Safe Execution of Bipedal Walking Tasks from Biomechanical Principles
72
Safe Execution of Bipedal Walking Tasks from Biomechanical Principles Andreas Hofmann and Brian Williams
-
Upload
tamara-robles -
Category
Documents
-
view
29 -
download
0
description
Safe Execution of Bipedal Walking Tasks from Biomechanical Principles. Andreas Hofmann and Brian Williams. Introduction. Introduction. Problem: For agile, underactuated systems, can’t ignore dynamics. Introduction. Problem: For agile, underactuated systems, can’t ignore dynamics. - PowerPoint PPT Presentation
Transcript of Safe Execution of Bipedal Walking Tasks from Biomechanical Principles

Safe Execution of Bipedal Walking Tasks from
Biomechanical Principles
Andreas Hofmann and Brian Williams
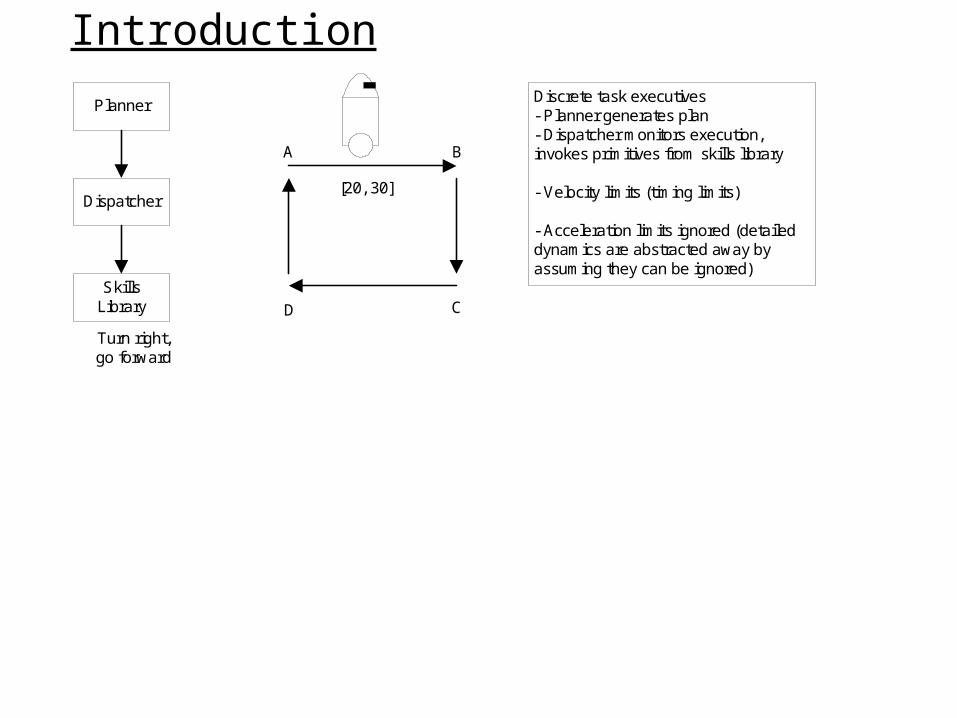
Introduction
Planner
Dispatcher
SkillsLibrary
A B
CD
[20, 30]
Turn right,go forward
Discrete task executives- Planner generates plan- Dispatcher monitors execution,invokes primitives from skills library
- Velocity limits (timing limits)
- Acceleration limits ignored (detaileddynamics are abstracted away byassuming they can be ignored)
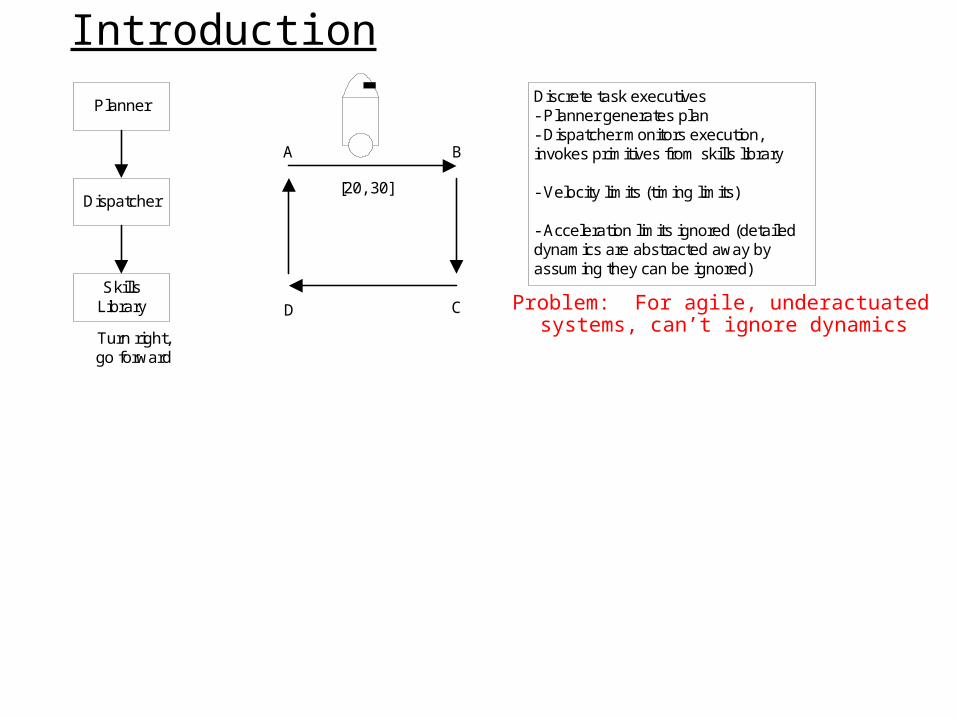
Introduction
Problem: For agile, underactuated systems, can’t ignore dynamics
Planner
Dispatcher
SkillsLibrary
A B
CD
[20, 30]
Turn right,go forward
Discrete task executives- Planner generates plan- Dispatcher monitors execution,invokes primitives from skills library
- Velocity limits (timing limits)
- Acceleration limits ignored (detaileddynamics are abstracted away byassuming they can be ignored)

Introduction
Problem: For agile, underactuated systems, can’t ignore dynamics
Planner
Dispatcher
SkillsLibrary
A B
CD
[20, 30]
Turn right,go forward
Discrete task executives- Planner generates plan- Dispatcher monitors execution,invokes primitives from skills library
- Velocity limits (timing limits)
- Acceleration limits ignored (detaileddynamics are abstracted away byassuming they can be ignored)
t
Left knee
t
Left hip pitch
- Detailed joint trajectories generatedoffline, taking into account dynamics- Trajectories tracked using simplehigh-impedance PD control laws

Introduction
Problem: For agile, underactuated systems, can’t ignore dynamics
Planner
Dispatcher
SkillsLibrary
A B
CD
[20, 30]
Turn right,go forward
Discrete task executives- Planner generates plan- Dispatcher monitors execution,invokes primitives from skills library
- Velocity limits (timing limits)
- Acceleration limits ignored (detaileddynamics are abstracted away byassuming they can be ignored)
t
Left knee
t
Left hip pitch
- Detailed joint trajectories generatedoffline, taking into account dynamics- Trajectories tracked using simplehigh-impedance PD control laws
Problem: No notion of task plan, little flexibility to disturbances

Introduction – Problem AddressedPlanner
Dispatcher
SkillsLibrary
A B
CD
[20, 30]
Turn right,go forward
Discrete task executives- Planner generates plan- Dispatcher monitors execution,invokes primitives from skills library
- Velocity limits (timing limits)
- Acceleration limits ignored (detaileddynamics are abstracted away byassuming they can be ignored)
t
Left knee
t
Left hip pitch
- Detailed joint trajectories generatedoffline, taking into account dynamics- Trajectories tracked using simplehigh-impedance PD control laws
Gap: Large class of problems that require- ability to execute task-level plans- ability to deal with disturbances- taking into account dynamic limitations;
understanding relationship between acceleration limits, and time needed to achieve state-space goals
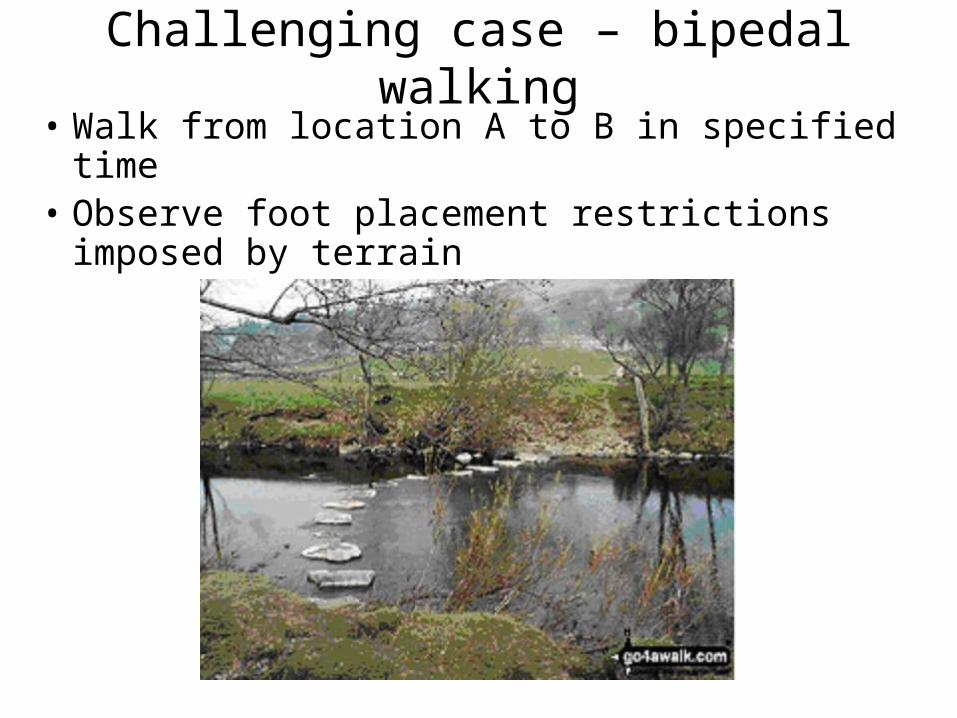
Challenging case – bipedal walking
• Walk from location A to B in specified time• Observe foot placement restrictions imposed by
terrain
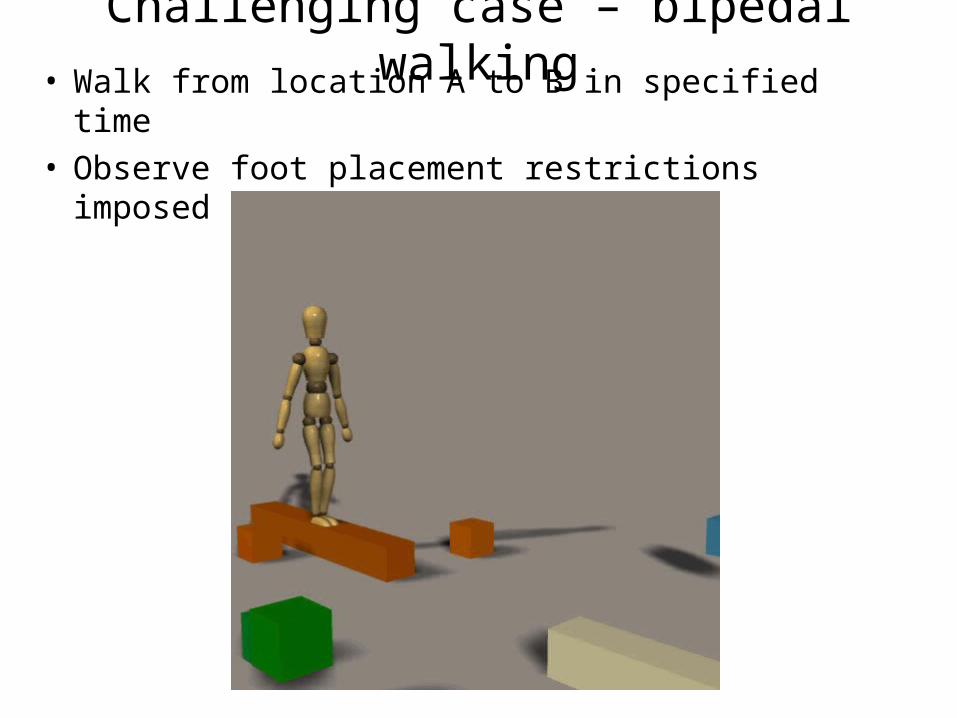
Challenging case – bipedal walking• Walk from location A to B in specified time• Observe foot placement restrictions imposed by terrain
Challenging case – Bipedal Machines
• Walk from location A to B in specified time

Challenging case – Bipedal Machines
• Walk from location A to B in specified time
• Should not fall, even if disturbed
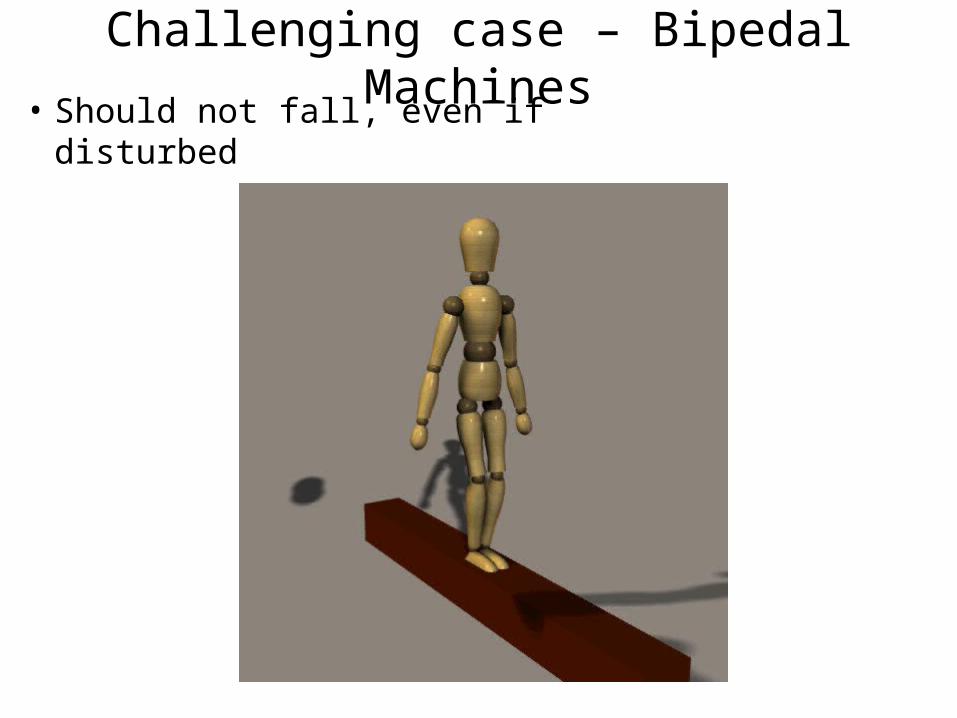
Challenging case – Bipedal Machines• Should not fall, even if disturbed

Challenging case – Bipedal Machines
• Should not fall, even on shaky ground

Challenging case – Bipedal Machines• Should not fall, even on shaky ground

Challenging case – Bipedal Machines• Should not fall, even on shaky ground
• But there are limits!

Approach – walking task spec
Rf_1
x
y Lf_1
Rf_2
Lf_2X_lb X_ub
Y_lb
Y_ub
Foot placement
QualitativeGait Poses
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
Lf_2
Rf_2
Double supportleft foot in front
Left singlesupport
Double supportright foot in front
Right singlesupport
Double supportleft foot in front
x - forwardy - lateral
[20, 30] tSpatial goal region
specificationTemporal rangespecification
Qualitative State Plan

Computing torques to achieve a particular state goal is challenging
?desCM
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
Lf_2
Rf_2
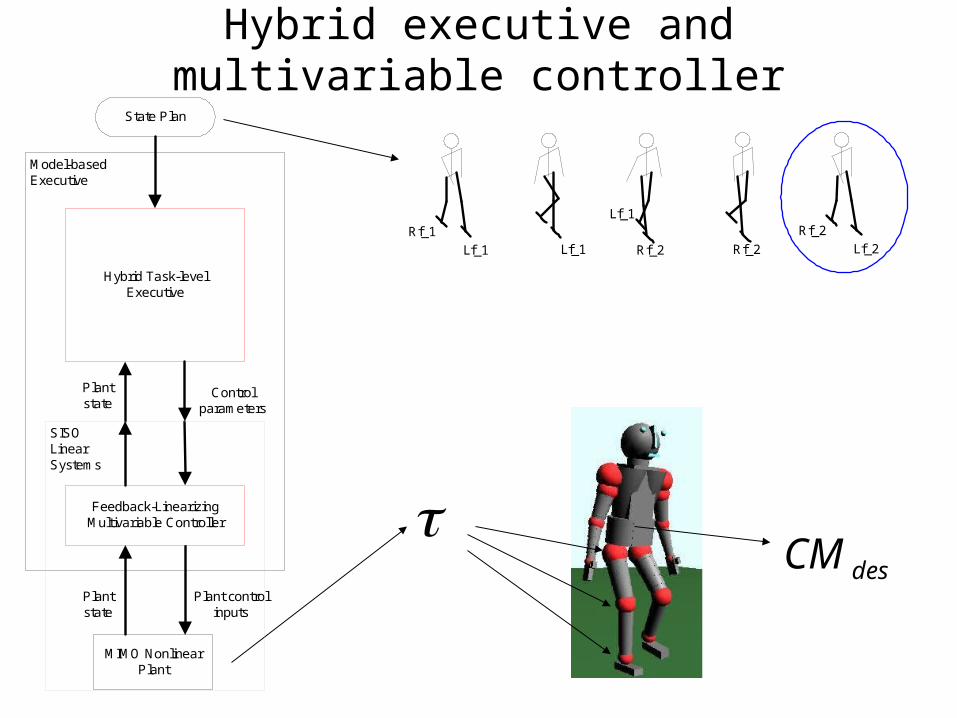
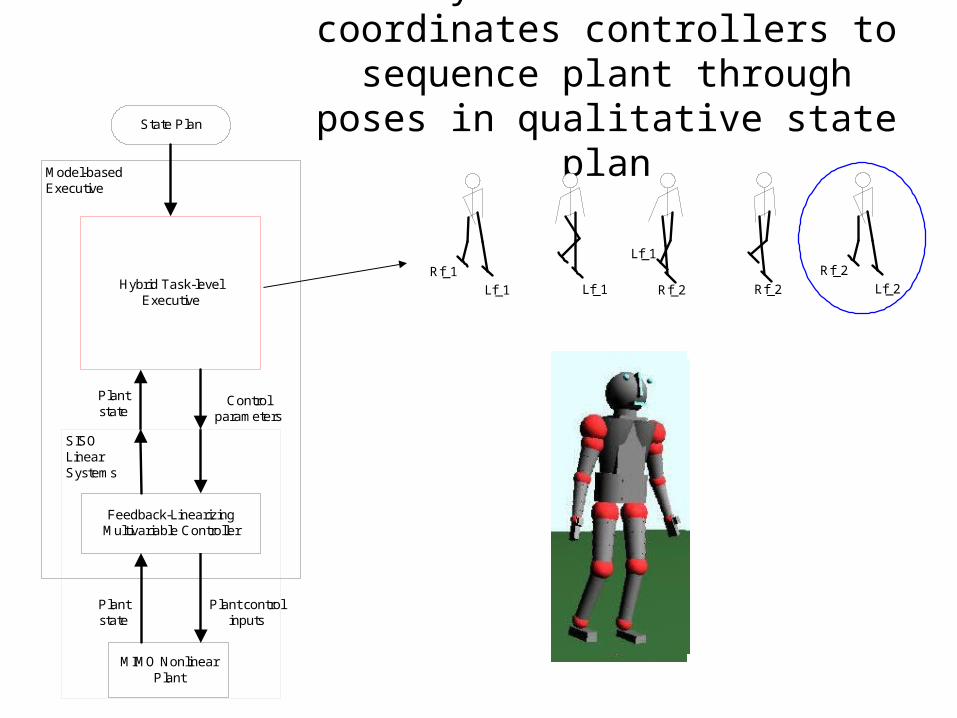
Hybrid executive and multivariable controller
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
Lf_2
Rf_2
desCM
Model-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Task-levelExecutive
SISOLinearSystems
Controlparameters
Plantstate
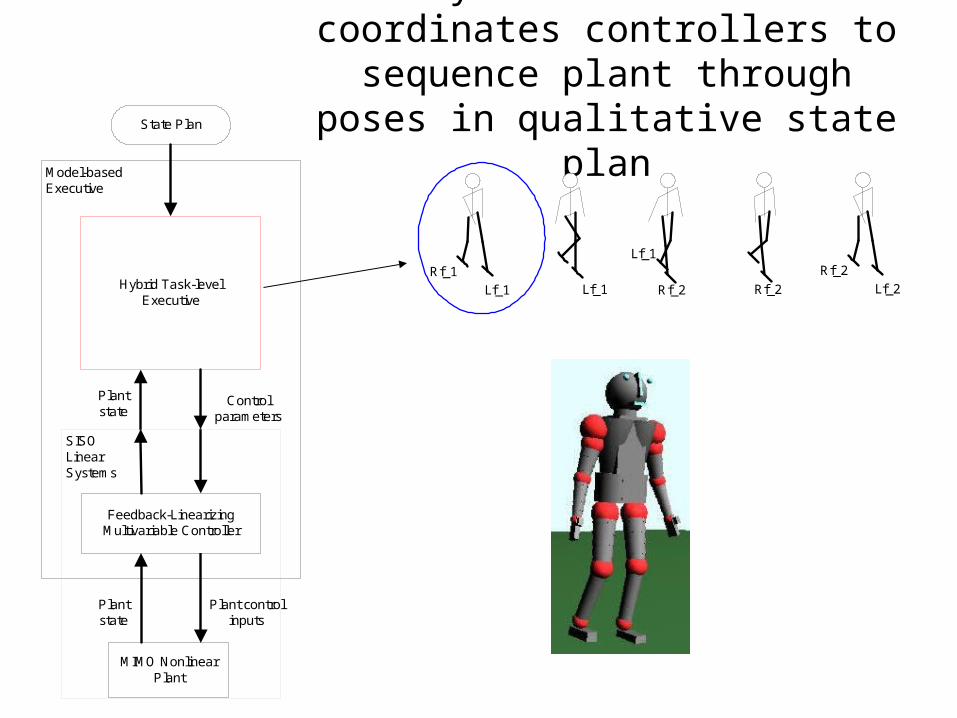
Hybrid executive coordinates controllers to sequence plant through poses in
qualitative state planModel-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Task-levelExecutive
SISOLinearSystems
Controlparameters
Plantstate
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
Lf_2
Rf_2
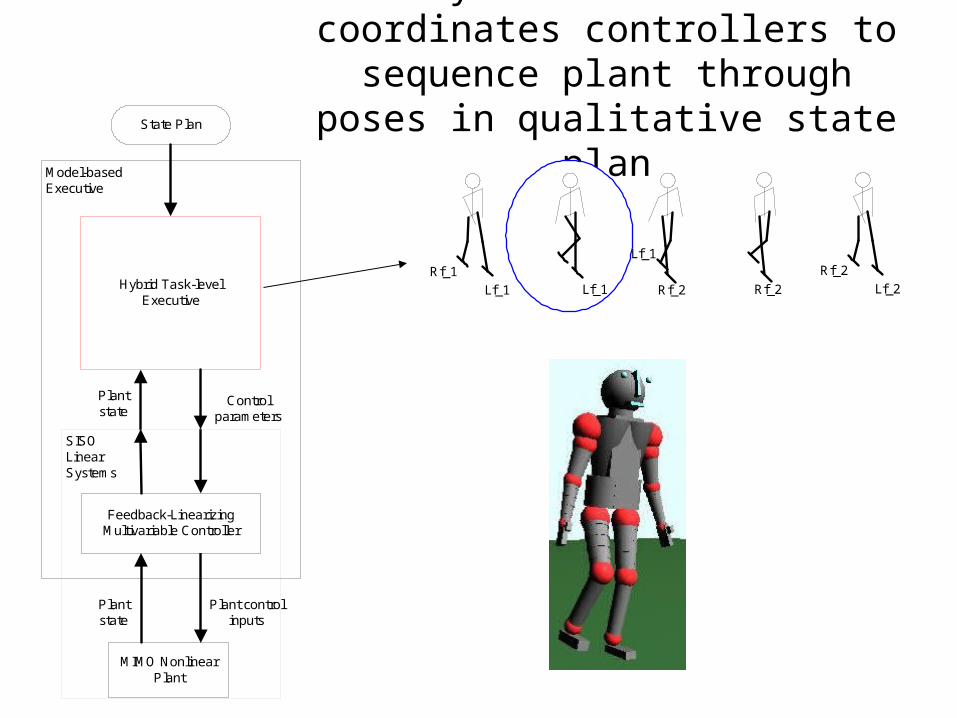
Hybrid executive coordinates controllers to sequence plant through poses in
qualitative state planModel-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Task-levelExecutive
SISOLinearSystems
Controlparameters
Plantstate
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
Lf_2
Rf_2
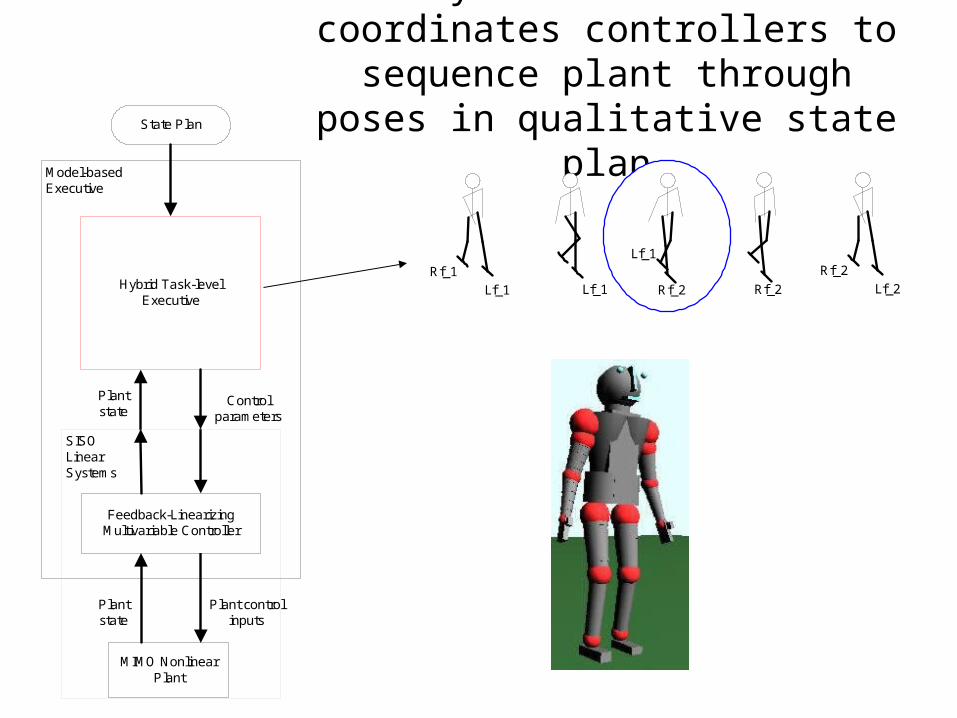
Hybrid executive coordinates controllers to sequence plant through poses in
qualitative state planModel-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Task-levelExecutive
SISOLinearSystems
Controlparameters
Plantstate
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
Lf_2
Rf_2
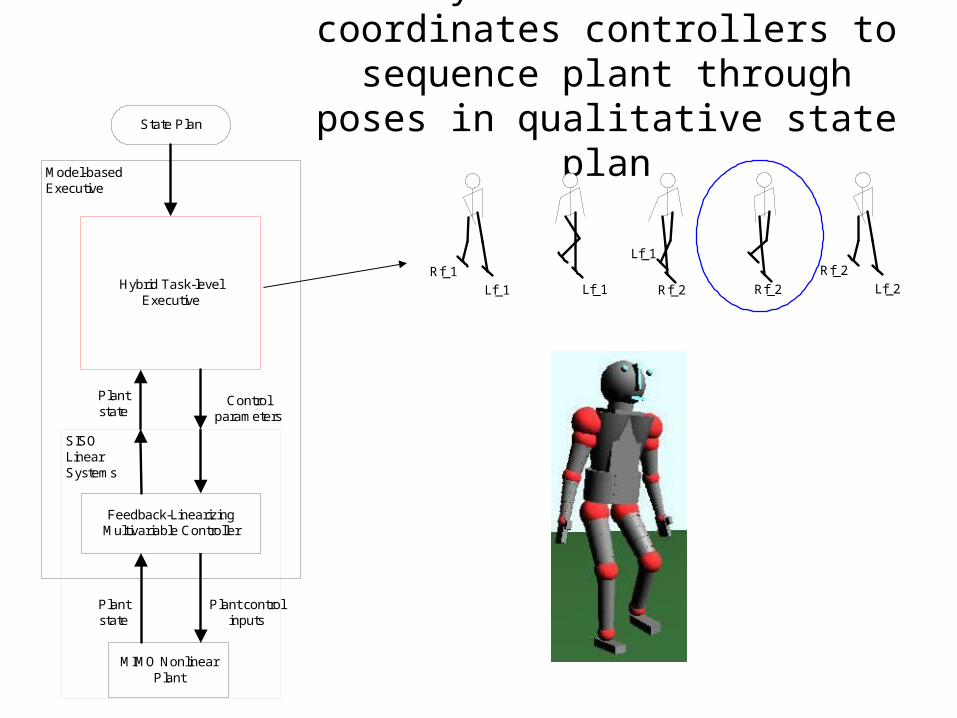
Hybrid executive coordinates controllers to sequence plant through poses in
qualitative state planModel-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Task-levelExecutive
SISOLinearSystems
Controlparameters
Plantstate
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
Lf_2
Rf_2
Hybrid executive coordinates controllers to sequence plant through poses in
qualitative state planModel-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Task-levelExecutive
SISOLinearSystems
Controlparameters
Plantstate
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
Lf_2
Rf_2

Model-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Task-levelExecutive
SISOLinearSystems
Controlparameters
Plantstate
1y
1y 1y+
dk
sety _1
+ pk-
+-
sety _1
• Multivariable controller • makes state plan quantities, like CM, directly
controllable
• allows hybrid executive to control CM by adjusting linear gain parameters
CM
Kp Kd
Innovations• Requirement: Stable walking

Innovations• Requirement: Stable walking
Previous Approaches
Innovations• Requirement: Stable walking
Previous Approaches

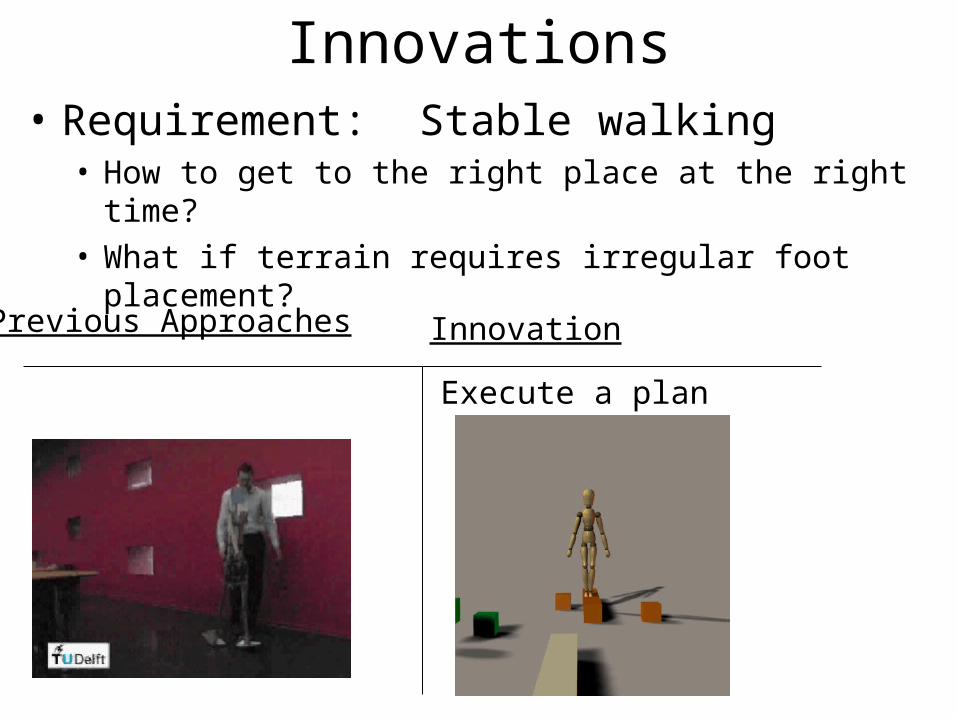
Innovations• Requirement: Stable walking
• How to get to the right place at the right time?
• What if terrain requires irregular foot placement?
Previous Approaches
Innovations• Requirement: Stable walking
• How to get to the right place at the right time?
• What if terrain requires irregular foot placement?
Previous Approaches Innovation
Execute a plan
Innovations
Previous Approaches
t
Left knee
t
Left hip pitch
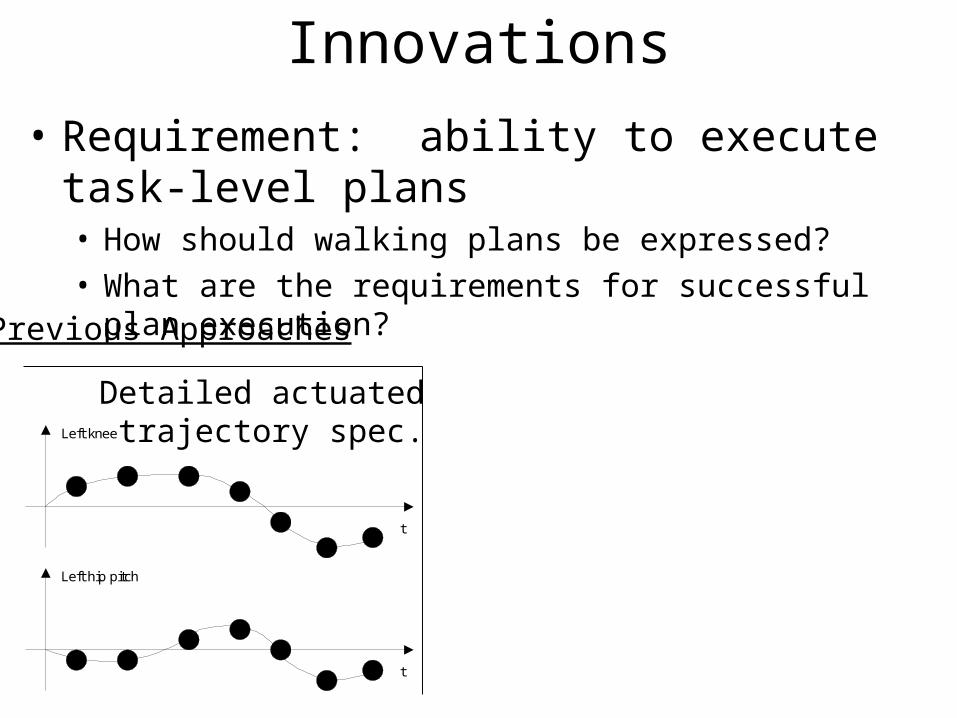
Detailed actuated trajectory spec.
• Requirement: ability to execute task-level plans• How should walking plans be expressed?
• What are the requirements for successful plan execution?
Innovations
Previous Approaches Innovation
t
Left knee
t
Left hip pitch
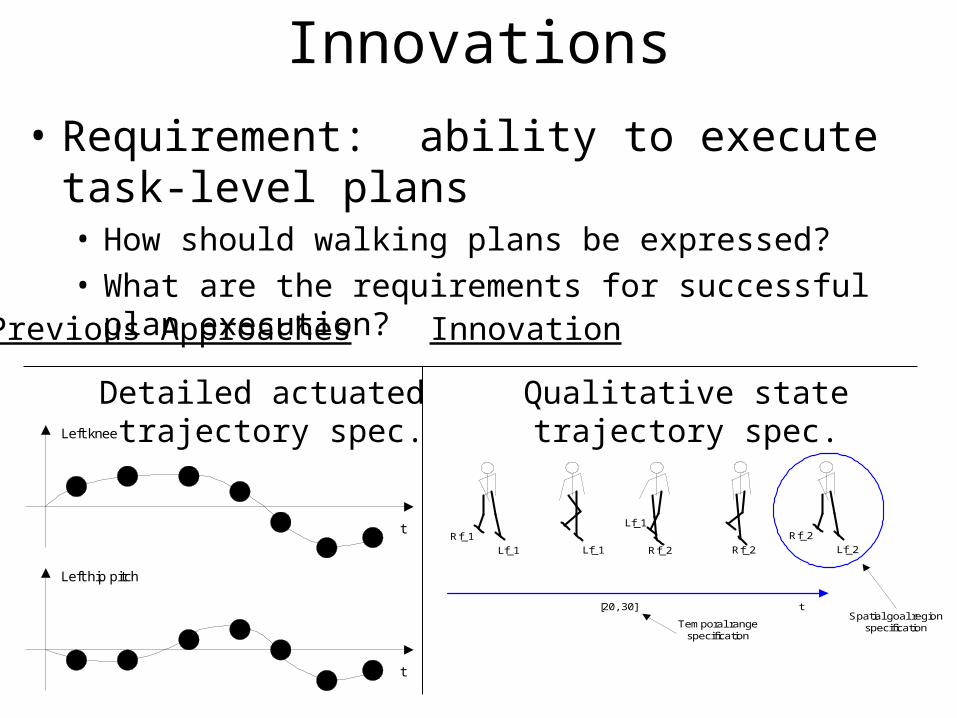
Detailed actuated trajectory spec.
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
Lf_2
Rf_2
[20, 30] tSpatial goal region
specificationTemporal rangespecification
Qualitative state trajectory spec.
• Requirement: ability to execute task-level plans• How should walking plans be expressed?
• What are the requirements for successful plan execution?

Innovations
Previous Approaches Innovation
t
Left knee
t
Left hip pitch
Detailed actuated trajectory spec.
Qualitative control plan
• Requirement: ability to execute task-level plans• How should walking plans be expressed?
• What are the requirements for successful plan execution?
Lateral CM
Forward CM

Innovations
• Requirement: ability to deal with disturbances• What balance strategies can bipeds (like humans) use?

Innovations
• Requirement: ability to deal with disturbances• What balance strategies can bipeds (like humans) use?
Previous Approaches
Uses primarily ankle torque
strategy
Innovations
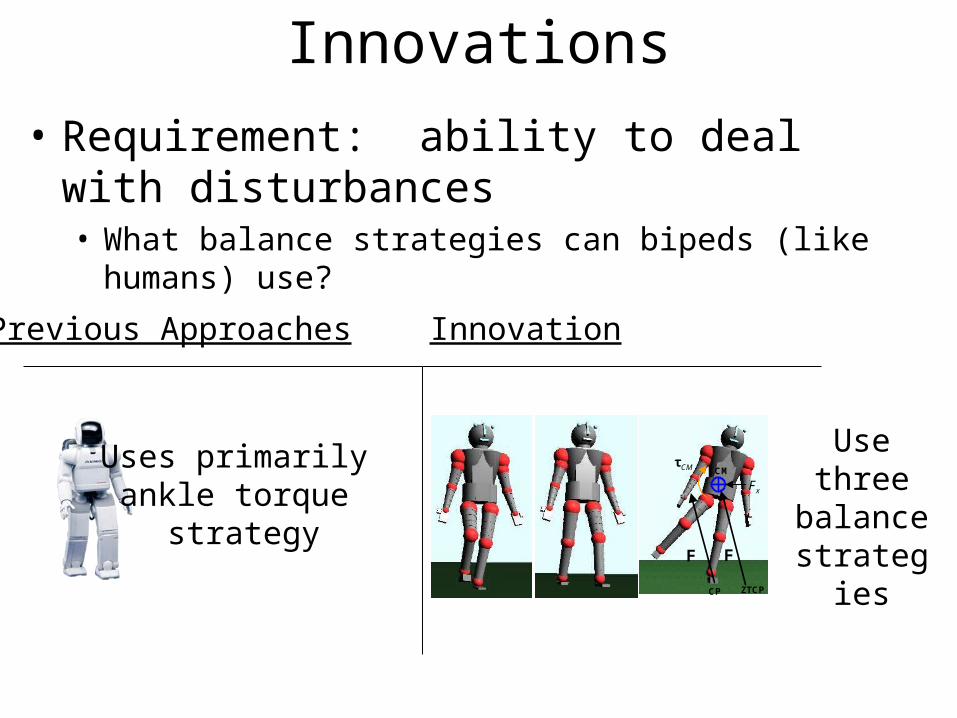
• Requirement: ability to deal with disturbances• What balance strategies can bipeds (like humans) use?
Previous Approaches
Uses primarily ankle torque
strategy
CM
CP ZTCP
F
F
xF
CMτUse threebalance
strategies
Innovation
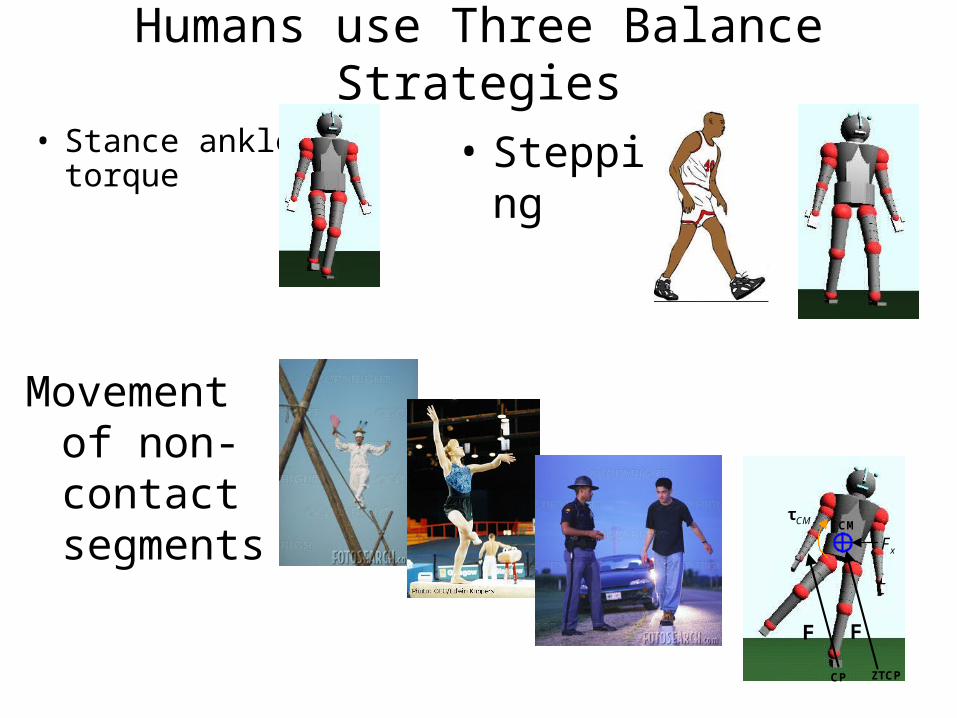
Humans use Three Balance Strategies
• Stance ankle torque
• Stepping
Movement of non-contact segments
CM
CP ZTCP
F
F
xF
CMτ

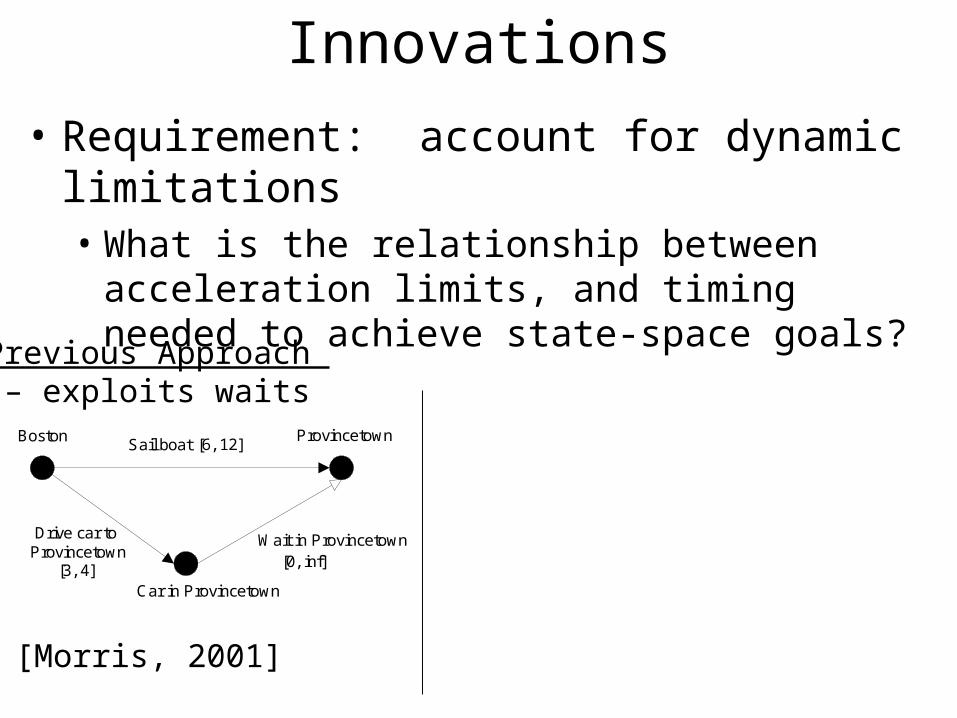
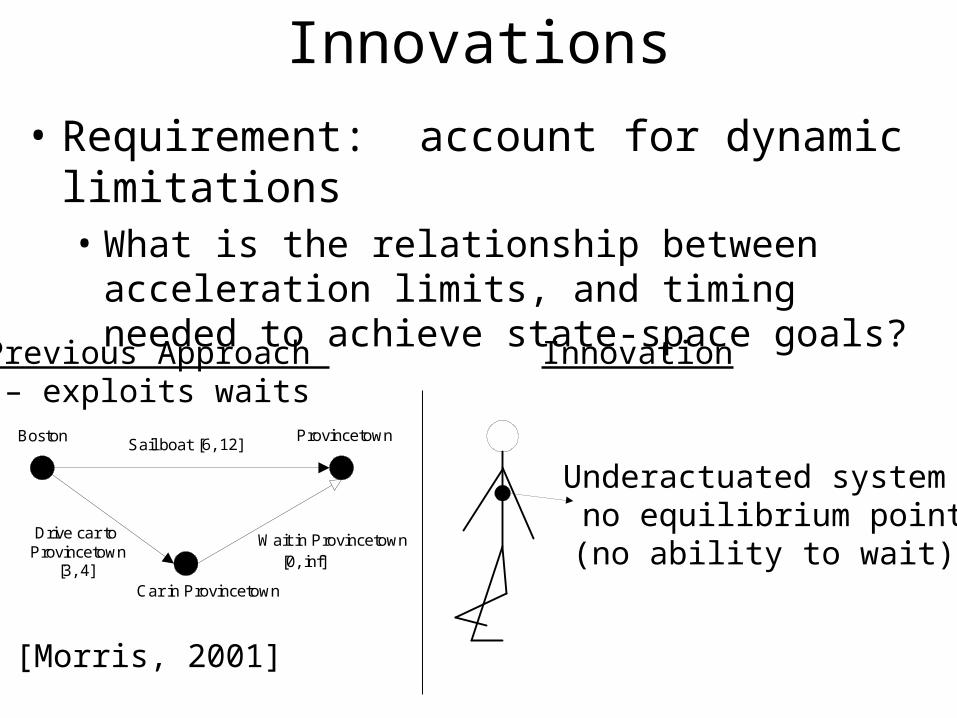
Innovations
• Requirement: account for dynamic limitations• What is the relationship between acceleration limits,
and timing needed to achieve state-space goals?
Innovations
• Requirement: account for dynamic limitations• What is the relationship between acceleration limits,
and timing needed to achieve state-space goals?
Previous Approach – exploits waits
[Morris, 2001]
Sail boat [6, 12]Boston Provincetown
Car in Provincetown[3, 4]
Drive car to Provincetown
[0, inf]Wait in Provincetown
Innovations
• Requirement: account for dynamic limitations• What is the relationship between acceleration limits,
and timing needed to achieve state-space goals?
Previous Approach – exploits waits
[Morris, 2001]
Innovation
Underactuated system -no equilibrium point(no ability to wait)
Sail boat [6, 12]Boston Provincetown
Car in Provincetown[3, 4]
Drive car to Provincetown
[0, inf]Wait in Provincetown
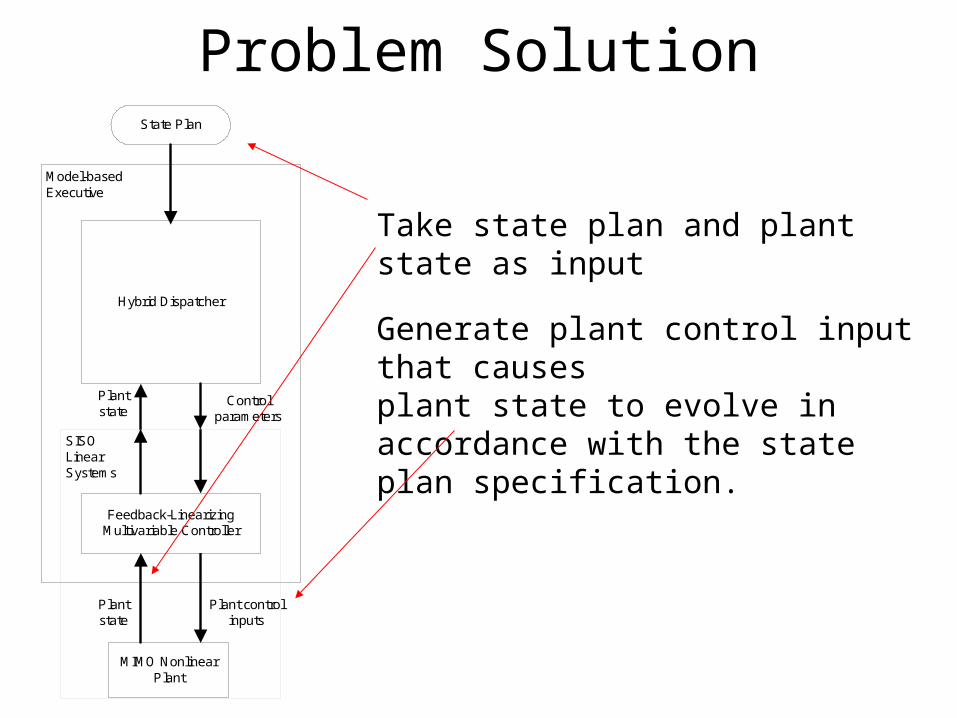
Problem Solution
Take state plan and plant state as input
Model-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Dispatcher
SISOLinearSystems
Controlparameters
Plantstate
Generate plant control input that causesplant state to evolve in accordance with the state plan specification.
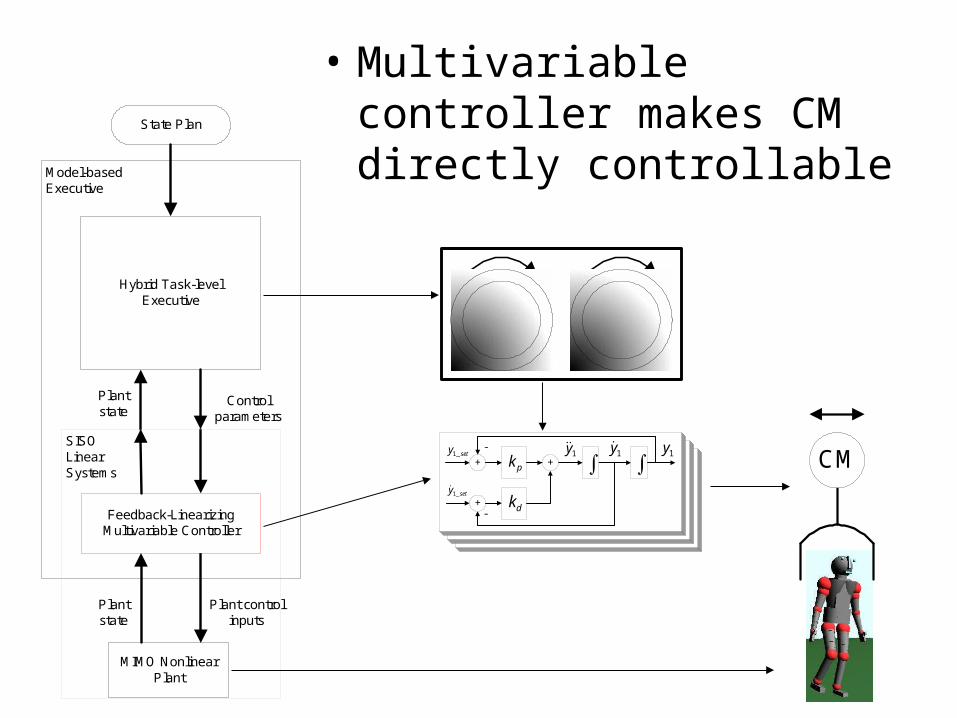
Model-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Task-levelExecutive
SISOLinearSystems
Controlparameters
Plantstate
1y
1y 1y+
dk
sety _1
+ pk-
+-
sety _1
• Multivariable controller makes CM directly controllable
CM
Kp Kd

Multivariable Controller Requirements
t
Left knee
t
Left hip pitch
• Want to specify coarse setpoint – Forward CM setpoint = 0
– Lateral CM setpoint = 0
• Controller should figure out detailed joint trajectories
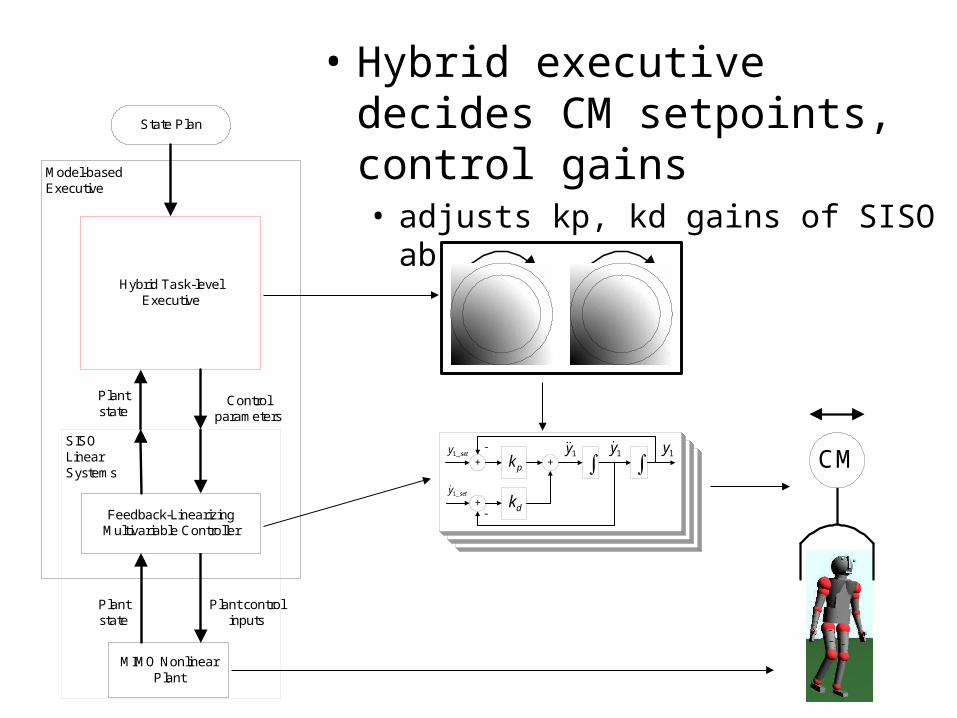
Model-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Task-levelExecutive
SISOLinearSystems
Controlparameters
Plantstate
1y
1y 1y+
dk
sety _1
+ pk-
+-
sety _1
• Hybrid executive decides CM setpoints, control gains• adjusts kp, kd gains of SISO abstraction
CM
Kp Kd
Hybrid Executive Requirements• Multivariable controller accepts single
setpoint

Hybrid Executive Requirements• Multivariable controller accepts single
setpoint
• Can’t, by itself, sequence through multiple setpoints
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
Lf_2
Rf_2
• Need hybrid executive for that
Model-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Task-levelExecutive
SISOLinearSystems
Controlparameters
Plantstate
1y
1y 1y+
dk
sety _1
+ pk-
+-
sety _1
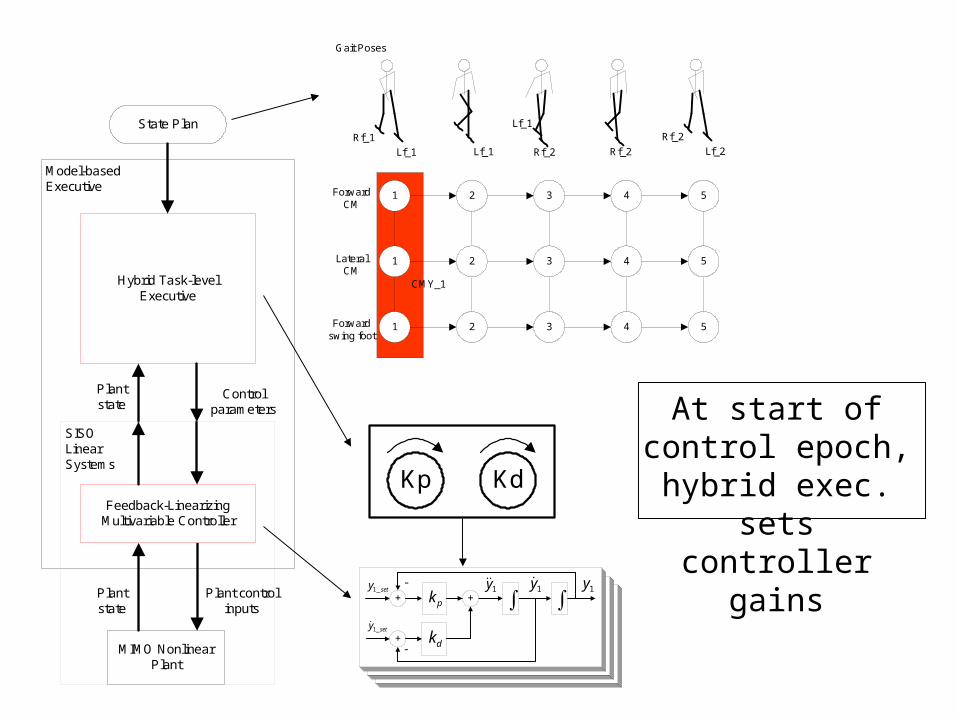
Kp Kd
1
LateralCM
2 3 4
Gait Poses
Lf_1
Rf_1Lf_1 Rf_2 Rf_2
Lf_1
5
Lf_2
Rf_2
1 2 3 4 5
1 2 3 4 5
ForwardCM
CMY_1
Forwardswing foot
At start of control epoch, hybrid exec. sets controller gains

Hybrid Executive guides each variable to its goal
1
LateralCM
2
Gait Poses
Lf_1
Rf_1Lf_1
1 2
1 2
ForwardCM
CMY_1
Forwardswing foot

Hybrid Executive transitions to next epoch• when goal for each variable is achieved
1
LateralCM
2
Gait Poses
Lf_1
Rf_1Lf_1
1 2
1 2
ForwardCM
CMY_1
Forwardswing foot

What if there is a disturbance?
ForwardCM
t
goal region
nominal actual
t1
t
nominal
t1
goal region
adjusted
pos.
Forwardstepping foot
• trip recovery

Disturbances and Controllability
• How can disturbances be handled?
• Given some bound on disturbances, is it possible to guarantee successful execution of a plan?
• Dispatchers for discrete systems
Sail boat [6, 12]Boston Provincetown
Car in Provincetown[3, 4]
Drive car to Provincetown
[0, inf]Wait in Provincetown
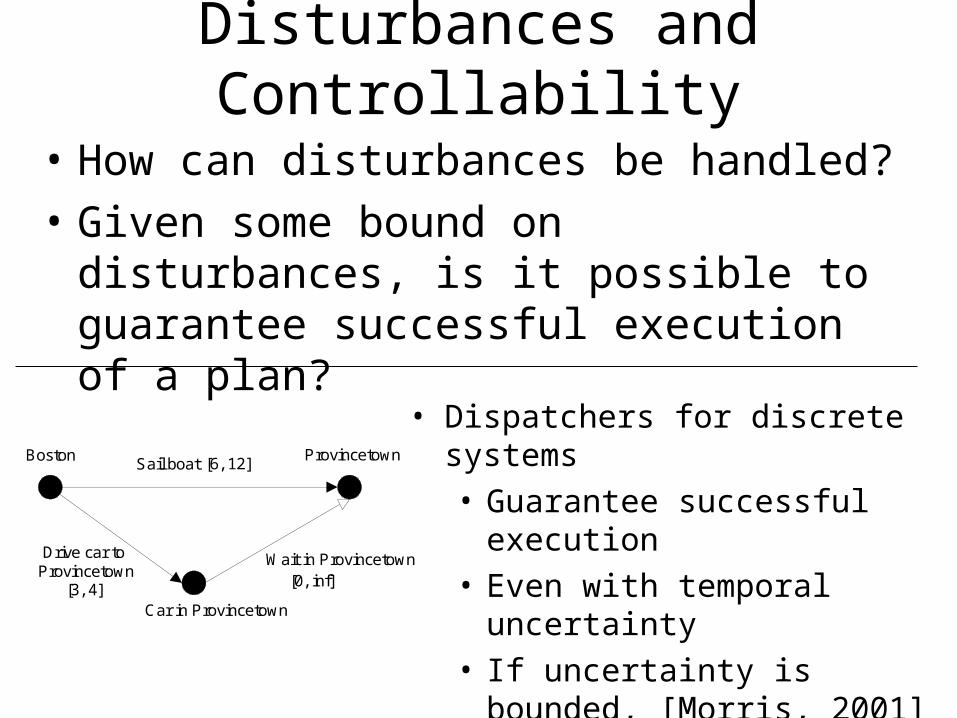
Disturbances and Controllability
• How can disturbances be handled?
• Given some bound on disturbances, is it possible to guarantee successful execution of a plan?
• Dispatchers for discrete systems
• Guarantee successful execution
• Even with temporal uncertainty
• If uncertainty is bounded, [Morris, 2001]
Sail boat [6, 12]Boston Provincetown
Car in Provincetown[3, 4]
Drive car to Provincetown
[0, inf]Wait in Provincetown

Controllability for Hybrid Systems
• Executive guides variables to goal regions, but what should these regions be?
• Previous approaches [Pratt, et. al 1996] determine regions manually
• Can regions be computed automatically?
– based on relation between regions, time, and controllability limits?

Plan compiler computes limits
Model-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Dispatcher
QualitativeControl Plan
Plan Compiler
SISOLinearSystems
Controlparameters
Plantstate
t
Y'
Y
Initialregion
Nominaltrajectory
Targetregion
Computes spatial and temporal regions for all activities
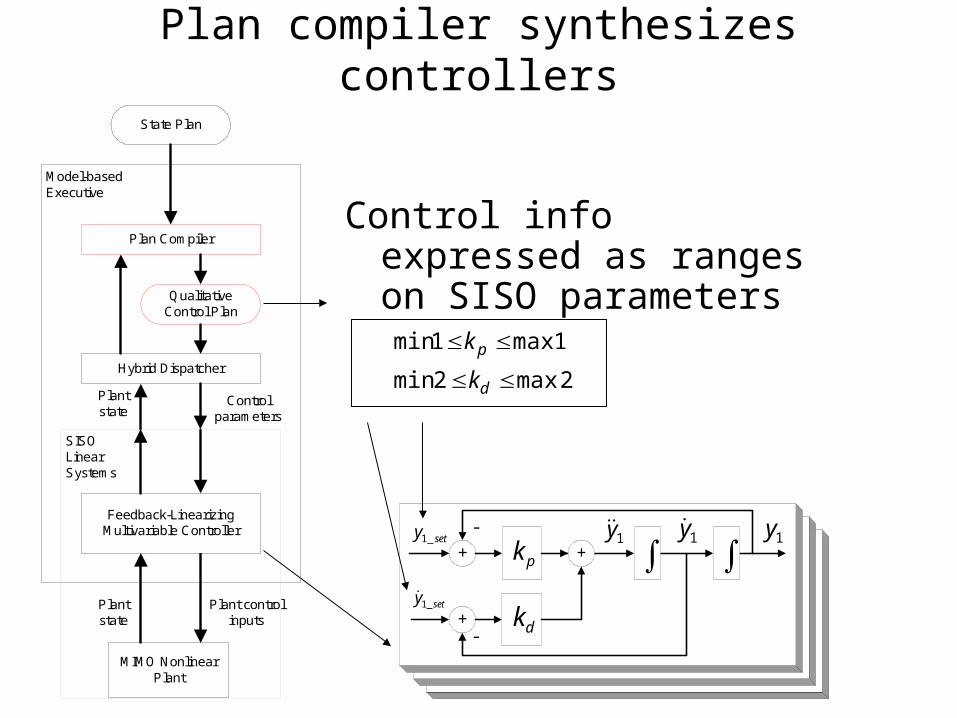
Plan compiler synthesizes controllers
Model-basedExecutive
State Plan
MIMO NonlinearPlant
Feedback-LinearizingMultivariable Controller
Plant controlinputs
Plantstate
Hybrid Dispatcher
QualitativeControl Plan
Plan Compiler
SISOLinearSystems
Controlparameters
Plantstate
1y
1y 1y+
dk
sety _1
+ pk-
+-
sety _1
Control info expressed as ranges on SISO parameters
2max2min
1max1min
d
p
k
k
Plan Compiler• Generate qualitative control plan from state plan:
• Compute initial and goal regions for each activity
• Compute duration range for each activity
• Compute control parameter ranges
• Formulate as Nonlinear Program, and solve by SQP
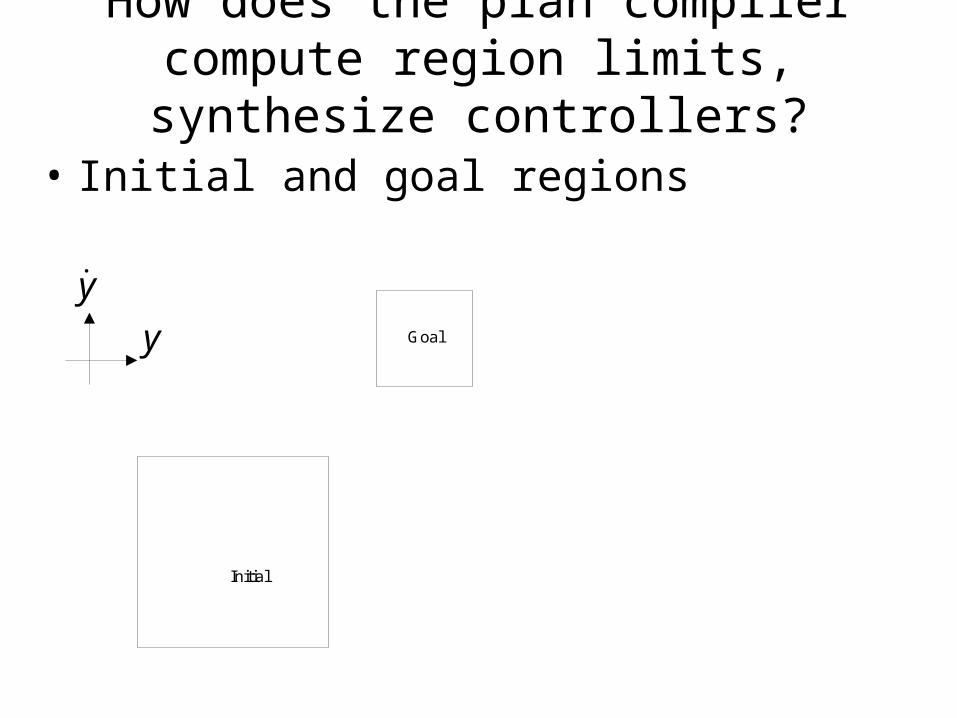
How does the plan compiler compute region limits, synthesize controllers?
• Initial and goal regions
y
y
Initial
Goal
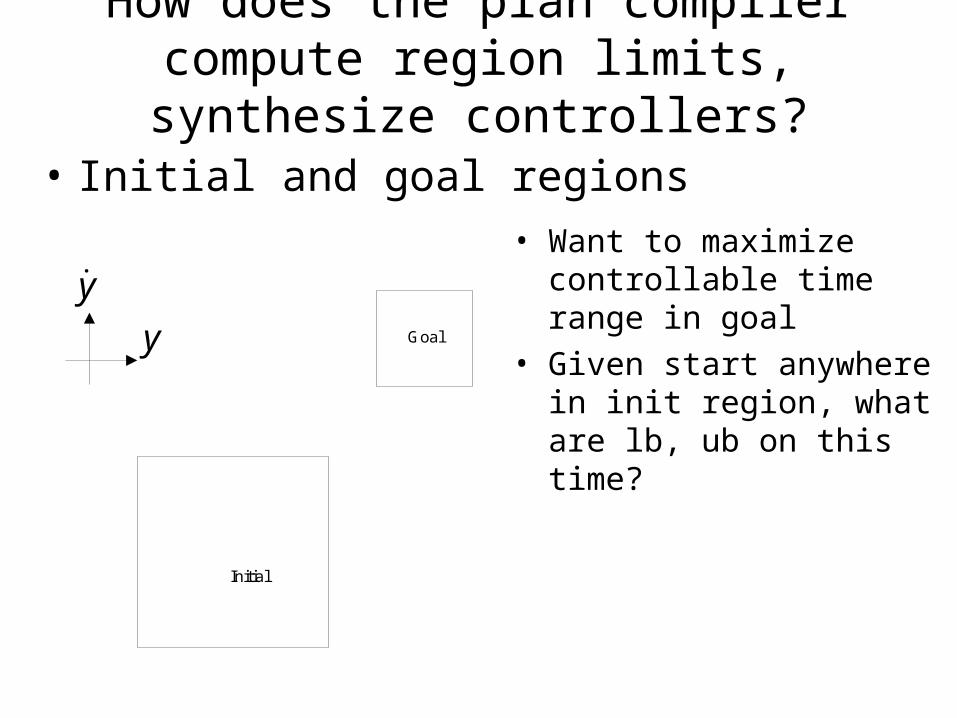
How does the plan compiler compute region limits, synthesize controllers?
• Initial and goal regions
y
y
Initial
Goal
• Want to maximize controllable time range in goal
• Given start anywhere in init region, what are lb, ub on this time?
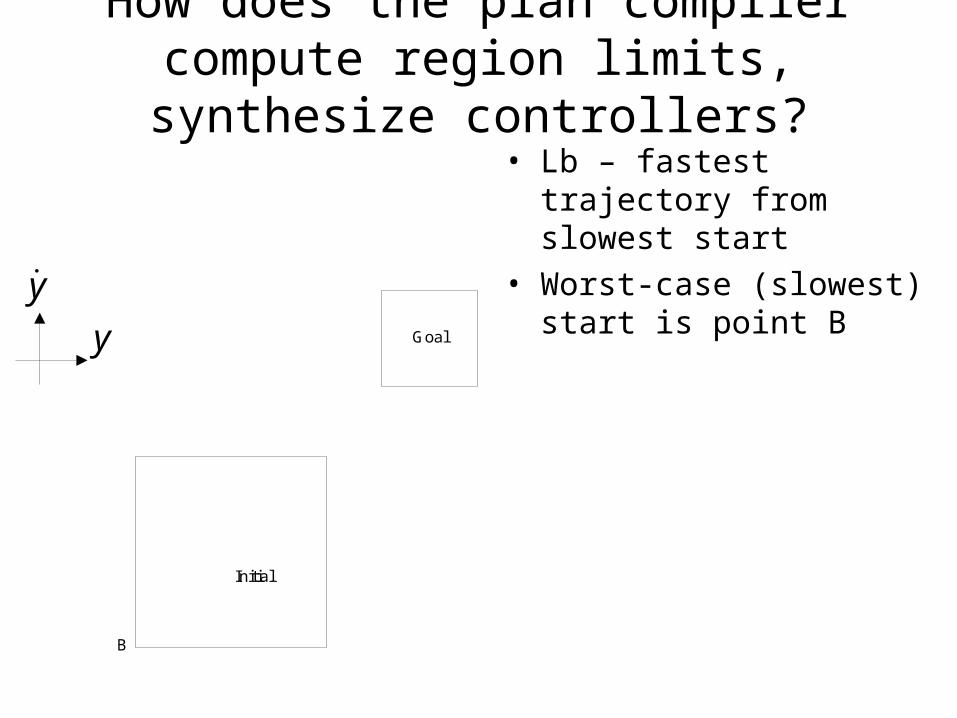
How does the plan compiler compute region limits, synthesize controllers?
• Lb – fastest trajectory from slowest start
• Worst-case (slowest) start is point B
y
y
Initial
Goal
B

How does the plan compiler compute region limits, synthesize controllers?
• Lb – fastest trajectory from slowest start
• Worst-case (slowest) start is point B
• Best-case (fastest) finish is point D
y
y
Initial
Goal
B
D
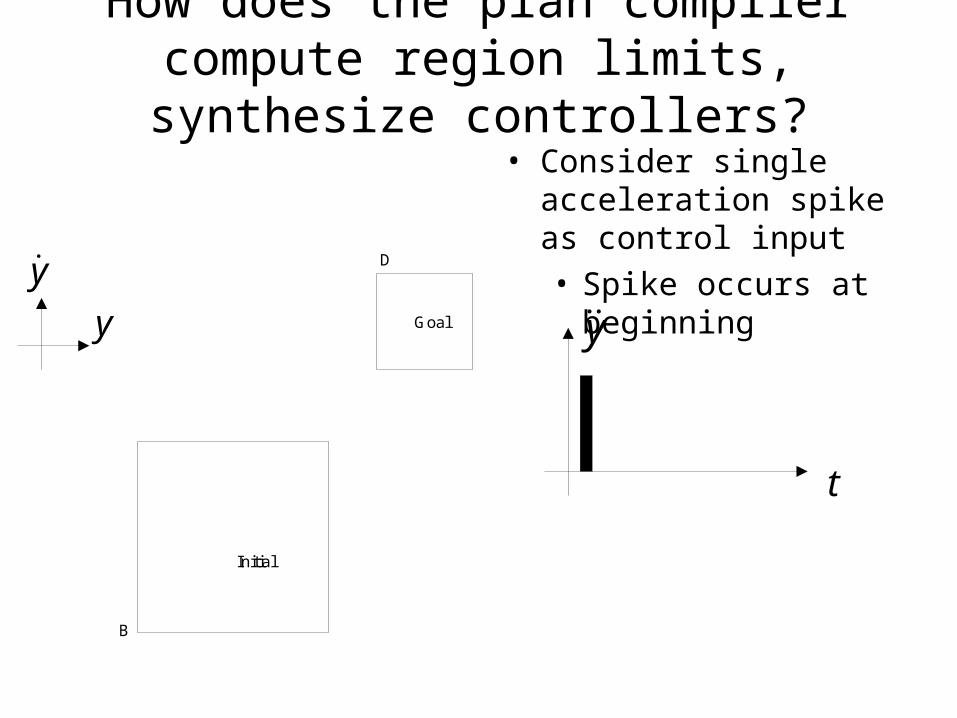
How does the plan compiler compute region limits, synthesize controllers?
• Consider single acceleration spike as control input
• Spike occurs at beginning
y
y
Initial
Goal
B
D
y
t

How does the plan compiler compute region limits, synthesize controllers?
• Consider single acceleration spike as control input
• Spike occurs at beginning
y
t
• If spike has the right size, results in GFT (Guaranteed Fastest Trajectory)
y
y
Initial
Goal
B
D

How does the plan compiler compute region limits, synthesize controllers?
• Ub – slowest trajectory from fastest start
• Worst-case (fastest) start is point A
• Best-case (slowest) finish is point C
y
y
Initial
Goal
B
D
A
C

How does the plan compiler compute region limits, synthesize controllers?
y
y
Initial
Goal
B
D
A
C
• Spike of right size at end results in GST (Guaranteed Slowest Trajectory)
y
t
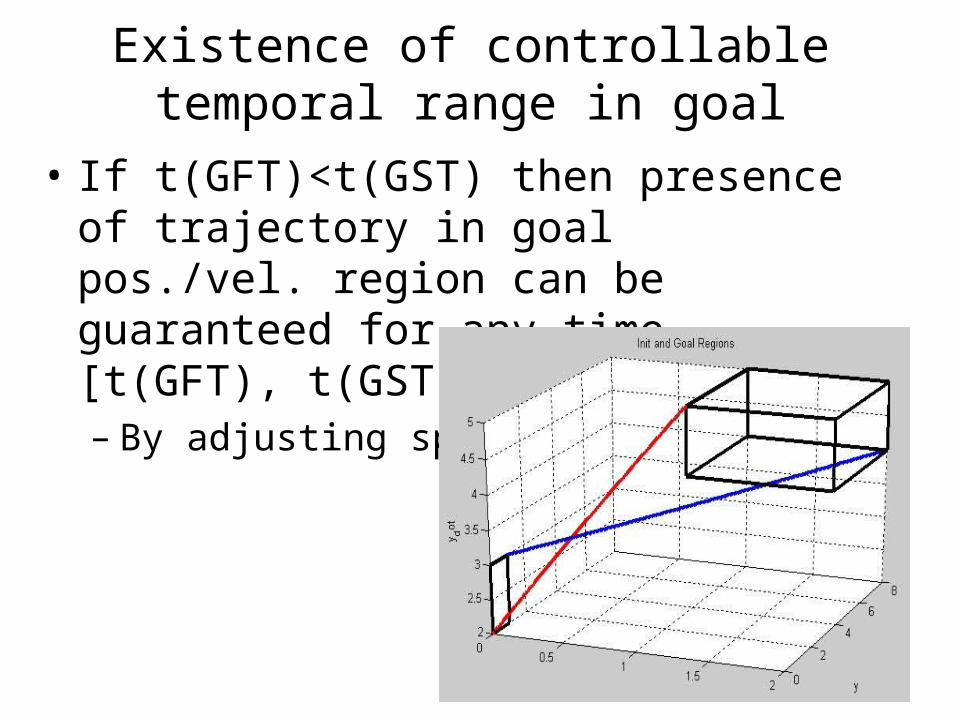
Existence of controllable temporal range in goal
• If t(GFT)<t(GST) then presence of trajectory in goal pos./vel. region can be guaranteed for any time [t(GFT), t(GST)]– By adjusting spike

GFT, GST with linear control law• Adjust control law parameters to get GFT, GST
A – max pos., vel. (fastest start)
B – min pos., vel. (slowest start)
C – max pos., min vel. (slowest finish)
D – min pos., max vel. (fastest finish)
Assume monotonic velocity
A
B
y
y
C
D
Initial
Goal
GFT
GST
• Maximize controllable temporal range, initial region size
• Subject to limits on control inputs
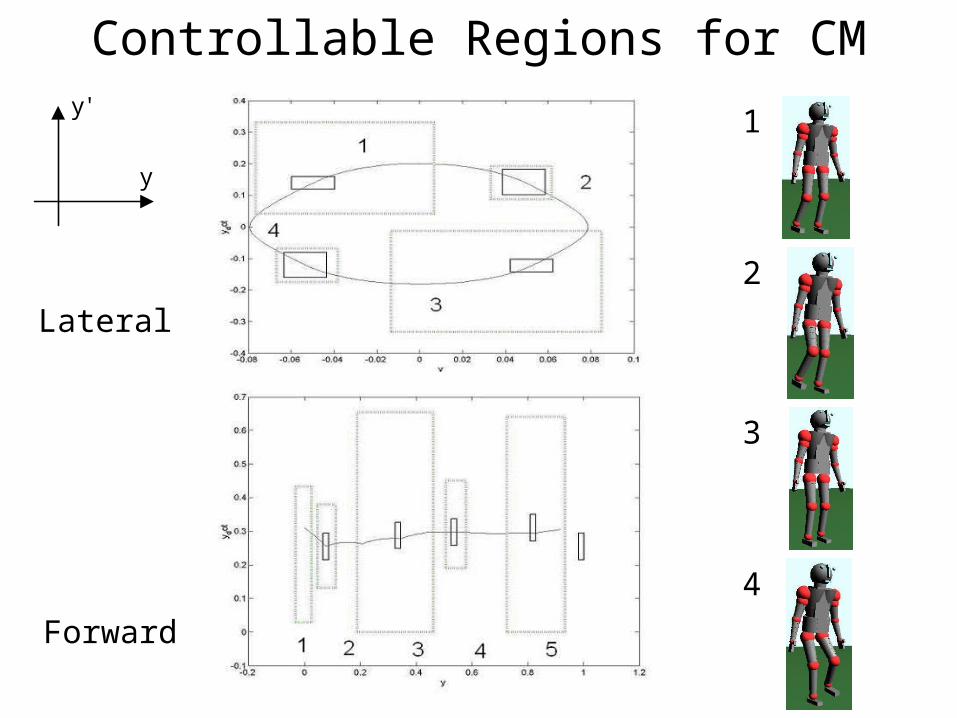
Controllable Regions for CM
1
y
y'
Lateral
Forward
2
3
4
Discussion• Hybrid executive
– From qualitative state plan, automatically synthesizes controllers
• Computes dispatcher regions and gain ranges
– Successful, stable execution achieved by getting key variables into right region at right time
• Provides significant flexibility in how they actually get there
– Relies on SISO decoupling, linearization provided by multivariable controller
Conclusion• Robustness achieved through integration of
three balance control strategies
• Robust plan execution achieved for hybrid system by extending techniques used for discrete systems
• Efficiency of execution achieved through compilation of plan into dispatchable form
Addendum
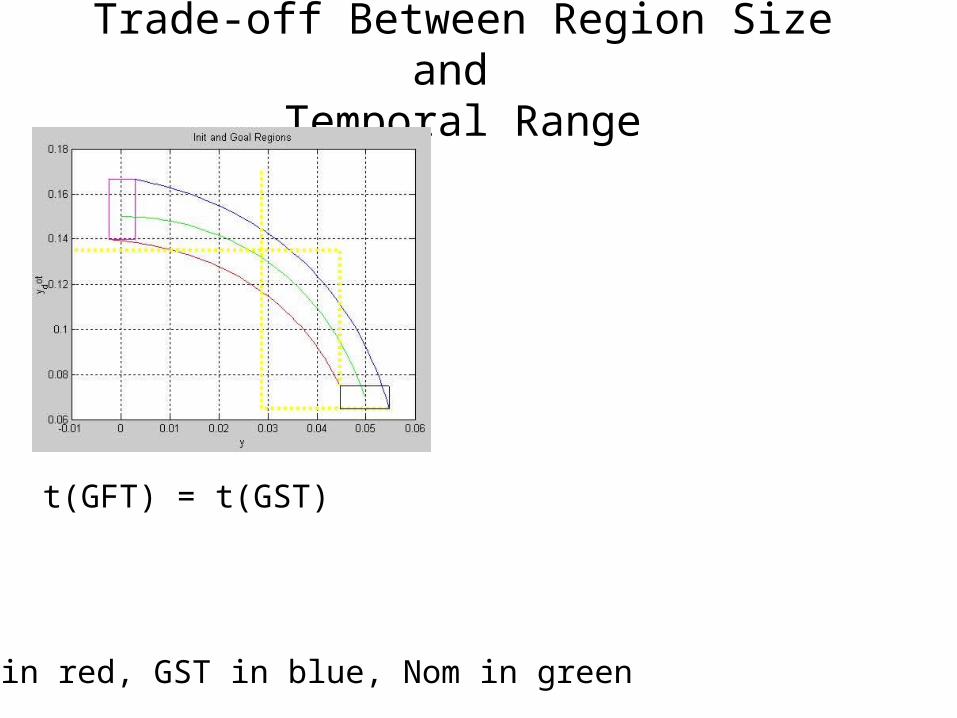
Trade-off Between Region Size and Temporal Range
t(GFT) = t(GST)
GFT in red, GST in blue, Nom in green

Trade-off Between Region Size and Temporal Range
t(GFT) = t(GST)
GFT in red, GST in blue, Nom in green
t(GFT) > t(GST)
Some uncertainty in duration
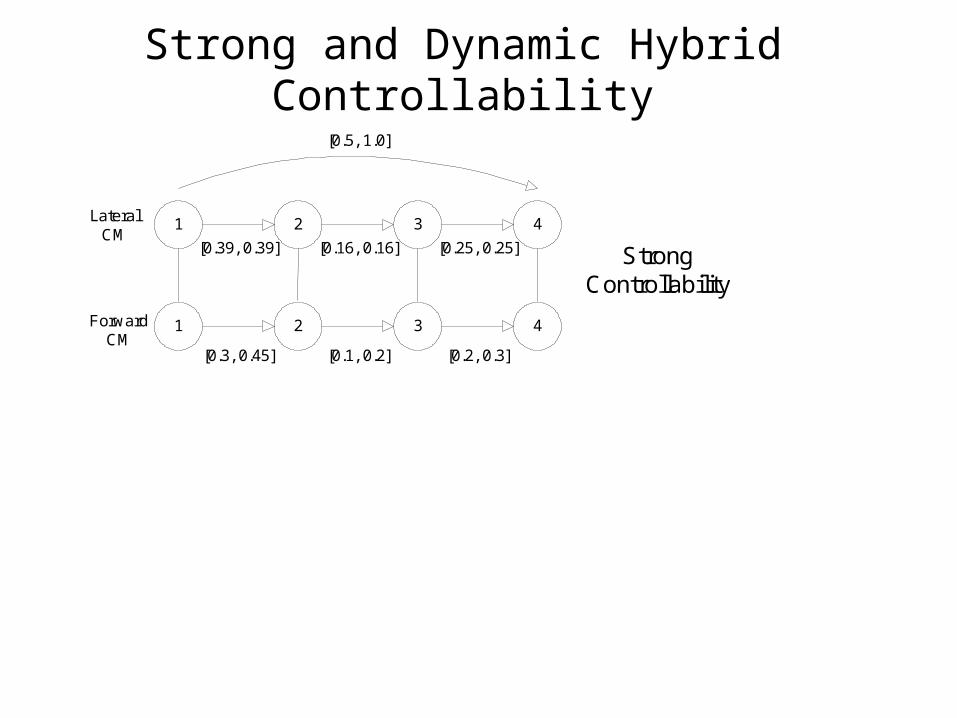
Strong and Dynamic Hybrid Controllability
1LateralCM
2 3 4
[0.5, 1.0]
1 2 3 4ForwardCM
[0.39, 0.39] [0.16, 0.16] [0.25, 0.25]
[0.3, 0.45] [0.1, 0.2] [0.2, 0.3]
StrongControllability
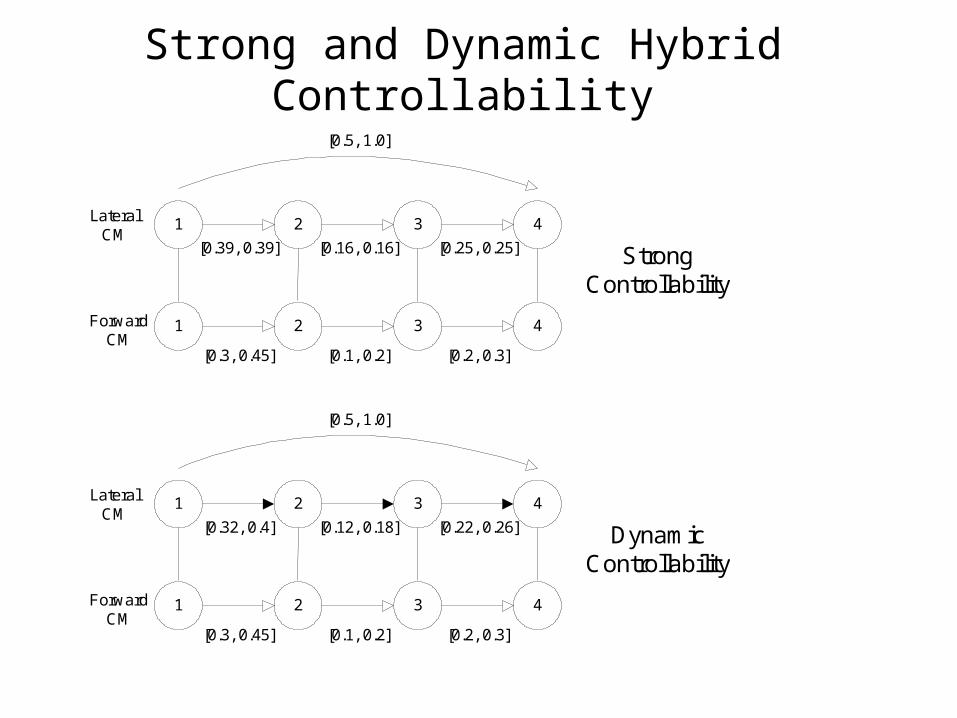
Strong and Dynamic Hybrid Controllability
1LateralCM
2 3 4
[0.5, 1.0]
1 2 3 4ForwardCM
[0.39, 0.39] [0.16, 0.16] [0.25, 0.25]
[0.3, 0.45] [0.1, 0.2] [0.2, 0.3]
StrongControllability
1LateralCM
2 3 4
[0.5, 1.0]
1 2 3 4ForwardCM
[0.32, 0.4] [0.12, 0.18] [0.22, 0.26]
[0.3, 0.45] [0.1, 0.2] [0.2, 0.3]
DynamicControllability