RR199 TEMPSC Structural Design Basis Determination. Part 2
156
HSE Health & Safety Executive TEMPSC Structural Design Basis Determination Part 2 – Design Events and Failure Capabilities Prepared by P A F A Consulting Engineers for the Health and Safety Executive 2004 RESEARCH REPORT 199
Transcript of RR199 TEMPSC Structural Design Basis Determination. Part 2

HSE Health & Safety
Executive
TEMPSC Structural Design Basis Determination Part 2 – Design Events and Failure Capabilities
Prepared by P A F A Consulting Engineers for the Health and Safety Executive 2004
RESEARCH REPORT 199

HSE Health & Safety
Executive
TEMPSC Structural Design Basis Determination Part 2 – Design Events and Failure Capabilities
P A F A Consulting Engineers Hofer House
185 Uxbridge Road Hampton
Middlesex TW12 1BN
UK
This report part 2 covers phase 2 of a three phase HSE-funded study into the structural design basis determination for Totally Enclosed Motor Propelled Survival Craft (TEMPSC). Part 1 addresses Structural Design Basis determination, part 3 Event Levels and Safety Margins. Emphasis is placed on typical TEMPSC that are currently in-service in the UK sector of the North Sea, and to that end the generic TEMPSC assessed is a 50-man, Glass Reinforced Plastic (GRP), side-on davit-launched craft, stationed on a fixed steel platform. Such a craft is typical of lifeboats installed in the early to mid 1980’s and therefore is designed and manufactured in accordance with the pre-1986 amendments to the 1974 Safety of Life at Sea (SOLAS) regulations.
The objective of phase 2 of this project is to identify the main events for which the TEMPSC may suffer structural failure and estimate the strength at failure for each such event. This phase of the project has identified a number of load events that are considered to be critical to the strength requirements of TEMPSC and maximum load capacities have been estimated for each event. In phase 3 of this project, safety margins will be addressed and the likelihood of each failure event will be quantified for TEMPSC in the UK sector of the North Sea.
This report and the work it describes were funded by the Health and Safety Executive (HSE). Its contents, including any opinions and/or conclusions expressed, are those of the authors alone and do not necessarily reflect HSE policy.
HSE BOOKS

© Crown copyright 2004
First published 2004
ISBN 0 7176 2817 5
All rights reserved. No part of this publication may bereproduced, stored in a retrieval system, or transmitted inany form or by any means (electronic, mechanical,photocopying, recording or otherwise) without the priorwritten permission of the copyright owner.
Applications for reproduction should be made in writing to:Licensing Division, Her Majesty's Stationery Office, St Clements House, 2-16 Colegate, Norwich NR3 1BQ or by e-mail to [email protected]
ii

1. Summary General: This report part 2 covers phase 2 of a three phase HSE-funded study into the structural design basis determination for Totally Enclosed Motor Propelled Survival Craft (TEMPSC). Part 1 addresses Structural Design Basis determination, part 3 Event Levels and Safety Margins. Emphasis is placed on typical TEMPSC that are currently in-service in the UK sector of the North Sea, and to that end the generic TEMPSC assessed is a 50-man, Glass Reinforced Plastic (GRP), side-on davit-launched craft, stationed on a fixed steel platform. Such a craft is typical of lifeboats installed in the early to mid 1980’s and therefore is designed and manufactured in accordance with the pre-1986 amendments to the 1974 Safety of Life at Sea (SOLAS) regulations.
The objective of phase 2 of this project is to identify the main events for which the TEMPSC may suffer structural failure and estimate the strength at failure for each such event. This phase of the project has identified a number of load events that are considered to be critical to the strength requirements of TEMPSC and maximum load capacities have been estimated for each event. In phase 3 of this project, safety margins will be addressed and the likelihood of each failure event will be quantified for TEMPSC in the UK sector of the North Sea.
Methodology: � A rigorous and complete structural assessment of the TEMPSC was not within the
scope of the project and has not been performed. However, the adopted methodology is of sufficient accuracy to estimate typical failure loads for the identified events
� A primary assumption is that the TEMPSC cross-section is circular, thereby allowing the application of ring formulations either individually or by superposition. Examination of the TEMPSC cross-section and dimensions confirms that this assumption is reasonable.
� The two SOLAS-specified tests for structural integrity are used to calibrate an analysis methodology developed to estimate the failure strength of the TEMPSC.
� Following discussions with the HSE, six events were identified likely to lead to structural failure of TEMPSC. These events are noted below together with the corresponding limiting loads at failure, as determined from the analyses.
� Variations in load application length have shown that this is an important parameter. The strength of TEMPSC is directly related to the intensity and concentration of applied load.
Results: Loadcase No. and Description Capacity
Impact jacket member due to wind and oscillatory actions 116 N per mm length
Dropped into water due to winch/hook failure or release 280 N per mm length
Davit overload 398,000 kg
Immersion in water (upright/overturned) 0.3286 N/mm per mm (equiv. to 32.7m head)
Damage/submersion during towing 1700 N per mm length
Collision with jacket due to wave/current action following release 116 N per mm length
1

2. Content 1. Summary
2. Contents
3. Introduction
4. Objectives
5. Description of Failure Events
6. Assessment Methodology and Results
7. Observations
8. References
Tables
1. 8.0m, 50 Person TEMPSC, Strength Calculation Sheet 1
2. Mechanical Properties of Glass Reinforced Plastic
3. Design Events and Analysis Results
Figures
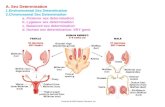
1. Design Events
2. Typical Layout of Pre-1986, 8.0m, 50 Person TEMPSC
3. 8.0m, 50 person TEMPSC, Strength Calculation Sheet 2
4. Idealised tensile stress-strain curve for WR GRP laminate
5. Stress-strain curves used in this assessment
Appendices
A. MATHCAD Calculation sheet
2

3. Introduction Since the Piper Alpha disaster (1988) and the subsequent report by Lord Cullen (1992), some consideration has been given to achieving the successful evacuation of offshore installations. In particular, this has included providing a range of evacuation methods for personnel on installations. For fixed platforms in the North Sea, the most frequently employed alternative means of evacuation remains the lifeboat or Totally Enclosed Motor Propelled Survival Craft (TEMPSC) as it is known in the UK offshore industry.
These lifeboats come in a range of sizes and employ a variety of launching modes. However, within this project, emphasis has been placed on those vessels capable of holding around 50 persons and launched via davits (as opposed to freefall), this type representing the most typical craft currently employed on fixed platforms in the UK sector of the North Sea.
In various studies, risk analyses have been performed to consider the probability of successful launch of TEMPSC and escape from the installation, for a range of environmental conditions. It became clear that for severe environmental conditions, TEMPSC launched on the windward side of the installation, in particular, could impact the side of the structure during descent and be driven back into the structure by the action of waves and currents. Furthermore, there is the possibility of the craft becoming damaged or submerged due to wave action or during tow by a rescue vessel. In all such cases it is important that the structural integrity of the TEMPSC is maintained.
The purpose of this project is to review the design, choice of materials, fabrication and construction of a typical 50-man davit-launched TEMPSC, so that the capacity and factors of safety can be determined for a number of accident scenarios. Phase 1 of the project comprised collation and review of background data, and the results of this phase were presented in a separate report (Reference 1). Phase 2 of the project concerns the identification of design events for which the TEMPSC may suffer structural failure and the calculation of the strength at failure for each such event. This document reports the results of the phase 2 investigations. Event levels and safety margins will be addressed in phase 3 of this project, thus quantifying the likelihood of each failure event in the UK sector of the North Sea.
3

4. Objectives General:
The project objectives, as stated in the Agreement between the UK Health and Safety Executive (HSE) and PAFA Consulting Engineers, are as follows:
� To consider input data capture and review a range of 50 man (typical size) TEMPSC configurations from drawings, specifications and other literature.
� To ascertain TEMPSC construction material properties, fabrication procedures and failure assessment methodologies.
� To consider design events and failure strength.
� To identify relevant design events, such as:
x boat clash with jacket brace,
x dropping into still water or a representative wave from a prescribed height,
x davit hanging overload,
x hydrostatic immersion in the sea (upright or overturned),
x stand-by vessel towing loads prior to recovery.
� To calculate failure capacities for each design event utilising existing or new analytical techniques.
� To consider event levels and safety margins.
� To determine appropriate performance levels for each event.
� To calculate a safety factor and margin against failure for each event.
� To produce a project report for each of the three project phases:
TEMPSC Structural Design Basis Determination
x Part 1 - Input Data Capture and Review
x Part 2 - Design Events and Failure Strength
x Part 3 - Event Levels and Safety Margins
The range of Totally Enclosed Motor Propelled Survival Craft is limited to those currently stationed on fixed platforms located in the North Sea.
While this specification includes both davit-launched TEMPSC employing vertical winch systems and freefall launched TEMPSC employing an inclined ramp, the emphasis of the project, design specifications, launch events and safety margins relate to conventionally davit-launched TEMPSC. Furthermore, it is assumed that TEMPSC is self-powered and piloted by a coxswain following release, rather than using a system that automatically pulls the craft clear of the structure (e.g. TOES).
4

Scope of Phase 2 – Design Events and Failure Capacities
Unlike other seagoing craft, TEMPSC spend the majority of their life suspended in the davits, out of the water. Maximum loading conditions are found to occur during the launch and escape phase rather than in the open water condition after deployment (Reference 2). The objective of phase 2 of work in this project is to identify design events for which the TEMPSC may suffer structural failure and to calculate the strength at failure for each such event.
In discussions with HSE, it was agreed that the strength of the TEMPSC would be investigated for the following launch and escape condition failure events:
� Impact jacket member due to wind and oscillatory actions;
� Dropped into water due to winch/hook failure or release;
� Davit overload;
� Immersion in water (upright/overturned);
� Damage/submersion during towing;
� Collision with jacket due to wave/current action following release.
5

5. Description of Failure Events General: TEMPSC may be subjected to loading from three possible conditions during their service life on an offshore platform. These conditions are (a) suspended in the davits out of the water, (b) during various stages of launch/escape and (c) in open sea after deployment. The most onerous loads for TEMPSC are found to occur during the launch and escape condition (Reference 2). Emphasis is therefore placed on this condition for the identification of critical loadcases and for subsequent estimation of the strength at failure of the TEMPSC. As described in Section 4, Scope of Phase 2 – Design Events and Failure Capacities, six loadcases have been identified as ones most likely to lead to structural failure of the TEMPSC.
From the findings of phase 1 of this project, it is noted that the SOLAS specifications require the TEMPSC to meet the following prerequisite structural and buoyancy criteria:
Fall wire launched lifeboat impact and drop strength GRP TEMPSC shall be of sufficient strength to withstand, when fully loaded and with skates or fenders in position, a lateral impact at a velocity of at least 3.5 m/s and also into the water from a height of at least 3.0 m.
Protection against acceleration Notwithstanding the Item covering ‘Fall wire launched lifeboat impact and drop strength’, a TEMPSC shall be constructed and fendered such that it provides protection against harmful accelerations resulting from impacts with the structure during launching. These impacts are to be simulated by a fully loaded test and have an impact velocity of not less than 3.5 m/s.
International Maritime Organisation (IMO) 81(70) Section 6.4 Lifeboat Impact and Drop Test The TEMPSC should be loaded to represent a full complement of personnel (100 kg weights should be secured to test the safety harness strength). Skates or fenders should be in position, if required. The TEMPSC should then be drawn back from its free hanging position so that when released to impact a fixed rigid vertical surface, the velocity at impact is 3.5 m/s.
In this phase of the project, the two SOLAS structural requirements noted above are analysed together with six launch and escape event loadcases, as follows:
1. SOLAS – Impact test;
2. SOLAS – Drop test;
3. Impact with a leg due to wind loading;
4. Impact with the sea due to a vertical drop;
5. Davit failure due to overload;
6. Failure due to hydrostatic pressure;
7. Failure due to towing load against a bow-wave;
8. Impact with a leg due to wind/wave/current loading.
6

In Loadcase 1 the SOLAS side impact test is analysed. For this loadcase the TEMPSC is assumed to impact a fixed rigid vertical surface at a velocity of 3.5 m/s (see Figure 1a). SOLAS requires the craft to exhibit sufficient strength to withstand this condition and remain seaworthy.
The second SOLAS-required test relates to a drop test (see Figure 1b) and this condition is analysed as Loadcase 2. SOLAS requires the craft to be seaworthy after it is subjected to a drop into water from a height of 3.0 m. Loadcases 1 and 2 are analysed using the methodology described in Section 6 and are used to calibrate and check the assessment methodology and assumptions.
Six other load conditions have been identified for the launch and escape condition. For these loadcases, analyses are undertaken to determine load levels that result in failure stresses. In Loadcase 3, the TEMPSC is assumed to impact a jacket tubular member as a result of wind oscillatory action. The orientation of the 1000 mm diameter tubular is assumed vertical, resulting in concentrated, or near-concentrated, loading onto the TEMPSC below the fender (see Figure 1c).
In Loadcase 4, the second SOLAS-specified test is repeated to estimate the drop height that results in failure stresses in the TEMPSC. A range of TEMPSC-to-sea impacts were considered and the worst-case scenario of instantaneous impact along the entire hull length was quantified. Figure 1d illustrates this loadcase.
A potential davit overload condition is investigated in Loadcase 5 (see Figure 1e). Maximum bending stresses at midspan are equated to failure stresses to determine the magnitude of loading that gives rise to an overload condition. In Phase 3, other potentially more onerous local aspects of failure, for example overload of the davits themselves will be addressed.
Loadcases 6 and 7 are investigated under a single analysis. Loadcase 6 examines TEMPSC submergence condition and the estimation of maximum hydrostatic pressure that causes failure stresses. Loadcase 7 describes wave loading and potential submergence during tow by a rescue vessel, but this condition is expected to be less onerous than the condition described by Loadcase 6. In phase 3, other potentially more onerous local aspects of failure, for example overload of the tow connection will be addressed. Figures 1f and 1g show the two conditions described above.
Loadcase 8 (see Figure 1h) is included to examine the stresses in the TEMPSC from potential stern impact with the jacket. Examination of Figure 2 confirms the stern section to be semicircular. For analysis purposes, it has been assumed that this condition can be simplified and assumed similar to Loadcase 5 (side impact onto a vertical jacket tubular), although it is recognised that even the smallest of stern collisions will result in the loss of propulsion and rudder control.
7

6. Assessment Methodology and Results TEMPSC configuration and description
For fixed platforms in the North Sea, the most frequently employed method of escape for a large number of evacuees remains the TEMPSC. These lifeboats come in a range of sizes and employ a variety of launching modes. However, within this project, emphasis has been placed on those vessels capable of holding around 50 persons and launched via davits (as opposed to freefall), this type representing the most typical craft currently employed on fixed platforms in the UK sector of the North Sea.
Figure 2 is reproduced from Reference 2, and shows general plan and elevation views of the selected generic TEMPSC used for the structural assessments in this project. The overall length of the lifeboat is 8.0 m and it is able to accommodate 50 personnel. Such a craft, constructed from GRP, is typical of lifeboats installed in the early to mid 1980’s and therefore is designed and manufactured in accordance with the pre-1986 amendments to the 1974 SOLAS regulations.
A typical midship’s section for the selected TEMPSC and strength calculations based on dimensions for each element are presented in Figure 3 and Table 1, respectively. The crosssectional height of the selected TEMPSC is 2.3m and its cross-sectional width is approximately 2.7 m. Figure 3 confirms the TEMPSC to have a near-circular cross section. The craft’s shell thickness varies from local maximum of 20 mm to 6.4 mm, however, it is generally 11 mm within the hull region and 6.4 mm in the canopy section. From the available structural data, it is concluded that the craft does not have any significant longitudinal stiffening.
GRP is commonly used for TEMPSC and benefits from a high strength to weight ratio. It also has the advantage of low production and maintenance costs, making it an ideal material for the construction of TEMPSC. The base materials for GRP are:
� gel coat, which is a polyester resin providing a protective outer coating for the base laminate,
� basic laminate components, comprising polyester resin and E-glass chopped strand mats (CSM) and woven roving (WR) type reinforcements.
Where additional strength is required, incorporating fabric or woven roving reinforcements may enhance the basic mat laminate characteristics. Typical mechanical properties for GRP were investigated in phase 1 of the project (Reference 1) and are discussed below.
Material Properties
In phase 1 of this project (Reference 1), a detailed literature review was performed to ascertain, amongst other information, material property data for GRP. Table 2 is reproduced from this report to show the full range of material properties assuming a GRP with around 30% CSM. These material properties were sent to the lifecraft industry for review, however, to date no feedback has been forthcoming.
The initial assumption of 30% CSM was based entirely on Reference 2 which states that:
“The chop strand type reinforcement and a measured proportion of polyester resin is applied to the mould as a prefabricated mat, made from short random orientated chopped strands of fibreglass, held together with a soluble resin binder……….
8

Where additional strength and tear resistance is required, the basic mat laminate characteristics can be improved by the introduction of fabric or woven roving reinforcements …….. This material provides higher strength and stiffness than chopped strand mat.
Chop strand mat laminates have lower glass content than woven roving laminates with resultant lower strength and modulus of elasticity (E Value). Therefore, chop strand mat laminates must be thicker, in order to have equivalent properties.
A typical maximum glass content for Mat laminates would be in the order of 30 %. A typical maximum glass content for Mat- woven-roving laminates would be 40 %. A typical maximum glass content for Woven-roving laminates would be 50 %.
Typical mechanical properties for a polyester resin- E glass mat laminate, having a glass content in the order of 30 %.
Tensile strength 85 - 90 (MPa) Flexural strength 180 - 200 (MPa)”
However, while the initial assumption of 30% CSM led to a good representation of stress within the two benchmark analyses described in the Assessment Methodology and Results, in this section, (Loadcases 1 and 2), the representation of elastic deformation was clearly inappropriate. This initial model gave estimates of deformation in the side impact and drop tests that would have almost flattened the TEMPSC at its maximum elastic deformation, see Table 3, Loadcase 1a. Therefore, the flexural Young’s modulus of E = 6,400 MPa, based on a linear stress-strain curve to ultimate failure, for the 30% CSM was considered unrepresentative of TEMPSC, in the critical hull regions, in particular.
To rectify this deformation problem, a GRP based on 50% WR was adopted for the hull, while the 30% CSM was retained for the canopy. The WR material has a flexural Young’s modulus over twice that of 30% CSM (E = 14,000 MPa) and a flexural ultimate strength of 280 MPa compared to 170 MPa for 30% CSM. All the relevant hull and canopy material properties are listed in Table 2, based primarily on data presented in References 3 and 4.
Furthermore, a more refined stress-strain curve was adopted based on Reference 3. The stressstrain curves were based on the statement in Reference 3 that, “in the case of typical marine-type GRP, initial damage, having the form of resin cracking and fibre debonding, occurs at a tensile strain of between 20% and 50% of the ultimate value and is associated with a reduction of up to 40% of Young’s modulus.”, see Figure 4. It can be seen that up to initial damage the modulus is greater. Beyond this point, the Young’s Modulus is based on a ‘secant’, i.e. a proportion of preand post- damage modulii, which will form the basis of the subsequent loading and unloading behaviour. In this study these values were ‘averages’, i.e. the material is assumed to be initially damaged at 35% of ultimate strain (Hult) and the Young’s modulus is assumed to reduce by 20% beyond this initial damage strain.
To meet these requirements, flexural and tensile stress-strain curves were specified, as illustrated in Figure 5. From Table 2, the ultimate tensile stress = 230 MPa and average tensile modulus = 15,800 MPa, therefore a failure strain of 0.0146 could be estimated. On average, the material is assumed to be damaged at 35% of ultimate strain (i.e. H = 0.005). A suitable change in tensile Young’s modulus was found to be E = 18,200 MPa to E = 14,500 MPa, i.e. a reduction in Young’s modulus of 20%. Similarly, the ultimate flexural stress = 280 MPa and flexural modulus = 14,000 MPa, yields a failure strain of 0.02. The GRP material was specified to damage at 35% of ultimate strain (i.e. H = 0.007). A suitable change in flexural modulus was found to be E = 16,000 MPa to E = 13,000 MPa, i.e. a reduction in Young’s Modulus of just under 20%.
In this study, it is assumed that the quoted material strengths for axial load (tension and compression), bending and shear (in-plane and out-of-plane) are mean test result values, and do not include any design factors of safety, i.e. they are considered as failure stresses.
9

Assessment Methodology and Results
General: A rigorous and complete structural assessment of the TEMPSC was beyond the scope of this project. The objective of Phase 2 was to select a generic TEMPSC and, for identified potential failure events, to estimate the loads that would result in failure stresses. To achieve the study objectives, the adopted methodology is considered to be of sufficient accuracy.
For any level of analysis it is important to clearly note the assumptions and their bases. A number of assumptions were made to simplify the assessment procedure and to cover lack of data. These assumptions are discussed below.
The cross-sectional dimensions of the craft were described in Section 6 TEMPSC Configuration and Description of this report. From these dimensions and from the cross-section presented in Figure 3 it was assumed, for structural assessment purposes, that the cross-sectional form of the TEMPSC was circular. Therefore, a primary assumption was that circular ring analogy could be applied. A ring diameter of 2500 mm was assumed by taking the average of the vertical and horizontal diameters. Figure 2 confirms that the cross-sectional shape of the TEMPSC remains constant over a major proportion of its length. In many instances, the loadcases noted in Section 4, Design Events and Failure Capacities, describe local “concentrated” loading and so adoption of a “unit length” philosophy was entirely reasonable. In other cases where the true loading is applicable over a greater length, the calculations were performed on appropriate assumptions of loaded area and support conditions. These assumptions are presented in the following sections, where each loadcase is discussed separately.
It was assumed that the ring section exhibited uniform thickness although it is evident from Figure 3 and Table 1 that the shell thickness of the canopy is smaller than that of the hull section. Initially, the ring thickness was taken to be 11 mm for the hull section and 6.4 mm for the canopy section. Various thickness values were considered to determine the variation in results. For the hull section, the typical thickness of 11 mm gave stresses that were far too high in the SOLAS benchmark analyses (Loadcases 1 and 2). Therefore, it was considered that the additional material and fittings within the TEMPSC could act as to prevent deformation and redistribute stresses. Therefore, an effective thickness of 25 mm was taken for the hull section, however, the canopy section was not considered as strengthened and, consequently, the thickness retained at 6.4 mm.
Circular ring equations are presented in detail for a multitude of loading and support conditions in a textbook authored by W. C. Young (Reference 5). The mathematical solver MATHCAD was used to perform the ring analyses and the MATHCAD calculations for the Loadcases considered which, in general, involve superposition of two basic ring loading cases, are included at Appendix A.
A list of failure events is presented in Section 4, Design Events and Failure Capacities, of this report. Loadcases 1 and 2 relate to the SOLAS requirements for an impact test and a drop test, respectively. The results from structural assessments of these two load cases were used to provide a good indication of the validity of the adopted methodology.
For these two cases, there are verbal reports that following the two SOLAS tests slight damage to the TEMPSC occurs that needs to be repaired. Consequently, it was estimated that the strain must be beyond the initial damage at around 35% ultimate strain yet below the ultimate strain of the GRP. It was considered appropriate to take the maximum strain in the TEMPSC during the benchmarking tests at 50% of the ultimate strain (approximately 54% of the ultimate stress), although it should be noted that there has been no industry feedback to verify this assumption. This calibration check was used to refine the methodology and make adjustments to variables such as loading intensity and loading area for various cases.
10

Loadcase 1 – SOLAS Side Impact Test The integrity of the sidewall of the TEMPSC was determined from Loadcase 1 (see Figure 1a).
Impact against a flat rigid barrier was assumed to occur at a velocity of 3.5 m/s. This SOLAS case requires that impact occurs against a rigid barrier, and so it was necessary for the TEMPSC to absorb all of the impact energy.
The following methodology was applied to determine the stresses in the craft side wall:
1. It was assumed that the side impact test loading was resisted over a vessel length of 5000 mm. This length was taken from examination of Figure 2, which showed a uniform flat region of approximately 5000 mm that would resist the impact loading.
2. The impact energy was determined per unit length from KE = (0.5mv2)/5000, where:
o m is the mass of the fully loaded TEMPSC (= 7600 kg) including 50 personnel, equipment, etc.
o v is the impact velocity (= 3.5 m/s) o i.e. KE = 9.31 Nm per mm length.
3. Ring section properties were calculated per unit width of ring.
4. Load was applied to the ring section on the basis of unit width.
5. Maximum displacement under the application of load was determined using appropriate material mechanical properties for Young’s Modulus, Shear Modulus and Poisson’s ratio.
6. Tasks 1. to 5. were repeated for a range of loads.
7. From a load versus displacement plot, the work done for each load level was calculated. The load level that resulted in work done equalling the impact energy was subsequently determined.
8. For this loading condition the axial, bending and shear stresses in the ring section were found for comparison with the mean material strengths quoted in Table 2.
When the correct loading, section properties and analysis methodology are applied, it is expected that the maximum strains in the ring section should be around 50% of the ultimate strains. Basic parameters such as load patterns and section properties were varied to examine the sensitivity of the results to the various parameters. In the first instance it was noted that axial and shear stresses in the shell of the TEMPSC were low for this loading condition, and so the bending stresses alone governed the limits on load.
From the results noted in Table 3, it is seen that in the first instance (Loadcase 1a), a point load application was considered for both 11 mm and 25 mm section thicknesses. It was clear from the resulting deformations and stresses that the assumption of a point load application was too onerous, since the resulting stress was considerably in excess of the maximum allowable material stress. SOLAS requires the TEMPSC to be able to withstand this load condition suffering only minor damage and continue to be seaworthy.
Loadcase 1b was subsequently set up, this case representing the application of load onto the TEMPSC over a finite length of the circumference. A number of variations of the loaded arc length were considered, but a length of 250 mm either side of the centreline was considered appropriate (leading to a T value of 167.5°), since this length corresponded to a “flat” region in the crosssectional shape. The loading intensity, w, was altered such that the impact energy equated the work done in deforming the shell. By limiting the resulting strain to 50% of the ultimate strain
11

(H = 0.01 and V = 151 N/mm2), the results were compatible with the magnitude of the loading applied resulting from the impact.
Superposition of two ring loading cases was necessary to achieve the desired loading condition, as shown in Table 3. With reference to ring loading, the figures in Table 3 show that the total applied load for each ring case (W1 = 2SRw, for the first case and W2 = 2wRsinT for the second) was equated such that when combined, the effects of the point loading on the ring were cancelled. i.e. W1 = 2.S�1250.(0.00842) = 66.13 N per mm length
W2 = 2(0.1222).1250.sin(167.5) = 66.13 N per mm length
Energy absorbed = 0.5.W.G where G is the ovalising rather than denting displacement = 0.5.(66.13).(0.281) = 9.30 Nm per mm length
Therefore, the correct amount of energy has been expended in the impact test.
Loadcase 2 – SOLAS Drop Test Loadcase 2 (see Figure 1b) was designed to assess the ability of the TEMPSC to withstand a drop of 3.0 m into calm water.
The energy at impact was determined from the equation for potential energy, knowing the mass of the loaded TEMPSC (7600 kg, including the mass of 50 persons and equipment) and the drop height.
As for Loadcase 1, the loads were applied for a unit length of the craft, this time assuming that the full vessel length (8000 mm) of the TEMPSC resisted the impact with water. The impact energy was determined per unit length from PE = mgh/8000, i.e. PE = (7600).(9.81).(3.0)/8000 = 27.96 Nm per mm length.
It was also assumed that the drop energy was fully absorbed by the vessel, but the load applied to the TEMPSC accounted for the fact that the water would displace and that loading onto the TEMPSC would be applied over an arc of the ring. A loaded arc length of approximately 2500 mm (equivalent to T of 120° – see loading diagram in Table 3) was used to provide representation of arc loading. Superposition of load cases was necessary to achieve the desired loading condition. The results in Table 3 show a maximum bending stress level of 149 N/mm2, which is the equivalent to approximately 50% strain utilisation.
W = 2.S�1250.(0.01882) = 2(0.06827).1250.sin(120) = 147.8 N per mm length
Energy absorbed = 0.5.W.G where G is the ovalising rather than denting displacement = 0.5.(147.8).(0.377) = 27.86 Nm per mm length
Therefore, the correct amount of energy has been expended in the impact test.
Loadcase 3 – Impact Due to Wind Loading Impact of the TEMPSC onto a jacket tubular due to wind oscillatory action was studied in Loadcase 3 (see Figure 1c) which is similar in format to Loadcase 1.
The magnitude of loading that would cause structural failure of the TEMPSC was estimated assuming an impact onto a vertical 1000 mm diameter tubular. Although, in theory, such an impact would initially result in the application of a concentrated load onto the TEMPSC, it was considered more realistic to distribute the loading over a small region of the TEMPSC shell. From
12

large scale diagrams of the TEMPSC, it was estimated that a vertical loaded arc length of 200 mm either side of the TEMPSC centreline would be a reasonable loaded length. It was also assumed that the steel jacket tubular was significantly stiffer than the GRP TEMPSC, so the craft was assumed to absorb all of the impact energy.
The results of the assessment are described in Table 3. For a failure condition, the loading intensity, w, was increased until the resulting critical stress (bending) reached the GRP material strength (= 280 N/mm2).
Per unit length of the TEMPSC, a maximum load of 116 N was found to cause this condition, with an associated ovalising displacement of 0.542 m, i.e. an absorbed energy of 31.44 Nm per mm length (c.f. 9.3 Nm in the SOLAS impact test). Therefore, while the fully laden TEMPSC would impact a wall 5000 mm contact length at 6.4 m/s, it could only impact a 1.0 m diameter leg at 2.8 m/s (if all of the 1.0 m width was in contact).
Loadcase 4 – Impact Due to Vertical Drop Loadcase 4 (see Figure 1d) was similar to Loadcase 2, except in Loadcase 4 the vessel drop height was varied until failure stresses in the TEMPSC were reached.
The results in Table 3 indicate that the TEMPSC shell was able to carry a load of 280 N per mm length of craft with a maximum ovalising displacement of 0.773 m. This represents an energy of 108.2 Nm per mm length, equivalent to a drop height of 11.6 m on the assumption that the craft carried the drop energy over its entire length of 8000 mm for a fully laden TEMPSC, or 23 m drop height for an empty TEMPSC (3850 kg).
In practice, the initial impact would most likely occur at the stern, as the centre of gravity is aft of the mid-section, leading to a smaller damaged length and a lower possible drop height to avoid local structural failure.
Loadcase 5 – Davit Failure Due to Overload In Loadcase 5 (see Figure 1e), the TEMPSC was assumed being lowered from the davits. In this document, only failure of the hull section is estimated. Other potential failure components such as the davits themselves will be considered in phase 3.
The weight of the craft was increased until limiting bending were reached, to determine the load level for an overload condition. Shear stresses were also calculated, conservatively using half the cross-sectional area calculated in Table 1, but were not found to be critical despite the lower mean strength for shear as noted in Table 2.
In this loadcase, ring analyses were not appropriate and beam theory was used to determine the maximum bending moment in the craft, assuming simply supported conditions. The span (distance between davit support points) was taken as 7000 mm, as determined from a dimensioned drawing of the TEMPSC. Section properties for a typical amidships section were determined (see Table 1) and the maximum bending stress was calculated using the maximum bending moment and the minimum elastic modulus for the section.
Due to its smaller thickness, the canopy is the critical section. For a maximum allowable flexural stress in the canopy of 170 N/mm², the limiting force per unit length was calculated to be 558 N/mm, the equivalent of a total mass of 398,000 kg, uniformly distributed over the length of the TEMPSC.
Loadcase 6 – Failure Due to Hydrostatic Pressure Loadcase 6 (see Figure 1f) examined the ability of TEMPSC to resist hydrostatic pressure from a submergence condition.
13

Estimation was made of maximum hydrostatic pressure that caused failure stresses to be reached. A single ring load case, as shown in Table 3, represented the hydrostatic pressure. The thickness of the ring was defined as 6.4 mm for this case, representing the weakest submerged section, i.e. the canopy.
In the simple axial loadcase, Loadcase 6a, the resulting bending stresses were zero and the controlling condition was tangential stresses. Per unit length of the craft, a uniform load of w = 0.5118 N/mm was found to result in the limiting tensile stress of 100 N/mm2. This represented a hydrostatic head of 50.9 m.
A secondary analysis was performed to account for hoop compressive buckling. The characteristic buckling strength was calculated based on Norsok code requirements for unstiffened curved panels – Section 5.3 (Ref. 6). These were made with the assumption that the canopy was the weakest element forming a semi-circle radius 1250 mm and stiffened at the ends. The length of the canopy was taken to be 5000 mm and the material 30% CSM, see Table 2. From this calculation, the characteristic buckling strength was calculated to be 64 N/mm². Loadcase 6b applies this limiting stress and leads to the lower capacity of w = 0.3286 N/mm, representing a hydrostatic head of 32.7 m.
Loadcase 7 – Failure Due to Towing Load Against Bow-Wave Wave loading and potential submergence of TEMPSC during tow by a rescue vessel, were considered under Loadcase 7 (see Figure 1f). In this document, only failure of the hull bow section is estimated. Other potential failure components such as the tow connection will be considered in phase 3.
It has been assumed that the wave loading on the front of the TEMPSC would be limited to the hull, which has an idealised wall thickness equal to 25 mm. For simplicity, the limit of the hull in the ring analogy is taken to be at 90°.
The results in Table 3 indicate that the TEMPSC shell was able to carry a load of 1700 N per mm length of craft subjected to the bow-wave loading with an ovalising deformation = 0.387m, i.e. energy absorbed = 329 Nm per mm length.
Loadcase 8 - Impact with Leg Due to Wind/Wave/Current Loading Stern impact of TEMPSC with a jacket tubular was examined under Loadcase 8 (see Figure 1g).
The plan shape of the stern of the TEMPSC is circular and of similar diameter to TEMPSC crosssection, considered in earlier loadcases. Stern impact of the craft with a jacket tubular is therefore similar to the condition considered under Loadcase 3. The results of Loadcase 3 are therefore considered applicable to this condition.
14

7. Observations A total of the eight load scenarios were considered for the structural failure assessment of a davitlaunched, 8.0 m long, 50 person TEMPSC manufactured in accordance with the pre-1986 amendments to the 1974 SOLAS regulations. Two scenarios related to the SOLAS specifications and the remainder were selected in conjunction with HSE to be events most likely to cause failure during the launch and escape.
An assessment methodology was developed and calibrated using the results from the SOLASspecified cases. The assumptions adopted in the methodology related to the use of a ring analogy for structural assessment, shell thickness and load application/intensity. These were shown to be reasonable by the calibration exercise.
Condition Limiting Load
Impact jacket member due to wind 116 N per mm length and oscillatory actions
Dropped into water due to 280 N per mm length winch/hook failure or release
Davit overload 398,000 kg uniform over length of TEMPSC
Immersion in water 0.3286 N/mm per mm length
(upright/overturned) (equivalent to 32.7 m hydrostatic head)
Damage/submersion during towing 1700 N per mm length
Collision with jacket due to wave/current action following as for impact to jacket member
release
Limiting load intensities were estimated for each Loadcase. It was concluded from the results that the most onerous condition was that related to an impact of the TEMPSC with a jacket tubular, during the lowering operation. This result is not surprising since the assumption to apply a nearconcentrated load to the shell of a TEMPSC is close to reality and this loading scenario is onerous and leads to high local bending stresses for a small magnitude of applied load.
The results of this phase 2 of the project will enable the phase 3 work to proceed, enabling safety margins to be addressed and the likelihood of each failure event to be quantified for TEMPSC in the UK sector of the North Sea.
15

8. References
1. Health and Safety Executive, “TEMPSC Structural Design Basis Determination, Phase 1 – Input Data Capture and Review”, PAFA Consulting Engineers, C056-070-R Rev 1, August 2000.
2. Health and Safety Executive, “Offshore Evacuation by TEMPSC, Phase 2 Design Review”, ARK Safety, HSELR/030/2, October 1999.
3. Smith C. S., “Design of Marine Structures in Composite Materials”, Elsevier Science Publishers, 1990.
4. Johnson A. F., “Engineering Design Properties of GRP”, The British Plastics Federation, Publication No. 215/1.
5. Young Y. C., “ROARK’S Formulas for Stress and Strain”, 6th Edition, McGraw-Hill Book Co, ISBN 0-07-100373-8, 1989.
6. NORSOK Standard, “Design of Steel Structures. Annex B. Buckling Strength of Shells”, N-004, Draft 5, Rev. 1, June 1998.
16

Tables

Tab
le 1
8.
0m, 5
0 Pe
rson
TEM
PSC,
Stre
ngth
Cal
cula
tion
Shee
t 1
Com
pone
nt
Leng
th
Bre
adth
Ex
t In
t. Le
ver
Are
a A
rea
x 2n
d m
omen
t Ic
g N
otes
R
adiu
s R
adiu
s A
rm
Leve
r Arm
of
Are
a (m
m)
(mm
) (m
m)
(mm
) (m
m)
(mm
²) (m
m3 )
(mm
4 ) (m
m4 )
1 30
.0
19.0
2
30.0
10
.0
3 50
.0
20.0
4
45.0
25
.0
5 10
0.0
20.0
6
100.
0 10
.0
7 22
0.0
10.0
8 10
0.0
10.0
9
240.
0 5.
0
10
250.
0 5.
011
20
0.0
5.0
12
400.
0 5.
013
50
0.0
5.0
14
100.
0 5.
015
18
60.0
6.
416
14
0.0
6.4
17
65.0
6.
4
18
70.0
6.
419
19
0.0
11.0
20
11
50.0
11
.0
21
520.
0 11
.0
TOTA
L
9.5
570
5.42
E+0
3 4.
03E
+08
20.0
62
8 1.
26E
+04
4.33
E+0
8 A
rea
= 1/
4 of
the
circ
le
60.0
10
00
6.00
E+0
4 6.
24E
+08
2.08
E+0
5 90
.0
1100
9.
90E
+04
6.36
E+0
8 A
rea
= 1/
4 of
the
circ
le
110.
0 20
00
2.20
E+0
5 1.
10E
+09
140.
0 10
00
1.40
E+0
5 5.
04E
+08
250.
0 22
00
5.50
E+05
7.
93E
+08
8.87
E+0
6 36
0.0
1000
3.
60E
+05
2.40
E+0
8 36
0.0
1200
4.
32E
+05
2.88
E+0
8 48
0.0
1250
6.
00E+
05
1.71
E+0
8 6.
51E
+06
600.
0 10
00
6.00
E+05
6.
26E
+07
810.
0 20
00
1.62
E+06
3.
24E
+06
2.67
E+0
7 10
10.0
25
00
2.53
E+06
6.
38E
+07
1050
.0
500
5.25
E+0
5 2.
00E
+07
4.17
E+0
5 20
90.0
11
904
2.49
E+0
7 1.
83E
+10
4.43
E+0
8 C
urve
cha
nged
to e
quiv
alen
t fla
t 12
70.0
89
6 1.
14E
+06
1.58
E+0
8 1.
46E
+06
1190
.0
416
4.95
E+0
5 4.
80E
+07
1150
.0
448
5.15
E+0
5 4.
03E
+07
1.83
E+0
5 10
80.0
20
90
2.26
E+06
1.
10E
+08
6.29
E+0
6 50
0.0
1265
0 6.
33E
+06
1.55
E+0
9 4.
18E
+08
Cur
ve c
hang
ed to
equ
ival
ent f
lat
160.
0 57
20
9.15
E+05
2.
73E
+09
5207
2 4.
43E
+07
2.83
E+1
0 9.
12E
+08
Tota
l ine
rtia
2.92
E+1
0 m
m4
C o
f G a
bove
und
ersi
de o
f kee
l 85
0.2
mm
C
of G
bel
ow to
p of
can
opy
1449
.8
mm
S
ectio
n m
odul
us Z
for k
eel (
t = 1
1.0
mm
) 3.
43E
+07
mm
3
Sec
tion
mod
ulus
Z fo
r cov
er (t
= 6
.4 m
m)
2.01
E+0
7 m
m3

Table 2 Mechanical Properties of Glass Reinforced Plastic (GRP)
Mechanical Properties Units Chopped Woven Strand Mat Roving
Canopy Hull
% Fibre by weight % | 30% | 50%
Tensile strength Mpa 100 230
Flexural strength MPa 170 280
Compressive strength MPa 140 205
In-plane shear strength MPa 80 95
Interlaminar shear strength MPa 25 25
Tensile modulus GPa 7.8 15.8
Flexural modulus GPa 6.4 14.0
Shear modulus GPa 2.8 3.5
Poisons ratio - tension 0.42 0.125
Poisons ratio - comp. 0.32 0.125
Note:
Figures primarily based on References 3 and 4.

Tab
le 3
D
esig
n E
vent
s an
d A
naly
sis
Res
ults
Load
C
ase
Des
crip
tion
Rin
g A
naly
sis
Des
crip
tion
Var
iabl
e P
aram
eter
s M
axim
um
Bend
ing
Stre
ss
(N/m
m2 )
Lim
iting
Be
ndin
g St
ress
(N
/mm
2 )
Max
imum
E
last
ic
Def
’n
(mm
)
Not
es
t equi
v (m
m)
T��
(deg
) w
(N
/mm
)
1a
SO
LAS
Impa
ct T
est
– si
de im
pact
ont
o a
fixed
rigi
d ve
rtica
l su
rface
at a
n im
pact
ve
loci
ty o
f 3.5
m/s
, po
int l
oad
R =
125
0 m
m
11.0
25.0
n/a
n/a
0.00
157
0.00
842
183
191
280
280
1507
293
Poi
nt lo
ad a
ssum
ptio
n to
o on
erou
s. A
pply
load
ove
r a
finite
leng
th o
f rin
g.
1b
SO
LAS
Impa
ct T
est
– si
de im
pact
ont
o a
fixed
rigi
d ve
rtica
l su
rface
at a
n im
pact
ve
loci
ty o
f 3.5
m/s
, di
strib
uted
load
by
supe
rpos
ition
R =
125
0 m
m
+
25.0
25.0
n/a
167.
5
0.00
842
0.12
222
191 + -40 =
280
282
293
-12
W
= 2.S�
R.(0
.008
42)
= 2.
(0.1
222)
.R.s
in(T
) =
66.1
3 N
per
mm
leng
th
E
= 0.
5.(6
6.13
).(0.
281)
=
9.30
Nm
per
mm
leng
th
T�se
lect
ed b
y ex
amin
atio
n of
“fl
at” r
egio
n in
the
vici
nity
of
the
impa
ct z
one
(see
Fig
. 3)
Sele
cted
w a
nd T
val
ues
resu
lt in
a s
train
50%
of u
ltim
ate,
ie.
Util
isat
ion
Rat
io o
f 0.5
4.
25.0
16
7.5
151
282
281

Tab
le 3
con
tinu
ed
Des
ign
Eve
nts
and
Ana
lysi
s R
esul
ts
Load
C
ase
Des
crip
tion
Rin
g A
naly
sis
Des
crip
tion
Var
iabl
e P
aram
eter
s M
axim
um
Bend
ing
Stre
ss
(N/m
m2 )
Lim
iting
Be
ndin
g St
ress
(N
/mm
2 )
Max
imum
E
last
ic
Def
’n
(mm
)
Not
es
t equi
v (m
m)
T��
(deg
) w
(N
/mm
)
2
SO
LAS
Dro
p Te
st –
dr
op in
to c
alm
wat
er
in fu
lly la
den
cond
ition
from
a
heig
ht o
f 3.0
m
R =
125
0 m
m
+
25.0
25.0
n/a
120
0.01
882
0.06
827
426 + -2
77
=
280
280
652
-275
W
= 2.S�
R.(0
.018
82)
=
2.(0
.068
27).R
.sin
(T)
=
147.
8 N
per
mm
leng
th
E
= 0.
5.(1
47.8
).(0.
377)
=
27.9
Nm
per
mm
leng
th
T se
lect
ed to
be
120°
or
appr
oxim
atel
y 25
00 m
m to
ac
coun
t for
wat
er
disp
lace
men
t
Sele
cted
w a
nd T
val
ues
resu
lt in
a s
train
50%
of u
ltim
ate,
ie.
Util
isat
ion
Rat
io o
f 0.5
3.
25.0
12
0 -
149
280
377

7
Tab
le 3
con
tinu
ed
Des
ign
Eve
nts
and
Ana
lysi
s R
esul
ts
Load
C
ase
Des
crip
tion
Rin
g A
naly
sis
Des
crip
tion
Var
iabl
e P
aram
eter
s M
axim
um
Bend
ing
Stre
ss
(N/m
m2 )
Lim
iting
Be
ndin
g St
ress
(N
/mm
2 )
Max
imum
E
last
ic
Def
’n
(mm
)
Not
es
t equi
v (m
m)
T��
(deg
) w
(N
/mm
)
3
Hul
l im
pact
ont
o a
tubu
lar m
embe
r of
1.0
m d
iam
eter
due
to
win
d an
d os
cilla
tory
act
ions
R =
125
0 m
m
+
25.0
25.0
n/a
170.
8
0.01
477
0.29
000
335 + -53 =
280
280
554
12
W
= 2.S�
R.(0
.014
77)
=
2.(0
.290
0).R
.sin
(T)
= 11
6 N
per
mm
leng
th
E
= 0.
5.(1
16).(
0.54
2)
= 31
.4 N
m p
er m
m le
ngth
T de
term
ined
from
an
assu
med
load
ed le
ngth
of 4
00
mm
(200
mm
eith
er s
ide
of th
e ce
ntre
line)
Sele
cted
w a
nd T
val
ues
resu
lt in
a s
train
100
% o
f ulti
mat
e, ie
. U
tilis
atio
n R
atio
of 1
.0.
25.0
17
0.8
-28
2 28
0 54
2

Tab
le 3
con
tinu
ed
Des
ign
Eve
nts
and
Ana
lysi
s R
esul
ts
t (mm
) (
w
(
i
(N/m
m2 )
iting
in
g
(N/m
m2 )
Max
imum
ic
(mm
)
4 i
/+
n/a
120
120
-
802 + = 278
280
280
280
773
W
= 2.S�
) T)
E
)
Ti
l
disp
l
Tin
a s
train
100
% o
f ulti
mat
e, ie
.
Var
iabl
e P
aram
eter
s Lo
ad
Cas
e D
escr
iptio
n R
ing
Ana
lysi
s D
escr
iptio
n eq
uiv
T��
deg)
N
/mm
)
Max
imum
Be
ndng
St
ress
Lim
Bend
Stre
ss
Ela
stD
ef’n
N
otes
Dro
pped
into
wat
er
due
to w
nch
hook
fa
ilure
or r
elea
se
R =
125
0 m
m
25.0
25.0
25.0
0.03
565
0.12
940
-524
1337
-564
R.(0
.035
65 =
2.(0
.129
4).R
.sin
(=
280
N p
er m
m le
ngth
= 0
.5.(2
80).(
0.77
3=
108
Nm
per
mm
leng
th
sel
ecte
d to
be
120°
or
appr
oxm
ate
y 25
00 m
m to
ac
coun
t for
wat
er
acem
ent
Sele
cted
w a
nd
val
ues
resu
lt
Util
isat
ion
Rat
io o
f 1.0
.

Tab
le 3
con
tinu
ed
Des
ign
Eve
nts
and
Ana
lysi
s R
esul
ts
Load
C
ase
Des
crip
tion
Rin
g A
naly
sis
Des
crip
tion
Var
iabl
e P
aram
eter
s M
axim
um
Bend
ing
Stre
ss
(N/m
m2 )
Lim
iting
Be
ndin
g St
ress
(N
/mm
2 )
Max
imum
E
last
ic
Def
’n
(mm
)
Not
es
t equi
v (m
m)
T��
(deg
) w
(N
/mm
)
5 D
avit
over
load
C
alcu
latio
ns p
erfo
rmed
usi
ng s
impl
e be
am th
eory
– s
ee T
able
2
6a
6b
Hyd
rost
atic
pre
ssur
e fro
m im
mer
sion
in
wat
er –
axi
al s
tress
Hyd
rost
atic
pre
ssur
e fro
m im
mer
sion
in
wat
er –
com
pres
sive
ho
op b
uckl
ing
stre
ss
R =
125
0 m
m
R =
125
0 m
m
6.4
6.4
0 0
0.51
18
0.32
86
Axi
al
Stre
ss
=100
N
/mm
2
Com
p.
Hoo
p St
ress
=6
4.2
N/m
m2
Lim
iting
A
xial
St
ress
=
100
N/m
m2
Lim
iting
A
xial
St
ress
=
64.2
N
/mm
2
20
13
Ben
ding
stre
ss n
ot c
ritic
al.
Failu
re s
tress
es re
ache
d w
hen
TEM
PS
C s
ubm
erge
nce
is
50.9
m.
Ben
ding
stre
ss n
ot c
ritic
al.
Failu
re s
tress
es re
ache
d w
hen
TEM
PS
C s
ubm
erge
nce
is
32.7
m.

Tab
le 3
con
tinu
ed
Des
ign
Eve
nts
and
Ana
lysi
s R
esul
ts
tiv
(m
m)
T��
w
(N/m
m)
ing
(N/m
m2 )
iting
in
g
(N/m
m2 )
ic
(mm
)
7 in
g
+
90
n/a
90
- -
+ = 279
280
280
280
387
W
(T)
E)
Ti
Tin
a s
train
100
% o
f ulti
mat
e, ie
.
8 ith
Var
iabl
e P
aram
eter
s Lo
ad
Cas
e D
escr
iptio
n R
ing
Ana
lysi
s D
escr
iptio
n eq
u(d
eg)
Max
imum
Be
ndSt
ress
Lim
Bend
Stre
ss
Max
imum
E
last
Def
’n
Not
es
Dam
age/
subm
ersi
on
durin
g to
w
R =
125
0 m
m
25.0
25.0
25.0
0.68
00
2110
-183
1
8508
-812
1
= 2.
(0.6
800)
.R.s
in=
1700
N p
er m
m le
ngth
= 0
.5.(1
700)
.(0.3
87=
108
Nm
per
mm
leng
th
sel
ecte
d to
be
90°
to a
ccou
nt
for w
ater
dsp
lace
men
t
Sele
cted
w a
nd
val
ues
resu
lt
Util
isat
ion
Rat
io o
f 1.0
.
Ste
rn im
pact
wja
cket
tubu
lar
See
Load
case
3

Figures

Figure 1
Design Events a b
c d
e f
G h
/s
x m
x m
w
3.5m
3.0m
1.0 m diam.

Figu
re 2
T
ypic
al L
ayou
t of
Pre
-198
6, 8
.0m
, 50
Per
son
TE
MP
SC

Figure 3 8.0m, 50 person TEMPSC, Strength Calculation Sheet 2

Stre
ss
Figure 4 Idealised tensile stress-strain curve for WR GRP laminate
(from Smith, ref. 3)
300
250
200
150
100
50
0 0.0000 0.0025 0.0050 0.0075 0.0100 0.0125 0.0150 0.0175 0.0200
Strain
Fl iexural behaviour Tensile behav our
Figure 5 Stress-strain curves used in this assessment

APPENDIX A
MATHCAD Calculation Sheets.

APPENDIX A1
Loadcase 1 – SOLAS Impact Test.

Notation file
Enter dimensions of cross section
Conditions
Geometry of cross section
Load Case 1(b1) - Impact Test, 3.5m/s distributed load, t = 25.0mm
Roark case 15
Loading
Solid rectangular section
Provides a description of Table 17 and the notation used.
Radius of curvature measured to centroid of section: R 1250 mm
*
Height of rectangular section: d 25 mm
�Width of rectangular section: b 1 mm
If R/d > 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R R50 thin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d
Half-height: n d
n 13 mm 2

Shape constant for rectangle: F 6
See article 7.10 on page 201 5 in Roark.
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia unless additional support conditions are provided as discussed on page 260 in Roark :
�b d3
1 103 4I c I c mm 12
Area:
�A b d A 25 2 mm
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side (Vi) to unit stress ( V) in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V).iko is the ratio of actual stress in extreme fiber on the convex side (Vo) to unit stress ( V) in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V).
h1
k i1 � n
k i 1 �3 h R
1 n n
h1
k o 1 �
� n k o 1
3 h R 1
n n
�Enter properties and Modulus of elasticity: E newton
15100 loading of ring mm2
Poissons ratio: Q 0.125
Load: w newton�0.00842
mm
Modulus of rigidity: G newton�3500
2 mm

Constants Hoop-stress deformation factor:
3.33 10 5D
h � thick thin � I c
D R A R2�
Transverse radial shear deformation factor:
�h �
F E� I c 1.73 10 4�E 2 F� ( 1 Q ) � � thick thin E
�R G A � R2
Hoop-stress corrections:
k 1 1 D E k 1 1
1 D k 2 1
Computational constants:
I cK T
k 2
1 �A R2
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � �angle( x ) x � ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )
Initial conditions Loading terms:
w� R2 � x �LT M( )x angle( ) z ( )x K T� ( u x( ) 1 )
� � x � z xLT N( )x w R angle( ) ( )
� � x � u xLT V( )x w R angle( ) ( )
Values at A and/or C of moment (M), tangential force (N) and radial force (V):
K T 1 � E � � �w R2 k 2 0.5 newton mm
k 1
K T 1 � E
M A M A
�� �w R2 0.5 newton mm k 1
M C k 2 M C
�K T 1 k 2�w R� 0.5 newton k 1
V A
N A N A
0 newton � V A newton

�General formulas x 0 deg � � 1 deg � �� 360 deg for internal moment and forces M x � x � � z x( ) M A N A R� ( 1 u( ) ) V A R ( ) LT M( )x
N x( ) N A u x� ( ) V A z x� ( ) LT N( )x
V x( ) N A z x� ( ) V A u x� ( ) LT V( )x
Graphing preparations
Set up vector of moments to plot: i 0 �� 360 �M( i deg)
MMi (20000 min MM )M min�lbf in
� � � �MXi MMi � cos ( 90 deg i deg) MMi
� sin 90 deg i deg)(M min MYi M min
Set up vector of radial forces to plot: �N( i deg)
NNi (20000 min NN)N minlbf
� � � �NXi NNi � cos ( 90 deg i deg) NNi
� sin 90 deg i deg)(N min NYi N min
Set up vector of tangential forces to plot:
�V( i deg)VVi (20000 min VV )V minlbf
VXi VVi V min � cos ( 90 deg � � i deg ) VYi VVi V min
� sin 90 deg �( � i deg )
MM MM
NN NN
VV VV
For solid cross Change in horizontal diameter (an increase is positive): section
� k 1� Sw R3
� k 2� S �2 k 2
2D H E A� � h 2
D H 449 mm
Change in vertical diameter (an increase is positive):
k 1 S 2�
w� R3 � �D V E A� � h 4
2 k 22
D V mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):

� �3 k 1 S 2 k 2
� Sw� R3
k 22�' L 1 K T 1 � D
�E A� h 16 2
' L 293 mm
Graphs of moment The following pages present the plots of internal moment and forces and forces in standard graphs.
Graph of internal moment versus angle x:
2 104
1 104
M x ( )
newton mm�
1 104
0 90 180 270
x
deg
� � ( � �M 0 deg) 6578( newton mm N 0 deg) 5 (newton V 0 deg) 0 newton � � ( � �M 15 deg) 5910( newton mm N 15 deg) 4 (newton V 15 deg) 4 newton � � ( � �M 30 deg) 4015( newton mm N 30 deg) 2 (newton V 30 deg) 7 newton � � ( � �M 45 deg) 1198( newton mm N 45 deg) 2 (newton V 45 deg) 10 newton � � ( � �M 60 deg) 2065( newton mm N 60 deg) 7 (newton V 60 deg) 10 newton � � ( � �M 75 deg) 5181( newton mm N 75 deg) 12 newton V 75 deg) 9( newton � � ( � �M 90 deg) 7510( newton mm N 90 deg) 17 newton V 90 deg) 5( newton � � ( � �M 105 deg) 8430( newton mmN 105 deg) 20 newtonV 105 deg) 0( newton � � ( � �M 120 deg) 7418( newton mmN 120 deg) 22 newtonV 120 deg) 6( newton � � ( � �M 135 deg) 4112( newton mmN 135 deg) 21 newtonV 135 deg) 14( newton � � ( � �M 150 deg) 1631( newton mm N 150 deg) 18 newtonV 150 deg) 21( newton � 1 10 �M 165 deg)( � N 165 deg) 134 newton mm( � newtonV 165 deg) 28( newton � 2 10 �M 180 deg)( � N 180 deg) 54 newton mm ( � (newton V 180 deg) 33 newton
1 10
1631 newton mm
4� � �M 195 deg)( newton mm (� N 195 deg) 13 newtonV 195 deg)( 28 newton � �M 210 deg)( � � N 210 deg) 18( newtonV 210 deg)( 21 newton
� � ( � �M 225 deg) 4112( newton mmN 225 deg) 21 newtonV 225 deg)( � � ( � �M 240 deg) 7418( newton mmN 240 deg) 22 newtonV 240 deg)(
14 newton
6 newton � � ( �M 255 deg) 8430( newton mmN 255 deg) 20 newton �( )V 255 deg 0 newton � � ( � �M 270 deg) 7510( newton mmN 270 deg) 17 newtonV 270 deg) 5( newton � � ( � �M 285 deg) 5181( newton mmN 285 deg) 12 newtonV 285 deg) 9( newton � � ( � �M 300 deg) 2065( newton mmN 300 deg) 7 (newton V 300 deg) 10 newton
360

� � ( � �M 315 deg) 1198( newton mm N 315 deg) 2 newton V 315 deg) 10( newton � � ( � �M 330 deg) 4015( newton mm N 330 deg) 2 (newton V 330 deg) 7 newton � � ( � �M 345 deg) 5910( newton mm N 345 deg) 4 (newton V 345 deg) 4 newton � � ( � �M 360 deg) 6578( newton mm N 360 deg) 5 (newton V 360 deg) 0 newton
At A, At B,
� � ( � �M 0 deg) 6578( newton mm M 90 deg) 7510 newton mm
At C, At D,
� 2 10 � �M 180 deg)( 4 � (newton mm M 270 deg) 7510 newton mm
Maximum internal moment: Minimum internal moment:
2 10 �max( MM ) � lbf� in 4 � (newton mm min MM ) � lbf� in 8430 newton mm
Graph of tangential force versus angle x:
10
0
N x( ) 10
newton
20
30 0 90 180 270
x
deg
At A, At B, � �N 0 deg) 5( (newton N 90 deg) 17 newton
At C, At D,
� �N 180 deg) 5( (newton N 270 deg) 17 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 5 (newton min NN) � lbf 22 newton
360

Graph of radial force versus angle x:
40
20
V x ( )
newton
0
20 0 90 180 270
x
deg
At A, At B,
� �V 0 deg) 0( (newton V 90 deg) 5 newton
At C, At D,
� �V 180 deg) 33( (newton V 270 deg) 5 newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 33 (newton min VV ) � lbf 10 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is the distance from the centroidal axis to the innermost fiber.
n i n n i 13 mm
no is thedistance from the centroidal axis to the outermost fiber.
d n i n o 13 mmn o
The moment of largest magnitude is
�M max MM � lbf� in
max
max MM min MM ���
�� min MM � lbf� in MM � min MM
4 �M 2 10 newton mm
The flexure formula yields the stresses if the beam were straight
�M n i newtonV i V i 189
I c 2 mm
360

�M n o newtonV o V o 189
2I c mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 191 2 mm
The flexure stress experienced by the extreme outermost fiber on the convex side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 188 2 mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n1 differ in value. There are also stresses due to the tangential force N to be considered.
�Load 2 � S � R w Load 66.13 newton
� � �Workdone 0.5 Load ' L Workdone 9.68 newton m
Displacement ' L Displacement 293 mm

Notation file
Enter dimensions of cross section
Conditions
Geometry of cross section
Load Case 1(b2) - Impact Test,3.5m/s distributed load,
t = 25.0mm Roark case 8
Loading
Solid rectangular section
Provides a description of Table 17 and the notation used.
Radius of curvature measured to centroid of section: R �1250 mm
�Height of rectangular section: d 25 mm
�Width of rectangular section: b 1 mm
If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R R50 thin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d
Half-height: n d
n 13 mm 2

Shape constant for rectangle 6 (See article 7.10 on page 201 in F
5 Roark):
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia unless additional support conditions are provided as discussed on page 260 in Roark :
� mm
b d3
I c 1302 4I c 12
Area:
�A b d A 25 2 mm
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side (Vi) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V�.i
k is the ratio of actual stress in extreme fiber on the convex sideo(Vo) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V�.
h1
k i 1 � n
k i 1 �3 h R
1 n n
h1
k o 1 � n
k o 1 �3 h R
1 n n

�Enter properties and Angle: T 167.5 deg loading of ring
�Modulus of elasticity: E newton
15100 2 mm
Poisson's ratio: Q .125
newton�Load: w 0.12222 mm
Modulus of rigidity: newton�G 3500 2 mm
Constants Hoop-stress deformation factor:
h � I c 5
D � thick thin D 3.33 10 R A R2�
Transverse radial shear deformation factor:
� �h �
F E I c 4� � �E 2 F ( 1 Q ) � thick thin E 1.73 10 �R G A � R2
Hoop-stress corrections:
1 D E k 1 1k 1
1 D k 2 1k 2
Computational constants:
s sin T( )
c cos ( )T
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � � �angle( x ) x ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )

Initial conditions Loading terms:
w� R2
LT M( x ) ( angle( ) ! T ) ( ) s )2 x � � ( z x2
LT N( x ) x � � ( ) � ( z x( angle( ) ! T ) � w R z x ( ) s )
LT V( x ) x � � ( ) � ( z x( angle( ) ! T ) � w R u x ( ) s )
Values at A and/or C of moment (M), tangential force (N) and radial force (V):
�w R2 � s c� T 2 � T
2 s�2� sS 0.5 s k 2� ( 2 s� s c� S T )
2 M A 2 � S 3
�M A 102 newton mm
w� R2 �S s c� T� T � s2 2 s3
k 2� ( 2 s� s c� S T )
2 2 2 3 M C 2 � S
�M C 4165 newton mm
� �w R s3
N A 3 � SN A 0 newton
0 lbf � V A 0 newton V A
�General formulas x 0 deg � � 1 deg � �� 360 deg for internal moment and forces � x � � z xM x( ) M A N A R� ( 1 u( ) ) V A R ( ) LT M( )x
N x( ) N A u x� ( ) V A z x� ( ) LT N( )x
V x( ) N A z x� ( ) V A u x� ( ) LT V( )x
Graphing preparations
Set up vector of moments to plot: i 0 �� 360
�M( i deg)MMi (20000 min MM )M min�lbf in
� � � �MXi MMi � cos ( 90 deg i deg) MMi
� sin 90 deg i deg)(M min MYi M min

Set up vector of radial forces to plot:
�N( i deg)NNi (20000 min NN)N minlbf
� � � �NXi NNi � cos ( 90 deg i deg) NNi
� sin 90 deg i deg)(N min NYi N min
Set up vector of tangential forces to plot:
�V( i deg)VVi (20000 min VV )V minlbf
� � � �VXi VVi � cos ( 90 deg i deg) VVi
� sin 90 deg i deg)(V min VYi V min
MM MM
NN NN
VV VV
For solid cross Change in horizontal diameter (an increase is positive): section
k 1� S � s3
w� R4
2 � T 2� k 2
� S 2 � S � s2 � s �T s c� 2 k 22 � ( 2 s� s c� S T )D H 2 E� � I c
� S 3
D H
Change in vertical diameter (an increase is positive):
9 mm
�w R4 � 2 c
k 1� S � S � s T � s c
3
���D V 2 E� � I c � S 3 3
� s �2 � T� k 2� S � c2 s c� T
2 2 k 22 � ( 2 s� s c� S T )
D V 15 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):
3 3� �w R4 � 2 s2 1 S � s � c � �
32 � s
c s� � s2 � S k 1 ' L S � ( S T ) S c T ��� �4 E� I c
� S 2 2 3 3 � S
2 � T 2� s c� � s �� k 2 S T 2 s� � S S
2 S T� S � s � c 2 k 2
2 � ( 2 s� s c� S T )
' L 12 mm

Graphs of moment The following pages present the plots of internal moment and forces and forces in standard graphs.
Graph of internal moment versus angle x:
2000
400
1200M x( )
newton mm� 2800
4400
60000 90 180 270
x
deg
� � ( � �M 0 deg) 102( newton mm N 0 deg) 0 (newton V 0 deg) 0 newton � � ( � �M 15 deg) 95( newton mm N 15 deg) 0 (newton V 15 deg) 0 newton � � ( � �M 30 deg) 75( newton mm N 30 deg) 0 (newton V 30 deg) 0 newton � � ( � �M 45 deg) 42( newton mm N 45 deg) 0 (newton V 45 deg) 0 newton � � ( � �M 60 deg) 0( newton mm N 60 deg) 0 (newton V 60 deg) 0 newton � � ( � �M 75 deg) 50( newton mm N 75 deg) 0 (newton V 75 deg) 0 newton � � ( � �M 90 deg) 103( newton mm N 90 deg) 0 (newton V 90 deg) 0 newton � � ( � �M 105 deg) 156( newton mm N 105 deg) 0 (newton V 105 deg) 0 newton � � ( � �M 120 deg) 206( newton mm N 120 deg) 0 (newton V 120 deg) 0 newton � � ( � �M 135 deg) 248( newton mm N 135 deg) 0 (newton V 135 deg) 0 newton � � ( � �M 150 deg) 281( newton mm N 150 deg) 0 (newton V 150 deg) 0 newton � � ( � �M 165 deg) 301( newton mm N 165 deg) 0 (newton V 165 deg) 0 newton � � ( � �M 180 deg) 4165( newton mm N 180 deg) 0 (newton V 180 deg) 33 newton � � ( � �M 195 deg) 301( newton mm N 195 deg) 0 (newton V 195 deg) 0 newton � � ( � �M 210 deg) 281( newton mm N 210 deg) 0 (newton V 210 deg) 0 newton � � ( � �M 225 deg) 248( newton mm N 225 deg) 0 (newton V 225 deg) 0 newton � � ( � �M 240 deg) 206( newton mm N 240 deg) 0 (newton V 240 deg) 0 newton � � ( � �M 255 deg) 156( newton mm N 255 deg) 0 (newton V 255 deg) 0 newton � � ( � �M 270 deg) 103( newton mm N 270 deg) 0 (newton V 270 deg) 0 newton � � ( � �M 285 deg) 50( newton mm N 285 deg) 0 (newton V 285 deg) 0 newton � � ( � �M 300 deg) 0( newton mm N 300 deg) 0 (newton V 300 deg) 0 newton � � ( � �M 315 deg) 42( newton mm N 315 deg) 0 (newton V 315 deg) 0 newton � � ( � �M 330 deg) 75( newton mm N 330 deg) 0 (newton V 330 deg) 0 newton � � ( � �M 345 deg) 95( newton mm N 345 deg) 0 (newton V 345 deg) 0 newton � � ( � �M 360 deg) 102( newton mm N 360 deg) 0 (newton V 360 deg) 0 newton
360

At A, At B,
� � ( � �M 0 deg) 102( newton mm M 90 deg) 103 newton mm
At C, At D,
� � ( � �M 180 deg) 4165( newton mm M 270 deg) 103
Maximum internal moment:
�
newton mm
Minimum internal moment:
( �max( MM ) � lbf� in 303 newton mm min MM ) � lbf� in 4165 newton mm
Graph of tangential force versus angle x:
2
1
N x ( )
newton
0
1 0 90 180 270
x
deg
At A, At B,
� �N 0 deg) 0( (newton N 90 deg) 0 newton
At C, At D,
� �N 180 deg) 0( (newton N 270 deg) 0 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 2 (newton min NN) � lbf 0 newton
360

Graph of radial force versus angle x:
10
0
10V x( )
newton20
30
400 50 100 150 200 250 300 350
x
deg
At A, At B,
� �V 0 deg) 0( (newton V 90 deg) 0 newton
At C, At D,
� �V 180 deg) 33( (newton V 270 deg) 0 newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 0 (newton min VV ) � lbf 33 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is the distance from the centroidal axis to the innermost fiber.
n i n n i 13 mm
no is the distance from the centroidal axis to the outermost fiber.
n d n i n 13 mmo o
The moment of largest magnitude is
�M max MM � lbf� in
max
max MM min MM ���
�� min MM � lbf� in MM � min MM
�M 4165 newton mm
The flexure formula yields the stresses if the beam were straight

�M n i newtonV i V i 40
2I c mm
�M n o newtonV o V o 40
2I c mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 40 2 mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 40 2mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n 1 differ in value. There are also stresses due to the tangential force N to be considered.
� � ( ) � wLoad 2 R sin T Load 66.13 newton
� � �Workdone 0.5 Load ' L Workdone 0.38 newton m
Displacement ' L Displacement 12 mm

APPENDIX A2
Loadcase 2 – SOLAS Drop Test.

Case 2(b1) Circular Ring with Solid Rectangular Section and Loading as Shown Below
Loading
Solid rectangular section
Notation file Provides a description of Table 17 and the notation used.
Enter dimensions of Radius of curvature measured cross section to centroid of section: R 1250 mm
Height of rectangular section: d 25 mm
Width of rectangular section: b 1� mm
Conditions If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R Rthin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d

Geometry of Half-height: n d n 13 mm cross section 2
Shape constant for rectangle: F 6
See article 7.10 on page 201 5 in Roark.
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia unless additional support conditions are provided as discussed on page 260 in Roark :
�b d3
I c 1 103 mmI c12
Area:
�A b d A 25 mm 2
Distance from centroidal axis to neutral axis measured toward center of curvature:
I ch
R 2 n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side (Vi) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V�.iko is the ratio of actual stress in extreme fiber on the convex side (Vo) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V�.
h1
k i 1 � n
k i 1 3� h R
1 n n
h1
1 � n k o 1
3� h R k o
1 n n
4

15150 newton�Enter properties and Modulus of elasticity: E loading of ring mm2
Poissons ratio: Q 0.125
newton�Load: w 0.01882 mm
�Modulus of rigidity: G newton
3500 2 mm
Constants Hoop-stress deformation factor:
h � I c
D � thick thin D 3.33 10 5 R A R2�
Transverse radial shear deformation factor:
� �h �
F E I cE 2� F � ( 1 Q ) � � thick thin E 1.73 10 4
�R G A � R2
Hoop-stress corrections:
1 D E k 1 1k 1
1 D k 2 1k 2
Computational constants:
I cK T 1
�A R2
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
�angle( )x x ( x 180� deg) ( 360� deg x ) � ( x ! 180� deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )
Initial conditions Loading terms:
w� R2 � � xLT M( )x angle x( ) z ( ) K T� ( u x( ) 1 )
LT N( )x w� R� angle( ) ( )x � z x
LT V( )x w� R� angle( ) ( )x � u x

Values at A and/or C of moment (M), tangential force (N) and radial force (V):
K T 1 � E � � �w R2 k 2 0.5 1 104 newton mm M A M Ak 1
K T 1 � E � � 4 104 �w R2 0.5 newton mm M C k 2 M Ck 1
�K T 1 k 2�w R� 0.5 N A 12 newtonN A k 1 �0 newton V A 0 newtonV A
� � �General formulas x 0 deg � 1 deg �� 360 deg for internal moment and forces � � z xM x( ) � ( ) )M A N A R� ( 1 u x V A R ( ) LT M( )x
N x( ) N A u x� ( ) V A z x� ( ) LT N( )x
V x( ) N A z x� ( ) V A u x� ( ) LT V( )x

Graphing preparations
Set up vector of moments to plot: i 0 �� 360
MMi M i � deg( )
lbf in � M min 20000 min MM ( )
MXi MMi M min cos 90� deg(� i � deg) MYi MMi M min sin 90� deg(� i � deg)
Set up vector of radial forces to plot:
NNi N i � deg( )
lbf N min 20000 min NN ( )
NXi NNi N min cos 90� deg(� i � deg ) NYi NNi N min sin 90� deg(� i � deg )
Set up vector of tangential forces to plot:
VVi V i � deg( )
lbf V min 20000 min VV ( )
VXi VVi V min cos 90� deg(� i � deg ) VYi VVi V min sin 90� deg(� i � deg )
Set up radial lines in polar graph: j 0 48 ��
M max max max MM( )
20000 N max max
max NN( )
20000 V max max
max VV( )
20000
MXP2 j� 0 MXP2 j� 1 3 M� max cos 15 j� � deg( )�
MYP2 j� 0 MYP2 j� 1 3 M max � sin 15 j� � deg( )�
NXP2 j� 0 NXP2 j� 1 3 N max � cos 15 j� � deg( )�
NYP2 j� 0 NYP2 j� 1 3 N� max sin 15 j� � deg( )�
VXP2 j� 0 VXP2 j� 1 3 V� max cos 15 j� � deg( )�
VYP2 j� 0 VYP2 j� 1 3 V� max sin 15 j� � deg( )�
MM MM
NN NN
VV VV

For solid cross Change in horizontal diameter (an increase is positive): section
� k 1� Sw R3
� k 2� S 2 k 2
2�D H E A� � h 2
D H 1000 mm
Change in vertical diameter (an increase is positive):
k 1 S 2� w� R3
2 k 2 2� �D V E A� � h 4
D V 1090 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):
2
' L w� R3
E A� h� � 1
3 k 1� � S
16
k 2� S
2 k 2
2 K T 1 � D
' L 652 mm
Graphs of moment The following pages present the plots of internal moment and forces and forces in both polar and standard graphs. The vectors necessary for
formatting the polar plots are presented past the right margin.
Above is the graph of internal moment, M, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the internal moment at the corresponding angle. The thin circular curve shows the zero moment curve; inside the curve corresponds to positive moment (inward direction), and outside the curve corresponds to a negative moment (outward direction).

360
Graph of internal moment versus angle x:
45 10
M x( ) �newton mm
45 10
0 90 180 270
�2 104 newton mm
�2 104 newton mm
At A,
M( 0� deg)
At C,
M( 180� deg)
x
deg
1 104 newton mm �
At B,
M 90� deg( )
4 104 newton mm �
At D,
M 270� deg( )
Maximum internal moment: Minimum internal moment:
max MM( ) � lbf� in 4 104 newton mm � min MM ( ) � lbf� in 2 104 newton mm �
Above is the graph of the tangential force, N, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the tangential force at the corresponding angle. The thin circular curve shows the zero force curve; inside the curve corresponds to positive force (inward direction), and outside the curve corresponds to a negative force (outward direction).

1 104
1 104 �M( 0� deg) newton mm N( 0� deg) 12 newton V( 0� deg) 0 newton �M( 15� deg) newton mmN( 15� deg) 10 newton V( 15� deg) 9 newton
�M( 30� deg) 8973 newton mm N( 30� deg) 4 newton V( 30� deg) 17 newton �M( 45� deg) 2678 newton mm N( 45� deg) 5 newton V( 45� deg) 21 newton �M( 60� deg) 4615 newton mm N( 60� deg) 15 newton V( 60� deg) 23 newton
M( 75� deg) 1 104 newton mm � N( 75� deg) 27 newton V( 75� deg) 19 newton
2 104
2 104 �M( 90� deg) newton mmN 90 deg�( ) 37 newton V( 90� deg) 12 newton
M( 105� deg) newton mm � N( 105� deg) 45 newton V( 105� deg) 0 newton
M( 120� deg) 2 104 newton mm � N( 120� deg) 49 newton V( 120� deg) 14 newton �M( 135� deg) 9191 newton mmN( 135� deg) 48 newton V( 135� deg) 31 newton
�M( 150� deg) 3646 newton mm N( 150� deg) 41 newton V( 150� deg) 47 newton
M( 165� deg) 2 104 newton mm � N( 165� deg) 29 newton V( 165� deg) 62 newton
M( 180� deg) 4 104 newton mm � N( 180� deg) 12 newton V( 180� deg) 74 newton
M( 195� deg) 2 104 newton mm � N( 195� deg) 29 newton V( 195� deg) 62 newton �M( 210� deg) 3646 newton mm N( 210� deg) 41 newton V( 210� deg) 47 newton �M( 225� deg) 9191 newton mmN( 225� deg) 48 newton V( 225� deg) 31 newton
M( 240� deg) 2 104 newton mm � N( 240� deg) 49 newton V( 240� deg) 14 newton
M( 255� deg) 2 104 newton mm � N( 255� deg) 45 newton V( 255� deg) 0 newton
M( 270� deg) 2 104 newton mm � N( 270� deg) 37 newton V( 270� deg) 12 newton
M( 285� deg) 1 104 newton mm � N( 285� deg) 27 newton V( 285� deg) 19 newton �M( 300� deg) 4615 newton mmN( 300� deg) 15 newton V( 300� deg) 23 newton
�M( 315� deg) 2678 newton mm N( 315� deg) 5 newton V( 315� deg) 21 newton �M( 330� deg) 8973 newton mm N( 330� deg) 4 newton V( 330� deg) 17 newton
M( 345� deg) 1 104 newton mm � N( 345� deg) 10 newton V( 345� deg) 9 newton
M( 360� deg) 1 104 newton mm � N( 360� deg) 12 newton V( 360� deg) 0 newton

Graph of tangential force versus angle x:
20
0
N x( ) 20
newton
40
60 0 90 180 270
x
deg
At A, At B,
N( 0� deg) 12 newton N( 90� deg) 37 newton
At C, At D,
N( 180� deg) 12 newton N( 270� deg) 37 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 12 (newton min NN) � lbf 49 newton
Above is the graph of radial force, V, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the radial force at the corresponding angle. The thin circular curve shows the zero force curve; inside the curve corresponds to positive force (inward direction), and outside the curve corresponds to a negative force (outward direction).
360

Graph of radial force versus angle x:
100
50
V x( )
newton
0
50 0 90 180 270
x
deg
At A, At B,
V( 0� deg) 0 newton V( 90� deg) 12 newton
At C, At D,
V( 180� deg) 74 newton V( 270� deg) 12 newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 74 (newton min VV ) � lbf 23 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is the distance from the centroidal axis to the innermost fiber.
n i n n i 0 in
no is thedistance from the centroidal axis to the outermost fiber.
n d n i n 0 ino o
The moment of largest magnitude is
�M max MM � lbf� in
max
max MM min MM ���
�� min MM � lbf� in MM � min MM
�M 4 104 newton mm
The flexure formula yields the stresses if the beam were straight
�M n i newtonV i V i 423
I c 2 mm
360

V o M n o
�
I c
newtonV o 423
2 mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 426 2 mm
The flexure stress experienced by the extreme outermost fiber on the convex side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 421 2 mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n1 differ in value. There are also stresses due to the tangential force N to be considered.
Load 2� S R� w� Load 147.81 newton
Workdone 0.5 Load� ' L� Workdone 48.22 newton m �
Displacement ' L Displacement 652 mm

Notation file
Enter dimensions of cross section
Conditions
Geometry of cross section
Case 2(b2)Circular Ring with Solid Rectangular Section and Loading as Shown Below
Loading
Solid rectangular section
Provides a description of Table 17 and the notation used.
Radius of curvature measured to centroid of section: R �1250 mm
�Height of rectangular section: d 25 mm
�Width of rectangular section: b 1 mm
If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R R50 thin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d
Half-height: n d
n 13 mm 2

Shape constant for rectangle 6 (See article 7.10 on page 201 in F
5 Roark):
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia un additional support conditions are provided as discussed on pa 260 in Roark:
� I c
b d3
I c 1302 4 mm 12
Area:
�A b d A 25 2 mm
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side (Vi) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V�.i
k is the ratio of actual stress in extreme fiber on the convex sideo(Vo) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V�.
h1
k i 1 � n
k i 1 �3 h R
1 n n
h1
k o 1 � n
k o 1 �3 h R
1 n n

�Enter properties and Angle: T 120 deg loading of ring
�Modulus of elasticity: E newton
15150 2 mm
Poisson's ratio: Q 0.125
newton�Load: w 0.06827 mm
Modulus of rigidity: newton�G 3500 2 mm
Constants Hoop-stress deformation factor:
h � I c 5
D � thick thin D 3.33 10 R A R2�
Transverse radial shear deformation factor:
� �h �
F E I c 4� � �E 2 F ( 1 Q ) � thick thin E 1.73 10 �R G A � R2
Hoop-stress corrections:
1 D E k 1 1k 1
1 D k 2 1k 2
Computational constants:
s sin T( )
c cos ( )T
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � � �angle( x ) x ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )

Initial conditions Loading terms:
LT M x( ) angle x( ) T!( ) � w R2�
2 z x( )(� s )2
LT N x( ) angle x( ) T!( ) � w R� z x( )� z x( )(� s )
LT V x( ) angle x( ) T!( ) � w R� u x( )� z x( )(� s )
Values at A and/or C of moment (M), tangential force (N) and radial force (V):
M A w R2�
2 � S � S � s 2 0.5
s c�
2 T
s 2 � T 2 s�
3 k 2 2 s�(� s c� S T )
M A 3506 newton mm �
M C w R2�
2 � S � S
2 s c�
2 T
2 T s 2� 2 s3�
3 k 2 2 s�(� s c� S T )
M C 3 104 newton mm �
N A w R� s 3�
3 � S N A 6 newton
V A 0 lbf � V A 0 newton
General formulas x 0 deg � 1 deg �� 360 deg ��� for internal moment and forces
M x( ) M A N A R� 1(� u x( ) ) V A R
� z x( )� LT M x( )
N x( ) N A u x( )� V A z x( )� LT N x( )
V x( ) N A z x( )� V A u x( )� LT V x( )

Graphing preparations
Set up vector of moments to plot: i 0 �� 360
M( i � deg)MMi (20000 min MM )M min�lbf in
� �MXi MMi � cos ( 90 deg i � deg) MMi
� sin 90 deg i � deg)(M min MYi M min
Set up vector of radial forces to plot:
N( i � deg)NNi (20000 min NN)N minlbf
� �NXi NNi � cos ( 90 deg i � deg) NNi
� sin 90 deg i � deg)(N min NYi N min
Set up vector of tangential forces to plot:
V( i � deg)VVi (20000 min VV )V minlbf
� �VXi VVi � cos ( 90 deg i � deg) VVi
� sin 90 deg i � deg)(V min VYi V min
Set up radial lines in polar graph: j 0 �� 27
max( MM ) max( NN) max( VV ) max max maxM max N max V max20000 20000 20000
�MXP2 j� 0 MXP2 j� � � cos ( 15 j � deg)1 3 M max
�MYP2 j� 0 MYP2 j� � � sin 15 j � deg)(1 3 M max
�NXP2 j� 0 NXP2 j� � � cos ( 15 j � deg)1 3 N max
�NYP2 j� 0 NYP2 j� � � sin 15 j � deg)(1 3 N max
�VXP2 j� 0 VXP2 j� � � cos ( 15 j � deg)1 3 V max
�VYP2 j� 0 VYP2 j� � � sin 15 j � deg)(1 3 V max
j 0 �� 55
MM MM
NN NN
VV VV

For solid cross Change in horizontal diameter (an increase is positive): section
k 1� S � s3
w� R4
2 � T 2� k 2
� S 2 � S � s2 � s �T s c� 2 k 22 � ( 2 s� s c� S T )D H 2 E� � I c
� S 3
D H 306 mm
Change in vertical diameter (an increase is positive):
�w R4 � 2 c
k 1� S � S � s T � s c
3
���D V 2 E� � I c � S 3 3
2 � T � �� k 2� S � c2 s c� T s 2 2 k 2
2 � ( 2 s� s c� S T )
D V 392 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):
3 3� �w R4 � 2 s2 1 S � s � c
32 c s� 2 � S � k 1
� � s' L S � ( S T ) S c T � s ��� �4 E� I c
� S 2 2 3 3 � S
2 � T 2� s c� � s �� k 2 S T 2 s� � S S
2 S T� S � s � c 2 k 2
2 � ( 2 s� s c� S T )
' L 275 mm
Graphs of moment The following pages present the plots of internal moment and forces and forces in both polar and standard graphs. The vectors necessary for
formatting the polar plots are presented past the right margin.

Above is the graph of internal moment, M, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the internal moment at the corresponding angle. The thin circular curve shows the zero moment curve; inside the curve corresponds to positive moment (inward direction), and outside the curve corresponds to a negative moment (outward direction).
Graph of internal moment versus angle x:
1 104
2000
6000M x( )
newton mm1.4 104
�
2.2 104
3 104
0 90 180 270 x
deg
At A, At B,
� � ( � �M 0 deg) 3506( newton mm M 90 deg) 3845 newton mm
At C, At D,
� 3 10 � �M 180 deg)( 4 � (newton mm M 270 deg) 3845 newton mm
Maximum internal moment: Minimum internal moment:
4 �� (max( MM ) � lbf� in 8050 newton mm min MM ) � lbf� in 3 10 newton mm
360

� � ( � �M 0 deg) 3506( newton mm N 0 deg) 6 (newton V 0 deg) 0 newton � � ( � �M 15 deg) 3256( newton mm N 15 deg) 6 (newton V 15 deg) 2 newton � � ( � �M 30 deg) 2522( newton mm N 30 deg) 5 (newton V 30 deg) 3 newton � � ( � �M 45 deg) 1353( newton mm N 45 deg) 4 (newton V 45 deg) 4 newton � � ( � �M 60 deg) 169( newton mm N 60 deg) 3 (newton V 60 deg) 5 newton � � ( � �M 75 deg) 1942( newton mm N 75 deg) 2 (newton V 75 deg) 6 newton � � ( �M 90 deg) 3845( newton mm N 90 deg) 2 10 V 90 deg) 615 newton( � newton � � ( � �M 105 deg) 5748( newton mm N 105 deg) 2 (newton V 105 deg) 6 newton � � ( � �M 120 deg) 7521( newton mm N 120 deg) 3 (newton V 120 deg) 5 newton � � ( � �M 135 deg) 7696( newton mm N 135 deg) 14 (newton V 135 deg) 5 newton � � ( � �M 150 deg) 3066( newton mm N 150 deg) 21 (newton V 150 deg) 24 newton � � ( � �M 165 deg) 8719( newton mm N 165 deg) 19 (newton V 165 deg) 49 newton
3 104� � ( � �M 180 deg)( newton mmN 180 deg) 6 (newton V 180 deg) 74 newton � � ( � �M 195 deg) 8719( newton mm N 195 deg) 19 (newton V 195 deg) 49 newton � � ( � �M 210 deg) 3066( newton mm N 210 deg) 21 (newton V 210 deg) 24 newton � � ( � �M 225 deg) 7696( newton mm N 225 deg) 14 (newton V 225 deg) 5 newton � � ( � �M 240 deg) 7521( newton mm N 240 deg) 3 (newton V 240 deg) 5 newton � � ( � �M 255 deg) 5748( newton mm N 255 deg) 2 (newton V 255 deg) 6 newton
5 10 15� � ( �M 270 deg) 3845( V 270 deg) 6( newtonnewton mm N 270 deg) newton �
� � ( � �M 285 deg) 1942( newton mm N 285 deg) 2 (newton V 285 deg) 6 newton � � ( � �M 300 deg) 169( newton mm N 300 deg) 3 (newton V 300 deg) 5 newton � � ( � �M 315 deg) 1353( newton mm N 315 deg) 4 (newton V 315 deg) 4 newton � � ( � �M 330 deg) 2522( newton mm N 330 deg) 5 (newton V 330 deg) 3 newton � � ( � �M 345 deg) 3256( newton mm N 345 deg) 6 (newton V 345 deg) 2 newton � � ( � �M 360 deg) 3506( newton mm N 360 deg) 6 (newton V 360 deg) 0 newton

Above is the graph of the tangential force, N, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the tangential force at the corresponding angle. The thin circular curve shows the zero force curve; inside the curve corresponds to positive force (inward direction), and outside the curve corresponds to a negative force (outward direction).
Graph of tangential force versus angle x:
30
16.67
N x( )
newton
3.33
10 0 90 180 270
x
deg
At A, At B,
15��N 0 deg) 6( (newton N 90 deg) 2 10 newton
At C, At D,
15� �N 180 deg) 6( (newton N 270 deg) 5 10 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 21 (newton min NN) � lbf 6 newton
360

Above is the graph of radial force, V, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the radial force at the corresponding angle. The thin circular curve shows the zero force curve; inside the curve corresponds to positive force (inward direction), and outside the curve corresponds to a negative force (outward direction).
Graph of radial force versus angle x:
20
0
20V x( )
newton40
60
800 50 100 150 200 250 300 350
x
deg
At A, At B,
� �V 0 deg) 0( (newton V 90 deg) 6 newton
At C, At D,
� �V 180 deg) 74( (newton V 270 deg) 6 newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 6 (newton min VV ) � lbf 74 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is the distance from the centroidal axis to the innermost fiber.
n i n n i 13 mm
no is the distance from the centroidal axis to the outermost fiber.
n d n i n 13 mmo o

The moment of largest magnitude is
�M max MM lbf�
min MM
� in min MM ���
� � lbf� in� max MM
max MM � min MM
3 104 �M newton mm
The flexure formula yields the stresses if the beam were straight
�M n i newtonV i V i 277
2I c mm
�M n o newtonV o V o 277
2I c mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 278 2 mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 275 2 mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n1 differ in value. There are also stresses due to the tangential force N to be considered.
Load 2 R � sin T( )� � w Load 147.81 newton
Workdone 0.5 Load � ' L� Workdone 20.32 newton m �
Displacement ' L Displacement 275 mm

APPENDIX A3
Loadcase 3 – Impact with Jacket.

Notation file
Enter dimensions of cross section
Conditions
Geometry of cross section
Load Case 3(b1) - Impact Test, 3.5m/s distributed load, t = 25.0mm
Roark case 15
Loading
Solid rectangular section
Provides a description of Table 17 and the notation used.
Radius of curvature measured to centroid of section: R 1250 mm
Height of rectangular section: d 25 mm
�Width of rectangular section: b 1 mm
If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R R50 thin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d
Half-height: n d
n 13 mm 2

Shape constant for rectangle: F 6
See article 7.10 on page 201 5 in Roark.
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia unless additional support conditions are provided as discussed on page 260 in Roark :
�b d3
1 103 4 mmI c I c12
Area:
�A b d A 25 2 mm
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side (Vi) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V�.iko is the ratio of actual stress in extreme fiber on the convex side (Vo) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V�.
h1
k i1 � n
k i 1 �3 h R
1 n n
h1
1 � n k o 1k o �3 h R
1 n n
�Enter properties and Modulus of elasticity: E newton
14000 loading of ring mm2
Poissons ratio: Q 0.125
Load: w newton�0.01477
mm
Modulus of rigidity: G newton�3500
2 mm

Constants Hoop-stress deformation factor:
3.33 10 5D
h � thick thin � I c
D R A R2�
Transverse radial shear deformation factor:
�h �
F E� I c 1.6 10 4� �E 2 F� ( 1 Q ) � thick thin E
�R G A � R2
Hoop-stress corrections:
1 D E k 1 1k 1
1 D k 2 1k 2
Computational constants:
I cK T 1
�A R2
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � � �angle( x ) x ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )
Initial conditions Loading terms:
w� R2 � x �LT M( )x angle( ) z ( )x K T� ( u x( ) 1 )
� � x � z xLT N( )x w R angle( ) ( )
� � x � u xLT V( )x w R angle( ) ( )
Values at A and/or C of moment (M), tangential force (N) and radial force (V):
K T 1 � E 4 �� �w R2 k 2 0.5 1 10 newton mm k 1
M A M A
K T 1 � E 3 104 �� �w R2 0.5 newton mm
k 1 M C k 2 M C
�K T 1 k 2�w R� 0.5 N A 9 newton k 1
N A
0 newton � V A 0 newtonV A

�General formulas x 0 deg � � 1 deg � �� 360 deg for internal moment and forces M x � x � � z x( ) M A N A R� ( 1 u( ) ) V A R ( ) LT M( )x
N x( ) N A u x� ( ) V A z x� ( ) LT N( )x
V x( ) N A z x� ( ) V A u x� ( ) LT V( )x
Graphing preparations
Set up vector of moments to plot: i 0 �� 360 �M( i deg)
MMi (20000 min MM )M min�lbf in
� � � �MXi MMi � cos ( 90 deg i deg) MMi
� sin 90 deg i deg)(M min MYi M min
Set up vector of radial forces to plot: �N( i deg)
NNi (20000 min NN)N minlbf
� � � �NXi NNi � cos ( 90 deg i deg) NNi
� sin 90 deg i deg)(N min NYi N min
Set up vector of tangential forces to plot:
�V( i deg)VVi (20000 min VV )V minlbf
VXi VVi V min � cos ( 90 deg � � i deg ) VYi VVi V min
� sin 90 deg �( � i deg)
MM MM
NN NN
VV VV
For solid cross Change in horizontal diameter (an increase is positive): section
� k 1� Sw R3
� k 2� S �2 k 2
2D H E A� � h 2
D H 849 mm
Change in vertical diameter (an increase is positive):
k 1 S 2�
w� R3 � �D V E A� � h 4
2 k 22
D V 925 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):

� �3 k 1 S 2 k 2
� Sw� R3
k 22�' L 1 K T 1 � D
�E A� h 16 2
' L 554 mm
Graphs of moment The following pages present the plots of internal moment and forces and forces in standard graphs.
Graph of internal moment versus angle x:
4 104
2 104
M x ( )
newton mm�
2 104
0 90 180 270
x
deg
� 4 � ( � �M 0 deg)( 1 10
1 10
newton mm N 0 deg) 9 (newton V 0 deg) 0 newton 4� � ( � �M 15 deg)( newton mmN 15 deg) 8 (newton V 15 deg) 7 newton
� � ( � �M 30 deg) 7042( newton mm N 30 deg) 3 (newton V 30 deg) 13 newton � � ( � �M 45 deg) 2101( newton mm N 45 deg) 4 (newton V 45 deg) 17 newton � � ( � �M 60 deg) 3622( newton mm N 60 deg) 12 newton V 60 deg) 18( newton � � ( � �M 75 deg) 9089( newton mm N 75 deg) 21 newton V 75 deg) 15( newton � 1 10
1 10
�M 90 deg)( � N 90 deg) 294 newton mm( � newton V 90 deg) 9( newton 4� �M 105 deg)( newton mm �� N 105 deg) 35( newtonV 105 deg) 0( newton
1 104� �M 120 deg)( newton mm �� N 120 deg) 38( newtonV 120 deg) 11( newton � � ( � �M 135 deg) 7213( newton mmN 135 deg) 37 newtonV 135 deg) 24( newton � � ( �M 150 deg) 2861( newton mm N 150 deg) 32 newton �( ) 37 newtonV 150 deg � 2 10 �M 165 deg)( � N 165 deg) 234 newton mm( � newtonV 165 deg) 49( newton
3 104� � �M 180 deg)( newton mm(� N 180 deg) 9 newton V 180 deg) 58( newton
2 104� � �M 195 deg)( newton mm(� N 195 deg) 23 newtonV 195 deg) 49( newton � � ( � �M 210 deg) 2861( newton mm N 210 deg) 32 newtonV 210 deg) 37( newton � � ( � �M 225 deg) 7213( newton mmN 225 deg) 37 newtonV 225 deg) 24( newton
1 104� �M 240 deg)( newton mm �� N 240 deg) 38( newtonV 240 deg) 11( newton
1 104� �M 255 deg)( newton mm �� N 255 deg) 35( newtonV 255 deg) 0( newton
1 104� �M 270 deg)( newton mm �� N 270 deg) 29( newtonV 270 deg) 9( newton � � ( � �M 285 deg) 9089( newton mmN 285 deg) 21 newtonV 285 deg) 15( newton � � ( � �M 300 deg) 3622( newton mmN 300 deg) 12 newtonV 300 deg) 18( newton
360

� � ( � �M 315 deg) 2101( newton mm N 315 deg) 4 newton V 315 deg) 17( newton � � ( � �M 330 deg) 7042( newton mm N 330 deg) 3 (newton V 330 deg) 13 newton � 1 10 �M 345 deg)( � N 345 deg) 84 newton mm( � (newton V 345 deg) 7 newton
1 104� � �M 360 deg)( newton mm(� N 360 deg) 9 (newton V 360 deg) 0 newton
At A, At B,
1 10 4 �� �M 0 deg)( 4 � (newton mm M 90 deg) 1 10 newton mm
At C, At D,
3 10 4 �� �M 180 deg)( 4 � (newton mm M 270 deg) 1 10 newton mm
Maximum internal moment: Minimum internal moment:
3 10 4 �max( MM ) � lbf� in 4 � (newton mm min MM ) � lbf� in 1 10 newton mm
Graph of tangential force versus angle x:
20
5
N x( ) 10
newton
25
40 0 90 180 270
x
deg
At A, At B, � �N 0 deg) 9( (newton N 90 deg) 29 newton
At C, At D,
� �N 180 deg) 9( (newton N 270 deg) 29 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 9 (newton min NN) � lbf 38 newton
360

Graph of radial force versus angle x:
60
33.33
V x ( )
newton
6.67
20 0 90 180 270
x
deg
At A, At B,
� �V 0 deg) 0( (newton V 90 deg) 9 newton
At C, At D,
� �V 180 deg) 58( (newton V 270 deg) 9 newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 58 (newton min VV ) � lbf 18 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is the distance from the centroidal axis to the innermost fiber.
n i n n i 13 mm
no is thedistance from the centroidal axis to the outermost fiber.
n d n i n 13 mmo o
The moment of largest magnitude is
�M max MM � lbf� in
max
max MM min MM ���
�� min MM � lbf� in MM � min MM
3 104 �M newton mm
The flexure formula yields the stresses if the beam were straight
�M n i newtonV i V i 332
2I c mm
360

�M n o newtonV o V o 332
2I c mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 335 2 mm
The flexure stress experienced by the extreme outermost fiber on the convex side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 330 2 mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n1 differ in value. There are also stresses due to the tangential force N to be considered.
�Load 2 � S � R w Load 116.00 newton
� � �Workdone 0.5 Load ' L Workdone 32.14 newton m
Displacement ' L Displacement 554 mm

Notation file
Enter dimensions of cross section
Conditions
Geometry of cross section
Load Case 3(b2) - Impact Test, 3.5m/s distributed load,
t = 25.0mm Roark case 8
Loading
Solid rectangular section
Provides a description of Table 17 and the notation used.
Radius of curvature measured to centroid of section: R �1250 mm
�Height of rectangular section: d 25 mm
�Width of rectangular section: b 1 mm
If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R R50 thin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d
Half-height: n d
n 13 mm 2

Shape constant for rectangle 6 (See article 7.10 on page 201 in F
5 Roark):
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia un additional support conditions are provided as discussed on pa 260 in Roark:
� I c
b d3
I c 1302 4 mm 12
Area:
�A b d A 25 2 mm
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side (Vi) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V�.i
k is the ratio of actual stress in extreme fiber on the convex sideo(Vo) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V�.
h1
k i 1 � n
k i 1 �3 h R
1 n n
h1
k o 1 � n
k o 1 �3 h R
1 n n

�Enter properties and Angle: T 170.8 deg loading of ring
�Modulus of elasticity: E newton
14000 2 mm
Poisson's ratio: Q .125
newton�Load: w 0.2900 mm
Modulus of rigidity: newton�G 3500 2 mm
Constants Hoop-stress deformation factor:
h � I c 5
D � thick thin D 3.33 10 R A R2�
Transverse radial shear deformation factor:
� �h �
F E I c 4� � �E 2 F ( 1 Q ) � thick thin E 1.60 10 �R G A � R2
Hoop-stress corrections:
1 D E k 1 1k 1
1 D k 2 1k 2
Computational constants:
s sin T( )
c cos ( )T
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � �angle( x ) x � ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )

Initial conditions Loading terms:
w� R2
LT M( x ) ( angle( ) ! T ) ( ) s )2 x � � ( z x2
LT N( x ) x � � ( ) � ( z x( angle( ) ! T ) � w R z x ( ) s )
LT V( x ) x � � ( ) � ( z x( angle( ) ! T ) � w R u x ( ) s )
Values at A and/or C of moment (M), tangential force (N) and radial force (V):
�w R2 � s c� T 2 � T
2 s�2� sS 0.5 s k 2� ( 2 s� s c� S T )
2 M A 2 � S 3
�M A 98 newton mm
w� R2 �S s c� T� T � s2 2 s3
k 2� ( 2 s� s c� S T )
2 2 2 3 M C 2 � S
�M C 5497 newton mm
� �w R s3
N A 3 � SN A 0 newton
0 lbf � V A 0 newtonV A
�General formulas x 0 deg � � 1 deg � �� 360 deg for internal moment and forces � x � � z xM x( ) M A N A R� ( 1 u( ) ) V A R ( ) LT M( )x
N x( ) N A u x� ( ) V A z x� ( ) LT N( )x
V x( ) N A z x� ( ) V A u x� ( ) LT V( )x
Graphing preparations
Set up vector of moments to plot: i 0 �� 360
�M( i deg)MMi (20000 min MM )M min�lbf in
� � � �MXi MMi � cos ( 90 deg i deg) MMi
� sin 90 deg i deg)(M min MYi M min

Set up vector of radial forces to plot:
�N( i deg)NNi (20000 min NN)N minlbf
� � � �NXi NNi � cos ( 90 deg i deg) NNi
� sin 90 deg i deg)(N min NYi N min
Set up vector of tangential forces to plot:
�V( i deg)VVi (20000 min VV )V minlbf
� � � �VXi VVi � cos ( 90 deg i deg) VVi
� sin 90 deg i deg)(V min VYi V min
MM MM
NN NN
VV VV
For solid cross Change in horizontal diameter (an increase is positive): section
k 1� S � s3
w� R4
2 � T 2� k 2
� S 2 � S � s2 � s �T s c� 2 k 22 � ( 2 s� s c� S T )D H 2 E� � I c
� S 3
D H 10 mm
Change in vertical diameter (an increase is positive):
�w R4 � 2 c
k 1� S � S � s T � s c
3
���D V 2 E� � I c � S 3 3
� s �2 � T� k 2� S � c2 s c� T
2 2 k 22 � ( 2 s� s c� S T )
D V 16 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):
3 3� �w R4 � 2 s2 1 S � s � c � �
32 � s
c s� � s2 � S k 1 ' L S � ( S T ) S c T ��� �4 E� I c
� S 2 2 3 3 � S
2 � T 2� s c� � s �� k 2 S T 2 s� � S S
2 S T� S � s � c 2 k 2
2 � ( 2 s� s c� S T )
' L 12 mm

Graphs of moment The following pages present the plots of internal moment and forces and forces in standard graphs.
Graph of internal moment versus angle x:
2000
400
1200M x( )
newton mm� 2800
4400
60000 90 180 270
x
deg
� � ( � �M 0 deg) 98( newton mm N 0 deg) 0 (newton V 0 deg) 0 newton � � ( � �M 15 deg) 91( newton mm N 15 deg) 0 (newton V 15 deg) 0 newton � � ( � �M 30 deg) 72( newton mm N 30 deg) 0 (newton V 30 deg) 0 newton � � ( � �M 45 deg) 41( newton mm N 45 deg) 0 (newton V 45 deg) 0 newton � � ( � �M 60 deg) 0( newton mm N 60 deg) 0 (newton V 60 deg) 0 newton � � ( � �M 75 deg) 48( newton mm N 75 deg) 0 (newton V 75 deg) 0 newton � � ( � �M 90 deg) 98( newton mm N 90 deg) 0 (newton V 90 deg) 0 newton � � ( � �M 105 deg) 149( newton mm N 105 deg) 0 (newton V 105 deg) 0 newton � � ( � �M 120 deg) 197( newton mm N 120 deg) 0 (newton V 120 deg) 0 newton � � ( � �M 135 deg) 237( newton mm N 135 deg) 0 (newton V 135 deg) 0 newton � � ( � �M 150 deg) 269( newton mm N 150 deg) 0 (newton V 150 deg) 0 newton � � ( � �M 165 deg) 288( newton mm N 165 deg) 0 (newton V 165 deg) 0 newton � � ( � �M 180 deg) 5497( newton mm N 180 deg) 0 (newton V 180 deg) 58 newton � � ( � �M 195 deg) 288( newton mm N 195 deg) 0 (newton V 195 deg) 0 newton � � ( � �M 210 deg) 269( newton mm N 210 deg) 0 (newton V 210 deg) 0 newton � � ( � �M 225 deg) 237( newton mm N 225 deg) 0 (newton V 225 deg) 0 newton � � ( � �M 240 deg) 197( newton mm N 240 deg) 0 (newton V 240 deg) 0 newton � � ( � �M 255 deg) 149( newton mm N 255 deg) 0 (newton V 255 deg) 0 newton � � ( � �M 270 deg) 98( newton mm N 270 deg) 0 (newton V 270 deg) 0 newton � � ( � �M 285 deg) 48( newton mm N 285 deg) 0 (newton V 285 deg) 0 newton � � ( � �M 300 deg) 0( newton mm N 300 deg) 0 (newton V 300 deg) 0 newton � � ( � �M 315 deg) 41( newton mm N 315 deg) 0 (newton V 315 deg) 0 newton � � ( � �M 330 deg) 72( newton mm N 330 deg) 0 (newton V 330 deg) 0 newton � � ( � �M 345 deg) 91( newton mm N 345 deg) 0 (newton V 345 deg) 0 newton � � ( � �M 360 deg) 98( newton mm N 360 deg) 0 (newton V 360 deg) 0 newton
360

At A, At B,
� � ( � �M 0 deg) 98( newton mm M 90 deg) 98 newton mm
At C, At D,
� � ( � �M 180 deg) 5497( newton mm M 270 deg) 98
Maximum internal moment:
�
newton mm
Minimum internal moment:
( �max( MM ) � lbf� in 292 newton mm min MM ) � lbf� in 5497 newton mm
Graph of tangential force versus angle x:
3
1.67
N x ( )
newton
0.33
1 0 90 180 270
x
deg
At A, At B,
� �N 0 deg) 0( (newton N 90 deg) 0 newton
At C, At D,
� �N 180 deg) 0( (newton N 270 deg) 0 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 2 (newton min NN) � lbf 0 newton
360

Graph of radial force versus angle x:
20
4
12V x( )
newton28
44
600 50 100 150 200 250 300 350
x
deg
At A, At B,
� �V 0 deg) 0( (newton V 90 deg) 0 newton
At C, At D,
� �V 180 deg) 58( (newton V 270 deg) 0 newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 0 (newton min VV ) � lbf 58 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is the distance from the centroidal axis to the innermost fiber.
n i n n i 13 mm
no is the distance from the centroidal axis to the outermost fiber.
d n i n o 13 mm
The moment of largest magnitude is
n o
�M max MM � lbf� in
max
max MM min MM ���
�� min MM � lbf� in MM � min MM
�M 5497 newton mm
The flexure formula yields the stresses if the beam were straight

�M n i newtonV i V i 53
2I c mm
�M n o newtonV o V o 53
2I c mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 53 2 mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 52 2mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n 1 differ in value. There are also stresses due to the tangential force N to be considered.
� � ( ) � wLoad 2 R sin T Load 115.91 newton
� � �Workdone 0.5 Load ' L Workdone 0.71 newton m
Displacement ' L Displacement 12 mm

APPENDIX A4
Load case 4 – Dropped into Water.

Case 4(b1)- Circular Ring with Solid Rectangular Section and Loading as Shown Below
Loading
Solid rectangular section
Notation file Provides a description of Table 17 and the notation used.
Enter dimensions of Radius of curvature measured cross section to centroid of section: R 1250 mm
Height of rectangular section: d 25 mm
�Width of rectangular section: b 1 mm
Conditions If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R R50 thin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d

Geometry of Half-height: n d n 13 mm cross section 2
Shape constant for rectangle: F 6
See article 7.10 on page 201 5 in Roark.
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia unless additional support conditions are provided as discussed on page 260 in Roark :
�b d3
1 103 4 mmI c I c12
Area:
�A b d A 25 mm2
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side (Vi) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V�.iko is the ratio of actual stress in extreme fiber on the convex side (Vo) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V�.
h1
k i 1 � n
k i 1 �3 h R
1 n n
h1
1 � n k o 1k o �3 h R
1 n n

14000 newton�Enter properties and Modulus of elasticity: E loading of ring mm2
Poissons ratio: Q 0.125
newton�Load: w 0.03565 mm
Modulus of rigidity: G newton�3500
2 mm
Constants Hoop-stress deformation factor:
h � I c 5
D � thick thin D 3.33 10 R A R2�
Transverse radial shear deformation factor:
� �h �
F E I c 4� �E 2 F ( 1 Q ) � � thick thin E 1.6 10 �R G A � R2
Hoop-stress corrections:
1 D E k 1 1k 1
1 D k 2 1
Computational constants:
I cK T
k 2
1 �A R2
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � � �angle( x ) x ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )
Initial conditions Loading terms:
w� R2 � x �LT M( )x angle( ) z ( )x K T� ( u x( ) 1 )
LT N( )x w� R� angle( ) ( )x � z x
LT V( )x w� R� angle( ) ( )x � u x

Values at A and/or C of moment (M), tangential force (N) and radial force (V):
K T 1 � E 4 �� �w R2 k 2 0.5 3 10 newton mm M A M Ak 1
K T 1 � E 8 104 �� �w R2 0.5 newton mm M C k 2 M Ck 1
�K T 1 k 2�w R� 0.5N A N Ak 1
0 newton � V AV A
22 newton
0 newton
�General formulas x 0 deg � � 1 deg � �� 360 deg for internal moment and forces � x � � z xM x( ) M A N A R� ( 1 u( ) ) V A R ( ) LT M( )x
N x( ) N A u x� ( ) V A z x� ( ) LT N( )x
V x( ) N A z x� ( ) V A u x� ( ) LT V( )x

Graphing preparations
Set up vector of moments to plot: i 0 �� 360
M( i � deg)MMi (20000 min MM )M min�lbf in
� �MXi MMi � cos ( 90 deg i � deg) MMi
� sin 90 deg i � deg)(M min MYi M min
Set up vector of radial forces to plot:
N( i � deg)NNi (20000 min NN)N minlbf
� �NXi NNi � cos ( 90 deg i � deg) NNi
� sin 90 deg i � deg)(N min NYi N min
Set up vector of tangential forces to plot:
V( i � deg)VVi (20000 min VV )V minlbf
� �VXi VVi � cos ( 90 deg i � deg) VVi
� sin 90 deg i � deg)(V min VYi V min
Set up radial lines in polar graph: j 0 �� 48
max( MM ) max( NN) max( VV ) max max maxM max N max V max20000 20000 20000
�MXP2 j� 0 MXP2 j� � � cos ( 15 j � deg)1 3 M max
�MYP2 j� 0 MYP2 j� � � sin 15 j � deg)(1 3 M max
�NXP2 j� 0 NXP2 j� � � cos ( 15 j � deg)1 3 N max
�NYP2 j� 0 NYP2 j� � � sin 15 j � deg)(1 3 N max
�VXP2 j� 0 VXP2 j� � � cos ( 15 j � deg)1 3 V max
�VYP2 j� 0 VYP2 j� � � sin 15 j � deg)(1 3 V max
MM MM
NN NN
VV VV

For solid cross Change in horizontal diameter (an increase is positive): section
� k 1� Sw R3
� k 2� S �2 k 2
2D H E A� � h 2
D H 2050 mm
Change in vertical diameter (an increase is positive):
k 1 S 2�
w� R3 � �D V E A� � h 4
2 k 22
D V 2234 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):
2
' L w� R3
E A� h� � 1
3 k 1 S� �
16
k 2� S
2 k 2
2 K T 1 � D
' L 1337 mm
Graphs of moment The following pages present the plots of internal moment and force and forces in both polar and standard graphs. The vectors necessary for
formatting the polar plots are presented past the right margin.
Above is the graph of internal moment, M, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the internal moment at the corresponding angle. The thin circular curve shows the zero moment curve; inside the curve corresponds to positive moment (inward direction), and outside the curve corresponds to a negative moment (outward direction).

Graph of internal moment versus angle x:
51 10
45 10
M x ( )
newton mm�
45 10
0 90 180 270
x
deg
At A, At B,
4 �� �M 0 deg) 3 10( 4 � (newton mm M 90 deg) 3 10 newton mm
At C, At D,
4 �� �M 180 deg) 8 10( 4 � (newton mm M 270 deg) 3 10 newton mm
Maximum internal moment: Minimum internal moment:
4 �max( MM ) � lbf� in 8 104 � (newton mm min MM ) � lbf� in 4 10 newton mm
Above is the graph of the tangential force, N, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the tangential force at the corresponding angle. The thin circular curve shows the zero force curve; inside the curve corresponds to positive force (inward direction), and outside the curve corresponds to a negative force (outward direction).
360

4� 3 10
3 10
� ( � �M 0 deg)( newton mm N 0 deg) 22 newton
19 newton
V 0 deg)( 0 newton 4� � ( � �M 15 deg)( newton mmN 15 deg) V 15 deg) 17( newton
2 10
5072 newton mm
4� � ( � 8 newton �M 30 deg)( newton mmN 30 deg) V 30 deg) 31( newton � �M 45 deg)( � � N 45 deg) 9( (newton V 45 deg) 41 newton
� � ( � �M 60 deg) 8742( newton mm N 60 deg) 29 (newton V 60 deg) 43 newton � 2 10 �M 75 deg)( � N 75 deg) 514 newton mm ( � (newton V 75 deg) 37 newton � 3 10
4 10
�M 90 deg)( � N 90 deg) 704 newton mm( � (newton V 90 deg) 22 newton � �M 105 deg)( � N 105 deg) 854 newton mm( � newtonV 105 deg)(
3 104� � �M 120 deg)( newton mm(� N 120 deg) 92 newtonV 120 deg)(
0 newton
27 newton
2 10
6906 newton mm
4� � �M 135 deg)( newton mm(� N 135 deg) 90 newtonV 135 deg)( 58 newton � �M 150 deg)( � � N 150 deg) 78( newtonV 150 deg)(
� 4 10 �M 165 deg)( � N 165 deg) 554 newton mm ( � newtonV 165 deg)(
90 newton
118 newton
8 104� � �M 180 deg)( newton mm (� N 180 deg) 22 newtonV 180 deg)( 140 newton
4 10
6906 newton mm
4� � �M 195 deg)( newton mm (� N 195 deg) 55 newtonV 195 deg)( 118 newton �M 210 deg)( � � N 210 deg) 78( newton �( )V 210 deg 90 newton
� 2 10 �M 225 deg)( � N 225 deg) 904 newton mm( � newtonV 225 deg)( 58 newton
3 104� � �M 240 deg)( newton mm(� N 240 deg) 92 newtonV 240 deg)(
4 104� � �M 255 deg)( newton mm(� N 255 deg) 85 newtonV 255 deg)(
27 newton
0 newton
3 104� � �M 270 deg)( newton mm(� N 270 deg) 70 newtonV 270 deg) 22( newton
2 104� � �M 285 deg)( newton mm(� N 285 deg) 51 newtonV 285 deg) 37( newton � � ( � �M 300 deg) 8742( newton mmN 300 deg) 29 newtonV 300 deg) 43( newton
� �M 315 deg)( � 5072 newton mm � N 315 deg) 9( (newton V 315 deg) 41 newton � 2 10 8 newton
19 newton V 345 deg
�M 330 deg)( 4 newton mm ( � (� N 330 deg) V 330 deg) 31 newton
3 104� �M 345 deg)( newton mm (� N 345 deg) ( � ) 17 newton
3 104� �M 360 deg)( newton mm (� N 360 deg) 22 newton V 360 deg( � ) 0 newton

Graph of tangential force versus angle x:
50
12.5
N x( ) 25
newton
62.5
100 0 90 180 270
x
deg
At A, At B, � �N 0 deg) 22( (newton N 90 deg) 70 newton
At C, At D, � �N 180 deg) 22( (newton N 270 deg) 70 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 22 (newton min NN) � lbf 92 newton
Above is the graph of radial force, V, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the radial force at the corresponding angle. The thin circular curve shows the zero force curve; inside the curve corresponds to positive force (inward direction), and outside the curve corresponds to a negative force (outward direction).
360

Graph of radial force versus angle x:
150
83.33
V x ( )
newton
16.67
50 0 90 180 270
x
deg
At A, At B,
� �V 0 deg) 0( (newton V 90 deg) 22 newton
At C, At D,
� �V 180 deg) 140( (newton V 270 deg) 22 newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 140 (newton min VV ) � lbf 43 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is the distance from the centroidal axis to the innermost fiber.
n i n n i
no is thedistance from the centroidal axis to the outermost fiber.
0 in
n d n i no o 0 in
The moment of largest magnitude is
�M max MM � lbf� in
max
max MM min MM ���
�� min MM � lbf� in MM � min MM
8 104 �M newton mm
The flexure formula yields the stresses if the beam were straight
�M n i newtonV i V i 802
2I c mm
360

� newtonM n o V oV oV o 2 mmI c
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 808 2 mm
The flexure stress experienced by the extreme outermost fiber on the convex side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 797 2 mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n1 differ in value. There are also stresses due to the tangential force N to be considered.
Load 2 � S R� w� Load 279.99 newton
Workdone 0.5 Load� ' L� Workdone 187.23 newton m�
Displacement ' L Displacement 1337 mm

Notation file
Enter dimensions of cross section
Conditions
Geometry of cross section
Case 4(b2) Circular Ring with Solid Rectangular Section and Loading as Shown Below
Loading
Solid rectangular section
Provides a description of Table 17 and the notation used.
Radius of curvature measured to centroid of section: R �1250 mm
�Height of rectangular section: d 25 mm
�Width of rectangular section: b 1 mm
If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R R50 thin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d
Half-height: n d
n 13 mm 2

Shape constant for rectangle 6 (See article 7.10 on page 201 in F
5 Roark):
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia unless additional support conditions are provided as discussed on page 260 in Roark :
� I c
b d3
I c 1302 4 mm 12
Area:
�A b d A 25 2 mm
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side (Vi) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V�.i
k is the ratio of actual stress in extreme fiber on the convex sideo(Vo) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V�.
h1
k i 1 � n
k i 1 �3 h R
1 n n
h1
k o 1 � n
k o 1 �3 h R
1 n n

�Enter properties and Angle: T 120 deg loading of ring
�Modulus of elasticity: E newton
14000 2 mm
Poisson's ratio: Q 0.125
newton�Load: w 0.1294 mm
Modulus of rigidity: newton�G 3500 2 mm
Constants Hoop-stress deformation factor:
h � I c 5
D � thick thin D 3.33 10 R A R2�
Transverse radial shear deformation factor:
� �h �
F E I c 4� � �E 2 F ( 1 Q ) � thick thin E 1.60 10 �R G A � R2
Hoop-stress corrections:
1 D E k 1 1k 1
1 D k 2 1k 2
Computational constants:
s sin T( )
c cos ( )T
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � �angle( x ) x � ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )

Initial conditions Loading terms:
LT M x( ) angle x( ) T!( ) � w R2�
2 z x( )(� s )2
LT N x( ) angle x( ) T!( ) � w R� z x( )� z x( )(� s )
LT V x( ) angle x( ) T!( ) � w R� u x( )� z x( )(� s )
Values at A and/or C of moment (M), tangential force (N) and radial force (V):
M A w R2�
2 � S � S � s 2 0.5
s c�
2 T
s 2 � T 2 s�
3 k 2 2 s�(� s c� S T )
M A 6646 newton mm �
M C w R2�
2 � S � S
2 s c�
2 T
2 T s 2� 2 s3�
3 k 2 2 s�(� s c� S T )
M C 5 104 newton mm �
N A w R� s 3�
3 � S N A 11 newton
V A 0 lbf � V A 0 newton
General formulas x 0 deg � 1 deg �� 360 deg ��� for internal moment and forces
M x( ) M A N A R� 1(� u x( ) ) V A R
� z x( )� LT M x( )
N x( ) N A u x( )� V A z x( )� LT N x( )
V x( ) N A z x( )� V A u x( )� LT V x( )

Graphing preparations
Set up vector of moments to plot: i 0 �� 360
M( i � deg)MMi (20000 min MM )M min�lbf in
� �MXi MMi � cos ( 90 deg i � deg) MMi
� sin 90 deg i � deg)(M min MYi M min
Set up vector of radial forces to plot:
N( i � deg)NNi (20000 min NN)N minlbf
� �NXi NNi � cos ( 90 deg i � deg) NNi
� sin 90 deg i � deg)(N min NYi N min
Set up vector of tangential forces to plot:
V( i � deg)VVi (20000 min VV )V minlbf
� �VXi VVi � cos ( 90 deg i � deg) VVi
� sin 90 deg i � deg)(V min VYi V min
Set up radial lines in polar graph: j 0 �� 27
max( MM ) max( NN) max( VV ) max max maxM max N max V max20000 20000 20000
�MXP2 j� 0 MXP2 j� � � cos ( 15 j � deg)1 3 M max
�MYP2 j� 0 MYP2 j� � � sin 15 j � deg)(1 3 M max
�NXP2 j� 0 NXP2 j� � � cos ( 15 j � deg)1 3 N max
�NYP2 j� 0 NYP2 j� � � sin 15 j � deg)(1 3 N max
�VXP2 j� 0 VXP2 j� � � cos ( 15 j � deg)1 3 V max
�VYP2 j� 0 VYP2 j� � � sin 15 j � deg)(1 3 V max
j 0 �� 55
MM MM
NN NN
VV VV

3
2
3
For solid cross section
D H
Change in horizontal diameter (an increase is positive):
w R4�
2 E� I c � � S
k 1� S s 3�
3 k 2 S 2 � S s 2� T 2 � T s 2� s c��� 2 k 2
2� 2 s�(� s c� S T )
D H 627 mm
Change in vertical diameter (an increase is positive):
D V w R4�
2 E� I c � � S
� k 1� S S s� T s�
2 3
�
k 2 S c 2� s c���
c
T
c 3
2 � T s�
���
2 k 2 2� 2 s�(� s c� S T )
D V 805 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):
' L w R4�
4 E� I c � � S
� S S T( )� 2 s2�
2 �
k 2 s c� S��
1
T
S s� c�
2 2 � T s 2�
2 � S k 1� 2
S s� c T s� c 3
3 s 3
3 � S �
2 s� � S S 2
S T� S s� c� 2 k 2 2� 2 s�(� s c�
���
S T )
' L 564 mm
Graphs of moment and forces
The following pages present the plots of internal moment and forces in both polar and standard graphs. The vectors necessary for formatting the polar plots are presented past the right margin.

Above is the graph of internal moment, M, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the internal moment at the corresponding angle. The thin circular curve shows the zero moment curve; inside the curve corresponds to positive moment (inward direction), and outside the curve corresponds to a negative moment (outward direction).
Graph of internal moment versus angle x:
2 104
4000
1.2 104
M x ( )
newton mm2.8 104
�
4.4 104
6 104
0 90 180 270 x
deg
At A, At B,
� � ( � �M 0 deg) 6646( newton mm M 90 deg) 7288 newton mm
At C, At D,
� 5 10 � �M 180 deg)( 4 � (newton mm M 270 deg) 7288 newton mm
Maximum internal moment: Minimum internal moment:
2 10 4 �max( MM ) � lbf� in 4 � (newton mm min MM ) � lbf� in 5 10 newton mm
360

� � ( � � 0M 0 deg) 6646( newton mm N 0 deg) 11 (newton V 0 deg) newton � � ( � � 3M 15 deg) 6171( newton mm N 15 deg) 11 (newton V 15 deg) newton � � ( � � 6M 30 deg) 4779( newton mm N 30 deg) 10 (newton V 30 deg) newton � � ( � � 8M 45 deg) 2565( newton mm N 45 deg) 8 (newton V 45 deg) newton � � ( � �M 60 deg) 321( newton mm N 60 deg) 6 (newton V 60 deg) 10 newton � � ( � �M 75 deg) 3681( newton mm N 75 deg) 3 (newton V 75 deg) 11 newton � � ( �M 90 deg) 7288( newton mm N 90 deg) 4 10 V 90 deg) 1115 newton( � newton
1 104� � ( � �M 105 deg)( newton mm N 105 deg) 3 (newton V 105 deg) 11 newton
1 104� � ( � �M 120 deg)( newton mm N 120 deg) 6 (newton V 120 deg) 10 newton
1 104� � ( � �M 135 deg)( newton mm N 135 deg) 26 (newton V 135 deg) 10 newton � � ( � �M 150 deg) 5811( newton mm N 150 deg) 39 (newton V 150 deg) 46 newton
2 104� � ( � �M 165 deg)( newton mmN 165 deg) 36 (newton V 165 deg) 92 newton
5 104� � ( � �M 180 deg)( newton mmN 180 deg) 11 (newton V 180 deg) 140 newton
2 104� � ( � �M 195 deg)( newton mmN 195 deg) 36 (newton V 195 deg) 92 newton � � ( � �M 210 deg) 5811( newton mm N 210 deg) 39 (newton V 210 deg) 46 newton
1 104� � ( � �M 225 deg)( newton mm N 225 deg) 26 (newton V 225 deg) 10 newton
1 104� � ( � �M 240 deg)( newton mm N 240 deg) 6 (newton V 240 deg) 10 newton
1 104� � ( � �M 255 deg)( newton mm N 255 deg) 3 (newton V 255 deg) 11 newton
9 10 15� � ( �M 270 deg) 7288( newton mm N 270 deg) newton �V 270 deg) 11( newton � � ( � �M 285 deg) 3681( newton mm N 285 deg) 3 (newton V 285 deg) 11 newton � � ( � �M 300 deg) 321( newton mm N 300 deg) 6 (newton V 300 deg) 10 newton � � ( � �M 315 deg) 2565( newton mm N 315 deg) 8 (newton V 315 deg) 8 newton � � ( � �M 330 deg) 4779( newton mm N 330 deg) 10 (newton V 330 deg) 6 newton � � ( � �M 345 deg) 6171( newton mm N 345 deg) 11 (newton V 345 deg) 3 newton � � ( � �M 360 deg) 6646( newton mm N 360 deg) 11 (newton V 360 deg) 0 newton

Above is the graph of the tangential force, N, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the tangential force at the corresponding angle. The thin circular curve shows the zero force curve; inside the curve corresponds to positive force (inward direction), and outside the curve corresponds to a negative force (outward direction).
Graph of tangential force versus angle x:
60
33.33
N x( )
newton
6.67
20 0 90 180 270
x
deg
At A, At B,
15��N 0 deg) 11( (newton N 90 deg) 4 10 newton
At C, At D,
15� �N 180 deg) 11( (newton N 270 deg) 9 10 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 40 (newton min NN) � lbf 11 newton
360

Above is the graph of radial force, V, as a polar plot. The radial lines show the angle x measured from the ray rising up vertically from the center of the cross section through A. The thick curve represents the radial force at the corresponding angle. The thin circular curve shows the zero force curve; inside the curve corresponds to positive force (inward direction), and outside the curve corresponds to a negative force (outward direction).
Graph of radial force versus angle x:
50
10
30V x( )
newton70
110
150 0 50 100 150 200 250 300 350
x
deg
At A, At B,
� �V 0 deg) 0( (newton V 90 deg) 11 newton
At C, At D,
� �V 180 deg) 140( (newton V 270 deg) 11 newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 11 (newton min VV ) � lbf 140 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is the distance from the centroidal axis to the innermost fiber.
n i n n i 13 mm
no is the distance from the centroidal axis to the outermost fiber.
n d n i n 13 mmo o

The moment of largest magnitude is
�M max MM lbf�
min MM
� in min MM ���
� � lbf� in� max MM
max MM � min MM
5 104 �M newton mm
The flexure formula yields the stresses if the beam were straight
�M n i newtonV i V i 524
2I c mm
�M n o newtonV o V o 524
2I c mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 528 2 mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 521 2 mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n1 differ in value. There are also stresses due to the tangential force N to be considered.
Load 2 R � sin T( )� � w Load 280.16 newton
Workdone 0.5 Load � ' L� Workdone 78.99 newton m �
Displacement ' L Displacement 564 mm

APPENDIX A5
Loadcase 6 – Submergence Underwater.

Load case 6(a) - Pressure on Hull Uniform Radial Unit Load Circular Ring with Solid Rectangular Section
Notation file
Enter dimensions of cross section
Conditions
and Loading as Shown below Roark Case 12
Loading
Solid rectangular section
Provides a description of Table 17 and the notation used.
Radius of curvature measured to centroid of section: R �1250 mm
�Height of rectangular section: d 6.4 mm
�Width of rectangular section: b 1 mm
If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R R195 thin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d

Geometry of Half-height: n d n 3 mm cross section 2
Shape constant for rectangle: F 6
See article 7.10 on page 201 5 in Roark.
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia unless additional support conditions are provided as discussed on page 260 in Roark :
�b d3
I c 22 4 mmI c 12
Area:
�A b d A 6 2 mm
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side ( Vi) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V�.i
ko is the ratio of actual stress in extreme fiber on the convex side ( Vo) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V�.
h1
k i1 � n
k i 1 �3 h R
1 n n
h1
1 � n k o 1k o �3 h R
1 n n

�Enter properties and Angle: T 0 deg loading of ring
�Modulus of elasticity: E newton
6400 2 mm
Poisson's ratio: Q 0.3
Load: w newton�0.5118
mm
Modulus of rigidity: newton�G 2800 2 mm
Constants
Hoop-stress deformation factor:
6D
h � thick thin � I c
D 2 10 R A R2�
Transverse radial shear deformation factor:
� �h �
F E I c 6� � �E 2 F ( 1 Q ) � thick thin E 6 10 �R G A � R2
Hoop-stress corrections:
1 D E k 1 1k 1
1 D k 2 1k 2
Computational constants:
s sin T( )
c cos ( )T
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � �angle( x ) x � ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )

Initial conditions Loading terms:
LT M( x ) x x( angle( ) T ! ) � w� R2 � ( 1 cos ( angle( ) T ) )
x � �LT N( x ) x( angle( ) T ! ) � w R ( 1 cos ( angle( ) T ) )
x � � (LT V( x ) x( angle( ) T ! ) � w R sin angle( ) T )
Values at A and/or C of moment (M), tangential force (N) and radial force (V):
w� R2 � s S � c T � c k 2
� ( S T s )M A S
�M A 2 newton mm
w� R2 � S s T � c k 2
� ( S T s )M C S
�M C 2 newton mm
� w R � ( s S � c T � c ) N A 640 newtonN A S
0 lbf � V A 0 newtonV A
�General formulas x 0 deg � � 1 deg � �� 360 deg for internal moment and � x � � z xM x M A N A R� ( 1 u( ) ) V A R ( ) LT M( )xforces ( )
N x( ) N A u x� ( ) V A z x� ( ) LT N( )x
V x( ) N A z x� ( ) V A u x� ( ) LT V( )x
Graphing preparations
Set up vector of moments to plot: i 0 �� 360
�M( i deg)MMi (20000 min MM )M minlbf in �
� � �MXi MMi � cos ( 90 deg � i deg) MMi
� sin 90 deg i deg)(M min MYi M min
Set up vector of radial forces to plot:
�N( i deg)NNi (20000 min NN)N minlbf
� � �NXi NNi � cos ( 90 deg � i deg) NNi
� sin 90 deg i deg)(N min NYi N min

Set up vector of tangential forces to plot:
V( i � deg)VVi (20000 min VV )V minlbf
� �VXi VVi � cos ( 90 deg i � deg) VVi
� sin 90 deg i � deg)(V min VYi V min
MM MM
NN NN
VV VV
For solid cross Change in horizontal diameter (an increase is positive): section
�k 1� ( s T � c ) 2 k 2
2 � ( S T s )w� R4S � � � �T 2 k 2 ( 1 s ) ���D H �2 E I c 2 S
�S � c T � c 2 k 2
2 � ( S T s )w� R4S s� � �� T ! k 1�2 E I c 2 S
D H 39 mm
Change in vertical diameter (an increase is positive):
�k 1� s � ( S T ) 2 k 2
2 � ( S T s )�w R4 � k 2
� ( 1 c )D V �E I c 2 S
D V 39 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):
� S 2 � sS w R4
�� � �' L T s T � c k 2� S � ( T s 2 ) 2 k 2
2 � ( S T s ) ���k 1� �2 2 E I c � S 2
�S w R4 �� � �� T ! k 1
� S 2 � s S T � s S � c s T � c k 2
� S � ( S T s 2 2 c ) ��� � �2 2 E I c
� S �� 2 k 2
2 � ( S T s )
' L 20 mm

M 0 deg �( ) 2 newton mm �
M 15 deg �( ) 2 newton mm �
M 30 deg �( ) 2 newton mm �
M 45 deg �( ) 2 newton mm �
M 60 deg �( ) 2 newton mm �
M 75 deg �( ) 2 newton mm �
M 90 deg �( ) 2 newton mm �
�M 105 deg)( �M 120 deg)( �M 135 deg)( �M 150 deg)( �M 165 deg)( �M 180 deg)( �M 195 deg)( �M 210 deg)( �M 225 deg)( �M 240 deg)( �M 255 deg)( �M 270 deg)( �M 285 deg)( �M 300 deg)( �M 315 deg)( �M 330 deg)( �M 345 deg)( �M 360 deg)(
Graphs of moment and forces
�2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm �2 newton mm
The following pages present the plots of internal moment and forces in standard graphs.
Graph of internal moment versus angle x:
1.746
M x( ) 1.747 �newton mm
1.748
1.749 0 90 180 270
x
deg
360

At A, At B, � � ( � �M 0 deg) 2( newton mm M 90 deg) 2 newton mm
At C, At D,
� � ( � �M 180 deg) 2( newton mm M 270 deg) 2 newton mm
Maximum internal moment: Minimum internal moment:
� ( �max( MM ) � lbf� in 2 newton mm min MM ) � lbf� in 2 newton mm
Graph of tangential force versus angle x:
639
639.5
N x( )
newton
640
640.5 0 90 180 270 360
x
deg
At A, At B, � �N 0 deg) 640( (newton N 90 deg) 640 newton
At C, At D,� �N 180 deg) 640( (newton N 270 deg) 640 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 640 (newton min NN) � lbf 640 newton
Graph of radial force versus angle x:
1
0.5
V x( ) 0
newton
0.5
1 0 90 180 270 360
x
deg

At A, At B,
� � 0V 0 deg) 0( (newton V 90 deg) newton
At C, At D,
� � 0V 180 deg) 0( (newton V 270 deg) newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 0 (newton min VV ) � lbf 0 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is thedistance from the centroidal axis to the innermost fiber.
n i n n i
no is thedistance from the centroidal axis to the outermost fiber.
3 mm
d n i n o
The moment of largest magnitude is
n o 3 mm
�M max MM � lbf� in
max
max MM min MM ���
�� min MM � lbf� in MM � min MM
�M 2 newton mm
The flexure formula yields the stresses if the beam were straight
�M n i newtonV i V i 0
2I c mm
�M n o newtonV o V o 0
2I c mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 0 2 mm

The flexure stress experienced by the extreme outermost fiber on the convex side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 0 2 mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n1 differ in value. There are also stresses due to the tangential force N to be considered.
� � ( )Load 2 w � R sin T Load 0 newton
� � �Workdone 0.5 Load ' L Workdone 0 newton m
Displacement ' L Displacement 20 mm

Load case 6(b) - Pressure on Hull Uniform Radial Unit Load Circular
Ring with Solid Rectangular Section and Loading as Shown BelowRoark Case 12
Notation file
Enter dimensions of cross section
Conditions
Loading
Solid rectangular section
Provides a description of Table 17 and the notation used.
Radius of curvature measured to centroid of section: R �1250 mm
�Height of rectangular section: d 6.4 mm
�Width of rectangular section: b 1 mm
If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R R195 thin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d

Geometry of Half-height: n d n 3 mm cross section 2
Shape constant for rectangle: F 6
See article 7.10 on page 201 5 in Roark.
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia unless additional support conditions are provided as discussed on page 260 in Roark :
�b d3
I c 22 4 mmI c 12
Area:
�A b d A 6 2 mm
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side ( Vi) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V�.i
ko is the ratio of actual stress in extreme fiber on the convex side ( Vo) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V�.
h1
k i1 � n
k i 1 �3 h R
1 n n
h1
1 � n k o 1k o �3 h R
1 n n

�Enter properties and Angle: T 0 deg loading of ring
�Modulus of elasticity: E newton
6400 2 mm
Poisson's ratio: Q 0.3
Load: w newton�0.3286
mm
Modulus of rigidity: newton�G 2800 2 mm
Constants
Hoop-stress deformation factor:
6D
h � thick thin � I c
D 2 10 R A R2�
Transverse radial shear deformation factor:
� �h �
F E I c 6� � �E 2 F ( 1 Q ) � thick thin E 6 10 �R G A � R2
Hoop-stress corrections:
1 D E k 1 1k 1
1 D k 2 1k 2
Computational constants:
s sin T( )
c cos ( )T
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � �angle( x ) x � ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )

Initial conditions Loading terms:
LT M( x ) x x( angle( ) T ! ) � w� R2 � ( 1 cos ( angle( ) T ) )
x � �LT N( x ) x( angle( ) T ! ) � w R ( 1 cos ( angle( ) T ) )
x � � (LT V( x ) x( angle( ) T ! ) � w R sin angle( ) T )
Values at A and/or C of moment (M), tangential force (N) and radial force (V):
w� R2 � s S � c T � c k 2
� ( S T s )M A S
�M A 1 newton mm
w� R2 � S s T � c k 2
� ( S T s )M C S
�M C 1 newton mm
� w R � ( s S � c T � c ) N A 411 newtonN A S
0 lbf � V A 0 newtonV A
�General formulas x 0 deg � � 1 deg � �� 360 deg for internal moment and � x � � z xM x M A N A R� ( 1 u( ) ) V A R ( ) LT M( )xforces ( )
N x( ) N A u x� ( ) V A z x� ( ) LT N( )x
V x( ) N A z x� ( ) V A u x� ( ) LT V( )x
Graphing preparations
Set up vector of moments to plot: i 0 �� 360
�M( i deg)MMi (20000 min MM )M minlbf in �
� � �MXi MMi � cos ( 90 deg � i deg) MMi
� sin 90 deg i deg)(M min MYi M min
Set up vector of radial forces to plot:
�N( i deg)NNi (20000 min NN)N minlbf
� � �NXi NNi � cos ( 90 deg � i deg) NNi
� sin 90 deg i deg)(N min NYi N min

Set up vector of tangential forces to plot:
V( i � deg)VVi (20000 min VV )V minlbf
� �VXi VVi � cos ( 90 deg i � deg) VVi
� sin 90 deg i � deg)(V min VYi V min
MM MM
NN NN
VV VV
For solid cross Change in horizontal diameter (an increase is positive): section
�k 1� ( s T � c ) 2 k 2
2 � ( S T s )w� R4S � � � �T 2 k 2 ( 1 s ) ���D H �2 E I c 2 S
�S � c T � c 2 k 2
2 � ( S T s )w� R4S s� � �� T ! k 1�2 E I c 2 S
D H 25 mm
Change in vertical diameter (an increase is positive):
�k 1� s � ( S T ) 2 k 2
2 � ( S T s )�w R4 � k 2
� ( 1 c )D V �E I c 2 S
D V 25 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):
� S 2 � sS w R4
�� � �' L T s T � c k 2� S � ( T s 2 ) 2 k 2
2 � ( S T s ) ���k 1� �2 2 E I c � S 2
�S w R4 �� � �� T ! k 1
� S 2 � s S T � s S � c s T � c k 2
� S � ( S T s 2 2 c ) ��� � �2 2 E I c
� S �� 2 k 2
2 � ( S T s )
' L 13 mm

M 0 deg �( ) 1 newton mm �
M 15 deg �( ) 1 newton mm �
M 30 deg �( ) 1 newton mm �
M 45 deg �( ) 1 newton mm �
M 60 deg �( ) 1 newton mm �
M 75 deg �( ) 1 newton mm �
M 90 deg �( ) 1 newton mm �
�M 105 deg)( �M 120 deg)( �M 135 deg)( �M 150 deg)( �M 165 deg)( �M 180 deg)( �M 195 deg)( �M 210 deg)( �M 225 deg)( �M 240 deg)( �M 255 deg)( �M 270 deg)( �M 285 deg)( �M 300 deg)( �M 315 deg)( �M 330 deg)( �M 345 deg)( �M 360 deg)(
�1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm �1 newton mm
Graphs of moment The following pages present the plots of internal moment and forces and forces in standard graphs.
Graph of internal moment versus angle x:
1.12
1.121
M x( )
newton mm�
1.122
1.123 0 90 180 270
x
deg
360

At A, At B, � � ( � �M 0 deg) 1( newton mm M 90 deg) 1 newton mm
At C, At D,
� � ( � �M 180 deg) 1( newton mm M 270 deg) 1 newton mm
Maximum internal moment: Minimum internal moment:
� ( �max( MM ) � lbf� in 1 newton mm min MM ) � lbf� in 1 newton mm
Graph of tangential force versus angle x:
410
410.5
N x( )
newton
411
411.5 0 90 180 270 360
x
deg
At A, At B, � �N 0 deg) 411( (newton N 90 deg) 411 newton
At C, At D,� �N 180 deg) 411( (newton N 270 deg) 411 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 411 (newton min NN) � lbf 411 newton
Graph of radial force versus angle x:
1
0.5
V x( ) 0
newton
0.5
1 0 90 180 270 360
x
deg

At A, At B,
� � 0V 0 deg) 0( (newton V 90 deg) newton
At C, At D,
� � 0V 180 deg) 0( (newton V 270 deg) newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 0 (newton min VV ) � lbf 0 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is thedistance from the centroidal axis to the innermost fiber.
n i n n i
no is thedistance from the centroidal axis to the outermost fiber.
3 mm
d n i n o
The moment of largest magnitude is
n o 3 mm
�M max MM � lbf� in
max
max MM min MM ���
�� min MM � lbf� in MM � min MM
�M 1 newton mm
The flexure formula yields the stresses if the beam were straight
�M n i newtonV i V i 0
2I c mm
�M n o newtonV o V o 0
2I c mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 0 2 mm

The flexure stress experienced by the extreme outermost fiber on the convex side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 0 2mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n1 differ in value. There are also stresses due to the tangential force N to be considered.
� � ( )Load 2 w � R sin T Load 0 newton
� � �Workdone 0.5 Load ' L Workdone 0 newton m
Displacement ' L Displacement 13 mm

APPENDIX A6
Loadcase 7 – Towing Damage.

Load case 7(a) - Pressure on Hull Uniform Radial Unit Load Circular Ring with Solid Rectangular Section
Notation file
Enter dimensions of cross section
Conditions
and Loading as Shown Below Roark Case 12
Loading
Solid rectangular section
Provides a description of Table 17 and the notation used.
Radius of curvature measured to centroid of section: R �1250 mm
�Height of rectangular section: d 25.0 mm
�Width of rectangular section: b 1 mm
If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R R50 thin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d

Geometry of Half-height: n d n 13 mm cross section 2
Shape constant for rectangle: F 6
See article 7.10 on page 201 5 in Roark.
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia unless additional support conditions are provided as discussed on page 260 in Roark :
�b d3
1 103 4 mmI c I c12
Area:
�A b d A 25 2 mm
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side (Vi) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (V /V�.i
ko is the ratio of actual stress in extreme fiber on the convex side (Vo) to unit stress ( V� in corresponding fiber as computed by ordinary flexure formula for a straight beam (Vo/V�.
h1
k i1 � n
k i 1 �3 h R
1 n n
h1
1 � n k o 1k o �3 h R
1 n n

�Enter properties and Angle: T 90 deg loading of ring
�Modulus of elasticity: E newton
14000 2 mm
Poisson's ratio: Q 0.125
Load: w newton�0.68
mm
Modulus of rigidity: newton�G 3500 2 mm
Constants
Hoop-stress deformation factor:
3 10 5D
h � thick thin � I c
D R A R2�
Transverse radial shear deformation factor:
� �h �
F E I c� � �E 2 F ( 1 Q ) � thick thin E 0 �R G A � R2
Hoop-stress corrections:
1 D E k 1 1k 1
1 D k 2 1k 2
Computational constants:
s sin T( )
c cos ( )T
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � �angle( x ) x � ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )

Initial conditions Loading terms:
LT M( x ) x x( angle( ) T ! ) � w� R2 � ( 1 cos ( angle( ) T ) )
x � �LT N( x ) x( angle( ) T ! ) � w R ( 1 cos ( angle( ) T ) )
x � � (LT V( x ) x( angle( ) T ! ) � w R sin angle( ) T )
Values at A and/or C of moment (M), tangential force (N) and radial force (V):
w� R2 � s S � c T � c k 2
� ( S T s )M A S
1 105 �newton mm
w� R2
M A
� S s T � c k 2� ( S T s )M C S
5 105 �newton mm M C
� w R � ( s S � c T � c ) N A 271 newtonN A S
0 lbf � V A 0 newtonV A
�General formulas x 0 deg � � 1 deg � �� 360 deg for internal moment and � x � � z xM x M A N A R� ( 1 u( ) ) V A R ( ) LT M( )xforces ( )
N x( ) N A u x� ( ) V A z x� ( ) LT N( )x
V x( ) N A z x� ( ) V A u x� ( ) LT V( )x
Graphing preparations
Set up vector of moments to plot: i 0 �� 360
�M( i deg)MMi (20000 min MM )M minlbf in �
� � �MXi MMi � cos ( 90 deg � i deg) MMi
� sin 90 deg i deg)(M min MYi M min
Set up vector of radial forces to plot:
�N( i deg)NNi (20000 min NN)N minlbf
� � �NXi NNi � cos ( 90 deg � i deg) NNi
� sin 90 deg i deg)(N min NYi N min

Set up vector of tangential forces to plot:
V( i � deg)VVi (20000 min VV )V minlbf
� �VXi VVi � cos ( 90 deg i � deg) VVi
� sin 90 deg i � deg)(V min VYi V min
MM MM
NN NN
VV VV
For solid cross Change in horizontal diameter (an increase is positive): section
�k 1� ( s T � c ) 2 k 2
2 � ( S T s )w� R4S � � � �T 2 k 2 ( 1 s ) ���D H �2 E I c 2 S
�S � c T � c 2 k 2
2 � ( S T s )w� R4S s� � �� T ! k 1�2 E I c 2 S
D H 12450 mm
Change in vertical diameter (an increase is positive):
�k 1� s � ( S T ) 2 k 2
2 � ( S T s )�w R4 � k 2
� ( 1 c )D V �E I c 2 S
D V 13559 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):
� S 2 � sS w R4
�� � �' L T s T � c k 2� S � ( T s 2 ) 2 k 2
2 � ( S T s ) ���k 1� �2 2 E I c � S 2
�S w R4 �� � �� T ! k 1
� S 2 � s S T � s S � c s T � c k 2
� S � ( S T s 2 2 c ) ��� � �2 2 E I c
� S �� 2 k 2
2 � ( S T s )
' L 8508 mm

� �M 0 deg) 145165( newton mm � �M 15 deg) 133641( newton mm � �M 30 deg) 99854( newton mm � �M 45 deg) 46107( newton mm � �M 60 deg) 23937( newton mm � �M 75 deg) 105506( newton mm � �M 90 deg) 193039( newton mm � �M 105 deg) 244369( newton mm � �M 120 deg) 219793( newton mm � �M 135 deg) 120987( newton mm � �M 150 deg) 45317( newton mm � �M 165 deg) 267785( newton mm � �M 180 deg) 531256( newton mm � �M 195 deg) 267785( newton mm �M 210 deg) 45317(
1 105�M 225 deg)(
2 105�M 240 deg)(
2 105�M 255 deg)(
2 105�M 270 deg)(
1 105�M 285 deg)( �M 300 deg) 23937( �M 315 deg) 46107(
1 105�M 330 deg)(
1 105�M 345 deg)(
1 105�M 360 deg)(
�newton mm �newton mm �newton mm �newton mm �newton mm �newton mm �newton mm �newton mm �newton mm �newton mm �newton mm
Graphs of moment The following pages present the plots of internal moment and forces and forces in standard graphs.
Graph of internal moment versus angle x:
5 105
0
M x( )
newton mm�
5 105
1 106
0 90 180 270 x
deg
360

At A, At B, 5 �� �M 0 deg) 1 10( 5 � (newton mm M 90 deg) 2 10 newton mm
At C, At D,
5 �� �M 180 deg) 5 10( 5 � (newton mm M 270 deg) 2 10 newton mm
Maximum internal moment: Minimum internal moment:
5 �max( MM ) � lbf� in 2 105 � (newton mm min MM ) � lbf� in 5 10 newton mm
Graph of tangential force versus angle x:
200
0
N x( ) 200
newton
400
600 0 90 180 270 360
x
deg
At A, At B,13� �N 0 deg) 271( (newton N 90 deg) 1 10 newton
At C, At D,13� �N 180 deg) 579( (newton N 270 deg) 2 10 newton
Maximum tangential force: Minimum tangential force:
max( NN) � lbf 42 (newton min NN) � lbf 579 newton
Graph of radial force versus angle x:
500
0
V x( )
newton
500
1000 0 90 180 270 360
x
deg

At A, At B,
� �V 0 deg) 0( (newton V 90 deg) 271 newton
At C, At D,
� �V 180 deg) 850( (newton V 270 deg) 271 newton
Maximum radial force: Minimum radial force:
max( VV ) � lbf 271 (newton min VV ) � lbf 850 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is thedistance from the centroidal axis to the innermost fiber.
n i n n i 13 mm
no is thedistance from the centroidal axis to the outermost fiber.
d n i n o 13 mm
The moment of largest magnitude is
n o
�M max MM � lbf� in
max
max MM min MM ���
�� min MM � lbf� in MM � min MM
5 105 �M newton mm
The flexure formula yields the stresses if the beam were straight
�M n i newtonV i V i 5100
2I c mm
�M n o newtonV o V o 5100
2I c mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 5134 2 mm

The flexure stress experienced by the extreme outermost fiber on the convex side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 5066 2mm
There may be larger tensile or compressive stresses elsewhere in the ring at locations where large moments of the opposite sign occur if n and n1 differ in value. There are also stresses due to the tangential force N to be considered.
� � ( )Load 2 w � R sin T Load 1700 newton
� � �Workdone 0.5 Load ' L Workdone 7232 newton m
Displacement ' L Displacement 8508 mm

Load case 20.1 - Bulkhead or Supporting Ring in PipeCircular Ring with Solid Rectangular Section and Loading as Shown Below
Roark Case 20
Notation file
Enter dimensions of cross section
Conditions
Loading
Solid rectangular section
Provides a description of Table 17 and the notation used.
Radius of curvature measured to centroid of section: R 1250 mm �
Height of rectangular section: d 25.0 mm �
Width of rectangular section: b 1.0 mm �
If R/d t 8, then the beam should generally be considered thin. If R/d < 8, then the beam can generally be considered thick.
R Rthin if 8 � 1 � 0 thick if
R d � 8 � 1 � 0
d d

Geometry of Half-height: n d n 12.5 mm cross section 2
Shape constant for rectangle: F 6
See article 7.10 on page 201 5 in Roark.
Moment of inertia of section about centroidal axis perpendicular to the plane of bending. Ic must be a principal moment of inertia unless additional support conditions are provided as discussed on page 260 in Roark :
� I c
b d3
I c 1302.1 4 mm 12
Area:
�A b d A 25.0 2 mm
Distance from centroidal axis to neutral axis measured toward center of curvature:
I cR 2h n � � thick � thin h 0.0 mm
�n R R A1
nln
R 1
n
ki is the ratio of actual stress in extreme fiber on the concave side (si) to unit stress (s) in corresponding fiber as computed by ordinary flexure formula for a straight beam (s/s).i
k is the ratio of actual stress in extreme fiber on the convex sideo(so) to unit stress (s) in corresponding fiber as computed by ordinary flexure formula for a straight beam (so/s).
h1
k i1 � n
k i 1.0 �3 h R
1 n n
h1
k o 1 � n
k o 1.0 �3 h R
1 n n

�Enter properties Modulus of elasticity: E newton
14000 and loading for ring mm2
Poisson's ratio: Q 0.125
�Load: W 1700 newton
Constants Modulus of rigidity:
E � newtonG G 3500
2 1� ( Q ) 2 mm
Hoop-stress deformation factor:
D h � thick thin �
I c D 0.0
R A R2�
Transverse radial shear deformation factor:
�h �
F E� I c� �E 2 F� ( 1 Q ) � thick thin E 0.0 �R G A � R2
Hoop-stress corrections:
1 D E k 1 1.0k 1
1 D k 2 1.0k 2
For this case, the angle x must lie in the interval from 0° to 180°. This is done by measuring x as positive in both the clockwise and counterclockwise directions measured from the vertical ray leaving the center of the cross section. To do this, we define a function angle(x) which is the angle between 0° and 180° that corresponds to the angle x which may be greater than 180°.
� � �angle( x ) x � ( x 180 deg) ( 360 deg x ) � ( x ! 180 deg)
z x )( sin angle( ) )( x
u x )( xcos ( angle( ) )
Initial conditions Loading terms:
� x �angle( ) z ( )xLT M( )x x
W R � 1 u( )S 2
W x �LT N( )x � ( angle( ) z ( ) )x
2 � S

LT V( )x W ( x � x� ( z x ) angle( ) u( ) )2 � S
Values at A and/or C of moment (M), tangential force (N) and radial force (V):
� �W R � k 2 0.5 M A 169090.9 newton mm M A 2 � S
�W R � �0.5 M C 507295.1 newton mm M C 2 � S k 2
�0.75 W N A 405.8 newtonN A S
0 lbf � V A 0.0 newtonV A
�General formulas x 0 deg � � 1 deg � �� 360 deg for internal moment and forces � x � � z xM x( ) M A N A R� ( 1 u( ) ) V A R ( ) LT M( )x
N x( ) N A u x� ( ) V A z x� ( ) LT N( )x
V x( ) N A z x� ( ) V A u x� ( ) LT V( )x
Graphing preparations
Set up vector of moments to plot: i 0 �� 360
MMi M i deg�( )
lbf in � M min 20000 min MM ( )
MXi MMi M min cos 90 deg �(� i deg� ) MYi MMi M min sin 90 deg �(� i deg� )
NNi N i deg�( )
lbf N min 20000 min NN ( )
NXi NNi N min cos 90 deg �(� i deg� ) NYi NNi N min sin 90 deg �(� i deg� )
Set up vector of tangential forces to plot:
VVi V i deg�( )
lbf V min 20000 min VV ( )

VXi VVi V min cos 90 deg �(� i deg� ) VYi VVi V min sin 90 deg �(� i deg� )
MM MM
NN NN
VV VV
For solid cross Change in horizontal diameter (an increase is positive): section
k 22
�W R3 �
k 1 k 2D H �E I c 4 2 S
D H 12447.1 mm
Change in vertical diameter (an increase is positive):
k 22
W � R3 k 1� S
�D V �E I c 8 S
D V 13562.4 mm
Change in the lower half of the vertical diameter (vertical motion relative to point C of a line connecting points B and D):
�' L W � R3
� 4 k 1� 3 � S
2
k 2� ( S 2 ) 2 k 2
2 �4 E� I c
� S 8
' L 8121.0 mm
� �(M 0 deg) 169091 newton mm � �(M 15 deg) 151937 newton mm � �(M 30 deg) 103205 newton mm � �(M 45 deg) 30794 newton mm � �(M 60 deg) 53075 newton mm � �(M 75 deg) 133197 newton mm � �(M 90 deg) 193057 newton mm � �(M 105 deg) 216713 newton mm � �(M 120 deg) 190691 newton mm � �(M 135 deg) 105709 newton mm � �(M 150 deg) 41931 newton mm � �(M 165 deg) 249454 newton mm

�( ) �
�( ) 2 105 �
�( ) �
M 180 deg 507295 newton mm
M 195 deg newton mm
M 210 deg 41931 newton mm
1 105 ��M 225 deg)( newton mm 5� 2 10 �M 240 deg)( newton mm 5� 2 10 �M 255 deg)( newton mm 5� 2 10 �M 270 deg)( newton mm 5� 1 10 �M 285 deg)( newton mm
� �M 300 deg) 53075 newton mm ( � 30794 newton mm �M 315 deg)(
1 105 ��M 330 deg)( newton mm
2 105 ��M 345 deg)( newton mm
2 105 ��M 360 deg)( newton mm
Graphs of moment The following pages present the plots of internal moment and forces and forces in standard graphs.
Graph of internal moment versus angle x:
6 105
4 105
2 105
M x ( )
newton mm� 0
2 105
4 105
0 90 180 270 x
deg
At A, At B,
� 193057.0 newton mm �M 0 deg)( � 169090.9 newton mm � M 90 deg)(
At C, At D,
� 193057.0 newton mm �M 180 deg)( � 507295.1 newton mm � M 270 deg)(
Maximum internal moment: Minimum internal moment:
216712.9 newton mm �(max( MM ) � lbf� in 507295.1 newton mm � min MM ) � lbf� in
Graph of tangential force versus angle x:
360

500
0
N x( )
newton
500
1000 0 90 180 270 360
x
deg
At A, At B,
� �( (N 0 deg) 405.8 newton N 90 deg) 425.0 newton
At C, At D,
� �N 180 deg) 405.8( (newton N 270 deg) 425.0 newton
Maximum tangential force: Minimum tangential force:
(max( NN) � lbf 405.8 newton min NN) � lbf 738.1 newton
Graph of radial force versus angle x:
1000
500
V x ( )
newton
0
500 0 90 180 270 360
x
deg
At A, At B,
� �( (V 0 deg) 0.0 newton V 90 deg) 135.3 newton
At C, At D,
� �( (V 180 deg) 850.0 newton V 270 deg) 135.3 newton
Maximum radial force: Minimum radial force:
(max( VV ) � lbf 850.0 newton min VV ) � lbf 260.1 newton
Computation The flexure formula allows for the computation of the stresses of stresses experienced by the outermost and innermost fibers.
ni is the distance from the centroidal axis to the innermost fiber.

n i n n i 12.5 mm
no is the distance from the centroidal axis to the outermost fiber.
n d n i n 12.5 mmo o
The moment of largest magnitude is
�M max MM � lbf� in
max
max MM min MM ���
�� min MM � lbf� in MM � min MM
507295.1 newton mm �M
The flexure formula yields the stresses if the beam were straight
�M n i newtonV i V i 4870.0
I c 2 mm
�M n o newtonV o V o 4870.0
2I c mm
The flexure stress experienced by the extreme innermost fiber on the concave side at the cross section where this numerically largest bending moment occurs is
newtonV i
� k i 4902.8 2 mm
The flexure stress experienced by the extreme outermost fiber on the convex side at the cross section where this numerically largest bending moment occurs is
newton�V o k o 2 mm

Printed and published by the Health and Safety ExecutiveC30 1/98
Printed and published by the Health and Safety Executive C0.06 3/04

ISBN 0-7176-2817-5
RR 199
78071 7 6281 79£30.00 9

TE
MP
SC
Stru
ctura
l Desig
n B
asis D
ete
rmin
atio
n P
art 2
– Desig
n E
vents a
nd
Failu
re C
ap
ab
ilities
HS
E B
OO
KS