚN SUPERFICIE DE PROYECCIÓN
UTILIZADA ………………………………………………………………………………….33
2.1.1.21.3 SEGÚN SITUACIÓN DE LA SUPERFICIE
DE PROYECCIÓN …………………………………………………………………………33
2.1.1.21.4 SEGÚN LAS PROPIEDADES QUE
CONSERVAN……………………………………………………………………………..…34
2.1.1.22 PROYECCIÓN UNIVERSAL TRANSVERSAL
DE MERCATOR (UTM) …………………….…………………………………..........37
2.1.1.23 PROYECCIÓN LOCAL TRANSVERSAL DE
MERCATOR (LTM) ……………………………………………….……………………..…38
2.1.1.24 PLANOS TOPOGRÁFICOS LOCALES (PTL) ……………….39
2.1.1.25 REDUCCIÓN DE DISTANCIA PTL A DISTANCIAS
HORIZONTALES DE TERRENO ……………………………………………………..41
CAPÍTULO III: DESARROLLO …………………………………………..44
3.1 INTRODUCCIÓN …………………………………………………………….44
3.2 ANTECEDENTES GENERALES …………………………...........…45
3.3 ETAPAS DEL PROYECTO ……………………………………...........48
3.4 GEORREFERENCIACIÓN DEL PROYECTO …………………….52
3.4.1 DETERMINACIÓN DE BASES GPS …………….…………….….53

3.4.2 PROCESAMIENTO DE LOS DATOS …………….…………….…56
3.4.3 CÁLCULO DE COORDENADAS UTM DE LOS
PUNTOS GPS ……….…………………………………………….…………………………..57
3.4.4 AJUSTE DE COORDENADAS …………………………………......57
3.5 SISTEMA DE PROYECCIÓN ……..………………………………..….58
3.5.1 USO DEL SISTEMA DE PROYECCIÓN LOCAL
TRANSVERSAL DE MERCATOR (LTM) …………………………………..……….60
3.5.2 DETERMINACIÓN DE PLANOS
TOPOGRÁFICOS LOCALES ………………………………………………………………61
3.6 SISTEMA DE TRANSPORTE DE COORDENADAS ……………63
3.6.1 POLIGONAL PRINCIPAL ………………………………………..…….63
3.6.2 PLANIFICACIÓN ……………………………………………………………64
3.6.3 PROCEDIMIENTO POLIGONAL …………………………………….65
3.6.4 CÁLCULO POLIGONAL PTL ………………………………………....71
3.6.5 REDUCCIONES DE DISTANCIA ……………………………………75
3.6.6 NIVELACIÓN GEOMÉTRICA DE LOS PR ………………………78
3.6.7 VALIDACIÓN POLIGONAL ……………………..……………………79
3.7 TÚNELES ANDEN ESTACIÓN ………………………………………….81
3.7.1 ACCESOS INTERMEDIOS, TÚNELES
INTERESTACIÓN …………………………………………………………………………..…84
3.7.2 TÚNELES VENTILACIÓN ………………………………………………85
3.8 INTRODUCCIÓN AL SISTEMA CONSTRUCTIVO
DE LOS TÚNELES …………………………………………………………..………….………89
3.9 SISTEMA DE TRANSPORTE DE COORDENADAS
AL INTERIOR DEL PIQUE ……………………………………………………….……..….93
3.9.1 TRANSPORTE DE COORDENADAS AL INTERIOR
DE PIQUE INTERESTACIÓN Y PIQUE VENTILACIÓN ………………………93
3.9.2 NIVELACIÓN GEOMÉTRICA DE LA CONSOLA …………….95

3.9.3 TRANSPORTE DE COORDENADAS AL INTERIOR
DE PIQUE ESTACIÓN ………………………………………………………………………96
3.9.4 NIVELACIÓN GEOMÉTRICA DE LA CONSOLA …………….97
3.9.5 POLIGONAL INTERIOR …………………………………………………97
3.9.6 CENTRADO FORZADO ……………………………………………….100
3.10 CONTROL GEOMÉTRICO DEL TÚNEL …………………………..105
3.10.1 CONFECCIÓN DE UN ROADLINE ……………………………….107
3.10.2 METODOLOGÍA DE USO …………………………………………...108
3.10.3 EJE PLANIMÉTRICO ……………………………………………………109
3.10.4 EJE ALTIMÉTRICO ………………………………………………………113
3.10.5 GENERACIÓN DE RUTINAS PARA EL
CONTROL GEOMÉTRICO DEL TÚNEL ………………………………..……..….117
3.10.6 PROCEDIMIENTO DEL CONTROL GEOMÉTRICO
DE EXCAVACIONES Y MARCOS ………………………………………….…………120
CAPÍTULO IV: ANALISIS DE RESULTADOS …………………..…124
4.1 ANALISIS DE PRECISION DISTANCIAS PTL ……………….124
4.2 TOLERANCIA CIERRE ANGULAR ………………………………….125
4.3 PROCEDIMIENTOS EMPLEADOS ………………………………….126
CAPÍTULO IV: CONCLUSIONES ……………………………………..127
BIBLIOGRAFIA ……………………..............................................129

1
CAPÍTULO I: INTRODUCCION
1.1 ANTECEDENTES GENERALES
El trabajo abordado en esta memoria tiene relación con la solución
al problema que se presenta en el transporte de coordenadas en el
proyecto de la extensión de la Línea 5 del Metro, el cual se produce al
georreferenciar éste, mediante bases de puntos con coordenadas UTM
y luego considerarlas y trabajarlas como coordenadas topográficas
locales y la solución que se da al problema de transporte de
coordenadas bajo el túnel para hacer coincidir la excavación de los
túneles, los cuales deben encontrarse en un punto y dentro de la
tolerancia indicada. Esta memoria también considera el sistema usado
en el replanteo y el control geométrico en la construcción de los
túneles.
Esta obra perteneciente a la Empresa de Transporte de Pasajeros
METRO S.A., la cual corresponde a la extensión de la Línea 5, la cual
une las comunas de Quinta Normal y Maipú, cuenta con once nuevas
estaciones, las cuales van desde la unión con la Estación Quinta
Normal, hasta llegar a la Estación Plaza de Maipú, pasando por las
estaciones Gruta de Lourdes, Blanqueado, Lo Prado, San Pablo (futura
conexión con Línea 1), Pudahuel, Barrancas, Laguna Sur, Las Parcelas,
Monte Tabor, Santiago Bueras y por último Plaza de Maipú. Este nuevo
tramo de Metro tiene por finalidad aliviar la congestión de pasajeros en
los horarios pick que se produce en otras líneas del Metro y en el

2
sistema de transporte urbano en la superficie, además de densificar
sus redes para acercar más personas al Metro.
En el presente tema se analizan aspectos geodésicos como
Georreferenciación de un proyecto y la materialización de Sistema de
Transporte de Coordenadas, Proyecciones UTM (Universal Transversal
de Mercator), factores de escala, PTL (Plano Topográfico Local) y los
aspectos topográficos como sistema de transporte de coordenadas,
programación básica en estaciones totales y calculadoras científicas
para replanteo de puntos, además de control geométrico de los túneles
y sistemas constructivos.
Teniendo en cuenta que la tecnología de los actuales equipos
usados hoy en día para topografía y geodesia, la cual avanza en forma
apresurada, se hace imprescindible que los conocimientos técnicos
para el uso de estos, vayan avanzando en conjunto con la tecnología,
es por esto que en esta memoria se hace hincapié en técnicas para
maximizar el uso de estos equipos.
1.1.2 SITUACION ACTUAL
Antiguamente, en proyectos de ingeniería a gran escala, debido a
la desinformación que se puede haber tenido en ese tiempo, se daban
estos casos de discrepancias entre las distancias indicadas en los
planos de proyecto y lo que ello representa en el terreno, optando por
soluciones no muy óptimas. Hoy en día gracias a los estudios en esta
materia, se ha normado mediante el Manual de Carreteras del
Ministerio de Obras Públicas de Chile, publicado en el año 2001, el cual

3
introduce el concepto de sistema de proyección Local Transversal de
Mercator (LTM), para la georreferenciación de trabajos de topografía
en proyectos de ingeniería, dando solución así a estas discrepancias,
para poder así, replantear de forma expedita proyectos de distinta
índole.
1.2 HIPOTESIS
Para resolver el problema de discrepancia entre distancias,
ciñéndose a lo estipulado en el Manual de Carreteras del Ministerio de
Obras Públicas de Chile, el cual restringe el uso de la proyección UTM
(Universal Transversal de Mercator), para proyectos de ingeniería,
introduciendo la proyección LTM (Local Transversal de Mercator), y
aplicando un plano coincidente con la altura media del sector,
aplicándose así un sistema de coordenadas PTL (Plano Topográfico
Local), solucionando así las deformaciones que se producen por altura
y por la proyección cartográfica.
También se debe resolver el problema del sistema de transporte
de coordenadas dentro del túnel, para lograr que las mediciones se
encuentren dentro de la tolerancia indicada para el proyecto. Para el
sistema de transportes de coordenadas por el túnel se aplica el
Sistema de Centrado Forzado, el cual es la hipótesis que se da para
solucionar este problema y poder llevar a cabo la ejecución del
proyecto de construcción que se tratará en este trabajo.

4
1.3 OBJETIVOS
1.3.1 OBJETIVO GENERAL
El objetivo general de esta memoria es dar aplicación bajo normas
y requerimientos modernos, en un sistema de transporte de
coordenadas, replanteo y el control geométrico, etapas que se
desarrollan para un proyecto de túneles, como lo es la construcción de
los túneles para el Metro de Santiago.
1.3.2 OBJETIVOS ESPECÍFICOS
Los objetivos específicos de esta memoria son mostrar y explicar
los distintos elementos que influyen en el sistema de coordenadas y
control geométrico de una obra de túneles, además de aplicar un
sistema de transporte de coordenadas específico utilizado en este tipo
de obras, desde la aplicación de un Sistema de Coordenadas
Topográficas Locales (PTL), hasta llegar a la materialización del túnel,
mediante el replanteo y el control geométrico de éste, conociendo a su
vez sobre los sistemas para transportar coordenadas por el túnel y
sistemas constructivos propios de estas obras
5
CAPÍTULO II: CONCEPTOS Y METODOLOGIA DE TRABAJO
2.1 FUNDAMENTOS TEORICOS
2.1.1 CONCEPTOS BASICOS
2.1.1.1 PLANIMETRÍA
En su concepto más básico se refiere a la parte de la topografía
que se ocupa de la representación, en proyección horizontal, de la
superficie terrestre, sobre un plano.
2.1.1.2 LEVANTAMIENTOS TOPOGRÁFICOS
Los levantamientos topográficos se realizan con el fin de
determinar la configuración del terreno y la posición sobre la superficie
terrestre, de elementos naturales o instalaciones construidas por el
hombre. En un levantamiento topográfico se toman los datos
necesarios para la representación gráfica o elaboración del mapa del
área en estudio.

6
Por definición la taquimetría, es el procedimiento topográfico que
determina en forma simultánea las coordenadas Norte, Este y Cota de
puntos sobre la superficie del terreno. Hasta la década de los 90, los
procedimientos topográficos se realizaban con teodolitos y miras
verticales. Con el desarrollo técnico de las Estaciones Totales
electrónicas, de tamaño reducido, costos accesibles, funciones
programadas y programas de aplicación incluidos, la aplicación de la
taquimetría tradicional con teodolito y mira ha venido siendo
desplazada por el uso de Estaciones Totales.
2.1.1.3 LEVANTAMIENTOS TOPOGRÁFICOS CON ESTACIÓN
TOTAL
Una de las grandes ventajas de levantamientos con Estación Total
es que la toma y registro de datos es automático, eliminando los
errores de lectura, anotación, trascripción y cálculo, ya que con estas
Estaciones, la toma de datos es automática (en forma digital) y los
cálculos de coordenadas se realizan por medio de programas de
computación incorporados a dichas estaciones. Generalmente estos
datos son archivados en formato ASCII para poder ser leídos por
diferentes programas de topografía, diseño geométrico y diseño y
edición gráfica.
Un punto en el espacio queda perfectamente definido por sus
coordenadas P(Norte, Este, Cota). Con estas coordenadas se puede
representar en la forma más exacta posible el relieve de la superficie
del terreno. Para lograr esto, es necesario definir por sus coordenadas
un número de puntos que logre satisfacer la representación a escala
7
del lugar en cuestión, con el fin de obtener un Modelo Digital de
Terreno (MDT), correspondiente al área que se está levantando la
información.
2.1.1.4 CURVAS CIRCULARES
Cuando dos tangentes son enlazadas por una sola curva esta se
llama curva simple. Una curva puede doblar hacia la derecha o hacia la
izquierda, recibiendo entonces ese calificativo adicional.
Cuando dos o más curvas circulares contiguas, de diferente radio,
cruzan hacia el mismo lado, reciben el nombre de curvas compuestas,
en tanto que cruzan en sentido opuesto y tienen un punto de
tangencia en común, siendo sus radios iguales o diferentes, reciben el
nombre de curvas revertidas. La curva horizontal está constituida por
elementos que están normados y definidos en forma matemática.

8
Figura 2.1: Elementos de la Curva Circular. Fuente MCV3
Donde:
� Vn : corresponde al punto de intersección de las dos
tangentes de la curva.
� αααα : es el ángulo que se forma entre las dos tangentes, el
cual se mide desde la alineación de entrada.
� ωωωω : corresponde al ángulo formado por la prolongación de
la tangente y la siguiente, que se repite como ángulo del
centro subtendido por el arco circular.
� R : radio de curvatura del círculo (m).
� T : tangentes (m), son las distancias iguales entre el PC
y V, como entre el FC y el V.

9
� S : bisectriz, es la distancia que existe entre el vértice y
el punto medio del arco del círculo (MC).
� D : desarrollo, corresponde a la longitud del arco circular
desde el PC al FC.
� P : peralte (%), está relacionado al diseño de la curva y
corresponde a la inclinación transversal de la calzada.
Si ωωωω > 200g la curva es a la derecha, si ωωωω < 200g la curva es a la
izquierda.
Las fórmulas para calcular los elementos de la curva circular son
las siguientes:
�
�
�
�
2.1.1.5 CURVAS DE TRANSICIÓN
En un trazado donde solo se emplean rectas y arcos de círculo, la
curvatura pasa bruscamente desde cero en la tangente hasta un valor
finito y constante en la curva. Esta discontinuidad de curvatura en el
punto de unión de los alineamientos rectos con las curvas circulares no
puede aceptarse en un trazado racional, pues además de ser incómoda
para el conductor puede ser causa de accidentes debido a la fuerza

10
centrífuga. Entonces, es conveniente introducir un elemento
intermedio, de radio variable, en la unión de los tramos rectos y las
curvas circulares, de modo que se produzca una trayectoria adecuada
a los cambios del equilibrio dinámico del vehículo, cuando este pasa de
un recorrido rectilíneo a uno circular, o viceversa.
Entre las funciones que debe cumplir este elemento de enlace, se
destacan los siguientes:
� Proporcionar un crecimiento gradual de la aceleración
centrífuga, que evite las molestias que significaría para los
pasajeros su aparición brusca.
� Permitir al conductor entrar o salir de la curva circular,
ejerciendo una acción gradual sobre el volante del vehículo.
� Posibilitar un desarrollo gradual del peralte, aumentando la
inclinación transversal de la calzada a medida que disminuye
el radio, hasta llegar exactamente al valor necesario del
peralte en el punto de comienzo de la curva circular.
� Generar un trazado estéticamente satisfactorio y que oriente
visualmente al conductor.
La curva de transición que mejor se adapta a tales funciones es la
clotoide; esta curva pertenece a la familia de las espirales y su
curvatura es nula en el punto inicial y crece linealmente con su
desarrollo. La ecuación paramétrica de la clotoide es:

11
� R : Radio de la curva en un punto determinado de la
misma.
� L : Desarrollo de la curva desde el origen hasta el punto
de radio R.
� A : Parámetro de la clotoide.
El parámetro A define la magnitud de la Clotoide, lo que a su vez
define la relación entre R, L y τ. Siendo τ el ángulo comprendido entre
la tangente a la curva en el punto (R, L) y la alineación recta normal a
R = V que pasa por el origen de la curva.
Las expresiones que ligan R, L y τ son:
� (Radianes)
� (gonios)

12
Figura 2.2: Elementos de la Clotoide. Fuente MCV2
2.1.1.6 CURVAS VERTICALES DE ENLACE
En el momento en que se unen dos rasantes con distinta
pendiente, existe un ángulo que se forma en la proyección de una
pendiente con respecto a la otra, este ángulo se denomina ángulo de
deflexión de rasante, el que queda definido en la siguiente expresión
algebraica.
θ = |i1 – i2|

13
Figura 2.3: Elementos de la Curva Vertical. Fuente MCV3
Cuando el ángulo de deflexión θ sea mayor a 0,5 % se proyectará
una curva vertical para poder unir las rasantes, siendo esta curva de
enlace una parábola de segundo grado, la que podrá ser de dos tipos
“Cóncava o Convexa”.
La característica principal que posee esta curva de enlace es que
los elementos verticales medidos desde la tangente a la parábola son
proporcionales a los cuadrados de las proyecciones horizontales,
medidas desde el punto de tangencia hasta el elemento vertical. Se
puede obtener el desarrollo de la curva vertical, con la siguiente
fórmula:

14
Otras fórmulas empleadas para esta curva son las siguientes:
Donde:
f : Longitud de la Bisectriz
T : Longitud de la tangente
K : Distancia horizontal en metros, requerida para que se
produzca un cambio de pendiente en la parábola de un uno
por ciento a lo largo de la curva.
Y : Ordenada de un punto cualquiera en la curva.
2.1.1.7 GEODESIA
La palabra Geodesia viene del griego Geodaisia, Geo= tierra y
daisia= dividido, lo que significa “División de tierras”, los griegos
fueron unos de los primeros en estudiarla basándose en
especulaciones y teorías.

15
Los textos definen la Geodesia de la siguiente manera:
� P.S. Zakatov “Curso de Geodesia Avanzada”
“La Geodesia es la ciencia que trata los métodos de medición
exacta de los elementos de la superficie de la Tierra y su empleo para
la determinación de la posición geográfica de puntos en la superficie.
Estudia además, la figura de la Tierra, basándose en investigaciones
teóricas y en el tratamiento de los resultados de las mediciones”.
� R. K. Burkard “Geodesia para todos”
“La Geodesia se puede definir como la ciencia que se ocupa del
posicionamiento preciso de puntos en la superficie terrestre y de la
determinación del tamaño y de la figura exacta de la Tierra. Esto
involucra el estudio de las variaciones de la gravedad terrestre y la
aplicación de tales variaciones en las mediciones precisas sobre ella”.
Por otro lado, la Geodesia tiene como objetivo científico la
determinación de las dimensiones y forma de la Tierra, el potencial de
gravedad; considerando las posibles variaciones en el tiempo.
2.1.1.8 EL GEOIDE
Según textos, el Geoide es una superficie de nivel que coincide
con la superficie de los océanos cuando todas las masas de agua están
en perfecto equilibrio. Es una superficie donde el potencial de
gravedad es igual en cualquier punto sobre ella (equipotencial). Se
define por las direcciones de la fuerza de gravedad, que coinciden con
las direcciones de las verticales en cada uno de los puntos de él. Esto
16
es importante, debido que los instrumentos ópticos y otros que poseen
dispositivos de nivelación, se usan comúnmente en las mediciones
geodésicas.
En el momento que están correctamente nivelados, el eje vertical
del instrumento coincide con la dirección de la fuerza de gravedad y
es, por lo tanto, perpendicular en toda su trayectoria. Por otra parte
este se aproxima con aquella superficie que conformarían todos los
océanos sobre la Tierra, considerando que ella estuviera libre de
ajustes debido al efecto combinado de la fuerza de atracción de la
masa terrestre y la fuerza centrífuga de rotación de la Tierra.
Su superficie es continua, cerrada y sin salientes bruscos ni
pliegues, debido a esta característica es que no puede ser
representada analíticamente, por lo cual tampoco es apta como la
superficie geométrica donde se realizan los diversos y complejos
cálculos geodésicos (Figura 2.4). Consecuentemente es necesario
escoger otra figura, matemática definida en cuya superficie puedan
resolverse los problemas geodésicos sin mucha dificultad. Esta
superficie debe ser próxima al geoide.
17
Figura 2.4: El Geoide
2.1.1.9 EL ELIPSOIDE
Según investigaciones teóricas, así como el procesamiento de
datos astrogeodésicos han demostrado que la figura matemática más
simple, que se acerca al geoide, es el elipsoide de revolución. El
elipsoide de revolución se obtiene girando una elipse, en torno a su eje
más corto (Figura 2.5).

18
Figura 2.5: Elementos de una elipse
Donde:
a = Semieje mayor
b = Semieje menor
f = Achatamiento =
PP’ = Eje de revolución de la elipse.
Los elipsoides asociados a sistemas geodésicos clásicos son
adaptados geométricamente a un continente, país o región y bastará
orientarlo de manera que se ajuste al lugar donde será usado.

19
2.1.1.10 DATUM GEODÉSICO HORIZONTAL
Datum horizontal, se define como un modelo matemático que
trata de aproximarse lo más posible a la forma de la Tierra, a través
de un elipsoide de revolución, ajustado a una zona determinada del
geoide, permitiendo calcular la posición de cualquier elemento sobre la
superficie, en forma consistente y precisa, donde las componentes
más relevantes son (ϕ, λ) o sus proyectadas (N, E).
2.1.1.11 COORDENADAS GEODÉSICAS (φ , λ, h)
Las coordenadas geodésicas están constituidas por dos
componentes: Latitud (φ), Longitud (λ) y la Altura Elipsoidal (h). Estas
componentes están vinculadas directamente al elipsoide de referencia.

20
Figura 2.6: Coordenadas Geodésicas, fuente “Sistema
Geodésico Nacional”, Instituto Nacional de Estadística, Geografía e
Informática de México.
La Latitud es el ángulo que se forma entre la normal en el punto P
y el plano ecuatorial. Su valor varía de 0º a 90º con signo positivo en
el hemisferio norte del elipsoide y negativo en el hemisferio sur.
La Longitud es el ángulo diedro entre el meridiano origen
(Greenwich) y el plano meridiano en el punto P. Su valor varía de 0º a
180º siendo positiva a partir del meridiano origen hacia el Este y
negativa hacia el Oeste.
21
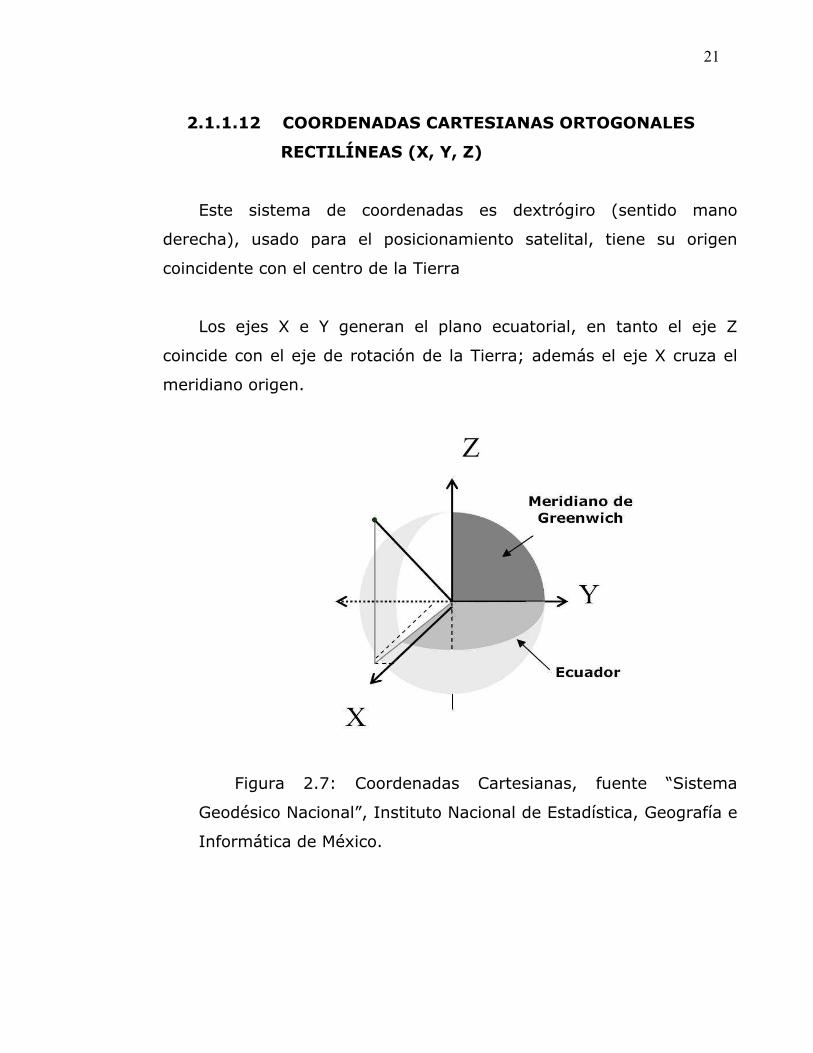
2.1.1.12 COORDENADAS CARTESIANAS ORTOGONALES
RECTILÍNEAS (X, Y, Z)
Este sistema de coordenadas es dextrógiro (sentido mano
derecha), usado para el posicionamiento satelital, tiene su origen
coincidente con el centro de la Tierra
Los ejes X e Y generan el plano ecuatorial, en tanto el eje Z
coincide con el eje de rotación de la Tierra; además el eje X cruza el
meridiano origen.
Figura 2.7: Coordenadas Cartesianas, fuente “Sistema
Geodésico Nacional”, Instituto Nacional de Estadística, Geografía e
Informática de México.

22
Los tipos de coordenadas vistos, se pueden relacionar, esto
quiere decir que las coordenadas geodésicas se pueden transformar a
coordenadas cartesianas y viceversa. Esto es posible ya que ambos
sistemas están relacionados geométricamente al mismo origen, con lo
cual pueden ser convertidas o transformadas de uno al otro
analíticamente.
2.1.1.13 SISTEMAS GLOBALES DE REFERENCIA
Por Sistema de Referencia se entiende en estricto rigor, como el
conjunto de prescripciones, convenciones y el modelo requerido para
definir un sistema tridimensional en cualquier instante. De forma más
simple se dice que un sistema de referencia es una definición teórica
de la posición que ocupan unos ejes en el espacio, respecto a los
cuales se refieren la posición de otros objetos.
Un sistema de referencia se denomina Inercial, si se encuentra en
reposo o se mueve con velocidad constante respecto al resto del
universo. En la naturaleza no existen sistemas de referencia de este
tipo, aunque en la práctica se puede considerar como sistema cuasi-
inercial uno que se encuentre en reposo o con movimiento de
velocidad constante respecto de las estrellas, u otros objetos
suficientemente lejanos.
Los sistemas de referencia terrestres, que son ligados a la Tierra,
y por lo tanto giran y trasladan conjuntamente con ella. Es decir son
sistemas acelerados, en consecuencia no inerciales. Su definición

23
genérica es un sistema en que el plano fundamental es el Ecuador, el
eje Z está en la dirección del Eje de rotación terrestre, el eje X en
dirección con la intersección del Meridiano Origen (Greenwich) con el
Ecuador y, el eje Y formando triedro directo y origen en el centro de
masas de la Tierra.
2.1.1.14 SISTEMAS DE REFERENCIA
En los sistemas de referencia se pueden diferenciar dos
conceptos: Sistemas Definidos y Sistemas Materializados.
Los sistemas de referencia Definidos, se definen a partir de
consideraciones matemáticas y físicas e involucran la especificación de
parámetros, puntos, origen. Por lo tanto, es un concepto ideal.
En tanto los sistemas de referencia materializados están
constituidos por puntos materializados en el terreno y ubicados con
gran exactitud y precisión según alguno de los sistemas de referencia.
Para los sistemas de referencias definidos existen dos niveles
fundamentales: Los Sistemas de Referencia Celeste (CRS) y Los
Sistemas de Referencia Terrestres (TRS).
Los sistemas de referencia celestes (CRS), son sistemas cuasi-
inerciales respecto a los cuales referimos las posiciones de los objetos
celestes, por ejemplo cuásares, púlsares, estrellas, etc. La dirección
del eje de rotación Terrestre permanece aproximadamente constante
respecto a tales objetos y permite definir el sistema de referencia. Su
definición genérica es un sistema Ecuatorial absoluto cuyo plano

24
fundamental es el Ecuador, el eje Z en la dirección del eje de rotación
terrestre, el eje X en la dirección del punto Aries, y el eje Y formando
triedro directo y origen en el centro de masas de la Tierra.
Los sistemas de referencia terrestres (TRS), son sistemas ligados
a la Tierra, y por lo tanto giran conjuntamente con ella. Es decir son
sistemas acelerados y por ende no inerciales. Su definición genérica es
un sistema en que el plano fundamental es el Ecuador, el eje Z está en
la dirección del eje de rotación terrestre, el eje X en la dirección con la
intersección del meridiano de Greenwich con el Ecuador y el eje Y
formando triedro y origen el centro de masas de la Tierra.
2.1.1.15 SISTEMA ITRF
El Sistema de Referencia Terrestre Internacional ITRF
(International Terrestrial Reference Frame), es un sistema global
geocéntrico de carácter científico establecido por el Servicio
Internacional de Rotación Terrestre IERS (International Earth Rotation
Service) y está constituido por un conjunto de coordenadas y
velocidades de las estaciones que lo materializan, debido a
movimientos de las placas tectónicas en las que están asentadas.
Su continua evolución permite agregar nuevas estaciones cada
año y mejorar la precisión general del conjunto. Por esta razón, cada
nueva realización lleva indicado el año de su determinación, como
también, la época fundamental a la cual se refieren las coordenadas
listadas (por ej. ITRF93, o ITRF94, época 1993.0). Esto quiere decir
que ITRF93 difiere de ITRF94 porque se ha agregado más información

25
para calcular este último, lo que se traduce en pequeñas variaciones
de posiciones y velocidades. En su conjunto, estas diferencias
permiten encontrar parámetros de transformación entre las distintas
materializaciones del sistema terrestre internacional.
Cabe mencionar que en la actualidad, estas transformaciones
están en niveles de los centímetros y por el momento no tienen
importancia práctica para aplicaciones geodésicas convencionales.
Mucho más importante puede ser el efecto de las velocidades, no
obstante, es importante no perder la dimensión del problema: este
efecto debe ser considerado cuando se trabaja en redes regionales que
involucran distintas placas tectónicas y, de manera especial, cuando se
utilizan distintas estaciones con coordenadas ITRF definidas en una
época original.
En el presente, se utiliza ITRF2005, el cual adopta los siguientes
criterios generales en su determinación:
I. ITRF2005 consiste en una serie de posiciones y velocidades de unas
estaciones que conforman una red global en toda la Tierra.
II. ITRF2005 debe incluir todos los puntos reconocidos de utilidad para
aplicaciones de Geodesia, Cartografía y Navegación.
III. ITRF2005 debe incluir una base de puntos primarios que deben ser
acordes con la calidad anual de las soluciones obtenidas. Estos puntos
deben mejorar las soluciones del ITRF2000 al que sustituye.
IV. Dado que existirán varios niveles de calidad en los puntos
individuales los criterios de calidad deben ser cuidadosamente

26
estimados y explicados a los distintos usuarios y, estos deben ser
convenientemente publicados.
Para determinar el ITRF2005 el Servicio Internacional de Rotación
de la Tierra (IERS), recopila soluciones de posición y velocidad
aportadas por distintos grupos y organismos dedicados a ello y,
obtenidas por distintas técnicas (VLBI, LLR, SLR; GPS, entre otros). La
densificación se realiza en general con técnicas GPS y existen variadas
agrupaciones científicas que establecen redes de densificación.
2.1.1.16 SISTEMA WGS-84
El Sistema Geodésico Mundial 1984 WGS-84 (World Geodetic
System 1984), creado por la Agencia de Mapeo del Departamento de
Defensa de los Estados Unidos de América (Defence Mapping Agency –
DMA, actualmente NIMA), para sustentar la cartografía producida en
dicha institución.
Este sistema geodésico está estrechamente ligado al desarrollo del
Sistema de Posicionamiento Global (GPS) sirviendo durante mucho
tiempo para expresar las posiciones tanto de los puntos terrestres
como de los satélites integrantes del segmento espacial.
El WGS-84 se ha popularizado por el uso intensivo del GPS y se
han determinado parámetros de transformación para convertir
coordenadas a todos los sistemas geodésicos locales y otros sistemas
geocéntricos (como ITRF 2000).

27
Tiene asociado un elipsoide de referencia donde el origen coincide
con el centro de masas de la Tierra. Los parámetros del elipsoide son:
� Semieje menor a = 6.378.137 m
� Achatamiento
El sistema se define para una Tierra estándar rotando con
velocidad constante alrededor de un polo medio, incluye por tanto un
modelo de la Tierra que queda definido por una serie de parámetros
primarios y secundarios.
Los parámetros primarios son velocidad angular de rotación y la
masa del elipsoide, que coincide con la masa de la Tierra
a) Velocidad angular de la Tierra ω = 7292115 x 10-11 rad/s
b) Constante de gravitación terrestre µ = 3986005 x 108 m3s-2
Los parámetros secundarios definen el modelo de gravedad utilizado
y, que está formado por el coeficiente gravitacional y la velocidad de la
luz en el vacío.
c) Coeficiente gravitacional de segundo grado normalizado:
C20 = -484,1669 x
d) Velocidad de la luz en el vacío c= 299792458 m/s
El sistema queda materializado por la posición de 5 estaciones,
que son las encargadas de controlar los satélites de la constelación
GPS, constituyendo así un marco de referencia terrestre.

28
La DMA llegó a la definición de este sistema después de haber
utilizados otros tres anteriores: WGS-60, WGS-66 y WGS-72, este
último es muy parecido al actual WGS-84, al punto que para pasar de
uno a otro sólo es necesario un corrimiento del origen de coordenadas
de 4,5 m, una rotación del eje Z de 0,814 segundos de arco y una
diferencia de factor de escala de –0,6 ppm.
El WGS-84(G730 -año juliano-) tiene diferencias del orden de 10
cm con ITRF92 y WGS84 (G830) tiene diferencias de
aproximadamente 2 cm con ITRF94. Lo que indica una consistencia
entre ambos sistemas.
2.1.1.17 SISTEMA SIRGAS
El Sistema de Referencia Geocéntrico para las Américas SIRGAS,
estableció un marco de referencia único para el continente
sudamericano, en conexión con el Marco de Referencia Terrestre
Internacional (ITRF). El proyecto fue generado en Asunción, en 1993,
bajo los auspicios de la Asociación Internacional de Geodesia (IAG), el
Instituto Panamericano de Geografía e Historia (IPGH) y la Agencia
Nacional de Mapas e Imágenes de los Estados Unidos de América
(NIMA).
La primera campaña de medición se realizó en 1995, mediante
observaciones GPS en 58 estaciones (8 en Chile) distribuidas en 11
países. El procesamiento de los datos se llevó a cabo en el Instituto
Alemán de Investigaciones Geodésicas (DGFI) con el software
BERNESE y en la NIMA con el software GIPSY. El resultado de esta

29
campaña de mediciones definió coordenadas referidas a ITRF 95, 4,
con precisión científica.
Entre el 10 y el 19 de mayo de 2000 tuvo lugar la segunda
campaña, denominada SIRGAS 2000, en la cual el número de puntos
se ha visto incrementado, particularmente por la inclusión de
estaciones GPS en los mareógrafos. Esta segunda campaña tiene por
objeto aportar datos que permitan, a mediano plazo, evaluar las
velocidades tectónicas de los puntos que definen el marco de
referencia, las que resultan indispensables para el mantenimiento de
un sistema geodésico de alta precisión. La solución de SIRGAS 2000 se
llevó a cabo en Alemania y Brasil.
La adopción de SIRGAS por parte de varios países sudamericanos,
como referencia para los sistemas geodésicos nacionales, refleja la
tendencia global hacia la compatibilidad de éstos con las tecnologías
modernas. En Chile la adopción de este sistema ya es una realidad.
2.1.1.18 TRANSFORMACION DE COORDENADAS
La transformación entre estos dos sistemas coordenados se debe
realizar a partir de las siguientes fórmulas utilizando los parámetros
del elipsoide de referencia que se esté utilizando.

30
Tabla 2.1: Fórmulas de transformaciones de coordenadas,
Fuente: (Manual de Carreteras Vol. II)
2.1.1.19 CARTOGRAFÍA
La cartografía estudia los diferentes métodos o sistemas para
representar sobre un plano una zona o la totalidad de la superficie
terrestre, de modo que las deformaciones que se produzcan sean
mínimas y siempre conocidas.

31
2.1.1.20 PROYECCIONES CARTOGRÁFICAS
La ubicación de los puntos dados por un sistema de referencia
está dada por las coordenadas de los mismos y éstas son de tipo:
cartesianas (X, Y, Z) ó geodésicas (φ, λ, h). La conversión de uno a
otro tipo se resuelve mediante algoritmos conocidos y disponibles en
innumerables software.
La representación de las coordenadas geodésicas puede hacerse
pero las líneas curvas que representan meridianos y paralelos no
pueden dibujarse con facilidad. La dificultad surge por el hecho, de
transferir la superficie de la Tierra a un plano, por tal motivo se han
desarrollado las proyecciones cartográficas de muy diversos tipos y
tratando de satisfacer distintos objetivos.
2.1.1.21 CLASIFICACIÓN DE LAS PROYECCIONES
CARTOGRÁFICAS
Existen varios tipos de proyecciones que permiten una
representación parcial o total de la Tierra, estas proyecciones se
diferencian por el método de elaboración que tiene, los cuales
permiten diferenciar cualidades en la red de coordenadas proyectada.
En consecuencia las proyecciones se pueden clasificar según:

32
2.1.1.21.1 SEGÚN MÉTODO DE CONSTRUCCIÓN
a) Geométricas: se basan en los principios de la geometría plana
y espacial que determinan la posición de un punto en la
superficie proyectada con respecto a un punto de origen.
Perspectivas: Se originan a partir del trazado de rayos con origen
en un “foco” que proyectan la red de paralelos y meridianos sobre un
plano tangente a la superficie de referencia
• Ortográfica: Aquella en la cual los rayos yacen ortogonal al
plano de proyección. Por lo tanto se asume el foco a una
distancia infinita del plano de proyección.
• Estereográfica: El foco de esta proyección está
diametralmente opuesto al punto de tangencia de la
superficie de referencia con el plano de proyección.
• Gnomónica: Aquella en la cual el foco se localiza en el centro
de la superficie de referencia.
Seudoperspectivas: En este tipo de proyecciones, se recurre a
algún artificio para obtener una característica especial de la
proyección. Por ejemplo, aquellas proyecciones perspectivas en que el
foco se sitúa en el punto diametralmente opuesto de cada elemento a
proyectar
b) Analíticas: pierden el sentido geométrico en beneficio de la
mantención de algunas propiedades especiales.

33
c) Convencionales: a diferencia de las analíticas, estas se basan
en convenciones arbitrarias en función de las cuales
determinan sus expresiones matemáticas
2.1.1.21.2 SEGÚN SUPERFICIE DE PROYECCIÓN UTILIZADA
Se refiere a si la superficie en la cual se proyectan las
coordenadas corresponde a un plano o a una superficie desarrollable.
Se pueden subdividir en:
a) Planas o azimutales: se considera el plano de proyección
como tangente o secante al Datum de referencia.
Comúnmente son llamadas azimutales ya que mantienen el
azimut para los puntos coincidentes con el lugar de tangencia.
b) Desarrollables: parten de una superficie geométrica
desarrollable que “envuelve” a la figura de referencia, como
es el caso de un cilindro, un cono (o muchos conos sucesivos
como el caso de la proyección policónica) o un poliedro para
luego extenderlo formando un plano final de proyección.
2.1.1.21.3 SEGÚN SITUACIÓN DE LA SUPERFICIE DE
PROYECCIÓN
Esta clasificación se realiza en función de la posición espacial de la
superficie de proyección para el caso de las proyecciones planas o
desarrollables. Las planas se clasifican en:

34
a) Polares: Centro de proyección en el polo y eje de rotación
perpendicular al plano de proyección.
b) Ecuatoriales: Centro de proyección coincidente con el
ecuador y eje de rotación paralelo al plano de proyección.
c) Oblicuas: Centro de proyección en un lugar distinto al polo y
el ecuador, es decir el eje de rotación permanece inclinado
con relación al plano de proyección
Mientras que las proyecciones desarrollables se clasifican en:
a) Normal: Eje del cono coincidente con el eje de rotación
b) Ecuatorial: Eje del cilindro coincidente con el eje de rotación
c) Transversa: Eje del cono perpendicular al eje de rotación
d) Transversa o meridiana: Eje del cilindro perpendicular al eje
de rotación
e) Oblicuas: Eje del cono o cilindro inclinado en relación al eje
de rotación
2.1.1.21.4 SEGÚN LAS PROPIEDADES QUE CONSERVAN
Las proyecciones cartográficas pueden clasificarse en función de
alguna propiedad especial que mantengan.
a) Equidistantes: Son aquellas que cumplen con manifestar
nulas deformaciones lineales manteniendo constante la
relación entre una magnitud lineal medida en la proyección,
la magnitud lineal en la superficie de referencia. Posee un

35
módulo de deformación lineal “L” unitario y las elipses
indicatrices de Tissot, poseen un semieje de magnitud
unitaria orientado sobre la línea de equidistancia.
La condición de equidistancia es válida para ciertas líneas en la
proyección. Según el sentido de ellas pueden sub clasificarse en:
i. Equidistante meridiana: la equidistancia se mantiene en el
sentido de los meridianos.
ii. Equidistante transversa: la equidistancia se mantiene en el
sentido de los paralelos.
iii. Equidistante azimutal u ortodrómica: la equidistancia se
mantiene en la dirección de los círculos máximos que pasan por el
centro de proyección.
b) Equivalentes: Se conserva una relación constante entre las
áreas de los elementos representados y la superficie de
referencia. El módulo de deformación superficial “S” es
unitario y las elipses indicatrices de Tissot trazadas,
conservarán las áreas en desmedro de la excentricidad de
ellas.
c) Proyecciones conformes: Son aquellas que mantienen como
ángulos rectos las intersecciones de meridianos y paralelos.
De esta manera, son conservadas las formas de un
elemento en condiciones restringidas de extensión. De
particular interés para la geodesia y cartografía, debido a la
posibilidad que ofrece, de realizar con relativa sencillez,
precisas transformaciones angulares que permitan

36
relacionar el plano de proyección con la superficie elipsoidal.
En ellas, las elipses indicatrices de Tissot se proyectan como
circunferencias de radios variables
d) Proyecciones afilácticas: no mantienen ángulos, ni áreas, ni
escalas lineales, sin embargo, mantienen alguna otra
propiedad importante de destacar y que justifica su
construcción, por ejemplo, la proyección gnomónica, que no
mantiene ninguna de las características anteriormente
señaladas, pero que justifica su construcción en el hecho
que las loxodrómicas se proyectan como líneas rectas,
facilitando así la navegación apoyada en cartografía. En
estas proyecciones, el comportamiento de las indicatrices de
Tissot dependerá de la característica principal de la
proyección.
Para identificar una proyección se realiza de la siguiente manera:
1. Superficie de la proyección (cónica, cilíndrica ó acimutal).
2. Posición del eje con relación a los polos (polar, ecuatorial u
oblicua).
3. Propiedad que esta conserva (conforme, equivalente ó
equidistante).
4. Punto de vista de la proyección (ortográfica, estereográfica
ó gnomónicas).

37
Comúnmente las proyecciones son conocidas por el nombre del
autor de ellas, así por ejemplo la proyección cilíndrica ecuatorial
conforme, es conocida como Mercator, otro ejemplo es la proyección
Gauss-Krüger.
2.1.1.22 PROYECCIÓN UNIVERSAL TRANSVERSAL DE
MERCATOR (UTM)
La representación en UTM, es recomendada para países como
Chile, extendidos a lo largo de un meridiano, derivado de la proyección
Gauss-Krüger, pero la diferencia fundamental entre ambas, radica en
que la Gauss-Krüger concibe un cilindro transverso tangente a la
esfera en un meridiano central, que por no tener distorsión, tendrá un
factor de escala igual a 1, por el contrario la proyección UTM concibe
un cilindro secante al elipsoide con un meridiano central cuyo factor de
escala es igual a 0,9996.
Para que la proyección UTM cubra toda la superficie de referencia,
se recurre a dividir al elipsoide en husos (60) de igual amplitud (6º). El
primer huso está comprendido entre las longitudes 180ºW y 174ºW.
Los husos crecen y se enumeran desde el primero en dirección oeste,
de esta forma, el meridiano Greenwich es la separación entre los
husos 30 y 31. Chile esta comprendido en los husos 18 y 19 con los
meridianos centrales 75ºW y 69ºW respectivamente. Los parámetros
de la proyección UTM son:

38
Latitud de origen 0º
Factor de escala (K0) 0,9996
Ancho de huso 6º
Falso Este (FE) 500.000m
Falso Norte (FN) 10.000.000m
Tabla 2.2: Parámetros de la proyección UTM, extraída del MCV2
2.1.1.23 PROYECCIÓN LOCAL TRANSVERSAL DE
MERCATOR (LTM)
La proyección LTM, al igual que la UTM, es de tipo Transversal de
Mercator (TM), lo que implica un sistema cilíndrico transverso
conforme, al que se le han impuesto ciertos parámetros específicos
con el propósito de crear cartografía de precisión aplicable a proyectos
de ingeniería.
A medida que se produce un alejamiento en sentido este-oeste,
desde el meridiano central, aumentan las deformaciones causadas por
los problemas propios de la proyección. Es por ello que se adoptó
originalmente una precisión en el meridiano central de 1:200.000, lo
que implica un factor de escala de Ko = 0,999995.
Debido al valor del factor de escala cercano a 1, indica que las
líneas de secancia están más cerca del meridiano central
(aproximadamente 1’51”), por ello se ha determinado una cobertura
en sentido este-oeste para el huso LTM de 1º.

39
Cuando se presenten proyectos cuya extensión en sentido este-
oeste sea de 1º de longitud, se deberán establecer cuantos husos LTM
de 1º sean necesarios para cubrir toda la superficie a proyectar, en
este caso se establecerán zonas de traslape que cumplan con las
tolerancias del proyecto en ejecución y ecuaciones de coordenadas en
las fronteras de los husos para poder relacionarlos en el transcurso del
proyecto o estudio. Los parámetros de la proyección LTM son:
� Falso Norte (FN) = 0 m (Hemisferio Norte) y 7.000.000 m
� (Hemisferio Sur).
� Falso Este (FE) = 200.000 m en el meridiano central (MC).
� Factor de escala en MC = 0,999995
2.1.1.24 PLANOS TOPOGRÁFICOS LOCALES (PTL)
Los planos topográficos locales, nacen por la necesidad de obtener
mayor Equivalencia entre las distancias proyectadas y las distancias
horizontales de terreno, con el fin de evitar cálculos engorrosos en el
traspaso de los datos. Debido que los datos de terreno, antes de ser
proyectados, es necesario proyectarlos en el elipsoide para
posteriormente traspasarlos a la proyección. Esto se logra corrigiendo
las distancias y reduciendo los ángulos. Si se necesita realizar el
proceso inverso (replantear) se debe realizar el mismo procedimiento,
lo que constituye un enorme trabajo en la mayoría de los casos, donde
puede inducir a errores o faltas, por lo tanto una perdida de tiempo
importante.

40
Con la idea de lograr mayor precisión y evitar todo tipo de
cálculos que puedan provocar algún tipo de error, basados en la
proyección LTM, se puede definir un cilindro cuyo manto coincida o sea
muy próximo a la superficie terrestre, referido a una altura promedio
(HPTL), con el propósito de evitar realizar las reducciones al elipsoide
los ángulos y distancias de terreno.
Para definir el cilindro a la superficie estudiada, basta con
reemplazar el factor de escala Ko por el factor de escala referido a la
altura del PTL (hPTL) Kh definiendo así un Sistema Plano Topográfico
Local georreferenciado, e individualizado por la altura. En
consecuencia, el transporte de coordenadas en el Plano Topográfico
Local se realizará con topografía tradicional y trabajando directamente
con la información topográfica de terreno.
Con el fin de mantener una coherencia entre los datos y el orden
de control del proyecto o estudio, se debe considerar que la diferencia
producida entre la distancia horizontal de terreno y la distancia
proyectada (en el PTL), esté en tolerancia. Además se contempla que
la diferencia de alturas de los puntos de todo el proyecto, no debe
excederse del rango de ±300 m respecto de la altura del PTL (hPTL).
Cumpliéndose las condiciones anteriores, se evita realizar todo tipo de
reducciones, logrando el objetivo principal de los PTL.
La definición del factor de escala específico está dado por la
siguiente expresión:

41
Donde:
Kh Local = factor de escala local en el meridiano central.
hPTL = altura del PTL
R = radio medio = 6.378.000 m
Por lo tanto, parámetros del sistema se expresan en la tabla 2.3,
donde vienen especificados los siguientes campos: Nº de PTL, Altura
PTL, factor de escala local Kh, meridiano central local MCL y el
intervalo de alturas.
Plano PTL
Altura PTL Intervalo de alturas
Nº (m)
Kh MCL
(m)
1 550 1,000086234 70º 30` 250 a 850
Tabla 2.3: extraída del MCV2
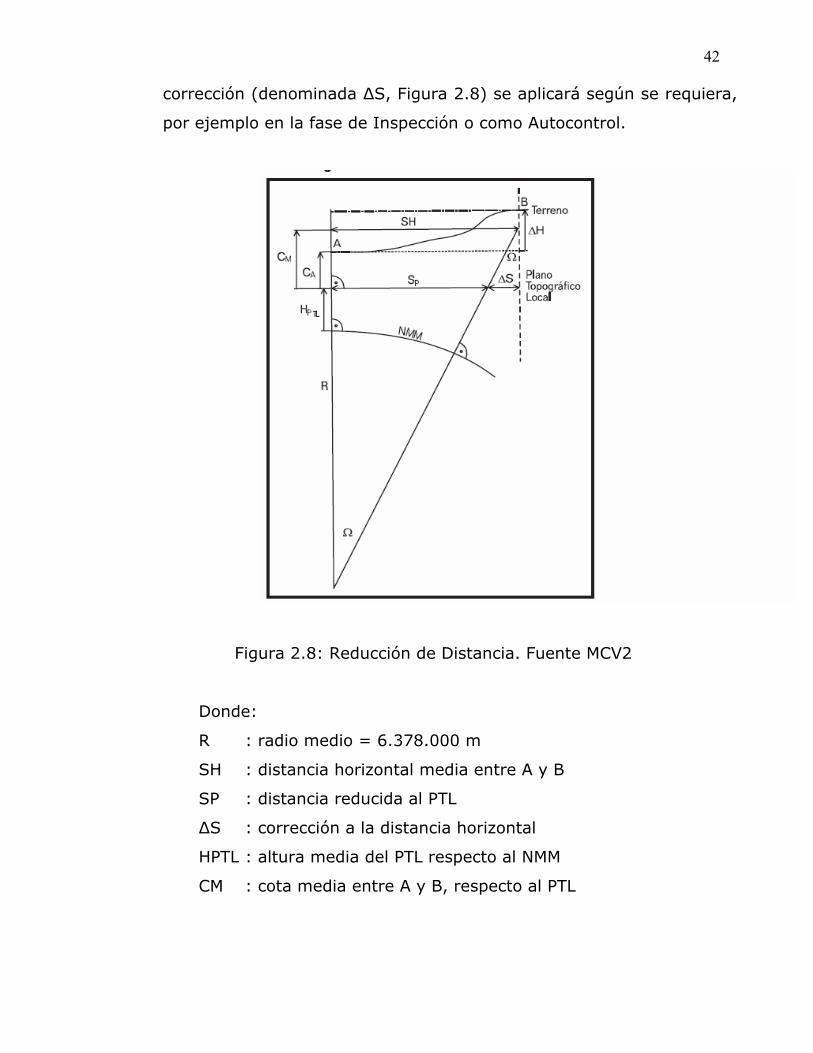
2.1.1.25 REDUCCIÓN DE DISTANCIA PTL A DISTANCIAS
HORIZONTALES DE TERRENO
Cuando se define un PTL, uno de los objetivos principales es evitar
reducciones a las mediciones de terreno. Cabe recordar que el PTL
está próximo a la superficie terrestre, existe una diferencia entre la
distancia horizontal medida en terreno respecto de la distancia por
diferencia de coordenadas en el PTL. Las diferencias que se producen
están dentro de la tolerancia que se requiere, por lo tanto, la
42
corrección (denominada ∆S, Figura 2.8) se aplicará según se requiera,
por ejemplo en la fase de Inspección o como Autocontrol.
Figura 2.8: Reducción de Distancia. Fuente MCV2
Donde:
R : radio medio = 6.378.000 m
SH : distancia horizontal media entre A y B
SP : distancia reducida al PTL
∆S : corrección a la distancia horizontal
HPTL : altura media del PTL respecto al NMM
CM : cota media entre A y B, respecto al PTL

43
De la proporcionalidad de triángulos:
Considerando que (HPTL + CM) es de magnitud pequeña frente a
R, la expresión, se escribe:

44
CAPÍTULO III: DESARROLLO
3.1 INTRODUCCIÓN
El presente capítulo contiene el problema y la posible solución que
se aplica al transportar las coordenadas georreferenciadas, a partir de
bases de puntos con coordenadas UTM, en el proyecto de la extensión
de la Línea 5 del Metro. Todo esto referido a lo estipulado en el Manual
de Carreteras en su capítulo 2.300 “Ingeniería Básica – Aspectos
Geodésicos y Topográficos”, aplicándose a todo Sistema de Transporte
de Coordenadas, como es el caso de este proyecto.
En este capítulo también se da a conocer el sistema de replanteo
y el control geométrico usado en este tipo de obras, para lo cual se
describe y explica la maximización de los recursos disponibles como
son el uso de Estaciones Totales (implementación de un Roadline) y el
uso de calculadoras científicas (desarrollo de programas de replanteo).
Se explica también que el sistema de transporte de coordenadas
junto con el sistema de replanteo y el control geométrico de los
túneles, van de la mano para lograr un producto final, con un error
despreciable. Este producto final se refiere al encuentro de dos túneles
los cuales van en sentido opuesto y los cuales deben encontrarse en
un punto definido con anterioridad con un error menor o igual a la
tolerancia máxima impuesta para este proyecto. El sistema
constructivo utilizado para este proyecto se denomina NATM, el cual es

45
un nuevo método austriaco de diseño y construcción de túneles, del
cual se verán algunos tópicos mas adelante.
3.2 ANTECEDENTES GENERALES
Teniendo en cuenta que las tecnologías que se utilizan en
proyectos de ingeniería, ya sean el uso de topografía, fotogrametría,
Sistema de posicionamiento global (GPS), Sistemas de Información
Geográfica (SIG), entre otros, han ido avanzando, es por lo que se
hace necesario que las normativas que rigen este tipo de proyectos de
ingeniería en el país, se actualicen y normen el uso de estas
tecnologías. Es por esto que el Manual de Carreteras actualizó el año
2001 su Volumen 2, en su capítulo 2.300 “Ingeniería Básica –
Aspectos Geodésicos y Topográficos”, aplicándose a todos los trabajos
topográficos, incluyendo el que se tratará en el presente capítulo.
El proyecto que se trata a continuación pertenece a la obra de la
Empresa de Transporte de Pasajeros METRO S.A., la cual corresponde
a la extensión de la Línea 5, la que une las comunas de Quinta Normal
y Maipú, cuenta con once nuevas estaciones las cuales van desde la
unión con la Estación Quinta Normal, hasta llegar a la Estación Plaza
de Maipú, pasando por las estaciones Gruta de Lourdes, Blanqueado,
Lo Prado, San Pablo (futura conexión con Línea 1), Pudahuel,
Barrancas, Laguna Sur, Las Parcelas, Monte Tabor, Santiago Bueras y
por último Plaza de Maipú. Este nuevo tramo de Metro tiene por
finalidad aliviar la congestión de pasajeros en los horarios pick que se
produce en otras líneas del Metro y en el sistema de transporte urbano

46
en la superficie, además de densificar sus redes para acercar más
personas al Metro.
En el presente capítulo se analizan aspectos geodésicos como
Referenciación Geodésica y la materialización de Sistema de
Transporte de Coordenadas, Proyecciones UTM (Universal Transversal
de Mercator), Proyecciones LTM (Local Transversal de Mercator),
factores de escala, PTL (Plano Topográfico Local). Aspectos
topográficos como sistema de transporte de coordenadas,
programación básica en estaciones totales y calculadoras científicas
para replanteo de puntos, además de control geométrico de los túneles
y sistemas constructivos. A continuación se presentan algunas
imágenes para ilustrar más claramente el proyecto. En las figuras 3.1
y 3.2 se muestra la extensión de la Línea 5.

47
Figura 3.1: Muestra la nueva extensión de la Línea 5 del
Metro de Santiago, Maipú – Quinta Normal. Fuente:
www.metrosantiago.cl

48
Figura 3.2: Muestra las estaciones de la nueva extensión de la
Línea 5 del Metro de Santiago, Maipú – Quinta Normal
3.3 ETAPAS DEL PROYECTO
La primera etapa para este proyecto fue la realización de un
Levantamiento Aerofotogramétrico, en el año 2006, la cual de acuerdo
a lo solicitado por la Empresa METRO S.A., se realizó un Vuelo especial
Color a escala 1:2.000, sobre un eje delimitado. La Estereorestitución
digital se realizó a escala 1:500, en formato (DWG) para Autocad, con
Ortorectificación digital.

49
Para todo el Tramo Quinta Normal - Maipú, se realizó un vuelo
Aerofotogramétrico, escala 1:5.000, el cual consta del siguiente
material fotográfico:
LINEA VUELO FOTOGRAFIAS
Nº 4 29868 al 29878
Nº 5 29882 al 29886
Nº 6 29890 al 29912
Nº 7 29916 al 29920
Nº 8 29924 al 29940
Nº 9 29944 al 29953
Tabla 3.1: Muestra detalles del vuelo realizado
El equipamiento utilizado en el vuelo fotogramétrico fue un avión
CESSNA 401-A Bimotor con un equipo de navegación GPS Garmin y
acondicionado con una compuerta eléctrica para la nivelación y
transporte de la cámara. El avión cuenta con un Kit fotogramétrico
instalado en Florida, USA, especialmente para la instalación y
manipulación de la cámara aérea.
El techo de servicio es de 24.000 Pies y los dos motores del avión
aseguraron el máximo de estabilidad durante la toma aérea. La
resolución de la imagen fue controlada, reduciéndose la resolución al
mínimo para evitar el desplazamiento de la imagen en relación a la
velocidad del avión y el tiempo de exposición.
El equipo utilizado para la toma de fotografías fue una cámara
fotogramétrica ZEISS RMK-A 15/23, focal 152,52, tipo de lente
PLEGON A, fotografías formato 23 x 23 cm. El tema de la toma de
fotografías aéreas es solo información complementaria y no se
ahondará en esta memoria.

50
Para la fotogrametría se debe contar con un control terrestre,
puntos que se tomaron mediante mediciones GPS, utilizando
georreceptores satelitales geodésicos de doble y simple frecuencia
para todo el eje a levantar. El objetivo de la etapa de control o apoyo
terrestre a la fotogrametría, básicamente consiste en determinar la
posición planimétrica de todos aquellos puntos de control necesarios
para transferir la información contenida en el modelo estereoscópico.
Una vez terminado este proceso se obtiene el producto final, el cual es
la cartografía de todo el sector a intervenir.

51
Figura 3.3: Muestra la cartografía del sector a intervenir

52
3.4 GEORREFERENCIACIÓN DEL PROYECTO
El proceso de georreferenciación consiste básicamente en ligar o
relacionar una información geográfica a unos puntos en común, es
decir poder llevar toda la información a unas coordenadas bases para
que posteriormente otros datos se puedan unir al mismo y estos
guarden la misma relación, gracias a la georreferenciación que da un
marco genérico para trabajar. En esta etapa se considera el proceso y
mediciones utilizando georreceptores satelitales (GPS) geodésicos de
doble y simple frecuencia para todo el eje a levantar.
Para la referenciación planimétrica en terreno se debe definir una
serie de parámetros tanto cartográficos, geodésicos y topográficos. Se
debe definir una proyección cartográfica que satisfaga la tolerancia del
proyecto y los parámetros geodésicos como por ejemplo el elipsoide,
datum, etc. para que no haya diferencias durante el proyecto o no se
mezclen distintos tipos de datos. Además de un plano topográfico local
con una altura elipsoidal definida para el transporte de coordenadas.
53
3.4.1 DETERMINACIÓN DE BASES GPS
El posicionamiento de los puntos de las líneas base a lo largo del
eje al que está referido este estudio, constituye la componente
esencial, debido a la calidad de control que adquieren las coordenadas
desprendidas de este procedimiento, para el resto de mediciones que
se realizarán a continuación.
Las bases se obtuvieron empleando métodos que consideran el
uso de receptores GPS geodésicos. Este método se empleó para la
densificación GPS de líneas bases a lo largo del proyecto. Estas líneas
bases se dispusieron distanciadas cada 1000 metros aproximadamente
e intervisibles entre si.
El proceso de medición se desarrolló sobre las líneas de manera
independiente, considerando los lados de las figuras y sus diagonales y
tiempos de medición en método estático. Para el proceso de medición
se utilizó posicionamiento estático midiendo y registrando pseudos
distancias satélite del centro eléctrico de la antena y fase de la onda
portadora en las frecuencias L1 y L2.
Las mediciones fueron simultáneas en el tiempo, para su posterior
procesamiento diferencial de las líneas. Las mediciones fueron
continuas y por un período mínimo de 30 minutos con PDOP inferior a
6 y ángulo de elevación superior a 10 grados sobre el horizonte de la
antena. Para cada medición se procede a medir la altura de la antena
antes y después de la sesión, hora de inicio y fin, y cualquier hecho

54
relevante durante la medición queda registrado para el procesamiento
de los datos (post proceso diferencial de las líneas).
Las mediciones fueron realizadas por una empresa externa, la cual
entregó todos los datos crudos determinados en formato RINEX, los
cuales fueron procesados por esa empresa, mediante software
especializado.
En el proceso de levantamiento mediante GPS, se midieron un
total de 16 puntos, los cuales están distribuidos a lo largo de todo el
proyecto (Figura 3.4). Una vez determinada la red GPS primaria a lo
largo del proyecto, se generó una poligonal cerrada, cuyo cierre se
encuentra dentro de los estándares de precisión requeridos. La
compensación, se obtuvo empleando un software especializado.

55
Figura 3.4: Muestra esquema de distribución de los puntos

56
3.4.2 PROCESAMIENTO DE LOS DATOS
Al momento de recibir los datos crudos de las mediciones GPS, se
procede a procesar los datos por medio del Software Trimble
Geomatics Office (TGO). Esto se hace para poder tener un modelo de
comparación entre los datos entregados por la empresa externa.
La Ligazón a la Red Básica, está constituida por los 16 vértices,
los cuales están distribuidos a lo largo de todo el proyecto. Se trabaja
fijando los puntos a la estación permanente “SANT”, perteneciente a la
red SIRGAS.
El proceso se realizó importando los archivos RINEX de la estación
SANT y los archivos .dat obtenidos de la medición de los puntos en
terreno. Se procedió a insertar las coordenadas de SANT con calidad
de control para luego procesar todos los vectores independientes que
conforman esta Red. Posteriormente se realizan circuitos en figuras
cerradas
El resultado del procesamiento de comparación, se hace un
balance entre la información que entrega el proceso como por
ejemplo, el tipo de solución, valores estadísticos, valores en el cierre
de los circuitos realizados y características adicionales, que permiten
evaluar el procesamiento, encontrándose diferencias mínimas entre
ambos procesos.
El informe del procesamiento GPS permite visualizar la calidad de
los vectores, basándose en el tipo de solución obtenida de datos

57
estadísticos y de esos valores en el cierre de los circuitos realizados.
Además de este informe, el programa muestra la ubicación general de
la red de puntos.
3.4.3 CÁLCULO DE COORDENADAS UTM DE LOS PUNTOS
GPS
Para el cálculo de las coordenadas de cada uno de los puntos GPS,
es necesario contar con las coordenadas cartesianas de la estación
permanente “SANT”, punto de control para esta red, al cual aplicar los
incrementos ajustados, y así contar con coordenadas para los puntos
de control.
Si se desea visualizar los incrementos de los vectores obtenidos
en el procesamiento de las líneas de la red, para el cálculo manual de
las coordenadas, el programa cuenta dentro de sus informes
adicionales con la información de Datos Vector GPS, el cual muestra
los incrementos en X, Y y Z
3.4.4 AJUSTE DE COORDENADAS
El ajuste de coordenadas se realiza mediante el Software Trimble
Geomatics Office (TGO). El proceso de ajuste se realiza de forma
interna, el cual al finalizar entrega un informe mostrando un cuadro
con las coordenadas finales ajustadas.

58
3.5 SISTEMA DE PROYECCIÓN
Para la representación a escala de una porción de la Tierra, sobre
una superficie plana, ya sea un plano o una carta, se necesita un
sistema de proyección con reglas claras y precisas, que considere la
curvatura del área de la Tierra a ser representada y también que
considere la variable, la cual depende de las diferentes alturas a que
se encuentran los puntos que van a ser representados, respecto de
una superficie de referencia. En Chile, por la forma de su territorio,
largo y angosto, el cual se orienta a lo largo en sentido norte – sur, se
adopta para su proyección cartográfica, el Sistema de Proyección UTM
(Universal Transversal de Mercator), el cual es recomendado para
países como Chile, extendidos a lo largo de un meridiano, por ser una
proyección conforme, lo que significa que tiene la ventaja de conservar
los ángulos, y por lo tanto mantiene las formas, dentro de ciertos
límites de extensión, pero tiene la desventaja de no conservar las
áreas y presentar deformaciones lineales. El Sistema de Proyección
UTM es una proyección cilíndrica, en la cual se proyecta el globo
terrestre.
El gran problema de la proyección UTM es que su uso se prohíbe
para proyectos de ingeniería, ya que introduce deformaciones por el
factor de escala, el cual depende de la altura. Es por esto que cuando
se estén representando terrenos que posean una cota mayor que la
del NMM, las distancias que se obtienen en el plano entre dos puntos,
son menores que las que se medirán en terreno. Es por esto que
cuanto mayor sea la altura y la distancia, mayor será la diferencia
entre las dos distancias.

59
Esta prohibición de uso se debe principalmente porque las
deformaciones que se producen debido al factor de escala, se hacen
evidentes a escalas grandes (1:5000; 1:1000; 1:500, etc.) y las
precisiones que se requieren en el proyecto resultan incompatibles
tanto gráficas como numéricas. Para la solución de este problema el
Manual de Carreteras propone lo siguiente:
“Definir “Sistemas Locales Transversales de Mercator” (LTM) cuya
cobertura se extiende sólo ½ grado a cada lado de un cierto meridiano
central (Normalmente en los grados enteros o medios grados de las
coordenadas geodésicas). Allí se puede apreciar que para 1º (aprox.
52.5km a cada lado del meridiano central en el extremo norte de
Chile), se tienen precisiones en el borde del huso del orden de
1:33.000, es decir superiores a las de un control secundario, y si la
extensión utilizada no supera los 35km a cada lado del meridiano
central, las precisiones son del orden de 1:100.000, muy superior a la
precisión de un orden de control primario. Con ello se solucionan los
problemas de proyección que presenta el sistema UTM.
Y definir “Planos Topográficos Locales” con los que se resuelve el
problema de reducción de distancias que se deriva de la diferencia de
cota de los distintos sectores de un proyecto”

60
3.5.1 USO DEL SISTEMA DE PROYECCIÓN LOCAL
TRANSVERSAL DE MERCATOR (LTM)
La proyección Local Transversal de Mercator (LTM) busca cubrir
las necesidades cartográficas de proyección conforme de alta precisión
para proyectos de ingeniería. Al igual que la UTM corresponde a un
sistema cilíndrico transverso conforme secante, pero con parámetros
particulares que la individualizan y que permiten mediante la
manipulación del ancho de huso y factor de escala, el incrementar la
precisión en la representación de los elementos. Originalmente fue
concebida como una herramienta de apoyo a los proyectos de
ingeniería vial donde debe representarse el terreno con gran precisión.
Las precisiones obtenidas para esta proyección son matemáticamente
muy superiores a las obtenidas en la proyección UTM.
Pese a que se recomienda que el meridiano central corresponda a
grados enteros o medio grados, en proyectos de ingeniería se debe
considerar en una primera instancia, que el meridiano central de la
proyección sea coincidente con el área de estudio para lograr así un
cubrimiento total. Para áreas extensas o mayores precisiones, se
recomienda usar múltiples fajas que abarquen el total del área de
estudio y/o que cumplan con la precisión señalada.
Para referenciar el sistema de transporte de coordenadas del
proyecto a la proyección LTM se adopta un Meridiano Central Local
(MCL) en la longitud -70º 30`. Este Meridiano Central se elige debido
a la cercanía del proyecto con éste. De esta forma los límites del huso
se encuentran en las longitudes -70º y -71. Esto quiere decir que todo

61
el proyecto está referido al meridiano central del huso para su
proyección.
3.5.2 DETERMINACIÓN DE PLANOS TOPOGRÁFICOS
LOCALES
La forma de relacionar coordenadas sobre el elipsoide, en el plano
de proyección LTM y posteriormente en el terreno, implica arduas
labores de cálculo y con esto la posibilidad cierta de cometer errores
de distinto tipo haciendo aún más complicada la racionalización del
espacio por medio de la cartografía. Como una forma de solucionar la
discrepancia existente entre mediciones en terreno y cartografía sobre
un plano de proyección, se debe considerar un cilindro que pase por el
terreno topográfico constituyendo así un plano topográfico local (PTL).
Se considera que la precisión para el proyecto es de 1/40.000, lo
que equivale a 25 ppm, por lo tanto los desniveles del terreno respecto
del PTL no deben superar los 159,45m, por lo cual se adopta un
desnivel máximo de 150m.
La diferencia de altura entre la estación de control más alta y la
más baja no es más de 50 metros aproximadamente, lo que justifica el
uso de un solo plano PTL de acuerdo a lo establecido en el Manual de
Carreteras con respecto al uso y aplicación de Planos Topográficos
Locales.
Desprendido de lo anterior, se determina el Plano Topográfico
Local, el cual está a 500 metros, que es aproximadamente el promedio
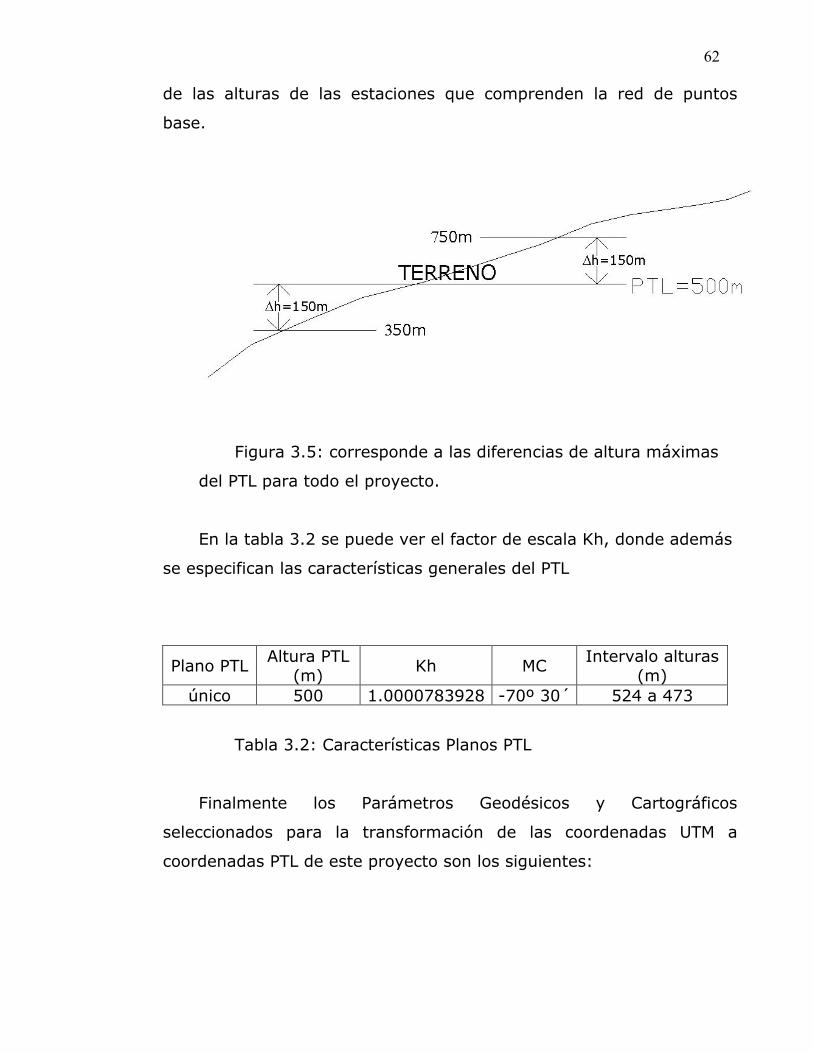
62
de las alturas de las estaciones que comprenden la red de puntos
base.
Figura 3.5: corresponde a las diferencias de altura máximas
del PTL para todo el proyecto.
En la tabla 3.2 se puede ver el factor de escala Kh, donde además
se especifican las características generales del PTL
Plano PTL Altura PTL
(m) Kh MC
Intervalo alturas (m)
único 500 1.0000783928 -70º 30´ 524 a 473
Tabla 3.2: Características Planos PTL
Finalmente los Parámetros Geodésicos y Cartográficos
seleccionados para la transformación de las coordenadas UTM a
coordenadas PTL de este proyecto son los siguientes:

63
Datum : WGS-84
Proyección : LTM (Local Transversal de Mercator)
PTL (Plano Topográfico Local) h=500m
Parámetros de Proyección:
MC Local = -70º 30`
FN Local = 10.000.000m
FE Local = 500.000m
Kh Local = 1,000078393
3.6 SISTEMA DE TRANSPORTE DE COORDENADAS
Las coordenadas de control obtenidas en el proceso anterior
tienen la función de ligar coordenadas obtenidas en terreno a un
sistema de referencia conocido. Mediante estas coordenadas obtenidas
por GPS, las cuales corresponden a coordenadas PTL se genera una
poligonal principal, la cual será la base para los futuros trabajos de
replanteo de las obras.
3.6.1 POLIGONAL PRINCIPAL
Debido a la gran extensión de este proyecto, es porque se separó
en distintos tramos para su estudio y ejecución, por lo tanto de acá en
adelante se tratará la poligonal correspondiente al Tramo 1, el cual
corresponde al sector comprendido entre las estaciones Gruta de
Lourdes y Lo Prado, con una extensión de 3,6 kilómetros.

64
La poligonal principal tiene como objetivo principal la validación de
las coordenadas, pudiendo determinarse de este modo discrepancias
entre coordenadas o cualquier otro tipo de problema que pudiera
afectar el desarrollo del proyecto. Esta poligonal tiene también como
objetivo materializar más puntos de control para la construcción del
túnel, los cuales se encuentren ligados directamente sobre este
sistema principal de transporte de coordenadas.
3.6.2 PLANIFICACIÓN
Para densificar el sistema de transporte de coordenadas (STC) a
partir de las Líneas Bases, se necesita realizar la poligonal cerrada de
enlace. Partiendo del par de puntos M065 – M064, ubicados en el
sector de la estación San Pablo, para cerrar contra el par de puntos
M077 – M078, ubicados en el sector de la estación Gruta de Lourdes,
pasando por los puntos de control intermedios entre estos dos pares
de puntos de control. La verificación distanciométrica entre puntos
consecutivos debe ser mejor o igual que 1:20.000.
Para la medición de ángulos y distancias destinados al cálculo de
coordenadas de la poligonal, se utilizará el método de reiteración, que
se caracteriza principalmente porque las mediciones angulares se
realizan calando en diferentes partes del limbo, con el anteojo en sus
dos posiciones; directa y tránsito. Con el equipo de trabajo de
topografía, se planificó un procedimiento especial para la realización
de las reiteraciones, el cual debe ser realizado de igual manera por
todos quienes lo apliquen en este trabajo, el cual se detallará a
continuación.

65
3.6.3 PROCEDIMIENTO POLIGONAL
Para el procedimiento de la poligonal, previamente es necesario
verificar primeramente el estado del equipo a utilizar, la constante del
prisma y llevar los elementos necesarios para la correcta realización
del procedimiento. Entre estos elementos de suma importancia para la
realización de las lecturas, se debe contar además de los equipos
topográficos tradicionales, con un termómetro y dos bases nivelantes
para hacer las lecturas, además de todo el material normalmente
utilizado en topografía.
Para la toma de datos, una vez instalados en los puntos
correspondientes, al momento de realizar las mediciones se debe
anotar en el registro de terreno la temperatura ambiente, la presión
atmosférica, además de la altura instrumental y altura de cada base
nivelante. Una vez iniciada la toma de datos se leen los ángulos
horizontal y vertical en directa y tránsito (se realiza calando en
diferentes partes del limbo, con el anteojo en sus dos posiciones),
además de la distancia inclinada. Este procedimiento se realiza al
menos cuatro veces.
Se debe elaborar un registro de terreno, el cual debe ser
comprensible para el profesional que realizará la poligonal como para
el que realiza el cálculo y la compensación de coordenadas. Una vez
hecho el registro y el croquis se debe iniciar con la toma de datos, los
cuales se hacen de la siguiente manera:

66
Se cala al punto B1, se gira el instrumento en sentido de los
punteros del reloj hacia la base B2. Se anotan en el registro los
ángulos horizontal, vertical y distancia inclinada leídos al punto de
calaje B1 y al punto B2. Luego se gira el instrumento en tránsito y se
lee nuevamente a B2, luego se finaliza este proceso leyendo a B1 en
tránsito. Este procedimiento se realiza cuatro veces como se muestra
en la figura 3.7.
Figura 3.6: Muestra posicionamiento para reiteraciones
Una vez concluida esta primera etapa se realiza el cálculo del
ángulo horizontal reducido promedio y se compara con los ángulos
interiores reducidos obtenidos. En caso de que alguno de ellos se
alejara del promedio en +/- 10cc, se debe repetir aquella lectura. Una
vez finalizado este proceso y verificando que los ángulos leídos
cumplen con lo exigido, se procede a la medición del suplemento.
La medición del suplemento se realiza como una manera de
comprobación de las medidas angulares, ya que puede ser considerada
como una medición redundante. Para la lectura del suplemento
angular, se utiliza el mismo registro y procedimiento que se utilizó en
la lectura del ángulo interior, es decir cuatro lecturas en directa y en
B1
EST.
B2

67
tránsito. En este caso se cala en la base B2, y se lee hacia la base B1
(en directa y tránsito). Finalizada la toma de datos se procede al
cálculo del promedio del ángulo horizontal reducido. Se verifica si
alguno de los ángulos medidos se aleja del promedio en +/- 10cc.
Calculado el promedio del suplemento se suma con el ángulo
interior promedio, donde la sumatoria de los dos debe dar 400 g, con
una tolerancia de +/- 10cc. En caso de no cumplir con la tolerancia se
debiera repetir alguna de las mediciones, tanto del ángulo interior o
complemento, (verificar si alguna de las lecturas tomadas se aleja los
10cc).
Ejemplo:
Áng. Int.= 180.9997 (promedio)
Áng. Ext.= 219.0006 (promedio)
Sumatoria= 400.0005 g
Como se puede ver en el ejemplo, si cumple la tolerancia se
pasa a la otra etapa (medición del ángulo vertical y distancia
inclinada). Para la medición del ángulo vertical y distancia inclinada, se
debe instalar en B2 y leer a la estación. Se debe medir a lo menos
cuatro veces el ángulo vertical (directa y tránsito), lo mismo con la
distancia inclinada. Estas medidas se anotan en el mismo registro de la
toma de datos del ángulo interior. Se debe verificar que la sumatoria
del ángulo vertical en directa y tránsito debe sumar 400 g, con una
tolerancia de +/- 10cc. Si no cumple con la tolerancia se debe repetir.
68
Ejemplo:
Áng. Vert. B1= 100 (directa)
Áng. Vert. B1= 300.0010 (tránsito)
Sumatoria = 400.0010 g
Es importante recalcar que cada vez que se realice la medición de
la distancia inclinada se debe anotar la temperatura, ya que dentro del
cálculo de distancia se toman en cuenta también la temperatura
ambiente (afecta la trayectoria de la señal), presión atmosférica (solo
una medición es necesaria para todo el proyecto ya que la variación de
presión producto de los cambios de altura entre sus puntos es
despreciable) y la precisión del distanciómetro en partes por millón
(ppm), para realizar las correspondientes correcciones en la distancia
electrónica medidas sobre el prisma. En la tabla a continuación se
muestra un ejemplo de registro utilizado para las mediciones mediante
reiteraciones.

69
Tabla 3.3: Muestra un ejemplo del registro utilizado para las
mediciones mediante reiteraciones
25
DI
TRIM
BLE 3605
29,01,08
T°=
FINAL
REDUCC
INSTRUMENTO:
FECHA:
VR(T)
VR(D)
hj
D SAMBUCETI
1,578
PUNTO
FINAL
203,4544
OPE
RADOR:
HI:
REDUCC
203,4544
203,4542
203,4543
203,4548
PROM
0,0006
3,4550
100,0007
103,4549
0,0005
3,45475
100,0010
103,4558
BLA
NQUEADO
M69
HZ(T)
200,0013
3,4545
300,0014
103,4547
0,001
203,4537
100,002
303,4555
HZ(D)
0,0000
203,4555
99,9999
303,455
200,0000
3,4558
300,0000
103,4561
TRABAJO
:
ESTACION:
PUNTO
BLA
N
M70
BLA
N
M70
BLA
N
M70
BLA
N
M70
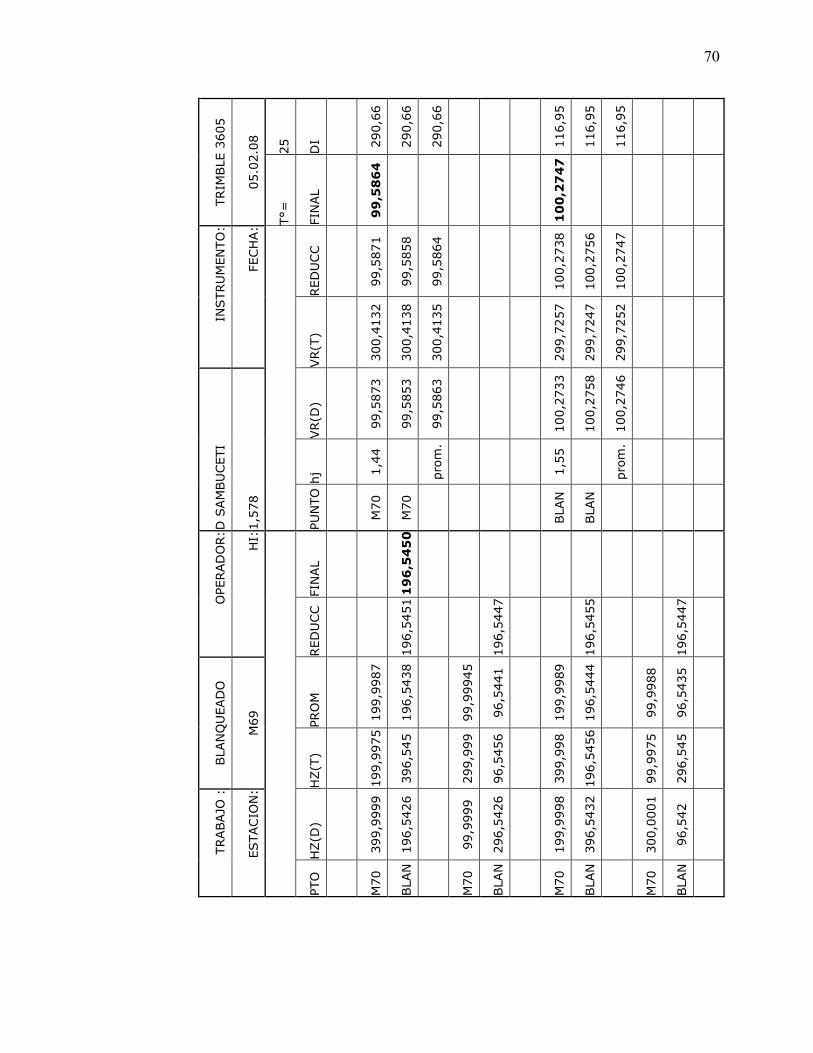
70
25
DI 290,66
290,66
290,66
116,95
116,95
116,95
TRIM
BLE 3605
05.02.08
T°=
FINAL
99,5864
100,2747
REDUCC
99,5871
99,5858
99,5864
100,2738
100,2756
100,2747
INSTRUMENTO:
FECHA:
VR(T)
300,4132
300,4138
300,4135
299,7257
299,7247
299,7252
VR(D)
99,5873
99,5853
99,5863
100,2733
100,2758
100,2746
hj 1,44
prom.
1,55
prom.
D SAMBUCETI
1,578
PUNTO
M70
M70
BLA
N
BLA
N
FINAL
196,5450
OPE
RADOR:
HI:
REDUCC
196,5451
196,5447
196,5455
196,5447
PROM
199,9987
196,5438
99,99945
96,5441
199,9989
196,5444
99,9988
96,5435
BLA
NQUEADO
M69
HZ(T)
199,9975
396,545
299,999
96,5456
399,998
196,5456
99,9975
296,545
HZ(D)
399,9999
196,5426
99,9999
296,5426
199,9998
396,5432
300,0001
96,542
TRABAJO
:
ESTACION:
PTO
M70
BLA
N
M70
BLA
N
M70
BLA
N
M70
BLA
N

71
Una vez terminada la campaña de toma de datos, se procede a
calcular las coordenadas de los puntos por los cuales se pasó con la
poligonal, además se calculan las coordenadas de los puntos de control
y con esto se tiene un parámetro de comparación entre las
coordenadas PTL calculadas y las mismas coordenadas calculadas
mediante topografía clásica.
3.6.4 CÁLCULO POLIGONAL PTL
Las poligonales para el plano topográfico se desarrolla de la
misma manera que para una poligonal topográfica, pero corrigiéndola
con los factores de escala correspondientes, cada uno de los planos
establecidos para este caso. Por otra parte los ángulos, considerando
que esta proyección es conforme, no se ven mayormente afectados y,
por lo tanto, no sufren correcciones. Los azimutes y coordenadas
obtenidas para cada estación pueden observarse en la Tabla
Para el cálculo de las coordenadas se crea una hoja de cálculo en
Excel, basándose en los fundamentos teóricos de la topografía clásica
pero corrigiéndola con los factores de escala correspondientes.
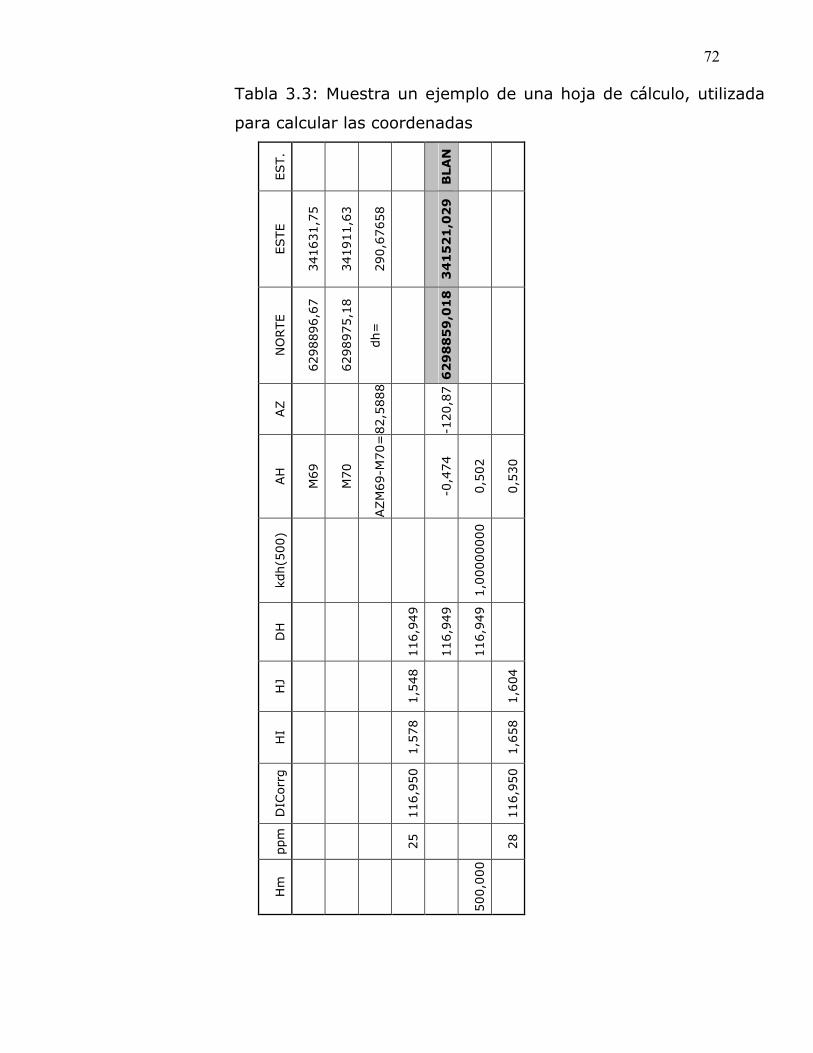
72
Tabla 3.3: Muestra un ejemplo de una hoja de cálculo, utilizada
para calcular las coordenadas
EST.
BLAN
ESTE
341631,75
341911,63
290,67658
341521,029
NORTE
6298896,67
6298975,18
dh=
6298859,018
AZ
82,5888
-120,87
AH
M69
M70
AZM69-M
70=
-0,474
0,502
0,530
kdh(500)
1,00000000
DH
116,949
116,949
116,949
HJ
1,548
1,604
HI
1,578
1,658
DICorrg
116,950
116,950
ppm
25
28
Hm
500,000
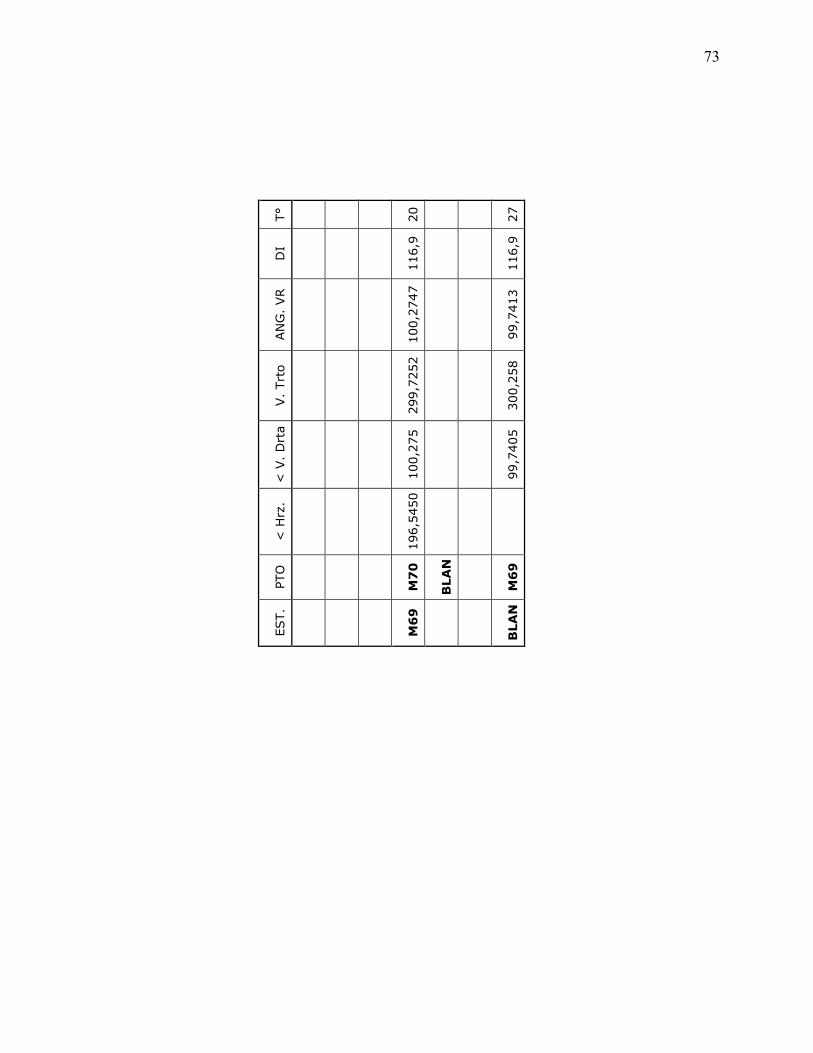
73
T°
20
27
DI
116,9
116,9
ANG. VR
100,2747
99,7413
V. Trto
299,7252
300,258
< V. Drta
100,275
99,7405
< Hrz.
196,5450
PTO
M70
BLAN
M69
EST.
M69
BLAN

74
De la hoja de cálculo (Tabla 3.3)se puede observar que se
ingresan datos obtenidos de la medición como el ángulo horizontal
reducido promedio, los promedios del ángulo vertical en directa y en
tránsito, la altura del PTL, la altura instrumental y altura de las bases,
la distancia inclinada promedio, la temperatura y la presión ambiente.
Con todos estos datos se calcula:
El ángulo vertical reducido promedio, la corrección de la distancia
debido a la refracción en ppm, la distancia inclinada corregida, la
distancia horizontal, el factor de escala debido a la altura, cota
trigonométrica, los delta Norte y Este, para finalmente calcular las
coordenadas finales de cada punto.
Para la reducción del ángulo vertical promedio, se calcula con los
promedios del ángulo vertical en directa y en tránsito, mediante la
expresión:
Donde:
: es el ángulo Vertical reducido promedio
: es el ángulo Vertical promedio, leído en Directa
: es el ángulo Vertical promedio, leído en Tránsito

75
3.6.5 REDUCCIONES DE DISTANCIA
Para las reducciones de distancia es necesario hacer varios
cálculos antes de llegar a la distancia inclinada reducida para luego
poder calcular la distancia horizontal.
Para entender mejor este punto es necesario saber que la
distancia inclinada leída en terreno es una distancia electrónica a la
cual hay que hacerle distintas reducciones y correcciones para llegar a
la distancia inclinada reducida final.
Para llegar a la distancia inclinada reducida final, hay que hacerle
correcciones a la distancia por refracción. Además se debe hacer
correcciones al ángulo vertical leído en terreno. Esto se esquematiza y
se explica a continuación:
De = Distancia electrónica
Refracción
DG = Distancia Geométrica
Reducción ángulo vertical
Di = Distancia Inclinada
Dh = Distancia Horizontal
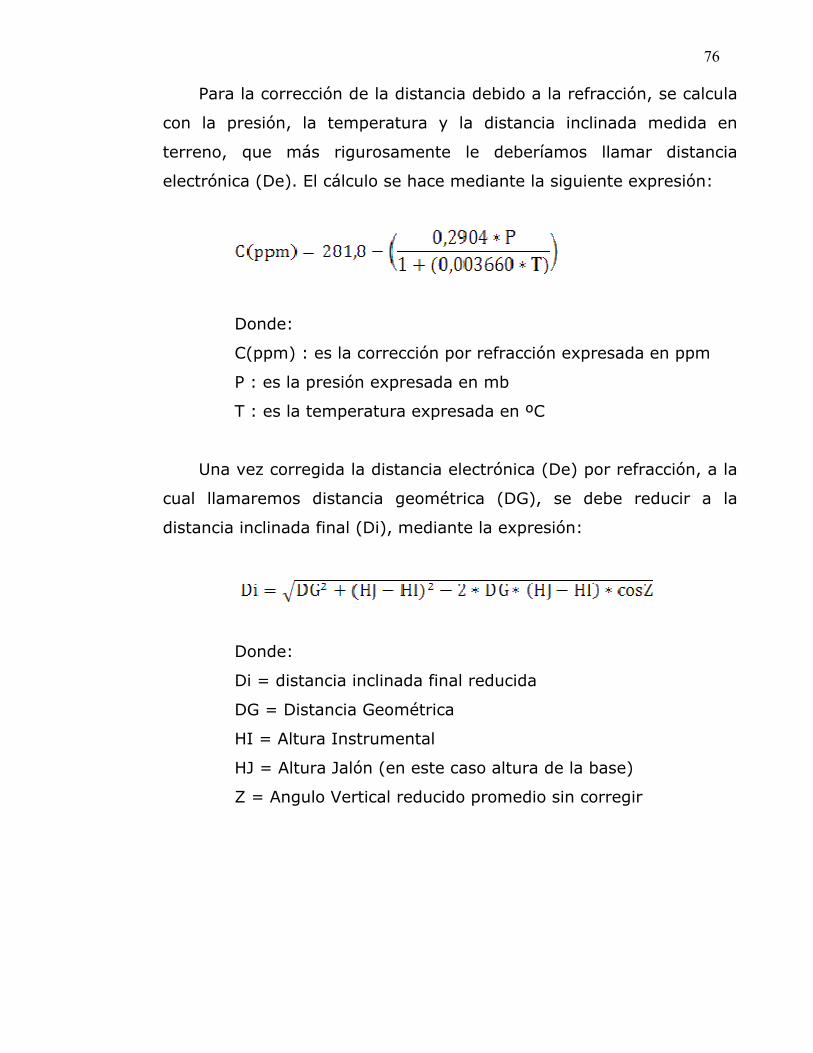
76
Para la corrección de la distancia debido a la refracción, se calcula
con la presión, la temperatura y la distancia inclinada medida en
terreno, que más rigurosamente le deberíamos llamar distancia
electrónica (De). El cálculo se hace mediante la siguiente expresión:
Donde:
C(ppm) : es la corrección por refracción expresada en ppm
P : es la presión expresada en mb
T : es la temperatura expresada en ºC
Una vez corregida la distancia electrónica (De) por refracción, a la
cual llamaremos distancia geométrica (DG), se debe reducir a la
distancia inclinada final (Di), mediante la expresión:
Donde:
Di = distancia inclinada final reducida
DG = Distancia Geométrica
HI = Altura Instrumental
HJ = Altura Jalón (en este caso altura de la base)
Z = Angulo Vertical reducido promedio sin corregir

77
Para el cálculo de la Distancia Horizontal se debe hacer una última
corrección, la cual consiste en reducir el ángulo Vertical reducido
promedio (Z) a la línea de la Distancia inclinada corregida (Di). Esta
corrección se hace mediante la expresión:
Donde:
CZ = Corrección del ángulo Vertical (Z) a la línea (en
radianes)
HI = Altura Instrumental
HJ = Altura Jalón (en este caso altura de la base)
Di = distancia inclinada final reducida
Finalmente la última reducción a la distancia, es la distancia
horizontal. Se calcula mediante la expresión:
Donde:
DH = Distancia Horizontal
Di = distancia inclinada final reducida
Zc = Angulo Vertical reducido promedio (corregido)
78
3.6.6 NIVELACIÓN GEOMÉTRICA DE LOS PR
Después de que se ha realizado la poligonal electrónica, es
necesario asignarles a cada punto de referencia PR, una cota
geométrica. El procedimiento apropiado para transportar el sistema
altimétrico de referencia para este tipo de proyectos, es la nivelación
geométrica de precisión.
La implementación de la nivelación geométrica de precisión en un
proyecto vial dependerá casi exclusivamente de la escala a utilizar,
donde ésta debe ser mayor o igual que 1:20000.
El desarrollo de la nivelación geométrica de precisión se realiza
por el método de nivelación cerrada, partiendo de un punto conocido y
cerrando sobre el mismo, pasando por todos los puntos de referencia
PR ya establecidos. Para los puntos de cambio se utiliza un aparato
preparado en terreno, hecho de estructura metálica, el cual posee tres
puntos de apoyo y en la parte superior un soporte para apoyar la mira,
el cual asegura estabilidad y solidez. El equipo utilizado es un nivel
automático marca Leica, modelo Runner 24, el cual posee precisión de
+/-2mm y aumento de 24X, lo cual posibilita apreciar los milímetros
en la mira. Además del nivel se utilizaron miras de madera, a los
cuales se incorporó un nivel esférico, el cual permite ajustar su
verticalidad.

79
La tolerancia en el error de cierre de la nivelación geométrica de
precisión, está dada por la expresión:
e(mm) ≤ 10
Donde:
e(mm) : error de cierre expresado en milímetros
k : longitud del circuito de la nivelación
geométrica expresada en km).
3.6.7 VALIDACIÓN POLIGONAL
Se efectúa la validación de la poligonal principal. La comparación
se efectúa entre los puntos medidos mediante GPS, los cuales poseen
coordenadas PTL y los mismos puntos validando sus coordenadas
mediante poligonales de enlace.
A continuación se pone como ejemplo la poligonal realizada en el
Tramo 1 para validar las coordenadas, la cual considera doce puntos
base, los cuales comprenden el sector entre Estación Gruta de Lourdes
y Estación San Pablo.

80
Tabla 3.5: Diferencia de coordenadas en proceso de
validación
COORDENADAS METRO
COORDENADAS VALIDADAS
DIFERENCIA (m)
PTO NORTE ESTE NORTE ESTE NORTE ESTE M015 6290807,185 336964,117 6290807,185 336964,117 0,000 0,000 M016 6291740,265 336954,741 6291740,265 336954,741 0,000 0,000 M017 6292743,986 336921,869 6292743,981 336921,866 0,005 0,003 M018 6293681,051 337418,368 6293681,054 337418,372 0,003 0,004 M019 6294639,051 337653,716 6294639,058 337653,708 0,007 0,008 M020 6295623,859 337741,505 6295623,851 337741,509 0,008 0,004 M021 6296536,383 337868,807 6296536,387 337868,817 0,004 0,010 M022 6297473,951 338075,927 6297473,962 338075,931 0,011 0,004 M023 6297356,609 338582,121 6297356,603 338582,116 0,006 0,005 M024 6298453,271 338392,643 6298453,277 338392,647 0,006 0,004 M025 6298465,417 339614,848 6298465,422 339614,852 0,005 0,004 M026 6298609,791 340621,774 6298609,787 340621,771 0,004 0,003 M027 6298896,670 341631,789 6298896,673 341631,787 0,003 0,002 M028 6299033,952 342527,392 6299033,948 342527,397 0,004 0,005 M029 6299142,912 343255,936 6299142,910 343255,933 0,002 0,003 M030 6298951,772 344023,691 6298951,776 344023,696 0,004 0,005
Tabla 3.6: Comparación distancias terreno y PTL
BASE DISTANCIA PTL
(m) DISTANCIA
TERRENO (m) PRECISION M017-M018 1060,473 1060,483 1:100000 M019-M020 988,713 988,699 1:70000 M021-M022 960,173 960,179 1:160000 M023-M024 1112,910 1112,921 1:100000 M025-M026 1017,224 1017,215 1:99000 M027-M028 906,064 906,069 1:150000 M029-M030 791,190 791,197 1:120000

81
3.7 TÚNELES ANDEN ESTACIÓN
Las estaciones se componen de un pique de acceso construido
desde la superficie y dos túneles; el de acceso, que es transversal al
trazado y el de andenes, alineado con éste.
La construcción subterránea de las estaciones serán ejecutadas a
través del pique y túnel de acceso exclusivamente e incluye la
excavación y sostenimiento primario y secundario de los tramos
Oriente y Poniente del túnel de andenes, contemplando la excavación
y sostenimiento primario del túnel de acceso.
El túnel de acceso a las estaciones considera una sección típica
para todas las galerías de acceso a estación, presenta una sección
ovoidal, de anillo cerrado, con 12m de ancho y 12,7m de alto. La
sección transversal es de aproximadamente 124m² y la tapada al nivel
de clave varía entre 11m a 6m, siendo ésta menor para el sector de la
Estación Blanqueado. El túnel andén de las estaciones presenta 14,8m
de ancho y 11,7m de alto. La sección transversal es de
aproximadamente 139m² y la tapada al nivel de clave varía entre 13m
y 7,5m
La construcción de las galerías prevé la subdivisión de la sección
en dos frentes independizados (bóveda y banco/contrabóveda). El
revestimiento primario presenta un espesor uniforme de 35cm.
La estación y los sectores de obras en tuneleado son indicados en
las figuras siguientes:

82
Figura 3.7: Planta Estación Gruta de Lourdes
Figura 3.8: Planta Estación Blanqueado

83
Figura 3.9: Planta Estación Lo Prado
Figura 3.10: Túnel Acceso – Formas

84
Figura 3.11: Túnel Andén - Formas
3.7.1 ACCESOS INTERMEDIOS, TÚNELES INTERESTACIÓN
Los túneles interestación serán construidos desde los siguientes
puntos de acometida: Estación Gruta de Lourdes, túneles interestación
asociados al pique de acceso intermedio Simón Bolívar, túneles
interestación asociados al pique de acceso Casilda, Estación
Blanqueado, Estación Lo Prado.
Los túneles interestación a construirse presentan una sección
transversal de aproximadamente entre 60 a 62m². La clave del túnel
se encuentra aproximadamente entre 3,5m a 15m de profundidad.
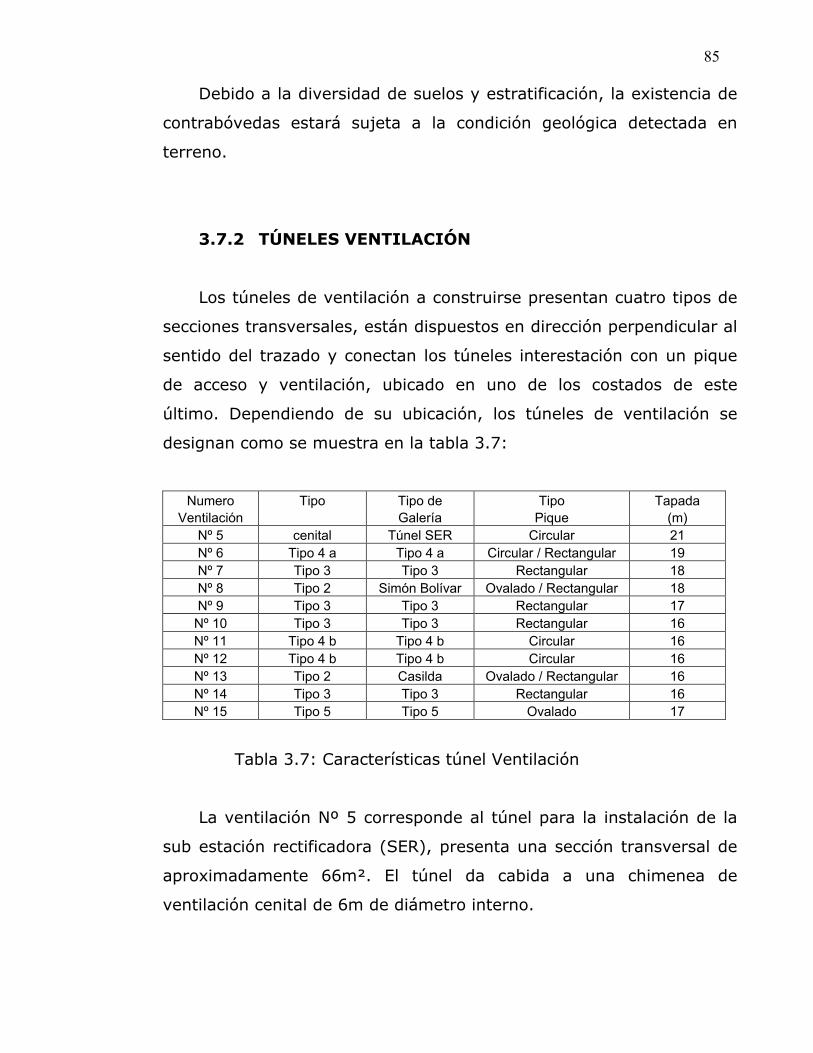
85
Debido a la diversidad de suelos y estratificación, la existencia de
contrabóvedas estará sujeta a la condición geológica detectada en
terreno.
3.7.2 TÚNELES VENTILACIÓN
Los túneles de ventilación a construirse presentan cuatro tipos de
secciones transversales, están dispuestos en dirección perpendicular al
sentido del trazado y conectan los túneles interestación con un pique
de acceso y ventilación, ubicado en uno de los costados de este
último. Dependiendo de su ubicación, los túneles de ventilación se
designan como se muestra en la tabla 3.7:
Numero Tipo Tipo de Tipo Tapada
Ventilación Galería Pique (m)
Nº 5 cenital Túnel SER Circular 21
Nº 6 Tipo 4 a Tipo 4 a Circular / Rectangular 19
Nº 7 Tipo 3 Tipo 3 Rectangular 18
Nº 8 Tipo 2 Simón Bolívar Ovalado / Rectangular 18
Nº 9 Tipo 3 Tipo 3 Rectangular 17
Nº 10 Tipo 3 Tipo 3 Rectangular 16
Nº 11 Tipo 4 b Tipo 4 b Circular 16
Nº 12 Tipo 4 b Tipo 4 b Circular 16
Nº 13 Tipo 2 Casilda Ovalado / Rectangular 16
Nº 14 Tipo 3 Tipo 3 Rectangular 16
Nº 15 Tipo 5 Tipo 5 Ovalado 17
Tabla 3.7: Características túnel Ventilación
La ventilación Nº 5 corresponde al túnel para la instalación de la
sub estación rectificadora (SER), presenta una sección transversal de
aproximadamente 66m². El túnel da cabida a una chimenea de
ventilación cenital de 6m de diámetro interno.

86
Las ventilaciones tipo 4 corresponden a galerías de sección
transversal de 29m² de excavación, éstas intersectan a una chimenea
de ventilación circular de diámetro interno de 6m. Se diferencian las
Tipo 4ª y 4b en la salida a la superficie de la chimenea. La ventilación
tipo 4ª tendrá en la superficie una sección rectangular definitiva por lo
que parte de la sección circular de la chimenea será demolida en una
etapa posterior, en cambio las tipo 4b su salida a la superficie será de
sección circular.
Las ventilaciones Tipo 3 y Tipo 5 son de una sección de 54m² de
excavación y se diferencian en el tipo de chimenea a la cual se
conecta, la ventilación Tipo 3 se conecta a un pique rectangular de
12x3m, en cambio la Tipo 5 se conecta a un pique ovalado de
aproximadamente 11x7m. A continuación se muestran imágenes de
las ventilaciones en las figuras siguientes:

87
Figura 3.12: Planta Ventilación Tipo 4
Figura 3.13: Elevación Ventilación Tipo 4

88
Figura 3.14: Planta Ventilación Tipo 3

89
Figura 3.15: Elevación Ventilación Tipo 4
3.8 INTRODUCCIÓN AL SISTEMA CONSTRUCTIVO DE LOS
TÚNELES
La obra forma parte de los trabajos previos para la construcción
de la futura extensión de la Línea 5 del Metro de Santiago que
considera el trazado desde la comuna de Quinta Normal hasta Maipú.
En este trabajo debido a la gran extensión del proyecto se detallará el
proceso constructivo del Tramo 1 del proyecto. Este tramo considera la
construcción de las obras previas de tres estaciones, correspondiente a
los piques de Gruta de Lourdes, Blanqueado y Lo Prado, de las futuras
estaciones. Además comprende la construcción de las obras previas de

90
los nueve piques de ventilación y de los dos piques interestación,
correspondientes a Simón Bolívar y Casilda, los cuales deben cumplir a
futuro la función de ventilación y además de una vía de escape en caso
que se suscite alguna emergencia dentro del túnel.
Cada uno de los piques comprende a sus respectivos túneles de
acceso, para luego continuar con la construcción de los túneles de
estación, interestación y ventilación. Para la ejecución de los piques se
realiza preliminarmente el cierre del entorno a los piques, la limpieza
del sector y las modificaciones de servicios públicos, ya sean
electricidad, gas, telefonía, cable, alcantarillado y agua potable
contempladas por el proyecto, además de todas las obras necesarias
para garantizar los requerimientos mínimos de ejecución y estadía.
Una vez realizadas las labores preliminares se procede con la
construcción de los piques que se regirán de acuerdo a instrucciones
contenidas en planos y especificaciones técnicas. El pique se construye
con excavación vertical a partir de la viga brocal de hormigón armado,
moldeado contraterreno. Este elemento sirve como guía para la
verticalidad de la pared del pique, evitando sobreexcavaciones y
pérdidas del perfil teórico. Una vez ejecutado el brocal se continúa
excavando con profundidades de hasta 2 metros, dividiendo la planta
en dos secciones y trabajando alternativamente. Las paredes del pique
se fortifican mediante hormigón proyectado (shotcrete) y mallas
electrosoldadas de refuerzo. Se realizan refuerzos especiales en forma
de anillo en el nivel superior y medio de la bóveda del túnel de acceso,
formando un marco que dará estabilidad en la etapa de la excavación
de la bóveda del túnel de acceso.
91
Los túneles se construirán utilizando la técnica del método
austriaco NATM (New Austrian Tunneling Method), que será
respetando la secuencia y avance indicado en los planos y
especificaciones técnicas. El método NATM, el cual nació en Europa en
la segunda mitad del siglo XX y que consiste en una excavación
secuencial a sección completa de la sección transversal de un túnel,
seguida cíclicamente de la instalación inmediata de un revestimiento
primario temporal que combina el uso de hormigón proyectado
reforzado con mallas o fibras metálicas, pernos de anclaje, marcos
metálicos y/o barras de refuerzo, otorgando al terreno un
confinamiento suficiente para que éste pueda participar activamente
en la función portante. El método consiste en la excavación a sección
completa y un inmediato sostenimiento primario de hormigón
proyectado con un mallazo, y la colocación de bulones como elementos
de sujeción de cuñas, y cerchas metálicas de sujeción, si son
necesarias.
En Chile se ha creado una variante a este método, el cual es
caracterizado básicamente por el empleo del hormigón proyectado
como soporte primario. Los conceptos inherentes al método nacieron
en forma analítica durante la construcción de túneles en macizos
rocosos de los Alpes. El subsuelo puede/debe ser partícipe en la
función portante de la cavidad. La participación se logra permitiendo
que el subsuelo se deforme se activa la resistencia al corte. Para
aumentar la función portante del suelo, debe proveerse a éste un
confinamiento radial. Junto con la excavación se instala el soporte
primario (shotcrete) más los marcos, lo que es flexible para permitir la
deformación del macizo y que, a medida que se deforma, confiere

92
confinamiento a éste, logrando la estabilización con participación
prioritaria en la acción portante por parte del macizo.
La excavación de túneles es del tipo convencional con frente
abierto, vale decir que se emplean maquinas excavadoras, martinetes
hidráulicos o maquinas rozadoras de corte parcial. Desde el nivel de
operación estas maquinas deberán tener un alcance mínimo de 7m en
vertical y 5m en horizontal. La forma de la geometría de excavación
puede ser aleatoria y se puede variar con gran facilidad. Pueden
generarse fácilmente, geometrías compuestas (cavidades de dos o tres
celdas). Las Deformaciones del soporte primario y cargas actuantes
sobre él son monitoreadas a través de instrumentación, cuyos
resultados son usados para efectuar ajustes en el soporte y la
secuencia de excavación
A partir de este pique se inician las excavaciones, sin recurrir a
explosivos dada la naturaleza favorable del subsuelo, avanzando
simultáneamente en dos direcciones opuestas y en tramos cortos de
no más de un metro. Para su sostenimiento, la bóveda del túnel es
revestida inmediatamente con hormigón proyectado (shotcrete)
reforzado con malla metálica, marcos reticulados envueltos en el
hormigón proyectado y pernos sellados en toda su longitud.
Posteriormente, se instala el revestimiento definitivo de hormigón
armado de alta resistencia, hasta obtener el ancho de las paredes del
túnel especificado.
A medida que se avanza, se instalan las mangas de ventilación,
que permiten efectuar los trabajos al interior del túnel, en una
atmósfera libre de polvo. Este método constructivo de túneles, de

93
desarrollo local, tiene la ventaja de reducir las interferencias en la
superficie a costos similares y equivalentes al método a "tajo abierto"
(cavar y tapar).
3.9 SISTEMA DE TRANSPORTE DE COORDENADAS AL
INTERIOR DEL PIQUE
El sistema de puntos coordenados se encuentra ubicado a un
promedio de 18m por encima del nivel donde se construiría los túneles
para las futuras nuevas estaciones y los túneles interestación, por lo
que hubo que trasportar puntos coordenados hacia el interior de los
piques para dar inicio a los trabajos de excavación. Existen dos
procedimientos distintos para bajar coordenadas al pique, estos
procedimientos dependen exclusivamente si se trata de un pique
estación o un pique interestación
3.9.1 TRANSPORTE DE COORDENADAS AL INTERIOR DE
PIQUE INTERESTACIÓN Y PIQUE VENTILACIÓN
Para el procedimiento de transporte de coordenadas al interior de
los piques de interestación y piques de ventilación, las cuales poseen
un diámetro menor que un pique de estación, se instaló una placa de
metal en la base del pique donde se pudiera tener acceso desde la
superficie mediante un plomo de 4kg diseñado especialmente para
este tipo de tareas, muy comunes en minería. Esta placa (figura 3.17),
que tiene forma de “L” invertida se halla anclada y nivelada mediante
tres pernos de sujeción, en su cara superior se encuentra soldado un

94
perno que sobresale 10mm sobre el cual es posible atornillar la base
nivelante de la estación total, asegurando una alta precisión en
posición ya que se anulan los errores producidos por la descorrección
que pudiera presentar la plomada óptica (láser). Este método es
conocido como “centrado forzado” y la placa sobre la cual se instala la
estación se denomina “consola”. Es muy importante que el perno
sobre el cual se atornilla la base nivelante de la estación total no
sobrepase los 10mm ya que podría dañar el prisma de la plomada
óptica, si no se tiene el cuidado de chequear sus dimensiones antes de
instalar el instrumento.
Figura 3.16: Muestra consola para Centrado Forzado
Se baja el plomo desde una plancha metálica fijada al borde del
brocal hasta el centro del perno de la consola, esperando hasta que el
plomo deje de oscilar, en seguida desde dos posiciones diferentes se

95
realizan tres reiteraciones con cada instrumento, haciendo calzar el
hilo vertical del retículo con la plomada. Las distancias horizontales
fueron medidas desde cada estación a la plancha metálica sobre la
cual estaba suspendido el plomo, con esto se logró determinar la
posición planimétrica de la consola, ya que sus coordenadas son las
mismas que las obtenidas sobre la placa del brocal.
El segundo punto (clavo Hilti) fue instalado en el piso solamente
para dar orientación a la consola, teniendo el carácter de provisorio, ya
que seria inmediatamente reemplazado por otro ubicado en la pared
del pique, asegurando su permanencia por lo menos hasta el término
de las excavación de la galería.
3.9.2 NIVELACIÓN GEOMÉTRICA DE LA CONSOLA
Para dar cota geométrica a la consola se utiliza una huincha
metálica de precisión que permite corregir la dilatación que sufre esta
debido a su propio peso. Una vez que se baja la huincha a la consola
se calcula la dilatación y simplemente se resta al desnivel medido
obteniendo un desnivel corregido (Dc), como la cota de la placa fue
previamente determinada con una nivelación geométrica solo es
necesario restar el Dc a la cota de la placa para obtener la cota de la
consola.

96
3.9.3 TRANSPORTE DE COORDENADAS AL INTERIOR DE
PIQUE ESTACIÓN
Para el procedimiento de transporte de coordenadas al interior de
los piques de estación, los cuales poseen un diámetro mayor que un
pique de interestación, se instaló una placa de metal en la base del
pique, al igual que el procedimiento anterior, donde se pudiera tener
acceso desde la superficie mediante lecturas directas con el
instrumento. Para este procedimiento se debe tener una estación con
coordenadas conocidas al borde del brocal y calar a otra estación
conocida en la superficie. Instalando una base nivelante en la consola
ubicada en la base del pique, y mediante reiteraciones se leen ángulos
horizontales, verticales y distancias para el posterior cálculo de las
coordenadas de la consola. Este proceso es mucho más sencillo que el
transporte de coordenadas en un pique de interestación, debido al
espacio que se dispone para realizar dicho procedimiento.
El segundo punto (clavo Hilti) fue instalado en el piso solamente
para dar orientación a la consola, teniendo el carácter de provisorio, ya
que sería inmediatamente reemplazado por otro ubicado en la pared
del pique, asegurando su permanencia por lo menos hasta el término
de las excavación de la galería.

97
3.9.4 NIVELACIÓN GEOMÉTRICA DE LA CONSOLA
El procedimiento para nivelar geométricamente la consola puede
variar del anterior, debido a la posición en que se encuentre la
consola. Por disponibilidad de espacio para el transporte de
coordenadas, la consola puede ser instalada lo más adentro del túnel
que se pueda, considerando que tiene que ser vista desde de la
superficie. Al tener esta situación el procedimiento cambia.
El procedimiento consiste en instalar un perfil de unos
50x50x5mm de aproximadamente 40cm de longitud, instalado y
afianzado sobre el brocal mediante pernos de expansión, de manera
que el ángulo quede totalmente rígido. Luego de esto debe darse cota
geométrica al perfil mediante nivelación cerrada. Una vez que se
cuenta con la cota del ángulo se utiliza una huincha metálica de
precisión, con la cual se baja la cota al interior del pique y mediante
nivelación cerrada dentro del pique se le da cota geométrica a la
consola. Para el cálculo de la cota se calcula la dilatación de la huincha
de precisión y se resta al desnivel medido obteniendo un desnivel
corregido
3.9.5 POLIGONAL INTERIOR
Una vez construida la galería acceso del pique se instaló una
segunda consola desde donde se dio inicio a los trabajos de excavación
de la estocada.

98
A medida que se avanza con las excavaciones del túnel (ya sea
estación o interestación) se da coordenadas desde la consola ubicada
en túnel acceso a pares de puntos cada 20m, uno en frente del otro
(oriente y poniente) y materializados con clavos Hilti en los muros de
los túneles. Para esta tarea se necesita que los clavos sobresalgan un
par de centímetros con lo cual se permita generar la visibilidad
necesaria como para posibilitar las medidas angulares y de distancia y
así poder instalarse con la estación total en cualquier punto cercano a
los clavos mediante estación libre. Es de suma importancia verificar
previamente la visibilidad de cada punto con la estación total instalada
en la consola, ya que se corría el riesgo de que las irregularidades de
la caja del túnel impidieran tener acceso a ellos.
Cada punto debe ser instalado y pintado con spray de color rojo
para favorecer su rápida ubicación, y ser designado con 2 letras y un
número; Las letras corresponden a su ubicación dentro del túnel y los
números se incrementaban a partir del eje del pique. Por ejemplo el
punto SO1 corresponde al primer punto instalado en el pique Sur
Oriente en un túnel estación. De ahí en más adelante, a medida que se
avanza con el túnel Sur Oriente los puntos van incrementando su
número (SO1, SO2, SO3, SO4,…). Esto se repite para todos los puntos
cardinales del túnel (figura 3.18).
Los puntos se instalan en los muros del túnel y se utilizan para
determinar las coordenadas de la estación total en cualquier lugar del
túnel que ésta se encuentre, mediante la medición de ángulos y
distancias. Este método es conocido como bisección inversa o estación
libre, siendo necesario para ello conocer las coordenadas de dos
puntos como mínimo para obtener una solución matemática, y de tres

99
(trisección inversa) o más para alcanzar un mayor grado de libertad
que asegure una mejor precisión al discriminar respecto a la calidad de
las coordenadas de los puntos elegidos.
Para las labores que se desarrollaron al interior del túnel se
utilizaron solamente dos puntos y se verificaba su precisión sobre
alguna consola, permitiéndose errores de posición de entre dos o tres
milímetros, siendo satisfactorios para el chequeo de excavación,
postura de marcos, etc. Como se dijo anteriormente, a medida que los
trabajos de excavación avanzaban era necesario transportar puntos
coordenados por el interior del túnel interestación para controlar su
correcta trayectoria y garantizar un rompimiento exitoso. El método
para controlar los pares de puntos coordenados se denomina Centrado
Forzado y se explica a continuación:
Figura 3.17: Muestra punto coordenado dispuesto en el muro del
túnel

100
3.9.6 CENTRADO FORZADO
Lo más importante para el control geométrico del túnel, es que
este no se desvíe, por lo tanto el control de coordenadas debe ser lo
mas preciso posible, para lograr así un encuentro de túneles con las
precisiones especificadas para el proyecto.
Para el control de las coordenadas en el interior de los piques se
utiliza el método conocido como Centrado Forzado, el cual consiste en
ir instalando consolas a medida que avanza el pique. Las consolas son
un punto fijo, inamovible dentro del túnel y a la cual se le da
coordenadas de control, tanto planimétricas como altimétricas. La
función que cumplen las consolas es que al ser un punto fijo, elimina
los errores de centrado para una instalación, aumentando así la
precisión. Los puntos bases materializados mediante las consolas
generan una red de puntos para generar una poligonal de control
constante dentro del túnel.
El procedimiento que se lleva a cabo es instalarse en una consola
como estación y poder visar a la consola anterior como punto de calaje
y poder así chequear las coordenadas de los pares de puntos
dispuestos en los muros del túnel y también darle coordenadas a las
calicatas siguientes. En la calicata que sirve de estación se instala el
instrumento topográfico con el cual se harán las lecturas (estación
total) y en las otras dos o mas consolas se instalan bases nivelantes,
con sus respectivos prismas y tarjetas de puntería. El proceso de
medición se hace mediante el procedimiento de reiteraciones como se
explicó anteriormente. Al hacer el cambio de estación entre los puntos,

101
es necesario solamente separar la base nivelante de la estación total y
de la tarjeta. Este proceso asegura el posicionamiento de los puntos.
Junto con el uso del equipo topográfico adecuado y el especial cuidado
en las mediciones, asegura en gran medida la alta precisión de la
tarea.
Figura 3.18: Muestra instalación de base nivelante
Figura 3.19: Muestra base nivelante instalada en consola

102
Figura 3.20: Muestra instalación de estación total sobre la
base nivelante
Figura 3.21: Muestra instalación de prisma sobre base
nivelante
A medida que avanza la excavación del túnel y debido a la gran
extensión que abarcan éstos, es que se hace imperante el cierre de la
figura contra otro punto distinto al punto de partida, para confirmar
que las coordenadas de arrastre se encuentran en la precisión
requerida. Además de la extensión de los túneles, también se debe

103
chequear debido al mismo uso del túnel, ya que por él transitan y
trabajan cantidades de personal y maquinarias.
Lo que se hace en este caso, es mediante maquinaria
especializada, hacer cada aproximadamente 200 o 300 metros,
calicatas desde la superficie hasta el túnel. Teniendo esta posibilidad
es que amarrándose a la poligonal principal que existe en la superficie,
se bajan coordenadas al túnel mediante plomo. Teniendo este nuevo
punto coordenado se puede hacer una nueva poligonal de precisión,
mediante centrado forzado, pero esta vez utilizando una poligonal
cerrada de enlace.
Figura 3.22: Muestra vista en Corte de Calicata

104
Figura 3.23: Muestra Calicata en superficie
Figura 3.24: Muestra Calicata en túnel

105
3.10 CONTROL GEOMÉTRICO DEL TÚNEL
El control geométrico del túnel se lleva paso a paso en conjunto
con las labores de construcción de éste. Siguiendo el sistema
constructivo con el cual se trabaja en este tipo de obras (NATM),
existen dos labores de crucial importancia, las cuales se deben ir
controlando. Estas son el chequeo de excavaciones y el chequeo de
postura de marcos
En general el avance de excavaciones se hace en promedio cada 1
metro. En el momento en que la maquinaria pesada termina la
excavación, es deber de los mineros perfilar la excavación y dejarla
con la terminación geométricamente correcta. Luego de que la
excavación queda revisada, se la sella mediante shocret u hormigón
proyectado (HP). Después que el sello toma una resistencia adecuada
se instalan mallas electrosoldadas, para luego seguir con la postura de
los marcos reticulados, los cuales son instalados en la posición y altura
correcta.
Para estas labores existen profesionales de la topografía, los
cuales están en terreno verificando constantemente las obras, los
cuales cumplen un rol imprescindible dentro de las faenas. Para
facilitar las labores de estos profesionales se crean programas tanto en
calculadoras como en los instrumentos topográficos, los cuales se
darán a conocer a continuación.

106
Para esto se generan dentro del túnel los tres ejes espaciales (x,
y, z), los cuales corresponden a la distancia al eje del túnel (DE), la
cota referida al nivel del andén (CR) y el kilometraje del túnel (PK).
Figura 3.25: Muestra ejes X e Y del túnel
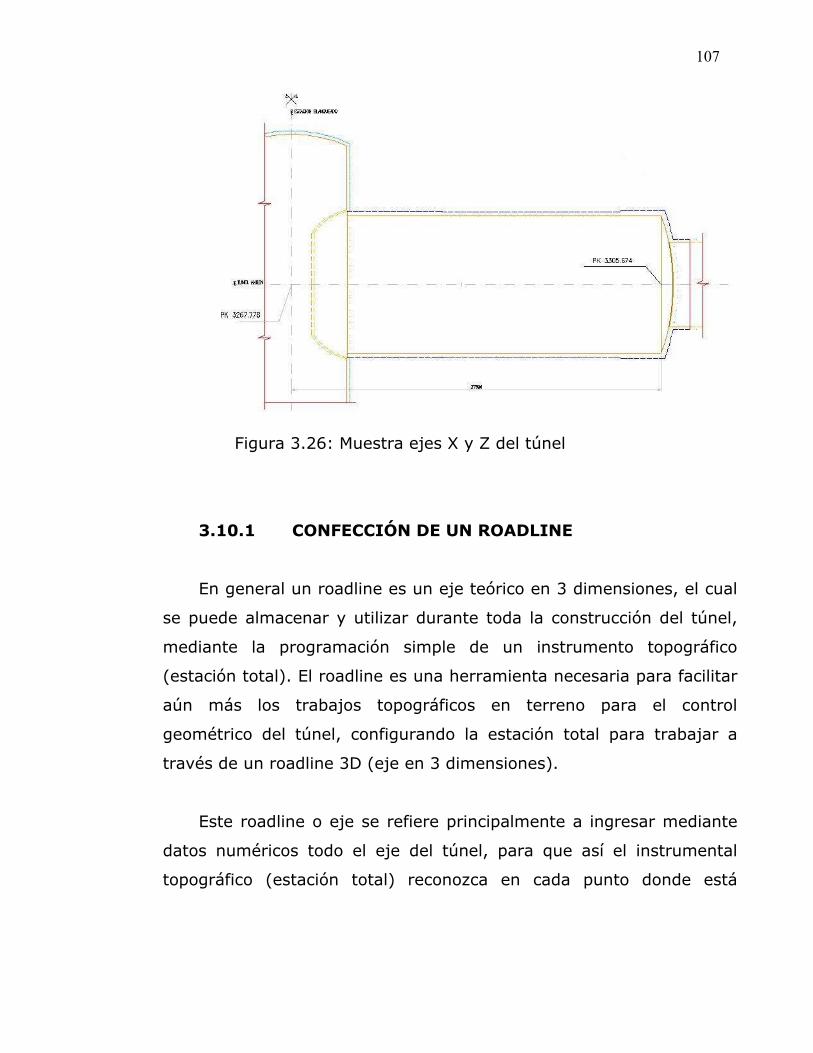
107
Figura 3.26: Muestra ejes X y Z del túnel
3.10.1 CONFECCIÓN DE UN ROADLINE
En general un roadline es un eje teórico en 3 dimensiones, el cual
se puede almacenar y utilizar durante toda la construcción del túnel,
mediante la programación simple de un instrumento topográfico
(estación total). El roadline es una herramienta necesaria para facilitar
aún más los trabajos topográficos en terreno para el control
geométrico del túnel, configurando la estación total para trabajar a
través de un roadline 3D (eje en 3 dimensiones).
Este roadline o eje se refiere principalmente a ingresar mediante
datos numéricos todo el eje del túnel, para que así el instrumental
topográfico (estación total) reconozca en cada punto donde está

108
situado, y así poder replantear puntos y realizar diversas labores
topográficas en relación al eje ya mencionado.
El roadline 3D se refiere a un eje en 3 dimensiones, por lo cual es
un eje planimétrico y altimétrico a la vez, con lo cual se crea un
modelo tridimensional del eje, por lo que ésta herramienta se adapta
perfectamente para las necesidades de replanteo y control geométrico
dentro del túnel.
Es necesario usar un equipo topográfico el cual se adapte a las
necesidades, por lo que es necesario que éste, dentro de sus
programas traiga la opción de ingresar un roadline. El instrumental
que se ajusta a las necesidades y que en definitiva fue utilizado es la
Estación Total marca Trimble modelo 3605, la cual, entre otras
facilidades para el uso en terreno posee dentro sus software el
programa nº 39, que permite ingresar a su memoria interna un
roadline 3D. Este programa incluye rutinas para almacenamiento,
replanteo, verificación, puntos de referencia, entre otros. A
continuación se da un ejemplo de su uso mediante un eje en particular
y cuales son los parámetros que se deben ingresar.
3.10.2 METODOLOGÍA DE USO
Primero y extraída la información desde los planos se debe
ingresar a la memoria interna de la estación total los datos que
definen el eje. Este almacenamiento de datos debe ser en forma
separada, entre datos planimétricos y datos altimétricos.

109
3.10.3 EJE PLANIMÉTRICO
Para el almacenamiento planimétrico, se deben ingresar los
puntos que definen al eje en forma planimétrica. Este programa en
particular almacena en secciones, utilizando para esto las coordenadas
del punto inicial y final para un alineamiento recto. En caso de
alineamientos que existan curvas horizontales o clotoides es necesario
ingresar las coordenadas del punto inicial, además del radio de la
curva (curva circular), o el parámetro A en el caso de la clotoide. Para
terminar se debe ingresar las coordenadas del punto final. El eje del
trazado que se ingresa debe comenzar y terminar en un elemento
recto. A continuación se muestra a modo de ejemplo el
comportamiento del programa mediante secciones.
Figura 3.27: Muestra secciones con rectas, clotoides y curvas
circulares

110
Donde S = Sección
S1: Coordenada X, Coordenada Y (recta)
S2: Coordenada X, Coordenada Y, parámetro A (clotoide)
S3: Coordenada X, Coordenada Y, radio (curva circular)
S4: Coordenada X, Coordenada Y, parámetro A (clotoide)
S5: Coordenada X, Coordenada Y (recta)
Se necesitan además los siguientes datos para describir los
diferentes elementos para el alineamiento horizontal del eje en el
programa.
Tabla 3.8: descripción de datos
Tipo Etiqueta Descripción
Recta 80 Sección o PK 37 Coordenada X 38 Coordenada Y
Curva 80 Sección o PK 37 Coordenada X 38 Coordenada Y 64 Radio, izquierda=- derecha=+
Clotoide 80 Sección o PK 37 Coordenada X 38 Coordenada Y 81 Parámetro A
A continuación se muestra un esquema de un sector del trazado
del eje, de un sector cercano a la Estación Lo Prado, el cual presenta
una clotoide y una curva circular. Mediante esto se ejemplifica la
creación de un roadline planimétrico.

111
Figura 3.28: Muestra un sector del trazado del eje
A grandes rasgos se puede describir que al ingresar en el
programa de la estación, éste nos pregunta si se trata del ingreso de
datos planimétricos o altimétricos. Luego de eso se crea un área, en la
cual se almacenan los datos planimétricos del eje. Esta área queda
guardada con extensión #1.
Como se puede apreciar en la Imagen 36, el primer tramo está en
recta, la cual comienza en el PK 3919,468 y finaliza en el PK
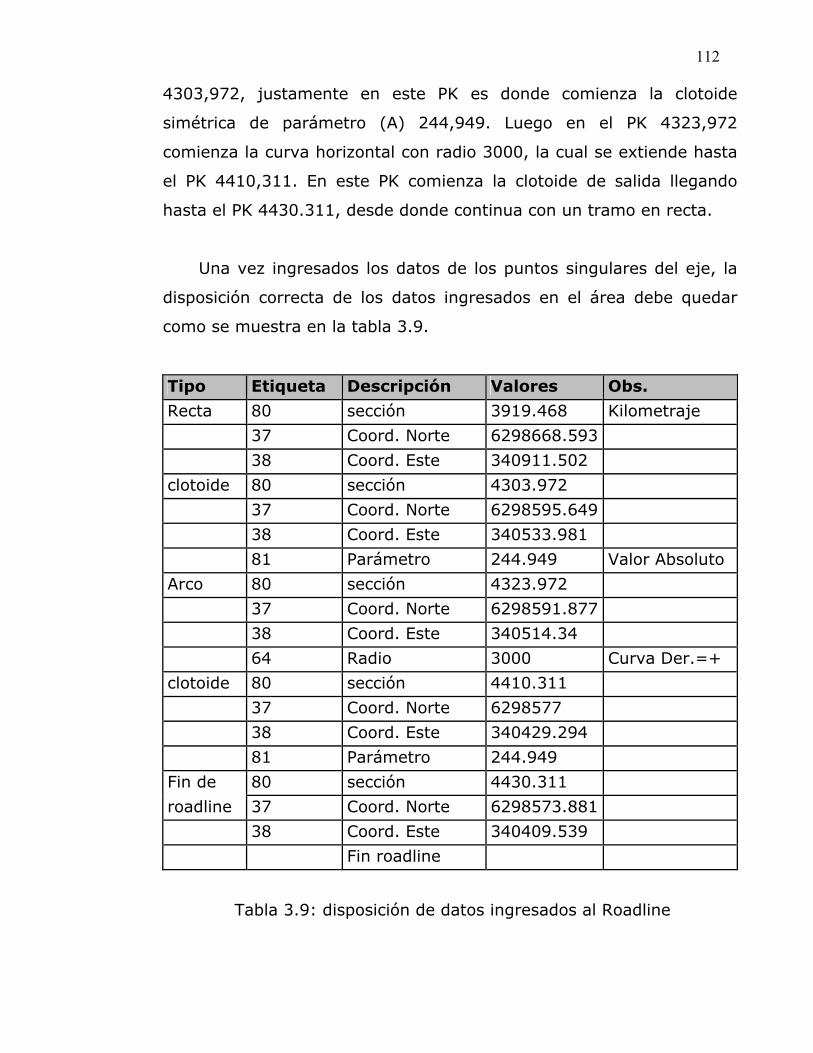
112
4303,972, justamente en este PK es donde comienza la clotoide
simétrica de parámetro (A) 244,949. Luego en el PK 4323,972
comienza la curva horizontal con radio 3000, la cual se extiende hasta
el PK 4410,311. En este PK comienza la clotoide de salida llegando
hasta el PK 4430.311, desde donde continua con un tramo en recta.
Una vez ingresados los datos de los puntos singulares del eje, la
disposición correcta de los datos ingresados en el área debe quedar
como se muestra en la tabla 3.9.
Tipo Etiqueta Descripción Valores Obs.
Recta 80 sección 3919.468 Kilometraje
37 Coord. Norte 6298668.593
38 Coord. Este 340911.502
clotoide 80 sección 4303.972
37 Coord. Norte 6298595.649
38 Coord. Este 340533.981
81 Parámetro 244.949 Valor Absoluto
Arco 80 sección 4323.972
37 Coord. Norte 6298591.877
38 Coord. Este 340514.34
64 Radio 3000 Curva Der.=+
clotoide 80 sección 4410.311
37 Coord. Norte 6298577
38 Coord. Este 340429.294
81 Parámetro 244.949
Fin de 80 sección 4430.311
roadline 37 Coord. Norte 6298573.881
38 Coord. Este 340409.539
Fin roadline
Tabla 3.9: disposición de datos ingresados al Roadline

113
3.10.4 EJE ALTIMÉTRICO
Para el almacenamiento altimétrico, se deben ingresar los puntos
que definen al eje en forma altimétrica. Es por esto que será necesario
entonces una descripción del alineamiento vertical en forma de datos
numéricos, al igual que en el caso del alineamiento planimétrico. Se
describe un perfil altimétrico definiendo los elementos de altura
mediante valores de sección consecutivos. Los elementos pueden ser
del tipo recta, arco (curva vertical) o parábola. A continuación se
muestra a modo de ejemplo el comportamiento del programa
mediante secciones.
Figura 3.29: Muestra secciones altimétricas de un eje
Donde:
S = Sección
H = Altura
R = Radio de un arco circular
C = Coeficiente para una parábola en la forma

114
Para definir un elemento de recta, solo se necesita la altura y la
sección en los puntos inicial y final. Un elemento circular o parabólico
requiere también una pendiente inicial. Esto significa que se debe
introducir una pendiente inicial si el tipo del elemento previo no es una
línea recta. Si se introduce el coeficiente para una parábola, el
programa calcula el coeficiente cuando esté en uso. Esto exige que
exista una pendiente tanto antes como después de este elemento
parabólico.
Se necesitan además los siguientes datos para describir los
diferentes elementos para el alineamiento vertical del eje en el
programa.
Tabla 3.10: descripción de datos
Tipo Etiqueta Descripción
Recta 80 Sección o PK
39 ELE, Z
Arco 80 Sección o PK
39 ELE, Z
44* Pendiente inicial
arriba=+ abajo=-
64 Radio arriba=+
abajo=-
Parábola 80 Sección o PK
39 ELE, Z
44* Pendiente inicial
arriba=+ abajo=-
84 Coeficiente
Fin 80 Sección o PK
39 ELE, Z
* No es obligatorio si el tipo del elemento previo es una línea recta

115
A continuación se muestra un esquema de un sector del trazado
del eje, de un sector cercano a la Estación Blanqueado, el cual
presenta una curva vertical. Mediante esto se ejemplifica la creación
de un roadline altimétrico.
Figura 3.30: Muestra un esquema de un sector del trazado
del eje
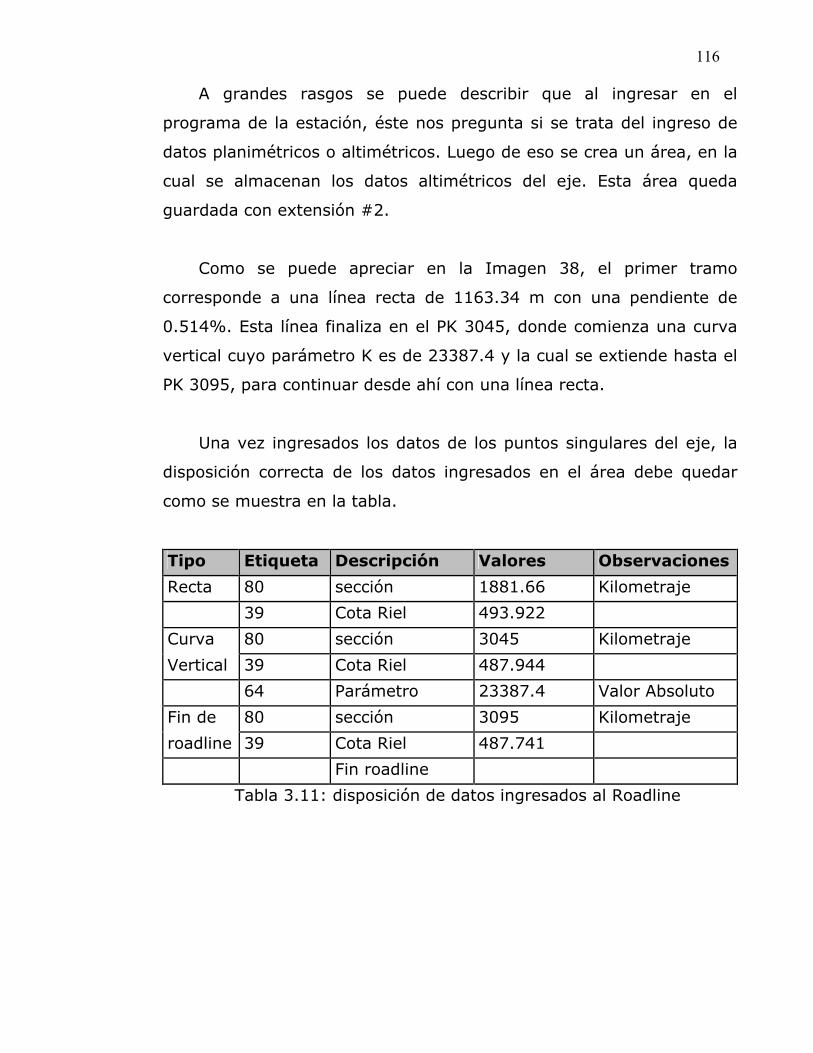
116
A grandes rasgos se puede describir que al ingresar en el
programa de la estación, éste nos pregunta si se trata del ingreso de
datos planimétricos o altimétricos. Luego de eso se crea un área, en la
cual se almacenan los datos altimétricos del eje. Esta área queda
guardada con extensión #2.
Como se puede apreciar en la Imagen 38, el primer tramo
corresponde a una línea recta de 1163.34 m con una pendiente de
0.514%. Esta línea finaliza en el PK 3045, donde comienza una curva
vertical cuyo parámetro K es de 23387.4 y la cual se extiende hasta el
PK 3095, para continuar desde ahí con una línea recta.
Una vez ingresados los datos de los puntos singulares del eje, la
disposición correcta de los datos ingresados en el área debe quedar
como se muestra en la tabla.
Tipo Etiqueta Descripción Valores Observaciones
Recta 80 sección 1881.66 Kilometraje
39 Cota Riel 493.922
Curva 80 sección 3045 Kilometraje
Vertical 39 Cota Riel 487.944
64 Parámetro 23387.4 Valor Absoluto
Fin de 80 sección 3095 Kilometraje
roadline 39 Cota Riel 487.741
Fin roadline
Tabla 3.11: disposición de datos ingresados al Roadline

117
3.10.5 GENERACIÓN DE RUTINAS PARA EL CONTROL
GEOMÉTRICO DEL TÚNEL
Como ya se ha dicho anteriormente es de mucha importancia
llevar el control geométrico del túnel constantemente. Como se vió
anteriormente se genera mediante los programas internos de la
estación total un modelo tridimensional del eje del túnel.
Como el sistema constructivo NATM considera el diseño
geométrico de los túneles mediante variados radios dentro de una
misma sección, es necesario confeccionar programas los cuales
consideren todos estos distintos cambios en el radio de la sección del
túnel. Considerando que en terreno se leen directamente los tres ejes
(Z, X e Y), que en la práctica corresponden a la cota de riel, distancia
al eje y kilometraje, es con estos datos con los cuales se deben
confeccionar rutinas especialmente para calculadoras programables
usadas comúnmente en terreno.
El programa creado es para replantear rápida y fácilmente el
galibo de la sección curva en la que se esté trabajando, ya sea ésta el
galibo de excavación o el galibo teórico para la postura de marcos.

118
Figura 3.31: Muestra los vértices de los distintos radios de la
sección del túnel
Como se muestra en la figura 39 se puede apreciar que la sección
típica de un túnel interestación presenta distintos radios, los cuales
dependen de la posición de vértices M (M1, M2, M3, etc.). La idea
principal de la generación del programa es que éste trabaje con un
galibo teórico cero, el cual corresponda al nivel del Shotcrete
terminado. Se puede observar de la figura que la excavación es de 30
cm, por lo que el galibo o el delta de excavación correspondería a -
0.30m si se asume el delta 0.0m en el nivel terminado de llenado.
Mediante este raciocinio de expansión del galibo se genera una rutina
119
simple dependiendo de los distintos radios y de la ubicación de un
punto x en el espacio (punto que se está midiendo en terreno).
De la figura se puede concluir que los distintos radios van
seccionando la figura, dependiendo de la altura en que el cambio de
radio se produzca. La posición del punto leído en terreno está dado
mediante la distancia al eje, la cota de riel y el kilometraje en que se
encuentre. Finalmente el programa que se genera dependerá del radio
y la altura en que se encuentre la sección (teóricos) y la posición del
punto en terreno de la (distancia al eje y cota de riel) aplicando para
esto teorema de Pitágoras quedando de la siguiente manera. (La
rutina debe discriminar según la altura en que esté el punto leído, el
radio teórico que le corresponda).
Donde:
R : Radio de la sección
DE : Distancia al Eje
CR : Cota de Riel
∆MX : Diferencia en X del punto M al inicio
∆MY : Diferencia en Y del punto M al inicio
Una vez ingresado este programa en las calculadoras
programables, e ingresado el roadline 3D en los instrumentos
topográficos, el trabajo topográfico en terreno se facilita enormemente
gracias a la automatización de la topografía clásica.

120
Como se había mencionado anteriormente existen dos instancias
claves en las que se debe controlar geométricamente mediante
topografía las actividades de construcción del túnel. Estas
corresponden al chequeo de excavaciones y nivelación de marcos
reticulados. En estas actividades los profesionales encargados de la
topografía deben guiar a los trabajadores para la correcta colocación
de marcos y el chequeo de excavación, todo esto para evitar
desviaciones en los ejes y lograr así un encuentro de túneles dentro de
las precisiones del proyecto. Para el replanteo de las excavaciones se
considera principalmente el galibo o delta de excavación, el cual
involucra la distancia al eje y la cota respecto al riel. En el replanteo de
marcos se considera además del gálibo, el kilometraje exacto donde
debe quedar posicionado el marco.
3.10.6 PROCEDIMIENTO DEL CONTROL GEOMÉTRICO DE
EXCAVACIONES Y MARCOS
Para el Control Geométrico de las excavaciones e instalación de
marcos reticulados que se realizan para el avance del túnel, existe un
procedimiento en particular que se utiliza en esta faena, la cual
consiste en lo siguiente.
Primero el profesional encargado de la topografía debe instalarse
con la Estación Total en un punto, el cual pueda visualizar en su
totalidad la excavación, además de visualizar con claridad los puntos
de amarre. Estos puntos de amarre se encuentran materializados
mediante clavos Hilti en los muros del túnel y claramente identificados
con su nombre. Los puntos, los cuales están ingresados en la memoria
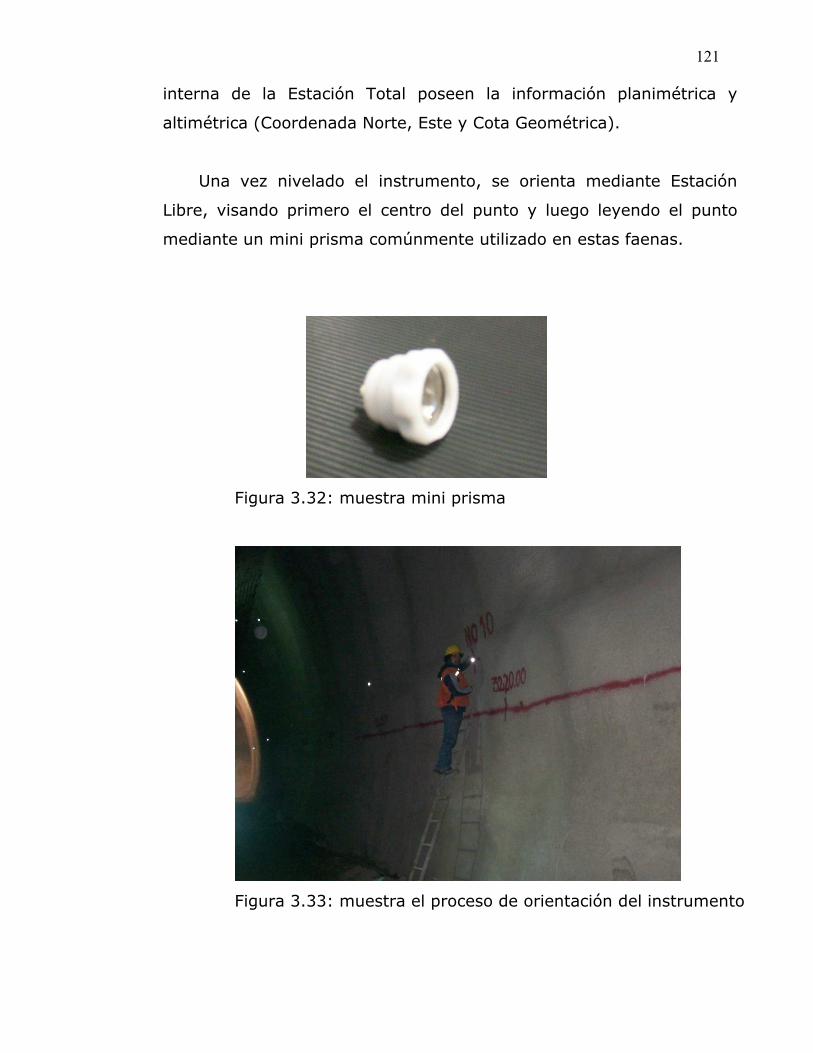
121
interna de la Estación Total poseen la información planimétrica y
altimétrica (Coordenada Norte, Este y Cota Geométrica).
Una vez nivelado el instrumento, se orienta mediante Estación
Libre, visando primero el centro del punto y luego leyendo el punto
mediante un mini prisma comúnmente utilizado en estas faenas.
Figura 3.32: muestra mini prisma
Figura 3.33: muestra el proceso de orientación del instrumento
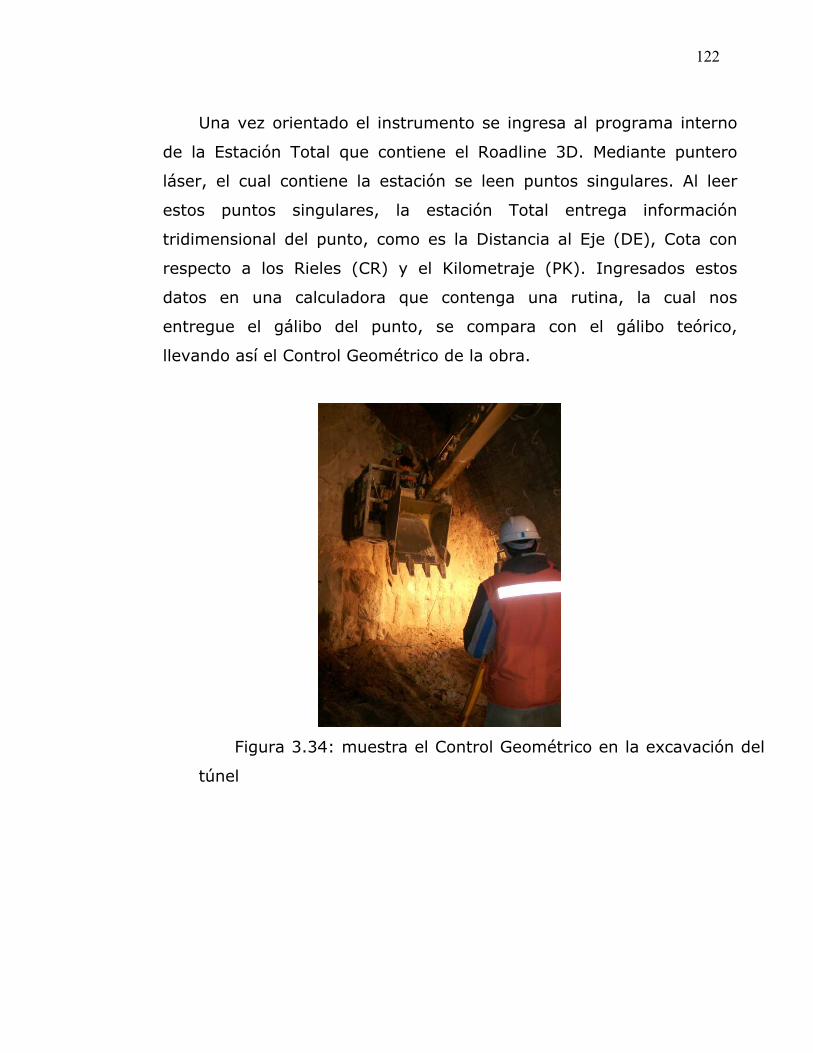
122
Una vez orientado el instrumento se ingresa al programa interno
de la Estación Total que contiene el Roadline 3D. Mediante puntero
láser, el cual contiene la estación se leen puntos singulares. Al leer
estos puntos singulares, la estación Total entrega información
tridimensional del punto, como es la Distancia al Eje (DE), Cota con
respecto a los Rieles (CR) y el Kilometraje (PK). Ingresados estos
datos en una calculadora que contenga una rutina, la cual nos
entregue el gálibo del punto, se compara con el gálibo teórico,
llevando así el Control Geométrico de la obra.
Figura 3.34: muestra el Control Geométrico en la excavación del
túnel

123
Figura 3.35: muestra el Control Geométrico en la instalación de
marcos reticulados

124
CAPÍTULO IV: ANALISIS DE RESULTADOS
4.1 ANALISIS DE PRECISION DISTANCIAS PTL
Una de las principales características de la proyección PTL, y una
de las premisas más importantes para su utilización, es la mínima
deformación que ésta entrega con respecto a los datos de terreno.
Tal como se puede observar en la Tabla donde se compararon las
distancias de terreno con las distancias obtenidas en la proyección
PTL, encontrándose precisiones entre 1:70.000 a 1:160.000. La
precisión planimétrica para el proyecto es de 1:40000, por lo tanto
todas las distancias entre los puntos base están holgadamente dentro
de la tolerancia exigida.
Tabla 4.1: Comparación distancias terreno y PTL
BASE DISTANCIA PTL
(m) DISTANCIA
TERRENO (m) PRECISION M017-M018 1060,473 1060,483 1:100000 M019-M020 988,713 988,699 1:70000 M021-M022 960,173 960,179 1:160000 M023-M024 1112,910 1112,921 1:100000 M025-M026 1017,224 1017,215 1:99000 M027-M028 906,064 906,069 1:150000 M029-M030 791,190 791,197 1:120000

125
Esto se puede visualizar en las coordenadas de los puntos, donde
la diferencia mayor es de 0.011m en la coordenada Norte y 0.010m en
la coordenada Este.
Tabla 4.2: Diferencia de coordenadas en proceso de validación
COORDENADAS METRO
COORDENADAS VALIDADAS
DIFERENCIA (m)
PTO NORTE ESTE NORTE ESTE NORTE ESTE M015 6290807,185 336964,117 6290807,185 336964,117 0,000 0,000 M016 6291740,265 336954,741 6291740,265 336954,741 0,000 0,000 M017 6292743,986 336921,869 6292743,981 336921,866 0,005 0,003 M018 6293681,051 337418,368 6293681,054 337418,372 0,003 0,004 M019 6294639,051 337653,716 6294639,058 337653,708 0,007 0,008 M020 6295623,859 337741,505 6295623,851 337741,509 0,008 0,004 M021 6296536,383 337868,807 6296536,387 337868,817 0,004 0,010 M022 6297473,951 338075,927 6297473,962 338075,931 0,011 0,004 M023 6297356,609 338582,121 6297356,603 338582,116 0,006 0,005 M024 6298453,271 338392,643 6298453,277 338392,647 0,006 0,004 M025 6298465,417 339614,848 6298465,422 339614,852 0,005 0,004 M026 6298609,791 340621,774 6298609,787 340621,771 0,004 0,003 M027 6298896,670 341631,789 6298896,673 341631,787 0,003 0,002 M028 6299033,952 342527,392 6299033,948 342527,397 0,004 0,005 M029 6299142,912 343255,936 6299142,910 343255,933 0,002 0,003 M030 6298951,772 344023,691 6298951,776 344023,696 0,004 0,005
4.2 TOLERANCIA CIERRE ANGULAR
Para la poligonal donde la tolerancia angular es de 10 segundos
√N, se obtuvo un error de cierre de 12 segundos centesimales
mientras que la tolerancia con respecto al número de vértices que la
contienen es de 34 segundos centesimales.

126
4.3 PROCEDIMIENTOS EMPLEADOS
El procedimiento empleado para el transporte de coordenadas
tanto dentro como fuera de los túneles, es un proceso relativamente
lento, ya que lo que se busca es avanzar con la mayor precisión que
este método permite. Además la constante revisión de las coordenadas
que se materializan en las paredes del túnel mediante clavos hilti, es
un proceso de suma importancia para evitar desviaciones y así poder
conseguir encuentros de túneles que satisfagan las precisiones del
proyecto.
En cuanto al procedimiento empleado para el control geométrico,
en general, tanto en el chequeo de las excavaciones del túnel, como
en la postura de marcos reticulados, es un proceso que se hace
relativamente sencillo y expedito, debido a que se emplean distintos
métodos para agilizar el proceso, como por ejemplo el método de
estación libre para orientar el instrumento, la utilización de programas
internos en las estaciones totales y rutinas en calculadoras
programables, entregando resultados satisfactorios en el correcto
avance de los túneles.
El aporte del Ingeniero Geomensor en todo el proceso de
construcción de los túneles, es de máxima importancia, ya que es el
profesional del cual depende, en resumidas cuentas, a que los túneles
queden correctamente construidos según el proyecto. Esto se debe a
que es un profesional que está desde el estudio del proyecto hasta el
final de éste. Además el trabajo que realiza el Ingeniero Geomensor es
completo ya que debe supervisar las obras tanto en gabinete como en
terreno.

127
CAPÍTULO V: CONCLUSIONES
Según el conjunto de observaciones angulares y de distancias se
puede concluir que responden satisfactoriamente a la tolerancia
propuesta para el proyecto en cuestión, donde estas diferencias
pueden afectar el desarrollo de los túneles.
La alta tolerancia impuesta para este proyecto (Orden Primario) se
debe a la existencia de túneles, los cuales deben ser replanteados y
constantemente controlados geométricamente con gran precisión, ya
que debido al sistema constructivo dispuesto para este tipo de obras,
los túneles al encontrarse deben tener diferencias mínimas.
El conjunto de los procedimientos empleados y explicados en esta
memoria cumplen a cabalidad su función, llegando a una meta común
óptima, la cual es el encuentro de los túneles dentro de las
precisiones adoptadas en elproyecto.
Finalmente, con respecto a la hipótesis propuesta, se puede
concluir que habiéndose cumplido con las tolerancias y por ende con
las precisiones, se comprueba que la aplicación de un Sistema
Topográfico Local PTL, reduce satisfactoriamente las diferencias de
distancia y por ende se cuenta con un sistema de transporte de
coordenadas de control de alta precisión para el replanteo de los
túneles.

128
Personalmente, al haber participado y desarrollado este trabajo,
concluyo que las herramientas que entrega la Universidad son más
que suficientes para enfrentar de gran manera el dinámico mundo
laboral y ser así profesionales de excelencia, pudiendo enfrentar
cualquier desafío y abarcando en su totalidad el gran campo
ocupacional de la Ingeniería en Geomensura.

129
BIBLIOGRAFIA
• Ministerio de Obras Publicas, “Manual de Carreteras Vol. 2
(Dic. 2001)
• Sergio Andrade, “Procedimiento de Fortificación de Túneles”
(2007)
• Cesar Romero; Pero Ypnowfky, “Construcción de Pique,
Galeria y Estocada” (2007)
• René Zepeda G., “Apunte Curso Geodesia Geometrica”
(2004)
• www.metrosantiago.cl


















