
Robust Control 2 - Drexel Universityhgk22/courses/MEM633_635/Robust Control Part 2.pdf · Robust...
40
10/26/2004 Robust Control 2 Controllability, Observability & Transfer Functions Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University
Transcript of Robust Control 2 - Drexel Universityhgk22/courses/MEM633_635/Robust Control Part 2.pdf · Robust...
10/26/2004
Robust Control 2Controllability, Observability & Transfer Functions
Harry G. KwatnyDepartment of Mechanical Engineering & MechanicsDrexel University

Outline• Reachable• Controllability• Distinguishable• Observability• Zeros• Transfer Functions• Poles• Interconnections• Stability
System
0 00
, ,n m p
tAt A(t-s)
x Ax Buy Cxx R u R y R
x(t; x ,u) e x e Bu(s)ds
= +=
∈ ∈ ∈
= + ∫

Reachability
( )
1 0
0 1 0
0
A state is from if there exists a finite time 0 and a piecewise continuous control
such that . denotes the set of states reachabl
reachab
efrom .
le
Definition: nx R xt
u x(t; x ,u) x xx
∈
>
= R

Reachability: Properties
( )
( )
111 1
1 1
1 11 1
1 0 1
0 0
0
If is reachable from in some time >0, it is reachable in every time . To see this simply rescale :
Thus, we h
stt
stt
t tA(t - )A(t -s) st st
t t
tA(t- ) A(t -t) st st
t t
x x tt s
e Bu(s)ds e Bu( )d
e Be u( )d
=
=
∫ ∫
∫1
1
1 0 1 0
1 0 10
ave the replacement ( ) .______________________
Notice that is reachable from if and only if is reachable from the origin for any 0
A(t -t) stt
At
tAt A(t-s)
u s e u( )
x x x e xt
x e x e Bu(s)ds x
→
−< < ∞
= + ⇔ −∫ 00
tAt A(t-s)e x e Bu(s)ds= ∫
Some Geometry, 1
{ }
1 2
1 2
1 2
2
2 1
Consider two linear vector spaces , with inner products, and , ,respectively, and a mapping
:- the range or image ( Im ) of is the set of points in
,
- the null space or ker
X X
A X XA X
y X y Ax x X
→
∈ = ∈
{ }1
1
*2 1
*2 1
nel ( ker ) of is the set of points in
0
- the adjoint mapping : is defined by
, ,
A X
x X Ax
A X X
y Ax A y x
∈ =
→
=
Some Geometry, 2
( )
( )
*
** *
* *
1
If then is called self-adjoint
It is always true that and
If then is called normalThe following decompositions of finite dimensionallinear vector spaces are true:
ker Im
A A A
A A A A
A A AA A
X A
=
= =
=
= ⊕ ( )( ) ( )
( ) ( )
*
*2
*
ker Im
These are orthogonal decompositions, i.e.,
ker , Im , 0
A
X A A
x A y A x y
= ⊕
∈ ∈ ⇒ =
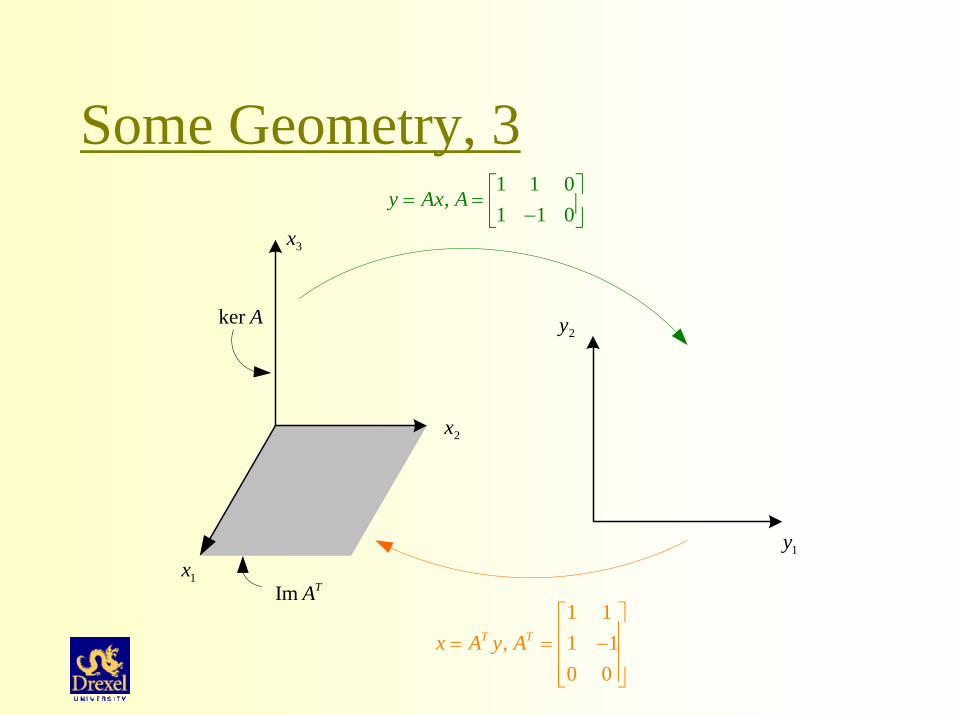
Some Geometry, 31 1 0
,1 1 0
y Ax A ⎡ ⎤= = ⎢ ⎥−⎣ ⎦
1y
2y
1x
2x
3x
1 1, 1 1
0 0
T Tx A y A⎡ ⎤⎢ ⎥= = −⎢ ⎥⎢ ⎥⎣ ⎦
Im TA
ker A

Reachability Condition
( )
( )
11
1
1
( )1 0
* *1 1 1
Let denote the linear vector space of control functions ( ), [0, ],
and the space of states . The map : is defined by
( ) (
0 Im Im note :
)
Proposit
n
t A t
x x
u t
R x t
x t e Bu d
x
τ
τ τ
τ τ−
∈ ⇔ ∈ ⇔
=
→
≅ →
∈
∈
∫
R A A
U
X A
A AA X
U
X
X
[ ]1
1 1
1
( ) ( )*
0
The set of states reachable from the origin over the time interval 0, is
Im Im
ion:
Tt A t A tT
t
e BB e dτ τ τ− −⎡ ⎤= ⎢ ⎥⎣ ⎦∫AA

Controllability
1
0
The system or the matrix pair ( , ) is said to be (completely) controllable if any state is reachable from any other state in finite time.
The system is completely contro
Definition:
Proposition:
A Bx
x
11 1
1
( ) ( )1 0
llable if an
controllability G
d only if
rank ( )where
( )
is th rammiane .
T
C
t A t A tTC
G t n
G t e BB e dτ τ τ− −
=
= ∫
Controllability Main Result
( )
1 1
: Im( )
| : Im
0Theorem:
n n
B
A A A B AB A B
A
− −
=
⎡ ⎤= + + + = ⎣ ⎦=
B
B B B B
BR
…
1( ) 11 1
1 1
If the system is completely controllable there is a unique control
( ) ( )that steers the origin to in precisely time .
TA t tTCu t B e G t x
x t
− −=

Distinguishable
( )
1 0
1 2 0
0
A state is indistinguishable from if for every finite time and piecewise continuous control
( ), ( ; , ) ( ; , ). denotes the set of statesindistinguishable from .
:
Definition: nx R xt
u t y t x u y t x u xx
∈
= I
N ( )1
11
ker ker
(0)Theorem:
ni
in
CCA
CA
CA
−
=−
⎡ ⎤⎢ ⎥⎢ ⎥= =⎢ ⎥⎢ ⎥⎣ ⎦
=I N
∩

Observability The system or the matrix pair ( , ) is said
to be if knowledge of ( ) and ( ) on a finite time interval determines the sta
(completely) obte trajectory o
servablen
that interval.
Definition:
Theorem:
C Au t y t
1
(completely) observ
The system or the matrix pair ( , ) is if and only if (0) , i.e.
r
e
ank
abl
n
C A
CCA
n
CA −
= ∅
⎡ ⎤⎢ ⎥⎢ ⎥ =⎢ ⎥⎢ ⎥⎣ ⎦
I

Summary: Controllability/Observability1
1
1 11 12 13 14 1
2 22 24 2
3 33 34 3
4 44 4
Controllability rank
Observability rank
Kalman Decomposition, such that
0 00 00 0 0
nB AB A B n
CCA
n
CAx z
z A A A A zz A A zdz A A zdtz A z
−
−
⎡ ⎤⇔ =⎣ ⎦⎡ ⎤⎢ ⎥⎢ ⎥⇔ =⎢ ⎥⎢ ⎥⎣ ⎦
⎡ ⎤ ⎡ ⎤ ⎡⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥ ⎢=⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎦ ⎣ ⎦ ⎣
[ ]11
222 4
3
4
1 2 2 4
, 0 000
, controllable , observable
zBzB
u y C Czz
z z z z
⎤ ⎡ ⎤⎡ ⎤⎥ ⎢ ⎥⎢ ⎥⎥ ⎢ ⎥⎢ ⎥+ =⎥ ⎢ ⎥⎢ ⎥⎥ ⎢ ⎥⎢ ⎥⎥ ⎢ ⎥⎣ ⎦⎦ ⎣ ⎦
Notice that the substate z2 is both controllable and
observable

Example
[ ]
[ ]
( ) [ ] [ ] ( )( )( )
( )( )
1
2 2 1, 1 0
0 4 1
1 41 4
4 210 2
1 012 4
2 12 4 4
x x u y x
B AB
ss
G s C sI A Bs s
ss s s
−
− −⎡ ⎤ ⎡ ⎤= + =⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦
−⎡ ⎤= = ⎢ ⎥−⎣ ⎦
+ −⎡ ⎤⎢ ⎥+ ⎡ ⎤⎣ ⎦= − = ⎢ ⎥+ + ⎣ ⎦
+= =
+ + +
C

Some MATLAB FunctionsFunctioncanon canonical stste-space realizations
ctrb controllability matrix
ctrbf controllability staircase form
gram controllability and observability gramians
obsv observability matrix
obsvf observability staircase form
ss2ss state coordinate transformation
ssbal diagonal balancing of state-space realizations
minreal returns a minimal realization

Example, Continued>> tf(sys)Transfer function:
s + 2-------------s^2 + 6 s + 8>> tf(minreal(sys))1 state removed.Transfer function:1
-----s + 4
>> A=[-2 -2;0,-4];>> B=[1;1];>> C=[1 0];>> sys=ss(A,B,C,0);>> ctrb(sys)ans =
1 -41 -4
>> gram(sys,'c')ans =
0.1250 0.12500.1250 0.1250

System Poles & Zeros
( ) [ ] 1
Two descriptions of linear time-invariant systemsstate space and transfer function.
Assumption: is a complete characterization of , , , or, equivalently, , , , is a
x Ax BuG s C sI A B D
y Cx DuG A B C D
A B C D
−= +⇔ = − +
= +
the poles of are the eigenvalues of
minimal realization of .Defining poles via state space is very easy:
.Defining zeros is more complicated. We do it via state spacein the followin .
g
GG
A
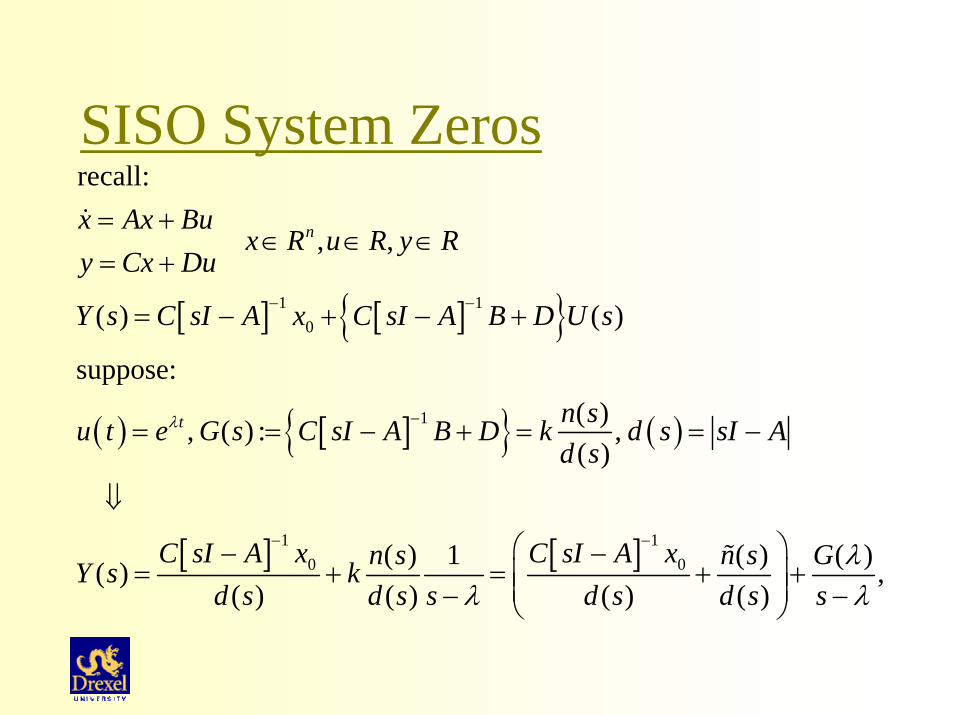
SISO System Zeros
[ ] [ ]{ }
( ) [ ]{ } ( )
[ ] [ ]
1 10
1
1 10 0
recall:
, ,
( ) ( )
suppose:( ), ( ) : ,( )
( ) 1 ( ) ( )( ) ,( ) ( ) ( ) ( )
n
t
x Ax Bux R u R y R
y Cx Du
Y s C sI A x C sI A B D U s
n su t e G s C sI A B D k d s sI Ad s
C sI A x C sI A xn s n s GY s kd s d s s d s d s s
λ
λλ λ
− −
−
− −
= +∈ ∈ ∈
= +
= − + − +
= = − + = = −
⇓
⎞⎛− −= + = + +⎟⎜⎜ ⎟− −⎝ ⎠

SISO System Zeros, Cont’d
[ ]
( ) ( ) ( ) ( )
( )
0
0
0 0
1
0
can always be chosen so that
( ) 0( ) ( )
in which case
( ) , if is a ze
In summary:if is a
ro of , then 0, 0
system zero, there exists such that
and ( )
x
C sI A x n sd s d
x
x t
s
GY s G s y t
s
u t
Y
x
λλ λ
λ
λ
− ⎞⎛ −+ ≡⎟⎜⎜ ⎟
=
=
⎝ ⎠
= =−
( ) 0
te y tλ= ⇒ ≡

MIMO System Zeros
0
0
0 0 0
0
, ,
Does there exist and such that
( ) ( ) and ( ) 0?The assumed solution must satisfy
00
n m p
m n
t t
t t t
t t
x Ax Bux R u R y R
y Cx Dug R x R
u t ge x t x e y t
x e Ax e Bge I A B xC D gCx e Dge
λ λ
λ λ λ
λ λ
λ λ
= +∈ ∈ ∈
= +
∈ ∈
= ⇒ = ≡
= + − −⎡ ⎤ ⎡ ⎤⇒ =⎢ ⎥ ⎢ ⎥−= + ⎣ ⎦ ⎣ ⎦
MIMO System Zeros, Cont’d
max
max
max
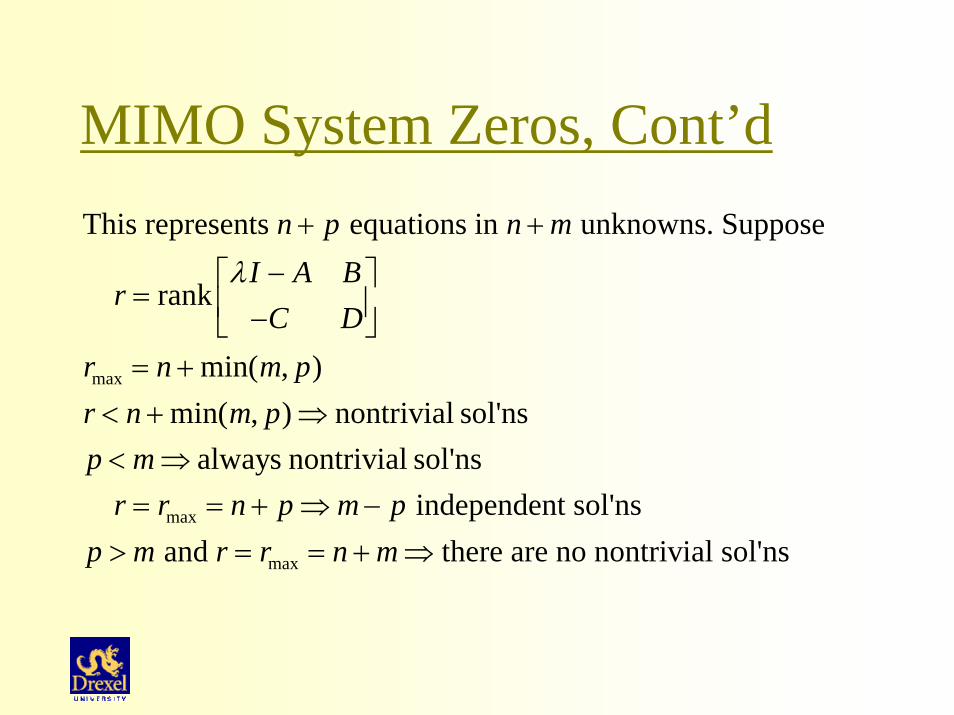
This represents equations in unknowns. Suppose
rank
min( , )min( , ) nontrivial sol'ns
always nontrivial sol'ns independent sol'ns
and ther
n p n mI A B
rC D
r n m pr n m pp m
r r n p m pp m r r n m
λ+ +
−⎡ ⎤= ⎢ ⎥−⎣ ⎦= +
< + ⇒< ⇒= = + ⇒ −
> = = + ⇒ e are no nontrivial sol'ns

Square MIMO Systems (p=m) If for typical ,
rank
Those specific values of forinva
which are called. Invariant zeros consist of
(uncontrollable mor
Nondegenerate case:
iant zerosinput decoupling zeros
I A Br n m
C Dr n m
λλ
λ
−⎡ ⎤= = +⎢ ⎥−⎣ ⎦
< +
•
[ ]des), satisfies
rank (unobservable modes), satisfies
rank
, all other invariant
output decoupling zeros
transmission zeros zeros.
I A B n
I An
C
λλ
λλ
− <
•
−⎡ ⎤<⎢ ⎥
⎣ ⎦•

Square MIMO Systems, Cont’d
( )
For typical ,
rank
0
insufficient independent controls, rank insufficient independent outputs,
degenerate case
rank
:I A B
r n mC D
G
B mC p
λλ
λ
−⎡ ⎤= < +⎢ ⎥−⎣ ⎦
≡
• <• <

Transfer Functions
( ) [ ] [ ]1 12 2 2
2 2 2
, ,
where , , are those of the Kalman decomposition -,i.e., parameters of a minimal realization.So, only the controllable and observable part of the s
n m px Ax Bux R u R y R
y Cx
G s C sI A B C sI A BA B C
− −
= +∈ ∈ ∈
=
= − = −
( )Definition: complete characterizati
ystemis characterized by its transfer function.
is called a of the system if the system is completely observable and controlla e
onbl .
G s

10/26/2004
Poles & Zeros from Transfer Functions

Numbers: Prime & CoprimeA (or integer) is a positive integer 1 that has nopositive integer divisors other than 1 and itself.
Two integers are relatively prime or if they share no pos
prime number
coprime itiveinteger factors
p >
( )
(divisors) other than 1 - i.e., their greatest common divisor is 1.
If and are integers not both zero, then thereexist integers and such thaBezout's iden
t,
If and are cop
tity
i
:
r
a bx y
GCD a b ax bya b
= +
me then there exist integers and such that1
x yax by= +
Polynomials
( )( )
11 0
11 0
These ideas have been extended to polynomials, matrices with polynomial elements matrices with rational elementsTwo polynomials
, 0
, 0are coprime if
m mm m m
nn n n
n s a s a s a a
d s b s b s b b
−−
−−
= + + + ≠
= + + + ≠
their greatest common divisor isa nonzero constant, i.e., they have no common factors.

Example
F1 = s4 + 2s3 + s + 2 = (s + 1) (s + 2) (s2 - s + 1) F2 = s5 + s4 + 2s3 + 3s2 + 3s + 2 = (s + 1) (s2 - s + 2) (s2 + s + 1)
gcd(F1,F2) = (s + 1)
Bezout relation: (5/24s3 + 1/12s2 + 1/4s + 5/24) F1 + (-5/24s2 - 7/24s + 7/24) F2
= s + 1

Polynomial Matrices
( )( )
( )( ) ( ) ( ) ( ) ( ) ( )( ) ( )
11 0 , ,
11 0
,right common d
Two matrix polynomials
,
have a if
,
, are if the only right common
divisors are unim
ivisor
right coprime
A B
m mm m p q p q
i inn n
q q
N s A s A s AA R B R
D s B s B s B
R s R
N s N s R s D s D s R s
N s D s
−−
−−
= + + +∈ ∈
= + + +
∈
= =
( )odular, i.e., det 0.Similary, left coprimeness can be defined for polynomialmatrices with the same number of rows.
R s c= ≠

Poles( )
( )( ) ( ) ( ) ( ) ( )1 1
Suppose the transfer matrix is a complete characterization of,
can always be factored into
where , and , are coprime pairs of polynomial matrices. l l r r
l l r r
q m G sx Ax Bu y Cx Du
G s
G s D s N s N s D sD N D N N
− −
×
= + = +
= =
[ ] ( )
[ ] ( )
1 2 1 2
, and , are called numerator, denominator matrices, respectively.
det det (Definition: Pol
) det , are constants. are the roots of:
det 0, or det
Theore
( ) 0, or det
m
0e
:s
r l
r r
l r
l r
ND D
sI A D s D s
sI A D s D s
α α α α− = =
− = = =
Poles & Zeros from Transfer FunctionsAssume G(s) is a complete characterization.Theorem: The pole polynomial ∆(s) is the least
common denominator of all non-identically-zero minors of all orders of G(s).
Theorem: The zero polynomial is the greatest common divisor of all numerators of all order-rminors of G(s), where r is the generic rank of G(s), provided that these minors have been adjusted to have ∆(s) as there denominator.

Recall a minor of a matrix is the determinant of a matrix obtained by deleting rows and columns.Example
( ) ( )
( )
Consider the transfer function:1 41
4.5 2 12To determine poles we need all minors of all orders.The 4 minors of order 1 are
1 4 4.5 1, , ,22 2 2 2
rank =2.
The single minor of order 2 i
sG s
ss
s ss s s s
G s
−⎡ ⎤= ⎢ ⎥−+ ⎣ ⎦
− −+ + + +
( ) ( )( )( )
4s det 22
pole polynomial: 2
zero polynomial: 4
sG ss
s s
z s s
φ
−=
+
= +
= −
10/26/2004
Multivariable Interconnections & Feedback Loops

Well-Posed Loops: Example( )G s
( )
( ) ( ) ( )
[ ]( ) ( )
1
1
11
1 21 1
1 11
Let , be proper rational transfer matrices.Then
is proper and rational iff is nonsin
T
gula
he
r
m:
.
ore
cl
cl
sG ss
s ss s
G s G s I G ss
G H
G G I HG
I H G
−
−
⎡ ⎤−⎢ ⎥= ⎢ ⎥
− −⎢ ⎥⎢ ⎥+ +⎣ ⎦
− + − −⎡ ⎤= + =⎡ ⎤ ⎢ ⎥⎣ ⎦ −⎣ ⎦
= +
+ ∞ ∞

Poles of Closed Loops( )G s
( )H s
[ ]
[ ]
1
It might be anticipated that the poles of arethe roots of det . Not True!!
cl
cl
G G I HGG
I HG
−= +
+
( ) ( )
( ) [ ]
21 1 ,
211
21 1 , det 1
211
obviously, has poles at 1.
cl
s ss sG s H s I
ss s
s sG s I HGss
s
−⎡ ⎤⎢ ⎥− += = ⇒⎢ ⎥
−⎢ ⎥⎢ ⎥+⎣ ⎦
−⎡ ⎤⎢ ⎥+ += + ≡ −⎢ ⎥
−⎢ ⎥−⎢ ⎥−⎣ ⎦= ±

Poles, Cont’d
( ) ( )
( ) ( ) ( ) ( ) ( )
( )( )( ) ( )
( )( ) ( )
If , are proper, reational matrices and
det 0, then the poles of are the
roots of the polyn
Example:1 1
0.5 1.5 0.
omial
d
Theor
e
50.5 1
0.5 1.5 .5
e :
0
t
m
cl
G H
G H
I H G G
s s s
s s sG s
ss s s
I H s G s
+ ∞ ∞ ≠⎡ ⎤⎣ ⎦
∆ = ∆ ∆ +⎡ ⎤⎣
⎡ ⎤⎢ − + −⎢=⎢ +
− +⎣
⎦
⎢ −⎢ ⎦
2, H I⎥⎥ =⎥⎥⎥

Poles: Example Cont’d( )
( ) ( )( ) ( ) ( ) ( )( )
( )( )
( ) ( )
( )( )1
0.5det0.5
1.5 0.5 , 1 1.5 0.5
100.5
1 11.5 1.5
0 1.5 1 01.5 0.5
0.5 0.5 0 1
G H
cl
sI G ss
s s s s s s s
sG s
s s
ss s
s s
−
++ =⎡ ⎤⎣ ⎦ −
∆ = + − ∆ = ⇒ ∆ = + +
⎡ ⎤⎢ ⎥−⎢ ⎥=⎢ ⎥⎢ ⎥+ +⎢ ⎥⎣ ⎦
+ ⎛ ⎞⎡ ⎤ ⎡ ⎤= + +⎜ ⎟⎢ ⎥ ⎢ ⎥+ +⎣ ⎦ ⎣ ⎦⎝ ⎠

System Interconnections1 2
1 1
1 2
1 2
Systems , are complete characterizations, with
, 1,2 coprime fractions. parallel connection
controllable , left coprime
observable , right coprime series connecti
i li li ri ri
r r
l l
G G
G D N N D i
D D
D D
− −= = =
•
⇔
⇔
•
( ) ( )
2 1 1 2 1 2 2 1
1 2 1 2 2 1 2 1
2 1
1 2
oncontrollable , , or , or , are left coprimeobservable , , or , or , right coprime
det 0. Then
controllable controllableobservable
r r l r l l l r
l r l r r r l r
D N D D N D N N
D N D D N D N N
I G G
G GG
⇔
⇔
• + ∞ ∞ ≠⎡ ⎤⎣ ⎦⇔⇔ 2 1 observableG
1G
2G
1G
2G
2G1G
Stability
( ) [ ] 1
, ,
The basic idea is that stable system responds to a perturbationby remaining within a neighborhood of its equilibrium point. a state perturbation with zero i
n m px Ax Bux R u R y R
y Cx Du
G s C sI A B D−
= +∈ ∈ ∈
= +
= − +
•
( )
nput (Lyapunov/Asymptotic) an input perturbation with zero state (BIBO) simultaneous state and input perturbation (Total)
Re 0, eigenvalues with Re 0 havefull set of eigenvLyapunov:
Asympecto
tors.
t
Aλ λ
••
≤ =
( )( )
( )
ic:
BIBO:
To
Re 0
poles of 0
Lyapunov + poles ofal: t 0
A
G s
G s
λ <
<
<


















