
Robust Control
285
Robust Control References: 1. K. Zhou, and J. C. Doyle, Essentials of Robust Control, Prentice-Hall, Inc., 1998 2. S. Skogestad, and I. Postlethwaite, Multivariable Feedback Control: Analysis and Design, John Wiley & Sons Ltd., 1996 1
description
About robust control
Transcript of Robust Control
Robust Control
References:
1. K. Zhou, and J. C. Doyle,Essentials of Robust Control,
Prentice-Hall, Inc., 1998
2. S. Skogestad, and I. Postlethwaite,Multivariable Feedback Control:
Analysis and Design, John Wiley & Sons Ltd., 1996
1
Introduction
1. Why Robust Control?Models are uncertain.
• Real environments of a control system may change and operatingconditions may vary from time to time.
• Even if the environment does not change, other factors are themodel uncertainties as well as noises.
• Any mathematical representation of a system often involvessimplifying assumptions. Nonlinearities are either unknown andhence unmodeled, or are modeled and later ignored in order tosimplify analysis. High frequency dynamics are often ignored atthe design stage as well.
In consequence, control systems designed based on simplifiedmodels may not work on real plants in real environments.
2
2. Robustness and Robust Control
• Robustness. The property that a control system must maintain
overall system performance despite changes in the plant is called
robustness. Any control system must possess this property for it
to operate properly in realistic situations.
Mathematically, this means that the controller must perform
satisfactorily not just for one plant, but for a family of plants. If a
controller can be designed such that the whole system to be
controlled remains stable when its parameters vary within certain
expected limits, the system is said to possess robust performance.
• Robust Control. The problem of designing controllers that satisfy
both robust stability and performance requirements is called
robust control.
3
3. Scope of Robust ControlSome of the key questions in robust control theory are:
1) Characterizing plant variation. In robust control theory, plant
variation plays a central role. What is a good way to describe
plant variations or uncertainty? Some descriptions attempt to
faithfully describe the variations that might be encountered (e.g.,
probability distributions on physical parameters). Other
descriptions are more convenient for the associated theory(e.g.,
bounds on singular values of transfer matrix errors).
2) Robustness analysis. Given a controller and plant, and some
description of the plant uncertainty, how can we determine such
things as “typical” or “worst-case” performance? How can we
predict the performance degradation caused by variation inthe
plant? How can we verify that some performance specifications
are met for some set of plants?
4
3) Robust controller synthesis. Given a plant and some descriptionof the plant uncertainty, how can we design a controller thatoptimizes “typical” or “worst-case” performance? How can wedesign a controller that meets some performance specificationsfor some set of plants (e.g., all or typical)?
It’s important to remember several things:
• First, these questions were asked, and partial answers obtained,before the term “robust control” was coined.
• Second, the qualifier “robust” shouldn’t be necessary sinceawell-designed controller must be able to tolerate the plantchanges or variations that can be expected. To put it anotherway,a controller that cannot tolerate variations in the plant that will beencountered in operation is simply a poorly-designed controller,not just a non-robust controller. (But the extra qualifier “robust”has helped re-focus attention on this important aspect of controlengineering.)
5
4. Development of Robust Control
• In classical control theory, gain and phase margins are usedtorepresent the robustness of a control system.
• During the development of state-space optimal control in 1960s,control system robustness received less attention, since the idea ofplant change, variation, or uncertainty played at best a secondaryrole.
– Some initial results showed that the state-feedbackimplementation of LQR was very tolerant of changes in theplant. This led to the hope that controllers designed to beoptimal for a fixed, known plant might automatically turn outto be robust, i.e., tolerant to changes in the plant. In a shortnote, Doyle pointed out that this is not the case.
• Robustness re-drew attention in 1980s. One of the most famouscontributions of robust control theory is the development of H∞
controller synthesis.
6
Contents
1. Norms of Signals and Systems
2. Uncertainty and Robustness
3. Performance Specifications
4. Robust Controller Synthesis
5. Model Reduction
6. Robustness Measure
7. Internal Model Control (IMC)
8. Wide-Range Robust Control
7
Chapter 1. Norms of Signals and Systems
A system can be regarded as a ‘gray box’ for manipulating signals. Todescribe the size of signals and systems, we need to work on functionspaces. There are two kinds of functions spaces that we are interested in:
• Linear spaces composed of real functions, especially, functions oftime f (t) with t ∈ R.
• Linear spaces composed of complex functionsF(s) with s∈ C.
Outline of this chapter:
• Vector Spaces
• Function spaces
• Norms of signals
• Norms of systems
8
1.1 Vector Spaces
Let F be a scalar field (it can be taken to be real numbersR, or thecomplex numbersC). SupposeV is a nonempty set, together with a set ofoperations: addition and scalar multiplication, then a linearvector spaceis the 4-tuple{V,F,+, ·} such that the following rules are satisfied for allx,y∈ V andα ,β ∈ F:
1) Commutativity:x+y= y+x
2) Associativity:(x+y)+z= x+(y+z)
α · (β ·x) = (αβ ) ·x
3) Identity: there exists an element 0∈ V and 1∈ F such that
x+0= x, 1·x= x
9
4) Inverse: x∈ V implies that there existsy∈ V such thatx+y= 0.
5) Distributivity:
α · (x+y) = α ·x+β ·y
(α +β ) ·x= α ·x+β ·x
Examples:
• Set of vectors (Rn) over the field of real numberR;
• Set of vectors (Cn) over the filed of complex numberC;
• Set of allm×n matrices (Cm×n) over the filed ofC.
• Set of all functions mapping fromR toRn ( f : R→ Rn) over the
fieldR.
10
1.1.1 Normed SpacesWe can define a norm on a vector space to denote the size of an element.
LetV be a vector space, a real-valued function‖ · ‖ : V→ R is said to be a
norm if it satisfies the following properties for anyx∈ V andy∈ V:
1) ‖x‖ ≥ 0 (positivity).
2) ‖x‖= 0 if and only ifx= 0 (positive definiteness).
3) ‖αx‖= |α |‖x‖ for any scalarα (homogeneity).
4) ‖x+y‖ ≤ ‖x‖+‖y‖ for anyx,y∈ V (triangular inequality).
A vector space together with a norm is called anormed spaceand is
denoted(V,‖ · ‖).A normed space iscompleteif every Cauchy sequence in it converges.
Such a space is referred to as aBanach space.
11
Vector Norms (Norms onCn)
For vector spaceCn, several norms can be defined:
• 1-norm.
‖x‖1 :=n
∑i=1
|xi |
• 2-norm.
‖x‖2 :=
√n
∑i=1
|xi |2
• ∞-norm.‖x‖∞ := max
1≤i≤n|xi |
They are special cases of thep-norm defined as
‖x‖p :=
(n
∑i=1
|xi |p)1/p
12
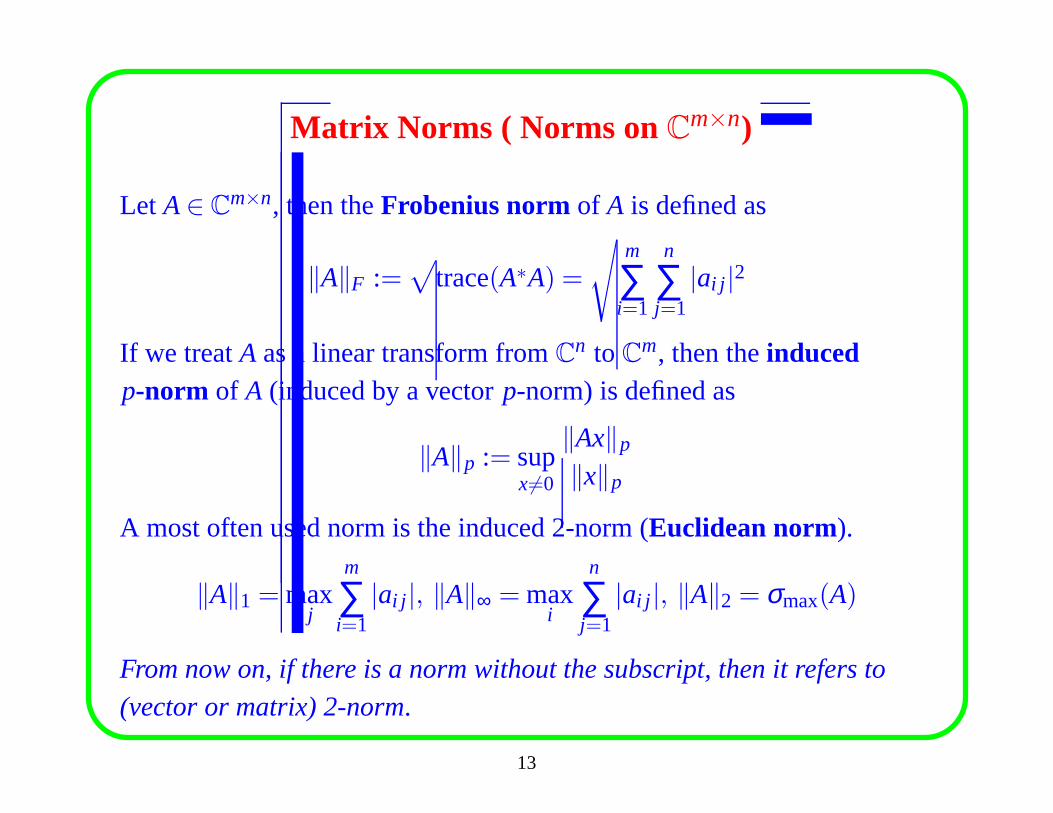
Matrix Norms ( Norms on Cm×n)
Let A∈ Cm×n, then theFrobenius norm of A is defined as
‖A‖F :=√
trace(A∗A) =
√m
∑i=1
n
∑j=1
|ai j |2
If we treatA as a linear transform fromCn toCm, then theinducedp-norm of A (induced by a vectorp-norm) is defined as
‖A‖p := supx 6=0
‖Ax‖p
‖x‖p
A most often used norm is the induced 2-norm (Euclidean norm).
‖A‖1 = maxj
m
∑i=1
|ai j |, ‖A‖∞ = maxi
n
∑j=1
|ai j |, ‖A‖2 = σmax(A)
From now on, if there is a norm without the subscript, then it refers to
(vector or matrix) 2-norm.
13
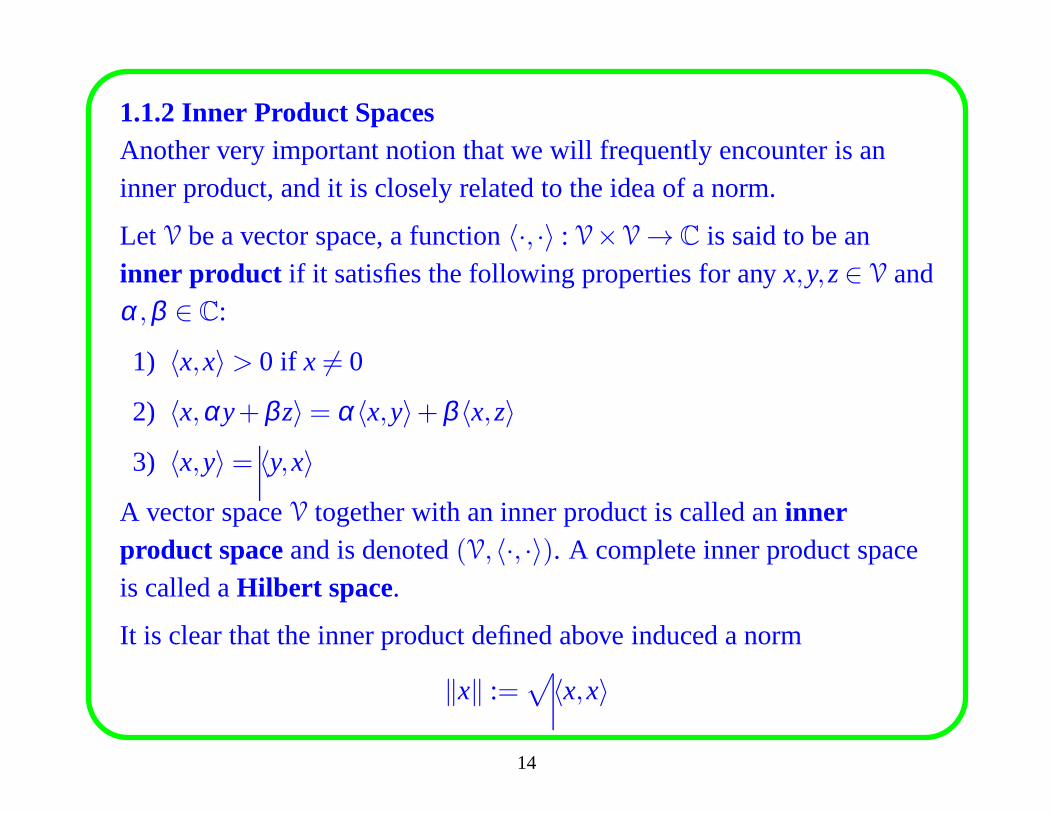
1.1.2 Inner Product SpacesAnother very important notion that we will frequently encounter is aninner product, and it is closely related to the idea of a norm.
Let V be a vector space, a function〈·, ·〉 : V×V→ C is said to be aninner product if it satisfies the following properties for anyx,y,z∈ V andα ,β ∈ C:
1) 〈x,x〉> 0 if x 6= 0
2) 〈x,αy+βz〉= α〈x,y〉+β 〈x,z〉3) 〈x,y〉= 〈y,x〉
A vector spaceV together with an inner product is called aninnerproduct spaceand is denoted(V,〈·, ·〉). A complete inner product spaceis called aHilbert space.
It is clear that the inner product defined above induced a norm
‖x‖ :=√
〈x,x〉
14
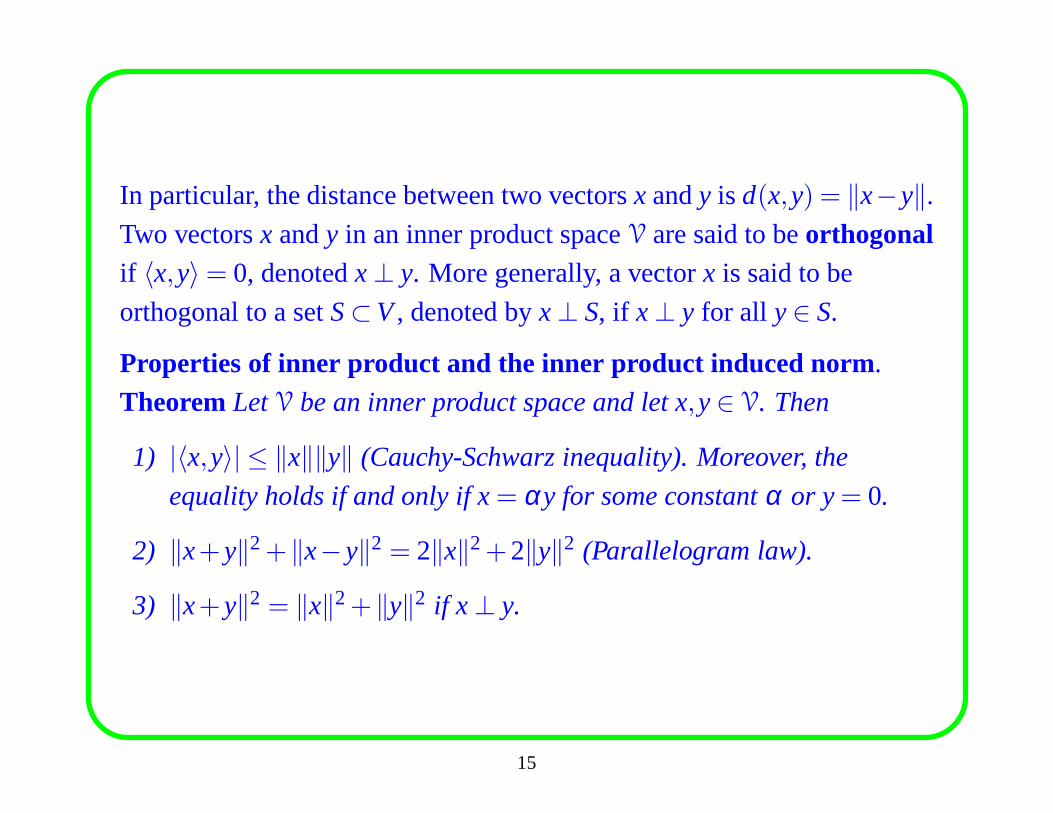
In particular, the distance between two vectorsx andy is d(x,y) = ‖x−y‖.
Two vectorsx andy in an inner product spaceV are said to beorthogonalif 〈x,y〉= 0, denotedx⊥ y. More generally, a vectorx is said to be
orthogonal to a setS⊂V, denoted byx⊥ S, if x⊥ y for all y∈ S.
Properties of inner product and the inner product induced norm .
Theorem LetV be an inner product space and let x,y∈ V. Then
1) |〈x,y〉| ≤ ‖x‖‖y‖ (Cauchy-Schwarz inequality). Moreover, the
equality holds if and only if x= αy for some constantα or y= 0.
2) ‖x+y‖2+‖x−y‖2 = 2‖x‖2+2‖y‖2 (Parallelogram law).
3) ‖x+y‖2 = ‖x‖2+‖y‖2 if x ⊥ y.
15
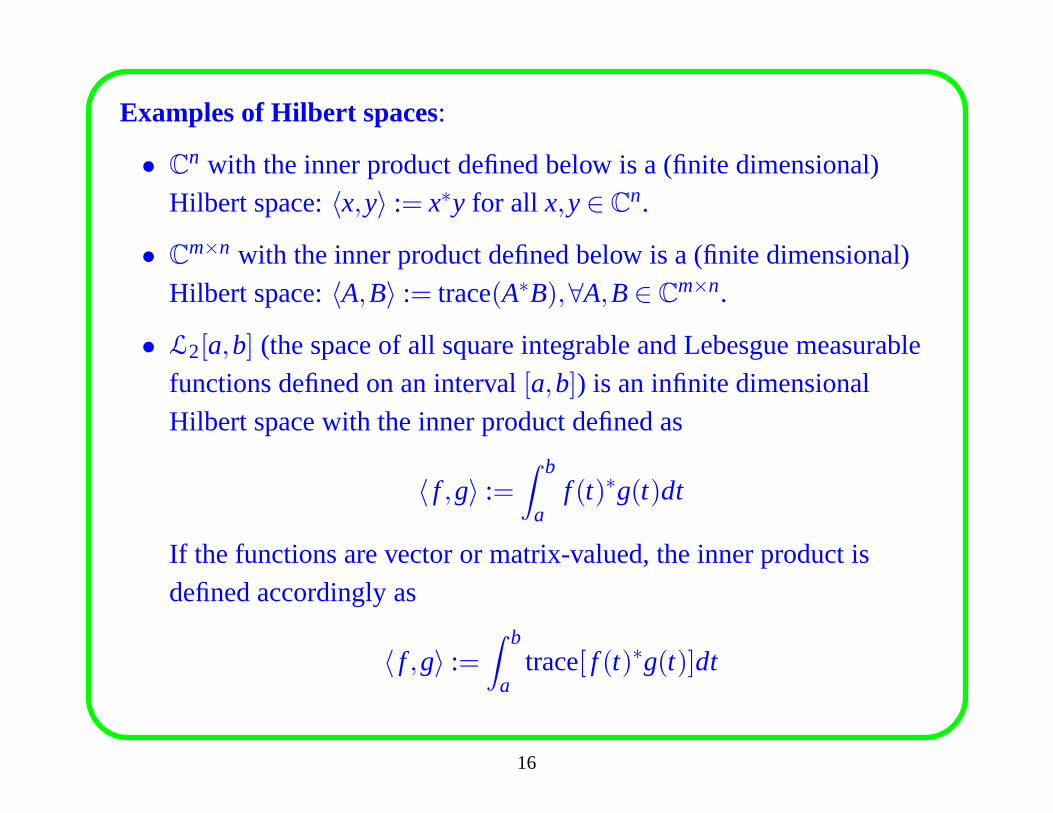
Examples of Hilbert spaces:
• Cn with the inner product defined below is a (finite dimensional)
Hilbert space:〈x,y〉 := x∗y for all x,y∈ Cn.
• Cm×n with the inner product defined below is a (finite dimensional)Hilbert space:〈A,B〉 := trace(A∗B),∀A,B∈ C
m×n.
• L2[a,b] (the space of all square integrable and Lebesgue measurablefunctions defined on an interval[a,b]) is an infinite dimensionalHilbert space with the inner product defined as
〈 f ,g〉 :=∫ b
af (t)∗g(t)dt
If the functions are vector or matrix-valued, the inner product isdefined accordingly as
〈 f ,g〉 :=∫ b
atrace[ f (t)∗g(t)]dt
16
1.2 Time-Domain Spaces
Consider the vector spaceL of all the Lebesgue measurable functions
mappingR toCn. We can define a norm‖ · ‖p as
‖u‖p :=
(∫ ∞
−∞‖u(t)‖p
pdt
)1/p
where‖u(t)‖p is thep-norm onCn. We define the spacesLp(−∞,∞) or
Lp as
Lp(−∞,∞) = {u∈ L such that‖u‖p < ∞}Lp spaces are Banach spaces.
We will useLp+ = Lp[0,∞) to denote the subspace ofLp(−∞,∞) with
functions zero fort < 0, andLp− = Lp(−∞,0] to denote the subspace of
Lp(−∞,∞) with functions zero fort > 0.
17
Some commonly used norms are:
• L1-Norm. (L1 space)
‖u‖1 =∫ ∞
−∞‖u(t)‖1dt =
∫ ∞
−∞
n
∑i=1
|ui(t)|dt =n
∑i=1
‖ui‖1
• L2-Norm. (L2 space)
‖u‖2=
(∫ ∞
−∞‖u(t)‖2
2dt
)1/2
=
(∫ ∞
−∞
n
∑i=1
ui(t)2dt
)1/2
=
(n
∑i=1
‖ui‖22
)1/2
• L∞-Norm. (L∞ space) The norm for the casep= ∞ is defined by
‖u‖∞ := max1≤i≤n
‖ui‖∞ = max1≤i≤n
supt∈R
|ui(t)|
Remark:L2 is an infinite dimensional Hilbert space with inner product
〈 f ,g〉 :=∫ ∞
−∞trace[ f (t)∗g(t)]dt
18
1.2.1 Norms of SignalsA signal can be regarded as a function inL. So with different norms usedwe can measure the ‘size’ of the signals. To illustrate, we consider the
scalar signals.
1. L2-norm of a signalu(t) is
‖u‖2 :=
(∫ ∞
−∞u(t)2dt
)1/2
It reflects thetotal energyof a signal. We often use theroot-mean-square(RMS)value to measure itsaverage power.
‖u‖rms :=
(
limT→0
12T
∫ T
−Tu(t)2dt
)1/2
This is a classical notion of the size of a signal, widely usedin manyareas of engineering.
Properties of RMS value:
19
• RMS is not a norm, since‖u‖rms can be zero whenu is nonzero.
Nevertheless, it is a useful, and often used, measure of a signal’s
size.
• It is known that even if the RMS value of a signal is small, the
signal may occasionally have large peaks, provided the peaks are
not too frequent and do not contain too much energy. In this
sense,‖u‖rms is less affected by large but infrequent values of the
signal.
• The RMS is asteady-statemeasure of a signal; the RMS value of
a signal is not affected by any transient. In particular, a signal with
small RMS value can be very large for some initial time period.
20
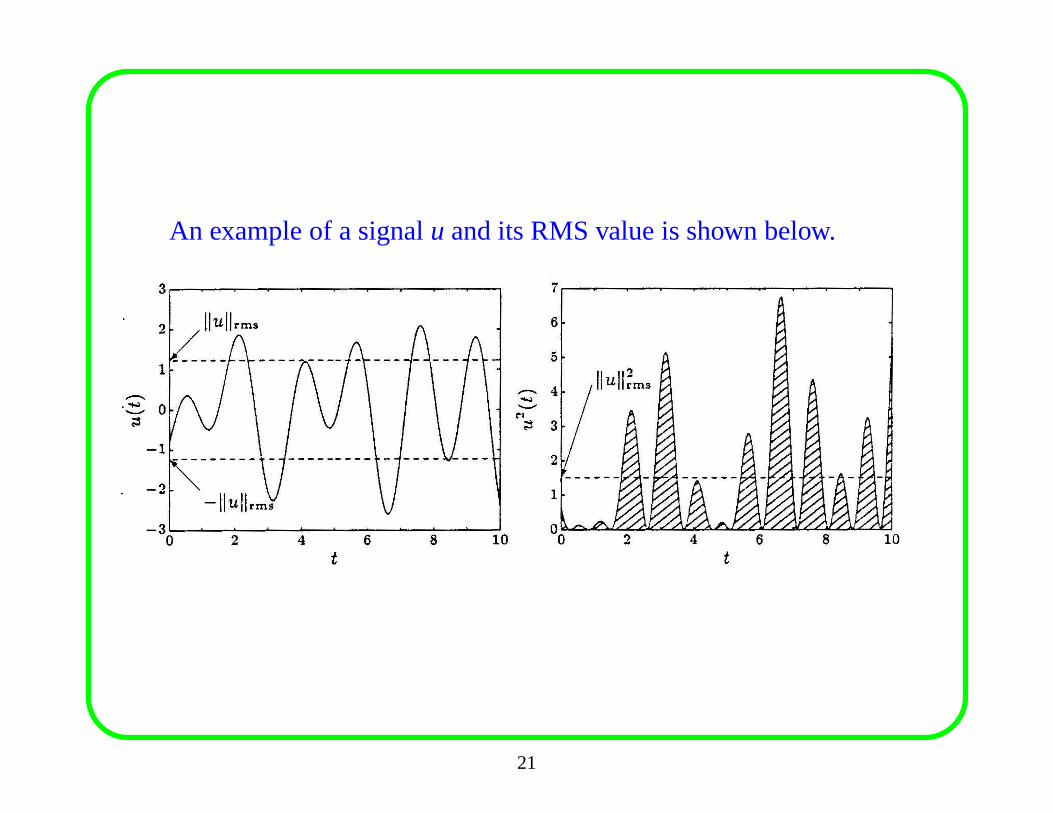
An example of a signalu and its RMS value is shown below.
21
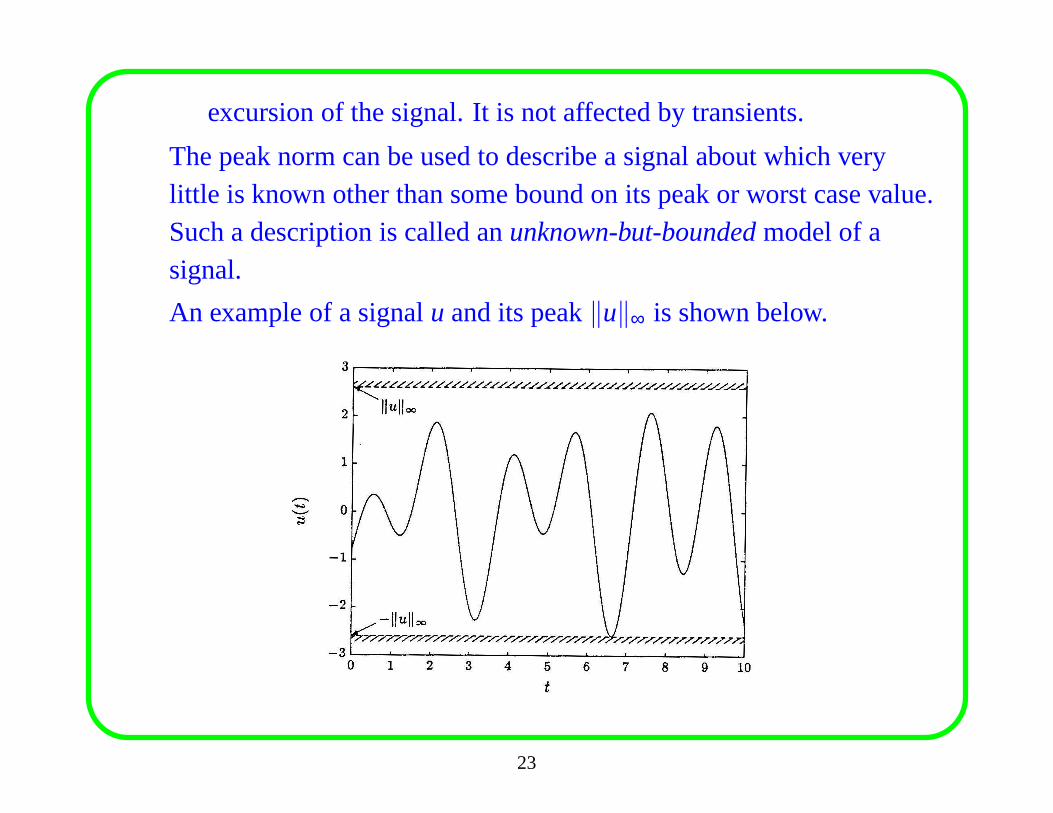
2. L∞-norm of a signal is the least upper bound of its absolute value:
‖u‖∞ := supt∈R
|u(t)|
Physical interpretation of this norm is the signal’s maximum or peakabsolute value, thus it is also calledpeak norm. A variation on thepeak norm is theeventual peakor steady-state peak:
‖u‖ss∞ := limT→∞
supt≥T
|u(t)|
• One simple but strict interpretation of “the signalu is small” isthat it is smallat all times, or equivalently, its maximum or peakabsolute value is small.
• The peak norm of a signal depends entirely on the extreme or
large values the signal takes on. If the signal occasionallyhaslarge values,‖u‖∞ will be large.
• The steady-state peak norm measures only persistent large
22
excursion of the signal. It is not affected by transients.
The peak norm can be used to describe a signal about which verylittle is known other than some bound on its peak or worst casevalue.Such a description is called anunknown-but-boundedmodel of asignal.
An example of a signalu and its peak‖u‖∞ is shown below.
23
3. L1-norm of a signalu(t) is the integral of its absolute value:
‖u‖1 :=∫ ∞
−∞|u(t)|dt
It reflects thetotal resource consumptionor total fuel. We often use
theaverage-absolute valueto measure asteady-state average
resource consumptionor average fuel.
‖u‖aa := limT→0
12T
∫ T
−T|u(t)|dt
This norm puts even less emphasis on large values of a signal.
24
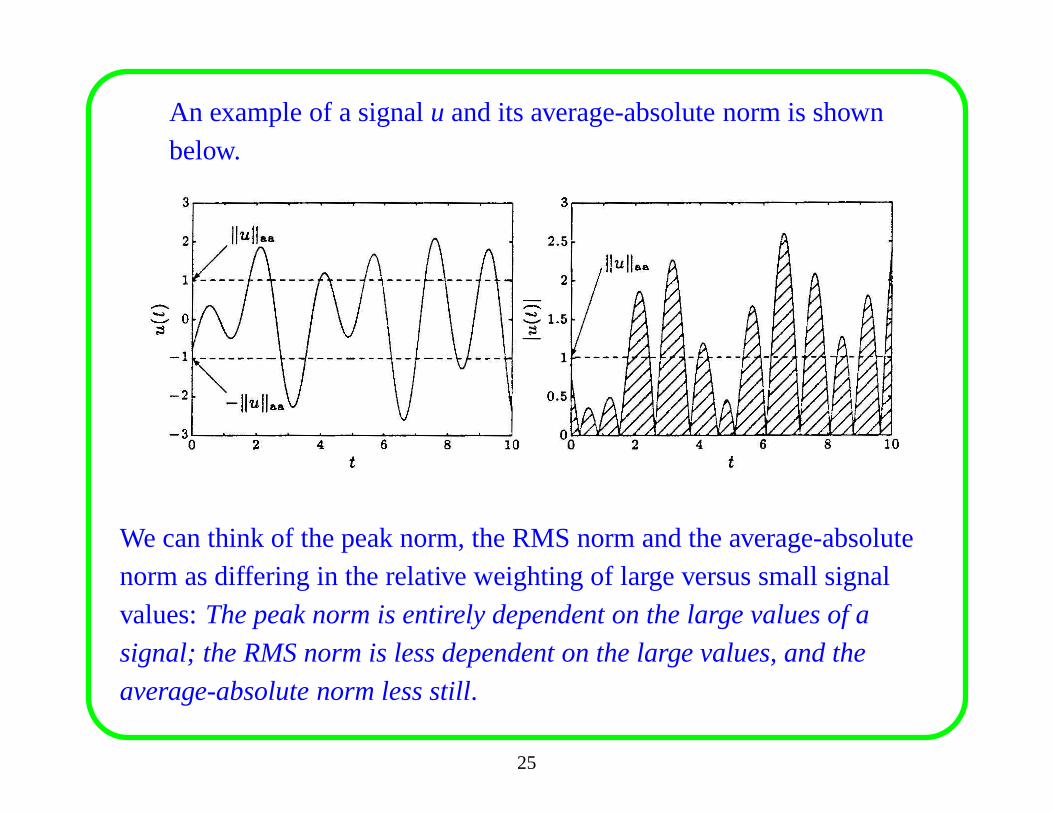
An example of a signalu and its average-absolute norm is shownbelow.
We can think of the peak norm, the RMS norm and the average-absolutenorm as differing in the relative weighting of large versus small signalvalues:The peak norm is entirely dependent on the large values of a
signal; the RMS norm is less dependent on the large values, and the
average-absolute norm less still.
25
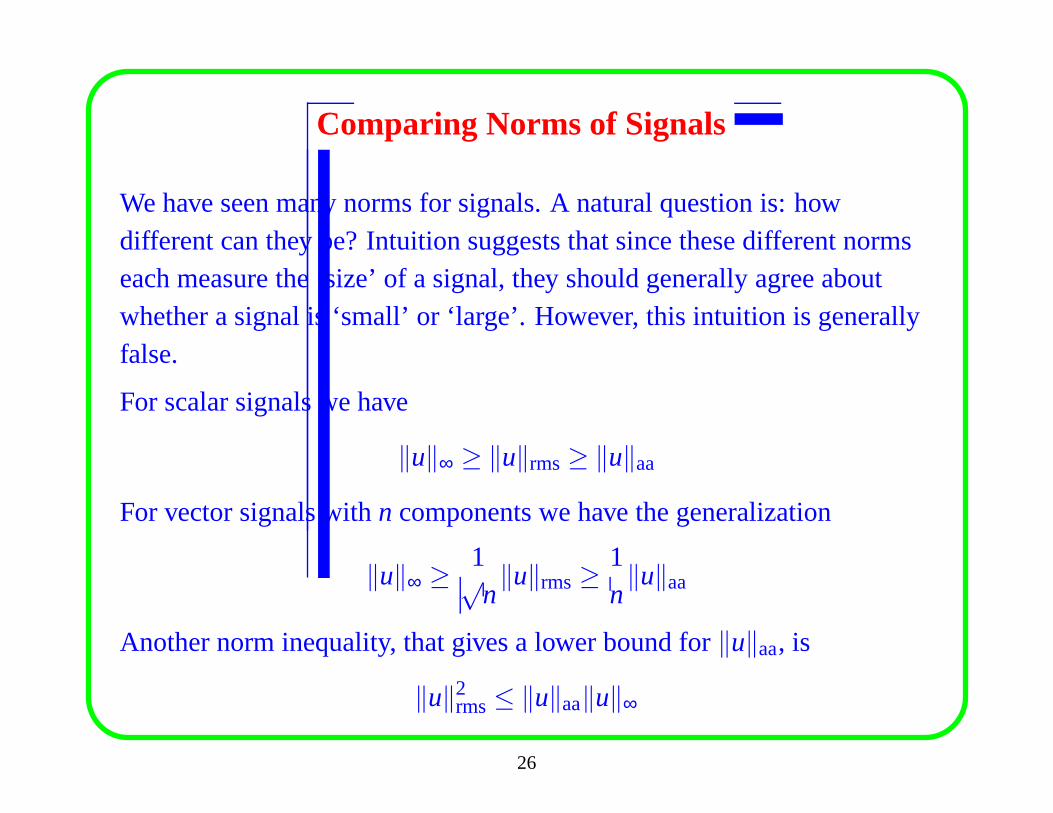
Comparing Norms of Signals
We have seen many norms for signals. A natural question is: howdifferent can they be? Intuition suggests that since these different normseach measure the ‘size’ of a signal, they should generally agree aboutwhether a signal is ‘small’ or ‘large’. However, this intuition is generallyfalse.
For scalar signals we have
‖u‖∞ ≥ ‖u‖rms≥ ‖u‖aa
For vector signals withn components we have the generalization
‖u‖∞ ≥ 1√n‖u‖rms≥
1n‖u‖aa
Another norm inequality, that gives a lower bound for‖u‖aa, is
‖u‖2rms≤ ‖u‖aa‖u‖∞
26
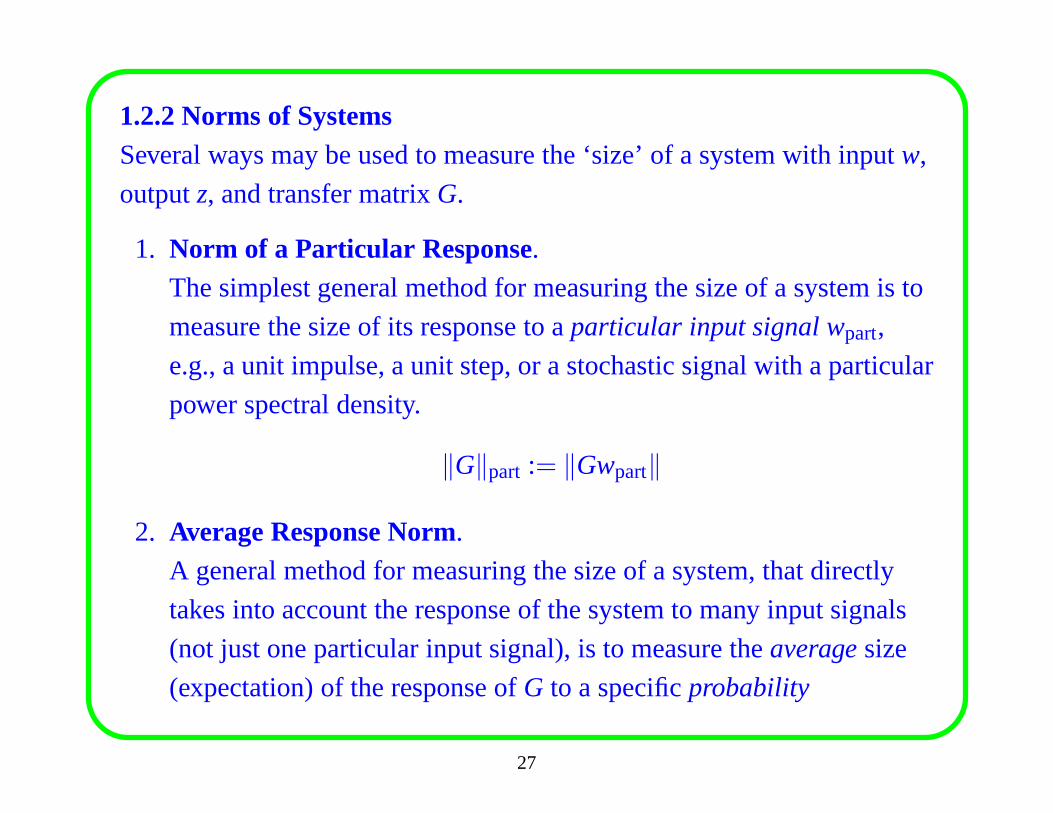
1.2.2 Norms of SystemsSeveral ways may be used to measure the ‘size’ of a system withinputw,
outputz, and transfer matrixG.
1. Norm of a Particular Response.The simplest general method for measuring the size of a system is to
measure the size of its response to aparticular input signal wpart,
e.g., a unit impulse, a unit step, or a stochastic signal witha particular
power spectral density.
‖G‖part := ‖Gwpart‖
2. Average Response Norm.A general method for measuring the size of a system, that directly
takes into account the response of the system to many input signals
(not just one particular input signal), is to measure theaveragesize
(expectation) of the response ofG to a specificprobability
27
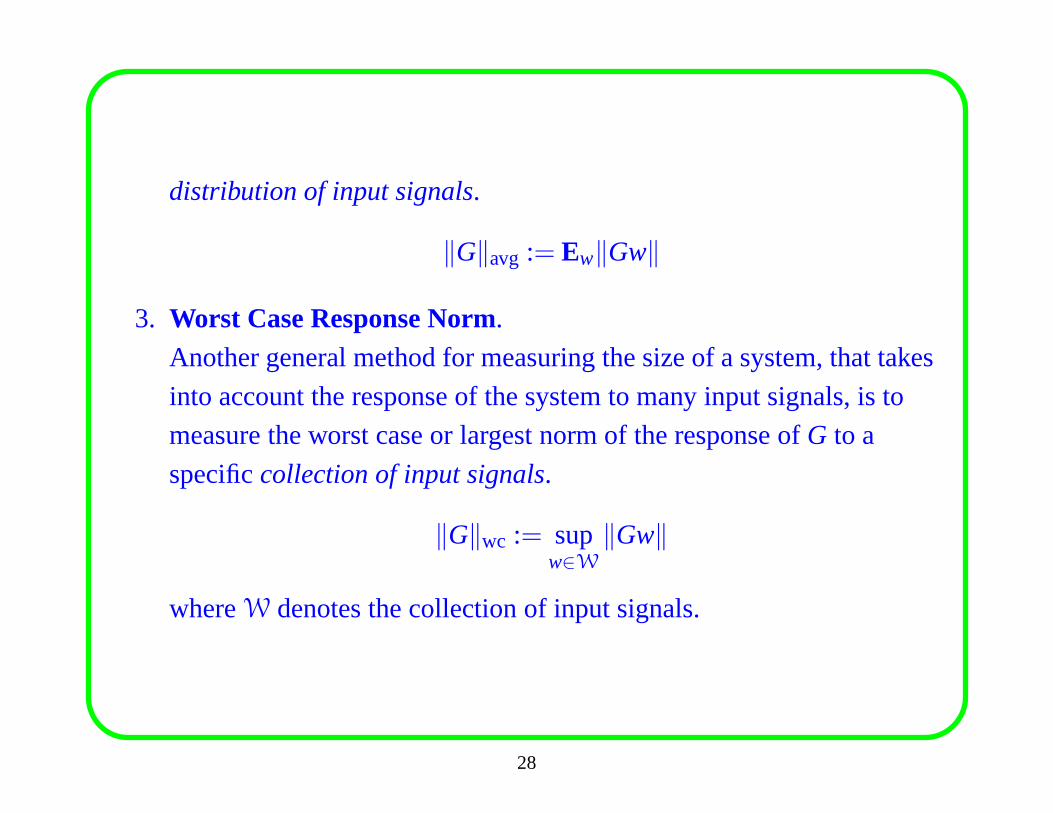
distribution of input signals.
‖G‖avg := Ew‖Gw‖
3. Worst Case Response Norm.Another general method for measuring the size of a system, that takes
into account the response of the system to many input signals, is to
measure the worst case or largest norm of the response ofG to a
specificcollection of input signals.
‖G‖wc := supw∈W
‖Gw‖
whereW denotes the collection of input signals.
28
Gains of Systems
An important special case of a worst case norm is again, or inducednorm if a linear system is regarded as a linear operator (map) between
two normed spaces.
Suppose the size of the input is measured with norm‖ · ‖in and the size of
the output is measured with norm‖ · ‖out, then thegain of the system is
defined by:
‖G‖gn := sup‖w‖in 6=0
‖Gw‖out
‖w‖in= sup
‖w‖in≤1‖Gw‖out
So the gain is therefore the maximum factor by which the system can
scale the size of a signal flowing through it.
29
System Gains and Input-Output Relationships
• L2 (RMS) Gain.
‖G‖∞ := sup‖w‖2 6=0
‖Gw‖2
‖w‖2= sup
‖w‖rms6=0
‖Gw‖rms
‖w‖rms
• L∞ (Peak) Gain.
‖G‖1 := sup‖w‖∞ 6=0
‖Gw‖∞
‖w‖∞
It can be shown that the peak gain is equal to theL1 norm of its
impulse response:
‖G‖1 = max1≤i≤nz
∫ ∞
0
nw
∑j=1
|gi j (t)|dt
30
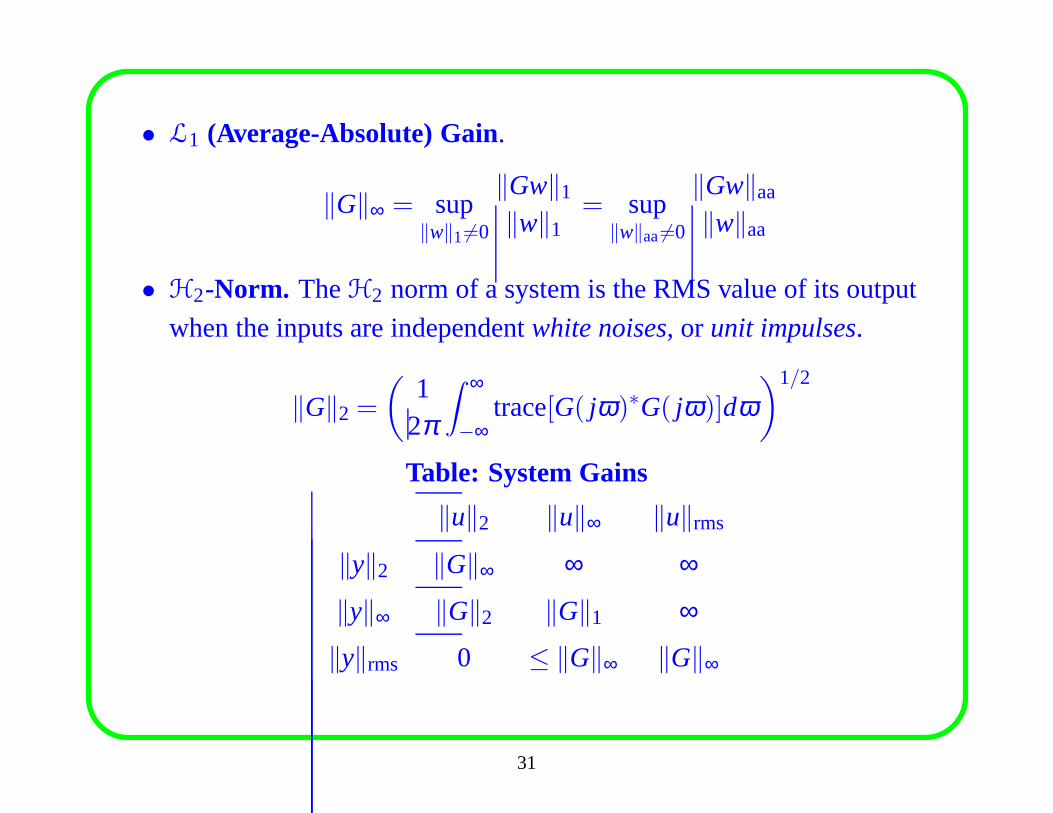
• L1 (Average-Absolute) Gain.
‖G‖∞ = sup‖w‖1 6=0
‖Gw‖1
‖w‖1= sup
‖w‖aa6=0
‖Gw‖aa
‖w‖aa
• H2-Norm. TheH2 norm of a system is the RMS value of its output
when the inputs are independentwhite noises, or unit impulses.
‖G‖2 =
(1
2π
∫ ∞
−∞trace[G( jω)∗G( jω)]dω
)1/2
Table: System Gains
‖u‖2 ‖u‖∞ ‖u‖rms
‖y‖2 ‖G‖∞ ∞ ∞
‖y‖∞ ‖G‖2 ‖G‖1 ∞
‖y‖rms 0 ≤ ‖G‖∞ ‖G‖∞
31
1.3 Frequency Domain Spaces
We have introduced time domain function spaces which are useful inrepresentations signals and systems. As we know sometimes it is moreconvenient to study them in the frequency domain. We now considercomplex function spaces (Hardy spaces).
1. Frequency domain spaces: Signals
• L2( jR) Space. L2( jR) or simplyL2 is a Hilbert space, whichconsists of functions mappingjR toC
n with the inner product
〈 f , g〉 :=1
2π
∫ ∞
−∞trace[ f ∗( jω)g( jω)]dω
and the inner product induced norm is given by
‖ f‖2 :=√
〈 f , f 〉
A function f : jR→ Cn is inL2( jR) if ‖ f‖2 < ∞.
32
• H2 Space. H2 space is a closed subspace ofL2( jR) with
functions f (s) analytic in Re(s)> 0 (open right-half plane).
The corresponding norm is defined as
‖ f‖22 := sup
σ>0
{1
2π
∫ ∞
−∞trace[ f ∗(σ + jω) f (σ + jω)]dω
}
=1
2π
∫ ∞
−∞trace[ f ∗( jω) f ( jω)]dω
So it can be computed just as inL2.
• H⊥2 Space. H⊥
2 is the orthogonal complement ofH2 in L2( jR);
that is the closed subspace of functions inL2 that are analytic in
Re(s)< 0 (open left-half plane).
33
2. Frequency domain spaces: SystemsL2( jR), H2, andH⊥
2 spaces can also be defined for systems. Otherfrequency domain spaces for systems are:
• L∞( jR) Space. L∞( jR) or simplyL∞ is a Banach space ofmatrix-valued functions that are essentially bounded onjR with
‖F‖∞ := ess supω∈R
σ [F( jω)]
• H∞ Space. H∞ is a closed subspace ofL∞( jR) with matrixfunctions that are analytic and bounded in Re(s)> 0 (openright-half plane). TheH∞ norm is defined as
‖F‖∞ := supRe(s)>0
σ [F(s)] = supω∈R
σ [F( jω)]
• H−∞ Space. H−
∞ is a subspace ofL∞ with functions that areanalytic and bounded in the open left-half plane. TheH−
∞ normcan be obtained similarly as theH∞ norm.
34
3. Characterization of real rational function spacesWe are interested in spaces of functions that arereal and rational.We denote real rational function spaces by prefixingR.
• RL2 consists of all real rationalstrictly propertransfer matriceswith no poles on the imaginary axis.
• RH2 consists of all real rationalstrictly propertransfer matriceswith no poles on the open right-half plane (stable).
• RH⊥2 consists of all real rationalstrictly propertransfer matrices
with no poles on the open left-half plane (anti-stable).
• RL∞ consists of all real rationalproper transfer matrices with nopoles on the imaginary axis.
• RH∞ consists of all real rationalproper transfer matrices with nopoles on the open right-half plane (stable).
• RH−∞ consists of all real rationalproper transfer matrices with no
poles on the left right-half plane (anti-stable).
35
Relationship Between Time- and Frequency-Domain Spaces
1. L2( jR) and L2(−∞,∞)
By Parseval’s theorem,L2 in time domain is isomorphic toL2 infrequency domain through a bilateral Laplace (Fourier) transform.
L2(−∞,∞) ∼= L2( jR)
L2[0,∞) ∼= H2
L2(−∞,0] ∼= H⊥2
As a result, ifG∈ L2(−∞,∞) and its bilateral Laplace transform isG(s) ∈ L2( jR), then
‖G‖2 = ‖G‖2
2. L∞( jR) and linear operator space onL2(−∞,∞)
An element in frequency domain spaceL∞( jR) is closely related tothe linear operator on the time domain spaceL2(−∞,∞).
36
(a) EveryG∈ L∞( jR) defines a linear operatorG on L2(−∞,∞),
wherez= Gu is defined by ˆz( jω) = G( jω)u( jω).
(b) For each linear operatorG onL2(−∞,∞), there exists a function
G∈ L∞( jR) such thatz= Gu satisfies ˆz( jω) = G( jω)u( jω) for
all u in L2(−∞,∞).
So for anyG∈ L∞( jR), we can define amultiplication operator :
G : L2 → L2, G f := G f
Theorem Let G∈ L∞( jR) be a transfer matrix, and G is the
corresponding multiplication operator. Then
‖G‖∞ = ‖G‖∞ = supu∈L2 6=0
‖Gu‖2
‖u‖2
So from now on if there is no confusion we will not distinguishasystem with gainG and a transfer matrix G.
37
1.4 ComputingL2L2L2 andH2H2H2 Norms
Several methods can be used to compute theL2-norm or theH2-norm.
1. LetG(s) ∈ L2, then
‖G‖22=
12π
∫ ∞
−∞trace[G∗( jω)G( jω)]dω =
12π j
∮
trace[G∼(s)G(s)]ds
2. Letei denote theith standard basis vector ofRm, wherem is the inputdimension of the system. Apply the impulsive inputδ (t)ei anddenote the output byzi(t) = g(t)ei . AssumeG(s) is strictly proper,thenzi ∈ L2 and
‖G‖22 =
m
∑i=1
‖zi‖22
3. Denote the impulse response matrix ofG(s) by g(t). Then
‖G‖22 = ‖g‖2
2 =∫ ∞
−∞trace[g∗(t)g(t)]dt
38
4. State space computation ofH2 norm.
Consider a transfer matrix
G(s) =
A B
C 0
with A stable. Then
‖G‖22 = trace(BTQB) = trace(CPCT)
whereQ andP are theobservability Gramian and the
controllability Gramian that can be obtained from the following
Lyapunov equations:
AP+PAT +BBT = 0
ATQ+QA+CTC = 0
Related MATLAB Commands:gram, h2norm.
39
1.5 ComputingL∞L∞L∞ andH∞H∞H∞ Norms
Let G(s) ∈ L∞, then‖G‖∞ = sup
ωσ [G( jω)]
A control engineering interpretation of the infinity norm ofa scalartransfer functionG is
• The distance in the complex plane from the origin to the farthestpoint on the Nyquist plot ofG.
• The peak value on the Bode magnitude plot of|G( jω)|.Hence theL∞ norm of a transfer function can be obtained graphically.
To get an estimate, set up a fine grid of frequency points:
{ω1, · · · ,ωN}
Then an estimate for‖G‖∞ is max1≤k≤N σ [G( jω)].
40
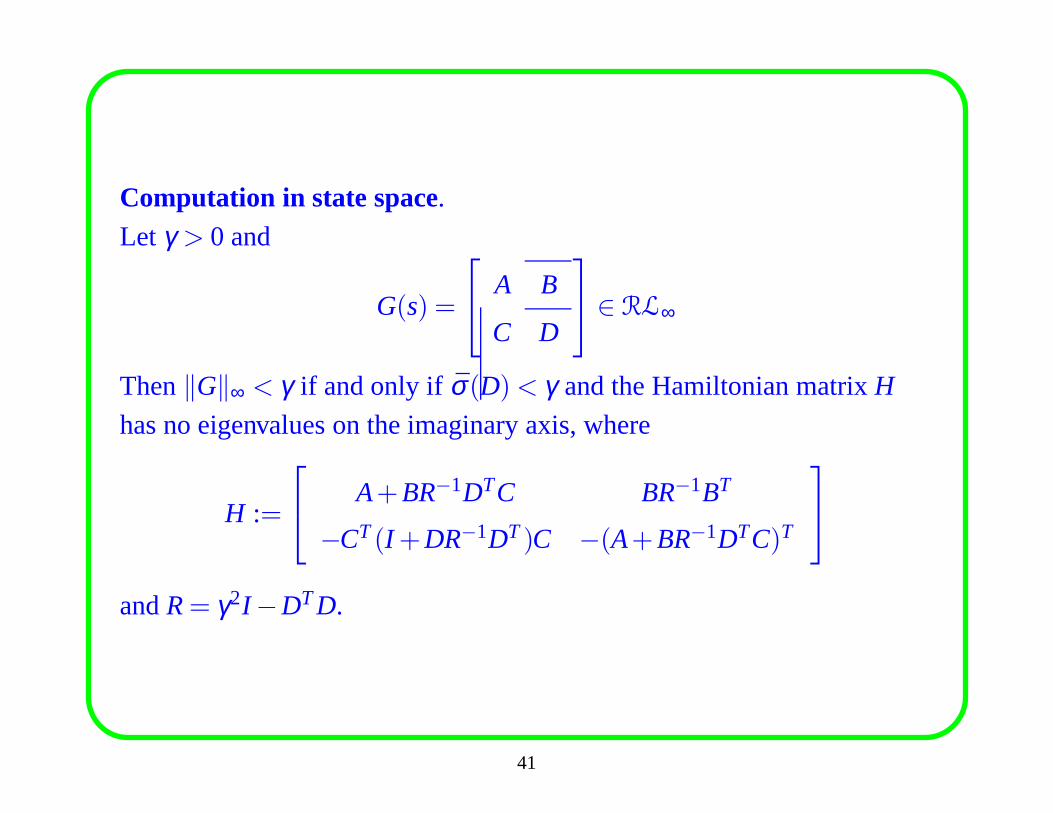
Computation in state space.Let γ > 0 and
G(s) =
A B
C D
∈ RL∞
Then‖G‖∞ < γ if and only if σ(D)< γ and the Hamiltonian matrixH
has no eigenvalues on the imaginary axis, where
H :=
A+BR−1DTC BR−1BT
−CT(I +DR−1DT)C −(A+BR−1DTC)T
andR= γ2I −DTD.
41
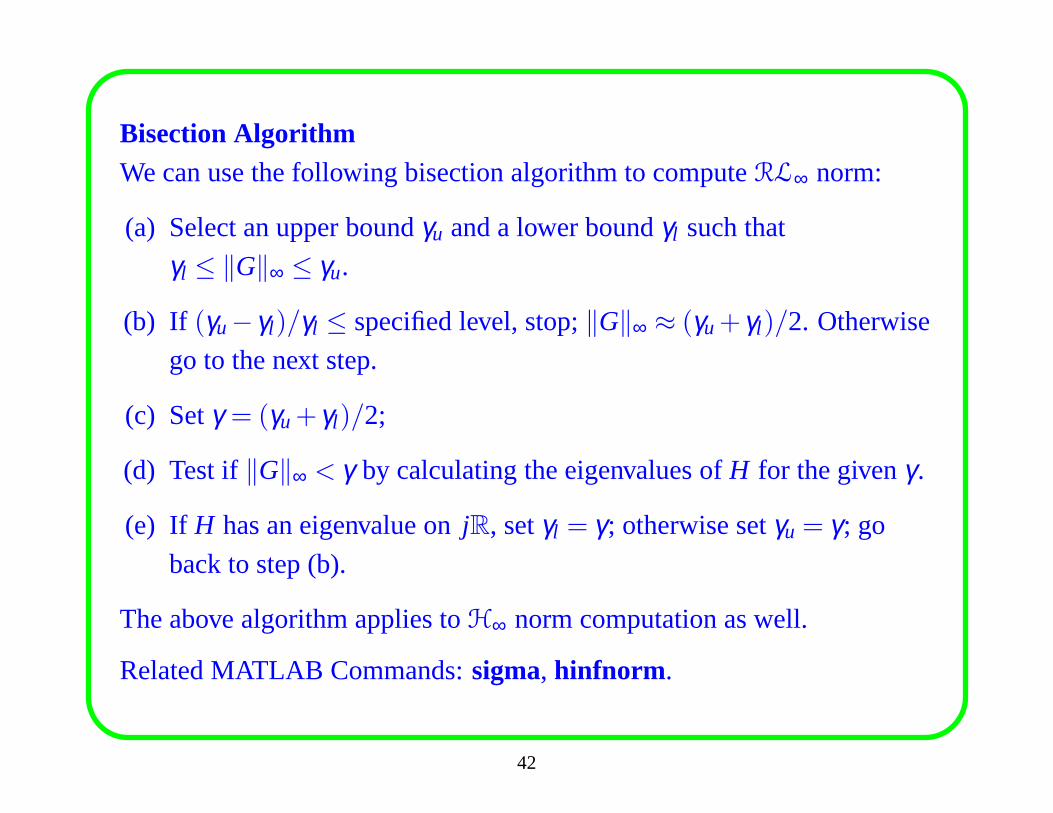
Bisection AlgorithmWe can use the following bisection algorithm to computeRL∞ norm:
(a) Select an upper boundγu and a lower boundγl such that
γl ≤ ‖G‖∞ ≤ γu.
(b) If (γu− γl )/γl ≤ specified level, stop;‖G‖∞ ≈ (γu+ γl )/2. Otherwise
go to the next step.
(c) Setγ = (γu+ γl )/2;
(d) Test if‖G‖∞ < γ by calculating the eigenvalues ofH for the givenγ.
(e) If H has an eigenvalue onjR, setγl = γ; otherwise setγu = γ; go
back to step (b).
The above algorithm applies toH∞ norm computation as well.
Related MATLAB Commands:sigma, hinfnorm .
42
Chapter 2. Uncertainty and Robustness
In this chapter we will describe various types of uncertainties that can
arise in physical systems, and obtain robust stability tests for systems
under various model uncertainty assumptions. Outline of this chapter:
• Model uncertainty description
• Small gain theorem and smallµ theorem
• Robust stability under unstructured and structured uncertainties
• Linear fractional transformation (LFT) and Main Loop Theorem
43
Model Uncertainty
Modeling of plant uncertainty can be done in two methods:
• Unstructured uncertainty. Unstructured uncertainty is the uncertainty
about which no information is available about its effects ona process,
except that an upper bound on its ‘size’ or magnitude as a function of
frequency can be estimated.
• Structured uncertainty. Structured uncertainty is the uncertainty
about which ‘structural’ information is available, which will typically
restrict to a section of a process model. It is also calledparameter
uncertainty.
44
2.1 Unstructured Uncertainty
Several methods can be used to model unstructured uncertainty.
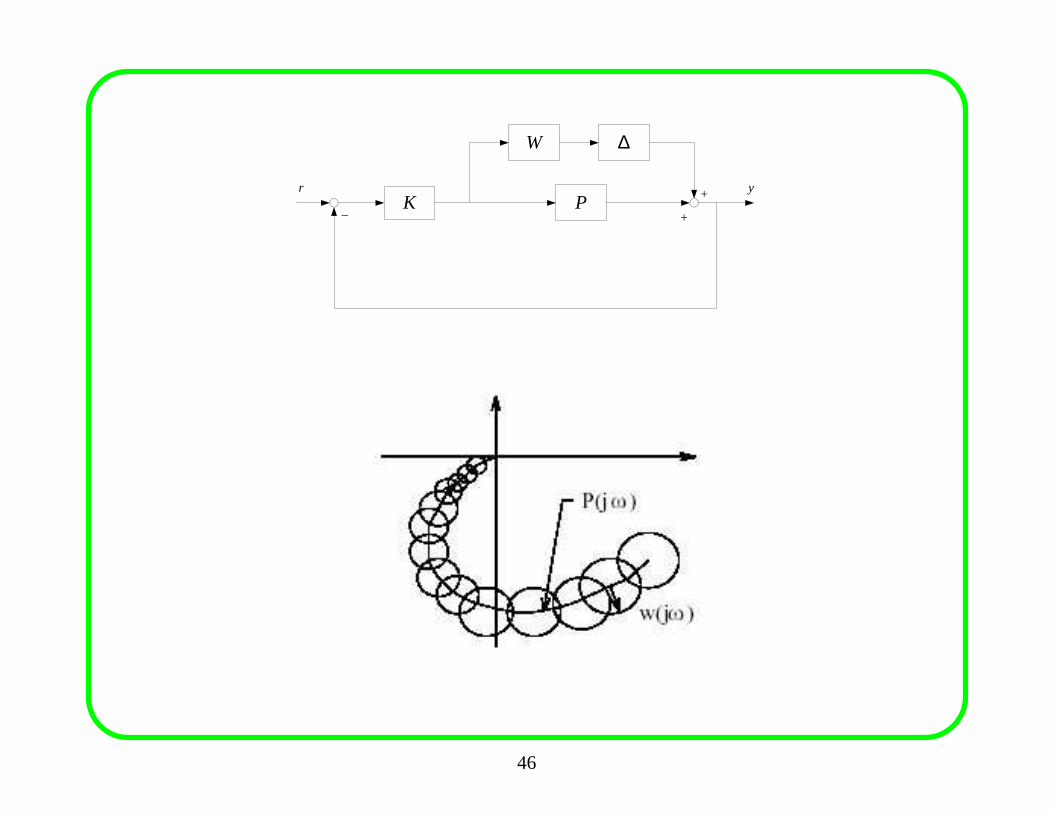
1. Additive UncertaintySuppose that the nominal plant transfer matrix isP and consider
perturbed plant transfer matrices of the form
P∆ = P+∆W
HereW is a fixed stable transfer matrix, the weight, and∆ is a
variable stable transfer matrix satisfying
‖∆‖∞ ≤ 1
Furthermore, it is assumed that no unstable poles ofP are canceled in
forming P∆. Such a perturbation∆ is said to be allowable.
45
K P
W
r
_
y
∆
+
+
46
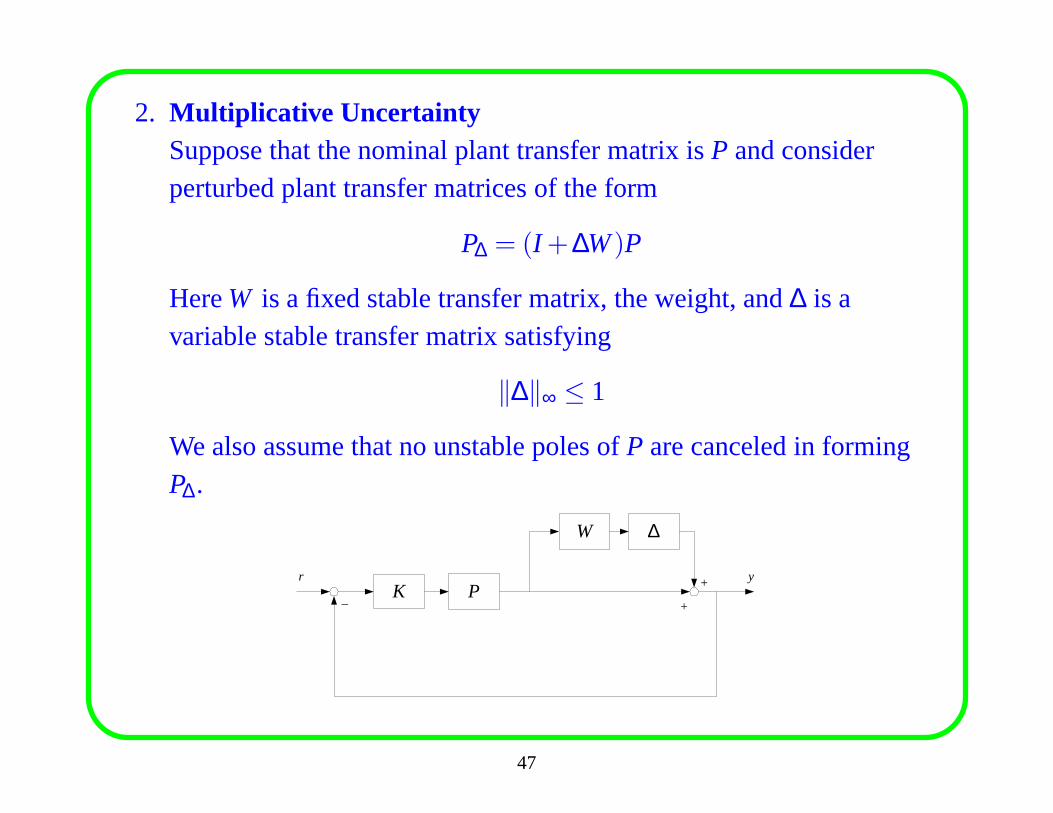
2. Multiplicative UncertaintySuppose that the nominal plant transfer matrix isP and considerperturbed plant transfer matrices of the form
P∆ = (I +∆W)P
HereW is a fixed stable transfer matrix, the weight, and∆ is avariable stable transfer matrix satisfying
‖∆‖∞ ≤ 1
We also assume that no unstable poles ofP are canceled in formingP∆.
K P
W
r
_
y
∆
+
+
47
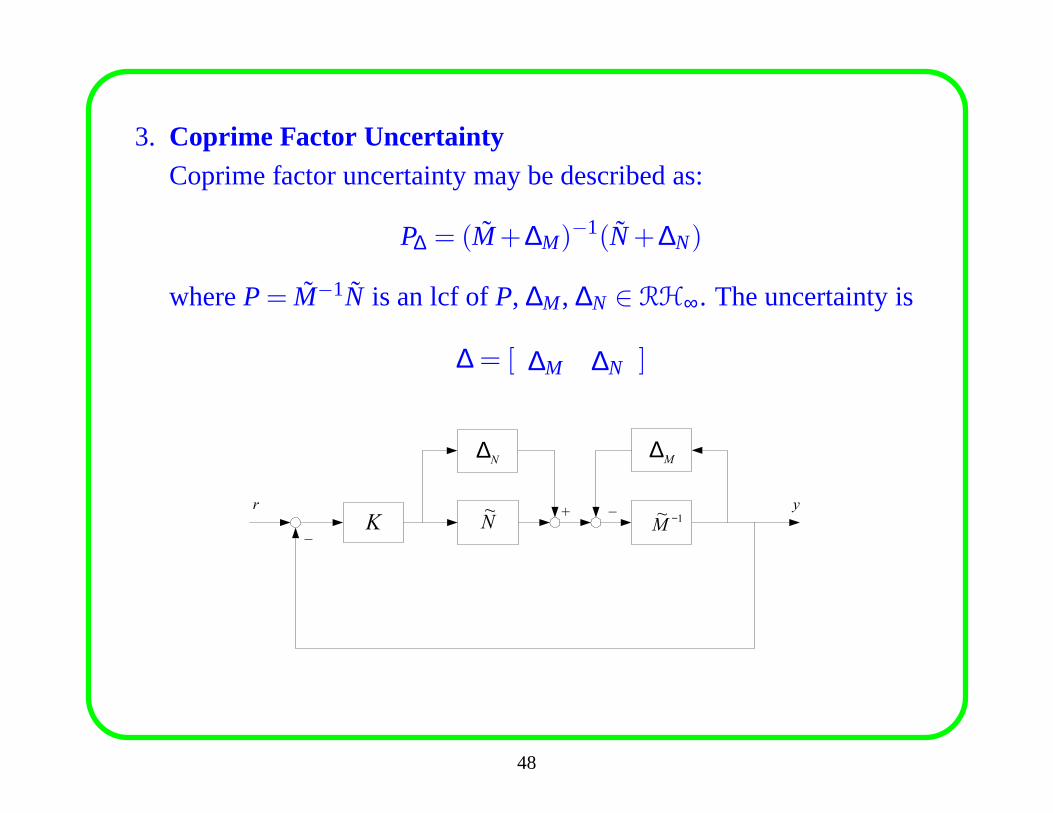
3. Coprime Factor UncertaintyCoprime factor uncertainty may be described as:
P∆ = (M+∆M)−1(N+∆N)
whereP= M−1N is an lcf ofP, ∆M, ∆N ∈ RH∞. The uncertainty is
∆ = [ ∆M ∆N ]
Kr
_
y
∆M
+_
∆N
N~
1~ −M
48
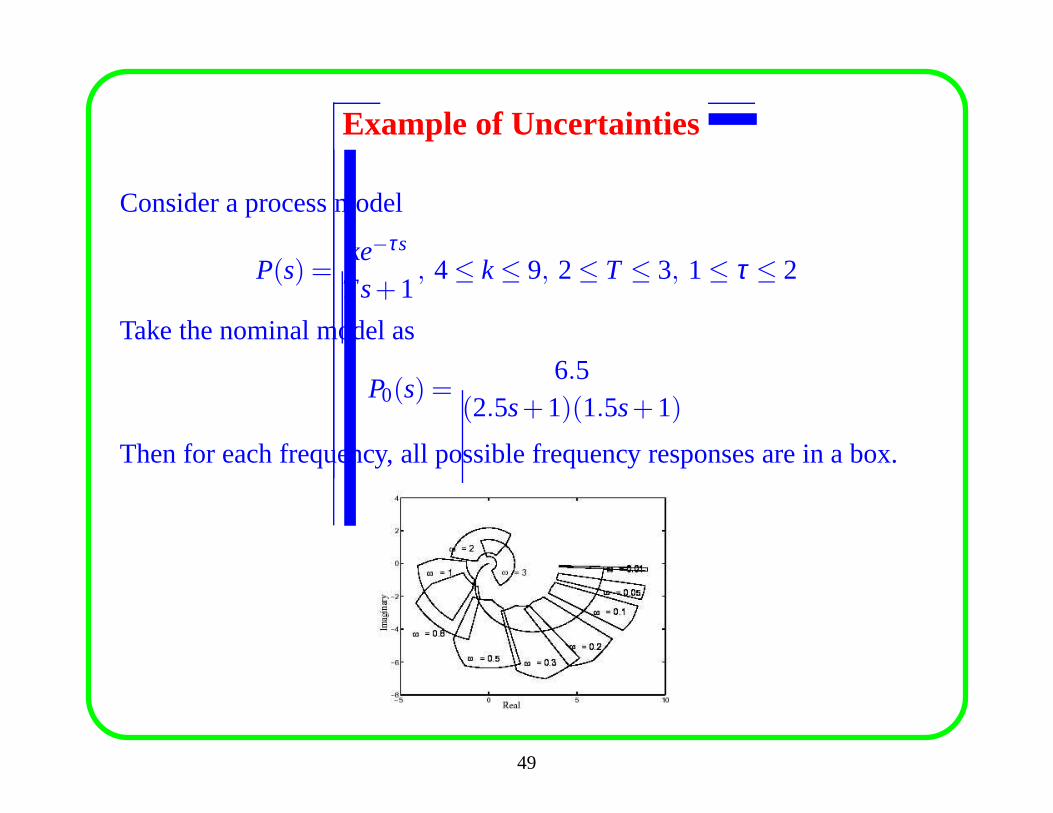
Example of Uncertainties
Consider a process model
P(s) =ke−τs
Ts+1, 4≤ k≤ 9, 2≤ T ≤ 3, 1≤ τ ≤ 2
Take the nominal model as
P0(s) =6.5
(2.5s+1)(1.5s+1)
Then for each frequency, all possible frequency responses are in a box.
49
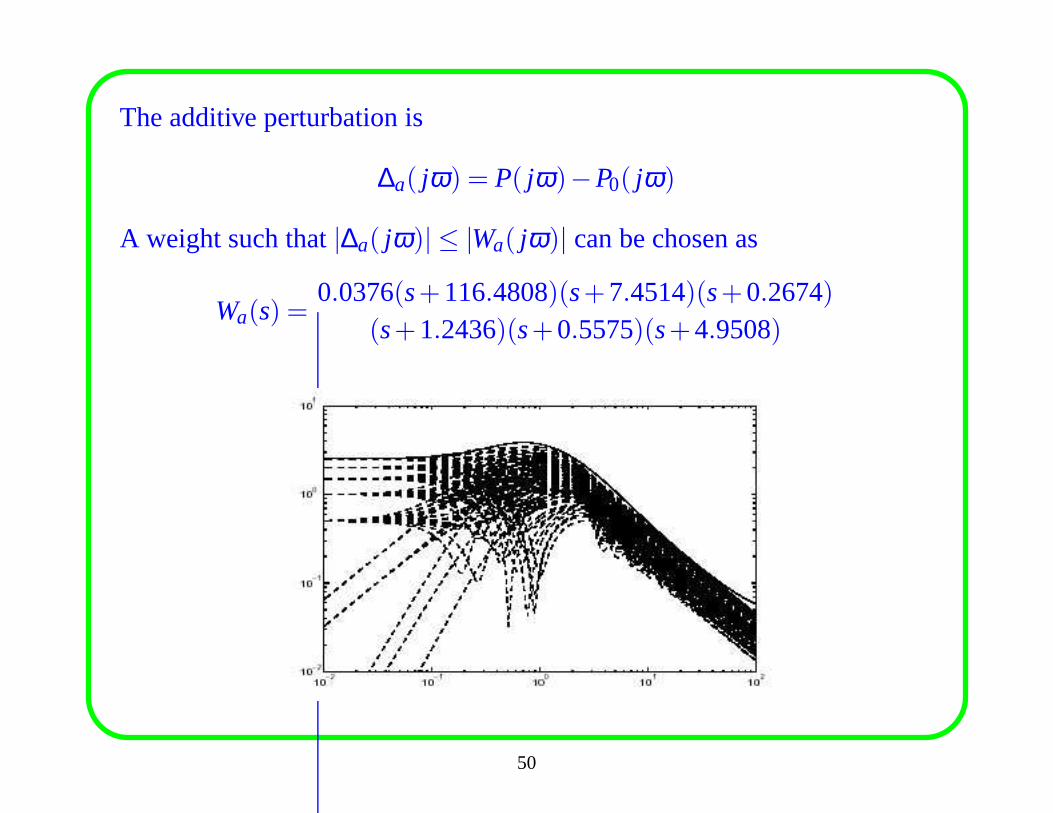
The additive perturbation is
∆a( jω) = P( jω)−P0( jω)
A weight such that|∆a( jω)| ≤ |Wa( jω)| can be chosen as
Wa(s) =0.0376(s+116.4808)(s+7.4514)(s+0.2674)
(s+1.2436)(s+0.5575)(s+4.9508)
50
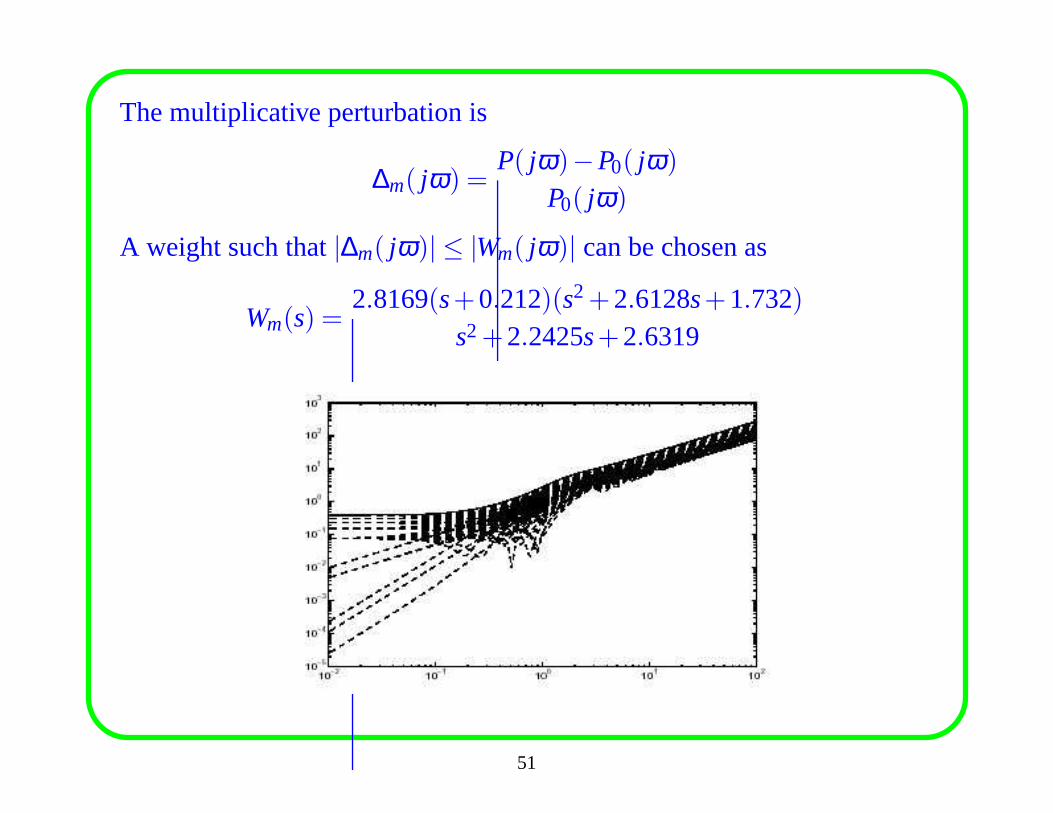
The multiplicative perturbation is
∆m( jω) =P( jω)−P0( jω)
P0( jω)
A weight such that|∆m( jω)| ≤ |Wm( jω)| can be chosen as
Wm(s) =2.8169(s+0.212)(s2+2.6128s+1.732)
s2+2.2425s+2.6319
51
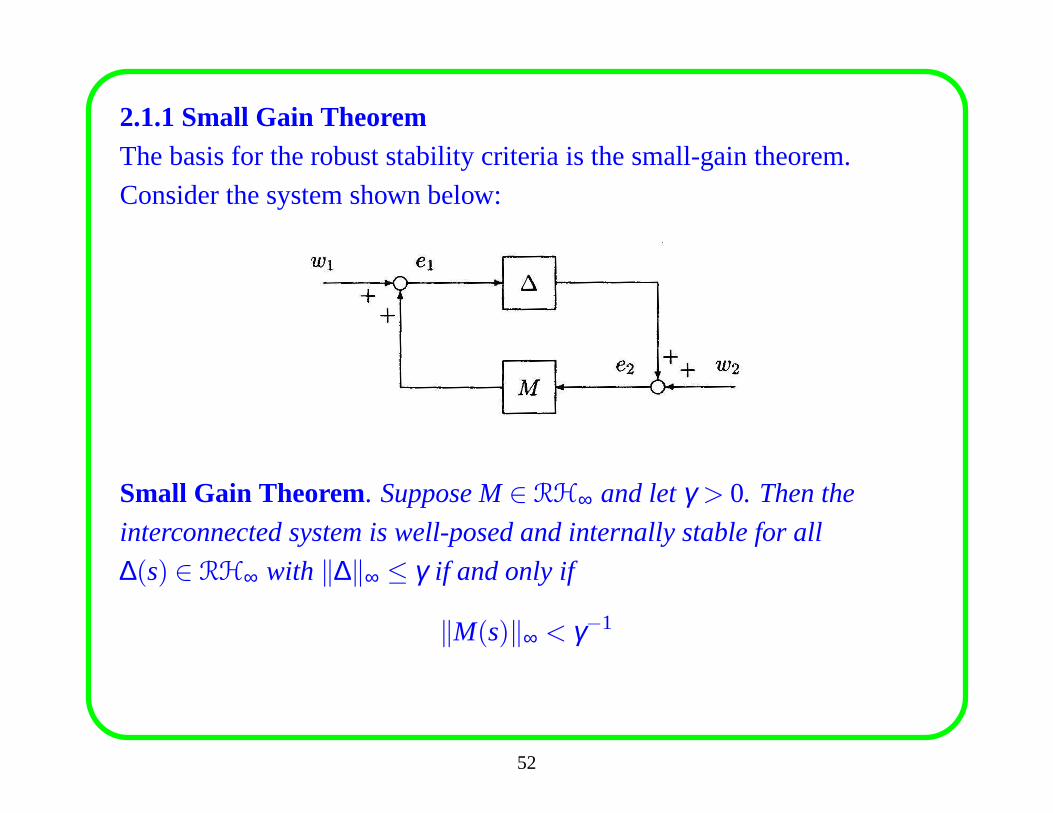
2.1.1 Small Gain TheoremThe basis for the robust stability criteria is the small-gain theorem.
Consider the system shown below:
Small Gain Theorem. Suppose M∈ RH∞ and letγ > 0. Then the
interconnected system is well-posed and internally stablefor all
∆(s) ∈ RH∞ with ‖∆‖∞ ≤ γ if and only if
‖M(s)‖∞ < γ−1
52
2.1.2 Robust Stability under Unstructured UncertaintiesFor the uncertainties discussed above, we have the following results:
1. Multiplicative UncertaintyLet P∆ = {(I +∆W)P : ∆ ∈ RH∞} and letK be a stabilizing
controller for the nominal plantP. Then the closed-loop system is
well-posed and internally stable for all‖∆‖∞ ≤ 1 if and only if
‖WPK(I +PK)−1‖∞ < 1
The condition‖WT‖∞ < 1 also has a nice graphical interpretation.
‖WT‖∞ < 1⇔∣∣∣∣
W( jω)L( jω)
1+L( jω)
∣∣∣∣< 1, ∀ω
⇔ |W( jω)L( jω)|< |1+L( jω)|, ∀ω.
The last inequality says that at every frequency, the critical point,−1,
lies outside the disk of centerL( jω), radius|W( jω)L( jω)|.
53
2. Additive UncertaintyLet P∆ = {P+∆W : ∆ ∈ RH∞} and letK be a stabilizing controller
for the nominal plantP. Then the closed-loop system is well-posed
and internally stable for all‖∆‖∞ ≤ 1 if and only if
‖WK(I +PK)−1‖∞ < 1
3. Coprime Factor UncertaintyLet P∆ = {(M+∆M)−1(N+∆N) : M, N,∆M,∆N ∈RH∞} with (M, N)
being an lcf of the nominal plantP. Let K be a stabilizing controller
for P. Then the closed-loop system is well-posed and internally
stable for all‖[ ∆M ∆N ]‖∞ ≤ 1 if and only if
∥∥∥∥∥∥
I
K
(I +PK)−1M−1
∥∥∥∥∥∥
∞
< 1
54
2.2 Structured Uncertainty
It is easy to see that the maximum singular value (H∞-norm) is useful in
analyzing the unstructured uncertainty. To analyze the structured
uncertainty, we need the concept of structured singular value.
The definition of the structured singular value, which is also calledµ,
depends on the underlying block structure of the uncertainty set∆∆∆.
Defining the structure involves specifying three things:
• The type of each block.repeated scalaror full block.
• The total number of blocks. The number ofrepeated scalarblocks is
denoted byS, and the number offull blocks is denoted byF .
• The dimension of each block. To bookkeep the dimensions, we
introduce positive integersc1, · · · ,cS andm1, · · · ,mF . Thei’th
repeated scalar block isci ×ci , and thek’th full block is mk×mk.
55
We define the block structure∆∆∆ ⊂ Cn×n as
∆∆∆ = {diag[δ1Ic1, · · · ,δSIcS,∆1, · · · ,∆F ] : δi ∈ C,∆k ∈ Cmk×mk}
For consistency among all dimensions, we must have
S
∑i=1
ci +F
∑k=1
mk = n
Structured Singular Value (SSV)
Given a matrixM ∈ Cn×n and the underlying structure∆∆∆, µ∆∆∆(M) is
defined as
µ∆∆∆(M) :=1
min{σ(∆) : ∆ ∈∆∆∆,det(I −M∆) = 0}
unless no∆ ∈∆∆∆ makesI −M∆ singular, in which caseµ∆∆∆(M) := 0.
56
For a transfer matrixM(s), define the set of all block diagonal and stablerational transfer functions that have block structures as∆∆∆:
M(∆∆∆) := {∆(·) ∈ RH∞ : ∆(s) ∈∆∆∆ for all s∈ C such that Res≥ 0}
then the structured singular value ofM(s) can be computed pointwise as
‖M(s)‖µ = µ∆∆∆(M(s)) = supω∈R∪{∞}
µ∆∆∆(M( jω))
The functionµ : Cn×n → R is not a norm, since it does not satisfy thetriangle inequality. However, for simplicity, we still use‖ · ‖µ .Properties ofµµµ :
• If ∆∆∆ = {δ I : δ ∈ C} (complex repeated scalar block,S= 1,F = 0),thenµ∆∆∆(M) = ρ(M).
• If ∆∆∆ = Cn×n (full block, S= 0,F = 1), thenµ∆∆∆(M) = σ(M).
• ρ(M)≤ µ∆∆∆(M)≤ σ(M), µ∆∆∆(M) = max∆∈∆∆∆,σ(∆)≤1 ρ(M∆).
Related MATLAB Command:mu(M,blk)
57
2.2.1 Upper and Lower Bounds ofµµµThe structured singular value lies between the spectral radius and the
maximum singular value ofM. However, the two bounds can be
arbitrarily far. To get a tight upper and lower bounds, we consider
transformations onM that do not affectµ∆∆∆(M), but do affectρ andσ .
To do this, define the following two subsets ofCn×n:
U := {U ∈∆∆∆ : UU∗ = In}D := {D ∈ Cn×n : detD 6= 0,D∆ = ∆D,∀∆ ∈∆∆∆}
= {D1, . . . ,DS,d1Im1, . . . ,dF ImF : Di ∈ Cci×ci ,d j ∈ C}
Note that for any∆ ∈∆∆∆, U ∈ U, andD ∈D, we have
U∗ ∈ U,U∆ ∈∆∆∆,∆U ∈∆∆∆,σ(U∆) = σ(∆U) = σ(∆)
D∆ = ∆D
58
Consequently, for allU ∈ U andD ∈D,
µ∆∆∆(MU) = µ∆∆∆(UM) = µ∆∆∆(M) = µ∆∆∆(DMD−1)
Therefore, the bounds can be tightened to
maxU∈U
ρ(UM)≤ µ∆∆∆(M)≤ infD∈D
σ(DMD−1)
• The lower bound is always an equality, i.e.,
maxU∈U
ρ(UM) = µ∆∆∆(M)
Unfortunately, the quantityρ(UM) can have multiple local maximathat are not global, so we can only obtain a lower bound.
• The upper bound can be formulated as a convex optimizationproblem, so the global minimum can be found. Unfortunately,theupper bound is not always equal toµ. We have
µ∆∆∆(M) = infD∈D
σ(DMD−1) if 2S+F ≤ 3
59
2.2.2 Smallµµµ Theorem and Robust StabilityThe basis for robust stability under structured uncertainties is the smallµtheorem. The system configuration is similar to that in smallgain
theorem, but∆ is allowed to be structured (block diagonal).
Small µ Theorem. Let γ > 0. Then the interconnected system is
well-posed and internally stable for all∆(·) ∈M(∆∆∆) with ‖∆‖∞ ≤ γ if and
only if
‖M(s)‖µ = supω∈R∪{∞}
µ∆∆∆(M( jω))< γ−1
Hence the peak value on theµ plot of the frequency response determines
the size of perturbations that the loop is robustly stable against.
60
2.3 LFT and LFT Uncertainty
Let M be a complex matrix partitioned as
M =
M11 M12
M21 M22
∈ C(p1+p2)×(q1+q2)
and let∆l ∈ Cq2×p2 and∆u ∈ Cq1×p1 be other two complex matrices.Then we can define alower LFT with respect to∆l as the map
Fl (M,•) : Cq2×p2 → Cq1×p1
withFl (M,∆l ) := M11+M12∆1(I −M22∆l )
−1M21
provided that the inverse(I −M22∆l )−1 exists. We can also define an
upper LFT with respect to∆u as
Fu(M,•) : Cq1×p1 → Cq2×p2
61
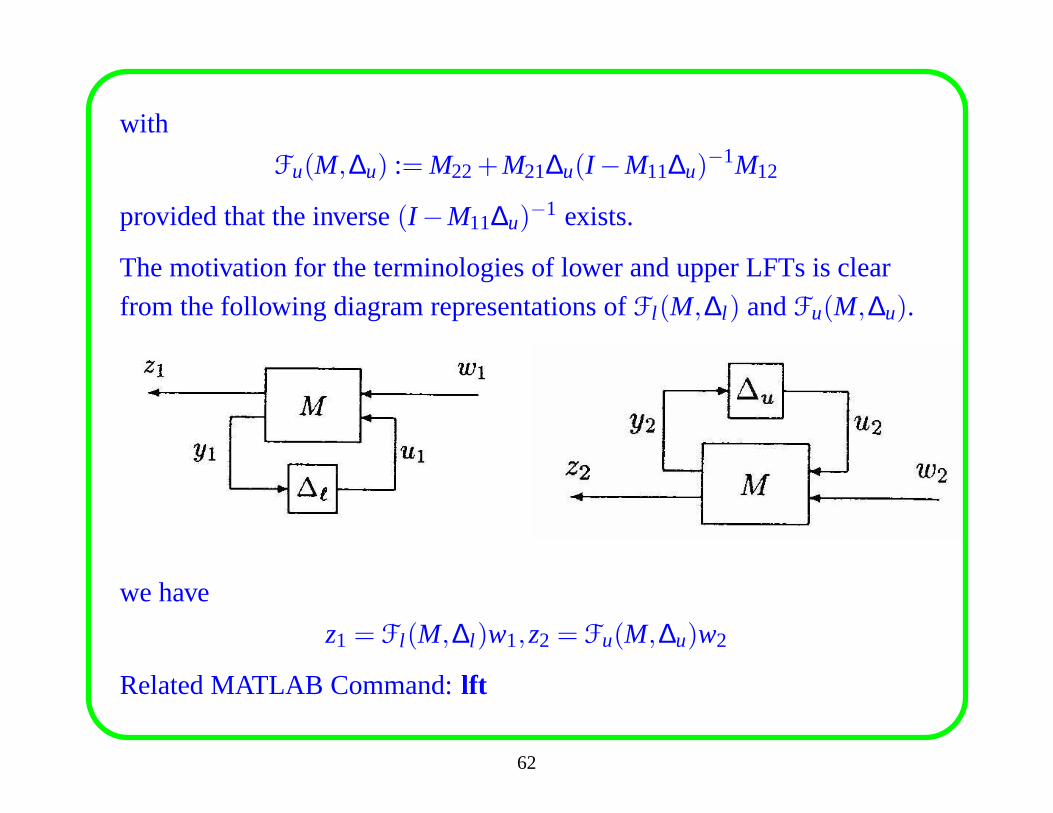
with
Fu(M,∆u) := M22+M21∆u(I −M11∆u)−1M12
provided that the inverse(I −M11∆u)−1 exists.
The motivation for the terminologies of lower and upper LFTsis clear
from the following diagram representations ofFl (M,∆l ) andFu(M,∆u).
we have
z1 = Fl (M,∆l )w1,z2 = Fu(M,∆u)w2
Related MATLAB Command:lft
62
Redheffer Star Products
An important property of LFTs is that any interconnection ofLFTs isagain an LFT. This property is by far the most often used and isthe heartof LFT machinery.
SupposeP andK are compatible partitioned matrices
P=
P11 P12
P21 P22
,K =
K11 K12
K21 K22
such that the matrix productP22K11 is well defined and square, andassume further thatI −P22K11 is invertible. Then thestar product of P
andK with respect to this partition is defined as
P⋆K :=
Fl (P,K11) P12(I −K11P22)
−1K12
K21(I −P22K11)−1P21 Fu(K,P22)
63
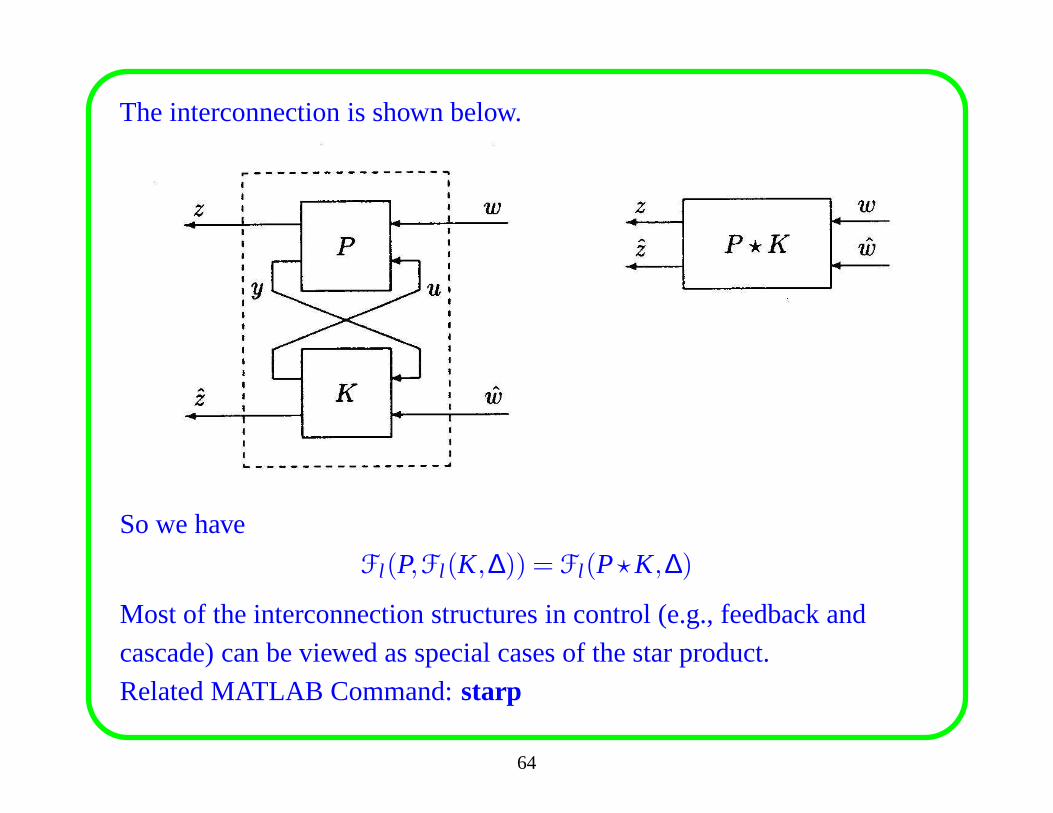
The interconnection is shown below.
So we have
Fl (P,Fl (K,∆)) = Fl (P⋆K,∆)
Most of the interconnection structures in control (e.g., feedback and
cascade) can be viewed as special cases of the star product.
Related MATLAB Command:starp
64
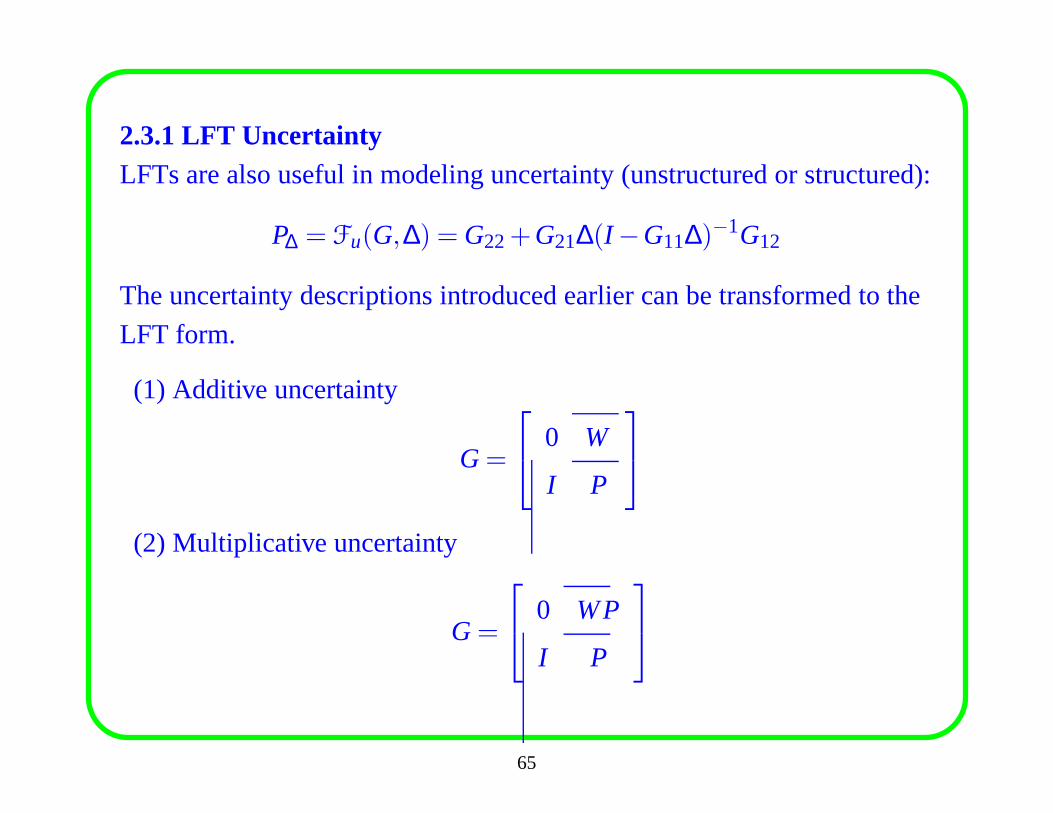
2.3.1 LFT UncertaintyLFTs are also useful in modeling uncertainty (unstructuredor structured):
P∆ = Fu(G,∆) = G22+G21∆(I −G11∆)−1G12
The uncertainty descriptions introduced earlier can be transformed to the
LFT form.
(1) Additive uncertainty
G=
0 W
I P
(2) Multiplicative uncertainty
G=
0 WP
I P
65
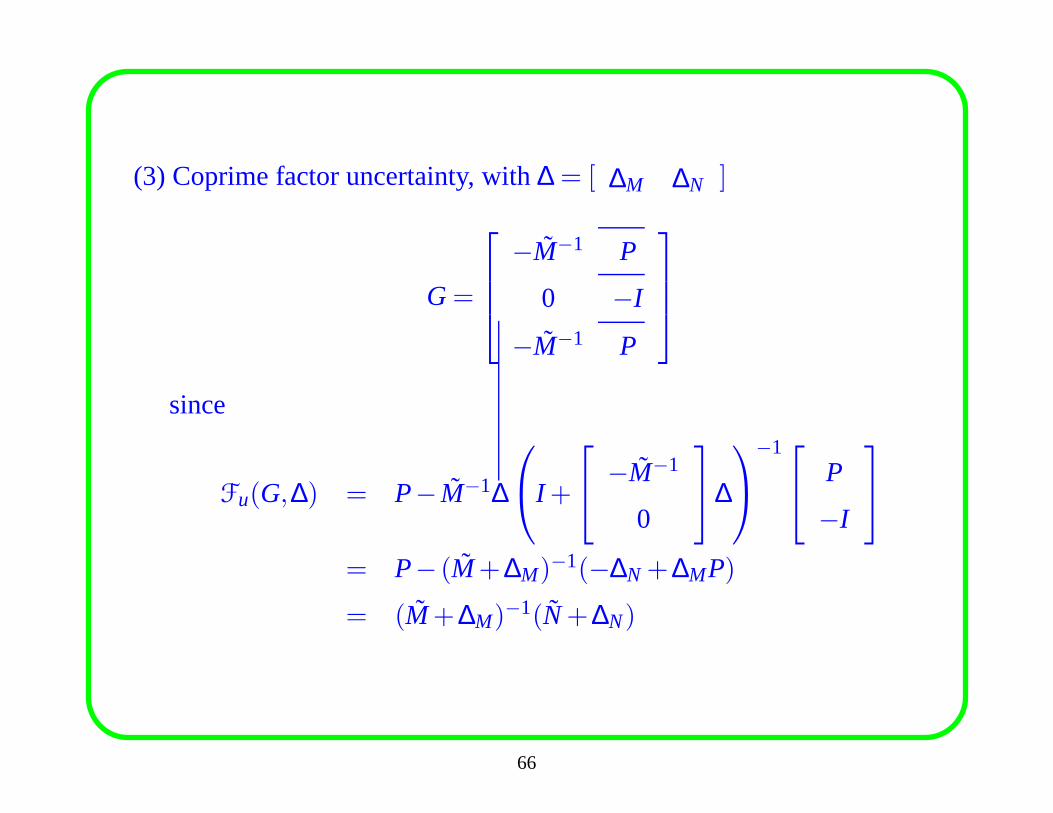
(3) Coprime factor uncertainty, with∆ = [ ∆M ∆N ]
G=
−M−1 P
0 −I
−M−1 P
since
Fu(G,∆) = P− M−1∆
I +
−M−1
0
∆
−1
P
−I
= P− (M+∆M)−1(−∆N +∆MP)
= (M+∆M)−1(N+∆N)
66
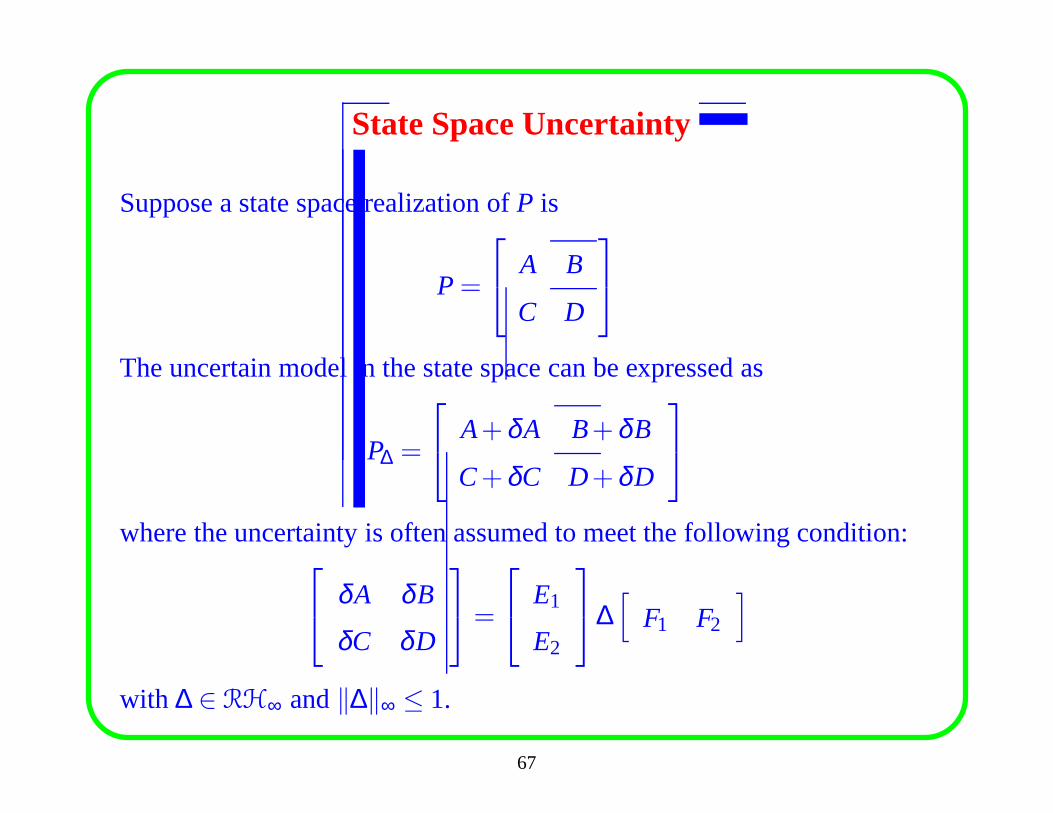
State Space Uncertainty
Suppose a state space realization ofP is
P=
A B
C D
The uncertain model in the state space can be expressed as
P∆ =
A+δA B+δB
C+δC D+δD
where the uncertainty is often assumed to meet the followingcondition:
δA δB
δC δD
=
E1
E2
∆[
F1 F2
]
with ∆ ∈ RH∞ and‖∆‖∞ ≤ 1.
67
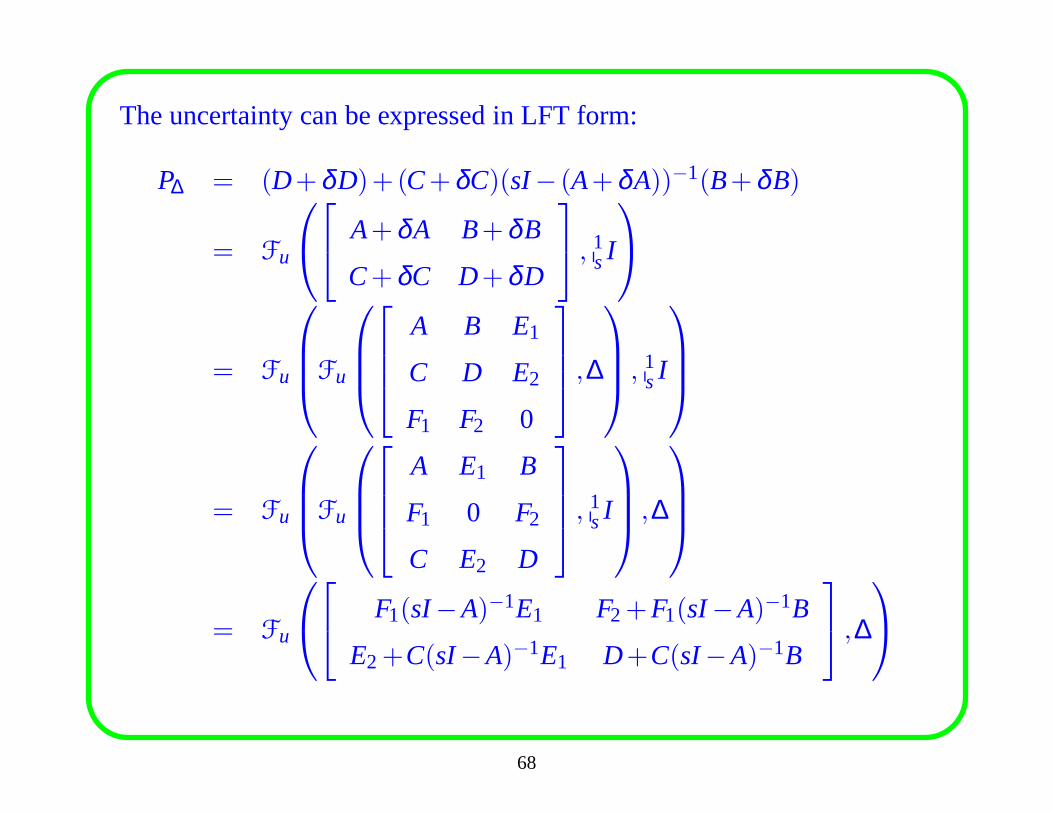
The uncertainty can be expressed in LFT form:
P∆ = (D+δD)+(C+δC)(sI− (A+δA))−1(B+δB)
= Fu
A+δA B+δB
C+δC D+δD
, 1sI
= Fu
Fu
A B E1
C D E2
F1 F2 0
,∆
, 1
sI
= Fu
Fu
A E1 B
F1 0 F2
C E2 D
, 1
sI
,∆
= Fu
F1(sI−A)−1E1 F2+F1(sI−A)−1B
E2+C(sI−A)−1E1 D+C(sI−A)−1B
,∆
68
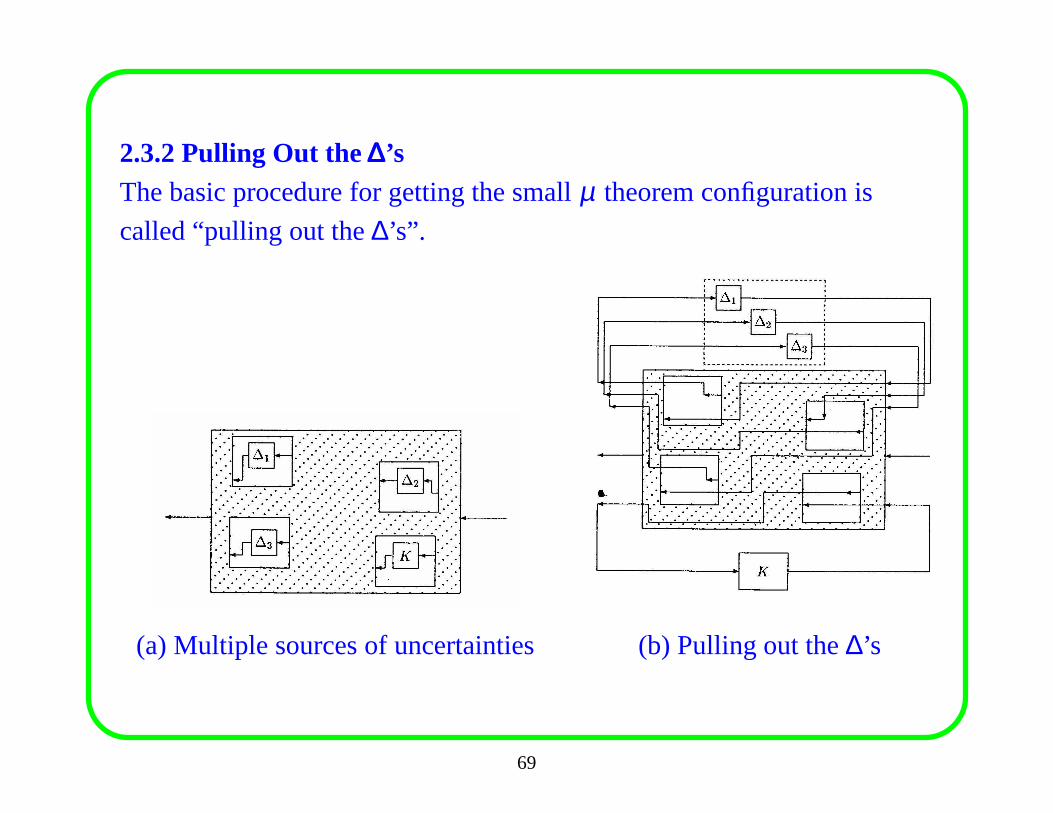
2.3.2 Pulling Out the∆∆∆’sThe basic procedure for getting the smallµ theorem configuration is
called “pulling out the∆’s”.
(a) Multiple sources of uncertainties (b) Pulling out the∆’s
69
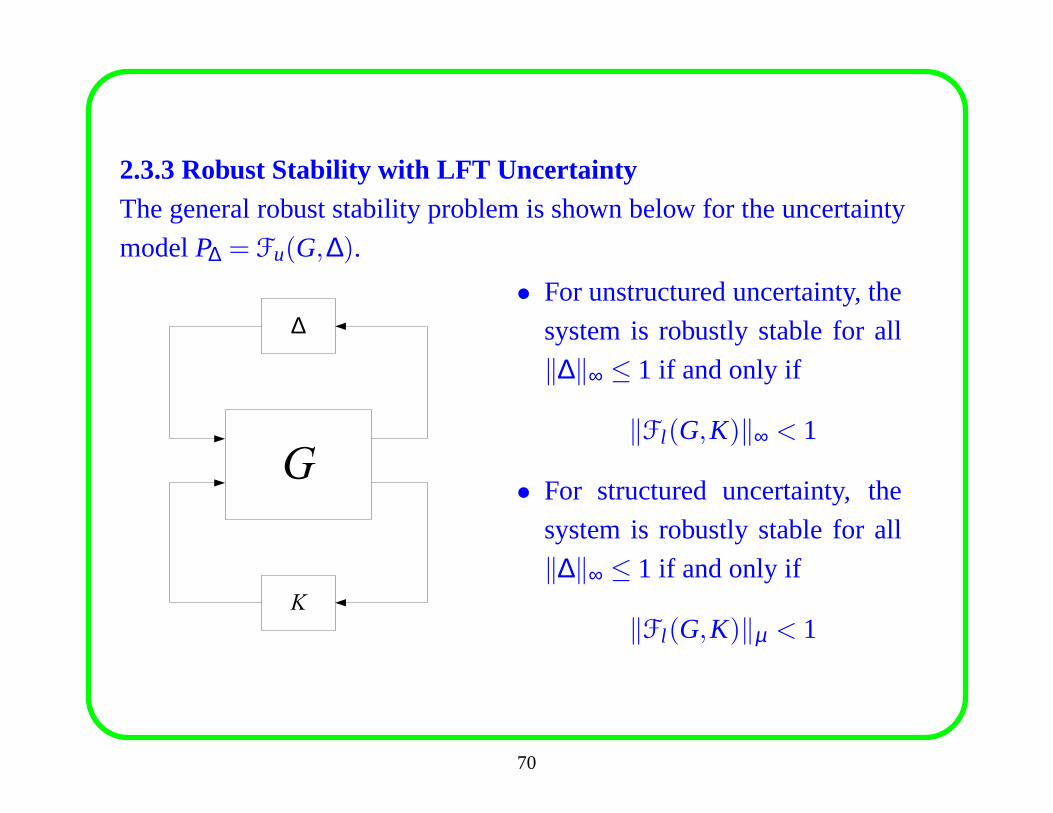
2.3.3 Robust Stability with LFT UncertaintyThe general robust stability problem is shown below for the uncertainty
modelP∆ = Fu(G,∆).
G
∆
K
• For unstructured uncertainty, the
system is robustly stable for all
‖∆‖∞ ≤ 1 if and only if
‖Fl (G,K)‖∞ < 1
• For structured uncertainty, the
system is robustly stable for all
‖∆‖∞ ≤ 1 if and only if
‖Fl (G,K)‖µ < 1
70
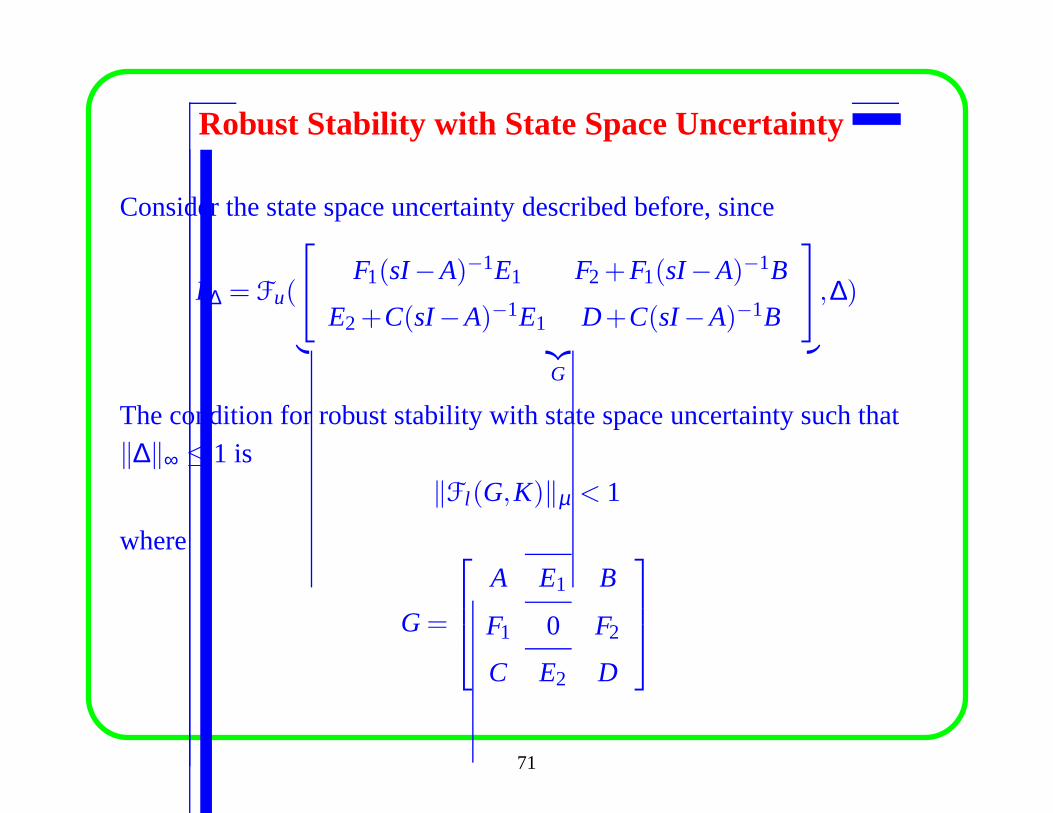
Robust Stability with State Space Uncertainty
Consider the state space uncertainty described before, since
P∆ = Fu(
F1(sI−A)−1E1 F2+F1(sI−A)−1B
E2+C(sI−A)−1E1 D+C(sI−A)−1B
︸ ︷︷ ︸
G
,∆)
The condition for robust stability with state space uncertainty such that‖∆‖∞ ≤ 1 is
‖Fl (G,K)‖µ < 1
where
G=
A E1 B
F1 0 F2
C E2 D
71
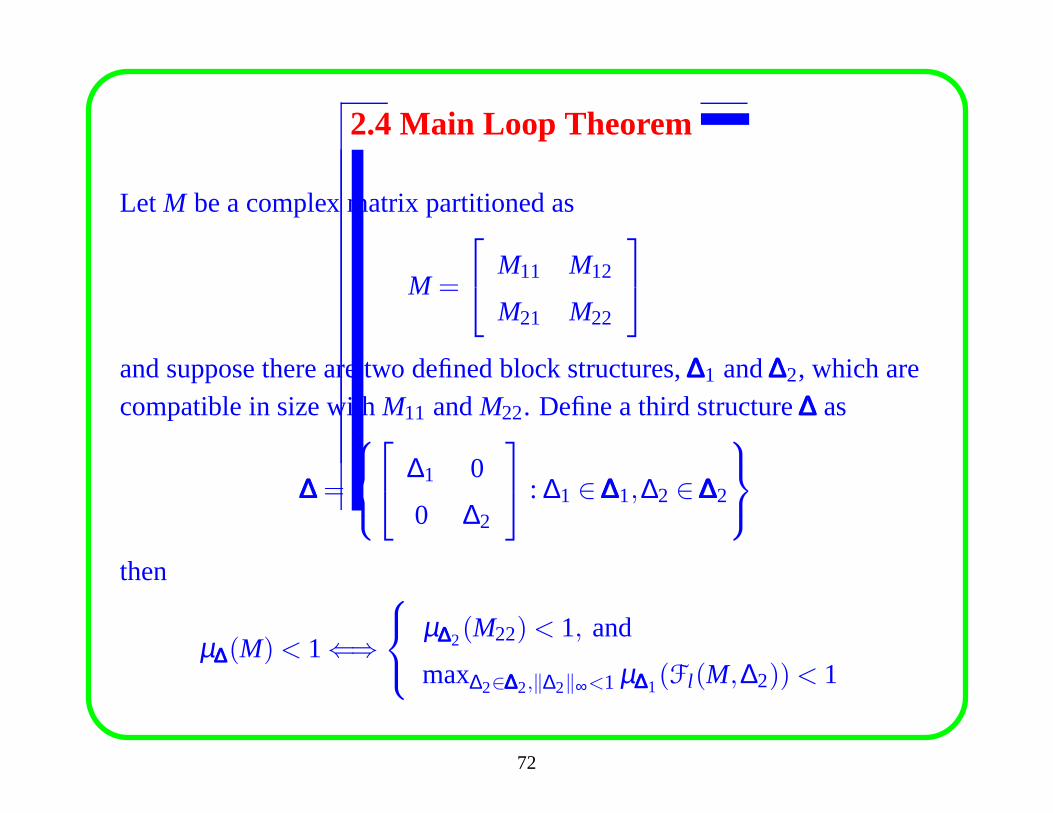
2.4 Main Loop Theorem
Let M be a complex matrix partitioned as
M =
M11 M12
M21 M22
and suppose there are two defined block structures,∆∆∆1 and∆∆∆2, which arecompatible in size withM11 andM22. Define a third structure∆∆∆ as
∆∆∆ =
∆1 0
0 ∆2
: ∆1 ∈∆∆∆1,∆2 ∈∆∆∆2
then
µ∆∆∆(M)< 1⇐⇒
µ∆∆∆2(M22)< 1, and
max∆2∈∆∆∆2,‖∆2‖∞<1 µ∆∆∆1(Fl (M,∆2))< 1
72
2.5 Mixed µµµ Analysis
The parameter variations are more realistically modeled with real
uncertainties. Denote the number ofreal repeated scalarblocks byRand
the dimensions are represented by positive integersr1, · · · , rR, i.e., thei’th
real repeated scalar block isr i × r i . Together with the notation of complexstructured singular value, we define the block structure∆∆∆ ⊂ Cn×n as
∆∆∆ =
diag[δ R1 Ir1, · · · ,δ R
r Irr ,δC1 Ic1, · · · ,δC
c Icc,∆1, · · · ,∆F ] :
δ Ri ∈ R,δC
j ∈ C,∆k ∈ Cmk×mk
For consistency among all dimensions, we must have
r
∑i=1
r i +c
∑j=1
c j +F
∑k=1
mk = n
Then we can also define the structured singular value as before.
73
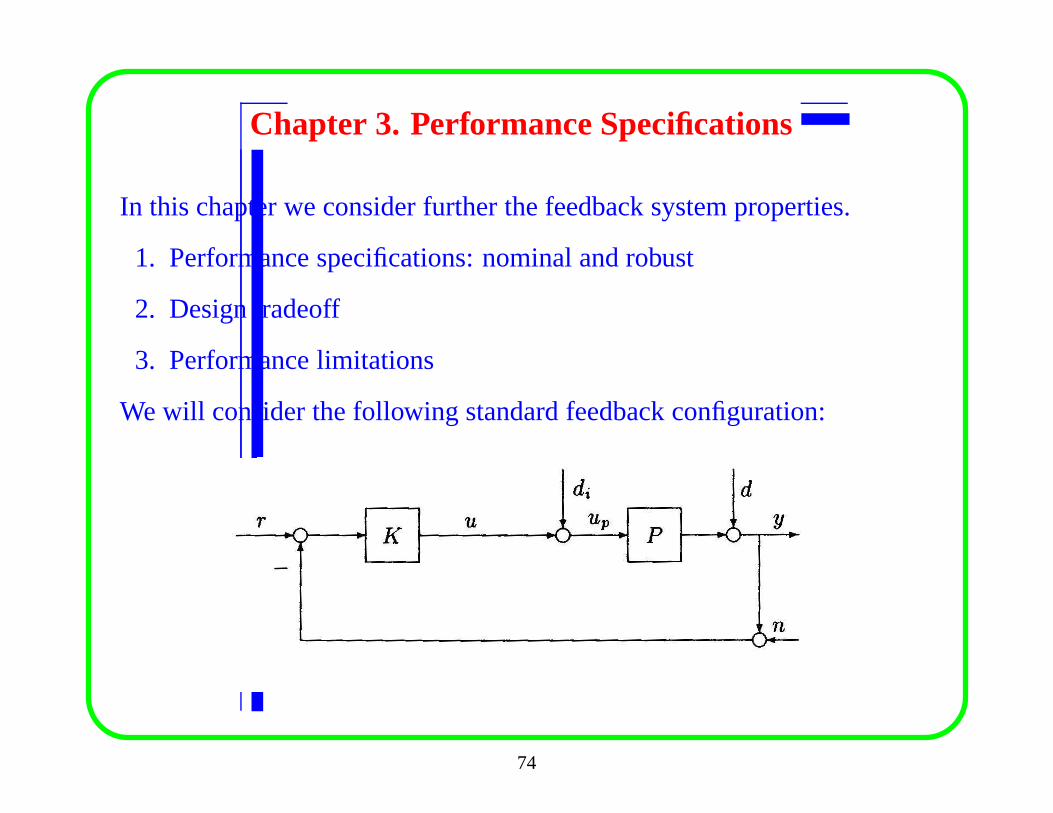
Chapter 3. Performance Specifications
In this chapter we consider further the feedback system properties.
1. Performance specifications: nominal and robust
2. Design tradeoff
3. Performance limitations
We will consider the following standard feedback configuration:
74
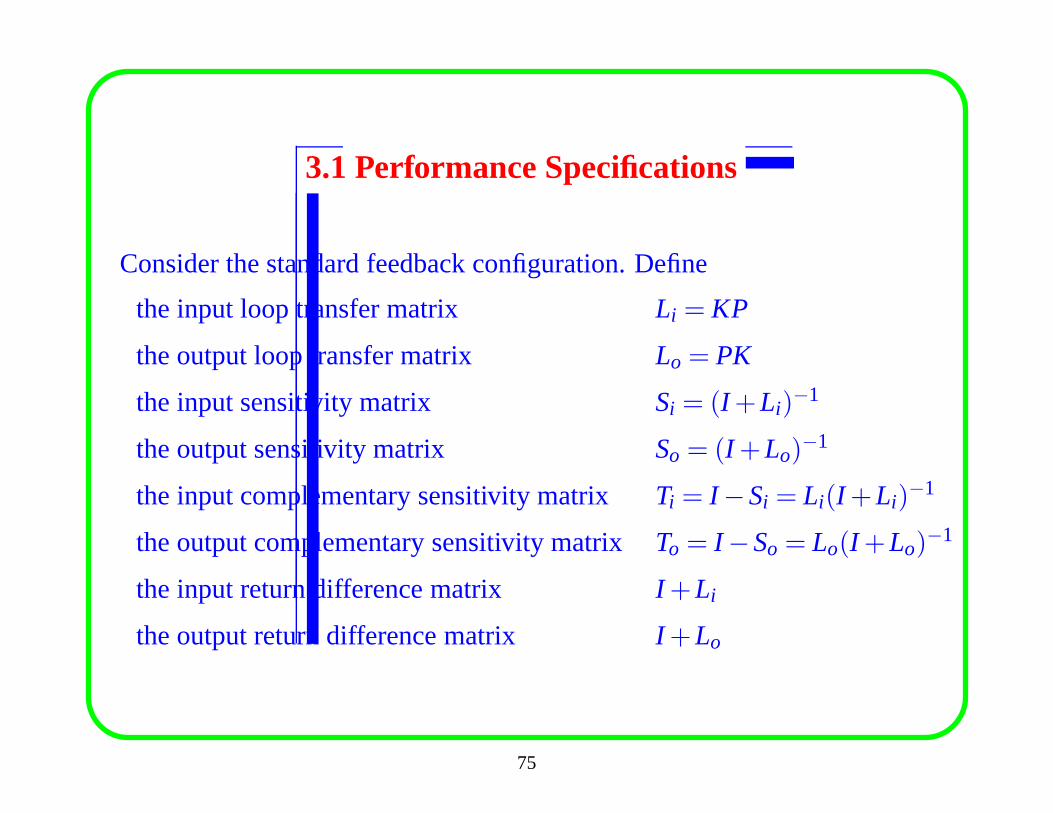
3.1 Performance Specifications
Consider the standard feedback configuration. Define
the input loop transfer matrix Li = KP
the output loop transfer matrix Lo = PK
the input sensitivity matrix Si = (I +Li)−1
the output sensitivity matrix So = (I +Lo)−1
the input complementary sensitivity matrix Ti = I −Si = Li(I +Li)−1
the output complementary sensitivity matrixTo = I −So = Lo(I +Lo)−1
the input return difference matrix I +Li
the output return difference matrix I +Lo
75
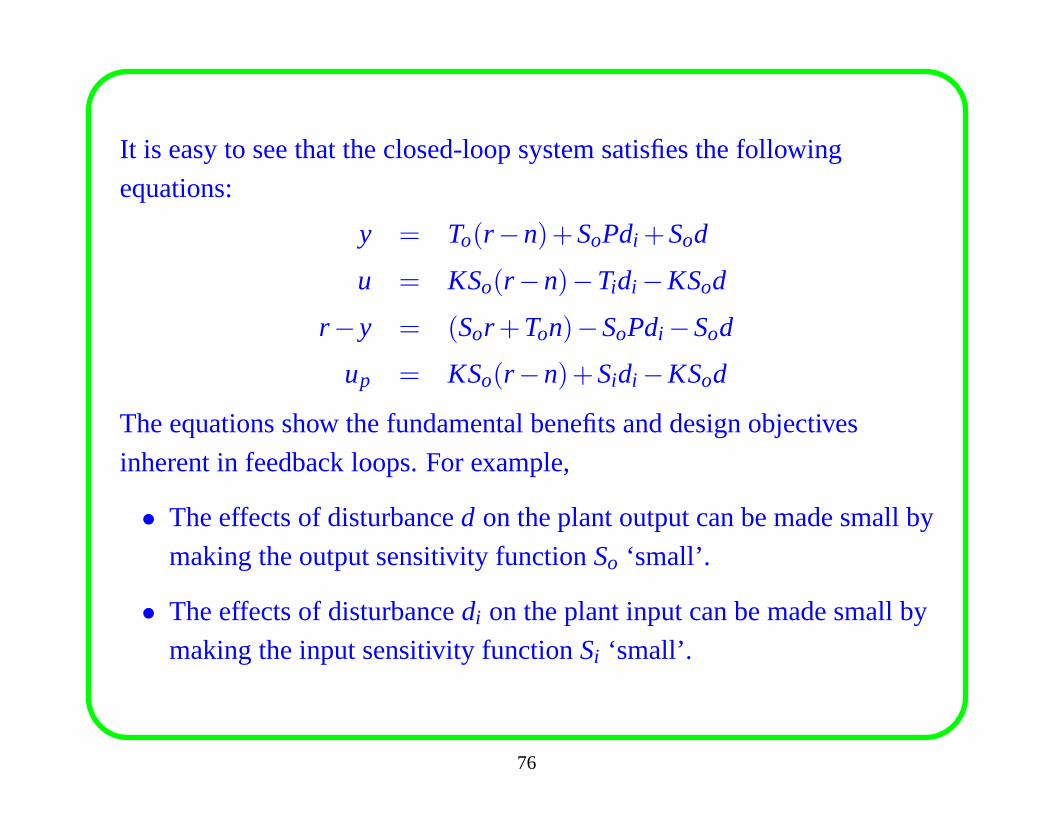
It is easy to see that the closed-loop system satisfies the following
equations:
y = To(r −n)+SoPdi +Sod
u = KSo(r −n)−Tidi −KSod
r −y = (Sor +Ton)−SoPdi −Sod
up = KSo(r −n)+Sidi −KSod
The equations show the fundamental benefits and design objectives
inherent in feedback loops. For example,
• The effects of disturbanced on the plant output can be made small by
making the output sensitivity functionSo ‘small’.
• The effects of disturbancedi on the plant input can be made small by
making the input sensitivity functionSi ‘small’.
76
With different assumption on the disturbance, we can formulate different
optimization problems for ‘optimal’ performance.
1. H∞H∞H∞ performance. The disturbance is assumed to be of bounded
power (RMS norm induced) or of bounded fuel (average-absolute
norm induced).
2. H2H2H2 performance. The disturbance is assumed to be white noise or
impulse, and the size ofy is taken as RMS value.
3. L1L1L1 performance. The disturbance is assumed to be bounded (L∞
induced).
77
H∞H∞H∞ Performance
As discussed in Chapter 4, theH∞-norm is the most used norm for asystem, thus it is a good measure for system performance. Note that theH∞-norm of a matrix equals the maximum singular value, so gooddisturbance rejection at the plant output (y) and the plant input (up)requires that
σ(So) = σ((I +PK)−1) =1
σ(I +PK)(for the effect ofd on y)
σ(SoP) = σ((I +PK)−1P) = σ(PSi) (for the effect ofdi ony)
σ(Si) = σ((I +KP)−1) =1
σ(I +KP)(for the effect ofdi onup)
σ(KSo) = σ(K(I +PK)−1) = σ(KSo) (for the effect ofd onup)
be small, particularly in the low-frequency range whered anddi areusually significant.
78
Note thatσ(PK)−1≤ σ(I +PK)≤ σ(PK)+1
σ(KP)−1≤ σ(I +KP)≤ σ(KP)+1
then1
σ(PK)+1≤ σ(So)≤
1σ(PK)−1
, if σ(PK)> 1
1σ(KP)+1
≤ σ(Si)≤1
σ(KP)−1, if σ(KP)> 1
These equations imply that
σ(So)≪ 1⇐⇒ σ(PK)≫ 1
σ(Si)≪ 1⇐⇒ σ(KP)≫ 1
σ(SoP)≈ σ(K−1) =1
σ(K), whenσ(PK)≫ 1 or σ(KP)≫ 1
σ(KSo)≈ σ(P−1) =1
σ(P), whenσ(PK)≫ 1 or σ(KP)≫ 1
79
Hence
• Good performance at plant output requires, in general, large output
loop gainσ(PK)≫ 1 in the frequency range whered is significant
and large enough controller gainσ(K)≫ 1 in the frequency range
wheredi is significant.
• Good performance at plant input requires, in general, largeinput loop
gainσ(KP)≫ 1 in the frequency range wheredi is significant and
large enough plant gainσ(P)≫ 1 in the frequency range whered is
significant.
So good multivariable feedback loop design boils down to achieving high
loop (and possibly controller) gains in the necessary frequency range.
80
3.2 Design Tradeoff
Despite the simplicity of the performance, feedback designis by no
means trivial. This is true because loop gains cannot be madearbitrarily
high over arbitrarily large frequency ranges. Rather, theymust satisfy
certain performance tradeoff and design limitations.
Typical tradeoffs are:
• Conflict between commands and disturbance error reduction (So
small) versus robust stability (To small for multiplicative uncertainty).
• Conflict between disturbance rejection (So small) and the sensor
noise reduction (To small).
• Conflict between disturbance rejection (So small) and the control
effort.
81
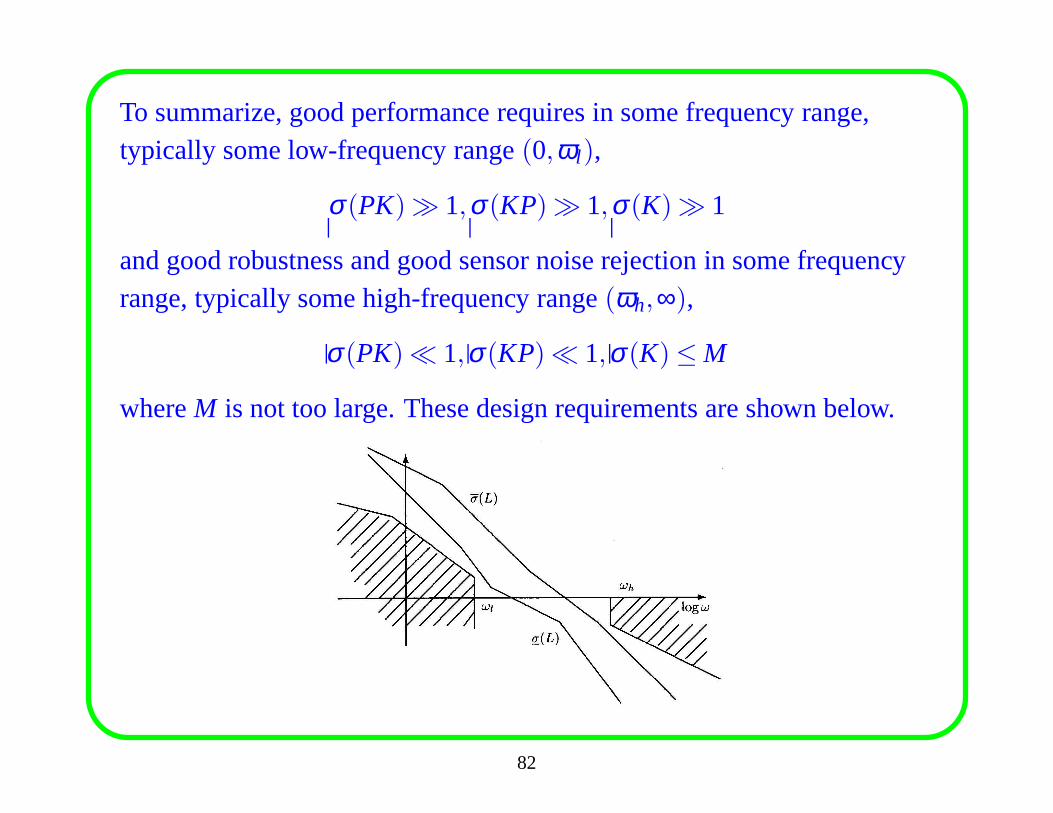
To summarize, good performance requires in some frequency range,typically some low-frequency range(0,ωl ),
σ(PK)≫ 1,σ(KP)≫ 1,σ(K)≫ 1
and good robustness and good sensor noise rejection in some frequencyrange, typically some high-frequency range(ωh,∞),
σ(PK)≪ 1,σ(KP)≪ 1,σ(K)≤ M
whereM is not too large. These design requirements are shown below.
82
3.3 Robust Performance
Stability is not the only property of a closed-loop system that must be
robust to perturbations. We also need ‘robust performance’, i.e., the
closed-loop performance will not degrade under perturbation.
We consider the following problem:
• Nominal Performance. Disturbance rejection on plant output
requires
‖We(I +PK)−1‖∞ < 1
• Robust Stability. Suppose the plant is under multiplicative
uncertainty, i.e.,P∆ = (I +∆SWy)P with ‖∆S‖∞ ≤ 1, then robust
stability requires
‖WyPK(I +PK)−1‖∞ < 1
83
• Robust Performance. Suppose the plant is under multiplicative
uncertainty, and we require the robust performance
‖We(I +P∆K)−1‖∞ < 1
for all P∆ = (I +∆SWy)P with ‖∆S‖∞ ≤ 1.
Define a full block∆S∆S∆S and a full block∆P∆P∆P as
∆S∆S∆S= {∆S∈ RH∞ with compatible dimension withWyT : ‖∆S‖∞ < 1}
∆P∆P∆P = {∆P ∈ RH∞ with compatible dimension withWeS: ‖∆P‖∞ < 1}Then the robust performance problem can be stated as:
µ∆S∆S∆S(WyT)< 1, andµ∆∆∆P(WeS(I +∆SWyT)
−1)< 1,∀∆S∈∆S∆S∆S
whereS= (I +PK)−1,T = PK(I +PK)−1.
84
Robust Performance and Robust Stability
The robust performance problem can be transformed to a robust stabilityproblem by the Main Loop Theorem. Define an augmented blockstructure
∆∆∆ :=
∆P 0
0 ∆S
: ∆P ∈∆P∆P∆P,∆S∈∆S∆S∆S
Since
We(I +P∆K)−1 =WeS(I +∆SWyT)−1 = Fl
WeS −WeS
WyT −WyT
,∆S
By the main loop theorem, the robust performance problem amounts to
µ∆∆∆
WeS −WeS
WyT −WyT
< 1
85
Condition of Robust Performance for SISO Systems
For a SISO system, a necessary and sufficient condition for robustperformance is
‖|WeS|+ |WyT|‖∞ < 1
that is
µ∆∆∆
WeS −WeS
WyT −WyT
= ‖|WeS|+ |WyT|‖∞
To prove this, for simplicity, assumeWe = 1,Wy = 1, the upper bound ofthe SSV at each frequency is equal to
maxω supd1
|1+PK|σ
1 0
0 d
1 −1
PK −PK
1 0
0 d−1
= maxω supd
√(1+P∗K∗d∗dPK)(1+d−1d−1∗)
|1+PK| = maxω1+|PK||1+PK| = maxω(|S|+ |T|)
86
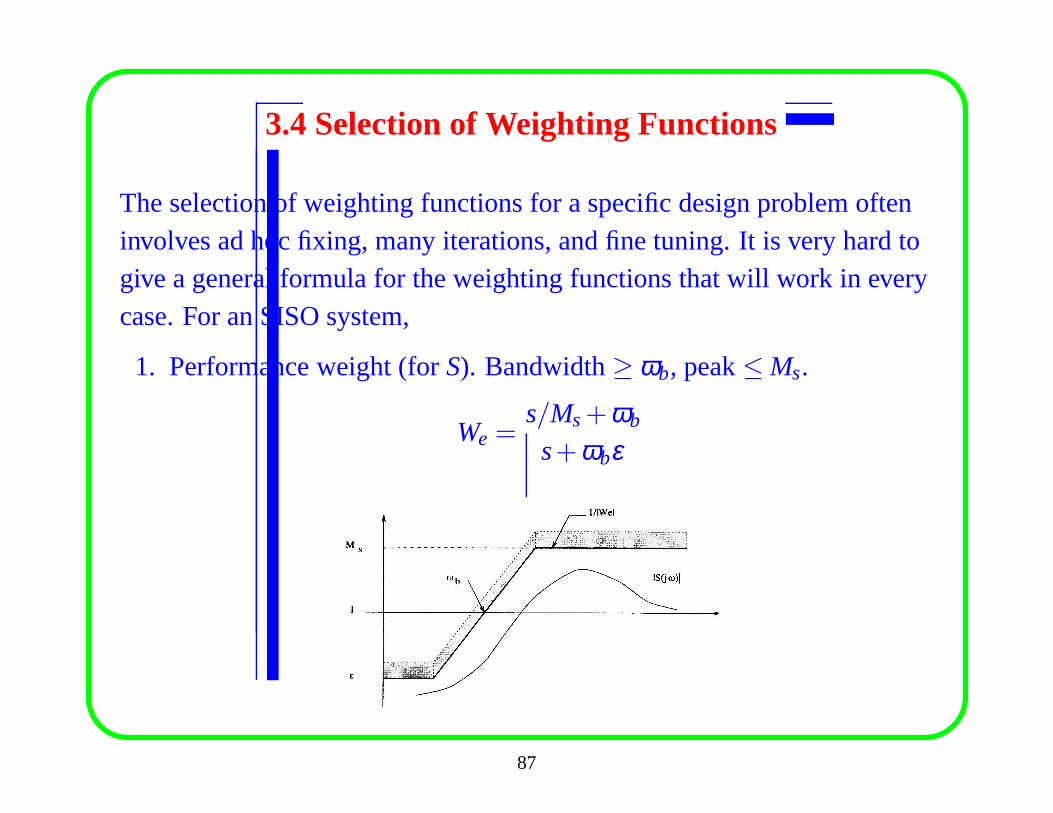
3.4 Selection of Weighting Functions
The selection of weighting functions for a specific design problem ofteninvolves ad hoc fixing, many iterations, and fine tuning. It isvery hard togive a general formula for the weighting functions that willwork in everycase. For an SISO system,
1. Performance weight (forS). Bandwidth≥ ωb, peak≤ Ms.
We =s/Ms+ωb
s+ωbε
87
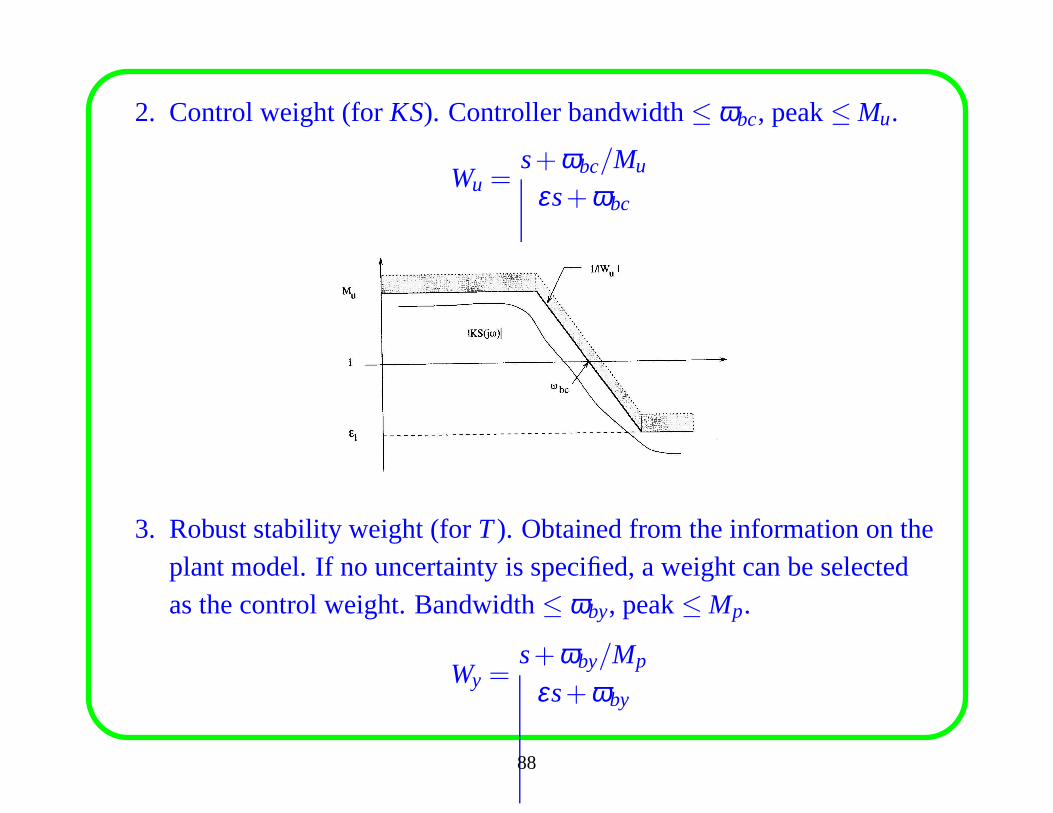
2. Control weight (forKS). Controller bandwidth≤ ωbc, peak≤ Mu.
Wu =s+ωbc/Mu
εs+ωbc
3. Robust stability weight (forT). Obtained from the information on theplant model. If no uncertainty is specified, a weight can be selectedas the control weight. Bandwidth≤ ωby, peak≤ Mp.
Wy =s+ωby/Mp
εs+ωby
88
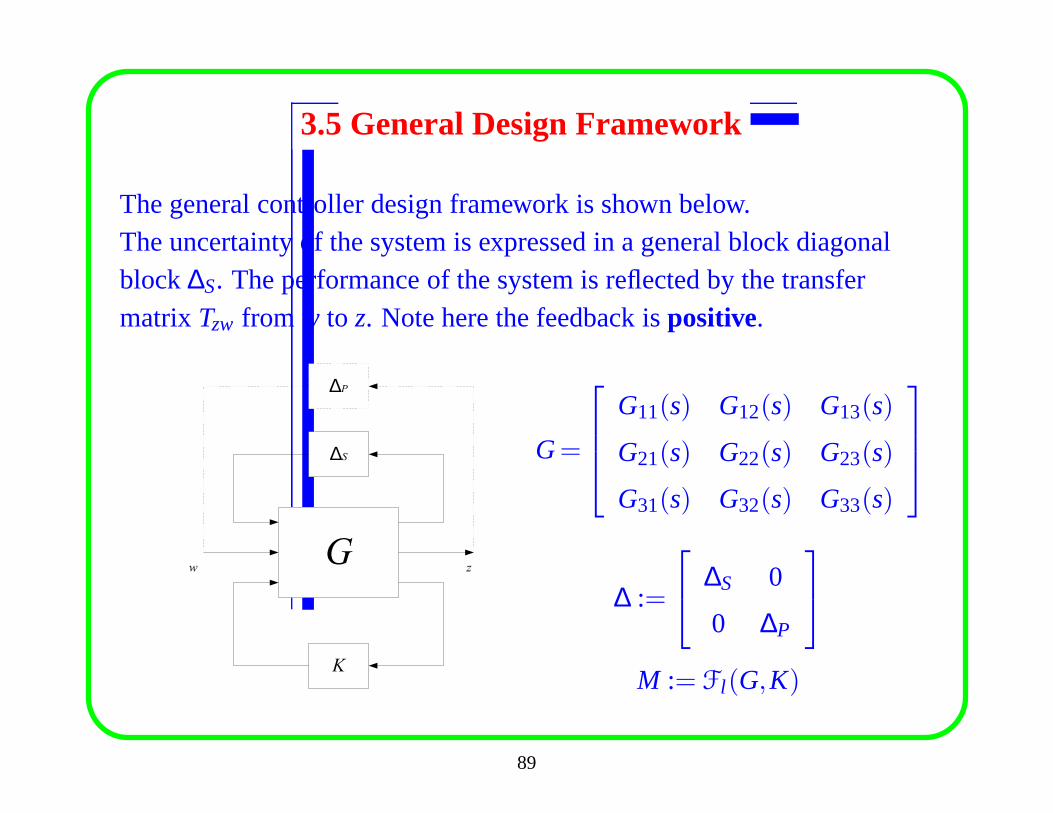
3.5 General Design Framework
The general controller design framework is shown below.The uncertainty of the system is expressed in a general blockdiagonalblock ∆S. The performance of the system is reflected by the transfermatrix Tzw from w to z. Note here the feedback ispositive.
G
∆S
K
w z
∆P
G=
G11(s) G12(s) G13(s)
G21(s) G22(s) G23(s)
G31(s) G32(s) G33(s)
∆ :=
∆S 0
0 ∆P
M := Fl (G,K)
89
3.6 Summary of Controller Synthesis Methods
1. Nominal Performance (∆S= 0). Now the first row and first columnare zero, i.e.,G is partitioned by 2×2.
(a) H∞H∞H∞ performance. The disturbance is assumed to be of boundedpower (RMS norm induced) or of bounded fuel (average-absolutenorm induced).
minK
‖Fl (G,K)‖∞
(b) H2H2H2 performance. The disturbance is assumed to be white noiseor impulse, and the size ofy is taken as RMS value.
minK
‖Fl (G,K)‖2
(c) L1L1L1 performance. The disturbance is assumed to be bounded (L∞
induced).min
K‖Fl (G,K)‖1
90
2. Robust Stability (∆P = 0). Now the second row and second columnare zero.G is also partitioned by 2×2.
(a) H∞H∞H∞ analysis. For unstructured uncertainty,
minK
‖Fl (G,K)‖∞
(b) µµµ analysis. For structured uncertainty,
minK
‖Fl (G,K)‖µ
3. Robust Performance.
(a) RobustH∞H∞H∞ performance. Nominal performance expressed in
H∞ and robust stability expressed inH∞ or µ. By the Main Loop
Theorem, we have aµµµ synthesisproblem.
minK
‖Fl (G,K)‖µ
(b) RobustH2H2H2 performance.
91
4. Nominal Performance + Robust Stability.
Robust performance is not easy to obtained. Sometimes we areonly
concerned withnominal performance and robust stability, instead of
robust performance.
(a) Mixed H2/H∞H2/H∞H2/H∞ problem. Nominal performance inH2 and robust
stability inH∞.
minK
‖Fl (G1,K)‖2
under the constraint
‖Fl (G2,K)‖∞ < 1
(b) Multi-objective H∞H∞H∞ problem. Nominal performance inH∞ and
robust stability inH∞.
minK
‖Fl (G1,K)‖∞
92
under the constraint
‖Fl (G2,K)‖∞ < 1
(c) Mixed H2/µH2/µH2/µ problem. Nominal performance inH2 and robust
stability in µ.
minK
‖Fl (G1,K)‖2
under the constraint
‖Fl (G,K)‖µ < 1
(d) Mixed L1/H∞L1/H∞L1/H∞ problem. Nominal performance inL1 and robust
stability inH∞.
minK
‖Fl (G1,K)‖1
under the constraint
‖Fl (G2,K)‖∞ < 1
93
Chapter 4. Robust Controller Synthesis
We have discussed performance specifications and tradeoffs. One simple
method to achieve performance specifications and tradeoffsis loop
shaping. The procedure of designing controllers by changing the shapes
of the (closed- and/or open-) loops of a system is calledloop shaping.There are two kinds of loop shaping methods:
(1) Shape the closed loopsS, T, or KS;
(2) Shape the open loopL.
We will discuss these methods in this chapter.
94
4.1 Shaping the Closed Loops
We can directly change the shapes of the closed loops (sensitivity function
and the mixed sensitivity function) to achieve the desired performance.
1. S-T Approach.
Consider the robust performance problem:
• Nominal Performance:‖WeS‖∞ < 1
• Perturbed model:P∆ = (I +∆Wy)P with ‖∆‖∞ < 1.
A test for the robust performance problem of a SISO system is
‖|WeS|+ |WyT|‖∞ < 1
A compromise condition for the robust performance test is
‖(|WeS|2+ |WyT|2)1/2‖∞ < 1
95
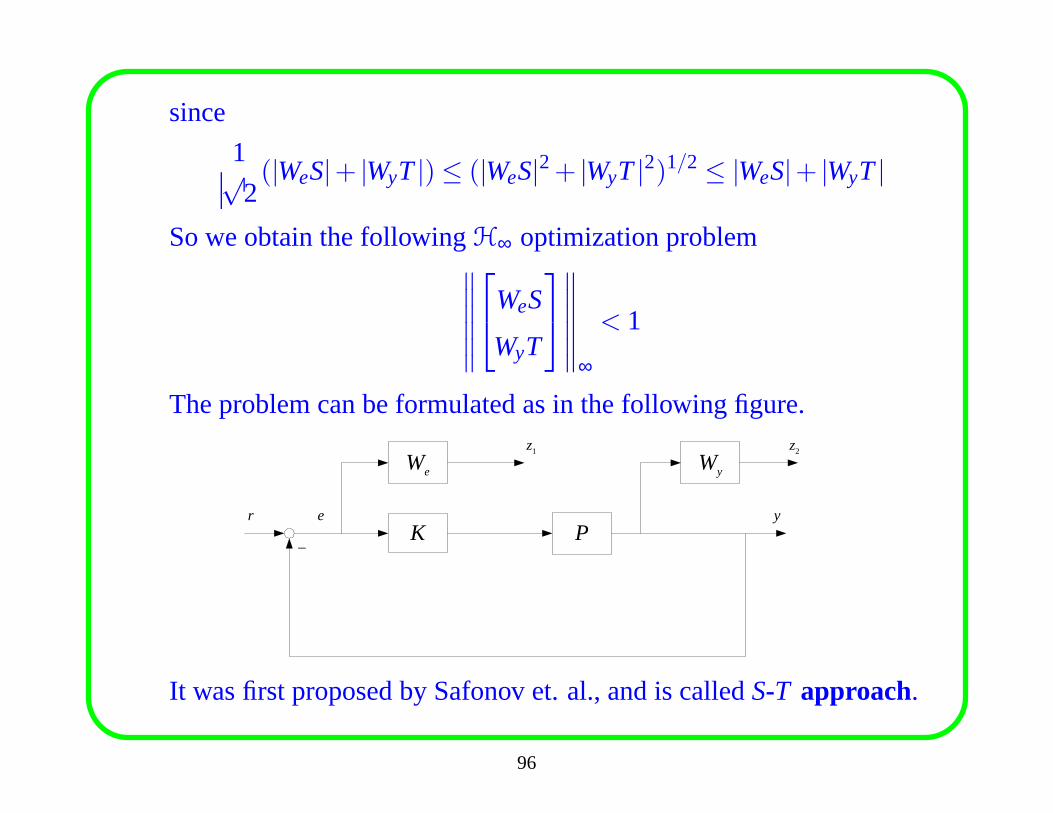
since
1√2(|WeS|+ |WyT|)≤ (|WeS|2+ |WyT|2)1/2 ≤ |WeS|+ |WyT|
So we obtain the followingH∞ optimization problem∥∥∥∥∥∥
WeS
WyT
∥∥∥∥∥∥
∞
< 1
The problem can be formulated as in the following figure.
K P
Wy
r
_
y
We
e
z1 z2
It was first proposed by Safonov et. al., and is calledS-T approach.
96

2. S-KSApproach.
Consider the robust performance problem:
• Nominal Performance:‖WeS‖∞ < 1
• Perturbed model:P∆ = P+∆Wu with ‖∆‖∞ < 1.
A test for the robust performance problem of a SISO system is
‖|WeS|+ |WuKS|‖∞ < 1
A compromise condition for the test is
‖(|WeS|2+ |WuKS|2)1/2‖∞ < 1
or ∥∥∥∥∥∥
WeS
WuKS
∥∥∥∥∥∥
∞
< 1
97
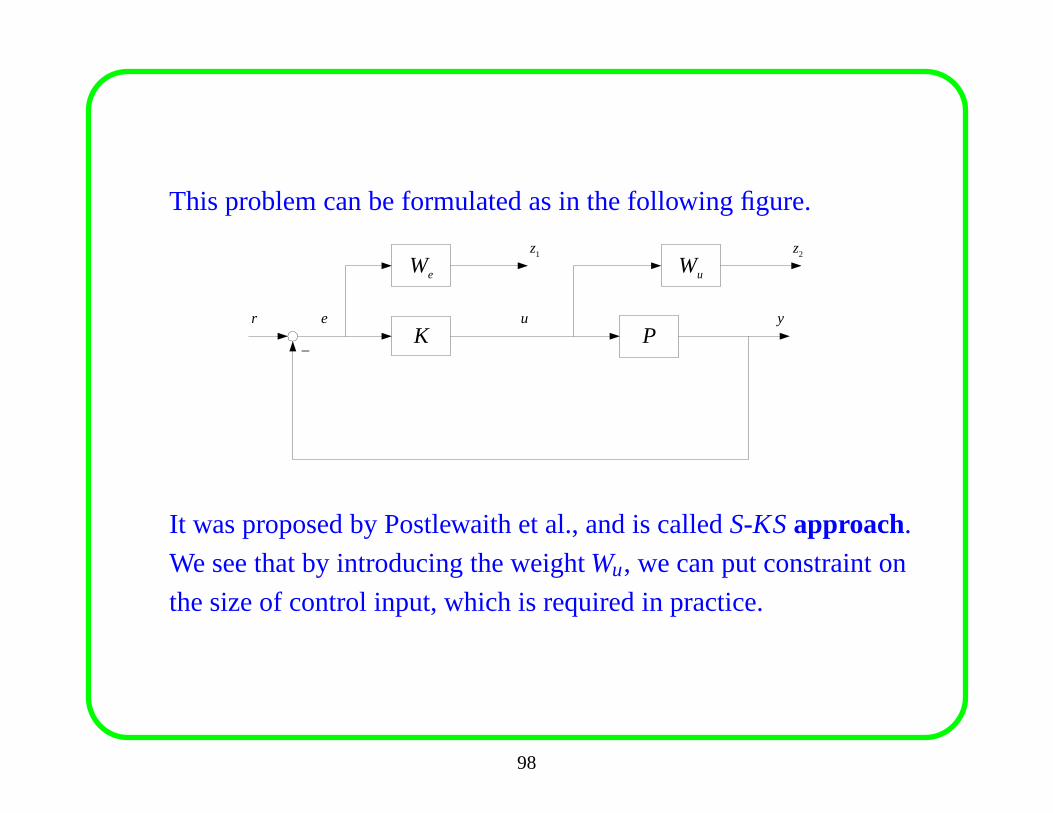
This problem can be formulated as in the following figure.
K P
Wu
r
_
y
We
e
z1 z2
u
It was proposed by Postlewaith et al., and is calledS-KSapproach.
We see that by introducing the weightWu, we can put constraint on
the size of control input, which is required in practice.
98
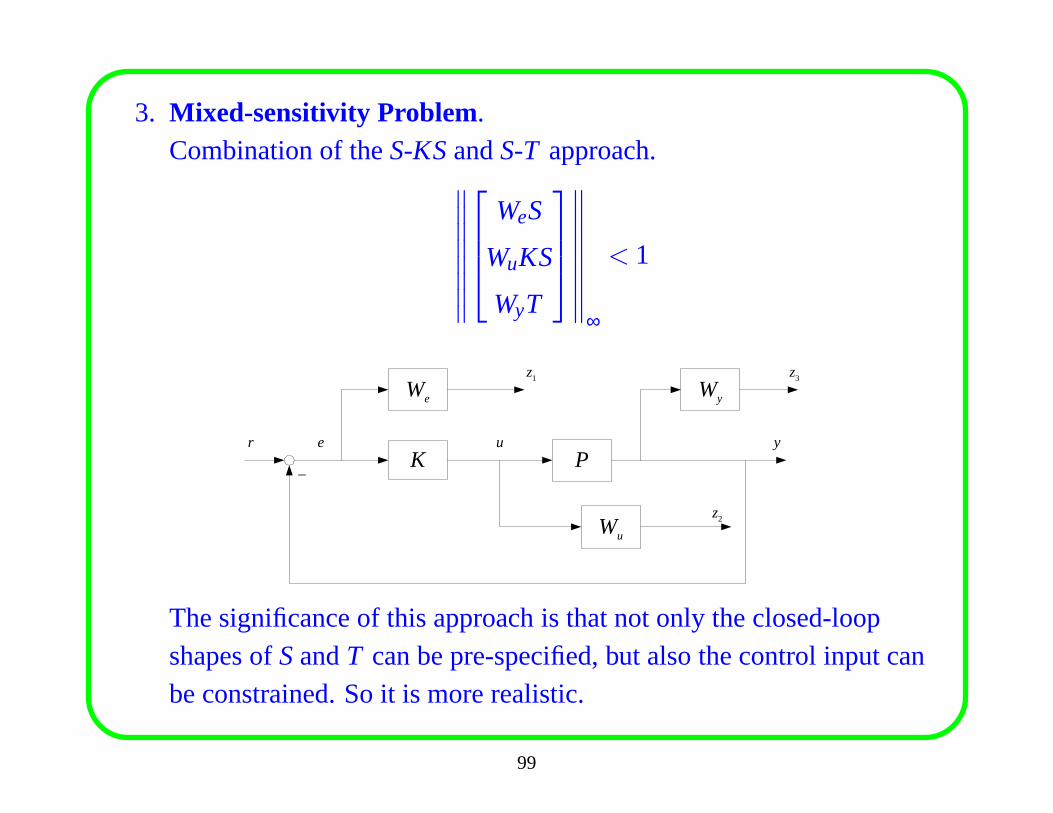
3. Mixed-sensitivity Problem.Combination of theS-KSandS-T approach.
∥∥∥∥∥∥∥∥
WeS
WuKS
WyT
∥∥∥∥∥∥∥∥
∞
< 1
K P
Wy
r
_
y
We
e
z1 z3
Wu
u
z2
The significance of this approach is that not only the closed-loopshapes ofSandT can be pre-specified, but also the control input canbe constrained. So it is more realistic.
99
Remarks on Mixed-Sensitivity Approach
• When the plant is strictly proper, i.e.,Dp = 0, then the ‘D12’ block of
theS-T problem is singular, thus violates the regularity assumption
of the standardH∞ problem. To solve this problem, we can perturb
Dp to Dp = Dp+ ε I with a smallε .
• TheS-KS is regular as long asDu is nonzero, which can always be
guaranteed. So it is with the mixed sensitivity problem.
• When the plant contains integrators, i.e.,Ap has zero eigenvalues,
then the regularity assumption (A1) or (A3) might not be guaranteed.
In this case we can perturbAp to Ap = Ap+ ε I with a smallε .
• TheH∞ controller of the mixed sensitivity problems always cancels
the stable poles of the plant with its transmission zeros, which is
undesired if the plant contains slow-mode poles.
100
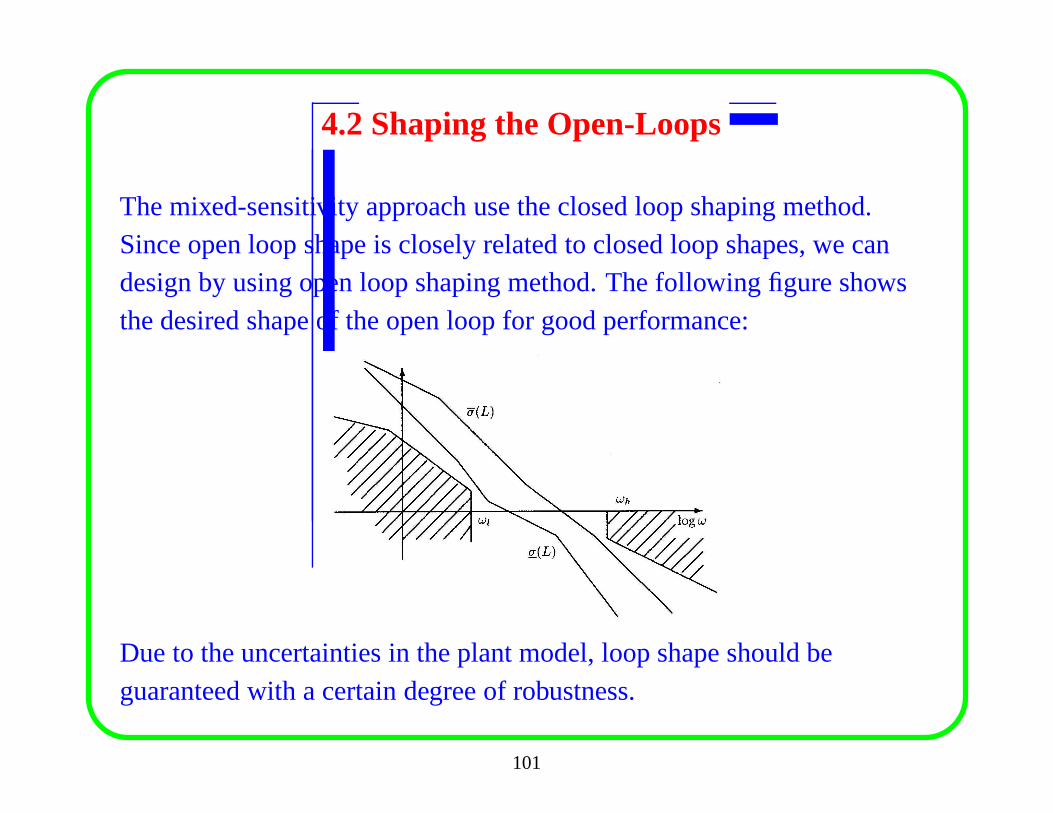
4.2 Shaping the Open-Loops
The mixed-sensitivity approach use the closed loop shapingmethod.Since open loop shape is closely related to closed loop shapes, we candesign by using open loop shaping method. The following figure showsthe desired shape of the open loop for good performance:
Due to the uncertainties in the plant model, loop shape should beguaranteed with a certain degree of robustness.
101
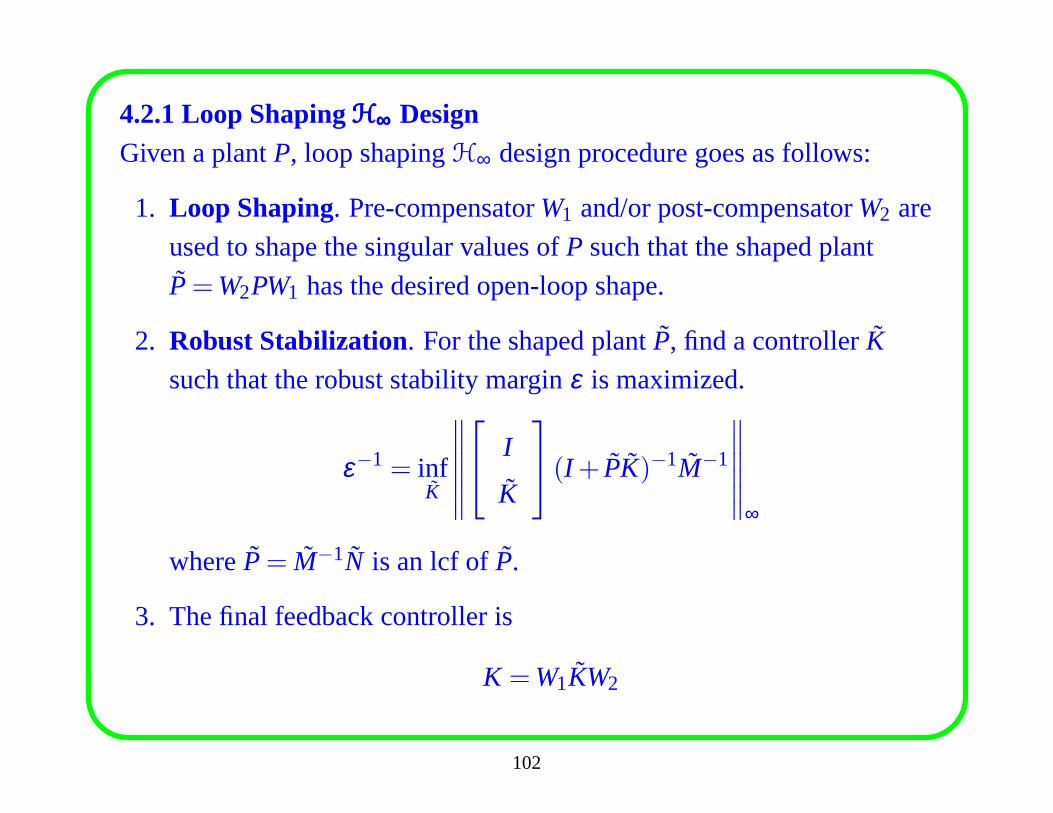
4.2.1 Loop ShapingH∞H∞H∞ DesignGiven a plantP, loop shapingH∞ design procedure goes as follows:
1. Loop Shaping. Pre-compensatorW1 and/or post-compensatorW2 are
used to shape the singular values ofP such that the shaped plant
P=W2PW1 has the desired open-loop shape.
2. Robust Stabilization. For the shaped plantP, find a controllerK
such that the robust stability marginε is maximized.
ε−1 = infK
∥∥∥∥∥∥
I
K
(I + PK)−1M−1
∥∥∥∥∥∥
∞
whereP= M−1N is an lcf ofP.
3. The final feedback controller is
K =W1KW2
102
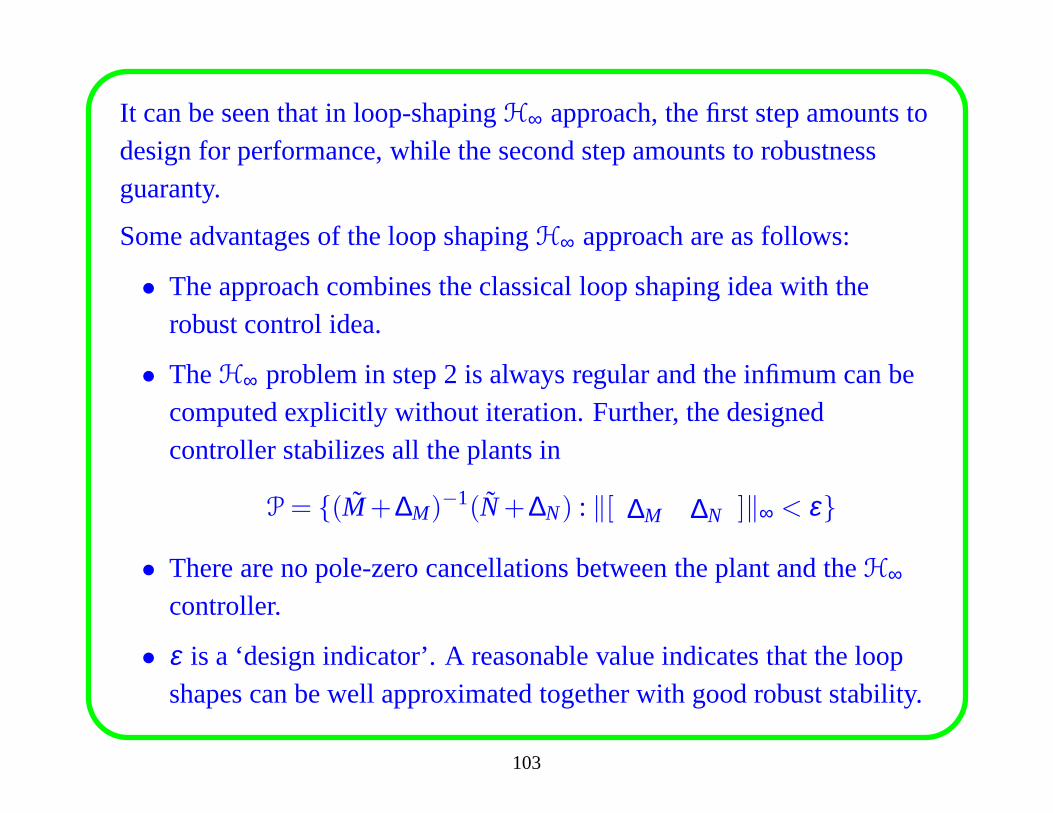
It can be seen that in loop-shapingH∞ approach, the first step amounts todesign for performance, while the second step amounts to robustnessguaranty.
Some advantages of the loop shapingH∞ approach are as follows:
• The approach combines the classical loop shaping idea with therobust control idea.
• TheH∞ problem in step 2 is always regular and the infimum can becomputed explicitly without iteration. Further, the designedcontroller stabilizes all the plants in
P= {(M+∆M)−1(N+∆N) : ‖[ ∆M ∆N ]‖∞ < ε}
• There are no pole-zero cancellations between the plant and theH∞
controller.
• ε is a ‘design indicator’. A reasonable value indicates that the loopshapes can be well approximated together with good robust stability.
103
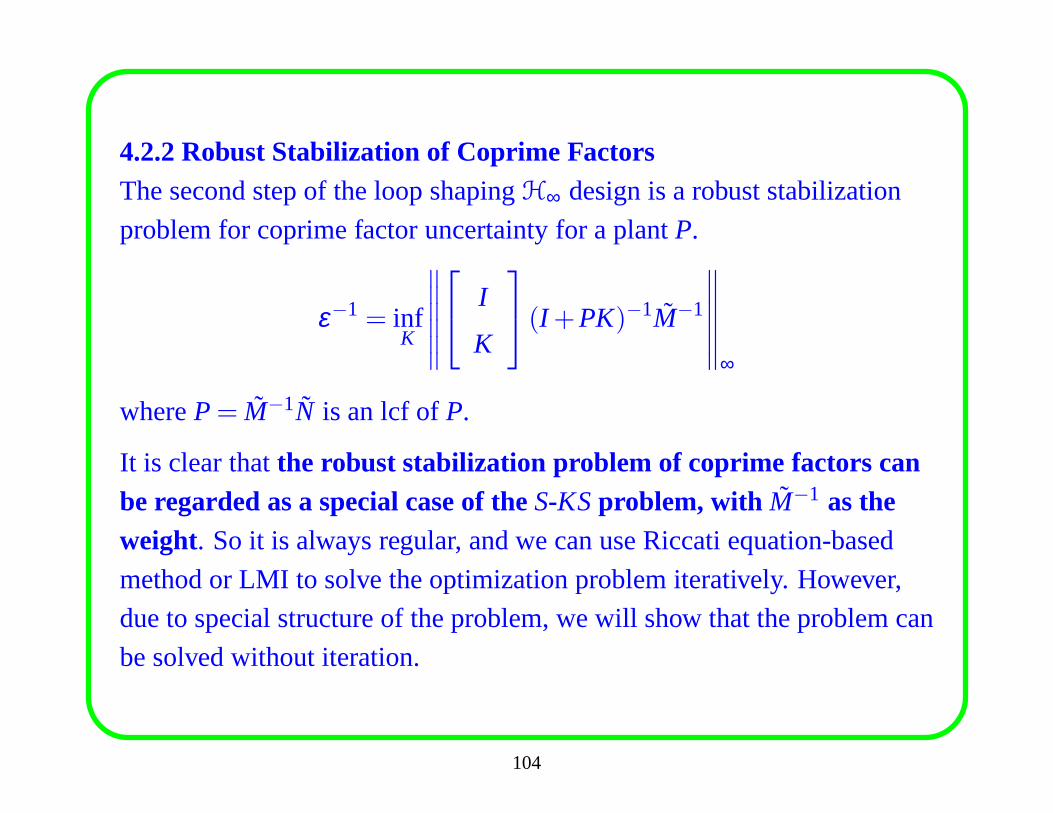
4.2.2 Robust Stabilization of Coprime FactorsThe second step of the loop shapingH∞ design is a robust stabilization
problem for coprime factor uncertainty for a plantP.
ε−1 = infK
∥∥∥∥∥∥
I
K
(I +PK)−1M−1
∥∥∥∥∥∥
∞
whereP= M−1N is an lcf ofP.
It is clear thatthe robust stabilization problem of coprime factors canbe regarded as a special case of theS-KSproblem, with M−1 as theweight. So it is always regular, and we can use Riccati equation-based
method or LMI to solve the optimization problem iteratively. However,
due to special structure of the problem, we will show that theproblem can
be solved without iteration.
104
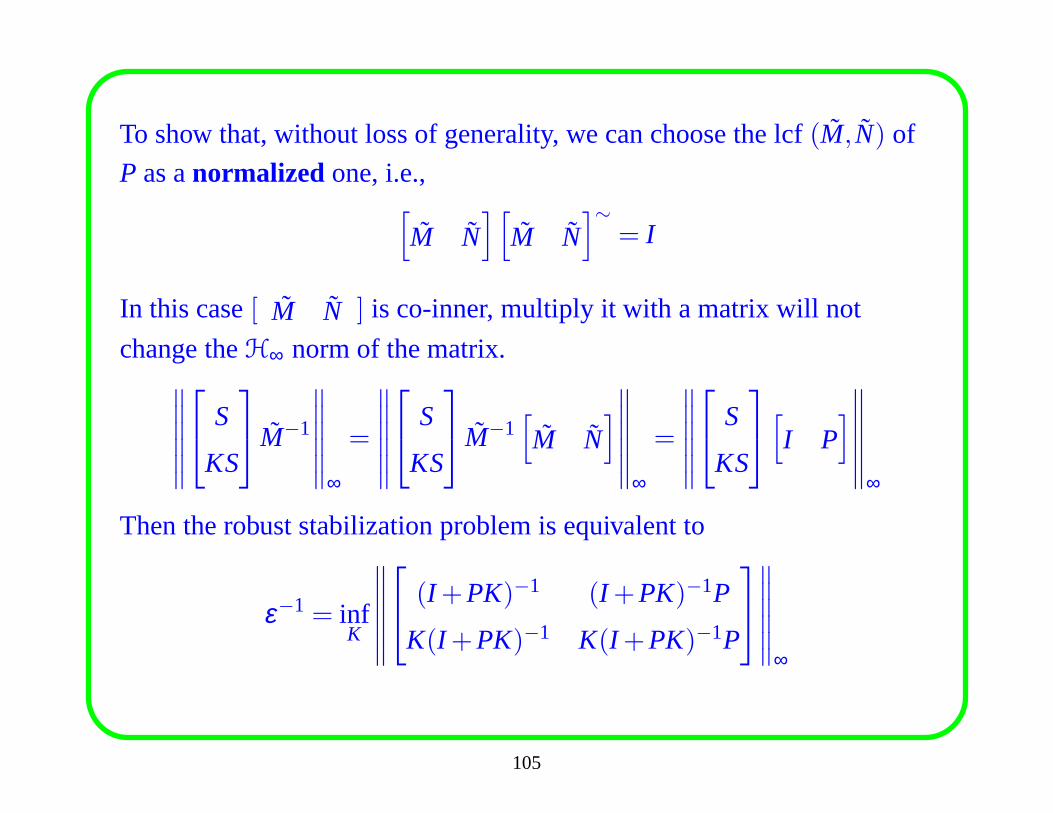
To show that, without loss of generality, we can choose the lcf (M, N) of
P as anormalized one, i.e.,[
M N][
M N]∼
= I
In this case[ M N ] is co-inner, multiply it with a matrix will not
change theH∞ norm of the matrix.∥∥∥∥∥∥
S
KS
M−1
∥∥∥∥∥∥
∞
=
∥∥∥∥∥∥
S
KS
M−1[
M N]
∥∥∥∥∥∥
∞
=
∥∥∥∥∥∥
S
KS
[
I P]
∥∥∥∥∥∥
∞
Then the robust stabilization problem is equivalent to
ε−1 = infK
∥∥∥∥∥∥
(I +PK)−1 (I +PK)−1P
K(I +PK)−1 K(I +PK)−1P
∥∥∥∥∥∥
∞
105
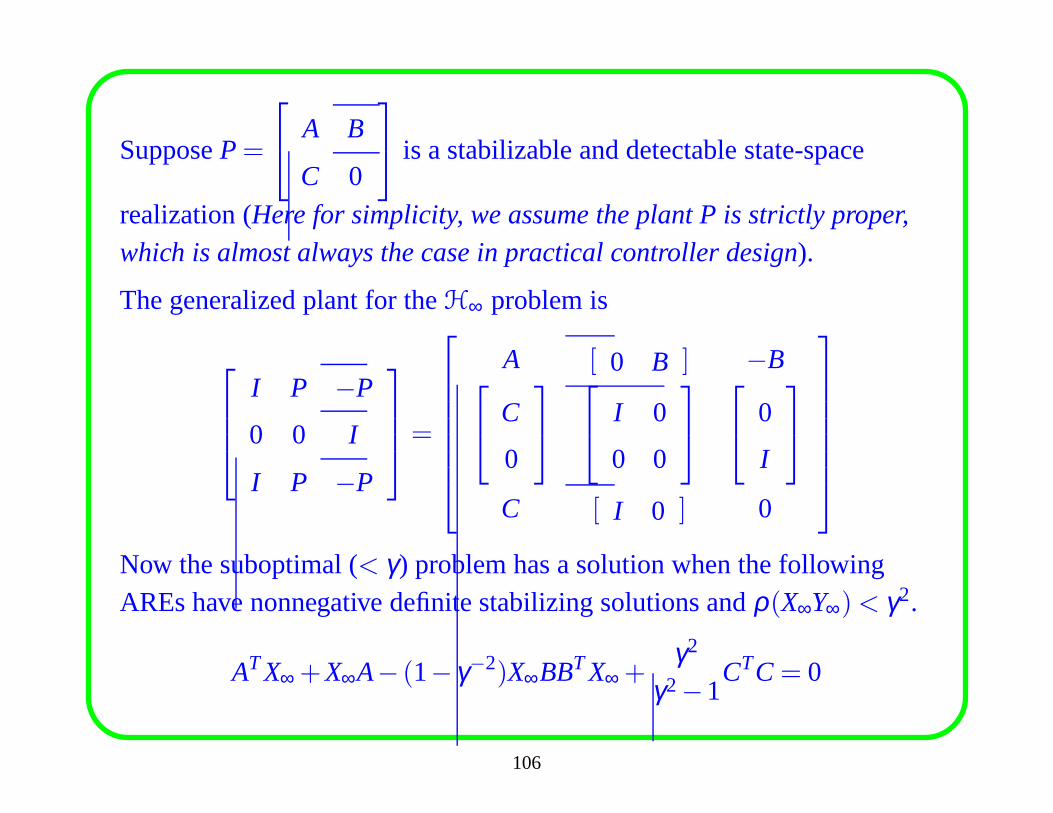
SupposeP=
A B
C 0
is a stabilizable and detectable state-space
realization (Here for simplicity, we assume the plant P is strictly proper,
which is almost always the case in practical controller design).
The generalized plant for theH∞ problem is
I P −P
0 0 I
I P −P
=
A [ 0 B ] −B
C
0
I 0
0 0
0
I
C [ I 0 ] 0
Now the suboptimal (< γ) problem has a solution when the followingAREs have nonnegative definite stabilizing solutions andρ(X∞Y∞)< γ2.
ATX∞ +X∞A− (1− γ−2)X∞BBTX∞ +γ2
γ2−1CTC= 0
106
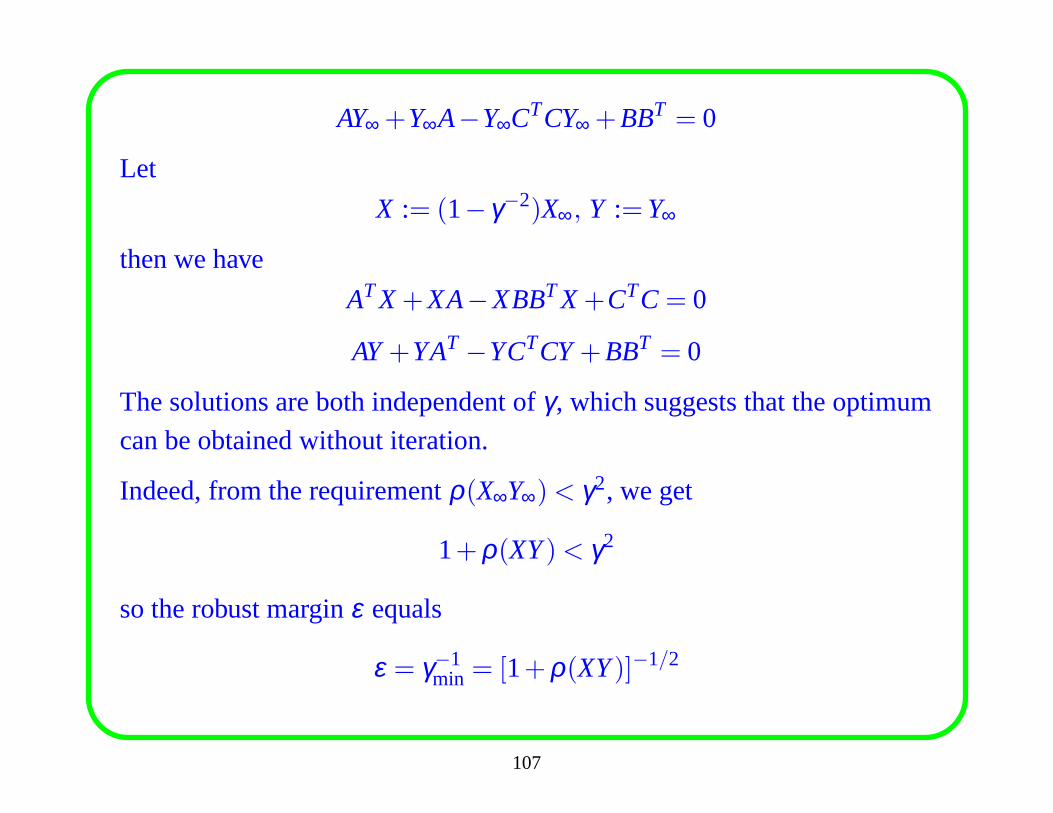
AY∞ +Y∞A−Y∞CTCY∞ +BBT = 0
Let
X := (1− γ−2)X∞, Y :=Y∞
then we have
ATX+XA−XBBTX+CTC= 0
AY+YAT −YCTCY+BBT = 0
The solutions are both independent ofγ, which suggests that the optimum
can be obtained without iteration.
Indeed, from the requirementρ(X∞Y∞)< γ2, we get
1+ρ(XY)< γ2
so the robust marginε equals
ε = γ−1min = [1+ρ(XY)]−1/2
107
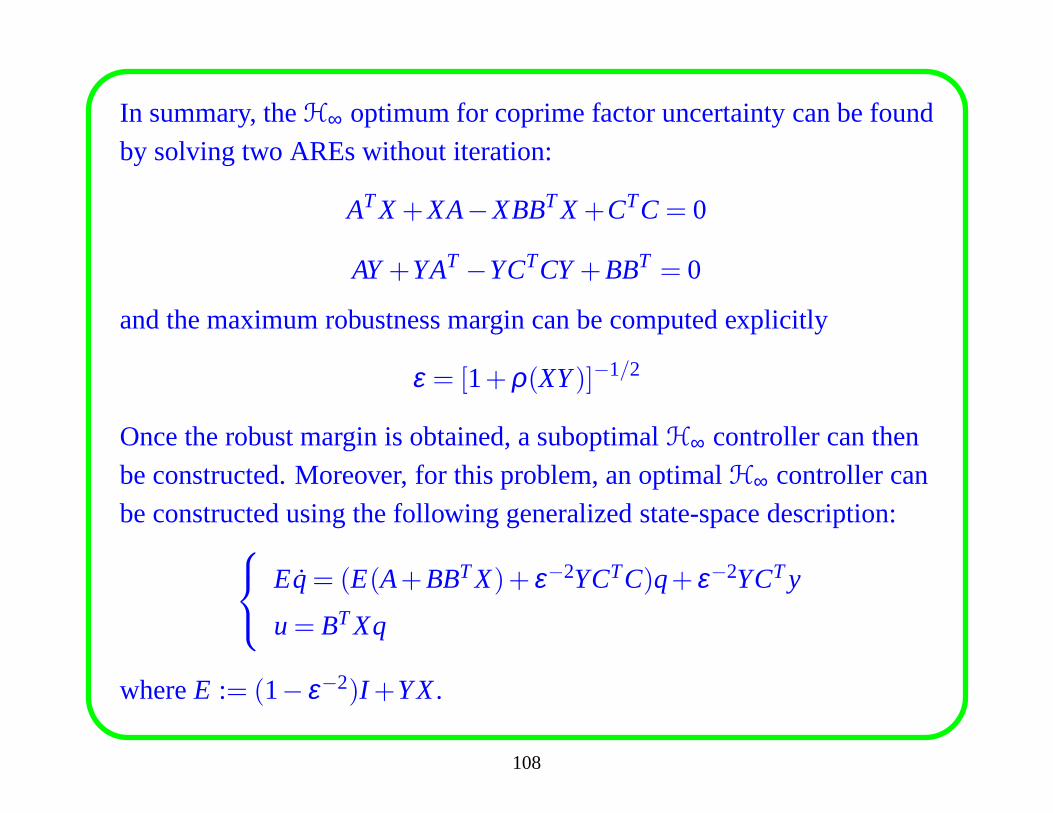
In summary, theH∞ optimum for coprime factor uncertainty can be found
by solving two AREs without iteration:
ATX+XA−XBBTX+CTC= 0
AY+YAT −YCTCY+BBT = 0
and the maximum robustness margin can be computed explicitly
ε = [1+ρ(XY)]−1/2
Once the robust margin is obtained, a suboptimalH∞ controller can then
be constructed. Moreover, for this problem, an optimalH∞ controller can
be constructed using the following generalized state-space description:
Eq= (E(A+BBTX)+ ε−2YCTC)q+ ε−2YCTy
u= BTXq
whereE := (1− ε−2)I +YX.
108
4.2.3 Design Procedure ofH∞H∞H∞ Loop-Shaping
1. Scale the plant outputs and inputs. This is very importantfor mostdesign procedures and is sometimes forgotten. In general, scalingimproves the conditioning of the design problem, it enablesmeaningful analysis to be made of the robustness propertiesof thefeedback system in the frequency domain.
2. Order the inputs and outputs so that the plant is as diagonal aspossible. The relative gain array (RGA) can be useful here.
3. Select the pre- and/or postcompensators to obtain the shaped plantP=W2PW1. The desired shapes normally mean high gain at lowfrequencies, roll-off rates of approximately 20 dB/decadeat thedesired bandwidth(s), and higher rates at high frequencies.
(a) W2 is usually chosen as a constant, reflecting the relativeimportance of the outputs to be controlled.
109
(b) In generalW1 has the formW1 =WpWaWg.
• Wp contains dynamic shaping. Integral action for lowfrequency performance; phase-advance for reducing the roll-offrates at crossover; and phase-lag to increase the roll-off rates athigh frequencies should all be placed inWp if desired.
• Wa is a constant that aligns the singular values at a desiredbandwidth (optional). This is effectively a constant decouplerand should not be used if the plant is ill-conditioned in terms oflarge RGA elements.
• Wg is an additional gain matrix to provide control over actuatorusage (optional). It is diagonal and adjusted so that the actuatorrate limits are not exceeded for reference demands and typicaldisturbances on the scaled plant outputs.
4. Robustly stabilize the shaped plantP. If the robust margin is toosmall (ε < 0.25), then go back to the previous step and modify theweights.
110
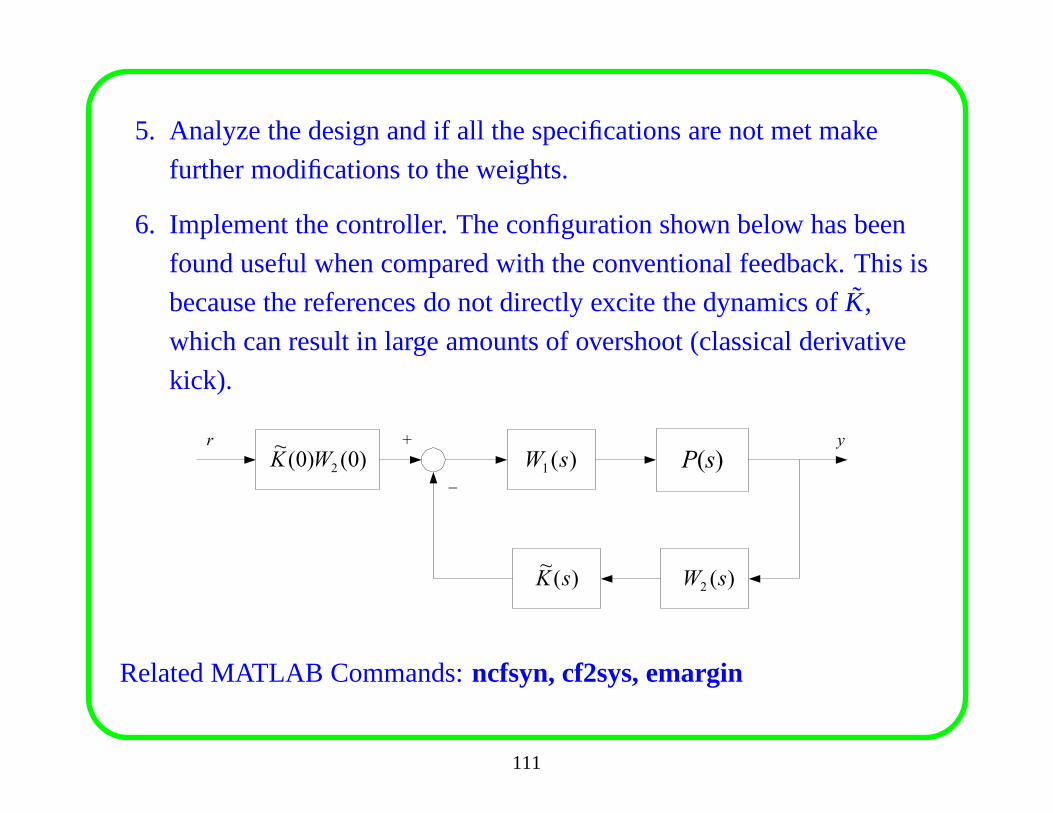
5. Analyze the design and if all the specifications are not metmake
further modifications to the weights.
6. Implement the controller. The configuration shown below has been
found useful when compared with the conventional feedback.This is
because the references do not directly excite the dynamics of K,
which can result in large amounts of overshoot (classical derivative
kick).
P(s)r y
_
+
)(~sK
)(1 sW
)(2 sW
)0()0(~
2WK
Related MATLAB Commands:ncfsyn, cf2sys, emargin
111
4.2.4 Guidelines for Loop Shaping DesignSome guidelines for the loop-shaping design:
• The loop transfer function should be shaped in such a way thatit has
low gain around the frequency of the modulus of any right-half plane
zeroz. Typically, it requires that the crossover frequency be much
smaller than the modulus of the right-half plane zero; say,ωc <|z|2
for any real zero andωc < |z| for any complex zero with a much
larger imaginary part than the real part.
• The loop transfer function should have a large gain around the
frequency of the modulus of any right-half plane pole.
• The loop transfer function should not have a large slope nearthe
crossover frequencies.
These guidelines are consistent with the rules used in classical control
theory.
112
Chapter 5. Model Reduction
Simple linear models/controllers are preferred over complex ones incontrol system design for some obvious reasons:
(1) Simple models are much easier to do analysis and synthesis with.
(2) Simple controllers are easier to implement and are more reliable.
(3) In the case of infinite dimensional system, the mode/controllerapproximation becomes essential.
A model order-reduction problem can, in general, be stated as follows:Given a full-order model G(s), find a low-order model (say, an rth ordermodel Gr ), such that G and Gr are close in some sense. There are manyways to define the closeness of an approximation. The most used norm istheL∞-norm. So the model reduction problem can be formulated as
infdeg(Gr )<r
‖G−Gr‖∞
113
5.1 Truncation Methods
Truncation methods of model reduction seek to remove or truncateunimportant states from state-space models. There are two options:
1. State-space truncation.Consider a linear, time-invariant system with the realization
G=
x(t) = Ax(t)+Bu(t), x(0) = x0
y(t) = Cx(t)+Du(t)
Divide the state vectorx into two components:
x(t) =
x1(t)
x2(t)
where ther-vectorx1(t) contains the components to be retained, andthe(n− r)-vectorx2(t) contains the components to be discarded.
114
Now partition the matricesA, B andC conformably withx to obtain
A=
A11 A12
A21 A22
,B=
B1
B2
,C=[
C1 C2
]
By omitting the states and dynamics associated withx2(t), we obtain
the low-order system
Gr =
p(t) = A11p(t)+B1u(t), p(0) = p0
q(t) = C1p(t)+Du(t)
Therth-order truncation of the realization(A,B,C,D) is given by
Tr(A,B,C,D) = (A11,B1,C1,D)
115
Properties of model truncation:
• The truncated system may be unstable even if the full-order
system is stable.
• The truncated system realization may be nonminimal even if the
full-order system realization is minimal.
• All reduced-order models obtained by truncation match the
full-order model at∞, i.e.,Gr(∞) = G(∞) = D.
• The steady-state error associated with state-space truncation is
G(0)−Gr(0) =CA−1B−C1A−111 B1
• The truncation error is
G(s)−Gr(s) = C(s)(sI− A(s))−1B(s)
whereA(s) = A22+A21(sI−A11)−1A12,
B(s) = B2+A21(sI−A11)−1B1, C(s) =C2+C1(sI−A11)
−1A12.
116
2. Singular perturbation approximation (SPA) .The state-space truncation does not retain the steady-state error, so itis sometimes not acceptable in applications. We can use singularperturbation approximation to improve the low-frequencycharacteristics.
If x2(t) represents the fast dynamics of the system, we mayapproximate the low-frequency behavior by setting ˙x(t) = 0. Thisgives
0= A21x1(t)+A22x2(t)+B2u(t)
SupposeA22 is nonsingular. Eliminatingx2(t), we have
Gr =
p(t) = (A11−A12A−122 A21)p(t)+(B1−A12A
−122 B2)u(t)
q(t) = (C1−C2A−122 A21)p(t)+(D−C2A−1
22 B2)u(t)
Therth-order singular perturbation approximation is given by
Sr(A,B,C,D) = (A11, B1,C1, D)
117
where
A11 = A11−A12A−122 A21, B1 = B1−A12A
−122 B2
C1 =C1−C2A−122 A21, D = D−C2A−1
22 B2
Singular perturbation approximation is equivalent to truncation for
the plantG(1s). That is, if we setH(s) = G(1
s), and performing a
state-space truncation ofH(s) to obtainHr(s), then the SPA is
Sr(G) = Hr(1s).
Since the singular perturbation and truncation operationsare related in a
straight-forward way, it suffices to develop all the theoretical results for
state-space truncation. When the low-frequency is important, the singular
perturbation approximation is the method of choice. Conversely, direct
truncation should be preferred when good high-frequency modelling is
the central concern.
Related MATLAB Commands:strunc, sresid
118
5.2 Balanced Realization
State-space truncation can be used to reduce a model. However, we
cannot do it with any state-space realization, because truncation errorcannot be guaranteed. We need to transform a realization to somestandard form. For example, we can put theA-matrix in Jordan canonicalform, then we have the classical modal truncation (dominated pole)method. The most used method is to put the realization to abalanced
form.
1. Motivation for balanced realization.
Given a modelG∈ RH∞ with a state-space realization
x = Ax+Bu
y = Cx+Du
Suppose a reduced-order model isGr ∈H∞. A natural criterion with
119
which to measure the absolute error is
‖G−Gr‖∞ = supu∈L2
‖y−yr‖2
‖u‖2
It is aL2-induced norm, so for the error to be small, we should deletethose components of the state-vectorx that are at least involved in theenergy transfer from the inputu to the outputy. This observationleads us to consider two closely related questions:
(1) What is the output energy resulting from a given initial statex(0) = x0?
(2) What is the minimum input energy required to bring the statefrom zero to the given initial statex(0) = x0?
The solutions are well known:
(1) Supposex(0) = x0 is given and thatu(t) = 0. TheL2[0,∞) normof y is given by‖y‖2
2 = xT0 Qx0, in whichQ is the observability
gramian.
120
(2) Consider the LQ problem
minu∈L2(−∞,0]
∫ 0
−∞uT(t)u(t)dt
subject to ˙x= Ax+Buwith x(0) = x0. Defineτ =−t, p(τ) = x(t)
andv(τ) = u(t), an equivalent problem is
minv∈L2[0,∞)
∫ ∞
0vT(τ)v(τ)dτ
subject to ˙p(τ) =−Ap(τ)−Bv(τ) with p(0) = x0. By LQ theory,
the optimal control isu(t) = BTP−1x(t) whereP is the
controllability gramian, and
minu∈L2(−∞,0],x(0)=x0
∫ 0
−∞uT(t)u(t)dt = xT
0 P−1x0
121
Combining the two solutions we get
maxu∈L2(−∞,0],x(0)=x0
∫ ∞0 yT(t)y(t)dt∫ 0−∞ uT(t)u(t)dt
=xT
0 Qx0
xT0 P−1x0
=αTP
12 QP
12 α
αTα
wherex0 = P12 α.
These calculation suggests that in order to keep‖G−Gr‖∞ small, the
state-space for the truncated system should be the space spanned by
the eigenvectors corresponding to the larger eigenvalues of P12 QP
12 .
That is, we should truncate a realization in whichP12 QP
12 is diagonal,
with the eigenvalues ordered in descending order.
122
2. Balanced realization.The realization withP
12 QP
12 diagonal is known as a balanced
realization. It always exists for a stable minimal realization.
Definition. A realization(A,B,C) is balancedif A is asymptotically
stable and the controllability and observability gramiansare equal
and diagonal. That is
AΣ+ΣAT +BBT = 0
ATΣ+ΣA+CTC= 0
in which
Σ =
σ1Ir1 0 · · · 0
0 σ2Ir2 · · · 0...
......
...
0 0 · · · σmIrm
,σ1 > σ2 > · · ·> σm > 0
123
The valueσi ’s are called theHankel singular valuesof (A,B,C).
Remarks:
• For a balanced realization, the basis for the state space is equallycontrollable and observable, with its “degree” of controllabilityand observability given by the corresponding diagonal entry of Σ.
• Suppose(A,B,C) is a balanced realization and the initialx0 ispartitioned accordingly asΣ, then
maxu∈L2(−∞,0],x(0)=x0
∫ ∞0 yT(t)y(t)dt∫ 0−∞ uT(t)u(t)dt
=m
∑i=1
σ2i xT
i xi
This shows thatσ2i is a measure of the extent to which the
correspondingr i dimensional subspace of the state space isinvolved in the transfer of energy from past inputs to futureoutputs.
• A given realization(A,B,C) can be transformed to a balancedrealization if and only if it is stable and minimal.
124
The state transformation matrixT can be obtained by:
(1) Find the controllability and observability gramiansP andQ.
(2) Perform a Cholesky factorization ofP:
P= RRT
(3) Perform a singular value factorization ofRTQR:
RTQR=UΣ2UT
(4) The transformation matrix is
T = Σ12UTR−1
The balanced realization is(TAT−1,TB,CT−1), with theobservability and controllability gramians
TPT∗ = (T−1)∗QT−1 = Σ
Related MATLAB Command:sysbal
125
5.3 Model Reduction by Balanced Truncation
Suppose(A,B,C) is a balanced realization ofG. PartitionΣ as
Σ =
Σ1 0
0 Σ2
with
Σ1 = diag{σ1Ir1, · · · ,σl Ir l },Σ2 = diag{σl+1Ir1+1, · · · ,σmIrm}
If (A,B,C) is partitioned conformably withΣ, we can obtain areduced-order modelGr = (A11,B1,C1,D), with r = r1+ . . .+ r l bystate-space truncation. We have
(1) (A11,B1,C1) is also a balanced realization, with the controllabilityand observability gramians equal toΣ1. SoA11 is stable and(A11,B1,C1) is minimal.
126
(2) The error bound is
‖G−Gr‖∞ ≤ 2(σl+1+ . . .+σm)
If we want to retain the steady-state performance, then we need to use
SPA to truncate(A,B,C). The error bound is the same as that using
state-space truncation.
For example, consider a 5th-order system
G(s) =1
(s+1)5
The Hankel singular values ofG(s) is
0.7292,0.2826,0.0601,0.0069,0.0003
The last three are small compared with the first two. So we can reduce the
model to order 2, with an error less than 0.1347.
127
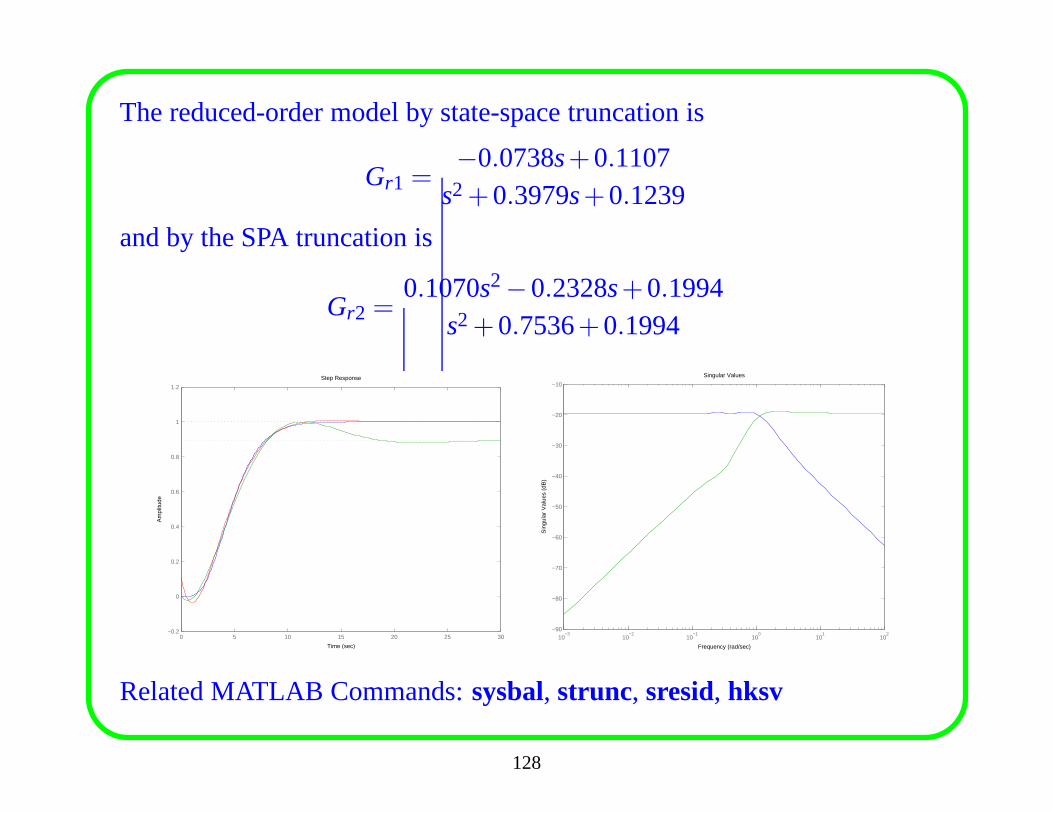
The reduced-order model by state-space truncation is
Gr1 =−0.0738s+0.1107
s2+0.3979s+0.1239
and by the SPA truncation is
Gr2 =0.1070s2−0.2328s+0.1994
s2+0.7536+0.1994
Step Response
Time (sec)
Am
plitu
de
0 5 10 15 20 25 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Singular Values
Frequency (rad/sec)
Sin
gula
r V
alue
s (d
B)
10−3
10−2
10−1
100
101
102
−90
−80
−70
−60
−50
−40
−30
−20
−10
Related MATLAB Commands:sysbal, strunc, sresid, hksv
128
5.4 Optimal Model Reduction
The motivation for the balanced truncation method of model reduction
comes from energy transmission arguments. If a high-order modelG
mapsu to y via y= Gu, then the idea is to select a low-order modelGr ,
which mapsu to yr , such that
e= supu∈L2(−∞,0]
(∫ ∞0 (y−yr)
T(y−yr)dt∫ 0−∞ uTudt
)
is small whenu(t) = 0 for t > 0. The quantity can be thought of as the
energy gain from past inputs to future outputs.
The balanced realization method guarantees that the gain issmall. It is
preferred if we can make it minimum. Thus we have the optimal Hankel
norm approximation.
129
Hankel Operators
TheHankel operator of a linear system is the prediction operator thatmaps past inputs to future outputs, assuming the future input is zero.
Suppose the systemG∈ RH∞ is defined by the minimal state-spacerealization
x = Ax+By, x(−∞) = 0
y = Cx+Du
If u∈ L2(−∞,0], then future outputs are determined by
y(t) =∫ 0
−∞CeA(t−τ)Bu(τ)dτ , t > 0
If we setv(t) = u(−t), theny(t) = (ΓGv)(t) for t > 0, whereΓG : L2[0,∞) 7→ L2[0,∞) is the Hankel operator:
(ΓGv)(t) :=∫ ∞
0CeA(t+τ)Bv(τ)dτ
130
Hankel Norm
TheHankel norm of a system is theL2[0,∞) induced norm of its
associated Hankel operator.
‖G‖H = ‖ΓG‖=(
supu∈L2(−∞,0]
( ∫ ∞0 yTydt∫ 0−∞ uTudt
)) 12
For a givenx(0) = x0, we have (c.f. section 13.2)
supu∈L2(−∞,0],x(0)=x0
( ∫ ∞0 yTydt∫ 0−∞ uTudt
)
=xT
0 Qx0
xT0 P−1x0
Thus
‖G‖2H = sup
x0
xT0 Qx0
xT0 P−1x0
= λmax(PQ) = σ21 (largest Hankel singular value)
131
Remarks:
(1) The Hankel norm of a system is a measure of the effect of itspast
input on its future output, or the amount of energy that can bestored
in and then retrieved from the system.
(2) The Hankel singular values of a system are, in fact, the singular
values of its Hankel operator. They can be obtained by
σi(ΓG) = λ12
i (PQ)
The Hankel norm equals the largest Hankel singular value.
(3) ‖G‖H ≤ ‖G‖∞, since for an arbitrary unit energy input inL2(−∞,0],
‖G‖2H is the least upper bound on the energy of thefuture output,
while ‖G‖2∞ is the least upper bound on the energy of thetotal output.
132
(4) For any anticausal systemF, if u∈ L2(−∞,0], then(Fu)(t) is zero
for t > 0. Thus the future output is unaffected by an addition of any
anticausalF and it is immediate that
‖G‖H ≤ ‖G−F‖∞
is satisfied for any anticausalF. In fact, sinceF ∈H−∞ impliesF is
anticausal, we have
‖G‖H = minF∈H−
∞‖G−F‖∞
which is referred to as Nehari’s theorem.
133
Optimal Hankel Norm Model Reduction
The optimal Hankel norm model reduction problem is:Given a full-order
model G(s), find a low-order model Gr such that
infdeg(Gr )<r
‖G−Gr‖H
The error is now in the sense of Hankel norm rather thanL∞ norm.
The optimum of the problem is
infdeg(Gr )<r
‖G−Gr‖H = σr+1
For the optimal Hankel norm approximationGr , the error in theL∞ norm
is
‖G−Gr‖∞ ≤ (σr+1+ . . .+σm)
so it is just half of the bound for balanced truncation method.
134
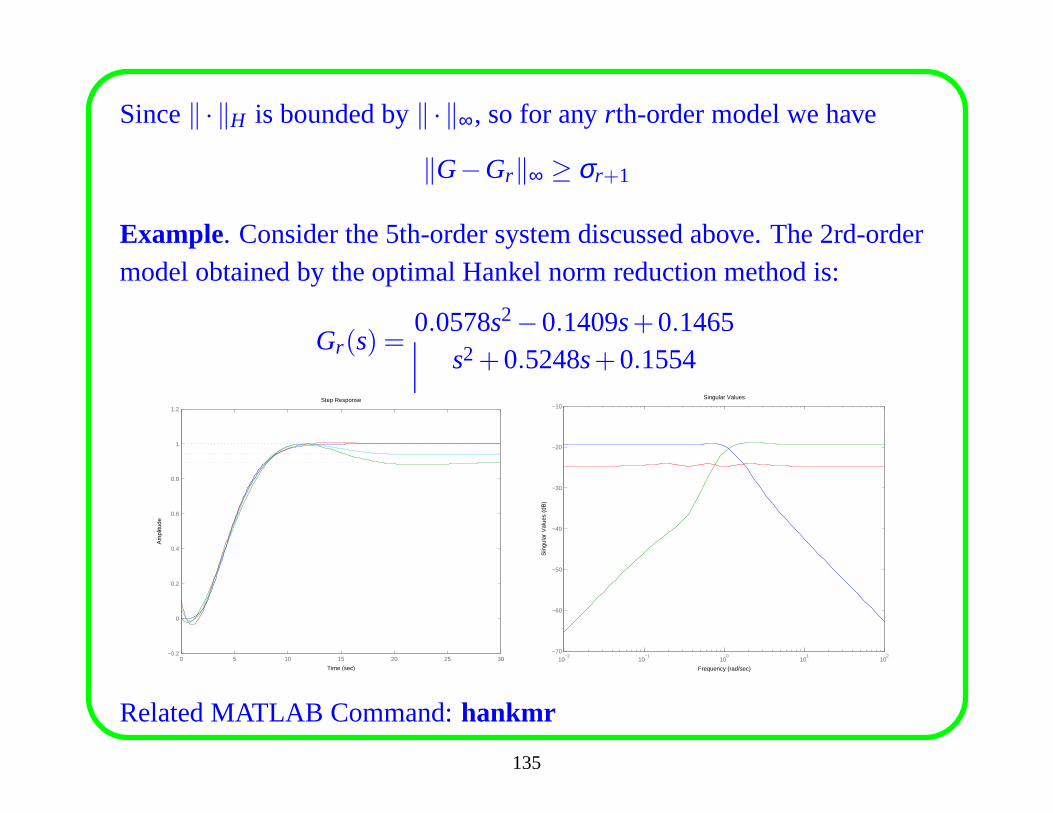
Since‖ · ‖H is bounded by‖ · ‖∞, so for anyrth-order model we have
‖G−Gr‖∞ ≥ σr+1
Example. Consider the 5th-order system discussed above. The 2rd-ordermodel obtained by the optimal Hankel norm reduction method is:
Gr(s) =0.0578s2−0.1409s+0.1465
s2+0.5248s+0.1554Step Response
Time (sec)
Am
plitu
de
0 5 10 15 20 25 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Singular Values
Frequency (rad/sec)
Sin
gula
r V
alue
s (d
B)
10−2
10−1
100
101
102
−70
−60
−50
−40
−30
−20
−10
Related MATLAB Command:hankmr
135
5.5 Coprime Factorization Reduction
Another method for model/controller reduction is to use thecoprime
factorization of a model. Suppose an nlcf of a plantG is G= M−1N.
If we reduce the ‘numerator’ and the ‘denominator’ of the model
simultaneously tor-th order,Mr , Nr , thenGr := M−1r Nr appears to be a
‘close’ approximation toG.
To show that, let
D(s) :=
M
N
, Dr(s) :=
Mr
Nr
Consider the approximation ofD(s) by Dr(s). Suppose there exists a
Q(s) ∈ RH∞ such that
Dr(s) = D(s)Q(s)
136
then the approximation error‖D(s)−Dr(s)‖∞ < γ means∥∥∥∥∥∥
M
N
−
M
N
Q
∥∥∥∥∥∥
∞
< γ
soGr belongs to
{(M+∆M)−1(N+∆N) : ‖[ ∆M ∆N ]‖∞ ≤ γ}
Thus if γ is small, thenGr is close toG in the coprime factorization sense
(gap metric). Thus we can use normalized coprime factorization to
perform a model reduction, where the approximation ofD(s) by Dr(s)
can be done either using balanced truncation or optimal Hankel reduction
method.
137
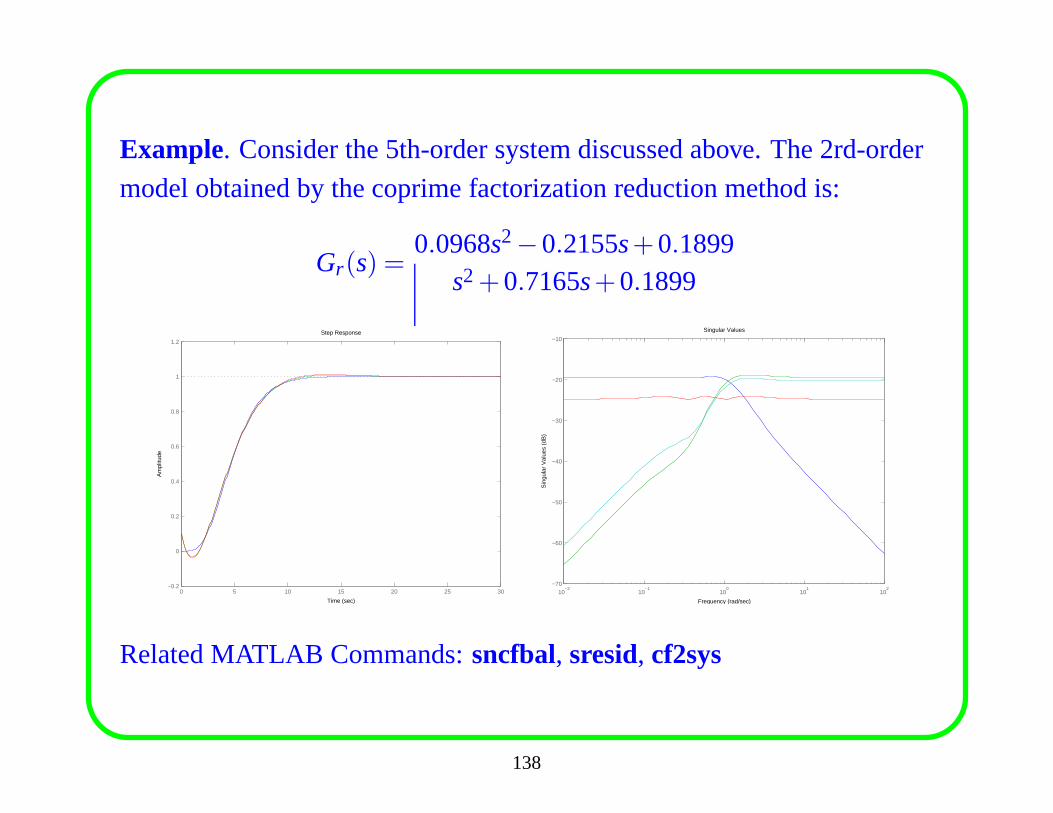
Example. Consider the 5th-order system discussed above. The 2rd-order
model obtained by the coprime factorization reduction method is:
Gr(s) =0.0968s2−0.2155s+0.1899
s2+0.7165s+0.1899
Step Response
Time (sec)
Am
plitu
de
0 5 10 15 20 25 30−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Singular Values
Frequency (rad/sec)
Sin
gula
r V
alue
s (d
B)
10−2
10−1
100
101
102
−70
−60
−50
−40
−30
−20
−10
Related MATLAB Commands:sncfbal, sresid, cf2sys
138
Summary
• The balanced truncation method and the optimal Hankel method are
not applicable to unstable models. If a model contains unstable poles,
we need first decompose it into a stable part and an unstable part. The
order can only be reduced for the stable part. The final reduced-order
model is then obtained by adding the unstable part and the
reduced-order stable part.
• The coprime factorization reduction method can be applied to both
stable and unstable models, so there is no need to have a
decomposition first.
• The coprime factorization reduction method makes sense in the gap
metric. It does not guarantee a bound for the error in the infinity
norm.
139
5.6 PID Approximation
About 90% of industrial controllers are of PID-type. So it isuseful if the
high-order controllers can be reduced to PID control structure. Two
methods can be used to make the approximation:
1. In the state-space domain.
2. In the frequency-domain.
140
PID Approximation in Time-Domain
Consider a controllerK(s), given by a state-space realization of the form
x= Akx+Bky
u=Ckx+Dky
Find a similarity transformationT such that
TAkT−1 =
0 0
0 A2
This transformation can be computed using the eigenvalue decompositionof Ak. With thisT, the new state-space realization is given by
˙x= Akx+ Bky,
u= Ckx+ Dky,
141
with Ak = TAkT−1, Dk = Dk, and
Ck =CkT−1 =
[
C1 C2
]
, Bk = TBk =
B1
B2
A PID approximation of the form
KPID(s) = Kp+Ki/s+Kds
can now be obtained by truncating the Maclaurin expansion ofthecontroller with respect to the variables:
K(s) =[
C1 C2
]
sI 0
0 sI−A2
−1
B1
B2
+Dk
= C1B1s +(Dk−C2A−1
2 B2)−C2A−22 B2s+ · · · ,
So we have
Kp = Dk−C2A−12 B2, Ki =C1B1, Kd =−C2A−2
2 B2.
142
It is then clear that the resulting PID controller achieves good
approximation at low frequencies, especially the integralaction, so we
can expect that the resulting PID controller will retain thedisturbance
rejection performance of the high-order controller.
The following steps need to be considered after the reduction procedure:
1. Due to the minimum-phase requirement of a PID controller,the signs
of the proportional gain, the integral gain and the differentiator
should be the same. So if the corresponding elements ofKp, Ki and
Kd do not have the same sign, then we need to discard the term that
has the opposite sign with the element inKi , which is the most
important term.
143
2. The derivative action should be taken with care. We find that a PID
approximation with ideal differentiators sometimes destabilizes a
process even though the original high-order controller works well.
This seldom happens for single-loop processes, but it is quite
common for multivariable processes. We believe the reason is that
the phase information of the original controller is lost when using an
ideal differentiator. Thus, a filter of the form1αs+1 should be used for
the differentiator.
144
PID Approximation in Frequency Domain
The standard procedure for obtaining PID parameters from IMCcontrollers is to expand the final controller into MacLaurian series and getthe coefficients of the first three terms. However, the procedure is notconvenient and sometimes not sufficient.
One-point Approximation
A new method to approximate any high-order controller with PID in thefrequency domain with one point approximation goes as follows:
1. Given any controllerK(s), get a frequency range of interest, computethe frequency response ofK(s).
2. Find the frequencyωz such that the magnitude ofK( jω) achieves itsminimum value.
145
3. Then the approximated PID is
KPID(s) = Kp+Ki
s+Kds
with
Ki = |K( jωs)|ωs
Kp = Re(Kwz)
Kd = Im(Kwz)/ωz
whereωs is any frequency that is small (sayωs = 0.001), and
Kwz= K( jωz)−Ki/( jωz)
146
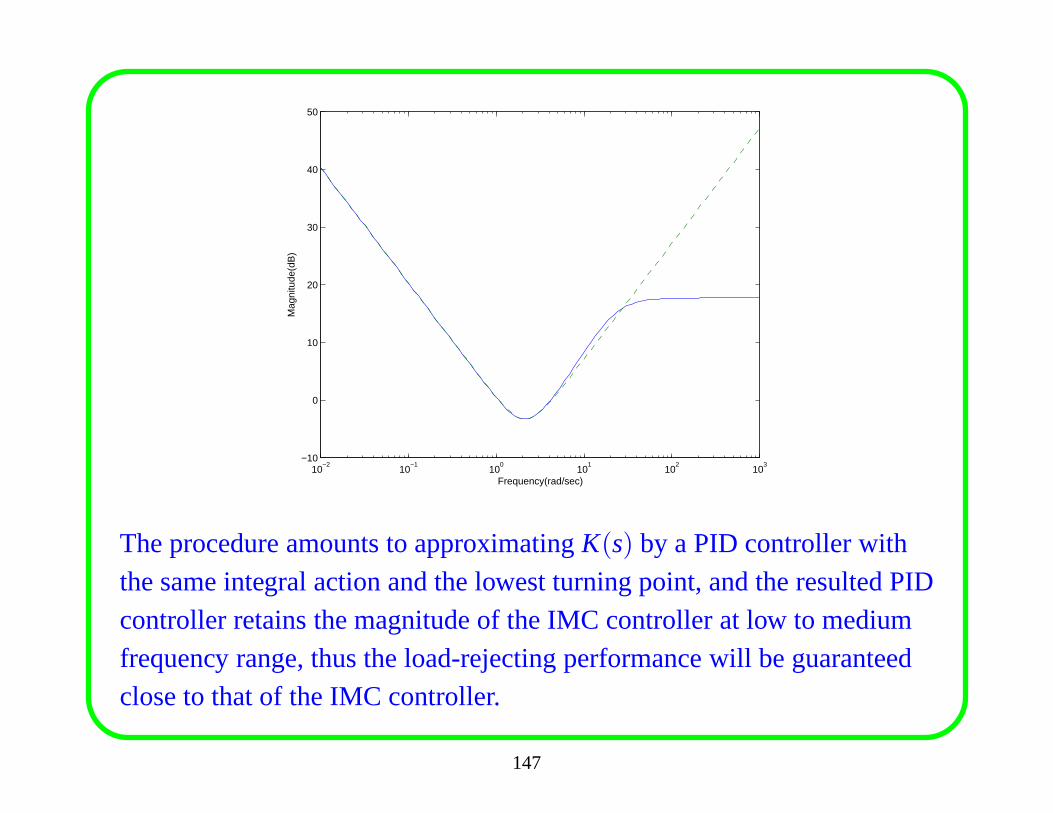
10−2
10−1
100
101
102
103
−10
0
10
20
30
40
50
Frequency(rad/sec)
Mag
nitu
de(d
B)
The procedure amounts to approximatingK(s) by a PID controller withthe same integral action and the lowest turning point, and the resulted PIDcontroller retains the magnitude of the IMC controller at low to mediumfrequency range, thus the load-rejecting performance willbe guaranteedclose to that of the IMC controller.
147
From the design practice, it is noted that the above approximation
procedure works well for stable processes, however, for lightly-damped
and unstable processes, an additional lead compensator maybe needed to
cascade with the PID controller to retain the performance ofthe
high-order controller, i.e., the final controller should bein the form
KPIDm(s) = (Kp+Ki
s+Kds)
αs+1βs+1
The parameters of the lead compensatorαs+1βs+1 are determined by
approximating the phase of theKPIDm(s) with that of the original
controller at a certain frequency.
148
The procedure to determineα andβ goes as follows (continue from the
above procedure):
4) Find the frequencyωp such that the phase ofK( jω) achieves its
maximum value.
5) Let
φm = ∠K( jωp)−∠KPID( jωp)
Soφm is the phase advance between the original controller and the
approximated PID controller atωp.
6) If φm < 0, then it is not necessary to add the lead compensator (i.e.,
α = 0,β = 0); Otherwise, let
a=1+sin(φm)
1−sin(φm)
149
and set
β =1
ωp√
a
α = aβ
The procedure is just a modification of the design of a lead compensator
in frequency domain in classical control theory, which can be found in
any undergraduate textbook.
The Bode plot of a TDF-IMC controller for a lightly-damped, unstable
plant and its PID approximations by the above procedure are shown
below.
150
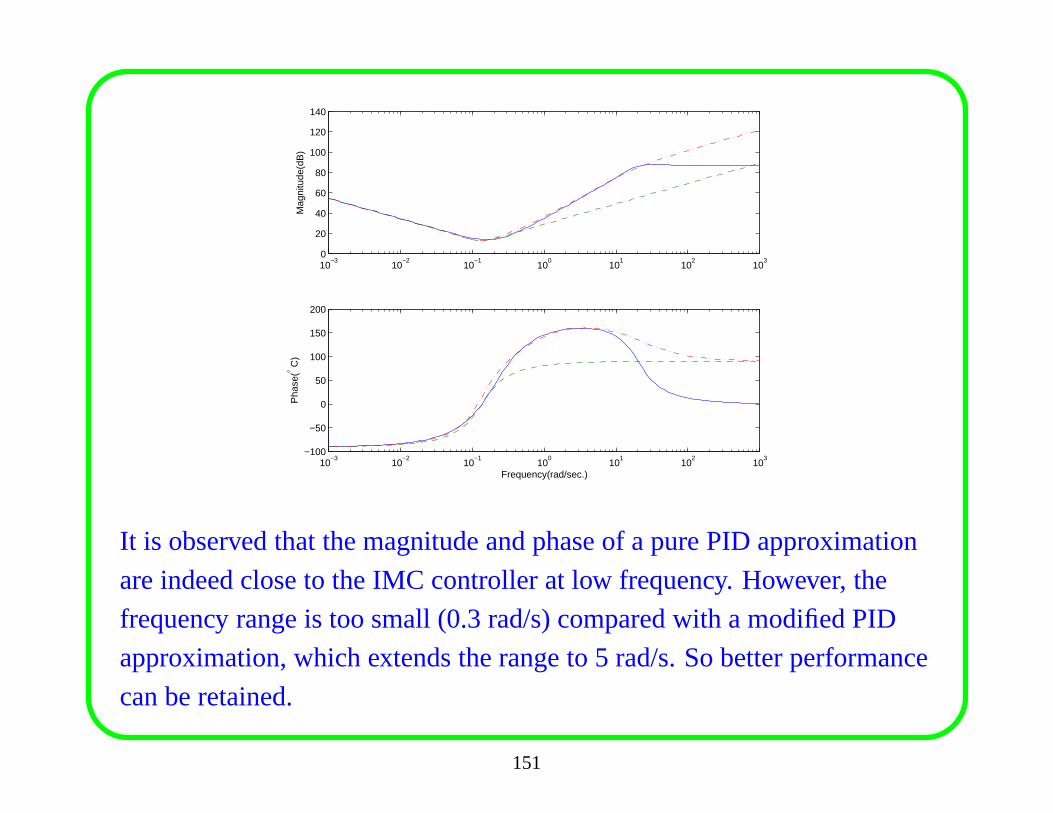
10−3
10−2
10−1
100
101
102
103
0
20
40
60
80
100
120
140
Mag
nitu
de(d
B)
10−3
10−2
10−1
100
101
102
103
−100
−50
0
50
100
150
200
Frequency(rad/sec.)
Pha
se(° C
)
It is observed that the magnitude and phase of a pure PID approximation
are indeed close to the IMC controller at low frequency. However, the
frequency range is too small (0.3 rad/s) compared with a modified PID
approximation, which extends the range to 5 rad/s. So betterperformance
can be retained.
151
Multiple-point Approximation
Given a range of frequencyωi (i = 1, · · · ,m), suppose we want to use the
following nth-order transfer function to approximateK( jωi),
K(s) =ansn+an−1sn−1+ · · ·+a1s+a0
bnsn+bn−1sn−1+ · · ·+b1s+1
then ideally the following equations should be satisfied:
an( jωi)n+an−1( jωi)
n−1+ · · ·+a1( jωi)+a0
bn( jωi)n+bn−1( jωi)n−1+ · · ·+b1( jωi)+1= K( jωi), i = 1, · · · ,m
Define
x=[
an · · · a1 a0 bn · · · b1
]T
b=[
K( jω1) · · · K( jωm)]T
152
Θ=
( jω1)n · · · ( jω1) 1 −K( jω1)( jω1)
n · · · −K( jω1)( jω1)...
......
......
......
( jωm)n · · · ( jωm) 1 −K( jωm)( jωm)
n · · · −K( jωm)( jωm)
So the equations become
Θx= b
To make sure the solutionx is real, we define
A=[
Real(Θ) Imag(Θ)]
,z=[
Real(b) Imag(b)]
where Real (Imag) denotes the real (imaginary) part of a matrix. So we
have
Ax= z
A least-squared solution can be found.
153
It is observed that the least-squared solution may not be positive, so the
positiveness constraint is added and the problem becomes
minx>0
(Ax−z)T(Ax−z)
A standard quadratic programming algorithm can be used to solve it
efficiently.
154
Chapter 6. Robustness Measure
In this chapter a simple method will be proposed to measure system
robustness and performance. It is shown that the method can be applied to
various industrial processes, no matter they are stable, integrating, or
unstable; single-loop, cascade, or multivariable.
155
6.1 Classical Robustness Measures
6.1.1 Robustness Measure in terms ofMs
Gain and phase margins are generally used in the classical control theory
to measure system robustness for a single-input-single-output (SISO)
process. If the open-loop transfer function of a linear system is
L(s) := G(s)K(s), then the gain margin (GM) is
GM =1
|L( jωp)|
whereωp is the phase crossover frequency, and the phase margin (PM) is
PM= ∠L( jωg)−180◦
whereωg is the gain crossover frequency.
156
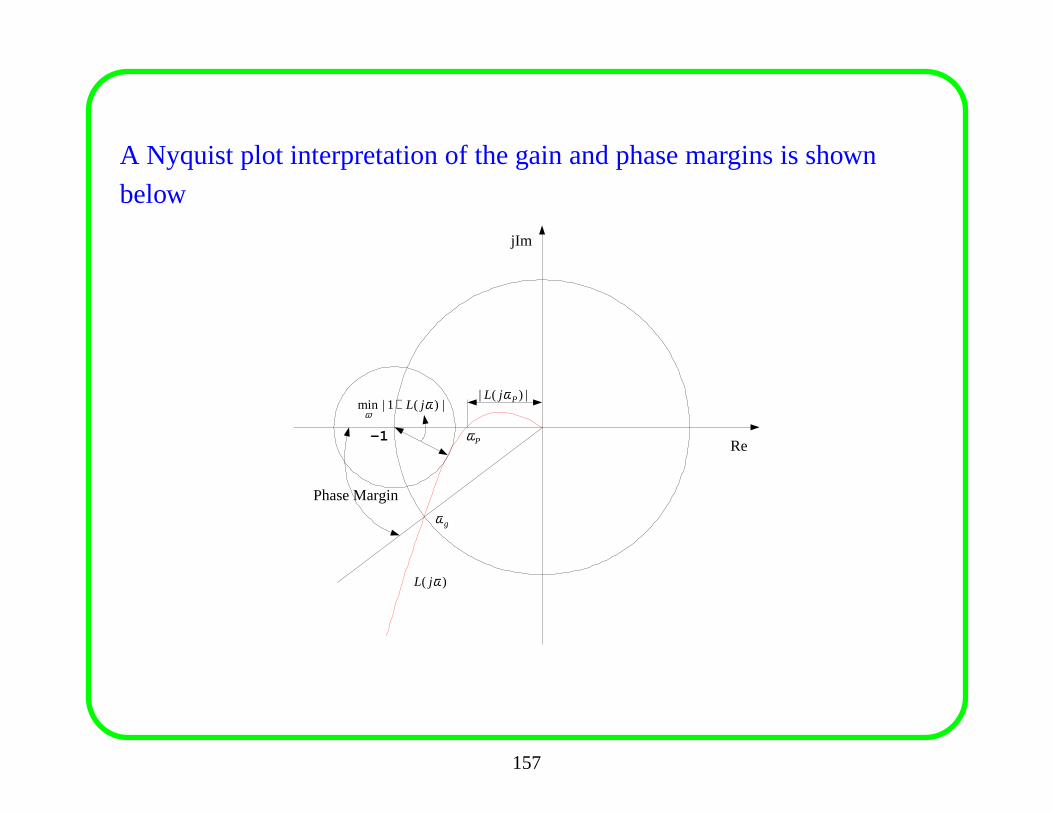
A Nyquist plot interpretation of the gain and phase margins is shown
below
-1
Phase Margin
gω
Pω
|)(| PjL ω
)( ωjL
|)(1|min ωω
jL+
Re
jIm
157
Clearly, GM and PM measure the distance from the Nyquist plotL( jω) to
the critical point(−1, j0) in two different viewpoints: GM indicates the
closeness of the intersection of the negative real axis by the Nyquist plot
of L( jω) to the(−1, j0) point; while PM indicates the distance with the
variation in phase. A more compact indicator would be
Ms := ‖S‖∞ = maxω
∣∣∣∣
11+L( jω)
∣∣∣∣=
1minω |1+L( jω)|
whereS= 11+GK is the sensitivity function. Thus 1/Ms is the minimal
distance fromL( jω) to the critical point.
Note that the peak ofSusually occurs at the low and mid-frequencies, so
Ms is a measure of system robustness against low and mid-frequency
uncertainty (e.g, gain variation).
158
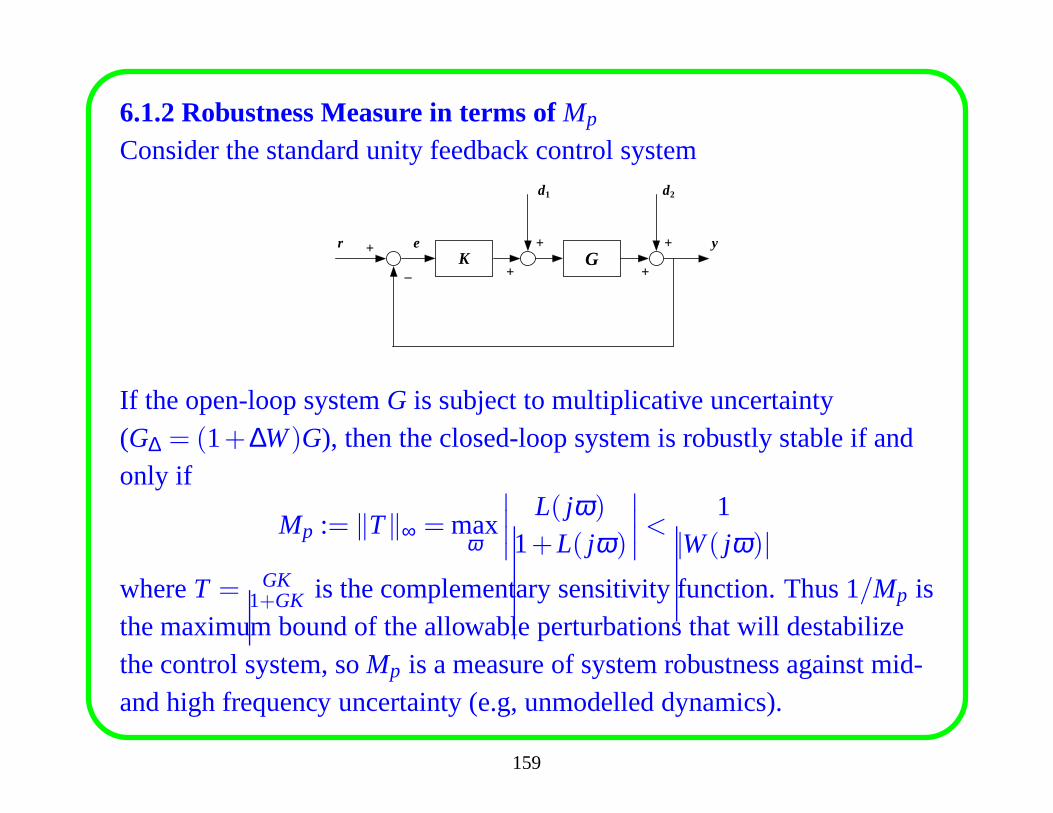
6.1.2 Robustness Measure in terms ofMp
Consider the standard unity feedback control system
K Gr y
_
e
d1
+
d2
+
+
+
+
If the open-loop systemG is subject to multiplicative uncertainty(G∆ = (1+∆W)G), then the closed-loop system is robustly stable if andonly if
Mp := ‖T‖∞ = maxω
∣∣∣∣
L( jω)
1+L( jω)
∣∣∣∣<
1|W( jω)|
whereT = GK1+GK is the complementary sensitivity function. Thus 1/Mp is
the maximum bound of the allowable perturbations that will destabilizethe control system, soMp is a measure of system robustness against mid-and high frequency uncertainty (e.g, unmodelled dynamics).
159
6.1.3 Robustness Measure in terms of Coprime FactorClearly, as measures of system robustness,Ms andMp alone are not
sufficient. A combination ofMs andMp seems more appropriate.
Furthermore, since uncertainty in a multivariable system may exhibit
directions, the case for robustness measure for a multivariable system is
more complex. To solve this problem, we can adopt the coprimefactor
uncertainty. Now the uncertain model is represented as:
G∆ = (M+∆M)−1(N+∆N)
whereG= M−1N is a left coprime factorization of the nominal plant
model, and the uncertainty structure is
∆ = [ ∆M ∆N ]
160
the closed-loop system is robustly stable if and only if
ε :=
∥∥∥∥∥∥
I
K
(I +GK)−1M−1
∥∥∥∥∥∥
∞
≤ 1
‖∆‖∞
So 1/ε measures the maximum bound of the allowable uncertainties thatwill destabilize the control system.
If the coprime factor is normalized, i.e.,
[ M N ][ M N ]∼ = I
then
ε =
∥∥∥∥∥∥
I
K
(I +GK)−1M−1[ M N ]
∥∥∥∥∥∥
∞
=
∥∥∥∥∥∥
I
K
(I +GK)−1[ I G ]
∥∥∥∥∥∥
∞
161
For a single loop control system, it is easy to show that
ε = ‖M‖∞ = ‖MT‖∞
=
∥∥∥∥∥∥
0 1
1 0
MT
0 1
1 0
∥∥∥∥∥∥
∞
=
∥∥∥∥∥∥
G
1
1
1+GK
[
−K 1]
∥∥∥∥∥∥
∞
whereM is given by
M :=
11+GK
G1+GK
− K1+GK − KG
1+GK
.
andMT denotes the transpose ofM.
162
The following example shows that sometimesε is not suited for
robustness measure.
Consider a high-order plant having a large roll-off rate at high frequencies
G=1
(s+1)5 ,
and a practical PID controller tuned by the Ziegler-Nicholsmethod
K = 1.7313(1+1
4.3240s+
1.0810s1.0810/10s+1
).
163
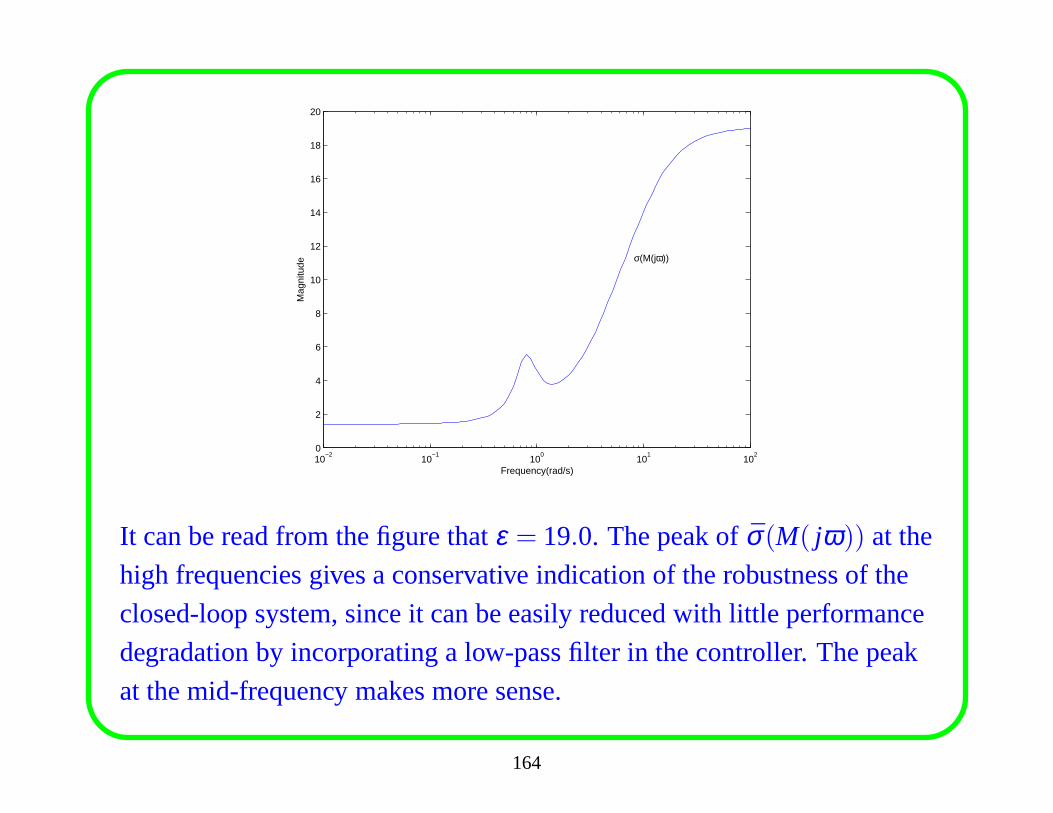
10−2
10−1
100
101
102
0
2
4
6
8
10
12
14
16
18
20
Frequency(rad/s)
Mag
nitu
de
σ(M(jω))
It can be read from the figure thatε = 19.0. The peak ofσ(M( jω)) at the
high frequencies gives a conservative indication of the robustness of the
closed-loop system, since it can be easily reduced with little performance
degradation by incorporating a low-pass filter in the controller. The peak
at the mid-frequency makes more sense.
164
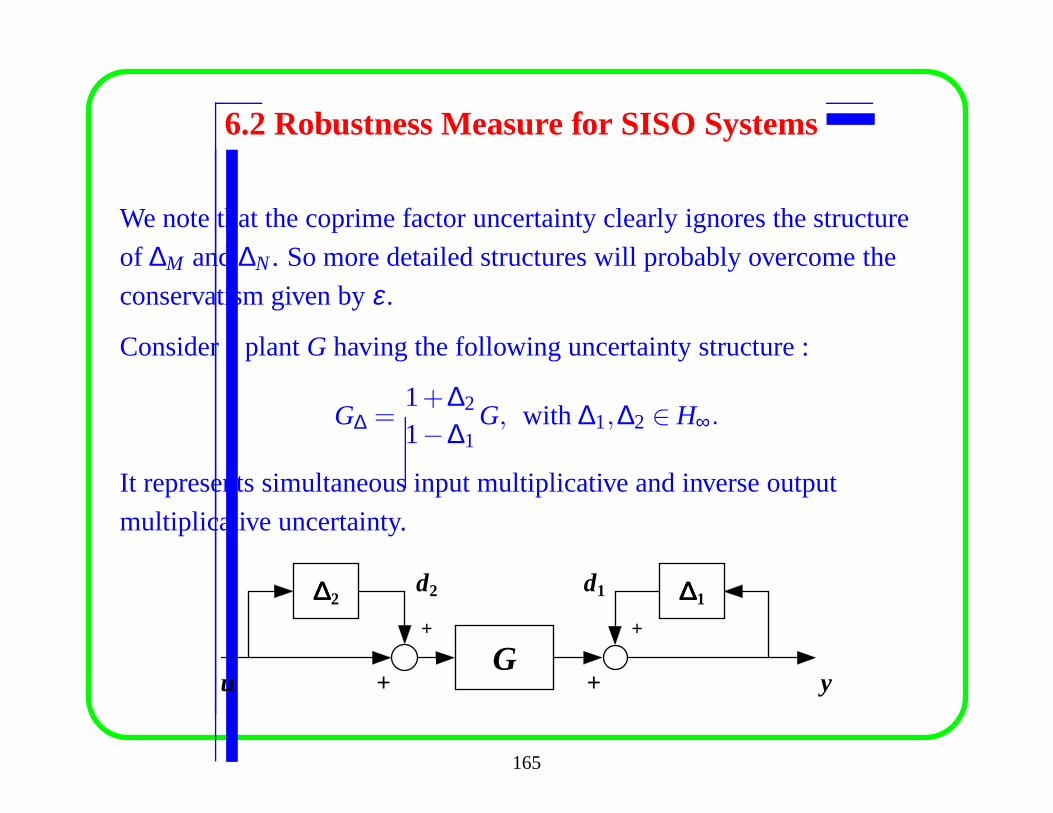
6.2 Robustness Measure for SISO Systems
We note that the coprime factor uncertainty clearly ignoresthe structure
of ∆M and∆N. So more detailed structures will probably overcome the
conservatism given byε .
Consider a plantG having the following uncertainty structure :
G∆ =1+∆2
1−∆1G, with ∆1,∆2 ∈ H∞.
It represents simultaneous input multiplicative and inverse output
multiplicative uncertainty.
∆∆∆∆2
G
∆∆∆∆1
+ +
d2 d1
u y+ +
165
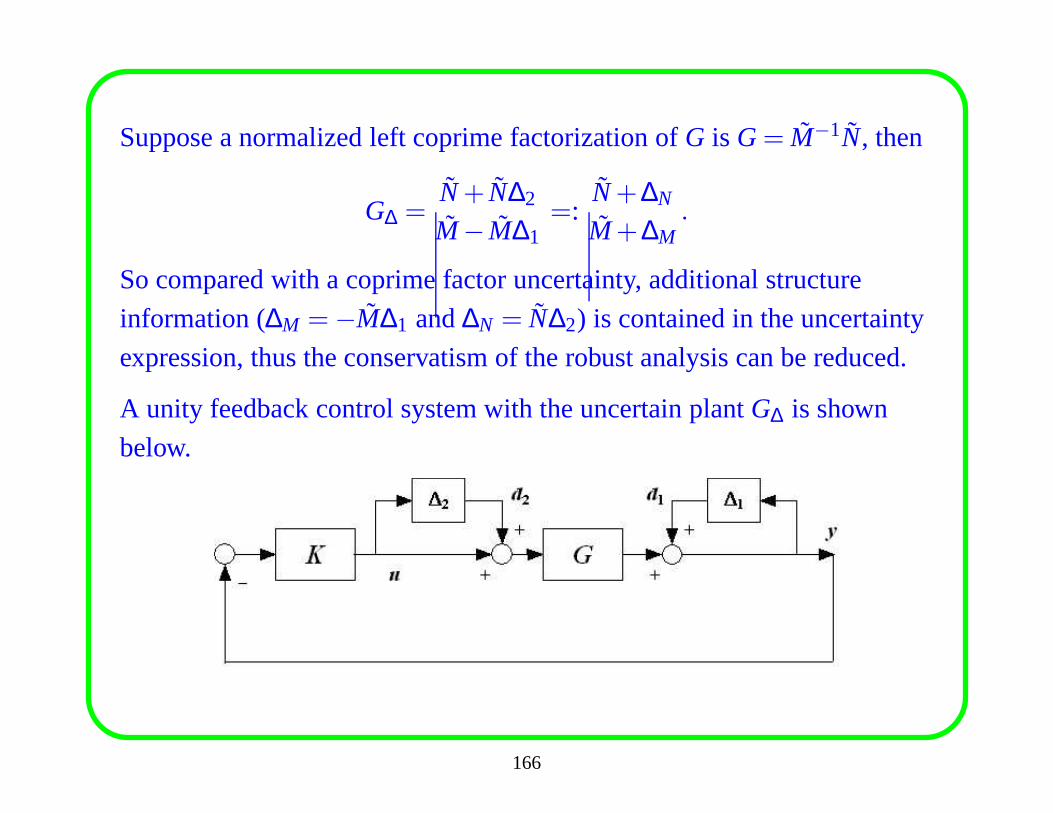
Suppose a normalized left coprime factorization ofG is G= M−1N, then
G∆ =N+ N∆2
M− M∆1=:
N+∆N
M+∆M.
So compared with a coprime factor uncertainty, additional structure
information (∆M =−M∆1 and∆N = N∆2) is contained in the uncertainty
expression, thus the conservatism of the robust analysis can be reduced.
A unity feedback control system with the uncertain plantG∆ is shown
below.
166
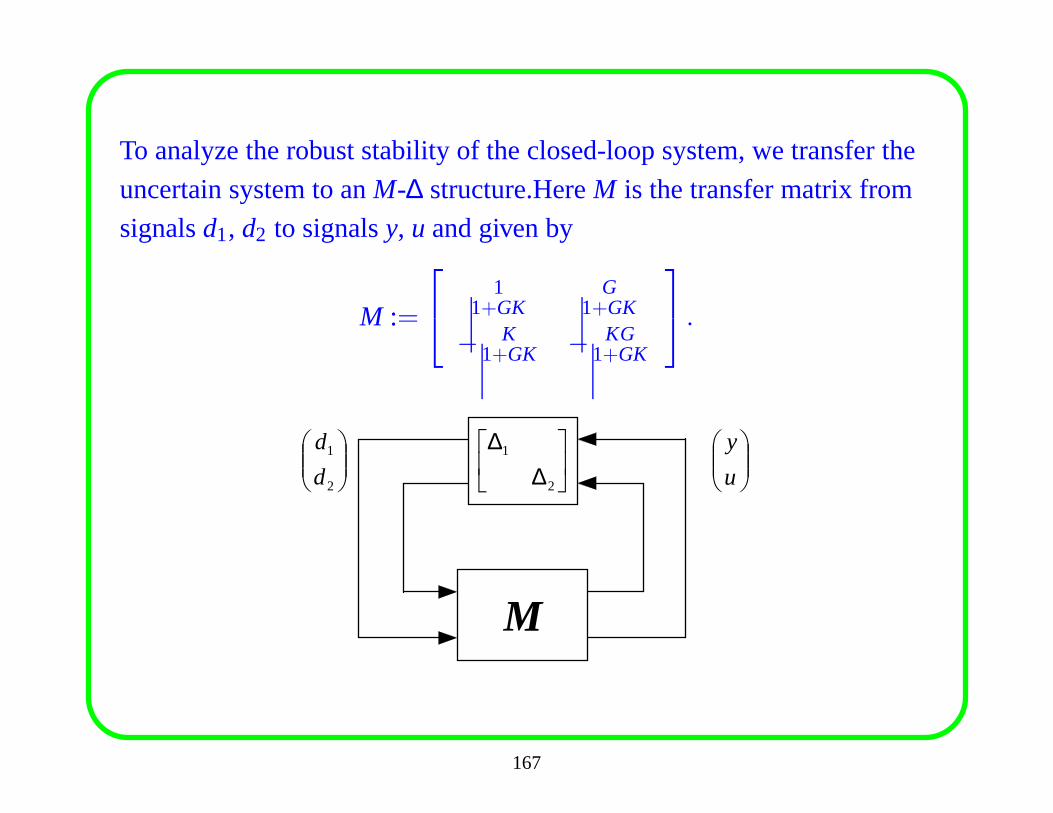
To analyze the robust stability of the closed-loop system, we transfer the
uncertain system to anM-∆ structure.HereM is the transfer matrix from
signalsd1, d2 to signalsy, u and given by
M :=
11+GK
G1+GK
− K1+GK − KG
1+GK
.
M
∆∆
2
1
2
1
d
d
u
y
167
Define
∆ :=
∆1 0
0 ∆2
.
By the smallµ theorem, the closed-loop system is robustly stable if and
only if
εm := µ∆(M)<1
‖∆‖∞
Thusµ∆(M) is a measure of system robustness.
168
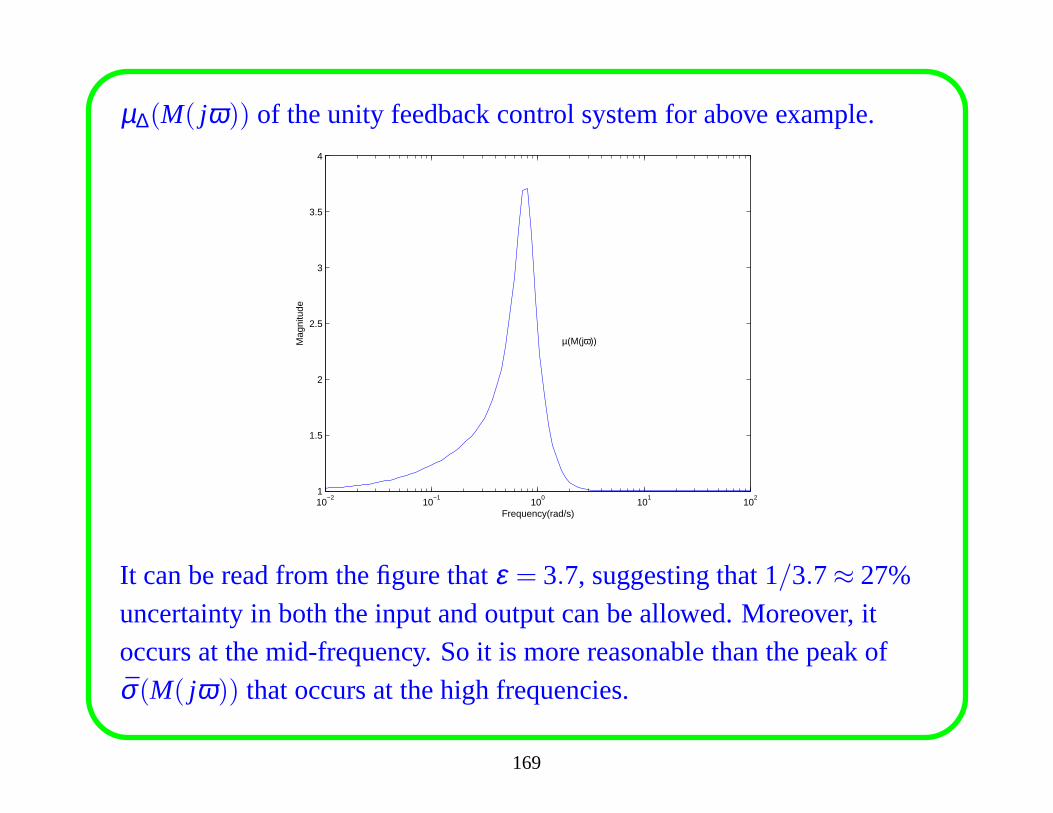
µ∆(M( jω)) of the unity feedback control system for above example.
10−2
10−1
100
101
102
1
1.5
2
2.5
3
3.5
4
Frequency(rad/s)
Mag
nitu
de
µ(M(jω))
It can be read from the figure thatε = 3.7, suggesting that 1/3.7≈ 27%uncertainty in both the input and output can be allowed. Moreover, itoccurs at the mid-frequency. So it is more reasonable than the peak ofσ(M( jω)) that occurs at the high frequencies.
169
We see that the additional structure information (∆M =−M∆1 and
∆N = N∆2) used in the proposed method leads the peak in the mid-range
frequencies, which is very important since simple methods can be used to
deal with the uncertainties at low and high frequencies. Furthermore, for
a single-loop system, we have
εm = µ∆
1
1+GK
1
−K
[ 1 G ]
= supω
1+ |GK||1+GK|
= supω(|S( jω)|+ |T( jω)|)
Compared withMs or Mp, the proposed measure is more appropriate
since it bounds bothMs andMp simultaneously.
170
Application: Comparison of PID tuning formulas
Evaluation of various PID design or tuning methods found in the
literature can be done by using some performance criteria. However,
since a specific method might be effective for a specific plantmodel, it is
hazardous to draw general conclusions on which method is thebest (in
fact, no best at all). What we can conclude is that some methods show
better performance in disturbance rejection and/or robustness than other
methods.
In this section, we will apply the criteria proposed in the previous section
to analyze several PID tuning techniques found in the literature.
171
The process model is first-order with deadtime (FOPDT)
G(s) =k
Ts+1e−τs.
The following PID tuning formulas are considered:
1. Ziegler-Nichols (Z-N) method
2. Internal model control (IMC) method.
3. Gain-phase margin (G-P) method.
4. Optimum integral error for load disturbance (IAE-load, ITAE-load,
ISE-load, ISTE-load), and for setpoint change (IAE-setpoint,
ITAE-setpoint, ISE-setpoint, ISTE-setpoint) methods.
172
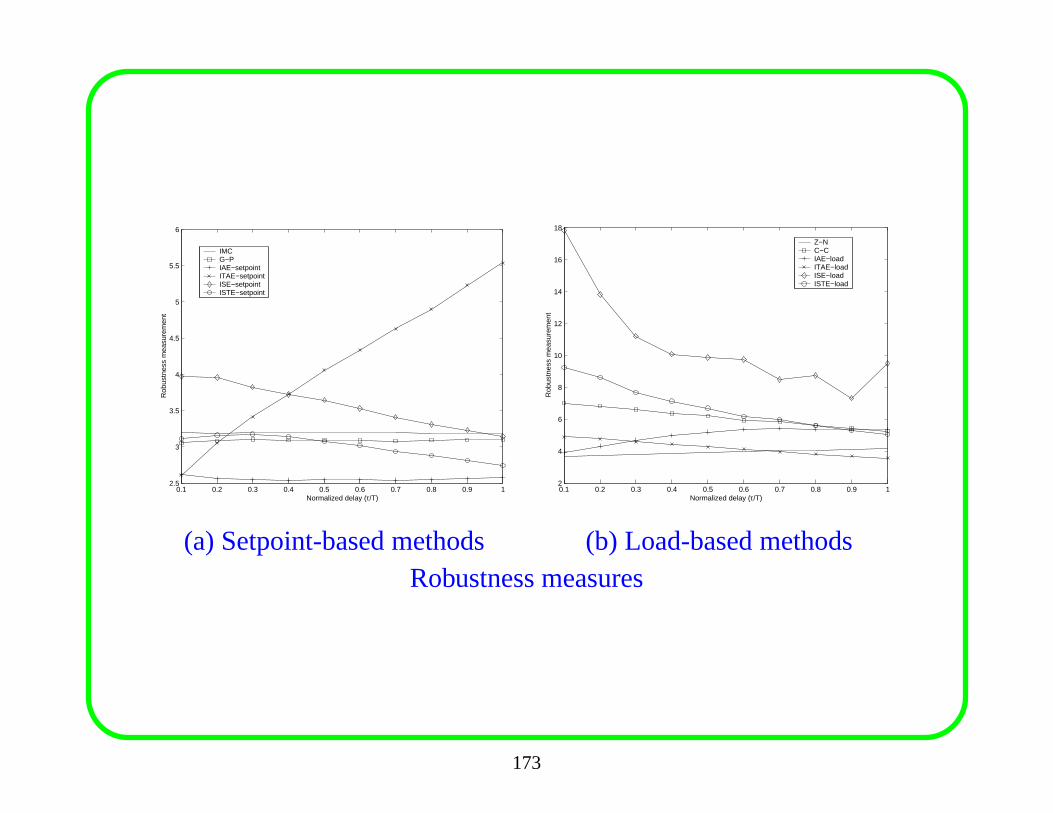
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12.5
3
3.5
4
4.5
5
5.5
6
Normalized delay (τ/T)
Rob
ustn
ess
mea
sure
men
t
IMCG−PIAE−setpointITAE−setpointISE−setpointISTE−setpoint
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
4
6
8
10
12
14
16
18
Normalized delay (τ/T)
Rob
ustn
ess
mea
sure
men
t
Z−NC−CIAE−loadITAE−loadISE−loadISTE−load
(a) Setpoint-based methods (b) Load-based methodsRobustness measures
173
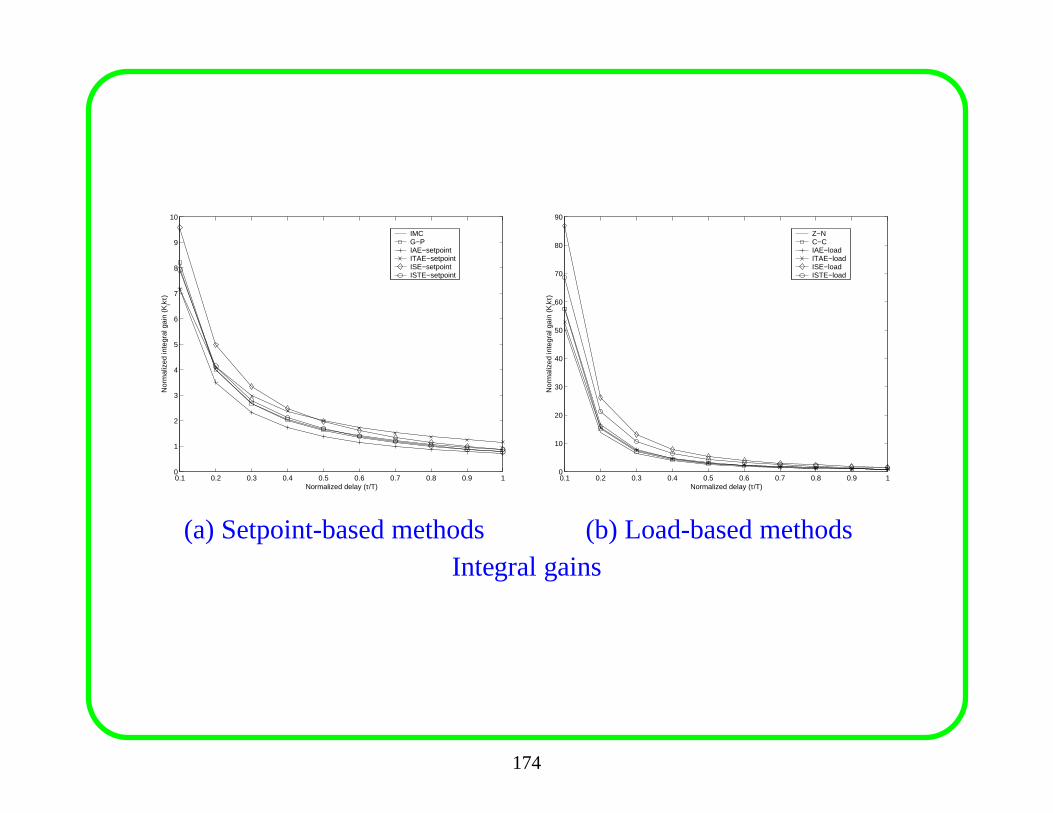
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5
6
7
8
9
10
Normalized delay (τ/T)
Nor
mal
ized
inte
gral
gai
n (K
ikτ)
IMCG−PIAE−setpointITAE−setpointISE−setpointISTE−setpoint
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
Normalized delay (τ/T)
Nor
mal
ized
inte
gral
gai
n (K
ikτ)
Z−NC−CIAE−loadITAE−loadISE−loadISTE−load
(a) Setpoint-based methods (b) Load-based methodsIntegral gains
174
The following can be observed:
1. IMC and G-P methods can be regarded as setpoint-based tuning
methods, since the integral gains of the PID controllers tuned by the
two methods are close to those of the setpoint-based optimum
integral error methods. Similarly Z-N and C-C methods can be
regarded as load-based tuning methods.
2. The robustness measures of the setpoint-based methods are less than
4 except the ITAE-setpoint method for processes with large delay;
while those for the load-based methods are greater than 4, except the
Z-N method for processes with small delay and the ITAE-load
method for processes with large delay. So the PID controllers tuned
by the setpoint-based methods are usually more robust than those
tuned by the load-based methods.
175
3. The PID controllers tuned by the setpoint-based methods for
processes with small delay have very small integral gains and thus
have sluggish load responses. On the other hand, the PID controllers
tuned by the load-based methods have very large integral gains but
are generally not robust.
4. All of these methods give similar integral gains for processes with
large delay, but the setpoint-based methods (except ITAE-setpoint)
have smaller robustness measures, so they are better than the
load-based methods for processes with large delay.
5. Among the load-based methods, only Z-N and ITAE-load methods
are acceptable. ISE-load, ISTE-load, IAE-load and C-C methods
should not be used since the PID controllers tuned by them aretoo
aggressive. The robustness of the PID controllers tuned by the Z-N
method become worse as the delay becomes larger, so it shouldonly
be used for processes with small delay.
176
6. Among the setpoint-based methods, IMC and G-P methods have
almost constant robustness measures, but the G-P method hassmaller
robustness measure and larger integral gain, so it is slightly better
than the IMC method. The IAE-setpoint method has the smallest
integral gains and the best robustness measures thus it is too
conservative. The ISE-setpoint method has larger integralthan IMC
and G-P methods with a sacrifice on robustness, and the
ISTE-setpoint method has smaller integral than IMC and G-P
methods with slightly larger robustness. Like the Z-N method, the
robustness of the PID controllers tuned by the ITAE-setpoint method
become worse as the delay becomes larger, so it should only beused
for processes with small delay, too.
177
7. Extensive simulations show that when the robustness measureεm is
larger than 5, then the closed-loop system will not have sufficiently
large robust margin. On the other hand, if it is less than 3, the integral
gain will not be sufficiently large. The best compromise for the
robustness measure is between 3 and 5, which amounts to an internal
or external disturbance of 20% to 33%.
178
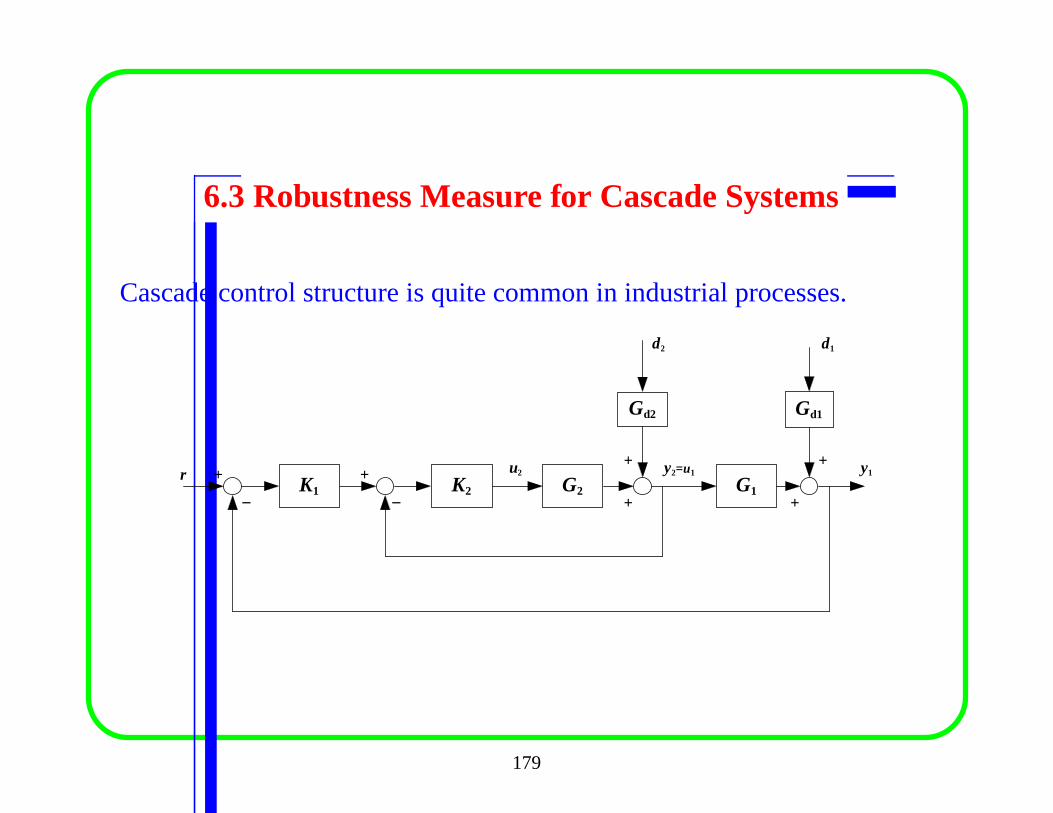
6.3 Robustness Measure for Cascade Systems
Cascade control structure is quite common in industrial processes.
K2 G2r y2=u1
_
Gd2
y1
d2
+
G1K1
Gd1
d1
u2+ +
+ +
+
_
179
The advantages of a cascade control compared with a conventional
single-loop feedback control can be summarized as follows:
1) Disturbances arising at the inner loop are corrected before they
influence the controlled variable, thus the performance of acascade
structure is better than a conventional feedback structurewith regard
to disturbance attenuation.
2) Parameter variations at the inner process can be corrected for within
its own loop. This property can be used to reduce the static
nonlinearity of the actuator.
3) If the inner loop has a faster response than the original inner process,
then the speed of the overall system response can be improved.
180
Design and tuning of a cascade controller are usually done insequence:
The inner loop is tuned first and then the outer loop is tuned with the inner
loop closed. Methods used in a conventional feedback structure have been
extended to the cascade structure.
Several problems exist in cascade controller tuning:
1) Interaction. In a cascade structure, the inner controller affects the
outer loop, and the outer controller also affects the inner loop. This
interaction makes the tuning of a cascade controller more challenging
than that of a conventional feedback controller. The sequential tuning
method clearly takes into consideration the effect of the inner
controller on the outer loop, but it neglects the outer controller’s
effect on the inner loop. This is undesirable since the innerloop is
very important in a cascade control.
181
2) Inner controller mode. The inner controller can be chosen as a P, a
PI, a PD or a PID controller. There always exists a ‘What if ...’
dilemma for the inner controller mode selection.
3) Robustness. Robustness should always be considered in controller
tuning since there exists loop interaction in a cascade structure. In the
sequential tuning, we need to consider how aggressive the inner and
the outer controller can be tuned without affecting the robustness of
the other loop.
182
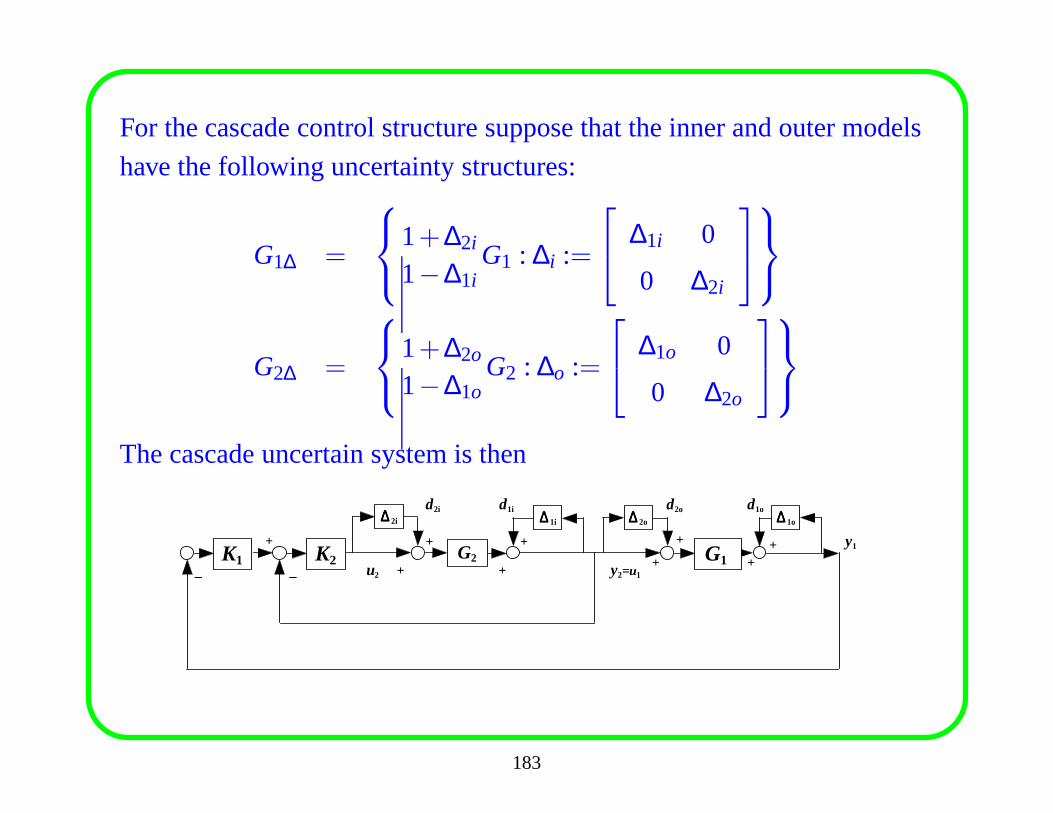
For the cascade control structure suppose that the inner andouter models
have the following uncertainty structures:
G1∆ =
1+∆2i
1−∆1iG1 : ∆i :=
∆1i 0
0 ∆2i
G2∆ =
1+∆2o
1−∆1oG2 : ∆o :=
∆1o 0
0 ∆2o
The cascade uncertain system is then
K2
∆∆∆∆ 2i
G2
∆∆∆∆ 1i
+ +
_
d2i d1i
y1
∆∆∆∆ 2o
G1
∆∆∆∆ 1o
+ +
d2o d1o
K1_ y2=u1u2
+
+ ++ +
183
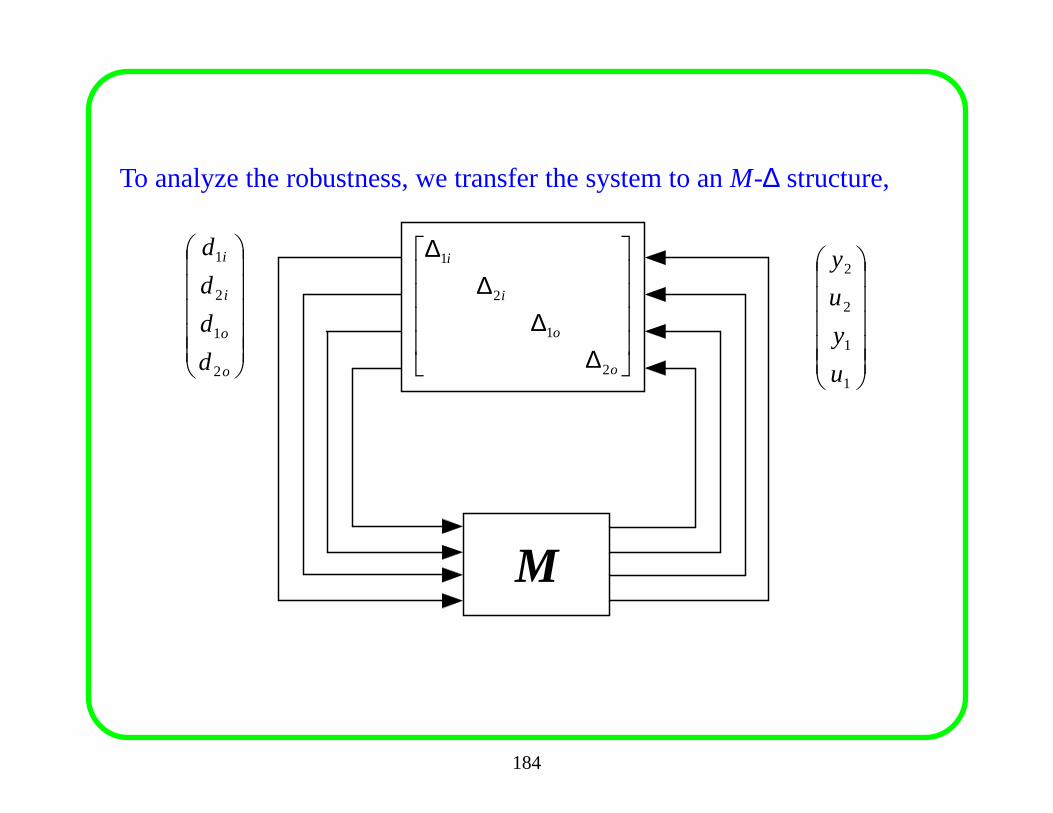
To analyze the robustness, we transfer the system to anM-∆ structure,
M
∆∆
∆∆
o
o
i
i
2
1
2
1
o
o
i
i
d
d
d
d
2
1
2
1
1
1
2
2
u
y
u
y
184
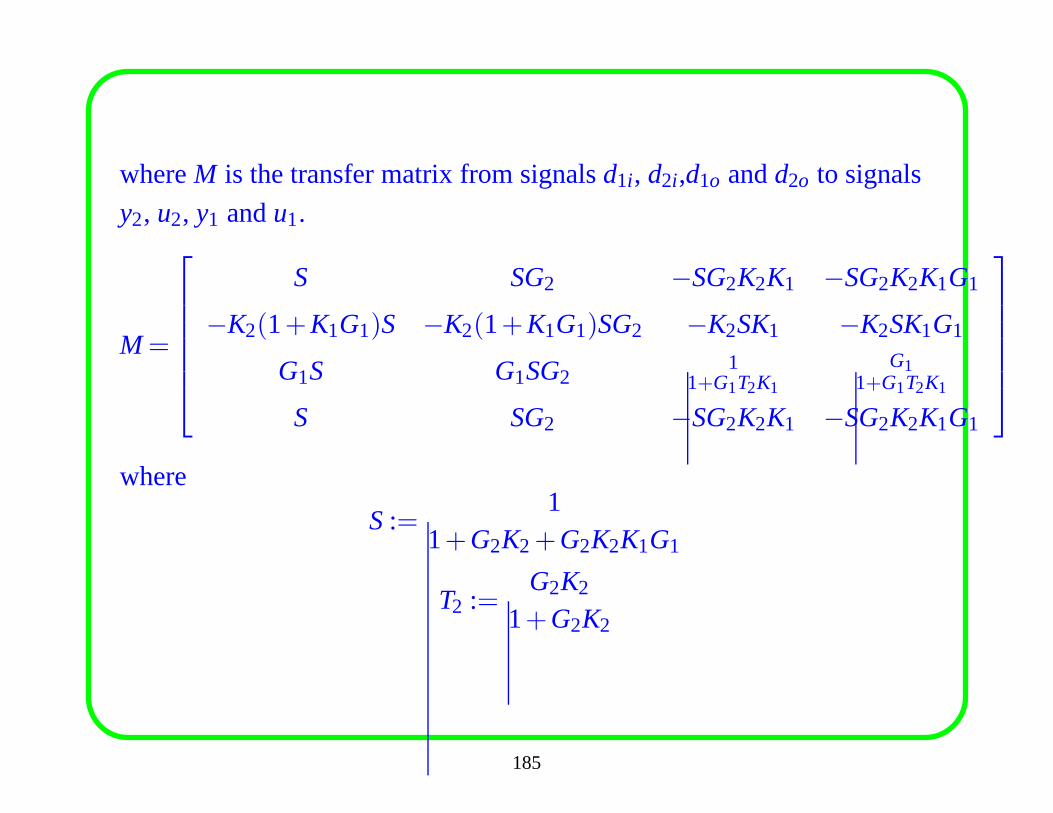
whereM is the transfer matrix from signalsd1i , d2i ,d1o andd2o to signals
y2, u2, y1 andu1.
M =
S SG2 −SG2K2K1 −SG2K2K1G1
−K2(1+K1G1)S −K2(1+K1G1)SG2 −K2SK1 −K2SK1G1
G1S G1SG21
1+G1T2K1
G11+G1T2K1
S SG2 −SG2K2K1 −SG2K2K1G1
where
S:=1
1+G2K2+G2K2K1G1
T2 :=G2K2
1+G2K2
185
Suppose the uncertainties for the inner and outer models areindependent,
define the overall system uncertainty as
∆ :=
∆i 0
0 ∆o
=
∆1i 0 0 0
0 ∆2i 0 0
0 0 ∆1o 0
0 0 0 ∆2o
then by the smallµ theorem, the configuration is robustly stable if and
only if
µ∆(M)<1
‖∆‖∞
Thusµ∆(M) is a robustness measure of the cascade system.
186
We can also analyze the system robustness against the inner (outer) model
uncertainty individually. If there is only inner model uncertainty, then we
just need to consider the upper 2×2 block ofM; and if there is only outer
model uncertainty, then we need to consider the lower 2×2 block ofM.
We denote the corresponding blocks by
Mi :=
11+G2K2(1+K1G1)
G21+G2K2(1+K1G1)
− K2(1+K1G1)1+G2K2(1+K1G1)
− K2(1+K1G1)G21+G2K2(1+K1G1)
Mo :=
11+G1T2K1
G11+G1T2K1
− T2K11+G1T2K1
− T2K1G11+G1T2K1
Compared with a conventional feedback structure it is clearthat the ‘real’
inner loop controller becomesK2(1+K1G1), while the ‘real’ outer
controller becomesT2K1. The interaction between the inner and the outer
loop is clear.
187
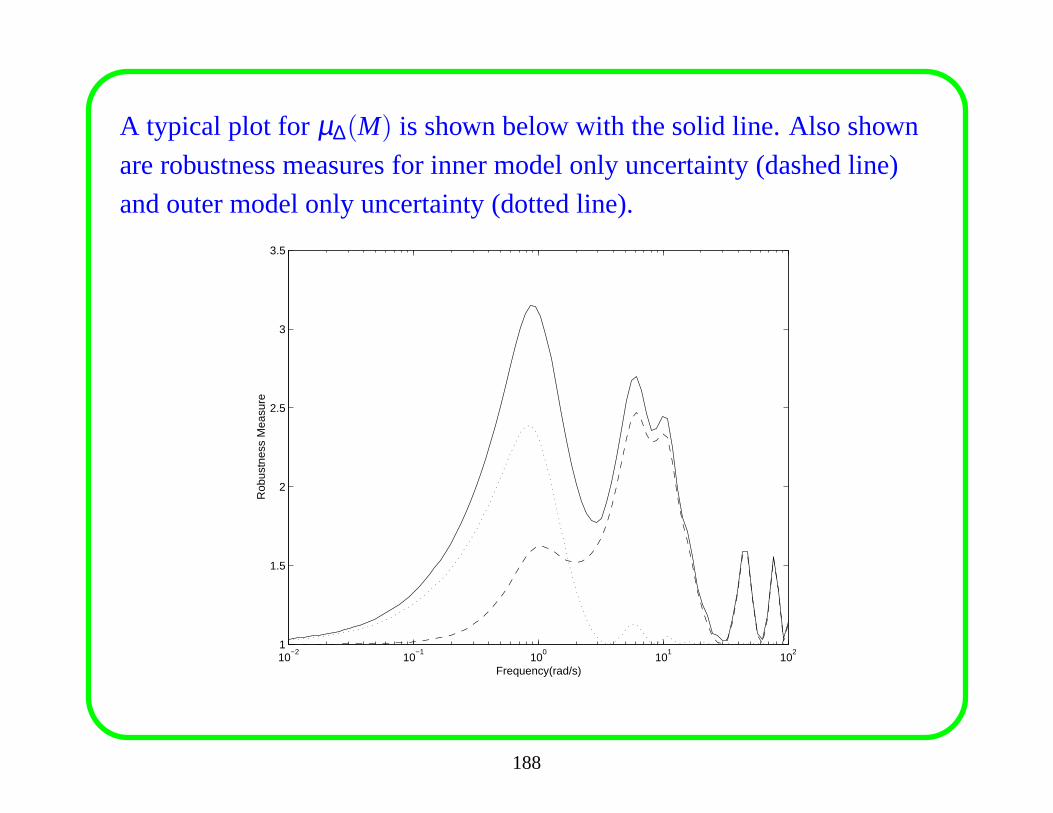
A typical plot for µ∆(M) is shown below with the solid line. Also shown
are robustness measures for inner model only uncertainty (dashed line)
and outer model only uncertainty (dotted line).
10−2
10−1
100
101
102
1
1.5
2
2.5
3
3.5
Frequency(rad/s)
Rob
ustn
ess
Mea
sure
188
It can be observed from this figure:
i) The robustness measure for a cascade structure has two peaks at two
different frequencies, which clearly correspond to the effect of the
inner loop (high frequency peak) and the outer loop (low frequency
peak). This property makes it easy to point out which loop is not
robustly tuned.
ii) The plot also shows the relative interaction between theinner loop
and the outer loop:
• If the inner loop is fast compared with the outer loop, then the
effect of one loop on the other loop is small. In this case the high
peak frequency is away from the low peak frequency.
• If the inner loop is slow, i.e., has almost the same speed as the
outer loop, the effect of one loop on the other loop is large. In this
case the high peak frequency is close to the low peak frequency.
189
Example
Consider a cascade system with the following inner and outermodels:
G1 =1
(s+1)2 e−s;G2 =1
αs+1e−αs
Two cases will be considered:
• Case 1.α = 0.2. A fast inner process.
• Case 2.α = 0.8. A slow inner process.
190
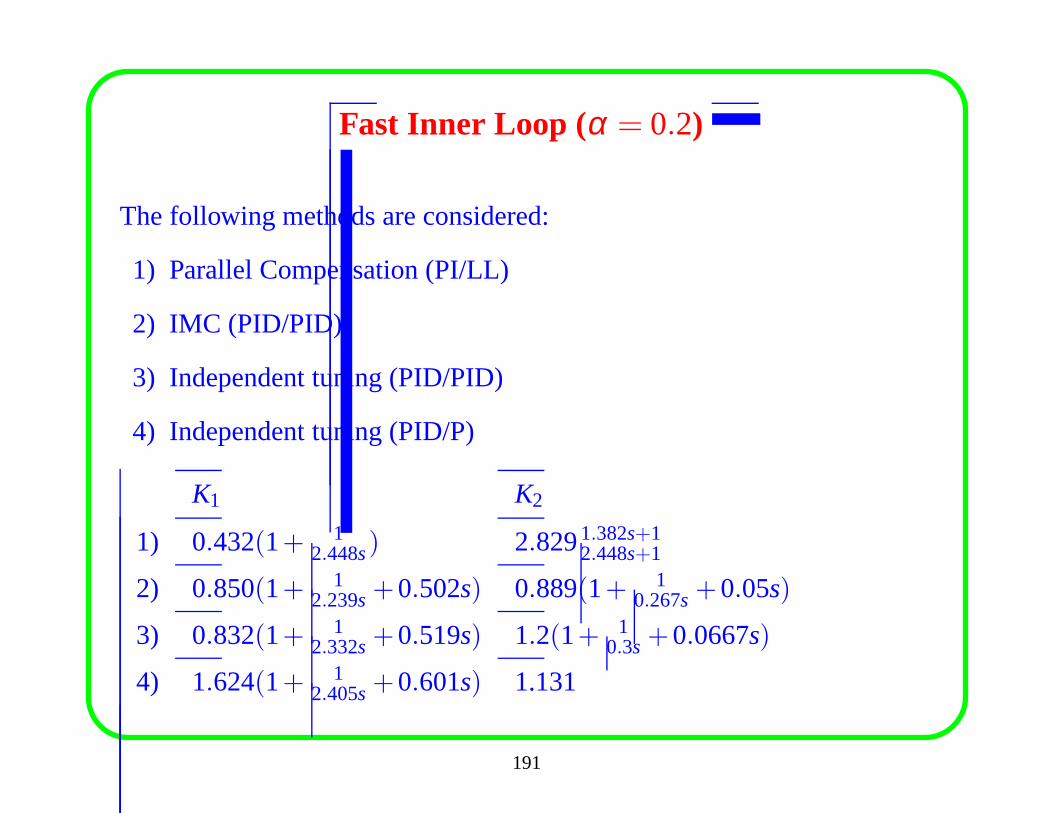
Fast Inner Loop (α = 0.2)
The following methods are considered:
1) Parallel Compensation (PI/LL)
2) IMC (PID/PID)
3) Independent tuning (PID/PID)
4) Independent tuning (PID/P)
K1 K2
1) 0.432(1+ 12.448s) 2.8291.382s+1
2.448s+1
2) 0.850(1+ 12.239s+0.502s) 0.889(1+ 1
0.267s+0.05s)
3) 0.832(1+ 12.332s+0.519s) 1.2(1+ 1
0.3s+0.0667s)
4) 1.624(1+ 12.405s+0.601s) 1.131
191
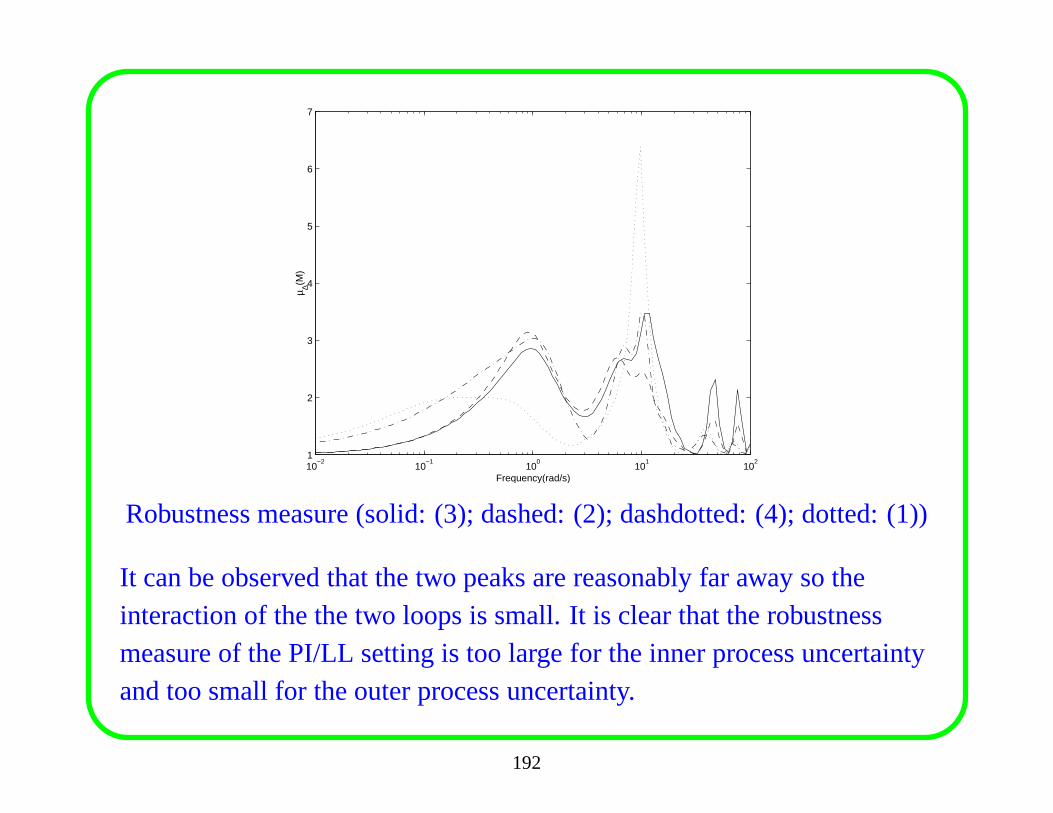
10−2
10−1
100
101
102
1
2
3
4
5
6
7
Frequency(rad/s)
µ ∆(M)
Robustness measure (solid: (3); dashed: (2); dashdotted: (4); dotted: (1))
It can be observed that the two peaks are reasonably far away so theinteraction of the the two loops is small. It is clear that therobustnessmeasure of the PI/LL setting is too large for the inner process uncertaintyand too small for the outer process uncertainty.
192
Performance Analysis
The overall inner loop integral gains of the PI/LL and the independent
tuning (PID/P) settings are 0.499 and 0.764, and those of thePID/PID by
the IMC method and the independent tuning method are 3.547 and 4.363.
It is clear that since PI/LL and PID/P do not have integral action in their
inner loops they have very weak integral actions. Best performance is
achieved by the proposed PID/PID controller due to its largest integral
action.
The step responses for the setpoint and the inner loop disturbance of the
closed-loop systems are shown below. It clearly verifies theclaim above.
193
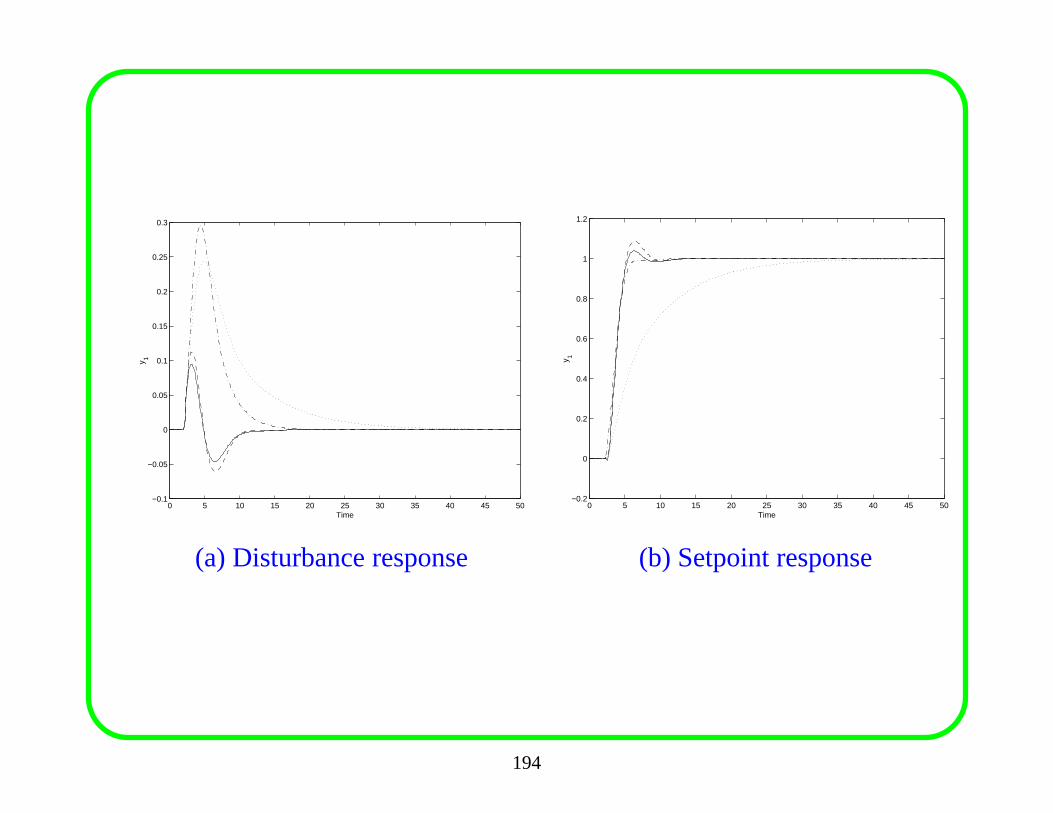
0 5 10 15 20 25 30 35 40 45 50−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Time
y 1
0 5 10 15 20 25 30 35 40 45 50−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Time
y 1(a) Disturbance response (b) Setpoint response
194
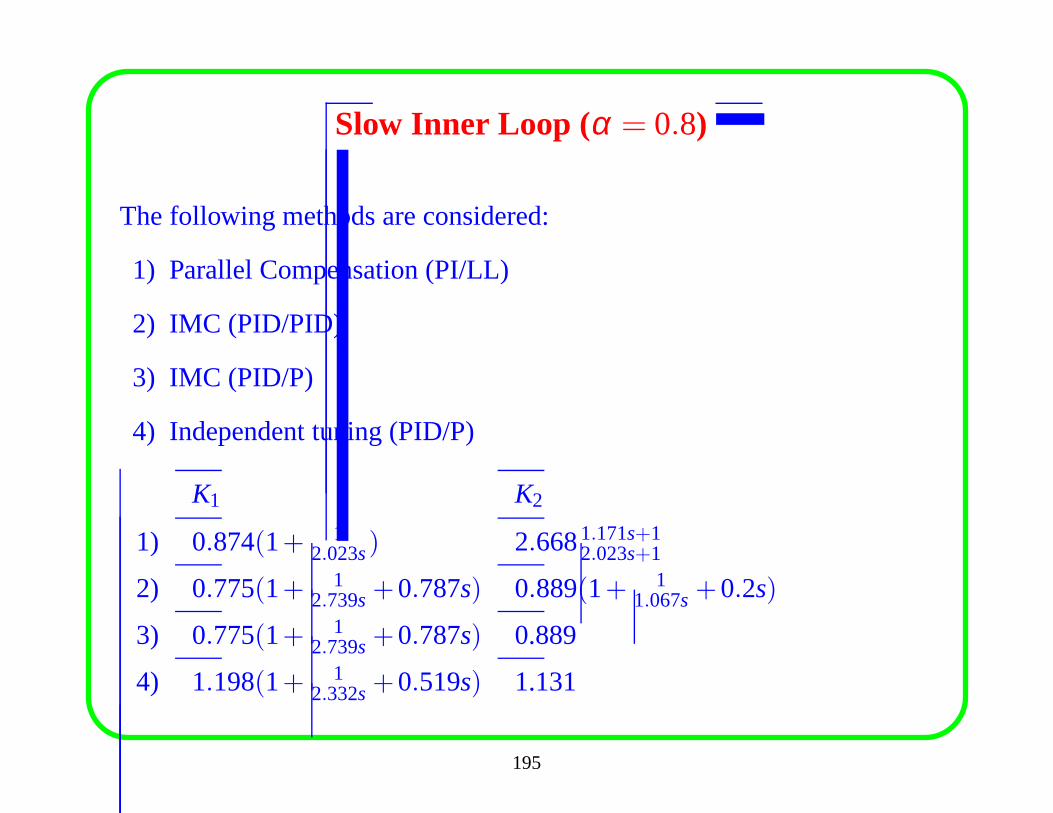
Slow Inner Loop (α = 0.8)
The following methods are considered:
1) Parallel Compensation (PI/LL)
2) IMC (PID/PID)
3) IMC (PID/P)
4) Independent tuning (PID/P)
K1 K2
1) 0.874(1+ 12.023s) 2.6681.171s+1
2.023s+1
2) 0.775(1+ 12.739s+0.787s) 0.889(1+ 1
1.067s+0.2s)
3) 0.775(1+ 12.739s+0.787s) 0.889
4) 1.198(1+ 12.332s+0.519s) 1.131
195
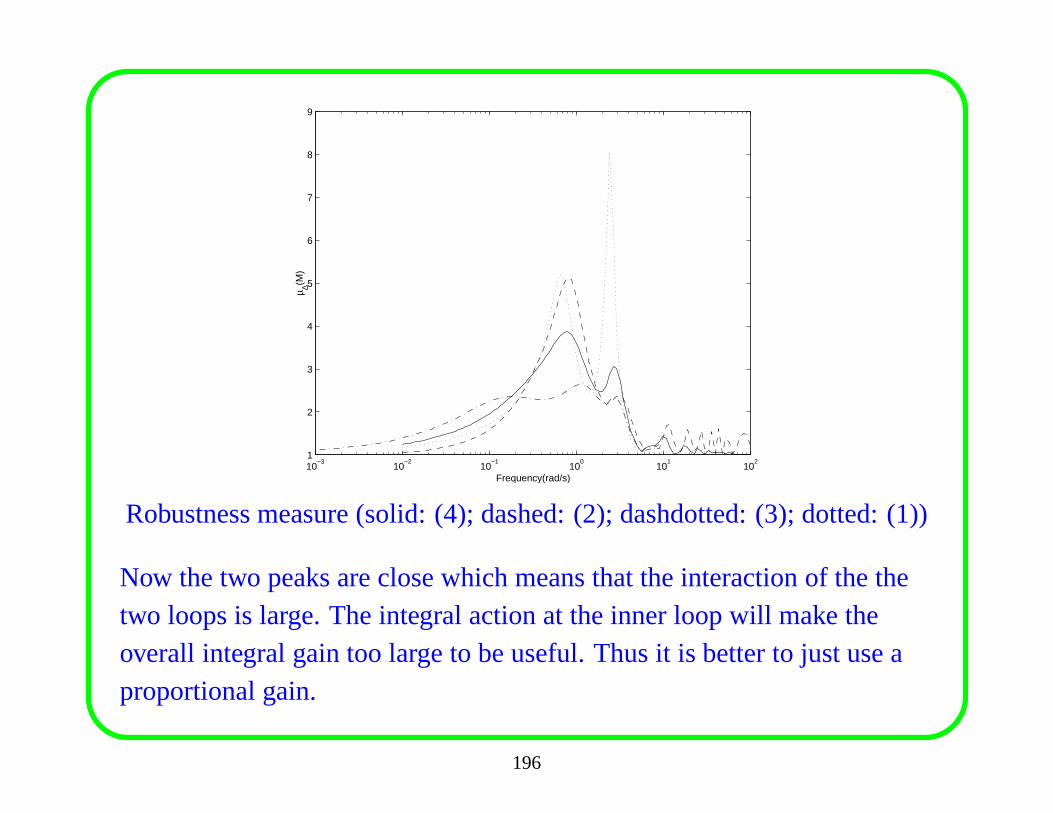
10−3
10−2
10−1
100
101
102
1
2
3
4
5
6
7
8
9
Frequency(rad/s)
µ ∆(M)
Robustness measure (solid: (4); dashed: (2); dashdotted: (3); dotted: (1))
Now the two peaks are close which means that the interaction of the thetwo loops is large. The integral action at the inner loop willmake theoverall integral gain too large to be useful. Thus it is better to just use aproportional gain.
196
Performance Analysis
Now the overall inner loop integral gains of the PI/LL and proposed
PID/P settings are 1.153 and 0.581, and those of the PID/PID and PID/P
by the IMC method are 1.730 and 0.252. The IMC PID/PID controller
has too large integral action at the inner loop so the disturbance response
is oscillatory, while the IMC PID/P has too small integral action so the
response is sluggish.
197
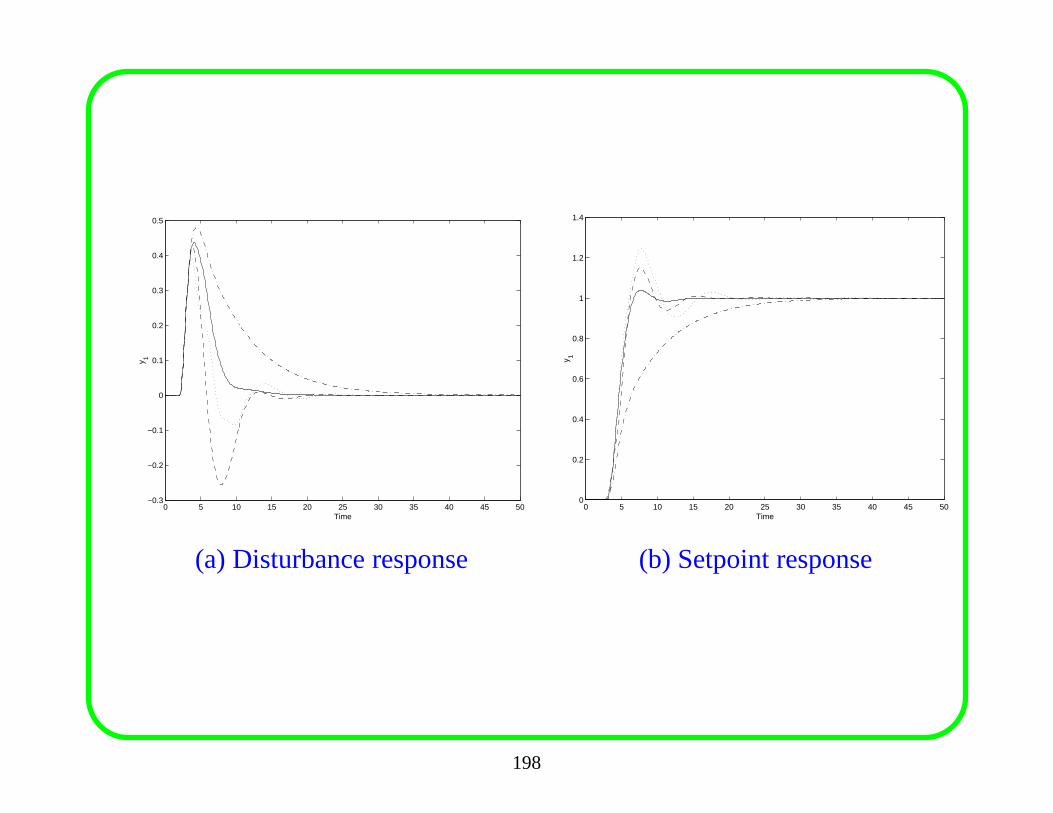
0 5 10 15 20 25 30 35 40 45 50−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Time
y 1
0 5 10 15 20 25 30 35 40 45 500
0.2
0.4
0.6
0.8
1
1.2
1.4
Time
y 1(a) Disturbance response (b) Setpoint response
198
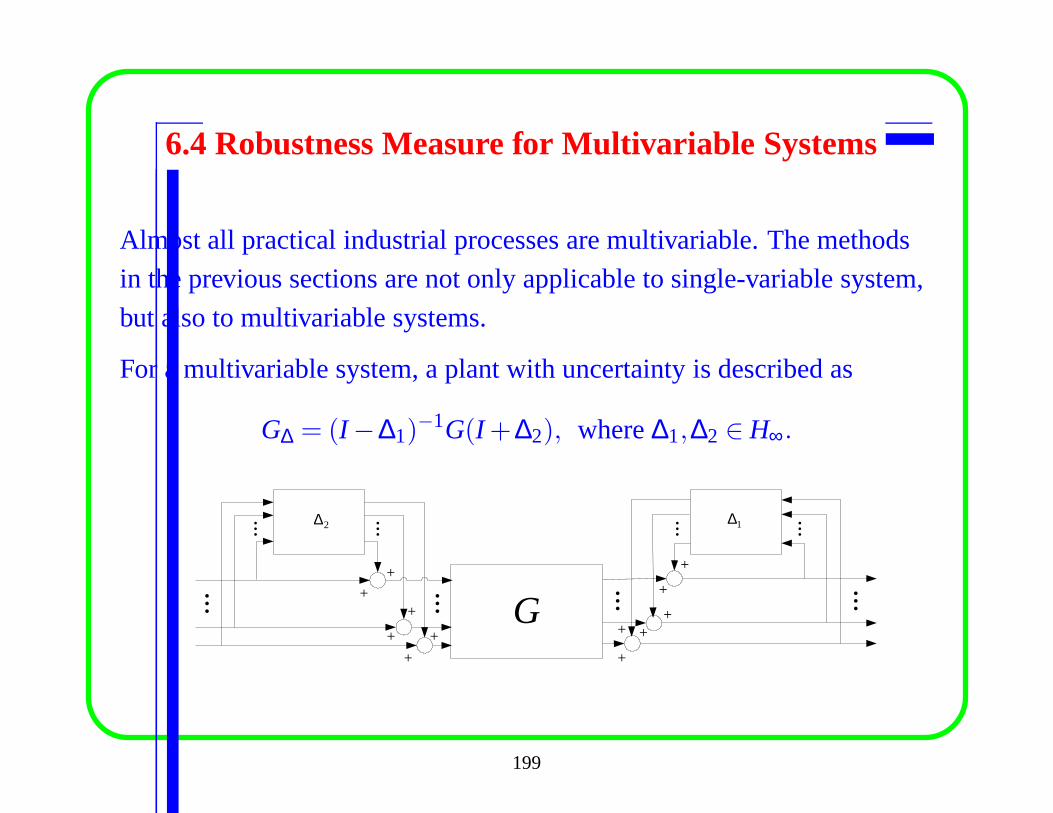
6.4 Robustness Measure for Multivariable Systems
Almost all practical industrial processes are multivariable. The methods
in the previous sections are not only applicable to single-variable system,
but also to multivariable systems.
For a multivariable system, a plant with uncertainty is described as
G∆ = (I −∆1)−1G(I +∆2), where∆1,∆2 ∈ H∞.
G+
+
+
+
+ +
+
+
+++
+
...
......
... ... ...
... ...2∆ 1∆
199
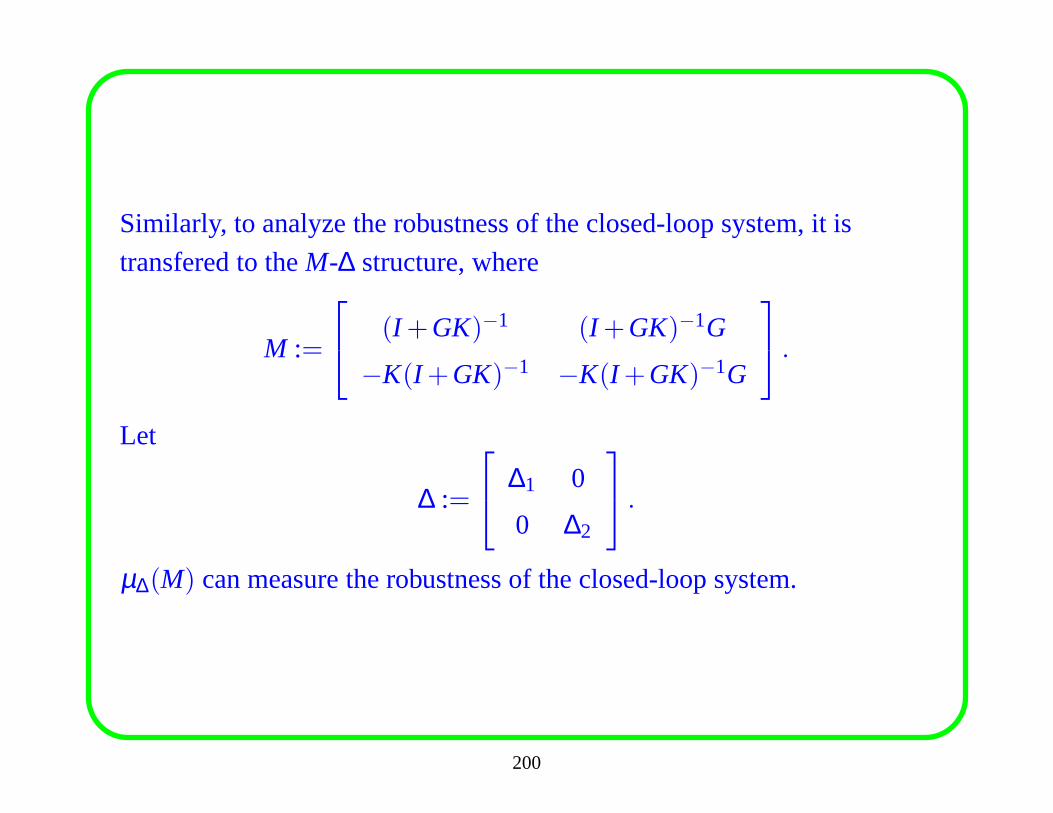
Similarly, to analyze the robustness of the closed-loop system, it is
transfered to theM-∆ structure, where
M :=
(I +GK)−1 (I +GK)−1G
−K(I +GK)−1 −K(I +GK)−1G
.
Let
∆ :=
∆1 0
0 ∆2
.
µ∆(M) can measure the robustness of the closed-loop system.
200
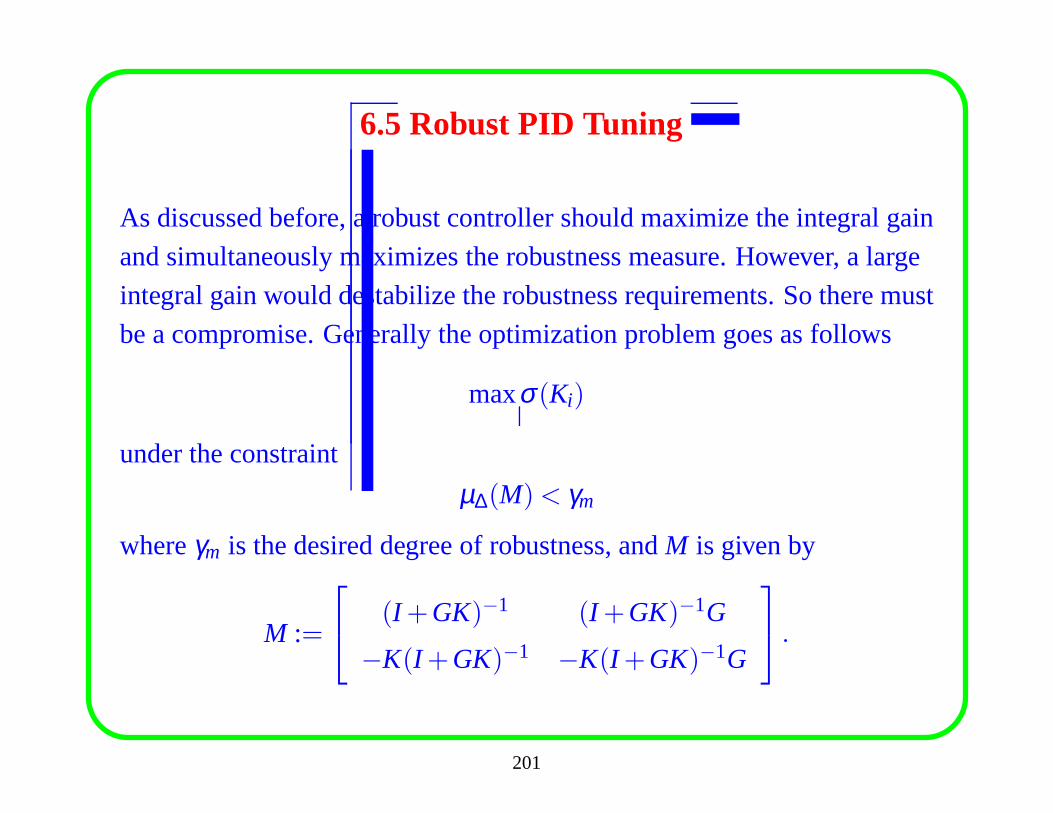
6.5 Robust PID Tuning
As discussed before, a robust controller should maximize the integral gain
and simultaneously maximizes the robustness measure. However, a large
integral gain would destabilize the robustness requirements. So there must
be a compromise. Generally the optimization problem goes asfollows
maxσ(Ki)
under the constraint
µ∆(M)< γm
whereγm is the desired degree of robustness, andM is given by
M :=
(I +GK)−1 (I +GK)−1G
−K(I +GK)−1 −K(I +GK)−1G
.
201
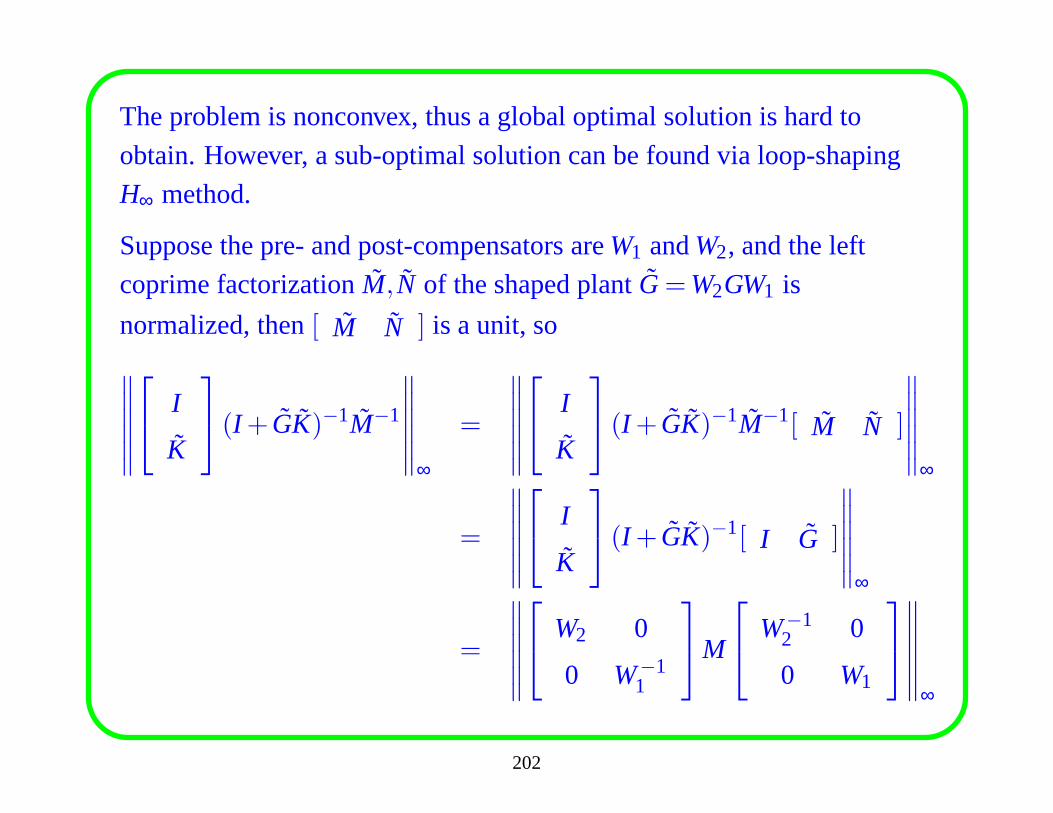
The problem is nonconvex, thus a global optimal solution is hard to
obtain. However, a sub-optimal solution can be found via loop-shaping
H∞ method.
Suppose the pre- and post-compensators areW1 andW2, and the left
coprime factorizationM, N of the shaped plantG=W2GW1 is
normalized, then[ M N ] is a unit, so
∥∥∥∥∥∥
I
K
(I + GK)−1M−1
∥∥∥∥∥∥
∞
=
∥∥∥∥∥∥
I
K
(I + GK)−1M−1[ M N ]
∥∥∥∥∥∥
∞
=
∥∥∥∥∥∥
I
K
(I + GK)−1[ I G ]
∥∥∥∥∥∥
∞
=
∥∥∥∥∥∥
W2 0
0 W−11
M
W−1
2 0
0 W1
∥∥∥∥∥∥
∞
202
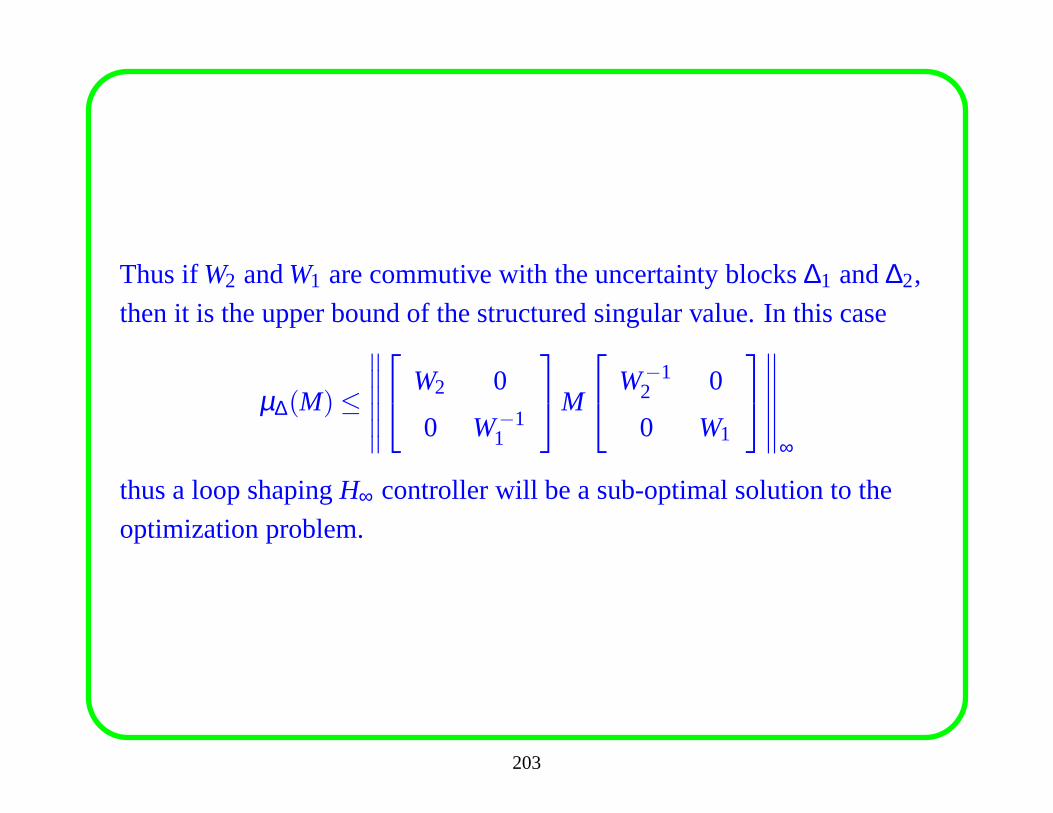
Thus ifW2 andW1 are commutive with the uncertainty blocks∆1 and∆2,
then it is the upper bound of the structured singular value. In this case
µ∆(M)≤
∥∥∥∥∥∥
W2 0
0 W−11
M
W−1
2 0
0 W1
∥∥∥∥∥∥
∞
thus a loop shapingH∞ controller will be a sub-optimal solution to the
optimization problem.
203
PID Tuning via Loop Shaping
In the usual loop-shaping design procedure, the pre-compensator has two
parts
W1 =WaWi
whereWa is usually chosen as a static decoupler andWi is diagonal. For
controller tuning purpose, we can simplify the choice by setting the
post-compensatorW2 as an identity matrix and the pre-compensatorW1 as
a diagonal PI one.
204
The reasons for just using a PI instead of a more sophisticated high-order
pre-compensator are as follows:
1) The final controller will be approximated by a PID one. Comparing
with a simple PI pre-compensator, a high-order pre-compensator
might result in a betterH∞ controller but not a better PID controller
due to the approximation. It may not be worth to find more
sophisticated open-loop shapes.
2) The time-domain performance of the closed-loop system isaffected
by the PI parameters just as in a single-loop process, which makes it
possible to tune the final PID controller by tuning the diagonal PI
pre-compensator.
3) As pointed out in (Skogestad-Postlethwaite:1996) for single-loop
processes, a PI pre-compensator is the ‘best’ for input disturbance
rejection.
205
However,Wa is usually not diagonal, thusW1 does not commute with∆2.
So the uncertainty which theH∞ problem tries to stabilize is only for the
shaped plant, not the actual plant, which is the main source of criticism
for the method. We note that the closed-loop system will showgood
disturbance rejection as long as the integral action is reasonable; the
coupling of the process will only affect the setpoint tracking. So in
loop-shaping design we can first ignore the coupling effect of a
multivariable process, and after the design we can choose a setpoint filter
to modify the setpoint tracking properties.
For example, in a 2×2 system, the final setpoint filter has the following
form:
F =
1 − f1
− f2 1
To completely decouple the setpoint responses,f1 and f2 should be
206
chosen as
f1 = T−111 T12, f2 = T−1
22 T21
whereT is the complementary sensitivity matrix and the subscriptsrefer
to its denoted elements. To realize, a first-order approximation can be
used. Note thatT12 andT21 have derivative action; so the filter will have
the form of asbs+1. In general, we can choose the setpoint filter as
F(s) =
1λ11s+1 − λ12s
λ12s+1
− λ21sλ21s+1
1λ22s+1
where the parameters are tuned to reduce the overshoots and the coupling
in the setpoint responses.
207
In summary, PID tuning procedure based on loop shapingH∞ approach
goes as follows:
1) Select a diagonal PI compensatorW1 such that the valueεmax is
reasonable (between 0.2 and 0.5, which makes the robustness
indicator lie between 2 and 5). In this step we also try to makethe
integral action ofW1 as large as possible.
2) Approximate the resultingH∞ controller with a PID.
3) If necessary, tune a setpoint filter to decouple the setpoint responses.
4) If the time-domain performance is unsatisfactory, follow the idea of
tuning single-loop PI controllers to find another pre-compensator,
and repeat the above steps.
208
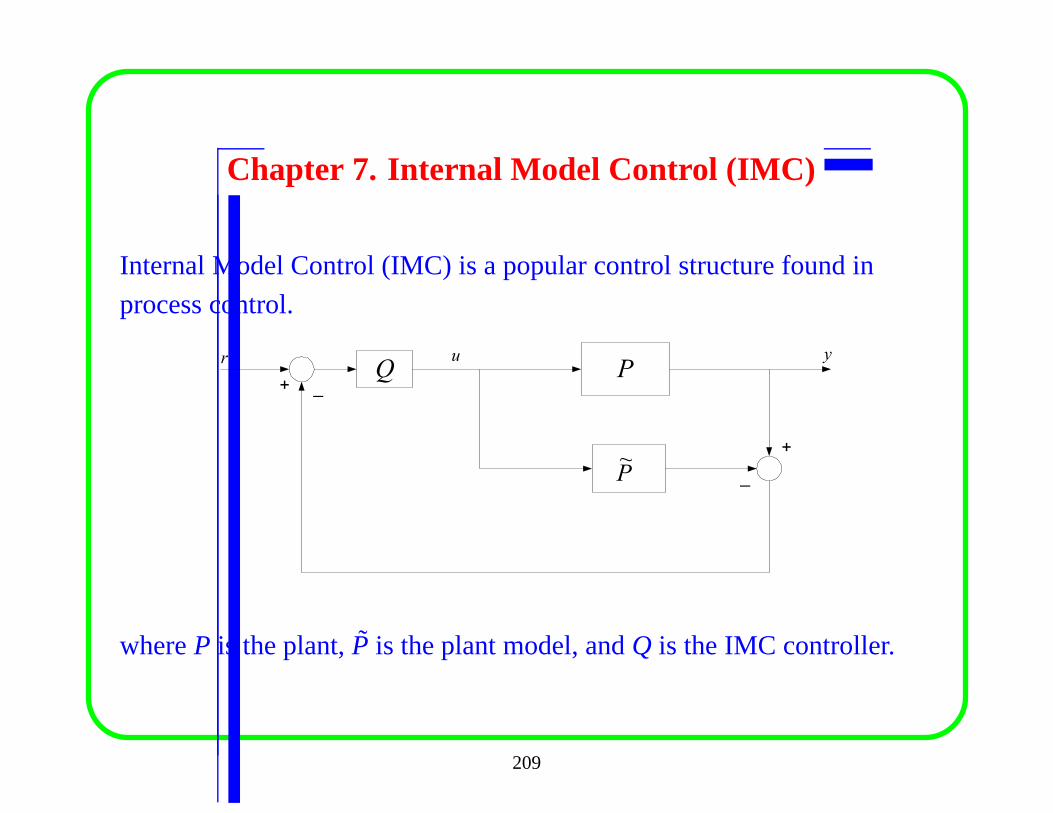
Chapter 7. Internal Model Control (IMC)
Internal Model Control (IMC) is a popular control structurefound in
process control.
Pr y
+
_
_Q
u
+
P~
whereP is the plant,P is the plant model, andQ is the IMC controller.
209
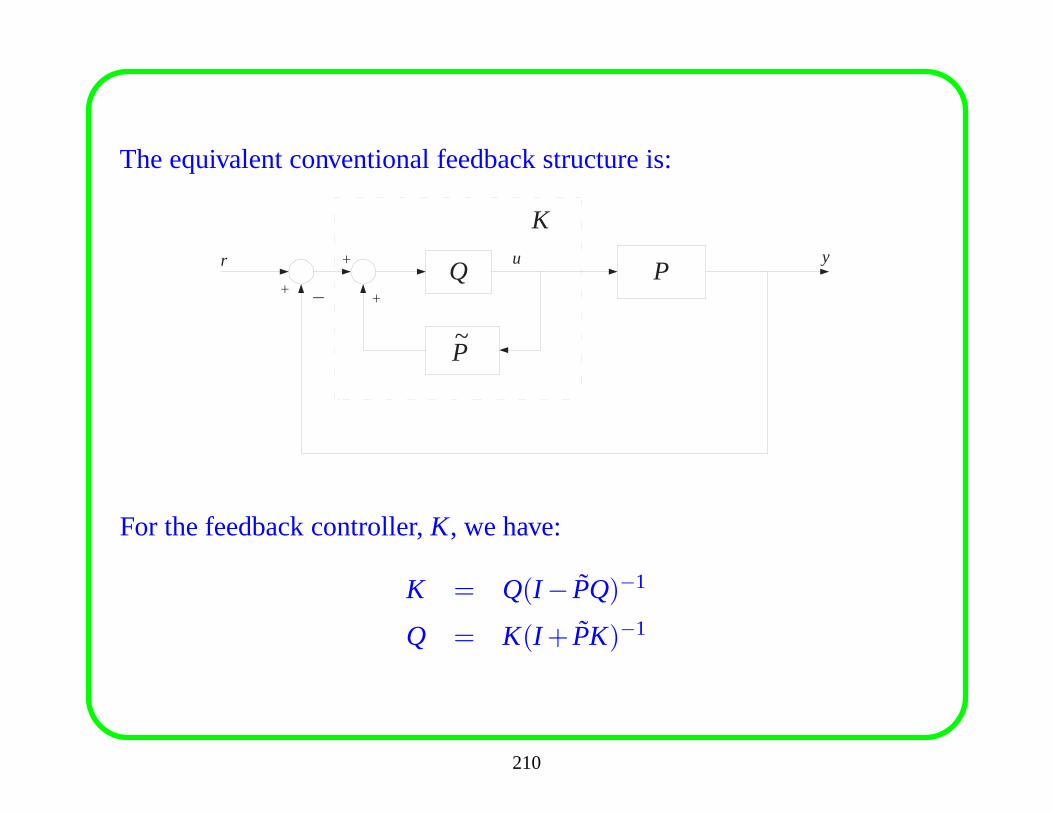
The equivalent conventional feedback structure is:
P r y +
+ _
Q u
+
P ~
K
For the feedback controller,K, we have:
K = Q(I − PQ)−1
Q = K(I + PK)−1
210
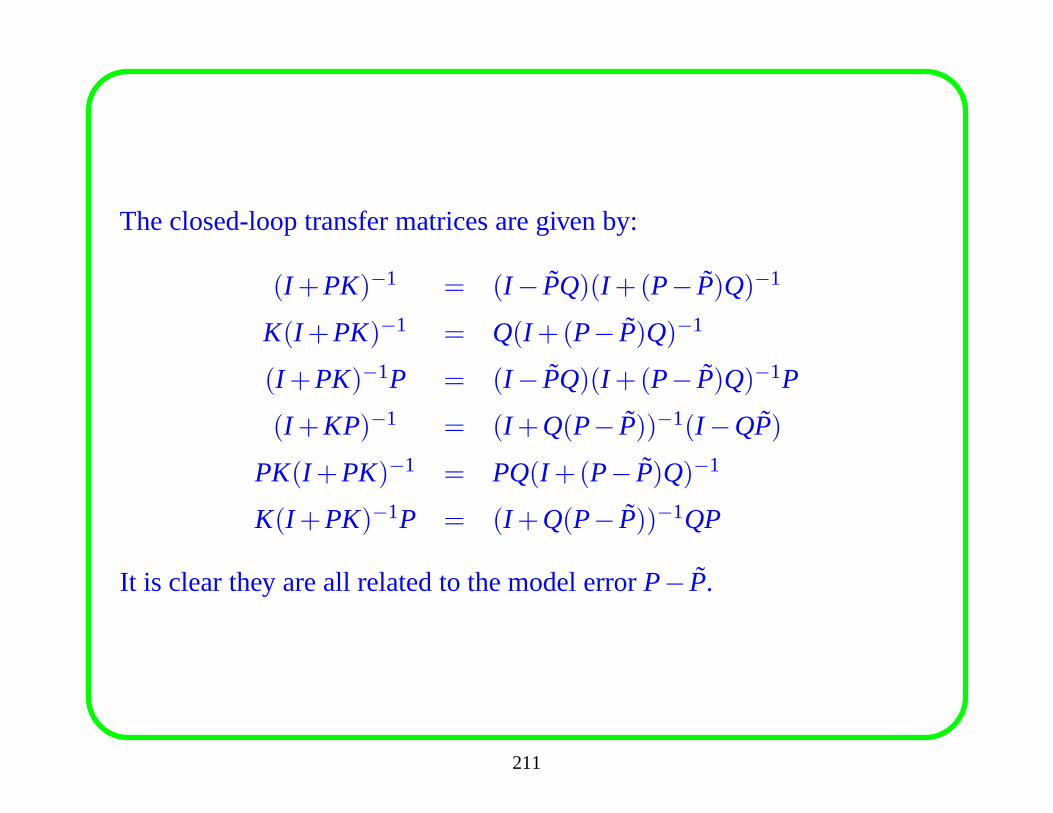
The closed-loop transfer matrices are given by:
(I +PK)−1 = (I − PQ)(I +(P− P)Q)−1
K(I +PK)−1 = Q(I +(P− P)Q)−1
(I +PK)−1P = (I − PQ)(I +(P− P)Q)−1P
(I +KP)−1 = (I +Q(P− P))−1(I −QP)
PK(I +PK)−1 = PQ(I +(P− P)Q)−1
K(I +PK)−1P = (I +Q(P− P))−1QP
It is clear they are all related to the model errorP− P.
211
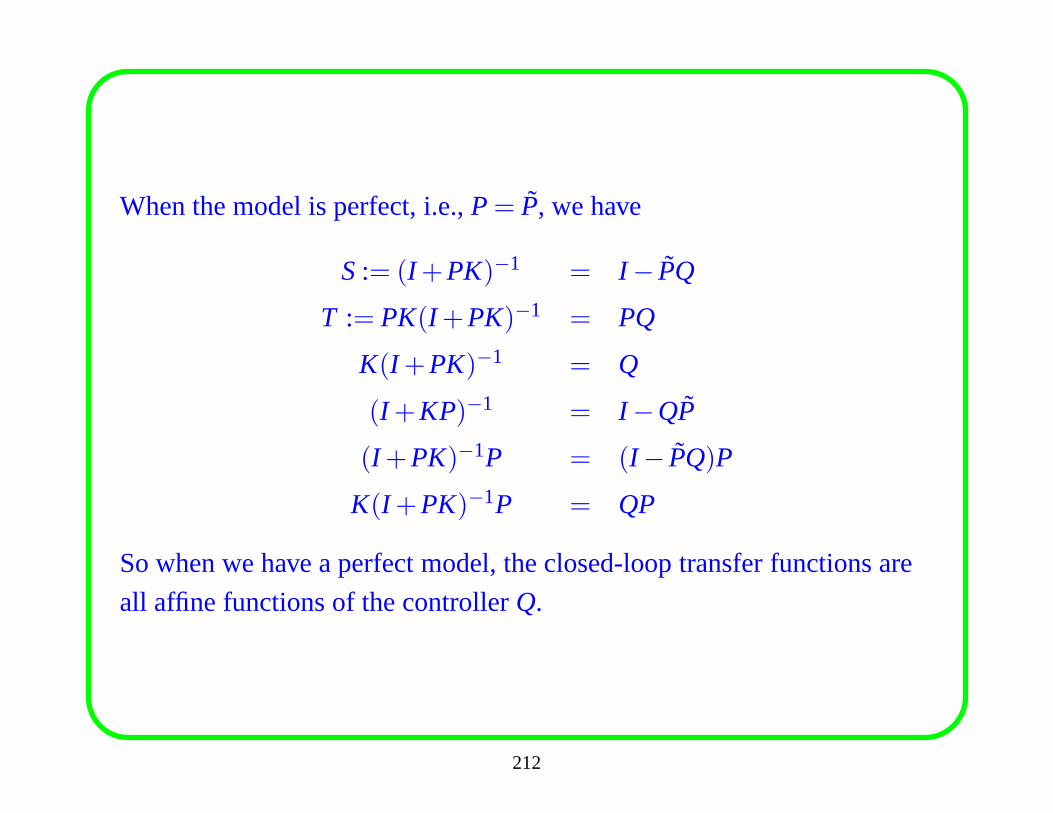
When the model is perfect, i.e.,P= P, we have
S:= (I +PK)−1 = I − PQ
T := PK(I +PK)−1 = PQ
K(I +PK)−1 = Q
(I +KP)−1 = I −QP
(I +PK)−1P = (I − PQ)P
K(I +PK)−1P = QP
So when we have a perfect model, the closed-loop transfer functions are
all affine functions of the controllerQ.
212
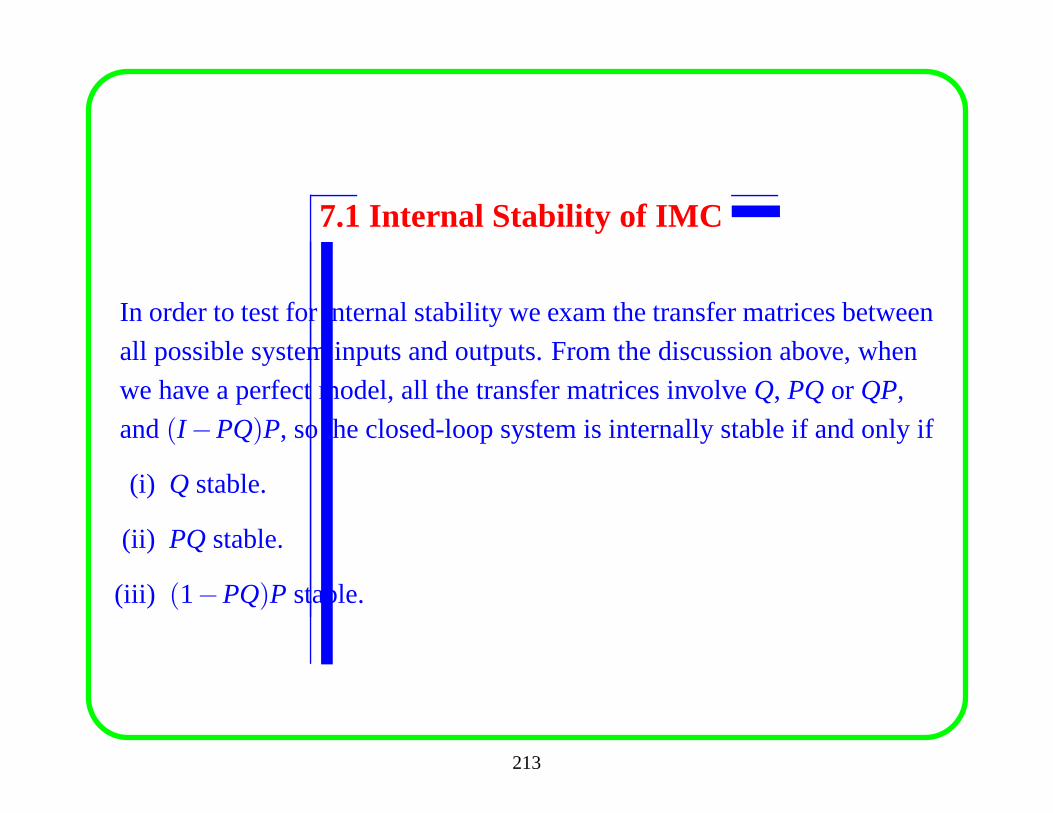
7.1 Internal Stability of IMC
In order to test for internal stability we exam the transfer matrices between
all possible system inputs and outputs. From the discussionabove, when
we have a perfect model, all the transfer matrices involveQ, PQ or QP,
and(I −PQ)P, so the closed-loop system is internally stable if and only if
(i) Q stable.
(ii) PQ stable.
(iii) (1−PQ)P stable.
213
So we have:
Theorem: Assume that the model is perfect (P= P). Then the IMC
structure is internally stable if and only if both the plantP and the
controllerQ are stable.
Thus the structure cannot be used to control plants which areopen-loop
unstable.
Nevertheless, even for unstable plants we can exploit the features of the
IMC structure for control system design and then implement the
controllerK in the classic manner.
214
7.2 IMC Design
To design an IMC controller, consider the following problem:
1. Nominal Performance. H2 or H∞ performance.
minQ
‖WeS‖α = minQ
‖We(I − PQ)‖α , α = 2,∞
2. Robust Stability. Multiplicative uncertainty.
‖WyT‖∞ = ‖WyPQ‖∞ < 1
3. Robust Performance.
minQ
‖WeS‖α , α = 2,∞, ∀P∈ {(I +Wy∆)P,∀‖∆‖∞ < 1}
215
Clearly what we need in practice is robust performance. However, for
IMC design, we consider a mixedH2/H∞-type problem for the following
reasons:
• It is hard to solve the optimal robust performance problem (3).
• H2-type performance is an integral-square-error (ISE) objective.
• Since the plant changes and the model quality degrades with time, it
is desirable to provide for convenient on-line robustness adjustment.
To solve the problem, a two-step design method is used. The method has
no inherent optimality characteristics but should providea good
engineering approximation to the optimal solution. It guarantees
robustness but the performance is generally not optimal in any sense.
216
The design procedure goes as follows:
Step 1: Nominal Performance
The controllerQ is selected to yield a “good” system response for the
input(s) of interest, without regard for constraints and model
uncertainty. Generally we will chooseQ such that it is
integral-square-error (ISE) orH2-optimal for a specific set of
reference inputv.
minQ
‖(I − PQ)v‖2
Step 2: Robust Stability and Performance
The aggressive controllerQ obtained in Step 1 is detuned to satisfy
the robustness requirements. For that purposeQ is augmented by a
filter F of fixed structure
Q= QF
217
The filter parameters are adjusted to meet the robustness requirement.
Sometimes a more complicated form is required.
In general, it might not be possible to meet the robust performance
requirement. The reason could be that the design procedure fails to
produce an acceptableQ.
On the other hand, there might not exist anyQ such that the
requirement is satisfied. Then the performance requirements have to
be relaxed and/or the model uncertainty has to be reduced.
218
Nominal Performance
Nominal performance can be guaranteed by solving theH2-optimization
problem. Generally the plantP can be factored into a stable all-pass
portionPA and an minimum-phase (MP) portionPM such that
P= PAPM
HerePA andPM are stable andPHA ( jω)PA( jω) = I .
Similarly, the set of inputsv can be factored as
v= vMvA
wherevM is minimum-phase andvA is all-pass.
219
SincevA andPA are all-pass, we have
‖(I − PQ)v‖2 = ‖(I −PAPMQ)vMvA‖2
= ‖P−1A vM︸ ︷︷ ︸
M
−PMQvM︸ ︷︷ ︸
N
‖2
GenerallyM andN are inL2. Since we require that the system beinternally stable, we must haveN ∈ H2. DecomposeM as the sum of thestable and the unstable part:
M = M++M−, with M+ ∈H2,M− ∈H⊥2
then
minN∈H2
‖M−N‖22 = min
N∈H2‖M++M−−N‖2
2
= minN∈H2
(‖M+−N‖22+‖M−‖2
2) = ‖M−‖22
The minimum is achieved whenN = M+.
220
So we have
Theorem: TheH2-optimal controllerQ is given by
Q= P−1M {P−1
A vM}+v−1M
The operator(P−1A vM)+ denotes the stable part of the transfer matrix
P−1A vM. It can be obtained by omitting all terms involving the polesof
P−1A after a partial fraction expansion ofP−1
A vM.
Generally the IMC controller is the inverse of the minimum-phase part of
the plantP. Moreover, if the plant is minimum-phase, i.e.,P= PM, then
the IMC controller is just the inverse of the plant.
221
Robust Stability and Performance
The controllerQ is to be detuned through a lowpass filterF such that for
the detuned controllerQ both the robust stability and the robust
performance conditions are satisfied.
In principle the structure ofF can be as complex as the designer wishes.
However, in order to keep the number of variables in the optimization
problem small, a simple structure like a diagonalF with first- or
second-order terms is recommended.
In most cases this is not restrictive because the controllerQ designed in
the first step of the IMC procedure is a full matrix with high order
elements. Some restrictions must be imposed on the filter in the case of an
open-loop unstable plant. Also a more complex filter structure may be
necessary in cases of highly ill-conditioned systems.
222
Generally the filterF is chosen to be a diagonal rational function
F(s) = diag{ f1(s), . . . , fn(s)}
and it must satisfy the following requirements:
(a) Pole-zero excess. The controllerQ= QF must be proper.
(b) Internal stability. Q, PQand(I −PQ)P must be stable.
(c) Asymptotic setpoint tracking and/or disturbance rejection. (I −PQ)v
must be stable.
In most cases this is not restrictive because the controllerQ designed in
the first step of the IMC procedure is a full matrix with high order
elements. Some restrictions must be imposed on the filter in the case of an
open-loop unstable plant.
223
Open-loop Stable Plants
Since the open-loop is stable, (b) and (c) are satisfied whenever F isstable. A reasonable choice of a filter elementfl (s) would be:
fl (s) =1
(λs+1)m
wherem is chosen to makeQ proper.
Open-loop Unstable Plants
Let πi(i = 1, . . . ,k) be the open RHP poles ofP. Let π0 = 0 andm0l be thelargest multiplicity of such a pole in any element of thel -th row ofv. Itfollows that thel -th element,fl of the filterF must satisfy:
Condition (b): fl (πi) = 1, i = 0,1, . . . ,k
Condition (c): d j
dsj fl (s)|s=π0= 0, j = 1, . . . ,m0l −1
224
The requirements clearly show the limitation that RHP polesplace on the
robustness properties of a control system designed for an open-loop
unstable plant.
Since one cannot reduce the closed-loop bandwidth of the nominal system
at frequencies corresponding to the RHP poles of the plant, only a
relatively small model error can be tolerated at those frequencies.
Experience has shown that the following structure for a filter element
fl (s) is reasonable:
fl (s) =avl−1,l svl−1+ · · ·+a1,l s+a0,l
(λs+1)r+vl−1
For a specific tuning parameterλ the numerator coefficients can be
computed to satisfy (b) and (c).
225
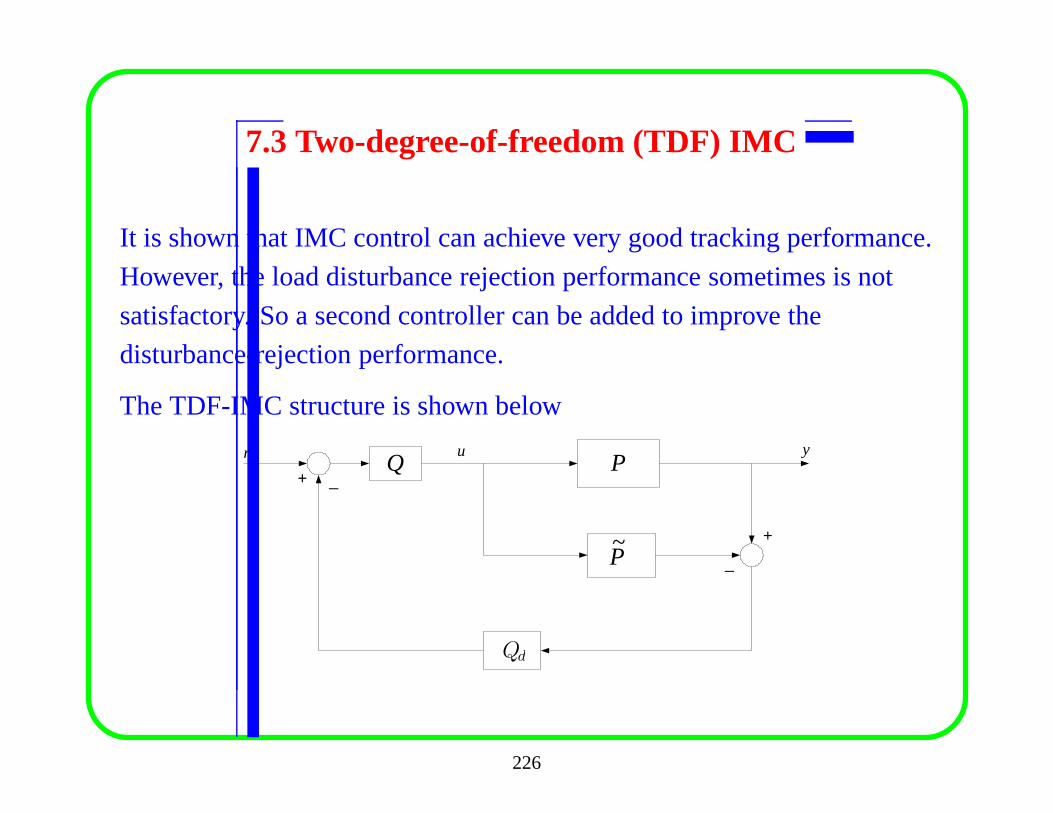
7.3 Two-degree-of-freedom (TDF) IMC
It is shown that IMC control can achieve very good tracking performance.
However, the load disturbance rejection performance sometimes is not
satisfactory. So a second controller can be added to improvethe
disturbance-rejection performance.
The TDF-IMC structure is shown below
Pr y
+
_
_Q
u
+
P~
Qd
226
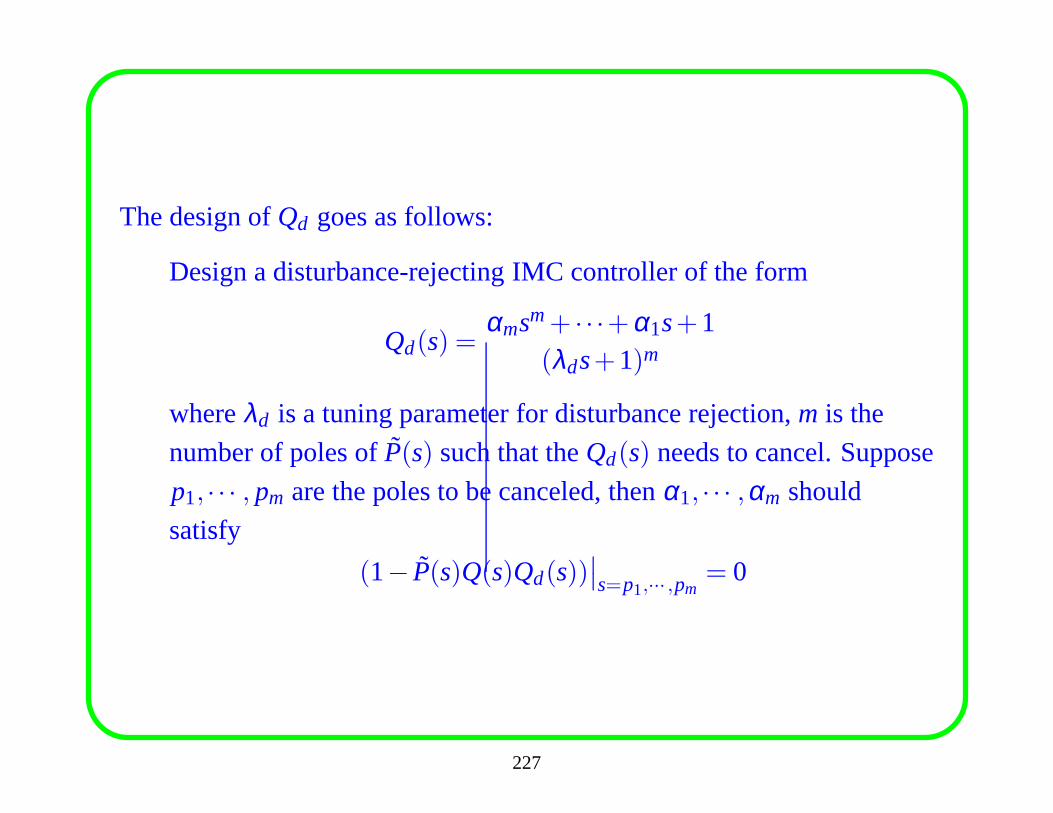
The design ofQd goes as follows:
Design a disturbance-rejecting IMC controller of the form
Qd(s) =αmsm+ · · ·+α1s+1
(λds+1)m
whereλd is a tuning parameter for disturbance rejection,m is the
number of poles ofP(s) such that theQd(s) needs to cancel. Suppose
p1, · · · , pm are the poles to be canceled, thenα1, · · · ,αm should
satisfy
(1− P(s)Q(s)Qd(s))∣∣s=p1,··· ,pm
= 0
227
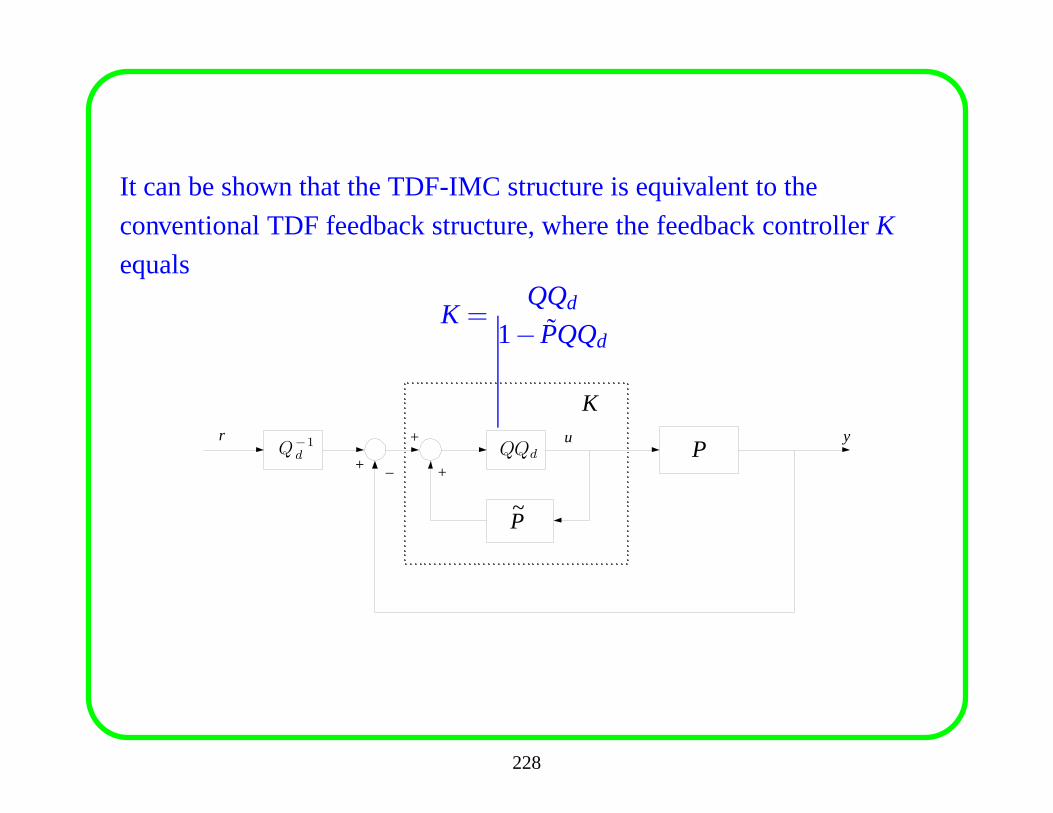
It can be shown that the TDF-IMC structure is equivalent to the
conventional TDF feedback structure, where the feedback controller K
equals
K =QQd
1− PQQd
Pr y+
+_
u
+
P~
K
Q¡1
d QQd
228
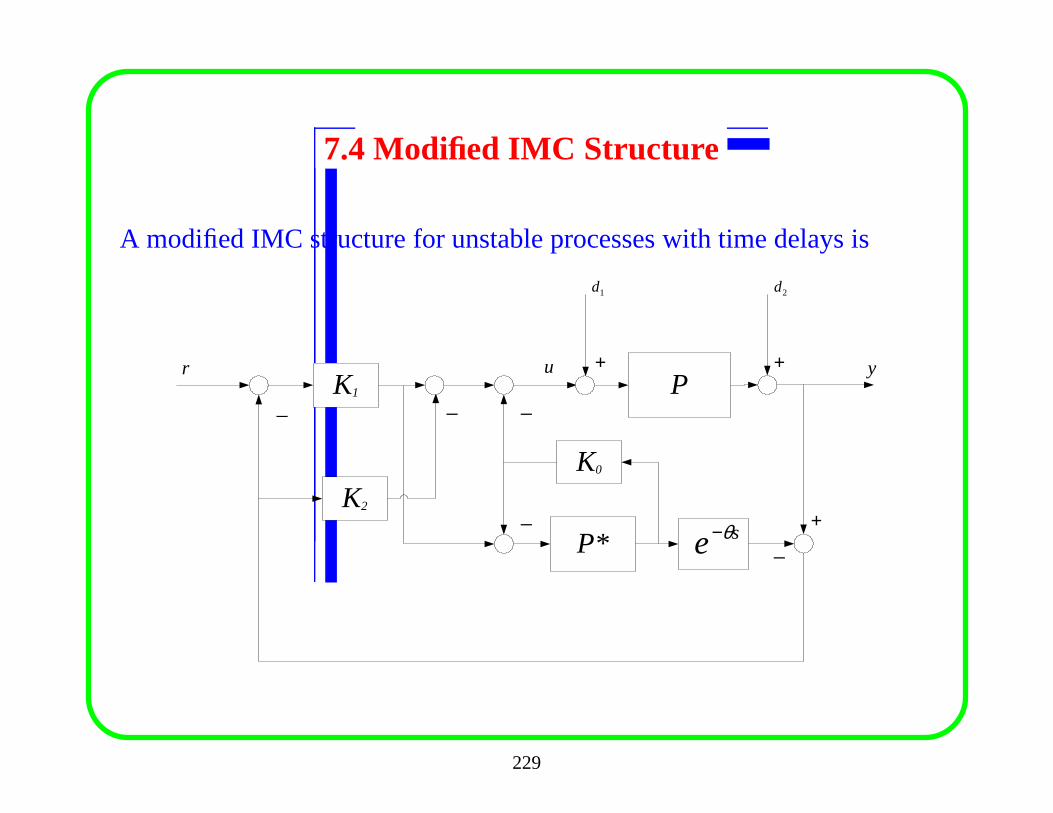
7.4 Modified IMC Structure
A modified IMC structure for unstable processes with time delays is
P
P*
r y
+_
_
1d 2d
++
K2
_K1
K0
_
_se θ−
u
229
The advantages of the modified IMC structure are:
• IMC structure can be retained for unstable processes. Controllers do
not have to be converted to conventional ones for implementation.
• Setpoint tracking and disturbance rejection can be designed
separately. The setpoint tracking design follows the standard IMC
design for a stable plant.
• Robustness and disturbance rejection mainly rely on a controller in a
feedback loop. Robustness of the whole structure can be considered
by tuning this controller.
230
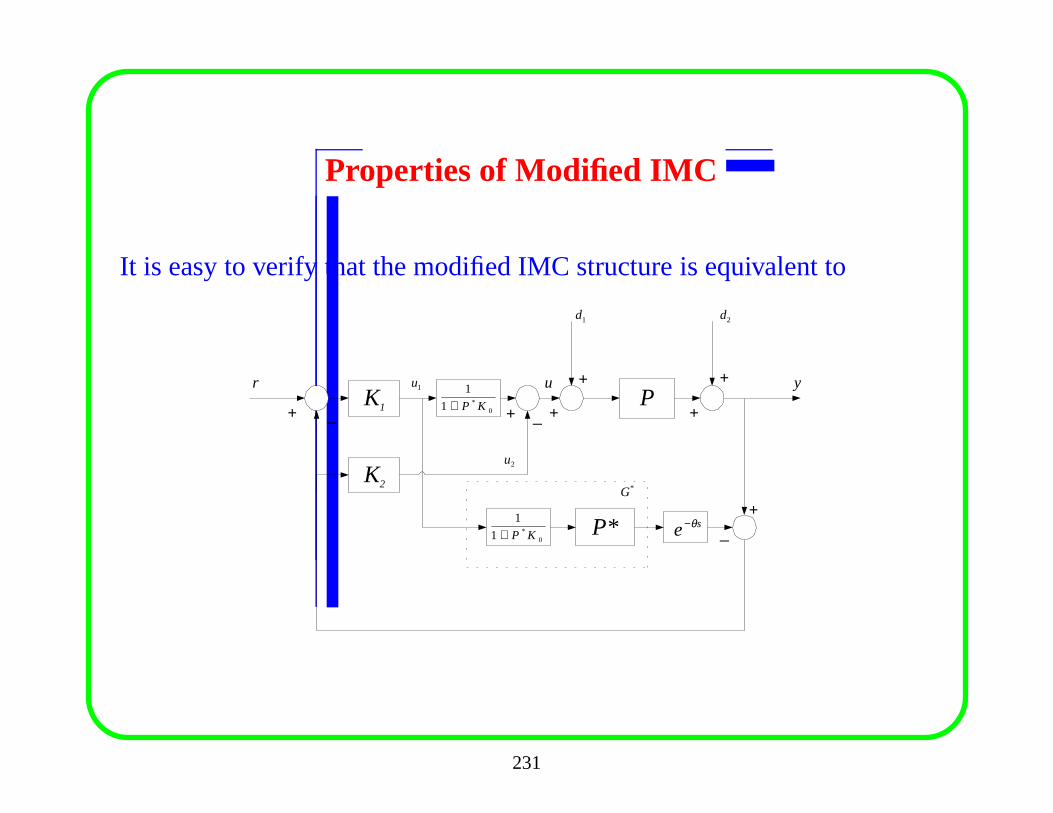
Properties of Modified IMC
It is easy to verify that the modified IMC structure is equivalent to
P
P* se θ−
r y
+
_
_
1d 2d
++
K2
_K1
u
0*1
1
KP+
*G
1u
2u
0*1
1
KP+
+ + ++
231
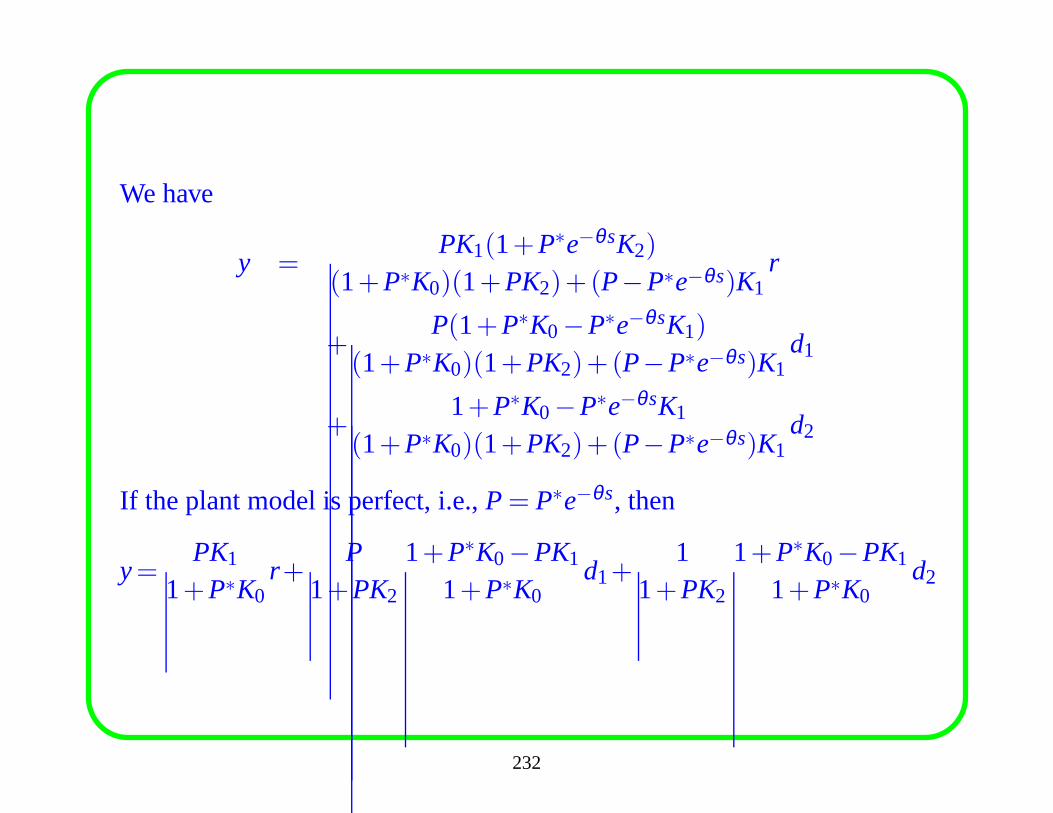
We have
y =PK1(1+P∗e−θsK2)
(1+P∗K0)(1+PK2)+(P−P∗e−θs)K1r
+P(1+P∗K0−P∗e−θsK1)
(1+P∗K0)(1+PK2)+(P−P∗e−θs)K1d1
+1+P∗K0−P∗e−θsK1
(1+P∗K0)(1+PK2)+(P−P∗e−θs)K1d2
If the plant model is perfect, i.e.,P= P∗e−θs, then
y=PK1
1+P∗K0r+
P1+PK2
1+P∗K0−PK1
1+P∗K0d1+
11+PK2
1+P∗K0−PK1
1+P∗K0d2
232
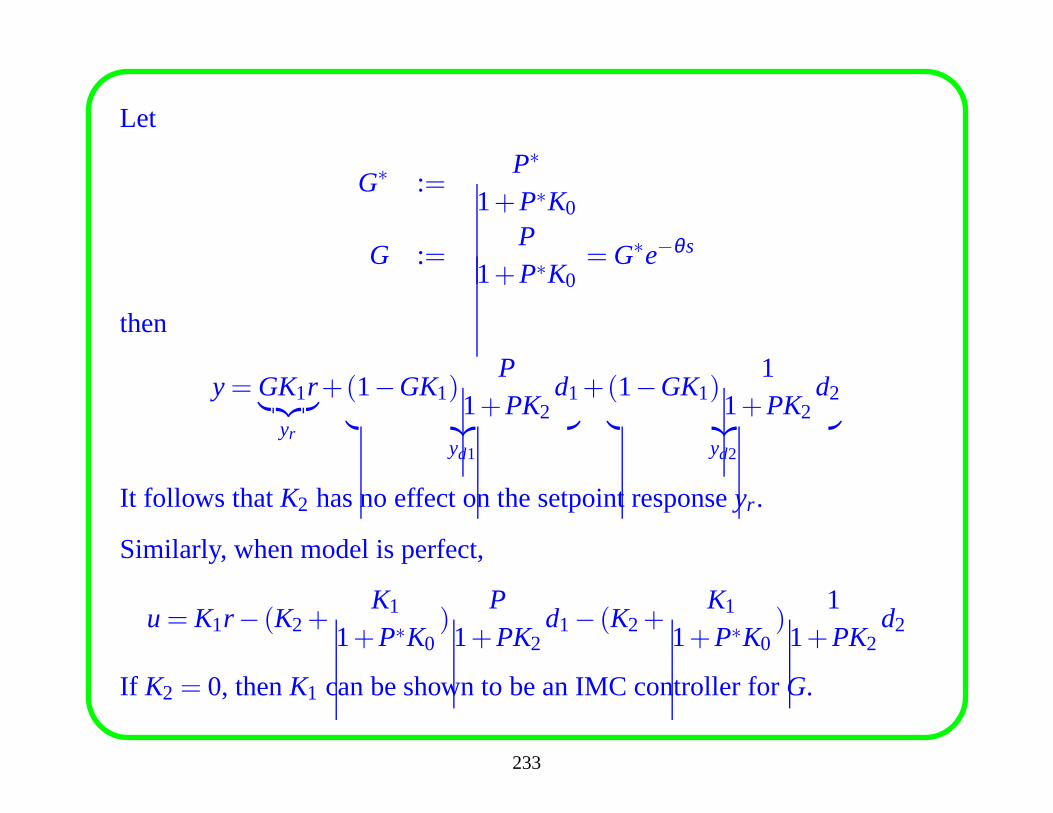
Let
G∗ :=P∗
1+P∗K0
G :=P
1+P∗K0= G∗e−θs
then
y= GK1r︸ ︷︷ ︸
yr
+(1−GK1)P
1+PK2d1
︸ ︷︷ ︸
yd1
+(1−GK1)1
1+PK2d2
︸ ︷︷ ︸
yd2
It follows thatK2 has no effect on the setpoint responseyr .
Similarly, when model is perfect,
u= K1r − (K2+K1
1+P∗K0)
P1+PK2
d1− (K2+K1
1+P∗K0)
11+PK2
d2
If K2 = 0, thenK1 can be shown to be an IMC controller forG.
233
The structure thus proposed has three compensators, namely, K0, K1, and
K2, each having a distinctive use and influence on the overall closed loop
response:
• K0 is used to stabilizeP∗, the original (unstable) plant, ignoring the
time-delay.
• K1 is an IMC controller for the new modelG.
• K2 is used to stabilize the original unstable systemP, with the delay
θ . It is crucial for the internal stability of the structure.
234
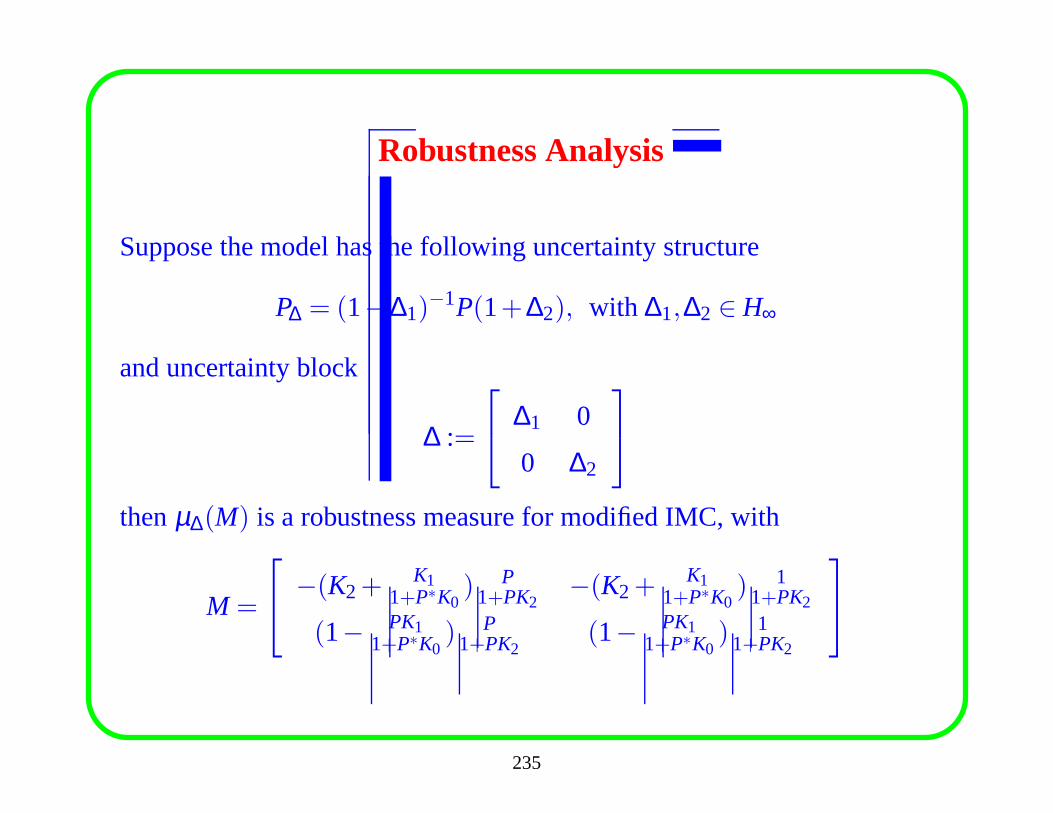
Robustness Analysis
Suppose the model has the following uncertainty structure
P∆ = (1−∆1)−1P(1+∆2), with ∆1,∆2 ∈ H∞
and uncertainty block
∆ :=
∆1 0
0 ∆2
thenµ∆(M) is a robustness measure for modified IMC, with
M =
−(K2+
K11+P∗K0
) P1+PK2
−(K2+K1
1+P∗K0) 1
1+PK2
(1− PK11+P∗K0
) P1+PK2
(1− PK11+P∗K0
) 11+PK2
235
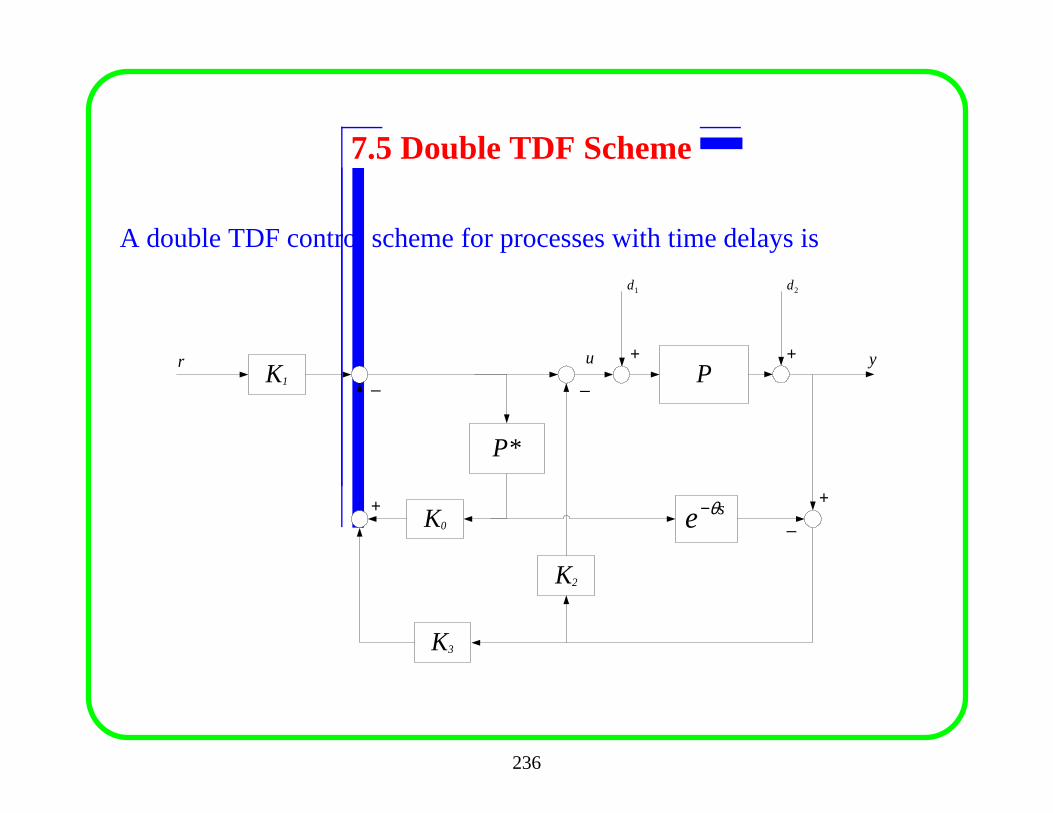
7.5 Double TDF Scheme
A double TDF control scheme for processes with time delays is
P
P*
r y
+_
_
1d 2d
++
K2
K1
K0
_
+ se θ−
u
K3
236
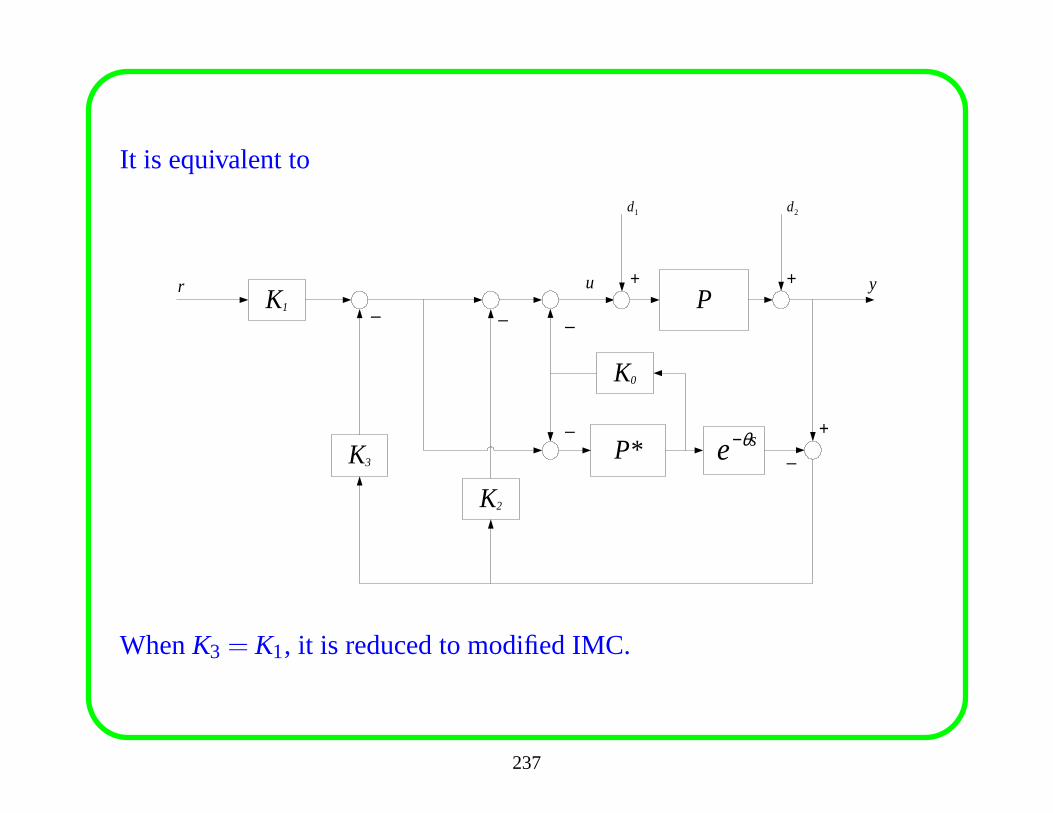
It is equivalent to
P
P*
r y
+_
_
1d 2d
++
K2
_K1
K0
_
_se θ−
u
K3
WhenK3 = K1, it is reduced to modified IMC.
237
Chapter 8. Wide-Range Robust Control
Robust controller synthesis aims to achieve acceptable performance under
model uncertainties. A common source of model uncertainties is the
change of operating points due to system nonlinearity. If a process has
severe nonlinearity, then a single robust controller may not achieve global
performance, hence wide-range robust controllers are required.
• Gain scheduling control is a possible method to achieve wide-range
performance, however gain scheduling needs to have a detailed
nonlinear model or complete knowledge of the operating points,
which is not practical. Moreover, the cost of implementing again
scheduling controller is high.
238
• Another possible method to achieve wide-range performanceis to
use multi-model control. The method divides the operating range into
several ‘linear’ range, and designs linear controllers at each local
operating point, and combines them into a multi-model controller.
The idea is simple and the simulation results shown that the method
is effective.
• A still simpler method is to ‘avoid’ the nonlinearity of a unit by
carefully choosing the operating points. The idea is that some of the
operating points are seldom met in practice so even if the linear
controller may not work well under such operating points it can still
get good global performance as long as the controller does not enter
such an operating range.
239
8.1 Gap Metric
The robust control design techniques assume that we have some
description of the model uncertainties (i.e., we have a measure of the
distance from the nominal plant to the set of uncertainty systems). This
measure is usually chosen to be a metric or a norm (e.g.,H∞-norm).
However, theH∞ norm can be a poor measure of the distance between
systems with respect to feedback control system design.
240
For example, consider
G1 =1s, G2 =
1s+0.1
The closed-loop complementary sensitivity functions corresponding toG1
andG2 with unity feedback are relatively close and their difference is
‖ G1
1+G1− G2
1+G2‖∞ = 0.0909
but the difference betweenG1 andG2 is
‖G1−G2‖∞ = ∞
This shows that the closed-loop behavior of two systems can be very
close even though the norm of the difference between the two open-loop
systems can be arbitrarily large.
241
To deal with such problems, the gap metric was introduced into the
control literature by Zames and El-Sakkary as being appropriate for the
study of uncertainty in feedback systems.
Definition and Computation
Let G(s) be ap×m rational transfer matrix and letG have the following
normalized right coprime factorization
G= NM−1, with M∼M+N∼N = I
The graph ofG is a closed subspace ofH2 given by
G(G) =
M
N
H2
242
The gap between two linear systemsG1 andG2 is defined by
δg(G1,G2) :=∥∥ΠG(G1)−ΠG(G2)
∥∥
whereΠK denotes the orthogonal projection ontoK.
It was shown that the gap metric can be computed as follows:
Theorem: Let G1 = N1M−11 andG2 = N2M−1
2 be normalized right
coprime factorizations. Then
δg(G1,G2) = max{~δ (G1,G2),~δ (G2,G1)}
where~δg(G1,G2) is the directed gap and can be computed by
~δg(G1,G2) = infQ∈H∞
∥∥∥∥∥∥
M1
N1
−
M2
N2
Q
∥∥∥∥∥∥
∞
243
Properties of Gap metric
1. If δg(G1,G2)< 1, then
δg(G1,G2) = ~δg(G1,G2) = ~δg(G2,G1)
2. The gap metric can be thought of as a measure of the ‘distance’
between two linear systems. It is an extension of the common
measure – the magnitude (the∞-norm) of the difference between two
systems. The gap metric is not only applicable to stable systems, but
also to integrating and unstable systems. For example, the distance in
the gap metric sense for the two systems considered above is
G1 =1s, G2 =
1s+0.1
,δ (G1,G2) = 0.0995.
244
3. The reason that the gap metric applies to integrating and unstable
systems is that it measures the ‘distance’ in the closed-loop sense
instead of the open-loop sense. Even though the open-loop systems
may look different, their distance can be close. For example, consider
G1 =100
2s+1, G2 =
1002s−1
.
The gap metric betweenG1 andG2 is
δ (G1,G2) = 0.0205,
which shows that they are indeed very close. In fact, we can show
that the closed loops corresponding toG1 andG2 with unity feedback
are close.
G1(1+G1)−1 =
50s+50.5
,G2(1+G2)−1 =
50s+49.5
‖G1(1+G1)−1−G2(1+G2)
−1‖∞ = 0.02
245
So a small distance between two systems in the gap metric sense
means that there exists at least one feedback controller that stabilizes
both systems and the distance between the closed loops is small in
the∞-norm sense. Here the closed loops contain the ‘gang of four’
transfer functions.
I
K
(I +GK)−1[
I G]
246
Robust Control and Gap Metric
Gap metric can be used to describe the uncertainties. The connection
between the uncertainties in the gap metric and the uncertainties
characterized by the normalized coprime factors is as follows.
Theorem: Let G0 have a normalized coprime factorizationG0 = N0M−10 .
Then for all 0< r ≤ 1,
{G :~δg(G,G0)< r}=
G : G= (N0+∆N)(M0+∆M)−1,
∥∥∥∥∥∥
∆N
∆M
∥∥∥∥∥∥
∞
< r
247
Let G be a linear system, andK be a stabilizing controller ofG. Let
bG, K :=
∥∥∥∥∥∥
I
K
(I +GK)−1[ I G ]
∥∥∥∥∥∥
−1
∞
.
Then we have:
Theorem: Suppose the feedback system with the pair(G,K) is stable. Let
G := {G∆ : δ (G,G∆)< γ}.
then the feedback system with the pair(G∆,K) is stable for allG∆ ∈ G if
and only if
γ ≤ bG, K .
248
8.2 Nonlinearity Measure
It is generally accepted that most industrial processes arenonlinear.
However, there is no definite quantification of the nonlinearity of a
process, specifically,
• How nonlinear is it?
• Can alinear controller be used to cover the whole operating range?
These are fundamental issues in the control system design. Without a
thorough understanding of the nonlinearity, the operatingrange and
performance of alinear controller cannot be guaranteed.
249
One way to approach this problem is to study the nonlinearityof a
process. The nonlinearity measure attracted much attention in the past
years, and several definitions and computation methods wereproposed.
Roughly speaking, a nonlinearity measure can be regarded asthe
‘distance’ between a nonlinear system and a class of feasible linear
systems.The first nonlinearity measure is defined as
v := infL∈Λ
‖N−L‖,
whereN is the nonlinear system considered, and the infimum is taken
over all the linear operatorsL in the feasible setΛ. The norm here can be
any appropriate norm, such asL2 or L∞. A largerv means that the system
is ‘more’ nonlinear; and in this case, a linear control may not achieve
good global performance.
250
The available nonlinearity measures have the following limitations:
1) Almost all the examples found in the literature are for SISO systems.
The computation is rather difficult for MIMO systems.
2) The available nonlinearity measures are not applicable for integrating
and unstable systems, since distances between unstable systems
cannot be measured in terms of standard norms.
A method to compute the distance between a nonlinear system and a
(fixed) linear system based on the gap metric concept was proposed. The
distance measure is closely related to nonlinearity measures in that a
nonlinearity measure computes the distance between a specified nonlinear
system and any of the feasible linear systems. So the distance measure is
the basis for computing nonlinearity measures.
251
With the gap, we can define a nonlinearity measure as
vd := infL∈Λ
δd(N,L) = infL∈Λ
supr
δ (LrN,L),
whereLrN is the linearization ofN along trajectoryr.
A more convenient measure is
vg := supr0
δ (Lr0N,L),
whereLr0N is the linearization ofN at the operating pointr0. The
difference betweenLrN andLr0N is that the linearization along a
trajectory is usually time varying, while at an operating point it is
time-invariant.
252
While vd is more appropriate for quantifying the nonlinearity of a system
andvg only reflects the nonlinear dynamics near an operating point, there
are several advantages in usingvg:
1) The computation ofvg is simple.vd involves the gap between a linear
time-varying systemLrN and a linear time-invariant systemL. There
is no efficient method to compute it. On the contrary, the gap
between two linear systems can be easily computed [?].
2) In practical industrial processes, normal operation is confined to the
neighborhood of the equilibrium points; sovg is a reflection of the
nonlinear dynamics due to the operating point change, as long as the
change is slow.
253
3) Linear controller design is usually based on a nominal linear model,
either from linearization of a nonlinear model or identification from
real data. The distance between a nonlinear system and a nominal
linear system can help determine the operating range of a linear
controller designed using the nominal model.
Thus a distance measure between a nonlinear system and a nominal linear
system can determine the operating range of a linear controller designed
based on the nominal model. In contrast, a nonlinearity measure such as
vd can help determine whether a linear controller is enough forthe whole
operating range, and if not, where the operating points should be selected.
254
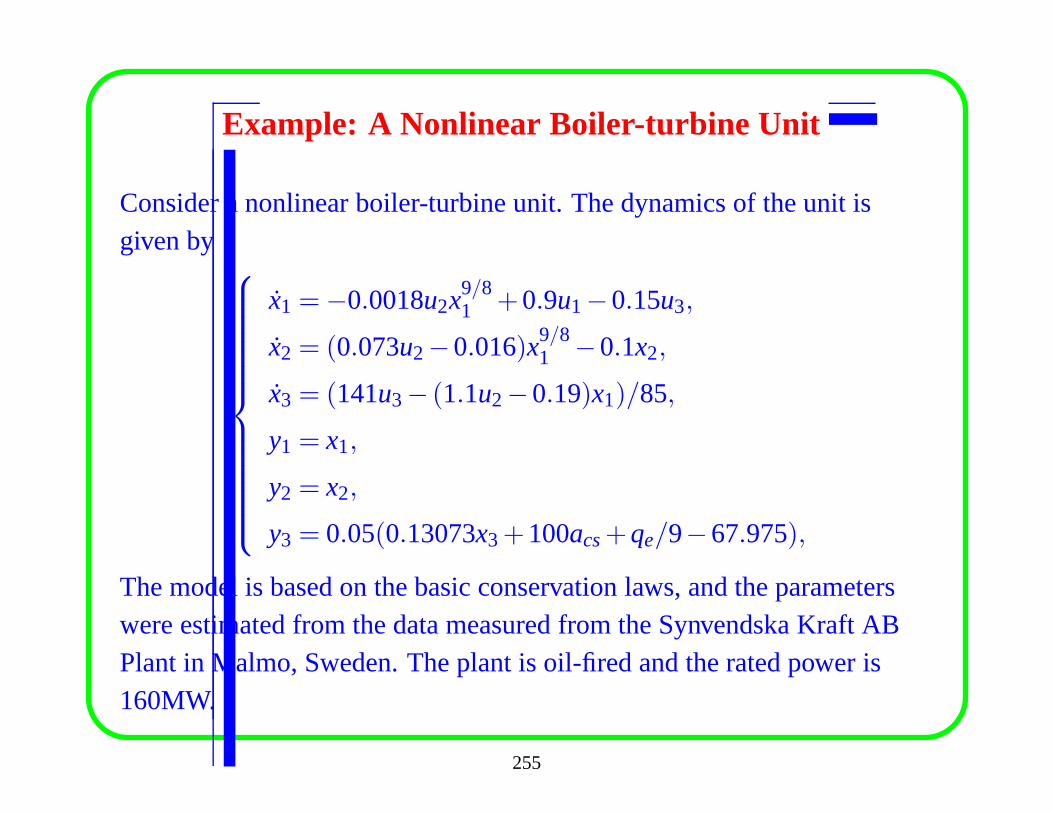
Example: A Nonlinear Boiler-turbine Unit
Consider a nonlinear boiler-turbine unit. The dynamics of the unit isgiven by
x1 =−0.0018u2x9/81 +0.9u1−0.15u3,
x2 = (0.073u2−0.016)x9/81 −0.1x2,
x3 = (141u3− (1.1u2−0.19)x1)/85,
y1 = x1,
y2 = x2,
y3 = 0.05(0.13073x3+100acs+qe/9−67.975),
The model is based on the basic conservation laws, and the parameterswere estimated from the data measured from the Synvendska Kraft ABPlant in Malmo, Sweden. The plant is oil-fired and the rated power is160MW.
255
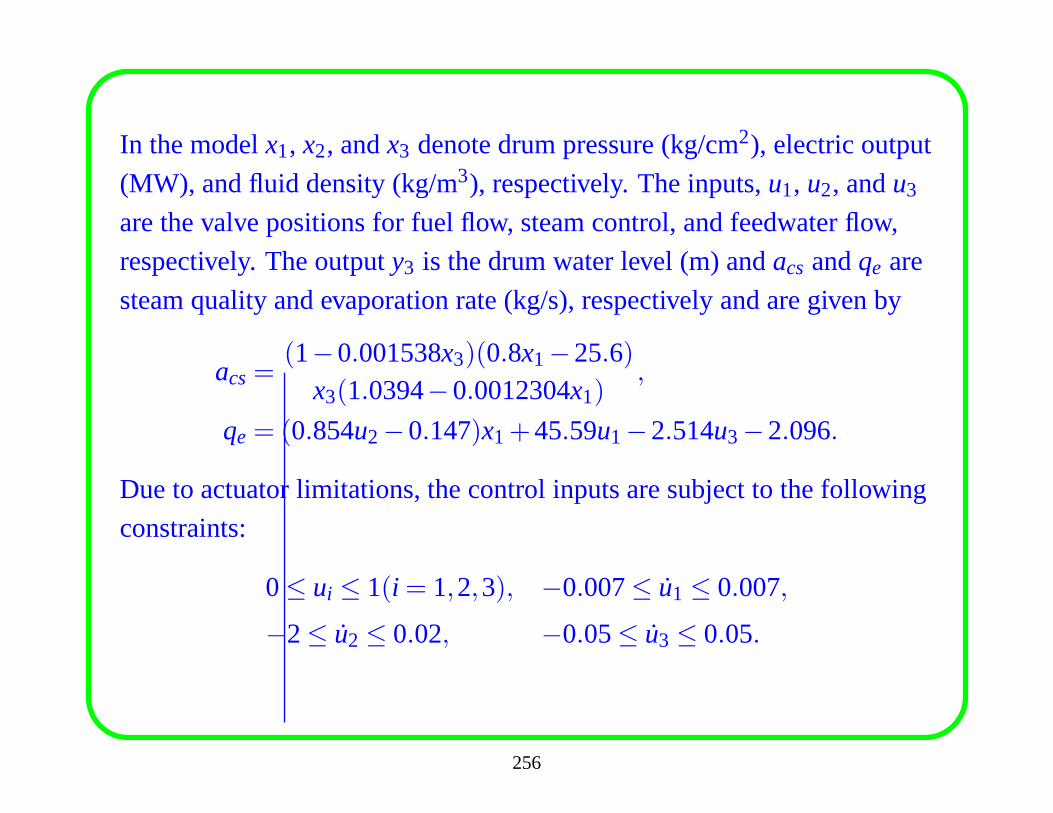
In the modelx1, x2, andx3 denote drum pressure (kg/cm2), electric output
(MW), and fluid density (kg/m3), respectively. The inputs,u1, u2, andu3
are the valve positions for fuel flow, steam control, and feedwater flow,
respectively. The outputy3 is the drum water level (m) andacs andqe are
steam quality and evaporation rate (kg/s), respectively and are given by
acs=(1−0.001538x3)(0.8x1−25.6)
x3(1.0394−0.0012304x1),
qe = (0.854u2−0.147)x1+45.59u1−2.514u3−2.096.
Due to actuator limitations, the control inputs are subjectto the following
constraints:
0≤ ui ≤ 1(i = 1,2,3), −0.007≤ u1 ≤ 0.007,
−2≤ u2 ≤ 0.02, −0.05≤ u3 ≤ 0.05.
256
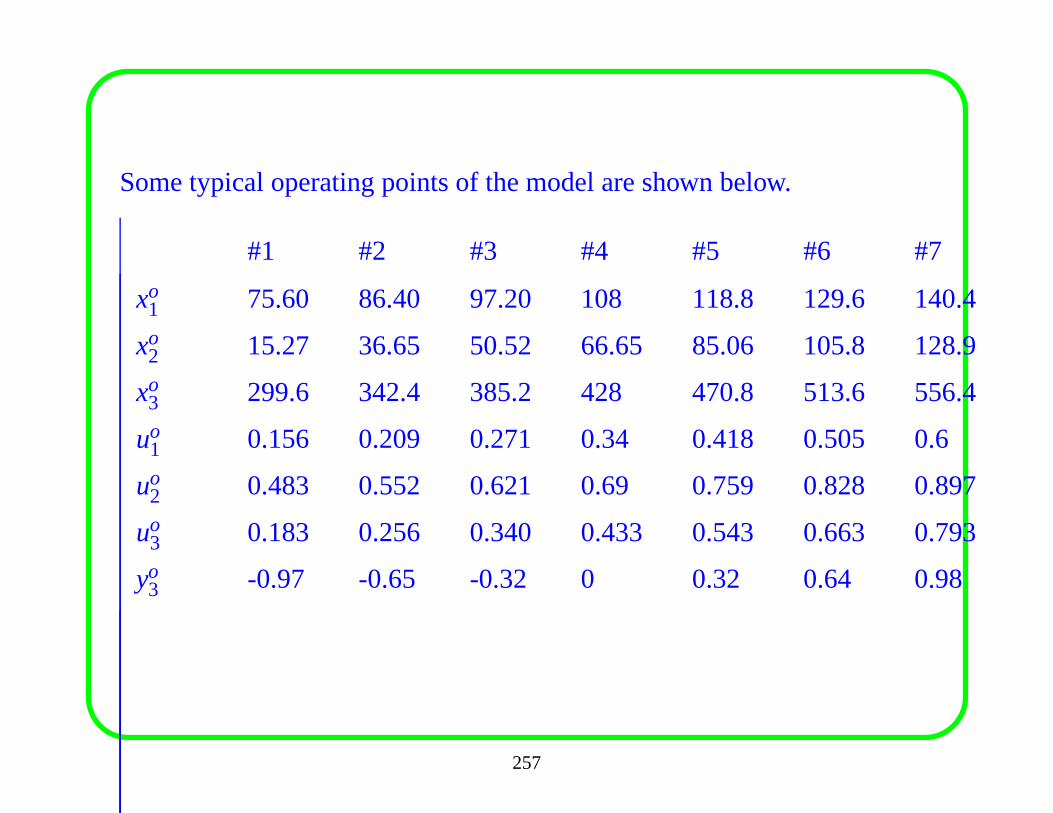
Some typical operating points of the model are shown below.
#1 #2 #3 #4 #5 #6 #7
xo1 75.60 86.40 97.20 108 118.8 129.6 140.4
xo2 15.27 36.65 50.52 66.65 85.06 105.8 128.9
xo3 299.6 342.4 385.2 428 470.8 513.6 556.4
uo1 0.156 0.209 0.271 0.34 0.418 0.505 0.6
uo2 0.483 0.552 0.621 0.69 0.759 0.828 0.897
uo3 0.183 0.256 0.340 0.433 0.543 0.663 0.793
yo3 -0.97 -0.65 -0.32 0 0.32 0.64 0.98
257
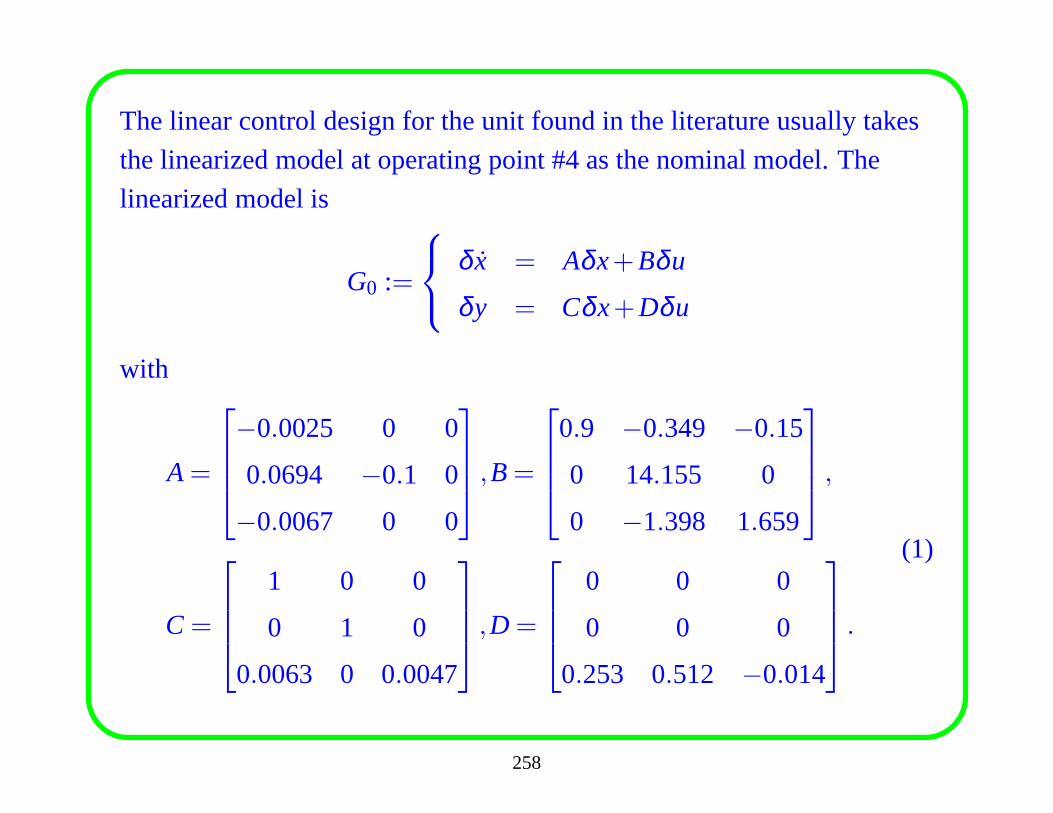
The linear control design for the unit found in the literature usually takes
the linearized model at operating point #4 as the nominal model. The
linearized model is
G0 :=
δ x = Aδx+Bδu
δy = Cδx+Dδu
with
A=
−0.0025 0 0
0.0694 −0.1 0
−0.0067 0 0
,B=
0.9 −0.349 −0.15
0 14.155 0
0 −1.398 1.659
,
C=
1 0 0
0 1 0
0.0063 0 0.0047
,D =
0 0 0
0 0 0
0.253 0.512 −0.014
.
(1)
258
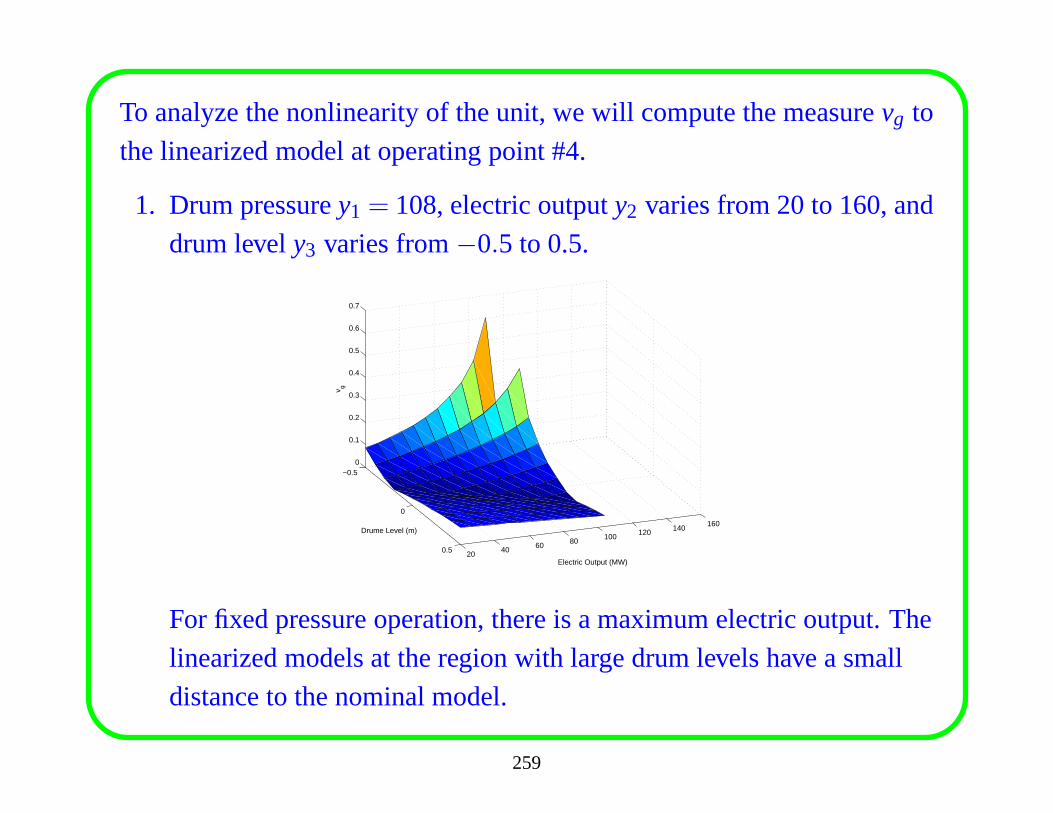
To analyze the nonlinearity of the unit, we will compute the measurevg to
the linearized model at operating point #4.
1. Drum pressurey1 = 108, electric outputy2 varies from 20 to 160, and
drum levely3 varies from−0.5 to 0.5.
−0.5
0
0.5 2040
60 80100
120 140160
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Electric Output (MW)
Drume Level (m)
v g
For fixed pressure operation, there is a maximum electric output. The
linearized models at the region with large drum levels have asmall
distance to the nominal model.
259
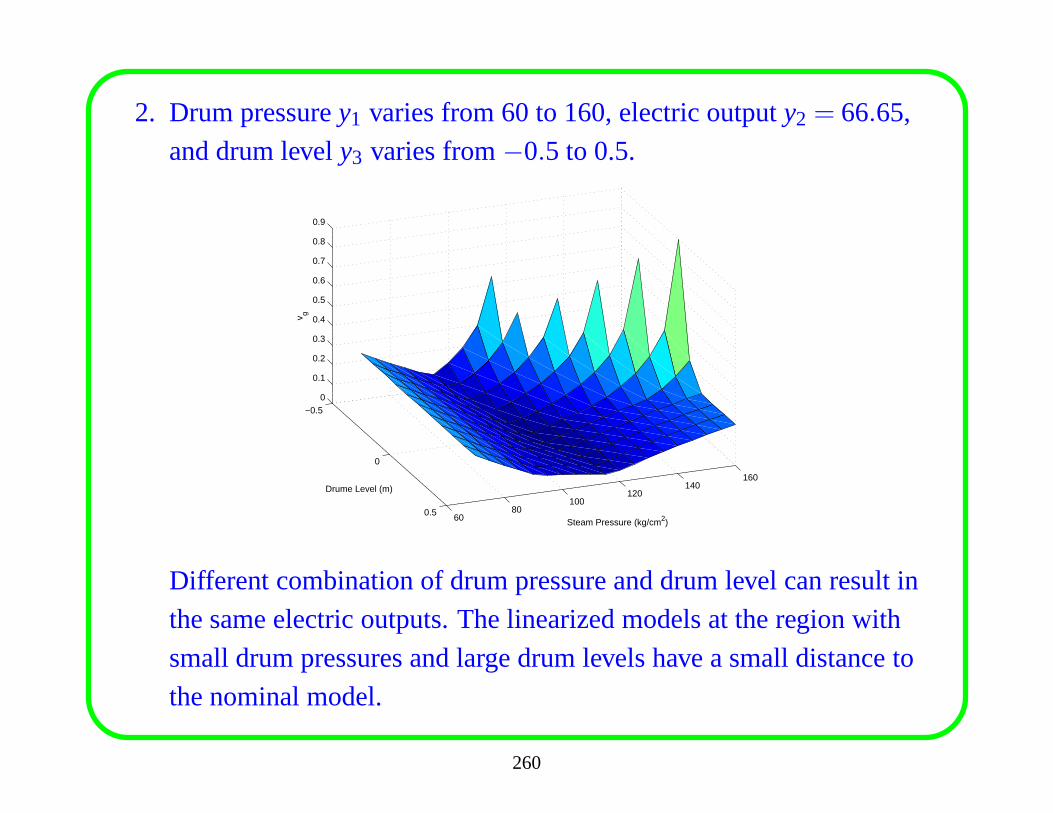
2. Drum pressurey1 varies from 60 to 160, electric outputy2 = 66.65,
and drum levely3 varies from−0.5 to 0.5.
−0.5
0
0.5 6080
100120
140160
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Steam Pressure (kg/cm2)
Drume Level (m)
v g
Different combination of drum pressure and drum level can result in
the same electric outputs. The linearized models at the region with
small drum pressures and large drum levels have a small distance to
the nominal model.
260
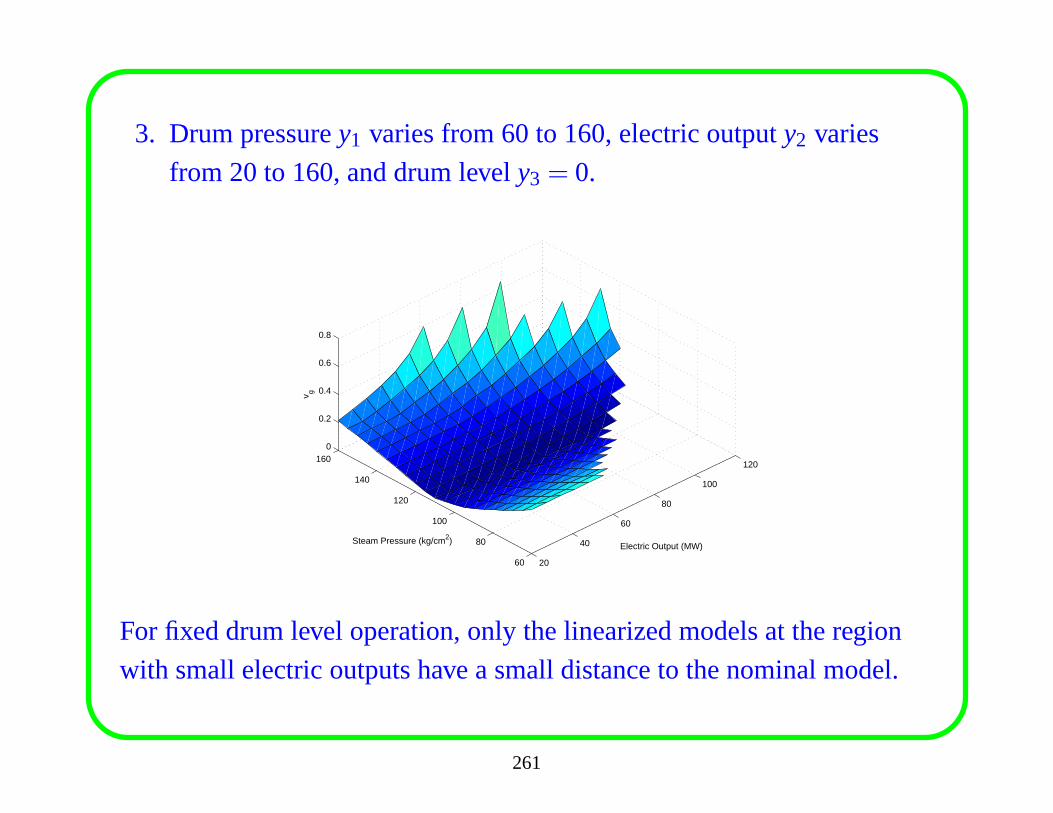
3. Drum pressurey1 varies from 60 to 160, electric outputy2 varies
from 20 to 160, and drum levely3 = 0.
20
40
60
80
100
120
60
80
100
120
140
1600
0.2
0.4
0.6
0.8
Electric Output (MW)Steam Pressure (kg/cm2)
v g
For fixed drum level operation, only the linearized models atthe region
with small electric outputs have a small distance to the nominal model.
261
It is also observed
• Larger values ofvg occur at the region with large drum pressures,
large electric outputs, and small drum levels; The maximum is about
0.9.
To evaluate the nonlinearity of the unit, we need to computevg by taking
L as linearized models at other operating points. It is found that the
maximum ofvg is always larger than 0.7, so we conclude that the Bell and
Astrom model shows severe nonlinearity.
262
8.3 Linear Control of Nonlinear Processes
If a process shows severe nonlinearity, does it mean that only nonlinearcontrollers can be used to achieve wide-range performance?The answeris NO.
In this section we will show that by careful choice of operation points thecontrol system can avoid the nonlinearity and a linear controller is enoughin the operating range.
Example: (continue)
The plots ofvg show us how to ‘avoid’ the nonlinear dynamics due to theoperating point change. Since a boiler-turbine unit must follow theelectricity demand from the grid, and the same amount of electric outputcan be obtained with different combination of drum pressureand drumlevel, the operating range of the unit should be carefully chosen.
263
For instant, if a linear controller is designed at operatingpoint #4, then we
should avoid driving the unit to operating points that have large drum
pressures, large electric outputs, and small drum levels, since at these
operating points the dynamics are quite different from the nominal one.
A good operation is to increase the drum pressure and drum level as the
electric output is increased. In this case the dynamics at the operating
region will not be far away from the nominal, thus stability of the system
can be guaranteed.
To verify the argument, we compute the gaps between the linearized
models at the typical operating points. It is clear that the gaps between
them are small, the largest being between models at operating point #1
and #7. If the nominal model is taken at #4, then as long as the designed
linear controllerK satisfiesbG,K > 0.195, then the controller can
guarantee the closed-loop stability at other operating points.
264
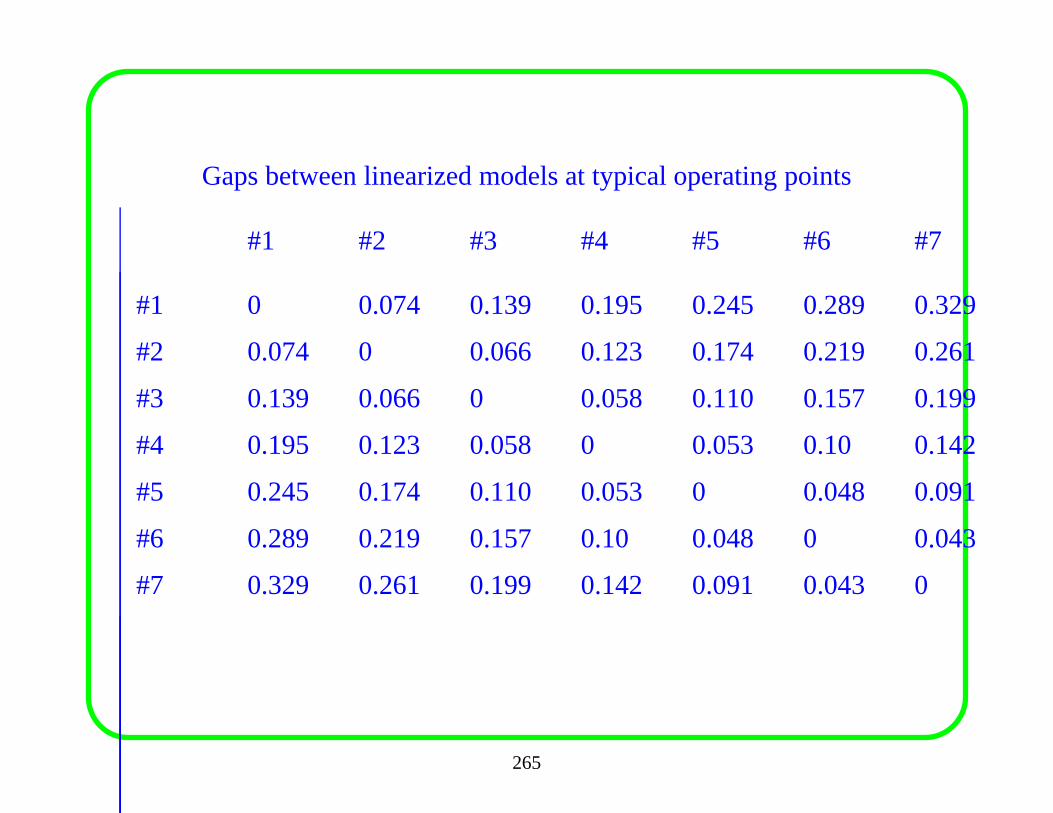
Gaps between linearized models at typical operating points
#1 #2 #3 #4 #5 #6 #7
#1 0 0.074 0.139 0.195 0.245 0.289 0.329
#2 0.074 0 0.066 0.123 0.174 0.219 0.261
#3 0.139 0.066 0 0.058 0.110 0.157 0.199
#4 0.195 0.123 0.058 0 0.053 0.10 0.142
#5 0.245 0.174 0.110 0.053 0 0.048 0.091
#6 0.289 0.219 0.157 0.10 0.048 0 0.043
#7 0.329 0.261 0.199 0.142 0.091 0.043 0
265
To show it clearly, we design a linear controller at operating point #4 via
the loop shapingH∞ approach.
The pre-compensator we select isW1 =WaWi andW2 = I3,
W1 =Wa
5+ 1s 0 0
0 1+ 1s 0
0 0 5+ 5s
whereWa is a constant that aligns the singular values of the model at
0.001 rad/s. It is effectively a constant decoupler, and given by
Wa =
0.001095 0.00373 0.02136
−0.004273 0.007065 0
−0.000374 0.00595 0.1281
.
With this pre-compensator we get anH∞ controller of order 8.
266
Since we are using weights, we need to computevgw for the model to
proceed. The procedure and the plots are similar to those in the previous
section, hence omitted here for brevity.
Considering the practical implementation issue, we simplify the final
loop-shapingH∞ controller using the PID reduction procedure. After
eliminating some small terms, we finally get the following multivariable
PI controller:
K(s) =
0.0485+ 0.0012s 0 1.2091+ 0.0486
s
0 0.0197+ 0.0045s 0
0 0 7.2548+ 0.2914s
.
267
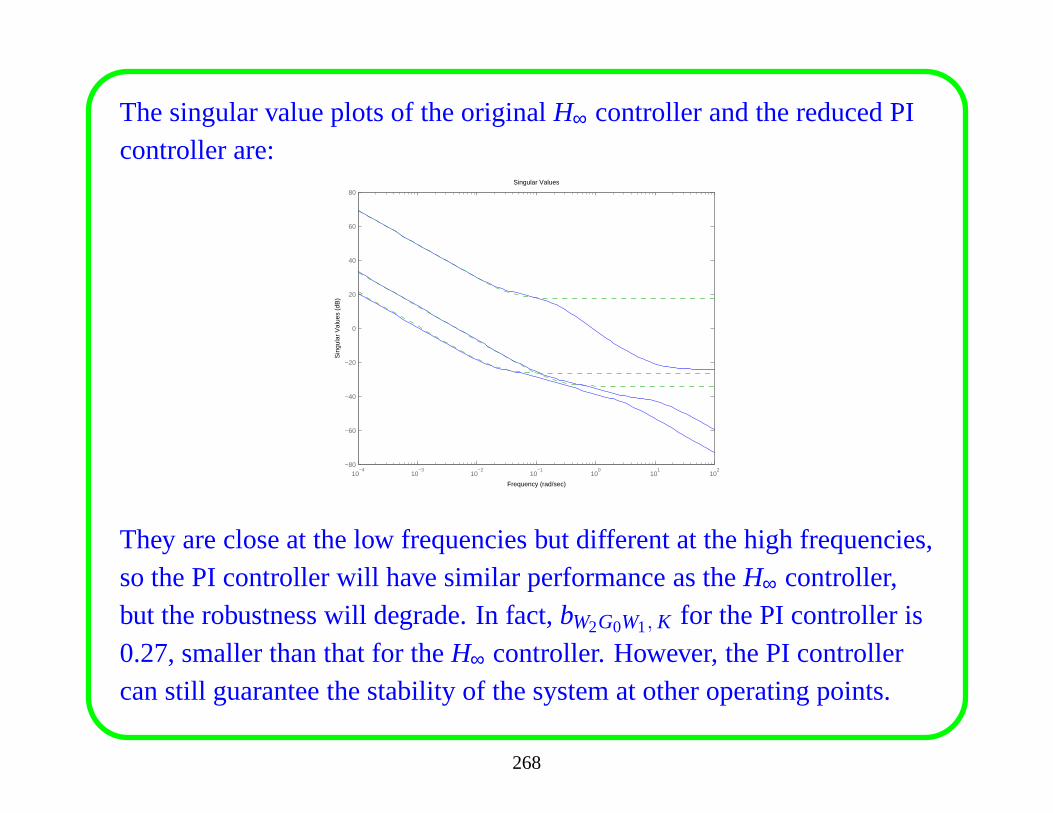
The singular value plots of the originalH∞ controller and the reduced PIcontroller are:
10−4
10−3
10−2
10−1
100
101
102
−80
−60
−40
−20
0
20
40
60
80
Singular Values
Frequency (rad/sec)
Sin
gula
r V
alue
s (d
B)
They are close at the low frequencies but different at the high frequencies,so the PI controller will have similar performance as theH∞ controller,but the robustness will degrade. In fact,bW2G0W1, K for the PI controller is0.27, smaller than that for theH∞ controller. However, the PI controllercan still guarantee the stability of the system at other operating points.
268
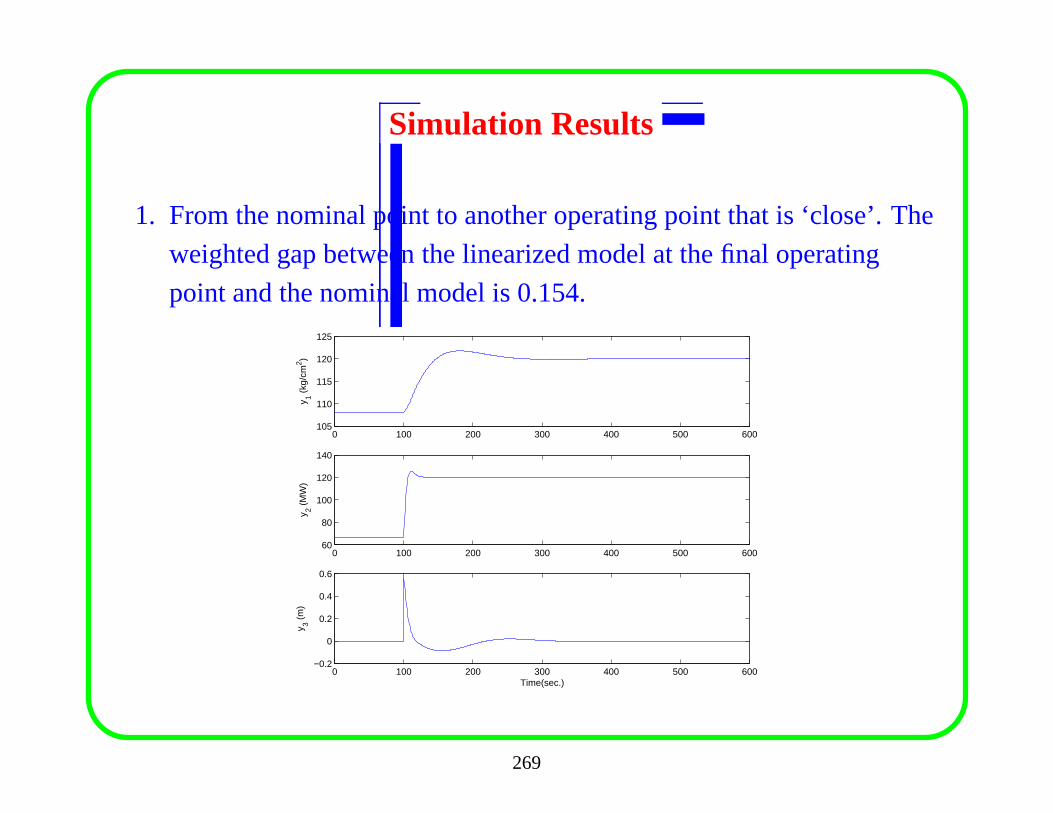
Simulation Results
1. From the nominal point to another operating point that is ‘close’. The
weighted gap between the linearized model at the final operating
point and the nominal model is 0.154.
0 100 200 300 400 500 600105
110
115
120
125
y 1 (kg
/cm
2 )
0 100 200 300 400 500 60060
80
100
120
140
y 2 (M
W)
0 100 200 300 400 500 600−0.2
0
0.2
0.4
0.6
y 3 (m
)
Time(sec.)
269
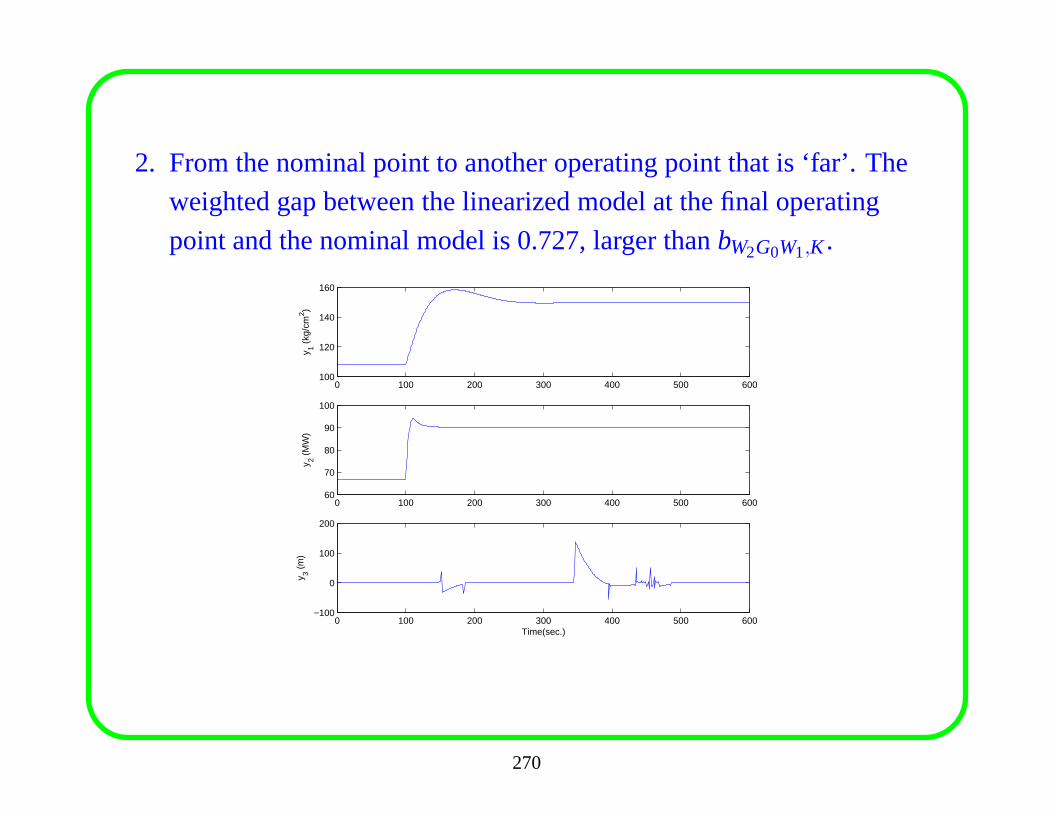
2. From the nominal point to another operating point that is ‘far’. The
weighted gap between the linearized model at the final operating
point and the nominal model is 0.727, larger thanbW2G0W1,K .
0 100 200 300 400 500 600100
120
140
160
y 1 (kg
/cm
2 )
0 100 200 300 400 500 60060
70
80
90
100
y 2 (M
W)
0 100 200 300 400 500 600−100
0
100
200
y 3 (m
)
Time(sec.)
270
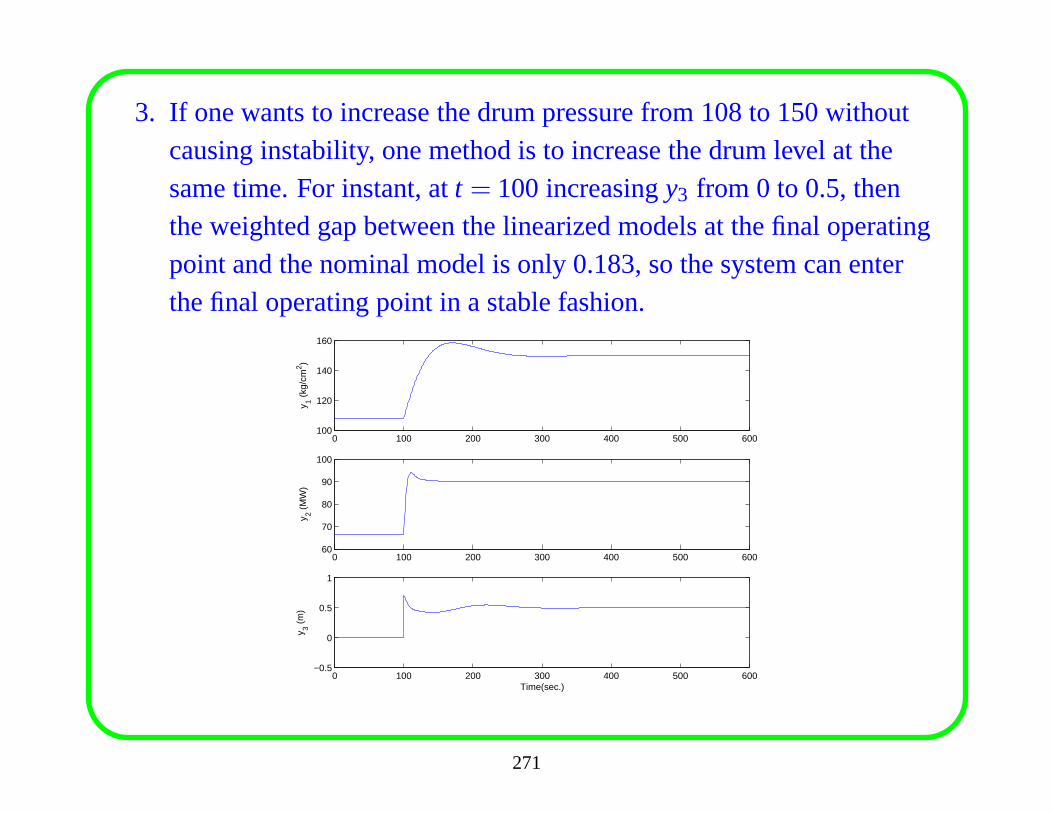
3. If one wants to increase the drum pressure from 108 to 150 withoutcausing instability, one method is to increase the drum level at thesame time. For instant, att = 100 increasingy3 from 0 to 0.5, thenthe weighted gap between the linearized models at the final operatingpoint and the nominal model is only 0.183, so the system can enterthe final operating point in a stable fashion.
0 100 200 300 400 500 600100
120
140
160
y 1 (kg
/cm
2 )
0 100 200 300 400 500 60060
70
80
90
100
y 2 (M
W)
0 100 200 300 400 500 600−0.5
0
0.5
1
y 3 (m
)
Time(sec.)
271
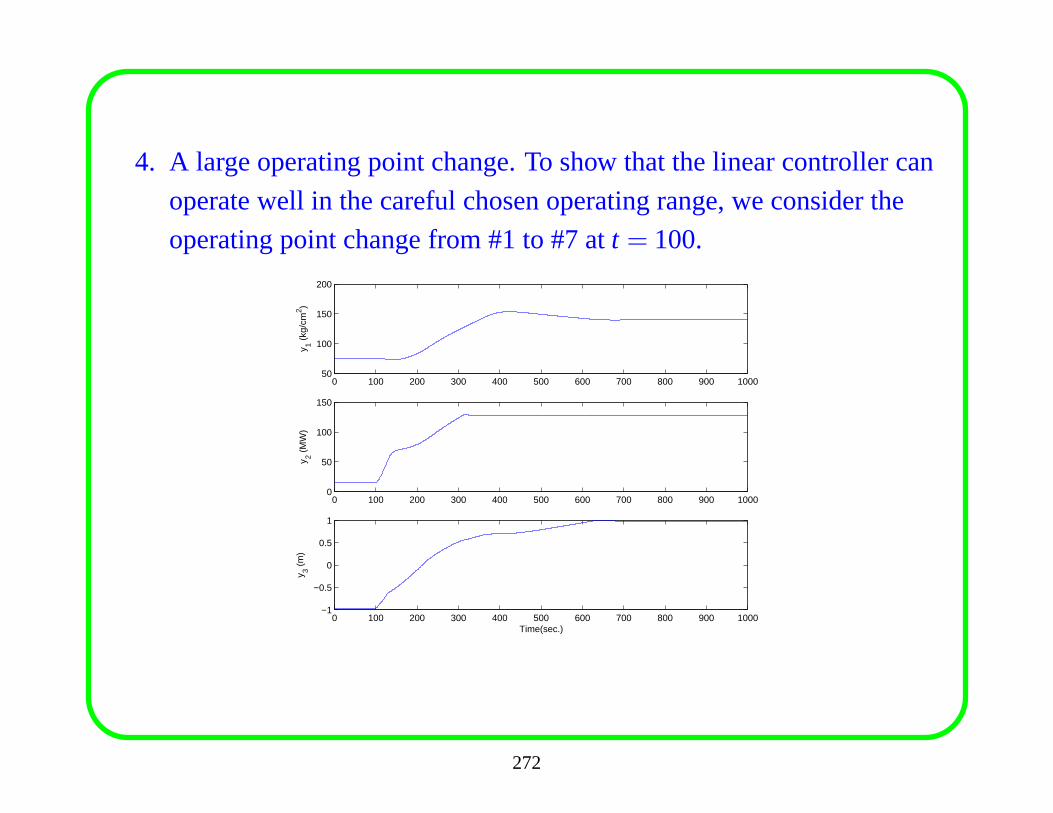
4. A large operating point change. To show that the linear controller can
operate well in the careful chosen operating range, we consider the
operating point change from #1 to #7 att = 100.
0 100 200 300 400 500 600 700 800 900 100050
100
150
200
y 1 (kg
/cm
2 )
0 100 200 300 400 500 600 700 800 900 10000
50
100
150
y 2 (M
W)
0 100 200 300 400 500 600 700 800 900 1000−1
−0.5
0
0.5
1
y 3 (m
)
Time(sec.)
272
8.4 Multimodel Control
If a single linear controller cannot achieve the performance in the desiredrange for a nonlinear system, then nonlinear strategies should beconsidered. The simplest method is the so called ’multimodel control’.The method represents the nonlinear system as a combinationof linearsystems.
Several problems are critical for multimodel control:
1) How many models are sufficient in design? Where the models shouldbe selected?
2) How to combine local controllers? Switching or weighting?
3) How to prove that the performance can be guaranteed for themultimodel controller?
These problems are not yet completely solved.
273
Selection of Operating Points
Gap metric is suggested as a guideline for selecting local models. The
idea is that the ‘distance’ of two selected models should notbe larger than
a prescribed level. Since local controller can be designed to robustly
stabilize all the models within the prescribed level, models selected in this
way can guarantee the global stability of the closed-loop systems as long
as the change of models is ‘slow’.
Theoretical background in applying the gap metric in selecting operating
points for multimodel controller design is Theorem ?. It shows that a
linear controllerK can stabilize all the linear systems that have a distance
to G less thanbG, K .
274
Suppose now a certain operating point has been selected. Thelocal model
is G and the local controller isK. Then the next operating point should be
selected at a distance (in the gap metric sense) no larger than bG, K , since
all models with a gap metric less thanbG, K to the given model can be
stabilized by the local controllerK. To have a minimal set of the
operating points, the next operating point should be selected at a distance
exactly equal tobG, K , or just a little smaller than it.
In practice, the local controller is not available before selecting the
operating points, so we can first prescribe a distance level,and then
starting from an initial operating point, compute the next operating point
till the whole range of the operating points are covered.
275
There are two drawbacks when applying the gap metric in selecting the
operating points for multimodel controller design:
1) The gap metric is only related to robust stability, that is, the local
controllerK can only guarantee that it can stabilize the models at
operating points close to the given operating point. However, stability
is not the only issue in control system design. Other performance
should also be guaranteed in selecting operating points.
2) In multimodel controller design,bG, K should be checked to make
sure it is larger than the prescribed distance level, otherwise robust
stability cannot be guaranteed.
276
Motivated by the loop shapingH∞ approach, we can include performance
weights in the gap metric computation.
Since
bopt = maxK
bG, K
Sobopt is the maximum of the robustness margin for the shaped plantG,
and we can directly obtainbopt with loop shapingH∞ design.
The gap metric between the shaped plants thus has potential applications
in selecting operating points for multimodel controller design. We
compute the distance between the shaped models instead of the original
models. Then a shaped model with a distance less thanbopt to a given
(shaped) model at one operating point can be stabilized withthe local
optimal controller and the performance can be guaranteed.
277
Multimodel Controller Design
The procedure of multimodel controller design goes as follows:
1. Compensator selection for performance. We have discussed some
guidelines in choosing the pre- and/or post-compensators to reflect
the performance requirements. However, for multimodel controller
design, we have two options in choosing the compensators:
(a) Choose a fixed set of pre- and/or post-compensators for all
operating points.
(b) Choose different sets of pre- and/or post-compensatorsat
different operating points.
278
Obviously, the first method is simple. However, due to different gains
of the models at different operating points, the resulting open-loop
shapes will certainly be different, that means at differentoperating
points the performance specifications are different, whichis
undesired.
The most desired is that at all the operating points, we specify the
same open-loop shapes. However, it is not always possible due to
system nonlinearity. Note that in process control most of the
disturbance arises at the low frequency, so we will choose sets of
compensators such that the desired open-loop shapes at all operating
points are almost the same at the low frequency, which means that the
closed-loop systems will have similar disturbance rejection ability at
all operating points.
279
2. Local controller design. It is a standard practice to design such loop
shaping controllers. One thing to remember is to check whether the
designedbG,K is actually less thanbopt, otherwise the operating
points selected are not appropriate and new operating points needed
to be re-selected.
3. Constructing the multimodel controller. Once local controllers are
designed, we can form the global controller by switching, orusing
weights (fuzzy logic). We will use membership functions to create a
transition region according to the operating pointz,
u(t) =k
∑i=1
ui(t)ρi(z)
wherek is the number of operating points,ui(t) is the output of the
ith local controller, andρi(z) is the membership function of theith
local controller.
280
Example
Consider the following two-input-two-output (TITO) process
x1 = x2−u1
x2 = (4.75−4.5x1)u2−0.7(x2−u1)−0.25x1
y1 = x1
y2 = x2
.
In a previous literature, five operating points were used to design a
multimodel controller.
281
With the pre-compensator
W1 = G(0)−1
3+1/s 0
0 2+4/s
and the post-compensatorW2 = I , we find that only two operating points
are needed. HereG(0) denotes the dc gain of the local model, which
serves as a static decoupler. The two operating points correspond to
#1. x10 = 0.679,x20 = 0,u10 = 0,u20 = 0.1;
#2. x10 = 0.950,x20 = 0,u10 = 0,u20 = 0.5.
282
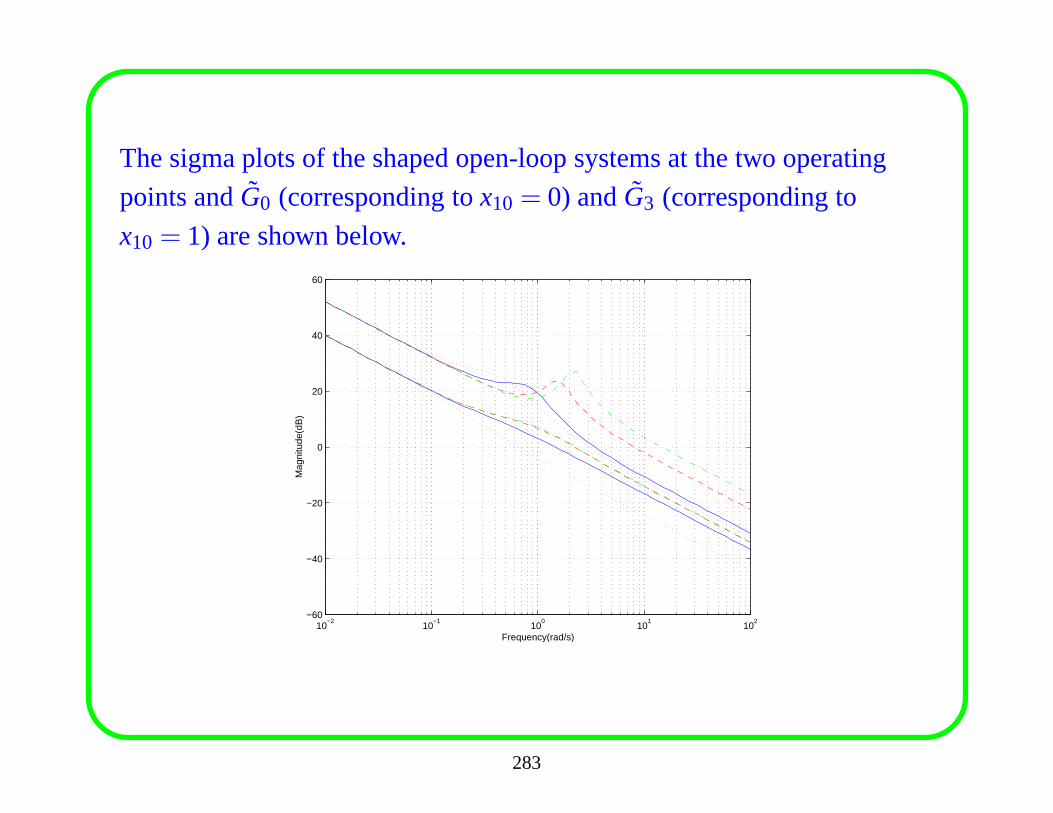
The sigma plots of the shaped open-loop systems at the two operating
points andG0 (corresponding tox10 = 0) andG3 (corresponding to
x10 = 1) are shown below.
10−2
10−1
100
101
102
−60
−40
−20
0
20
40
60
Frequency(rad/s)
Mag
nitu
de(d
B)
283
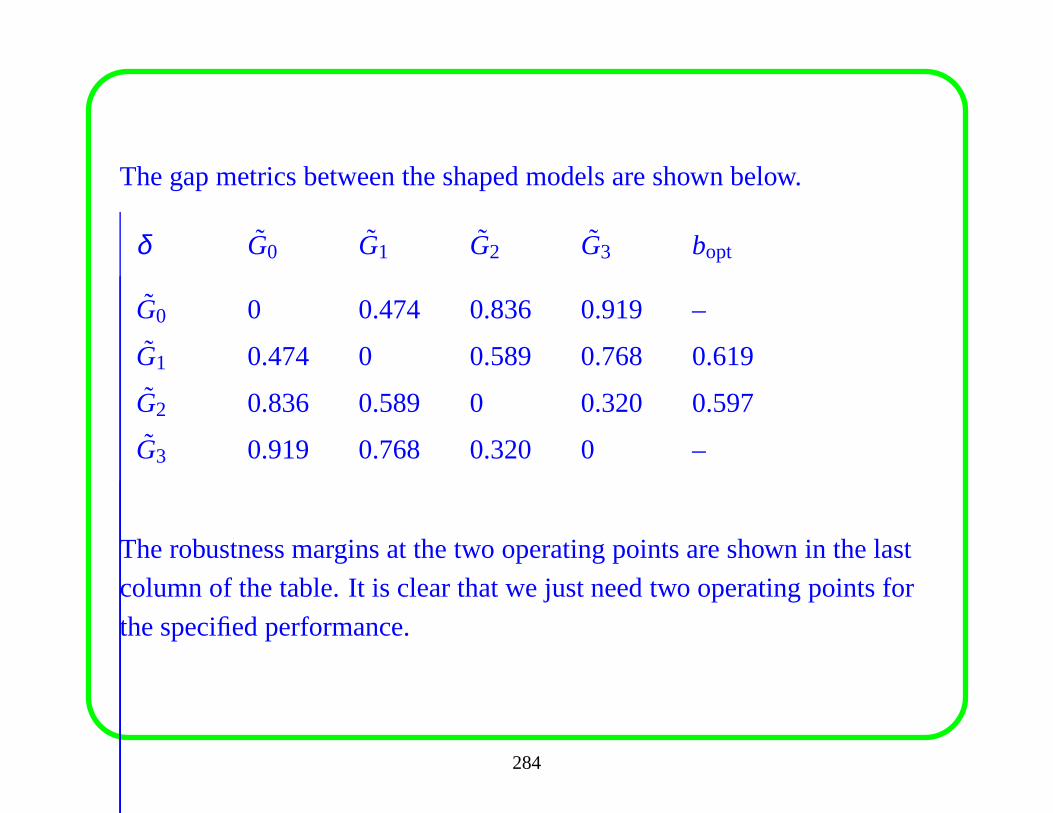
The gap metrics between the shaped models are shown below.
δ G0 G1 G2 G3 bopt
G0 0 0.474 0.836 0.919 –
G1 0.474 0 0.589 0.768 0.619
G2 0.836 0.589 0 0.320 0.597
G3 0.919 0.768 0.320 0 –
The robustness margins at the two operating points are shownin the last
column of the table. It is clear that we just need two operating points for
the specified performance.
284
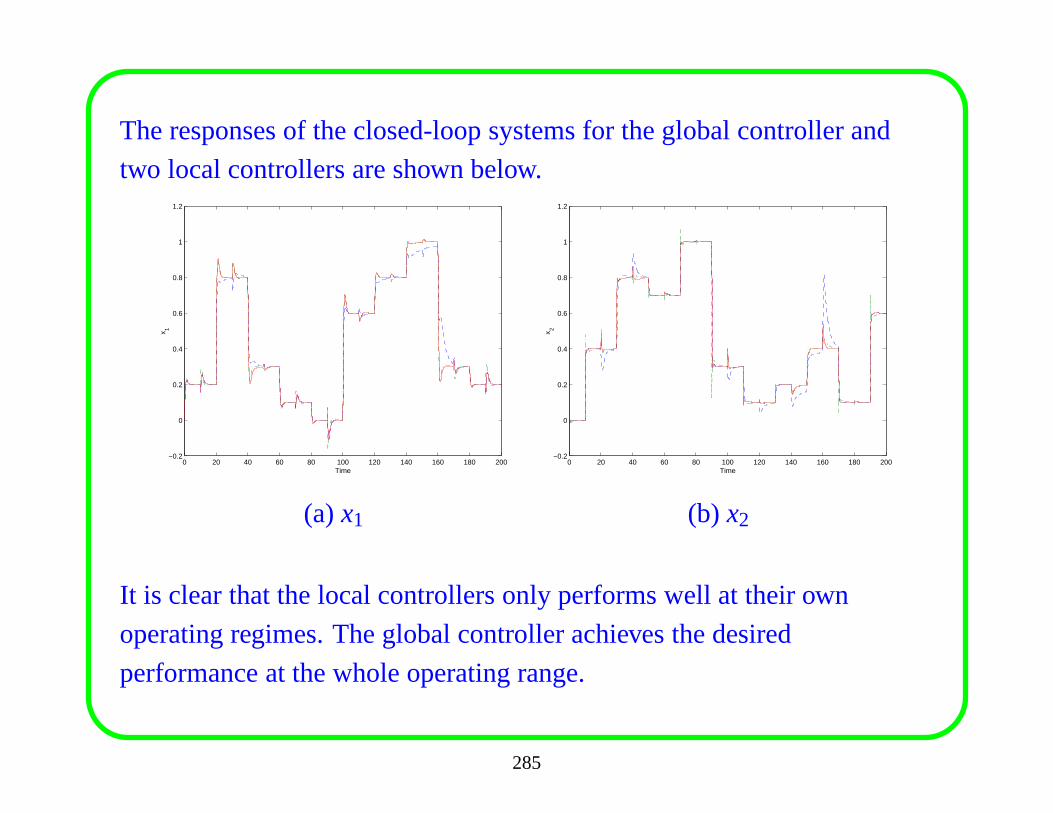
The responses of the closed-loop systems for the global controller and
two local controllers are shown below.
0 20 40 60 80 100 120 140 160 180 200−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Time
x 1
0 20 40 60 80 100 120 140 160 180 200−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Time
x 2
(a) x1 (b) x2
It is clear that the local controllers only performs well at their own
operating regimes. The global controller achieves the desired
performance at the whole operating range.
285


















