Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry...

of 14
Transcript of Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry...
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
1/14
Symmetry embedding in the reconstruction ofmacromolecular assemblies via the discrete Radon transform
Salvatore Lanzavecchia,a Francesca Cantele,a Michael Radermacher,b
and Pier Luigi Bellona,*
a Dipartimento di Chimica Strutturale, Universitaa degli Studi, via Venezian 21, 20133 Milan, Italyb Max Planck Institut fuur Biophysik, Abt. Strukturbiologie, Heinrich-Hoffmann-Strasse 7, 60528 Frankfurt, Germany
Received 29 August 2001; and in revised form 16 February 2002
Abstract
In this paper we discuss the embedding of symmetry information in an algorithm for three-dimensional reconstruction, which is
based on the discrete Radon transform. The original algorithm was designed for randomly oriented and in principal asymmetric
particles. The expanded version presented here covers all symmetry point groups which can be exhibited by macromolecular protein
assemblies. The orientations of all symmetry equivalent projections, based on the orientation of an experimental projection, are
obtained using global group operators. Further, an improved interpolation scheme for the recovery of the three-dimensional discrete
Radon transform has been designed for greater computational efficiency. The algorithm has been tested on phantom structures as
well as on real data, a virus structure possessing icosahedral symmetry. 2002 Elsevier Science (USA). All rights reserved.
Keywords: Symmetry (of protein assemblies); Point groups (of protein assemblies); Radon transform; Three-dimensional reconstruction; Virus
reconstruction
1. Introduction
We have recently described a fast and accurate al-
gorithm for reconstructing macromolecular protein as-
semblies from projections with random orientations
extracted from electron micrographs (Lanzavecchia
et al., 1999). The algorithm is based on the calculation of
a discrete approximation to three-dimensional Radon
transform (RT; Radon, 1917) starting from discrete
approximations of the two-dimensional RT of projec-tions. The three-dimensional discrete Radon transform
(DRT) thus obtained is used in an inversion process to
compute a three-dimensional representation of the ob-
ject which, in electron microscopy, is an electron-density
map.
Before we introduce the subject of this paper, it isworth quoting Deans (Deans, 1993) on the possibility
of identifying a function f and its RT ff with physical
quantities: Since ff is identified with a measured
quantity, it only represents an approximation. Even
worse, since the probe must be applied a finite number
of times, ff is not even approximated in a continuous
function. Consequently, any determination of f is, at
best, only an approximation to the desired distribution
and at worst bears no resemblance to the desired dis-
tributions.. . .Keep in mind that many difficulties are
associated with reconstruction problems simply be-
cause the function ff is not known exactly. This
statement makes us aware of two difficulties. Since frepresents a two-dimensional image or a three-dimen-
sional density distribution to be represented in Carte-
sian arrays, difficulties arise from the need of sampling
a physical quantity in polar or spherical spaces. For
this reason, one or more interpolation stages are nee-
ded to recover a discrete Radon transform. Theproblem becomes more serious in three-dimensional
electron microscopy when experimental data are rep-
resented by projections with random orientations (see,
e.g., Crowther et al., 1970a). Approximations to f,
however, are accurate enough to allow physicians to
base their diagnoses upon CT or NMR images as well
Journal of Structural Biology 137 (2002) 259272
www.academicpress.com
Journal of
StructuralBiology
* Corresponding author. Fax: +39-02-5031-4454.
E-mail address: [email protected] (P. Luigi Bellon).
1047-8477/02/$ - see front matter 2002 Elsevier Science (USA). All rights reserved.
PI I : S 1 0 4 7 - 8 4 7 7 ( 0 2 ) 0 0 0 0 4 - 7
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
2/14
as astrophysicists, geologists, and structural biologists
to conduct their studies.
The reconstruction algorithm is based on the fact that
also for RTs there exists a central section theorem,
similar to the central section theorem of Fourier trans-
forms. The radial lines of the 2D RT (or sinogram) of a
projection represent radial lines in the three-dimensionalRT, although this is not generally true for DRT. If the
3D Radon space is represented in a system of three or-thogonal axes (p;/; h, see Eq. (1) later on), a sinogramdescribes a plane parallel wave whose equation is de-
termined by the projecting direction. In the discrete
domain, it is the difference of the sampling grids in two
and three dimensions which makes it necessary to use an
interpolation to fill the three-dimensional DRT array.
Different versions of the algorithm have been developed.
Two versions for the recovery of DRT, described pre-
viously, were based either on a nearest neighbor inter-
polation and averaging or on a more elaboratedinterpolation scheme where the radial lines in the three-
dimensional DRT were obtained as linear combinations
of a neighborhood of sinogram lines weighted by their
angular distances from the radial line in DRT. In the
inversion step, from the DRT to real space, also two
variations have been implemented, one of which uses a
weighted back projection (Gilbert, 1972; Radermacher,
1997) and the other a direct Fourier method (DFM;
Lanzavecchia and Bellon, 1998). From the total of four
combinations only three have been used up to now:
combined with the finer interpolation scheme both in-
version methods and combined with the nearest neigh-
bor interpolation only the weighted backprojection
inversion.The algorithms can exploit the properties of the DRT
to reject non tomographic noise (NTN, Lanzavecchia
and Bellon, 1996 ) in a process which fills all radial lines
of the transform array in the cases where experimental
data are not enough. If the DRT is stored in a 3D array
representing a sampling in p;/; h coordinates, thevalues in each plane of the array must fulfil certain
constraints due to the continuity of the transform
(Lanzavecchia et al., 1999). If the DRT array is obtained
from a set of experimental projections, the constraints
often are not satisfied, mostly because of noise. The filterimposes consistency on the transform by suppressing the
part of noise which is not consistent with a tomographic
experiment. Additional inconsistencies may arise if data
are missing. The filter can also be used to fill an in-
complete array by enforcing consistency (Lanzavecchia
and Bellon, 1996). Combined with a replacement of
experimental data and used iteratively this is a special
case of the projection onto convex set algorithm
(POCS; Carazo, 1992; Carazo and Carracosa, 1987;
Sezan, 1982).
Very often macromolecular protein assemblies are
symmetric and, as a consequence, one projection can be
observed along a number of different directions or, in
other words, is representative of a symmetry-related
series of projections. Usage of the symmetry increases
the number of projections available for the reconstruc-
tion. We have implemented the symmetry operations as
part of the reconstruction algorithm and modified the
interpolation scheme for higher computational effi-ciency. The accuracy of the new algorithms has been
tested with phantom data and their performance hasbeen tested on an icosahedral structure reconstructed
from real data.
2. Symmetry of macromolecular protein assemblies
Protein molecules are characterized by inherent
handedness. If they assemble together to form a crystal
or an isolated assembly the resulting entity maintains
this chiral property. For this reason we will only ob-serve symmetry groups in which there are no mirror
planes, inversion centers, or improper axes (two-step
operations: rotation around an axis followed by re-
flection through an orthogonal plane) which would
reverse the handedness of the protein structure. There
exist 230 possible space groups. Discarding those con-
taining centers, mirror planes, or improper axes one
can easily isolate a subset of only 65 groups repre-
senting all possible ways in which protein molecules
can crystallize. In isolated assemblies, whose symmetry
is described by means of point groups, only axial
symmetry can be observed, with axes of various orders.
Based on physical reasons, an axis of symmetry cannot
pass through the protein electron density. This state-ment, perhaps obvious, can be demonstrated as fol-
lows. Suppose that a symmetry axis passes through an
atom inside a protein, then this atom will be repro-
duced n times, n being the axis order. Yet also its
neighbor atoms will be reproduced n times; that is, all
atoms of the protein chain would be reproduced sym-
metrically around that axis n times. This would cause
interpenetration of n density distributions in a short
range of distances around the atom hit by the axis. The
same reasoning holds true for an axis intersecting or
passing near a chemical bond. Thus, an axis through athree-dimensional electron density indicates either close
contact between equivalent molecules or reconstruction
artifacts.
Point groups are abstract entities which can be
dressed by an equivalent moiety (an isolated molecule
or a molecular assembly), regularly repeated a number
of times equal to the group order. Here is a short list, in
Schoonflies notation, of point groups which can be ob-
served in isolated protein assemblies (for Schoonflies
symbols and a thorough description of point group
theory, see Cotton, 1964, and Hahn, 1992). The sym-
metries of some simulated macromolecular assemblies,
260 S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
3/14
used in our tests, are shown in Fig. 1. The phantoms are
composed of one or several copies of an asymmetric
random knot (Bellon et al., 1998), whose number
depends upon the group order.
a. The C1 or identity group characterizes individual
proteins or macromolecular assemblies with no sym-
metry at all, as is the case, for example, for the ribo-
some;
b. The Cn or cyclic groups possess only one symmetry
axis of order n. In this case, n equivalent protein moi-eties assemble together around the axis. In principle, n
can assume any value and the moieties are reproduced
around the axis with constant angular separation equal
to 2p=n;c. The Dn or dihedral groups contain a Cn plus C2
axes orthogonal to it. One can imagine obtaining an
assembly with this kind of symmetry by first obtaining n
molecules around the main Cn axis and by rotating the
result by p (the C2 operation) around an axis orthogonal
to Cn. Thus, an assembly possessing Dn symmetry will
contain 2n equivalent moieties (note that because of the
Cn axes, the C2 is replicated too).
d. The T subgroup of the tetrahedral Td group
possesses symmetry operators which are easily visual-
ized in a cube inscribing the tetrahedron; in this con-
struction, the edges of the tetrahedron lie along the
diagonals of the cube faces. The T group has four
threefold axes C3 oriented as the main or body di-agonals of the cube, plus twofold axes orthogonal to
the cube faces. A single molecule is reproduced three
times by a C3 around a vertex of the tetrahedron and
any two C2 axes (orthogonal to the cube face) oper-ating in sequence will dress the remaining vertices. A T
assembly will contain therefore 3 2 2 12 equiva-lent moieties;
e. The O subgroup of the cubic or octahedral Ohgroup (h stays for holohedral, Oh comprising a center
and mirror planes) possesses a set of four C3 axes
coming out of the cube vertices plus three C4 axes or-
thogonal to the cube faces and six C2 axes cutting op-
posite pairs of edges. A set of three moieties obtained
around a C3 axis can be reproduced by a C4 axis to dress
four vertices of a cube face and finally reproduced on the
parallel face by a p rotation orthogonal to the C4 axis
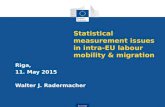
Fig. 1. Stereo views of phantom structures exhibiting different symmetries. Each structure is obtained by replicating a random knot with all symmetry
operators of a group. The number of knots in each structure is equal to the group order. (a) A completely asymmetric structure belonging to C1
group of order 1; (b, c) two structures with C7 and D7 symmetry (group orders 7 and 14, respectively); (d, e, f) structures belonging with T, O, and Isubgroups (group orders 12, 24, and 60, respectively).
S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272 261
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
4/14
used previously. The subgroup generates therefore
3 4 2 24 equivalent moieties;f. The I subgroup of the icosahedral group Ih, pos-
sesses 6 C5 axes (half the number of icosahedron verti-
ces, 12), plus 10 C3 axes (half the number of faces, 20)
and, finally, 15 C2 axes (half the number of edges, 30).
The symmetry of the icosahedron is such that the 20faces can be grouped in 5 subsets of 4, each of which lies
on the faces of an inscribing tetrahedron. Furthermore,15 C2 axes can be grouped in 5 groups of 3 orthogonal
axes. The latter property offers a convenient way to
represent an icosahedral structure. A moiety is repro-
duced three times by a C3 operation to dress an icosa-
hedral face and this set is copied by a C2 on another face
sharing an edge with the first one. The set of 6 moieties is
then duplicated by another C2 axis orthogonal to the
first one and, finally, the 12 moieties are replicated five
times by a C5. The order of I subgroup is therefore
3 2 2 5 60.Point groups can be regarded as collections of sym-metry elements as well as of operators. Since we are
restricted to collections of symmetry axes, the corre-
sponding operators merely consist of rotation matrices
and their products. As is true for matrix products, the
operations of symmetry elements do not commute: point
groups are not Abelian with the exception of cyclic
groups Cn.
As stated above, the presence of symmetry aids the
reconstruction of a macromolecular protein assembly
from its projections. For a given projection, n 1 equalprojections exist, n being the group order, unless the
projecting direction is a special one. These projections
cross the original one along n 1 common lines. Inicosahedral structures n 60, symmetry-generatedprojections cross a given one along 59 common lines
whose positions can be used to determine the Euler
angles of the projecting direction (see, e.g., Fuller et al.,
1996).
3. Symmetry embedding in the reconstruction algorithm
A reconstruction program is fed with a set of pro-
jections assigned with known projecting directions. Thelatter are determined with respect to a defined orienta-
tion of the molecule in a reference system. A projecting
direction is specified by two Euler angles a and b (a
longitude and b latitude) which define the projection
axis orientation in spherical coordinates. The third Euler
angle c describes a rotation of the structure around that
axis. From the Euler angles a compound rotation ma-
trix, R ZaYbZc, can be computed (Z and Ybeing counterclockwise rotation matrices around z andy, respectively, whose angular arguments are in paren-
theses). It is conversely easy to go back from R to the
Euler angles. The matrix R can be used to rotate a three
dimensional density map in such a way that the pro-
jection labeled by the three Euler angles can be obtained
by projecting the density along z.
Symmetry is imposed to the reconstruction by using
the same projection labeled with different triads a;b; c.Each triad represents one of the equivalent projecting
directions dictated by the point group. Given an Eulertriad, all symmetry equivalent triads are found by ap-
plying the group operators to R. To do this we havedevised global operators G, different for each group.
A global operator is a matrix which varies according to
the values of one or more indices (see Appendix A). Fig.
2a shows a C3 phantom structure for which a given
projection (Fig. 2b) is identical to two others. The ori-
entations of the latter are easily determined by the glo-
bal group operator once the orientation of the first
projection is known. In this way, the 2D FT of the
projection fits three central sections of the three-di-
mensional FT (Fig. 2d). Correspondingly, the sinogramof Fig. 2c) fits three times in the RT (Fig. 2e).
The orientation of the symmetry axes with respect to
the reference system is arbitrary. It is convenient, how-
ever, to choose it in such a way that the rotation ma-
trices are evaluated in the simplest way. This can be
achieved by letting one or more symmetry axes of the
molecular assembly coincide with the orthogonal axes of
the reference system. In other words, the structure
should be oriented in a canonical way, specific for
each symmetry group. Thus, the principal axes of Cnstructures are conveniently oriented along z. The same is
true for Dn
structures, in which a twofold axis, orthog-
onal to the principal one, is set along x. A preliminary
model with Cn or Dn symmetry, oriented at random, iseasily brought to its canonical orientation. For a dis-
tributions possessing symmetries, a nondegenerated axis
of inertia is oriented along the principal symmetry axis
which can be brought into coincidence with one coor-
dinate axis. A simple and essentially automatic algo-
rithm to achieve this has been recently described
(Lanzavecchia et al., 2001). A canonical orientation can
be unambiguously defined also for completely asym-
metric structures (group C1) because, in this case, there
are three nondegenerated axes of the inertial ellipsoid.
For density distributions belonging to the T, O, and Isymmetry groups, the ellipsoid is a sphere so that the
inertial approach becomes nonsensical. In these cases,
canonical orientations are defined in a conventional
way. Once this has been chosen, as described in Fig. 3, a
preliminary model can be brought to the appropriate
orientation by trial and error methods (see Frank, 1996,
and references therein). In the canonical orientation of
the T group, the twofold axes are set along the coordi-
nate axes and the threefold axes lie along the diagonals
of alternate octants (Fig. 3a). The same is true for the O
group, once the fourfold axes are set along the coordi-
nate axes (Fig. 3b). In the icosahedral subgroup I,
262 S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
5/14
different choices are possible. The one usually adopted
(Klug and Finch, 1968) is that shown in Fig. 3c, in
which 3 (out of 15) C2 axes are oriented along x;y; and z.The two opposite edges cut by z are set parallel to x
so that along the arc y! z C5 is encountered first,followed by C3. The angular distance of C5 from z is
arctan(s) and that of C3 is arctan(2 s), s being thegolden ratio
s
1
ffiffiffi5
p
=2
1:61803 . . .
as shown in
Appendix B.
4. Short overview of two methods of building a discrete
Radon array
For a three-dimensional function fx the continuousRT ff is defined as
ffp; f Z
fxdp f xdx; 1
where f represents a unit vector in R3. If f is described
by two angles h and / (the latitude and longitude) the
function ff is represented in the coordinates p; h;/; pbeing the radial coordinate along the direction specified
by h and /. A discrete version of ff ~ff DRT isobtained by evaluating numerical values of the trans-
form at equispaced intervals Dp;Dh, and D/ along p; h,and / : ~ffi;j; k ffiDp;jDh; kD/ ffpi; hj;/k. Thissampling is clearly not evenly spaced according to Eu-
clidean metric. However, the factors limiting the quality
of an approximation of ff by ~ff are the same which limitthe reliability of a discrete Fourier transform of a finite
object, since Radon and Fourier transforms are inti-
mately related (Bracewall, 1956). The Shannon theorem
(Shannon, 1949) and the sampling theory are applicable
in Fourier space since an invertible transformation exists
between the sampling set and a set of points evenly
spaced in the Euclidean space (Clark et al., 1985).
The sampled version of the continuous sinogramSp; d of a projection with Euler angles a;b; c can becomputed at discrete points to yield a 2D array Spi; dn.Each continuous line of the sinogram Sd
p
Sp; d constant corresponds to a line of the continuous
Fig. 2. Filling DRT in the presence of symmetry. A projection of the C3 phantom in a is shown in b. The 2D Fourier transforms of it and of two equal
projections generated by symmetry are central sections of the structure 3D Fourier transform, as shown in d. Correspondingly, the sinogram of the
projection in c fits three times the RT as shown in e.
S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272 263
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
6/14
three-dimensional RT ffdp ffp; h0d;/0d; h0d and /0dbeing constant values depending upon d. This corre-
spondence is illustrated in Fig. 2. In the discrete version,~SSi; n Spi; dn, the radial sampling pi over p is thesame for the lines of ~SS and ~ff but the values h0n;/
0n (de-
termined by the parameters a;b; c; and dn) do not gen-erally coincide with any value of the sampling grid of ~ff,
i.e., with the points hj;/k.The two methods described earlier (Lanzavecchia
et al., 1999) use different strategies to fill the array~ffi;j; k with the values of the lines Sn Spi; dn.
Method 1 scans all projections one at a time and de-
termines, for each line Sn, the values h0n;/
0n. The sino-
gram line is added into the array ~ffi;j; k in the positioncorresponding to h0j;/
0k which differ from h
0n;/
0n less than
half the angular sampling interval of ~ff. At the end, each
line of ~ff is normalized by the number of sinogram lines
received. Method 2 scans over the three-dimensional
array ~ffi;j; k ffpi; hj;/k line by line along hj, and/k. For a given line l, the set of all projections is ex-
amined to retrieve all sinogram lines Sn closest to l. The
angular distance of each sinogram line to l is calculated
and is used to compute a weight which in turn is used to
multiply the values ofSn before adding them to the line l.
In the final step, the contribution received by each 3D
radial line is normalized by the sum of the weights of
each contribution. The computational cost of the pro-
cess grows linearly with the number of projections.
The two methods are illustrated in Fig. 4. As can be
seen, the main difference is in the number of lines of ~ff
which are filled, which is remarkably different near the
pole. In this zone, the absolute angular separationamong a number of lines hj;/k, equally spaced in j andk, is actually small. Thus, according to method 1, a lineSn contributes only to one line of ~ff, while with method 2
the same line contributes to several lines in ~ff. This has a
consequence on the inversion stage of the three-dimen-
sional DRT.
The DRT is inverted by either an r-weighted back-projection algorithm applied twice, once to the slices of
the DRT with constant h and subsequently to sections
spanned by h;p of the partially inverted DRT. A sec-ond inversion algorithm uses a direct Fourier method
(Bellon and Lanzavecchia, 1997; Lanzavecchia and
Fig. 3. Canonical orientations of T, O, and I subgroups with respect to Cartesian axes.
264 S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
7/14
Bellon, 1998) which takes advantage of an interpolation
based upon the moving window Shannon reconstruction
(Lanzavecchia and Bellon, 1995) applied in the Fourier
domain (Lanzavecchia and Bellon, 1997). Complete ar-
rays can be inverted by a fast DFM (Lanzavecchia and
Bellon, 1998), while the arrays with gaps must be in-
verted by backprojection or filtered in a POCS proce-
dure based on NTN rejection to fill the voids before
DFM inversion. Both approaches are robust also if the
angular distribution of projections is uneven, a situationthat is often found when molecules are reconstructed
from projections with random orientations.
5. Symmetry effects and protocol improvements
In the presence of symmetry, the data of the sino-
grams, computed once, are inserted in DRT several
times, using different triads of Euler angles corre-
sponding to all equivalent viewing directions, as shown
in Fig. 2. A time-consuming step is the computing of the
relationship between the lines of the sinograms and
DRT lines, a problem requiring a large number of
trigonometric functions to be evaluated for each equiv-
alent projection. Among the two algorithms described
above, the interpolation method 1 is very fast and is
most suitable when a large number of projections is
available, as is the case for structures possessing high
symmetry orders such as icosahedral viruses. Interpo-lation method 2, although more precise, has the disad-
vantage of an extra computational cost to evaluateabsolute angular distances, which increases as symmetry
increases. To achieve higher efficiency, we have
developed method 2b, a different implementation of
method 2.
Method 2b consists of scanning all projections, much
the same way as the first method does, and of computing
the values h0n;/0n corresponding to each sinogram line Sn.
The latter still contributes with weights based upon the
absolute angular separation to closer lines hj;/k but a
lookup table is used to alleviate the computation cost.The way a sinogram line spreads its contribution varies
depending on the value of h0n;/0n, but it repeats identi-
cally if /0n is incremented by D 2p=m; D being thesampling distance of ff along /. Thus, a slice of a sphere,
spanning 0 p along h and 0 2p=m along /, isenough to build a table. The slice is previously sampled
at a given rate t, say t 2p=10m, and for every pointht;/t the angular distances from all neighboring hj;/klines are computed and stored in the table together with
weighting coefficients. As can be seen in Fig. 4, the
number of lines hj;/k nearby line ht;/t depends on ht.Thus, for each h
t;/
t, the table contains a variable
number of lines hj;/k. In the program, for each lineh0n;/
0n, the value of /
0n is truncated to 0 2p=m to
compute the closest ht;/t. The table is then addressed toobtain the full list of Radon lines hj;/k on which thecontribution of the sinogram line is to be spread with the
tabulated weight. Thus, in method 2b the transform is
filled in much the same way as in method 2, apart from
small approximations introduced by finite sampling of
the slice of the sphere. The loss of numerical accuracy is
barely perceivable, as can be seen by comparing the
discrepancies data for methods 2 and 2b in Table 1.
There is, however, a consistent gain in efficiency.
6. Tests with icosahedral structures
The performance tests reported here have the purpose
of comparing times and accuracy of the methods de-
scribed above. We cannot obviously make comparisons
with other methods of reconstruction since this would
essentially depend upon different software implementa-
tions and different operating systems. The three imple-
mentations of our algorithm (methods 1, 2, and 2b) have
been evaluated using icosahedral virus structures, which
belong to the symmetry subgroup I of order 60. The
Fig. 4. Two interpolation strategies used in the buildup of the DRT are
illustrated by means of a unit sphere spanned by angles /0; 2p andh0; p; bold circle is the equator h p=2. The radial lines of thediscrete transform correspond to points where meridians cross paral-
lels. From the point of view of interpolation, the slices defined by two
adjacent meridians are equivalent. Starlets represent the positions of
discrete sinogram lines with angles / and h. In method 1 (left side)
sinogram lines are accumulated on the nearest DRT lines marked by a
dot. At right, sinogram lines spread their contributions, with appro-
priate weight, all over the lines of DRT (marked by a dot) which are
confined within a circle (method 2). The dots falling within a circle
have an absolute angular distance from a sinogram line less than the
sampling step at the equator. Note that number of DRT lines to which
a given sinogram line contributes is larger near the pole than near theequator.
S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272 265
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
8/14
tests have been performed with phantom data, such as
shown in Fig. 5, and with experimental images of po-
liovirus (Belnap et al., 2000).
6.1. Phantom tests
An analytical phantom structure has been generatedin a cube of 1283 voxels (Fig. 5a) and 50 projections
(Fig. 5b) have been obtained with random Euler angles
by analytic rotation of the model (no interpolation). A
second set of projections (Fig. 5c) was obtained by
corrupting the first set with noise, at a signal to noise
ratio S=N 1. The noise pattern was obtained fromstructure-free areas of micrographs of ice-embedded
samples. The phantom has been reconstructed from
both sets in four different ways: (a) method 1 for re-
covering DRT combined with the two-step back pro-
jection inversion (Radermacher, 1997); (b) method 1
combined with filtering to fill the gaps in the DRT and
DFM inversion; (c, d) method 2 and 2b, combined with
DFM inversion. The performances have been evaluated
using the discrepancy measure, the normalized root-
mean-square deviation with respect to the original
(Herman et al., 1973). The reconstruction from noisydata has been computed with and without the applica-
tion of a low-pass filter. Execution times and discrep-
ancies are reported in Table 1. The times, reported for a
personal computer (Pentium II, 450 Mhz) under Linux
operating system, refer to the entire process of recon-
struction starting from the projections. Therefore I/O
operations as well as the computation of sinograms and
of two dimensional Fourier transforms are included.The phantoms reconstructed with the different methods
from noisy projections look visually the same. One re-
construction is shown in Fig. 5d.
6.2. Tests on poliovirus
A set of 123 images of poliovirus (Belnap et al., 2000)
has been kindly provided by David Belnap of National
Institutes of Health (NIH), see Fig. 6a. The projections
were already aligned and the Euler angles known. The
original images, digitized in 109
109 pixels, were
padded to 128 128 pixels and a volume of 1283 voxels
was reconstructed using different protocols: (a) Method
1 to recover the Radon transform followed by the two-
step backprojection inversion; (b) method 1 with DFM
inversion which requires filtering to fill the gaps in the
transform; (c, d) methods 2 and 2b with DFM inversion.
Images of the reconstructed structures are shown in
Figs. 6b and c; computation times are quoted in Table 2.The structures reconstructed by different methods
were visually indistinguishable. Estimates of their reso-
lutions have been obtained by dividing the projections
of poliovirus into two subsets which were reconstructed
with each method and calculating the Fourier shell
correlations (FSC; Saxton and Baumeister, 1982; van
Heel et al., 1982). In all cases the FSC crossed level 0.5
at a frequency (23/128) pixels1 [maximum observablefrequency (63/128) pixels1] in agreement with theresolution obtained at NIH (Belnap et al., 2000).
7. Discussion
If the symmetry of a particle is known, the recon-
struction algorithms described above can take advan-
tage of it to make optimum use of all the informationavailable. We implemented the complete set of symme-
try operations that apply to isolated symmetrical parti-
cles. The usage of symmetry in the reconstruction
algorithm virtually increases the number of projections
the algorithm must handle. This requires an efficient
implementation, yet without loss of accuracy. All the
algorithms tested perform with comparable accuracy, as
shown in Table 1. In reconstructing the icosahedralphantom of Fig. 5a from noise-free projections, method
1 used in combination with weighted backprojection and
no NTN filtration shows the largest discrepancy. For
the same interpolation method, yet combined with NTN
filtration, and for interpolation methods 2 and 2b the
discrepancy figures, however, are almost equal when the
phantom is reconstructed from noise-free projections
and DFM inversion. In the presence of noise and if no
low-pass filter is applied, method 1 used with backpro-
jection inversion yields the smallest discrepancy. All
discrepancies are comparable when the reconstructed
structure is low-pass filtered to 2/3 of the Nyquist
Table 1
Computation times and error estimates are reported for the phantom structure shown in Fig. 5, reconstructed from a set of 50 projections both noise-
free and corrupted with noise (S=N 1)Method Total time
in seconds
Discrepancy,
noise-free projection
Discrepancy,
S=N 1, no low passDiscrepancy,
S=N 1, low pass1, BP inversion 380 0.105 0.169 0.166
1, plus POCS and DFM inversion 82 0.050 0.231 0.2052, DFM inversion 250 0.049 0.181 0.162
2b, DFM inversion 63 0.052 0.178 0.163
Note. Four implementations of the protocol have been considered. The low-pass filter used for discrepancies reported in the last column has been
set to 2/3 the Nyquist frequency.
266 S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
9/14
frequency. A comparison of the discrepancies quoted in
the last two rows of Table 1 shows that the use of tab-
ulated weights in method 2b does not cause any signif-
icant loss of accuracy in comparison with method 2.
The main advantage of the algorithm with either in-
terpolation method is in the speed of the Radon ap-
proach. The different speeds are illustrated in Table 2.
Filtration and inversion of the three-dimensional DRT
depend only on the size of the volume but are inde-
pendent of the number of projections, whereas the in-
terpolation as part of the calculation of the DRT from
the projections grows linearly with the number of images
used. The new interpolation scheme based on a lookup
table, as illustrated above, is faster by about a factor of
56 as compared to the original interpolation scheme of
method 2, without significant loss of accuracy. As
Fig. 5. A simulated structure with I symmetry and its reconstruction. (a) The original phantom; (b) some analytical projections of the phantom;(c) same as in b, corrupted with noise digitized from feature-free areas of micrographs of ice embedded samples S=N 1; (d) reconstruction ofthe phantom shown in a, as obtained from 50 noisy projections of the type shown in c. The final models obtained with the different methods listed
in Table 1 are visually indistinguishable.
S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272 267
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
10/14
expected, the fastest method is based on the nearest
neighbor interpolation combined with DFM inversion.
Yet, to achieve the same accuracy, this method requires
the application of the NTN filter when the number of
projections is low.
The inversion algorithms require that the DRT is
being sampled in a polar coordinate system with equalangular increment. Equal angular sampling creates a
sampling grid with points that are not equidistant in
space. The distance between sampling points is smaller
near the poles of the polar coordinate system and larger
near the equator. This sampling causes an uneven dis-
tribution in the signal to noise ratio in the DRT that is
recovered from the projections. This is most obvious for
the nearest neighbor interpolation (method 1), where
fewer measurements contribute to one line in the DRTwhen the line is located near the pole. Because the re-
covery of the DRT is an averaging process and fewer
Table 2
Total computation times (in seconds) required by four different implementations of the reconstruction protocol in the case of 123 projections of
poliovirus sizing 128 128 pixels eachMethod Computing DRT Filtering Inversion Total
1, BP inversion 56 360 416
1, DFM inversion 56 39 23 108
2, DFM inversion 598 23 621
2b, DFM inversion 103 23 126
Note. The times are comprehensive of I/O operations as well as of sinogram and two-dimensional FT computations.
Fig. 6. Some experimental projections of poliovirus, reproduced with permission of D. Belnap and of the National Institutes of Health, are shown in
a. Two views of the reconstruction, down the threefold and the fivefold axis, are shown in b and c, respectively. The virus has been reconstructed with
the algorithms reported in Table 2, from a set of 123 images with assigned projection angles and translation shifts.
268 S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
11/14
measurements are averaged near the poles the signal to
noise ratio is lower near the poles. For the more elab-
orate interpolation schemes this effect is smaller, and the
NTN filter reduces it further. The situation however
becomes more complicated to analyze. Recovering thediscrete Radon transform on an evenly sampled grid
an algorithm which we developed for other purposes
(Radermacher, unpublished)would require a second
interpolation before the inversion methods could be
applied.
Based on what has been demonstrated for nonuni-
formly sampled functions (Clark et al., 1985) one would
not expect any additional anisotropy effects to arise
from the use of spherical coordinates. We analyzed the
possible anisotropy, a different behavior of the recon-
struction algorithm along different directions, using the
icosahedral phantom shown in Fig. 5. In an icosahedral
structure three equivalent twofold axes are orthogonal
and oriented along the Cartesian axes of the recon-
struction so that what is seen along the z axis can be
compared to what is seen along x and y. Thus thestructure can be rotated into three equivalent orienta-
tions and compared. The rotation requires just a per-
mutation of the array indexes. Using the phantom of
Fig. 5, we evaluated the discrepancies between arrays
reconstructed by the different methods and their ver-
sions with permuted axes. The phantom itself, due to
round off errors in its creation, is very slightly aniso-
tropic. The discrepancies among its versions with per-
muted axes are about 2 105. The phantomreconstructions performed by the different methods,
with and without noise, show small discrepancies be-
tween the versions with permuted axes (Table 3). In theabsence of noise the discrepancies are very low, espe-
cially for DFM methods. In the presence of noise the
discrepancy increases for all methods with the exception
of backprojection; however, the use of NTN filter, which
imposes consistency to DRT, reduces the discrepancy to
values close to that of a reconstruction from noise-free
projections.
Because no interpolation is needed to rotate the
structure into the three equivalent orientations, the
data in Table 3 describe solely the effect of anisotropy
caused by the reconstruction algorithm. The values
(with two exception) are less than half the discrepancy
values in the comparison of the reconstruction algo-
rithm to the model structure (Table 1). As expected the
discrepancies are higher when the nearest neighbor
interpolation scheme is used without NTN filtrationthan when finer interpolations are employed. Visually,
however, this anisotropy could not be observed. In Fig.
7 we show enlarged details of the reconstruction of
poliovirus along the three twofold axes aligned withx;y, and z. As can be seen, no appreciable differencescan be noted, and this is true for all reconstruction
methods used here.
Table 3
Evaluation of the anisotropy for the reconstruction arrays of the phantom of Fig. 5
Method Discrepancy, noise-free projection Discrepancy, S=N 1, low passWithout NTN With use of NTN Without NTN With use of NTN
1, BP inversion 0.055 0.057
1, plus POCS and DFM inversion 0.021 0.014 0.167 0.046
2, DFM inversion 0.007 0.006 0.063 0.0132b, DFM inversion 0.009 0.007 0.064 0.018
Note. The discrepancy is reported between each reconstruction array and its copy with permuted indices. For DFM methods, each reconstruction
has been obtained with and without use of the NTN filter.
Fig. 7. No anisotropy effects can be noted if poliovirus is reconstructed by the DRT approach. In a, b, and c are three partial rendering (from plane
No. 15 to No. 32, total No. of planes 128) along x, y, and z, respectively. The details, along three equivalent twofold axes, are perfectly equivalent.
S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272 269
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
12/14
8. Conclusions
We have included into our previous reconstruction
algorithms a complete set of symmetry operations that
now can be easily used for all types of single particles,
starting with no symmetry and extending to the group of
icosahedral symmetry. The algorithms perform accu-rately and are computationally efficient. Reconstructing
isolated macromolecular assemblies from projections viathe Radon transform method with either implementa-
tion presented here is a robust and attractive alternative
to conventional backprojection methods, from both
speed and accuracy points of view. Most electron mi-
croscopy studies on icosahedral virus structures are
carried out by the Fourier-Bessel method (FBM,) with
use of cylindrical coordinates. Even in this case inter-
polation is a critical point (Crowther et al., 1970b). The
result obtained by DRT methods for icosahedral struc-
tures is perfectly comparable with that obtained withFBM (D. Belnap, private communication).
At the end, we would like to note one important as-
pect of three-dimensional reconstruction of single par-
ticles. Even though all biochemical data might predict a
structure to be symmetric, it is possible that the specimen
on the grid is not. Asymmetries can be introduced by
improper refolding of expressed proteins, or by damage
to the structure in any step of the purification and
specimen preparation. Other asymmetries, inherent to
the molecule, may be due to conformational differences
between subunits in a multisubunit complex, depending
on their functional state. Therefore, even though the new
algorithm makes it easy to enforce symmetry, symmetry
must not be enforced if it is not present in the imagedsample. Only when the sample has been shown to posses
symmetry (e.g., Kocsis et al., 1995) should this symmetry
be enforced by the algorithm.
Acknowledgments
This work was supported by Italian Ministry of
University and Research (COFIN 2000 and FIRST
2001) and by Grant NSF DBI 95 155 18. The authors
thank David Belnap and the National Institutes of
Health for making available projection maps of polio-
virus used in experimental tests and for continued in-
terest in this work.
Appendix A. Global operators
Global operators transform an orientation matrix R,
obtained from a triad of Euler angles, into all symmetry
equivalent matrices Rn; n being the group order. Allmatrices mentioned below represent counterclockwise
rotations.
Notation used
X and Z are rotation matrices around the x and z axis,
respectively. In parentheses are the angular arguments of
rotation which are either a constant angle or the product
of it with an integer
i;j; k; l
. P and Q are product
matrices used to align along z threefold and fivefoldaxes, respectively; once the latter have performed their
rotations, the original orientations are restored.G is the global group operator, a matrix whose co-
efficients are determined by the values of integer indices.
Angular symbols
a tan11 ffiffiffi
5p
=2 tan1sb tan12 s (see Appendix B for a and b)c tan1
ffiffiffi2
p
dn 2p=n; n being the axis order
Global group operators
Cn group. To obtain n symmetry equivalent orienta-
tions, the global operator is simply:
Gi Zidn; with i 0 n 1identity is obtained for i 0:Dn group. To obtain 2n symmetry equivalent orien-
tations, the n-fold axis operates first with the matrix:
Zidn; with i 0 n 1
identity is obtained for i
0:
The twofold axis operates next to obtain 2n orienta-
tions:
Xjd2; with j 0; 1 identity is obtained for j 0:The global group operator is
Gj;i Xjjd2Zidnidentity is obtained for j and i 0:T subgroup. To obtain 3 2 2 12 equivalent
orientations, the threefold axis is first aligned along z to
operate and finally brought to its original orientation:
Pid3 Zp=4TXcTZid3XcZp=4;with i 0; 1; 2 identity is obtained for i 0:The twofold axes, operating next, are
Zjd2 and Xkd2; with j and k 0; 1identity is obtained for j or k 0:The global group operator is
Gk;j;i Xkd2Zjd2Pid3identity is obtained for k and j and i 0:O subgroup. To obtain 3
4
2
24 equivalent
orientations, the threefold axis is first oriented along z to
270 S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
13/14
operate and once the rotation has been performed, its
original orientation is restored by the matrix:
Pid3 Zp=4TXcTZid3XcZp=4;with i 0; 1; 2 identity is obtained for i 0:The fourfold axis coincident with z and operating
next, is:
Zjd4; with j 0 3identity is obtained for j 0:Finally, a twofold axis coincident with x operates:
Xkd2; with k 0; 1 identity is obtained for k 0:The global group operator is
Gk;j;i Xkd2Zjd4Pid3identity is obtained if k and j and i 0:I subgroup. To obtain 3
2
2
5
60 equivalent
orientations, the threefold axis is first oriented along z torotate and once this operation has been performed, its
original orientation is restored by the matrix:
Pid3 XbTZid3Xb; with i 0; 1; 2identity is obtained for i 0:A twofold axis coincident with z operates next:
Zjd2; with j 0; 1 identity is obtained for j 0:Another twofold axis, coincident with x, is applied
further:
X
kd2
; with k
0; 1
identity is obtained for k
0
:
Finally, the fivefold axis is first oriented along z to
operate and finally brought to the original orientation
by the matrix:
Qld5 XaTZld5Xa; with l 0 5identity is obtained if l 0:The global group operator is therefore
Gl;k;j;i Qld5Xkd2Zjd2Pid3identity is obtained if l and k and j and i 0:Note that global operators, products of several ma-
trices with the exception of Cn group, perform a singleoperation (a rotation about a n-fold axis) provided that
all but one of the matrices with variable arguments are
set to identity.
Appendix B. Integer powers of the golden ratio s and two
relevant icosahedral angles
Integer powers of s ffiffiffi
5p 1=2 1:6180 . . . are
obtained by the recurrence formula sn sn1 sn2(Wells, 1986). Starting from s0 and s1, we can obtain
s2 s 1; s3 2s 1; s1 s 1; s2 2 s.
If three golden rectangles (whose edge lengths are in
the golden ratio) mutually intersect in perpendicular
planes as shown in Fig. A.1, their 12 vertices describe
an icosahedron (Coxeter, 1989). A threefold axis, or-
thogonal to x and pointing from the origin to the
center of the triangle 1-2-3, can be aligned along z by
a counterclockwise rotation around x. This center is
identified by a vector w3 equal to 1/3 the sum of
vectors pointing from the origin to the vertices 1, 2,and 3:
w3 1=31; 0; s 1; 0; s 0; s; 1 1=30; s; 2s 1 0; 1=3s; 1=3s3:The counterclockwise rotation angle to orient the
threefold axis along z is therefore
b arctans=s3 arctans2 arctan2 s 20:905:The vector 0; s; 1, pointing from the origin to vertex
3, identifies the orientation of a fivefold axis. This axiscan be oriented along z by a counterclockwise rotation
around x. The rotation angle is
a arctans 58:282:
References
Bellon, P.L., Lanzavecchia, S., 1997. Fast direct Fourier methods,
based on 1- and 2-pass coordinates transformation, yields accurate
reconstructions of X-ray CT clinical images. Phys. Med. Biol. 42,
443463.
Bellon, P.L., Lanzavecchia, S., Scatturin, V., 1998. A two exposures
technique of electron tomography from projections with random
Fig. A.1. Three mutually perpendicular and intersecting golden rect-
angles (e.g., edge lengths 1 and s) describe an icosahedron. Points 1, 2,and 3 define a face whose center is intersected by a threefold axis. A
fivefold axis goes from the origin to point 3.
S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272 271
-
8/3/2019 Salvatore Lanzavecchia, Francesca Cantele, Michael Radermacher and Pier Luigi Bellon- Symmetry embedding in th
14/14
orientations and a quasi-Boolean angular reconstitution. Ultrami-
croscopy 72, 177186.
Belnap, D.M., McDermott Jr., B.M., Filman, D.J., Cheng, N., Trus,
B.L., Zuccola, H.J., Racaniello, V.R., Hogle, J.M., Steven, A.C.,
2000. Three-dimensional structure of poliovirus receptor bound to
poliovirus. Proc. Natl. Acad. Sci. USA 97, 7378.
Bracewall, R.N., 1956. Strip integration in radio astronomy. Aust. J.
Phys. 9, 198217.Carazo, J.M., 1992. The fidelity of 3D reconstructions from incomplete
data and the use of restoration methods. In: Frank, J. (Ed.),
Electron Tomography. Plenum, New York, pp. 117166.
Carazo, J.M., Carracosa, J.L., 1987. Information recovery in missing
angular data cases: an approach by the convex projections method
in three dimensions. J. Microsc. 45, 2343.
Clark, J.J., Palmer, M.R., Lawrence, P.D., 1985. A transformation
method for reconstruction of functions from non-uniformly spaced
samples. IEEE Trans. Acoust. Speech Signal Process. 33, 1151
1165.
Cotton, F.A., 1964. Chemical Applications of Group Theory. Wiley,
New York.
Coxeter, H.S.M., 1989. In: Introduction to Geometry. Wiley, New
York, p. 162.
Crowther, R.A., Amos, L.A., Finch, J.T., De Rosier, D.J., Klug, A.,1970a. Three-dimensional reconstruction of spherical viruses by
Fourier synthesis from electron micrographs. Nature 226, 421
425.
Crowther, R.A., De Rosier, D.J., Klug, A., 1970b. The reconstruction
of a three-dimensional structure from projections and its applica-
tion to electron microscopy. Proc. Roy. Soc. Lond. A 317, 319340.
Deans, S.R., 1993. The Radon Transform and Some of its Applica-
tions. Wiley, New York (original work published 1983).
Frank, J., 1996. Three-Dimensional Electron Microscopy of Macro-
molecular Assemblies. Academic Press, San Diego.
Fuller, S.D., Butcher, S.J., Cheng, R.H., Baker, T.S., 1996. Three-
dimensional reconstruction of icosahedral particlesthe uncom-
mon line. J. Struct. Biol. 116, 4855.
Gilbert, P.F., 1972. The reconstruction of a three-dimensional struc-
ture from projections and its application to electron microscopy. II.
Direct methods. Proc. Roy. Soc. Lond. B 182, 89102.
Hahn, T. (Ed.), 1992. Space-Group Symmetry. International Tables
for Crystallography, vol. A. Kluwer Academic, Dordrecht.
Herman, G.T., Lent, A., Rowland, S.W., 1973. ART: Mathematics
and applications (a report on the mathematical foundations and on
the applicability to real data of the algebraic reconstruction
techniques). J. Theor. Biol. 42, 132.
Klug, A., Finch, J.T., 1968. Structure of viruses of the papilloma-
polyoma type. IV. Analysis of tilting experiments in the electron
microscope. J. Mol. Biol. 31, 112.
Kocsis, E., Cerritelli, M.E., Trys, B.L., Cheng, N., Steven, A.C., 1995.
Improved methods for determination of rotational symmetries in
macromolecules. Ultramicroscopy 60, 219228.
Lanzavecchia, S., Bellon, P.L., 1995. A bevy of novel interpolating
kernel for the Shannon reconstruction of high band pass images. J.Visual Commun. Image Repres. 6, 122131.
Lanzavecchia, S., Bellon, P.L., 1996. Electron tomography in conical
tilt geometry. The accuracy of a direct Fourier method (DFM) and
the suppression of non-tomographic noise. Ultramicroscopy 63,
247261.
Lanzavecchia, S., Bellon, P.L., 1997. The moving window Shannon
reconstruction in direct and Fourier domain: application in
tomography. Scanning Microsc. Suppl. 11, 153168.
Lanzavecchia, S., Bellon, P.L., 1998. Fast computation of 3D Radon
transform via a direct Fourier method. Bioinformatics 14, 212216.
Lanzavecchia, S., Bellon, P.L., Radermacher, M., 1999. Fast and
accurate three-dimensional reconstruction from projections with
random orientations via Radon transforms. J. Struct. Biol. 128,
152164.
Lanzavecchia, S., Cantele, F., Bellon, P.L., 2001. Alignment of 3Dstructures of macromolecular assemblies. Bioinformatics 17, 5862.
Radermacher, M., 1997. Radon transform techniques for alignment
and 3D reconstruction from random projections. Scanning Mi-
crosc. Intl. Suppl. 11, 169176.
Radon, J., 1917. UUber die Bestimmung von Funktionen durch ihre
Integralwerte laangs gewisser Mannigfaltigkeiten. Ber. Verh. Koonig
Saachs. Ges. Wiss. Leipzig, Math. Phys. 69, 262267.
Saxton, W.O., Baumeister, W., 1982. The correlation averaging of a
regularly arranged bacterial cell envelope protein. J. Microsc. 127,
127138.
Sezan, M.S.H., 1982. Image restoration by the method of convex
projections. II. Applications and numerical results. IEEE Trans.
Med. Imag. MI-1, 95101.
Shannon, C.E., 1949. Communication in the presence of noise. Proc.
IRE 37, 1021.
van Heel, M., Keegstra, W., Schutter, W., van Bruggen, E.J.F., 1982.
Arthropod hemocyanin structures studied by image analysis. In:
Leeds, W.E.J. (Ed.), Life Chemistry Reports (Suppl. 1). The
Structure and Function of Invertebrate Respiratory Proteins,
EMBO Workshop, pp. 6973.
Wells, D., 1986. In: The Penguin Dictionary of Curious and
Interesting Numbers. Penguin, Middlesex, England, pp. 3649.
272 S. Lanzavecchia et al. / Journal of Structural Biology 137 (2002) 259272