Rotation matrix Representations of orientation Homogeneous ... · PDF fileRotation matrix...
76
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO KINEMATICS • relationship between joint positions and end-effector position and orientation Rotation matrix Representations of orientation Homogeneous transformations Direct kinematics Joint space and operational space Kinematic calibration Inverse kinematics problem
Transcript of Rotation matrix Representations of orientation Homogeneous ... · PDF fileRotation matrix...

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
KINEMATICS
• relationship between joint positions and end-effector positionand orientation
Rotation matrix
Representations of orientation
Homogeneous transformations
Direct kinematics
Joint space and operational space
Kinematic calibration
Inverse kinematics problem

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
POSE OF A RIGID BODY
• Position
o′ =
o′xo′yo′z
• Orientation
x′ = x′xx + x′yy + x′zz
y′ = y′xx + y′yy + y′zz
z′ = z′xx + z′yy + z′zz

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
ROTATION MATRIX
R =
x′ y′ z′
=
x′Tx y′Tx z′Tx
x′Ty y′Ty z′Ty
x′Tz y′Tz z′Tz
RTR = I
RT = R−1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Elementary rotations
• rotation ofα aboutz
Rz(α) =
cosα −sinα 0sinα cosα 0
0 0 1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• rotation ofβ abouty
Ry(β) =
cosβ 0 sinβ0 1 0
−sinβ 0 cosβ
• rotation ofγ aboutx
Rx(γ) =
1 0 00 cos γ −sinγ0 sin γ cos γ

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Representation of a vector
p =
pxpypz
p′ =
p′xp′yp′z
p =
x′ y′ z′
p′
= Rp′
p′ = RTp

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Example
px = p′x cosα− p′y sinα
py = p′x sinα+ p′y cosα
pz = p′z

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Rotation of a vector
p = Rp′
pTp = p′TRTRp′
• Example
px = p′x cosα− p′y sinα
py = p′x sinα+ p′y cosα
pz = p′z
p = Rz(α)p′

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Rotation matrix
⋆ it describes the mutual orientation between two coordinateframes; its column vectors are the direction cosines of theaxes of the rotated frame with respect to the original frame
⋆ it represents the coordinate transformation between thecoordinates of a point expressed in two different frames(with common origin)
⋆ it is the operator that allows the rotation of a vector in thesame coordinate frame

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
COMPOSITION OF ROTATION MATRICES
p1 = R12p
2
p0 = R01p
1
p0 = R02p
2
Rji = (Ri
j)−1 = (Ri
j)T
• Current frame rotation
R02 = R0
1R12
• Fixed frame rotation
R02 = R1
2R01

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Example

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
EULER ANGLES
• rotation matrix
⋆ 9 parameters with 6 constraints
• minimal representation of orientation
⋆ 3 independent parameters

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
ZYZ angles
R(φ) = Rz(ϕ)Ry′(ϑ)Rz′′(ψ)
=
cϕcϑcψ − sϕsψ −cϕcϑsψ − sϕcψ cϕsϑsϕcϑcψ + cϕsψ −sϕcϑsψ + cϕcψ sϕsϑ
−sϑcψ sϑsψ cϑ

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Inverse problem
⋆ Given
R =
r11 r12 r13r21 r22 r23r31 r32 r33
the three ZYZ angles are (ϑ ∈ (0, π))
ϕ = Atan2(r23, r13)
ϑ = Atan2
(
√
r213 + r223, r33
)
ψ = Atan2(r32,−r31)
or (ϑ ∈ (−π, 0))
ϕ = Atan2(−r23,−r13)
ϑ = Atan2
(
−√
r213 + r223, r33
)
ψ = Atan2(−r32, r31)

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
RPY angles
R(φ) = Rz(ϕ)Ry(ϑ)Rx(ψ)
=
cϕcϑ cϕsϑsψ − sϕcψ cϕsϑcψ + sϕsψsϕcϑ sϕsϑsψ + cϕcψ sϕsϑcψ − cϕsψ−sϑ cϑsψ cϑcψ

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Inverse problem
⋆ Given
R =
r11 r12 r13r21 r22 r23r31 r32 r33
the three RPY angles are (ϑ ∈ (−π/2, π/2))
ϕ = Atan2(r21, r11)
ϑ = Atan2
(
−r31,√
r232 + r233
)
ψ = Atan2(r32, r33)
or (ϑ ∈ (π/2, 3π/2))
ϕ = Atan2(−r21,−r11)
ϑ = Atan2
(
−r31,−√
r232 + r233
)
ψ = Atan2(−r32,−r33)

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
ANGLE AND AXIS
R(ϑ, r) = Rz(α)Ry(β)Rz(ϑ)Ry(−β)Rz(−α)
sinα =ry
√
r2x + r2y
cosα =rx
√
r2x + r2y
sinβ =√
r2x + r2y cosβ = rz

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
R(ϑ, r) =
r2x(1 − cϑ) + cϑ rxry(1 − cϑ) − rzsϑ
rxry(1 − cϑ) + rzsϑ r2y(1 − cϑ) + cϑ
rxrz(1 − cϑ) − rysϑ ryrz(1 − cϑ) + rxsϑ
rxrz(1 − cϑ) + rysϑryrz(1 − cϑ) − rxsϑr2z(1 − cϑ) + cϑ
R(ϑ, r) = R(−ϑ,−r)

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Inverse problem
⋆ Given
R =
r11 r12 r13r21 r22 r23r31 r32 r33
the angle and axis of rotation are (sinϑ 6= 0)
ϑ = cos−1
(
r11 + r22 + r33 − 1
2
)
r =1
2 sinϑ
r32 − r23r13 − r31r21 − r12
withr2x + r2y + r2z = 1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
UNIT QUATERNION
• 4-parameter representationQ = {η, ǫ}
η = cosϑ
2
ǫ = sinϑ
2r
η2 + ǫ2x + ǫ2y + ǫ2z = 1
⋆ (ϑ, r) and(−ϑ,−r) give the same quaternion
R(η, ǫ) =
2(η2 + ǫ2x) − 1 2(ǫxǫy − ηǫz) 2(ǫxǫz + ηǫy)
2(ǫxǫy + ηǫz) 2(η2 + ǫ2y) − 1 2(ǫyǫz − ηǫx)
2(ǫxǫz − ηǫy) 2(ǫyǫz + ηǫx) 2(η2 + ǫ2z) − 1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Inverse problem
⋆ Given
R =
r11 r12 r13r21 r22 r23r31 r32 r33
the quaternion is (η ≥ 0)
η =1
2
√r11 + r22 + r33 + 1
ǫ =1
2
sgn (r32 − r23)√r11 − r22 − r33 + 1
sgn (r13 − r31)√r22 − r33 − r11 + 1
sgn (r21 − r12)√r33 − r11 − r22 + 1
• quaternion extracted fromR−1 = RT
Q−1 = {η,−ǫ}
• quaternion product
Q1 ∗ Q2 = {η1η2 − ǫT1 ǫ2, η1ǫ2 + η2ǫ1 + ǫ1 × ǫ2}

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
HOMOGENEOUS TRANSFORMATIONS
• Coordinate transformation (translation + rotation)
p0 = o01 + R0
1p1
• Inverse transformation
p1 = −R10o
01 + R1
0p0

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Homogeneous representation
p̃ =
p
1
• Homogeneous transformation matrix
A01 =
R01 o0
1
0T 1
• Coordinate transformation
p̃0 = A01p̃
1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Inverse transformation
p̃1 = A10p̃
0 =(
A01
)−1p̃0
ove
A10 =
R10 −R1
0o01
0T 1
A−1 6= AT
• Sequence of coordinate transformations
p̃0 = A01A
12 . . .A
n−1n p̃n

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
DIRECT KINEMATICS
• Manipulator
⋆ series oflinks connected by means ofjoints
• Kinematic chain (from base to end-effector)
⋆ open (only one sequence)
⋆ closed (loop)
• Degree of freedom
⋆ associated with a joint articulation =joint variable

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Base frame and end-effector frame
• Direct kinematics equation
T be (q) =
nbe(q) sbe(q) abe(q) pbe(q)
0 0 0 1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Two-link planar arm
T be (q) =
nbe sbe abe pbe
0 0 0 1
=
0 s12 c12 a1c1 + a2c120 −c12 s12 a1s1 + a2s121 0 0 00 0 0 1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Open chain
T 0n (q) = A0
1(q1)A12(q2) . . .A
n−1n (qn)
T be (q) = T b
0 T 0n (q)T n
e

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Denavit–Hartenberg convention
• choose axiszi along axis of Jointi+ 1
• locateOi at the intersection of axiszi with the common normalto axeszi−1 andzi, andO′
i at intersection of common normalwith axiszi−1
• choose axisxi along common the normal to axeszi−1 andziwith positive direction from Jointi to Jointi+ 1
• choose axisyi so as to complete right-handed frame

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Nonunique definition of link frame:
⋆ for Frame0, only the direction of axisz0 is specified:thenO0 andx0 can be chosen arbitrarily
⋆ for Framen, since there is no Jointn+1, zn is not uniquelydefined whilexn has to be normal to axiszn−1); typicallyJointn is revolute and thuszn can be aligned withzn−1
⋆ when two consecutive axes are parallel, the common normalbetween them is not uniquely defined
⋆ when two consecutive axes intersect, the positive directionof xi is arbitrary
⋆ when Jointi is prismatic, only the direction ofzi−1 isspecified

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Denavit–Hartenberg parameters
ai distance betweenOi andO′
i;
di coordinate ofO′
i alongzi−1;
αi angle between axeszi−1 andzi about axisxi to be taken positivewhen rotation is made counter-clockwise
ϑi angle between axesxi−1 andxi about axiszi−1 to be takenpositive when rotation is made counter-clockwise
• ai andαi are always constant
• if Joint i is revolute the variable isϑi
• if Joint i is prismatic the variable isdi

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Coordinate transformation
Ai−1
i′ =
cϑi−sϑi
0 0sϑi
cϑi0 0
0 0 1 di0 0 0 1
Ai′
i =
1 0 0 ai0 cαi
−sαi0
0 sαicαi
00 0 0 1
Ai−1
i (qi) = Ai−1
i′ Ai′
i =
cϑi−sϑi
cαisϑi
sαiaicϑi
sϑicϑicαi
−cϑisαi
aisϑi
0 sαicαi
di0 0 0 1
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
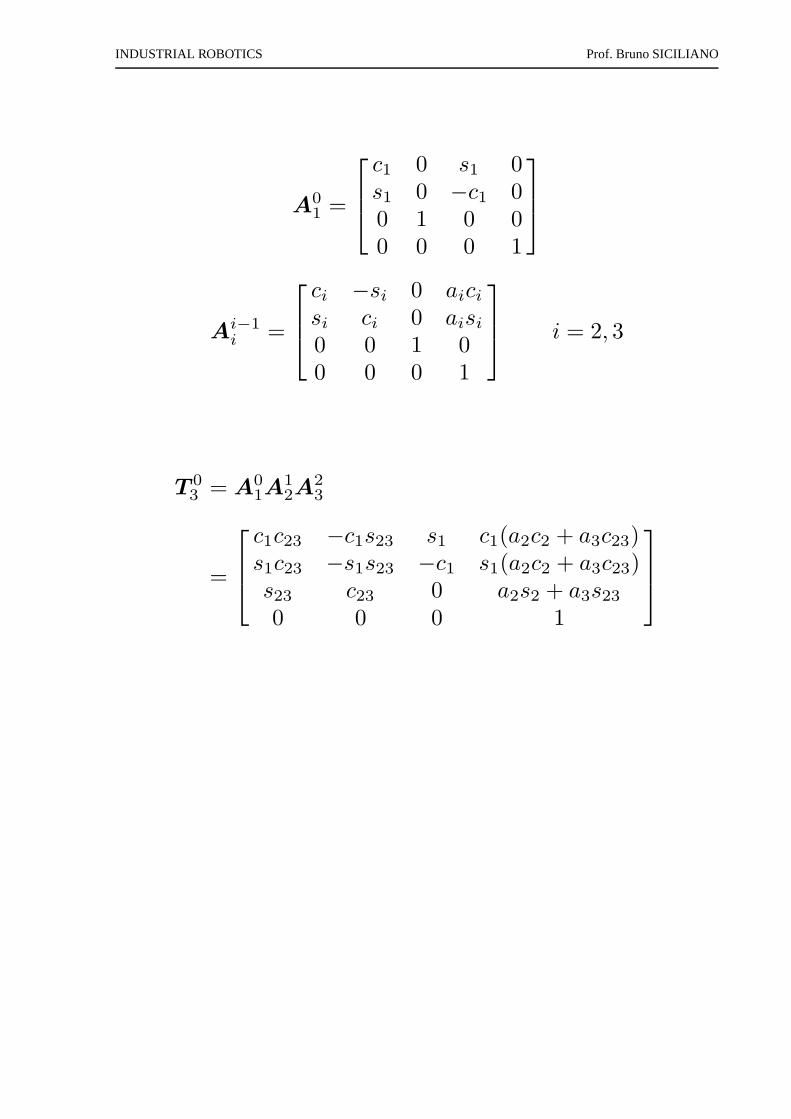
Procedure
1. Find and number consecutively the joint axes; set the directionsof axesz0, . . . , zn−1
2. Choose Frame0 by locating the origin on axisz0; axesx0 andy0 are chosen so as to obtain a right-handed frame. If feasible,it is worth choosing Frame0 to coincide with the base frame
Execute steps from3 to 5 for i = 1, . . . , n− 1:
3. Locate the originOi at the intersection ofzi with the commonnormal to axeszi−1 andzi. If axeszi−1 andzi are parallel andJoint i is revolute, then locateOi so thatdi = 0; if Joint i isprismatic, locateOi at a reference position for the joint range,e.g., a mechanical limit
4. Choose axisxi along the common normal to axeszi−1 andziwith direction from Jointi to Jointi+ 1
5. Choose axisyi so as to obtain a right-handed frame
To complete:
6. Choose Framen; if Jointn is revolute, then alignzn with zn−1,otherwise, if Jointn is prismatic, then choosezn arbitrarily.Axis xn is set according to step4
7. For i = 1, . . . , n, form the table of parametersai, di, αi, ϑi
8. On the basis of the parameters in7, compute the homogeneoustransformation matricesAi−1
i (qi) for i = 1, . . . , n
9. Compute the homogeneous transformationT 0n (q) =
A01 . . .A
n−1n that yields the position and orientation of Framen
with respect to Frame0
10. GivenT b0 andT n
e , compute the direct kinematics function asT be (q) = T b
0 T 0nT n
e that yields the position and orientation ofthe end-effector frame with respect to the base frame

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Three–link planar arm

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Link ai αi di ϑi
1 a1 0 0 ϑ1
2 a2 0 0 ϑ2
3 a3 0 0 ϑ3

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Ai−1
i =
ci −si 0 aicisi ci 0 aisi0 0 1 00 0 0 1
i = 1, 2, 3
T 03 = A0
1A12A
23
=
c123 −s123 0 a1c1 + a2c12 + a3c123s123 c123 0 a1s1 + a2s12 + a3s1230 0 1 00 0 0 1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Spherical arm

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Link ai αi di ϑi
1 0 −π/2 0 ϑ1
2 0 π/2 d2 ϑ2
3 0 0 d3 0

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
A01 =
c1 0 −s1 0s1 0 c1 00 −1 0 00 0 0 1
A1
2 =
c2 0 s2 0s2 0 −c2 00 1 0 d2
0 0 0 1
A23 =
1 0 0 00 1 0 00 0 1 d3
0 0 0 1
T 03 = A0
1A12A
23
=
c1c2 −s1 c1s2 c1s2d3 − s1d2
s1c2 c1 s1s2 s1s2d3 + c1d2
−s2 0 c2 c2d3
0 0 0 1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
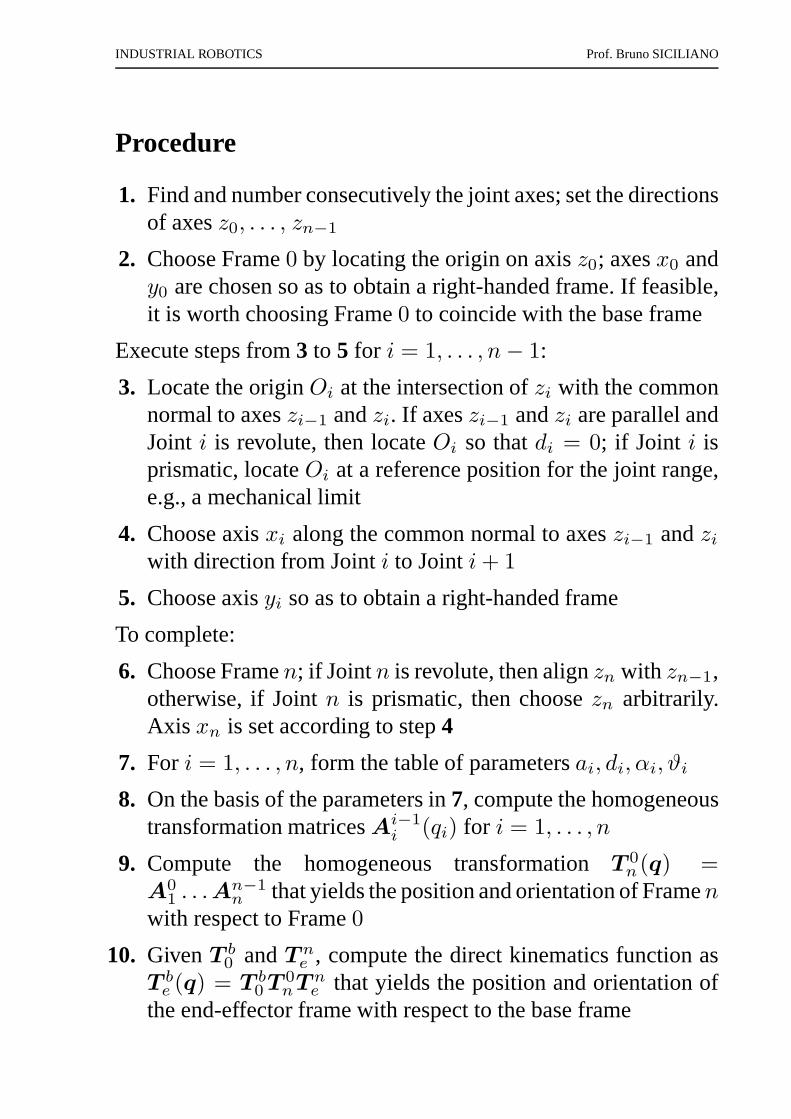
Anthropomorphic arm

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Link ai αi di ϑi
1 0 π/2 0 ϑ1
2 a2 0 0 ϑ2
3 a3 0 0 ϑ3
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
A01 =
c1 0 s1 0s1 0 −c1 00 1 0 00 0 0 1
Ai−1
i =
ci −si 0 aicisi ci 0 aisi0 0 1 00 0 0 1
i = 2, 3
T 03 = A0
1A12A
23
=
c1c23 −c1s23 s1 c1(a2c2 + a3c23)s1c23 −s1s23 −c1 s1(a2c2 + a3c23)s23 c23 0 a2s2 + a3s230 0 0 1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
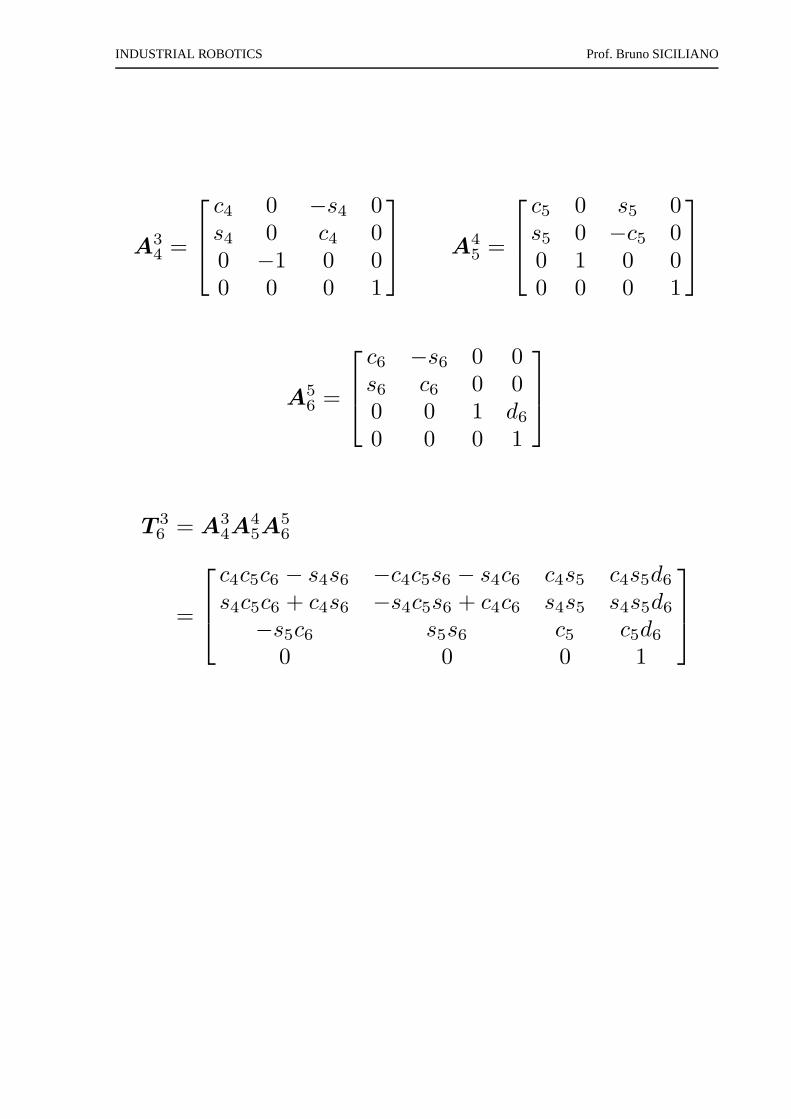
Spherical wrist

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Link ai αi di ϑi
4 0 −π/2 0 ϑ4
5 0 π/2 0 ϑ5
6 0 0 d6 ϑ6
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
A34 =
c4 0 −s4 0s4 0 c4 00 −1 0 00 0 0 1
A4
5 =
c5 0 s5 0s5 0 −c5 00 1 0 00 0 0 1
A56 =
c6 −s6 0 0s6 c6 0 00 0 1 d6
0 0 0 1
T 36 = A3
4A45A
56
=
c4c5c6 − s4s6 −c4c5s6 − s4c6 c4s5 c4s5d6
s4c5c6 + c4s6 −s4c5s6 + c4c6 s4s5 s4s5d6
−s5c6 s5s6 c5 c5d6
0 0 0 1
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
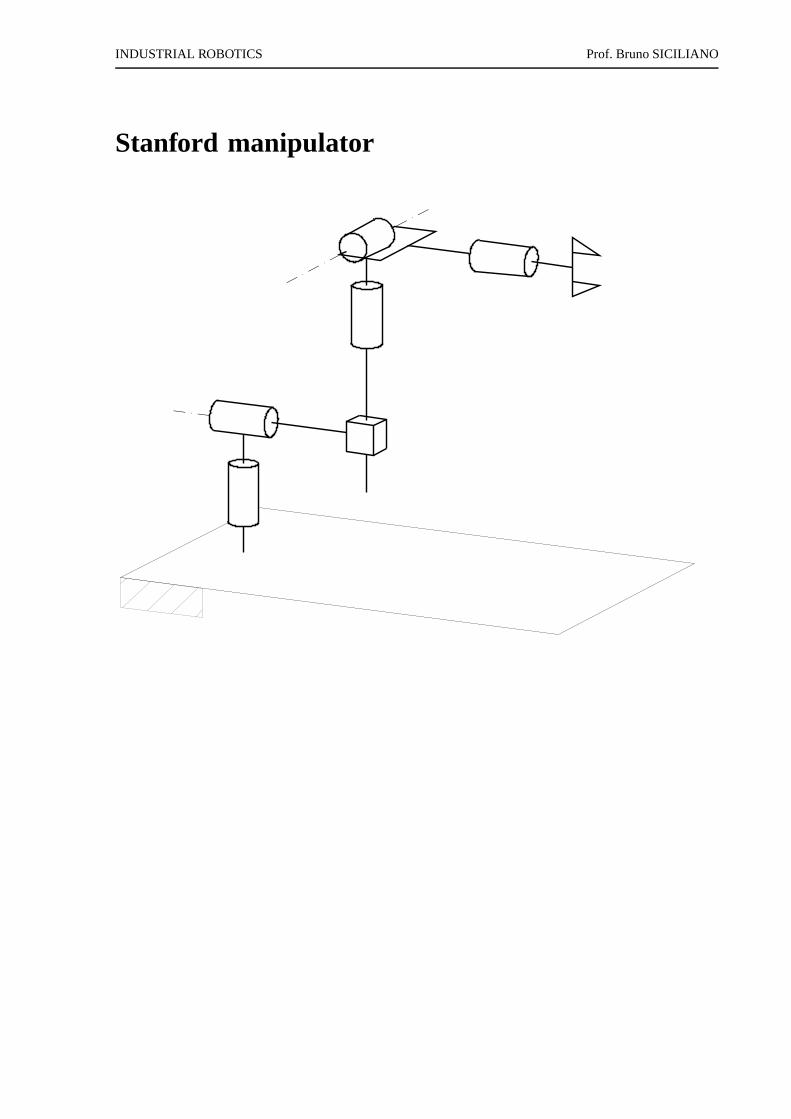
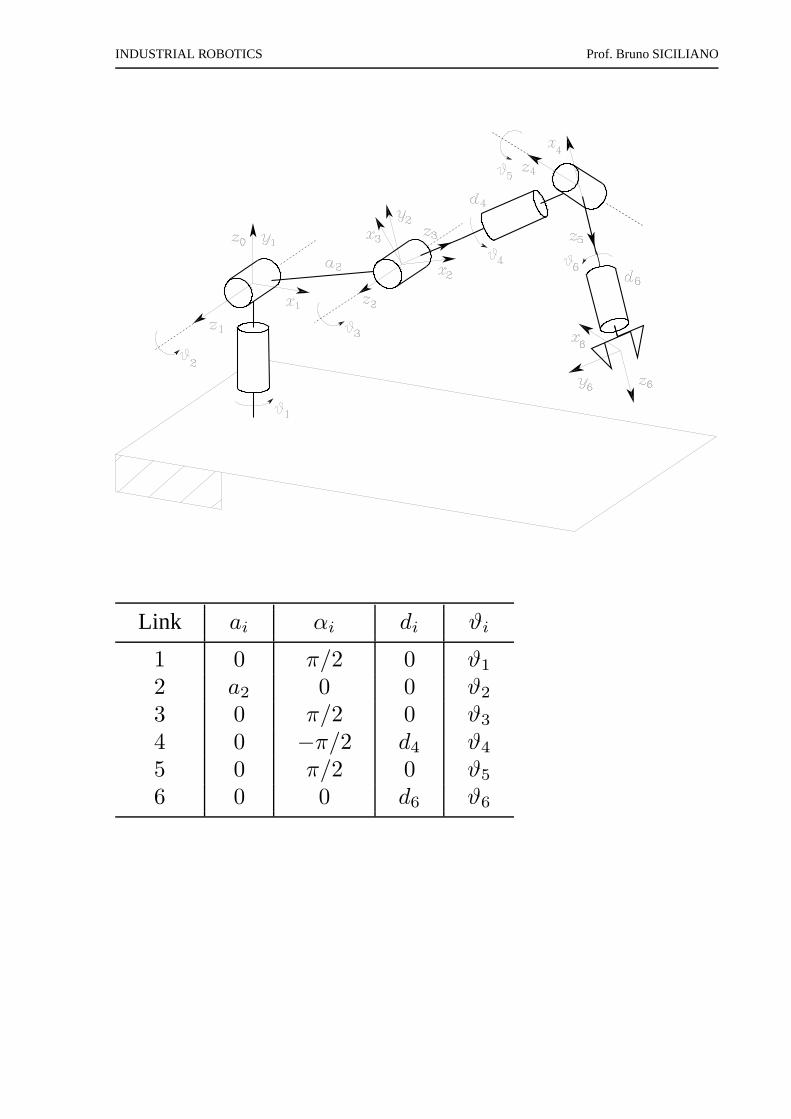
Stanford manipulator

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
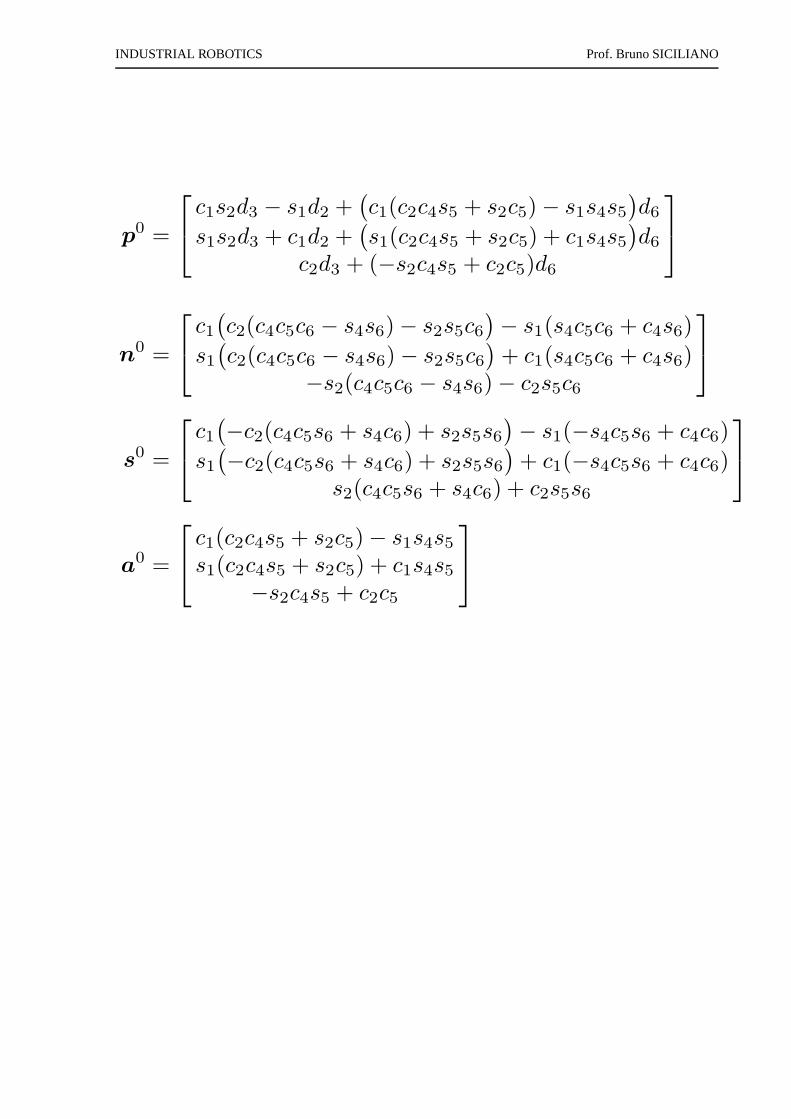
T 06 = T 0
3 T 36 =
n0 s0 a0 p0
0 0 0 1
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
p0 =
c1s2d3 − s1d2 +(
c1(c2c4s5 + s2c5) − s1s4s5)
d6
s1s2d3 + c1d2 +(
s1(c2c4s5 + s2c5) + c1s4s5)
d6
c2d3 + (−s2c4s5 + c2c5)d6
n0 =
c1(
c2(c4c5c6 − s4s6) − s2s5c6)
− s1(s4c5c6 + c4s6)
s1(
c2(c4c5c6 − s4s6) − s2s5c6)
+ c1(s4c5c6 + c4s6)−s2(c4c5c6 − s4s6) − c2s5c6
s0 =
c1(
−c2(c4c5s6 + s4c6) + s2s5s6)
− s1(−s4c5s6 + c4c6)
s1(
−c2(c4c5s6 + s4c6) + s2s5s6)
+ c1(−s4c5s6 + c4c6)s2(c4c5s6 + s4c6) + c2s5s6
a0 =
c1(c2c4s5 + s2c5) − s1s4s5s1(c2c4s5 + s2c5) + c1s4s5
−s2c4s5 + c2c5

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Anthropomorphic arm with spherical wrist
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Link ai αi di ϑi
1 0 π/2 0 ϑ1
2 a2 0 0 ϑ2
3 0 π/2 0 ϑ3
4 0 −π/2 d4 ϑ4
5 0 π/2 0 ϑ5
6 0 0 d6 ϑ6

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
A23 =
c3 0 s3 0s3 0 −c3 00 1 0 00 0 0 1
A3
4 =
c4 0 −s4 0s4 0 c4 00 −1 0 d4
0 0 0 1
p0 =
a2c1c2 + d4c1s23 + d6
(
c1(c23c4s5 + s23c5) + s1s4s5)
a2s1c2 + d4s1s23 + d6
(
s1(c23c4s5 + s23c5) − c1s4s5)
a2s2 − d4c23 + d6(s23c4s5 − c23c5)
n0 =
c1(
c23(c4c5c6 − s4s6) − s23s5c6)
+ s1(s4c5c6 + c4s6)
s1(
c23(c4c5c6 − s4s6) − s23s5c6)
− c1(s4c5c6 + c4s6)s23(c4c5c6 − s4s6) + c23s5c6
s0 =
c1(
−c23(c4c5s6 + s4c6) + s23s5s6)
+ s1(−s4c5s6 + c4c6)
s1(
−c23(c4c5s6 + s4c6) + s23s5s6)
− c1(−s4c5s6 + c4c6)−s23(c4c5s6 + s4c6) − c23s5s6
a0 =
c1(c23c4s5 + s23c5) + s1s4s5s1(c23c4s5 + s23c5) − c1s4s5
s23c4s5 − c23c5

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
DLR manipulator
Link ai αi di ϑi
1 0 π/2 0 ϑ1
2 0 π/2 0 ϑ2
3 0 π/2 d3 ϑ3
4 0 π/2 0 ϑ4
5 0 π/2 d5 ϑ5
6 0 π/2 0 ϑ6
7 0 0 d7 ϑ7

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Ai−1
i =
ci 0 si 0
si 0 −ci 0
0 1 0 di
0 0 0 1
i = 1, . . . , 6
A67 =
c7 −s7 0 0
s7 c7 0 0
0 0 1 d7
0 0 0 1
p07 =
d3xd3 + d5xd5 + d7xd7d3yd3 + d5yd5 + d7yd7d3zd3 + d5zd5 + d7zd7
xd3 = c1s2
xd5 = c1(c2c3s4 − s2c4) + s1s3s4
xd7 = c1(c2k1 + s2k2) + s1k3
yd3 = s1s2
yd5 = s1(c2c3s4 − s2c4) − c1s3s4
yd7 = s1(c2k1 + s2k2) − c1k3
zd3 = −c2zd5 = c2c4 + s2c3s4
zd7 = s2(c3(c4c5s6 − s4c6) + s3s5s6) − c2k2
k1 = c3(c4c5s6 − s4c6) + s3s5s6
k2 = s4c5s6 + c4c6
k3 = s3(c4c5s6 − s4c6) − c3s5s6

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
n07 =
((xac5 + xcs5)c6 + xbs6)c7 + (xas5 − xcc5)s7((yac5 + ycs5)c6 + ybs6)c7 + (yas5 − ycc5)s7
(zac6 + zcs6)c7 + zbs7
s07 =
−((xac5 + xcs5)c6 + xbs6)s7 + (xas5 − xcc5)c7−((yac5 + ycs5)c6 + ybs6)s7 + (yas5 − ycc5)c7
−(zac6 + zcs6)s7 + zbc7
a07 =
(xac5 + xcs5)s6 − xbc6(yac5 + ycs5)s6 − ybc6
zas6 − zcc6
xa = (c1c2c3 + s1s3)c4 + c1s2s4
xb = (c1c2c3 + s1s3)s4 − c1s2c4
xc = c1c2s3 − s1c3
ya = (s1c2c3 − c1s3)c4 + s1s2s4
yb = (s1c2c3 − c1s3)s4 − s1s2c4
yc = s1c2s3 + c1c3
za = (s2c3c4 − c2s4)c5 + s2s3s5
zb = (s2c3s4 + c2c4)s5 − s2s3c5
zc = s2c3s4 + c2c4
⋆ seα7 = π/2
A67 =
c7 0 s7 a7c7
s7 0 −c7 a7s7
0 0 1 0
0 0 0 1

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Humanoid manipulator
• Arms consisting of two DLR manipulators (α7 = π/2)
• Connecting device between the end-effector of the anthropomorphictorso and the base frames of the two manipulators
⋆ permits keeping the ‘chest’ of the humanoid manipulatoralways orthogonal to the ground (ϑ4 = −ϑ2 − ϑ3)
• Direct kinematics
T 0rh = T 0
3 T 3t T t
rTrrh
T 0lh = T 0
3 T 3t T t
l Tllh
T 3t =
c23 s23 0 0−s23 c23 0 0
0 0 1 00 0 0 1
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
⋆ T 03 like for anthropomorphic manipulator
⋆ T tr andT t
l depend onβ
⋆ T rrh andT l
lh like for DLR manipulator
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
JOINT SPACE AND OPERATIONAL SPACE
• Joint space
q =
q1...qn
⋆ qi = ϑi (revolute joint)
⋆ qi = di (prismatic joint)
• Operational space
x =
[
p
φ
]
⋆ p (position)
⋆ φ (orientation)
• Direct kinematics equation
x = k(q)

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Example
x =
pxpyφ
= k(q) =
a1c1 + a2c12 + a3c123a1s1 + a2s12 + a3s123
ϑ1 + ϑ2 + ϑ3

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Workspace
• Reachable workspace
p = p(q) qim ≤ qi ≤ qiM i = 1, . . . , n
⋆ surface elements of planar, spherical, toroidal andcylindrical type
• Dexterous workspace
⋆ different orientations

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Example
⋆ admissible configurations

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
⋆ workspace
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Accuracy
⋆ deviation between the position reached in the assignedposture and the position computed via direct kinematics
⋆ typical values:(0.2, 1) mm
• Repeatability
⋆ measure of manipulator’s ability to return to a previouslyreached position
⋆ typical values:(0.02, 0.2) mm
• Kinematic redundancy
⋆ m < n (intrinsic)
⋆ r < m = n (functional)

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
KINEMATIC CALIBRATION
• Accurate estimates of DH parameters to improve manipulatoraccuracy
• Direct kinematics equation as a function of all parameters
x = k(a,α,d,ϑ)
xm measured pose
xn nominal pose (fixed parameters + joint variables)
∆x =∂k
∂a∆a +
∂k
∂α∆α +
∂k
∂d∆d +
∂k
∂ϑ∆ϑ
= Φ(ζn)∆ζ
INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
⋆ l measurements (lm≫ 4n)
∆x̄ =
∆x1
...∆xl
=
Φ1
...Φl
∆ζ = Φ̄∆ζ
• Solution
∆ζ = (Φ̄T Φ̄)−1Φ̄T∆x̄
ζ′ = ζn +∆ζ
. . .until ∆ζ converges
⋆ more accurate estimates of fixed parameters
⋆ corrections on transducers measurements
Start-up
• (Home) reference posture

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
INVERSE KINEMATICS PROBLEM
• Direct kinematics
⋆ q =⇒ T
⋆ q =⇒ x
• Inverse kinematics
⋆ T =⇒ q
⋆ x =⇒ q
• Complexity
⋆ closed-form solution
⋆ multiple solutions
⋆ infinite solutions
⋆ no admissible solutions
• Intuition
⋆ algebraic
⋆ geometric
• Numerical techniques

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Solution of three–link planar arm
• Algebraic solution
φ = ϑ1 + ϑ2 + ϑ3
pWx = px − a3cφ = a1c1 + a2c12
pWy = py − a3sφ = a1s1 + a2s12

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
c2 =p2Wx + p2
Wy − a21 − a2
2
2a1a2
s2 = ±√
1 − c22
ϑ2 = Atan2(s2, c2)
s1 =(a1 + a2c2)pWy − a2s2pWx
p2Wx + p2
Wy
c1 =(a1 + a2c2)pWx + a2s2pWy
p2Wy + p2
Wy
ϑ1 = Atan2(s1, c1)
ϑ3 = φ− ϑ1 − ϑ2

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
• Geometric solution
c2 =p2Wx + p2
Wy − a21 − a2
2
2a1a2
.
ϑ2 = cos−1(c2)
α = Atan2(pWy, pWx)
cβ
√
p2Wx + p2
Wy = a1 + a2c2
β = cos−1
p2Wx + p2
Wy + a21 − a2
2
2a1
√
p2Wx + p2
Wy
ϑ1 = α± β

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Solution of manipulators with spherical wrist
pW = p − d6a
• Decoupled solution
⋆ compute wrist positionpW (q1, q2, q3)
⋆ solve inverse kinematics for(q1, q2, q3)
⋆ computeR03(q1, q2, q3)
⋆ computeR36(ϑ4, ϑ5, ϑ6) = R0
3TR
⋆ solve inverse kinematics for orientation(ϑ4, ϑ5, ϑ6)

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Solution of spherical arm
(A01)
−1T 03 = A1
2A23
p1W =
pWxc1 + pWys1−pWz
−pWxs1 + pWyc1
=
d3s2−d3c2d2

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
c1 =1 − t2
1 + t2s1 =
2t
1 + t2
(d2 + pWy)t2 + 2pWxt+ d2 − pWy = 0
ϑ1 = 2Atan2(
−pWx ±√
p2Wx + p2
Wy − d22, d2 + pWy
)
pWxc1 + pWys1−pWz
=d3s2−d3c2
ϑ2 = Atan2(pWxc1 + pWys1, pWz)
d3 =√
(pWxc1 + pWys1)2 + p2Wz

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Solution of anthropomorphic arm
pWx = c1(a2c2 + a3c23)
pWy = s1(a2c2 + a3c23)
pWz = a2s2 + a3s23
c3 =p2Wx + p2
Wy + p2Wz − a2
2 − a23
2a2a3
s3 = ±√
1 − c23
ϑ3 = Atan2(s3, c3)
⇓

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
ϑ3,I ∈ [−π, π]
ϑ3,II = −ϑ3,I

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
c2 =±
√
p2Wx + p2
Wy(a2 + a3c3) + pWza3s3
a22 + a2
3 + 2a2a3c3
s2 =pWz(a2 + a3c3) ∓
√
p2Wx + p2
Wya3s3
a22 + a2
3 + 2a2a3c3
ϑ2 = Atan2(s2, c2)
⇓
⋆ for s+3 =√
1 − c23:
ϑ2,I = Atan2(
(a2 + a3c3)pWz − a3s+
3
√
p2Wx + p2
Wy,
(a2 + a3c3)√
p2Wx + p2
Wy + a3s+
3 pWz
)
ϑ2,II = Atan2(
(a2 + a3c3)pWz + a3s+
3
√
p2Wx + p2
Wy,
−(a2 + a3c3)√
p2Wx + p2
Wy + a3s+3 pWz
)
⋆ for s−3 = −√
1 − c23:
ϑ2,III = Atan2(
(a2 + a3c3)pWz − a3s−
3
√
p2Wx + p2
Wy,
(a2 + a3c3)√
p2Wx + p2
Wy + a3s−
3 pWz
)
ϑ2,IV = Atan2(
(a2 + a3c3)pWz + a3s−
3
√
p2Wx + p2
Wy,
−(a2 + a3c3)√
p2Wx + p2
Wy + a3s−
3 pWz
)

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
ϑ1,I = Atan2(pWy, pWx)
ϑ1,II = Atan2(−pWy,−pWx)
• Four admissible configurations
(ϑ1,I , ϑ2,I , ϑ3,I) (ϑ1,I , ϑ2,III , ϑ3,II)
(ϑ1,II , ϑ2,II , ϑ3,I) (ϑ1,II , ϑ2,IV , ϑ3,II)
⋆ infinite solutions (kinematic singularity)
pWx = 0 pWy = 0

INDUSTRIAL ROBOTICS Prof. Bruno SICILIANO
Solution of spherical wrist
R36 =
n3x s3x a3
x
n3y s3y a3
y
n3z s3z a3
z
ϑ4 = Atan2(a3y, a
3x)
ϑ5 = Atan2(√
(a3x)
2 + (a3y)
2, a3z
)
ϑ6 = Atan2(s3z,−n3z)
ϑ4 = Atan2(−a3y,−a3
x)
ϑ5 = Atan2(
−√
(a3x)
2 + (a3y)
2, a3z
)
ϑ6 = Atan2(−s3z, n3z)