
Robotics applications of vision-based action selection Master Project Matteo de Giacomi.
38
Robotics applications of vision-based action selection Master Project Matteo de Giacomi
-
Upload
shawn-price -
Category
Documents
-
view
216 -
download
2
Transcript of Robotics applications of vision-based action selection Master Project Matteo de Giacomi.

Robotics applications of vision-based action selection
Master Project
Matteo de Giacomi
Contents
Introduction Controller Architecture Webots implementation Visual System Amphibot II implementation Conclusion

Introduction
- Project Objectives- Related works- Used robots

Project Objectives
Use Stereo Vision to make a real robot reactively:
Avoid Obsacles Flee from Predators Follow Preys

Related Works
Schema-based architecture [Arkin] Potential Field [Andrews] [Kathib] Steering [Reynolds] Subsumption architecture [Brooks]

Used Robots
Amphibot II8 body elements
Salamandrabody elements and legs elements
Control of Speed through a Drive signal and of the direction through a Turn signal

Controller Architecture
- Overview- Behavioral Constants- Obstacle Avoidance

DRIVE,TURN
correctbehavior
obstacles
predator
prey
yes
yes
yes
yes
no
no
no
Memory
Turn, direction,pred_pos, prey_pos
pred_pos,Pred_dist,fear
Prey_pos,prey,_dist,persistance
Controller ArchitectureMotor
feedback
Visualinput
error
Disp_map
pred_pos,pred_distprey_pos,
prey_dist
motorposition

Behavioral Constants Reactivity (min time between two different
behaviors) Panic (when stuck, time after that the robot
starts moving randomly)
Confidence (min distance to an object before collision danger is triggered)
Daring (min distance the robot can approach the predator)
Fear (time in fleeing state after having lost eye contact with the predator)
Persistence (while a prey is lost, time in search state before giving up)

Obstacle Avoidance (1) Avoid Static Obstacles Avoid Sudden obsacles (ex. foot) Detect Dead-ends (requiring the implementation
of Backward locomotion)
FORWARDTurn = max(X)Drive = xcenter
BACKWARDTurn = const.
Drive = min(xcenter, max(xcenter, X\{xcenter}))
Drive <= 0
Drive > 0
Obstacle Avoidance (2)
Avoidance is triggered if an obstacle is too close (see confidence)
In a clutted environment, one tends to approach obstacles more than in an open
space
Confidence varies according to an estimation of obstacle density

Webots Implementation
- action selection- influence of behavioral constants

Interaction between behaviors
Video: obstacle avoidance, prey and predator action selection

Influence of behavioral constants When both a prey and a predator are detected
Fear and Daring affect robot behavior

Visual System
- Distance Measures Analysis- Prey and Predator Tracking

Input Mapping (1)
1 … m
1
…
…
n
Input: mxn distance grid
Output: Polar distance map.Sectors distance estimation: minima between the cells of every column (pessimist approach)
min(col1) min(…) min(colm)

Input Mapping (2) Issue: Filmed area depends on robot‘s head position Solution: Knowing Cam Angle and Angular Speed (depending on
Turn and Drive): Map Camera Field on Visual Field
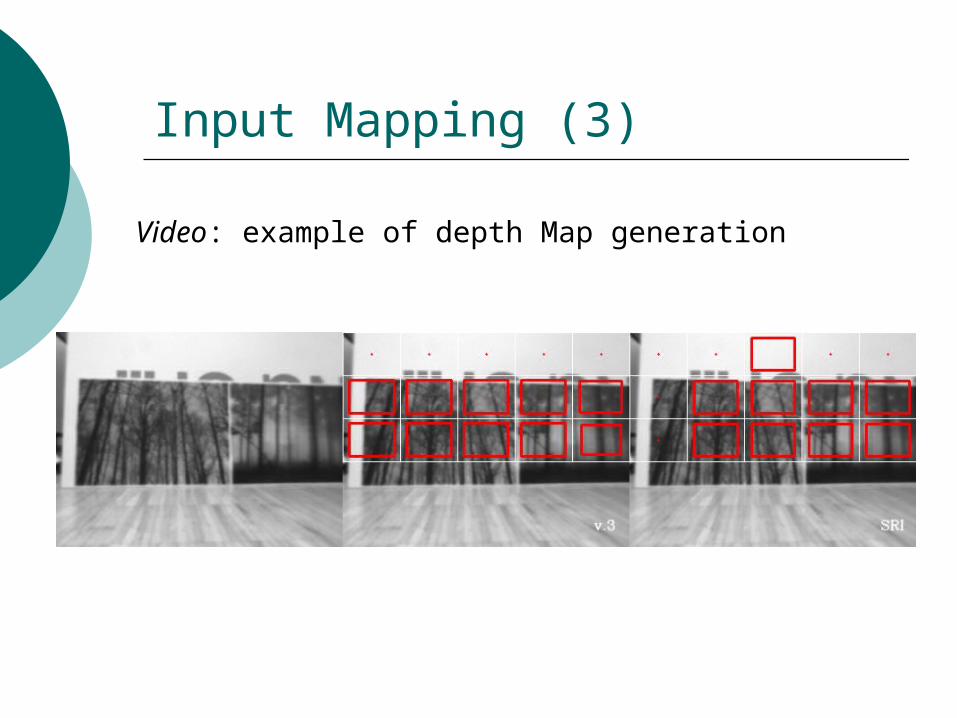
Input Mapping (3)
Video: example of depth Map generation

Prey and Predator Tracking (1)
Shape recognition Prey:
small circle Turn so that circle centre is set in front
of the robot Stop when sufficiently close
Predator: big circle Turn away as fast as possible

Prey and Predator Tracking (2)
Circular Hough Transform
Left-Right Size check

Prey and Predator Tracking (3) Evaluate target expected size according to
distance and compare with measured size

Amphibot II implementation
- Introduction- Battery charge influence- Obstacle avoidance: results

Introduction
Differences from webots: Camera‘s range: 60° instead of 120° Input: more noisy Frame rate: is smaller Drive Signal: Its relation with amplitude
and frequency critically depends on the environment and the used hardware

Battery charge influence
Estimation or measure of battery charge impossible, world rotation phase in mapping must be skipped

Results
Video: setup presentation, obstacle avoidance

Conclusion
- Results- Further Works

Results
Stereo-Vision system Effective for both obstacle avoidance
and target recognition
Behavior Scalable (a joystick was added as a new
behavior with minimal variations) Quick, memory inexpensive „Natural“ parameters:
One architecture, many behaviors Several parameters to trim, „aestetic“
criteria

Further works
Camera-to-Wold mapping can be improved?
How to define parameter values? Possible addition of a planner? How can the visual system cope with
a water enviroment? Robot gait may adapt to the type of
surface?
THE END
Thank you! Any question?


Amphibot‘s Input Mapping
Polar map containing 19 sectors Robot kept on place while oscillating
parallel to a wall

Obstacle Avoidance
Video: Dead-end detection
Prey Cornering Behavior
Video: obstacle is ignored in case a prey is present (behavior feedback)

Turning vs. Reactivity Tracking in a webots simulation Low Reactivity produces an unnatural behavior High Reactivity makes the robot react too slowly

Turning Radius vs. Battery charge
Video: turning performance along time with constant drive and turn

Drive Signal vs. Amplitude and Frequency

Drive vs. Obstacle distance

Bonus: Hough Transform
Video: circle tracking


















