Rotations and Translations 1. Mathematical terms The inner product of 2 vectors a,b is defined as:...
29
Rotations and Translations 1
-
Upload
gloria-osborne -
Category
Documents
-
view
212 -
download
0
Transcript of Rotations and Translations 1. Mathematical terms The inner product of 2 vectors a,b is defined as:...

Rotations and Translations
1

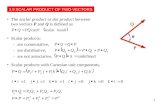
Mathematical terms The inner product of 2 vectors a,b is defined as:
The cross product of 2 vectors is defined as:
A unit vector will be marked as:
, , , , ,x y z x y z x x y y z za a a a b b b b a b a b a b a b
X
2

Representing a Point 3D A three-dimensional point
A is a reference coordinate system
here
z
y
xA
p
p
p
P
3

Representing a Point 3D (cont.)
Once a coordinate system is fixed, we can locate any point in the universe with a 3x1 position vector.
The components of P in {A} have numerical values which indicate distances along the axes of {A}.
To describe the orientation of a body we will attach a coordinate system to the body and then give a description of this coordinate system relative to the reference system.
4

Example
0
2
1
PB ?PA
134.05.02866.0)30sin()30cos( 00 YB
XB
XA PPP
232.2YAP
0.866 0.500 0.000 1 0.134
0.500 0.866 0.000 * 2 2.232 ``
0.000 0.000 1.000 0 0.000
AP
000.0ZAP
AX
BX
AYBY
PB
30
5

Description of Orientation
ˆˆˆˆˆˆ
ˆˆ ˆˆ ˆˆ
ˆˆ ˆˆ ˆˆ
ˆˆˆ
ABABAB
ABABAB
ABABAB
BA
BA
BAA
B
ZZZYZX
YZYYYX
XZXYXX
ZYXR
BX
AX
BX
AYBY
is a unit vector in B
is a coordinate of a unit vector of B in coordinates system A (i.e. the projection of onto the unit direction of its reference)
BA X
BX
6

Example Rotating B relative to A around Z by30
000.1000.0000.0
000.0866.0500.0
000.0500.0866.0
RAB
AX
BX
AYBY
7

Example In general:
AX
BX
AYBY
100
0cossin
0sincos
ZAB R
8

Using Rotation Matrices
PRP BAB
A 9

Translation
AX
AY
AZ
BX
BY
BZ
PB
BORGAP
BORGABA PPP
10

Combining Rotation and Translation
BORGABA
BA PPRP
AX
BX
PB
BORGAP
PAAY
BY
11

What is a Frame ? A set of four vectors giving position and
orientation information. The description of the frame can be
thought as a position vector and a rotation matrix.
Frame is a coordinate system, where in addition to the orientation we give a position vector which locates its origin relative to some other embedding frame.
12

Arrows Convention An Arrow - represents a vector drawn
from one origin to another which shows the position of the origin at the head of the arrow in terms of the frame at the tail of the arrow. The direction of this locating arrow tells us that {B} is known relative to {A} and not vice versa.
13

Rotating a frame B relative to a frame A about Z axis by degrees and moving it 10 units in direction of X and 5 units in the direction of Y. What will be the coordinates of a point in frame A if in frame B the point is : [3, 7, 0]T?
Example
30
000.0
562.12
098.9
000.0
000.5
000.10
0.000
7.562
0.902-
000.0
000.5
000.10
000.0
000.7
000.3
000.1000.0000.0
000.0866.0500.0
000.0500.0866.0
PA
14

Extension to 4x4
110001
PPRP BBORG
AAB
A
We can define a 4x4 matrix operator and use a 4x1 position vector
15

Example
If we use the above example we can see that:
1000
000.0000.1000.0000.0
000.5000.0866.0500.0
000.10000.0500.0866.0
TAB
16

P in the coordinate system A
1
000.0
562.12
098.9
1
000.0
000.7
000.3
1000
000.0000.1000.0000.0
000.5000.0866.0500.0
000.10000.0500.0866.0
PA
17

Formula
PTP BAB
A
18

Compound Transformation
PTP BAB
A PTP CBC
B
PTTP CBC
AB
A TTT BC
AB
AC
19

Several Combinations
TTT
TTTT
TT
TTTTTT
BC
UB
UC
DC
DA
UA
UC
AU
UA
DC
BC
UB
DA
UA
UD
1
1
11
20

Example Rotating a frame B relative to a frame A about
Z axis by degrees and moving it 1 units in direction of X and 2 units in the direction of Y. What will be
?ABT
30
21

Example cont - 2 We create a homogeneous transformation
using the function se2: T1 = se2(1, 2, 30*pi/180)T1 = 0.8660 -0.5000 1.0000 0.5000 0.8660 2.0000 0 0 1.0000Note that this is a 2D matrix, we eliminate
the z axis
22

Example cont - 3
We can also plot this, relative to the world coordinate frame, by:
>> axis([0 5 0 5]);>>trplot2(T1, 'frame', '1', 'color', 'b')
23

Example cont - 4
We can plot a point by:>> P = [3; 2];>> plot_point(P, ‘*’);
24

Example cont - 5 Now we got something like this: The point P is
known with respectto {0}
We want todetermine the coordination of point P with respect to {1}
25

Example cont - 6
What do we know ?
But…
>> P1 = inv(T1)* [P; 1]
>> P1 = h2e( inv(T1) * e2h(P) );h2e: homogenous to euclidean
0 0 11P T P
1 1 0 0 10 1( )P T P T P
26

Example cont - 7
This also can be achieved by:>> homtrans(inv(T1), P)
27

Example Rotating a frame B relative to a frame A about Z axis by
degrees and moving it 10 units in direction of X and 5 units in the direction of Y. What will be the coordinates of a point in frame A if in frame B the point is : [3, 7, 0]T?
>> T = se2(10,5,30*pi/180) >> P = [3;7;1] >> P2 = T*P >> P = inv(T)*P2
30
28

Notes
Homogeneous transforms are useful in writing compact equations; a computer program would not use them because of the time wasted multiplying ones and zeros. This representation is mainly for our convenience.
For the details turn to chapter 2.
29