Robotic Sensors - uni-goettingen.de · Robotic Sensors Mohamad Javad Aein WS 2014-2015. Modeling...
124
Introduction to Computer Vision and Robotics Robotic Sensors Mohamad Javad Aein WS 2014-2015
Transcript of Robotic Sensors - uni-goettingen.de · Robotic Sensors Mohamad Javad Aein WS 2014-2015. Modeling...

Introduction to Computer Vision and Robotics
Robotic Sensors
Mohamad Javad AeinWS 2014-2015

Modeling Sensing
Actuation
Motion Planning
AIControl
Kinematics
Dynamic

Modeling
Kinematics
Control
Sensing
ActuationDynamic

Modeling
KinematicsToday!
Control
Sensing
ActuationDynamic

What is a sensor?
TransducerInput energy Output energy
SensorInput energy Electrical energy

What is a sensor?
TransducerInput energy Output energy
ActuatorElectrical Output energy

Why do we need sensors?

Why do we need sensors?
Uncertainty in actuator
Uncertainty in Environment

Why do we need sensors?

Why do we need sensors?
Sensor: detects events or changes in quantities

Types of sensors
Proprioception(PC)

Types of sensors
Proprioception(PC)
Motor speed
heading
Joint torque
Battery status

Types of sensors
Proprioception(PC)
Exteroception (EC)
Motor speed
heading
Joint torque
Battery status

Types of sensors
Proprioception(PC)
Exteroception (EC)
Motor speed
heading
Joint torque
Battery status
Distance to objects
Ext. Force/torque
Light intensity
Tactile sensor

Types of sensorsThermistor

Types of sensors
Passive
Thermistor

Types of sensors
Passive
Thermistor
Ultrasonic sensor
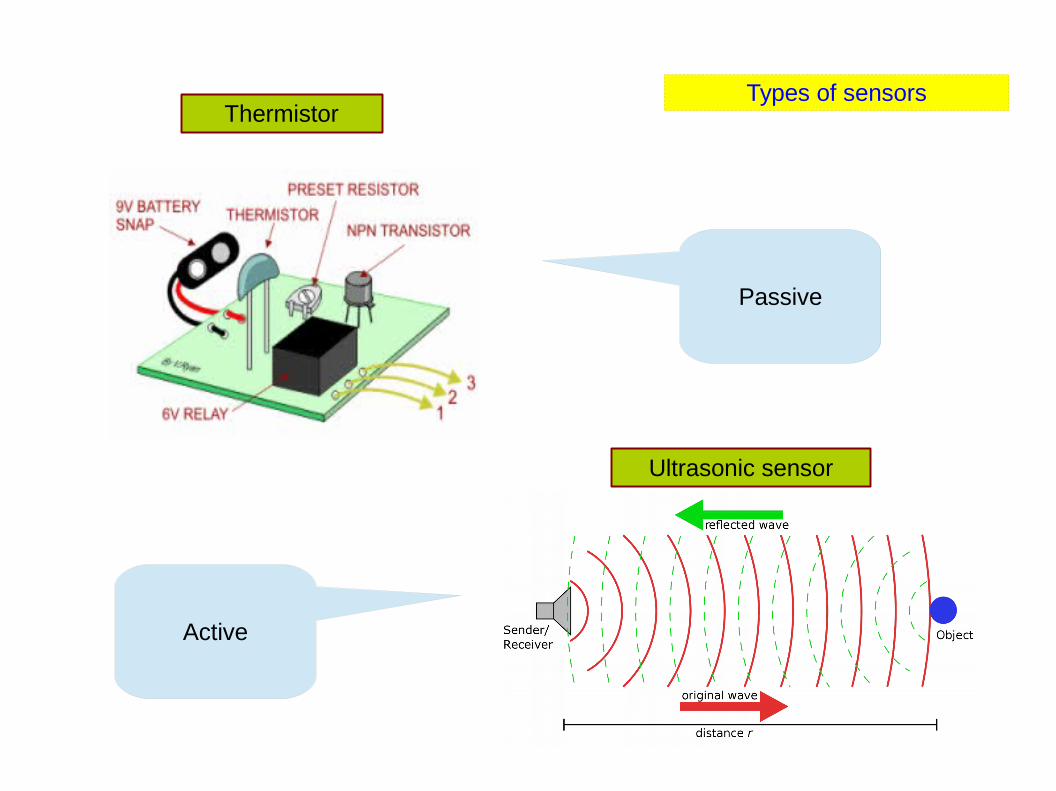
Types of sensors
Passive
Active
Thermistor
Ultrasonic sensor

Sensor characteristics
Precision
Accuracy
Resolution
Dead zone
Range and Span

Sensor characteristics
Precision
Accuracy
Resolution
Dead zone
Range and Span
Minimum and Maximum value
Range
Span
Difference of Max and Min values
e.g : Themperature range -40 to 70
e.g : span 110 degrees

Sensor characteristics
Precision
Accuracy
Resolution
Dead zone
Minimum detectable change in input
Resolution
e.g: Themperature range 0.1 degree
e.g: 0.1 % of span
Range and Span

Sensor characteristics
Precision
Accuracy
Resolution
Dead zone
Difference between output and true value
Accuracy
e.g: Themperature accuracy 0.5 degree
e.g: 1 % of span
Range and Span

Sensor characteristics
Precision
Accuracy
Resolution
Dead zone
AccuracyResolution vs
Range and Span

Sensor characteristics
Precision
Accuracy
Resolution
Dead zone
Precision
Repeatability of measurement
e.g: Themperature precision 0.1 degree
e.g: 0.2 % of span
Range and Span

Sensor characteristics
Precision
Accuracy
Resolution
Dead zone
AccuracyPrecision vs
Not precise: Bad sensor!
Not accurate: calibration!
Range and Span

Sensor characteristics
Precision
Accuracy
Resolution
Dead zone
AccuracyPrecision vs
Not precise: Bad sensor!
Not accurate: calibration!
Range and Span

Joint Position
Joint Velocity
Joint Torque
Ext. Force/Torque
Grasp (Fingertips)
Obstacles
Proprioception Exteroception

Position/Velocity
Heading
Wheel speed
Position/Velocity
Heading
Obstacles
Proprioception Exteroception

Position/Velocity
Heading
Wheel speed
Proprioception
Position/Velocity
Heading
Obstacles
Exteroception
Joint Position
Joint Velocity
Joint Torque
Ext. Force/Torque
Grasp (Fingertips)
Obstacles
Proprioception
Exteroception

Position/Velocity
Heading
Wheel speed
Proprioception
Position/Velocity
Heading
Obstacles
Exteroception
Joint Position
Joint Velocity
Joint Torque
Ext. Force/Torque
Grasp (Fingertips)
Obstacles
Proprioception
Exteroception
Motor/Axis sensor

Classes of sensors
Motor/Axis sensor Potentiometer

Classes of sensors
Motor/Axis sensor Potentiometer
Absolute position!
CheapLow performance

Classes of sensors
Motor/Axis sensor Resolver

Classes of sensors
Motor/Axis sensor Incremental encoder

Classes of sensors
amplitude
ω=αt
direction
00=001=110=211=3
Example: 1000 pulse/turn
α=360rsupdeg
1000=0.36deg
Motor/Axis sensor Incremental encoder

Classes of sensors
amplitude
ω=αt
direction
00=001=110=211=3
Example: 1000 pulse/turn
α=360rsupdeg
1000=0.36deg
Motor/Axis sensor Incremental encoder
Speed
No absolute position!

Classes of sensors
Motor/Axis sensor Absolute encoder

Classes of sensors
Gray code
Motor/Axis sensor Absolute encoder
Normal binary

Classes of sensors
Motor/Axis sensor
Incremental encoder
Potentiometer
Resolver
Inductive encoder(Incoder)
NEW!
Absolute encoder

Position/Velocity
Heading
Wheel speed
Proprioception
Position/Velocity
Heading
Obstacles
Exteroception
Joint Position
Joint Velocity
Joint Torque
Ext. Force/Torque
Grasp (Fingertips)
Obstacles
Proprioception
Exteroception
Heading sensor
inclinometer
compass

Classes of sensors
Heading sensors compass
Earth magnetic field
noisy
Sensitive to roll and pitch
Together with accelerometer
Mechanical
Hall effect
Magneto resistive

Mechanical
Hall effect
Magneto resistive

Classes of sensors
inclinometerHeading sensors

Position/Velocity
Heading
Wheel speed
Proprioception
Position/Velocity
Heading
Obstacles
Exteroception
Joint Position
Joint Velocity
Joint Torque
Ext. Force/Torque
Grasp (Fingertips)
Obstacles
Proprioception
Exteroception
Positioning

Classes of sensors
GPS
Global positioning system
Electromagnetic wave (speed of light)Position and velocity
expensive
Only outdoors
Next: Indoor Positioning System (IPS)
Positioning

Classes of sensors
Ultrasound
Mechanical wave (speed of sound)Position and velocity
Local
Positioning

Classes of sensors
Retroreflective beaconPositioning

Inertial navigation system (INS)
Inertial measurement unit (IMU)
Gyroscope
Accelerometer

Classes of sensors
Gyroscope Angular rate sensor
Mechanical
Precession

Classes of sensors
Gyroscope Angular rate sensor
Mechanical
Measuring Angular Velocity

Classes of sensors
Gyroscope Angular rate sensor
Optical Gyroscope
Sagnac effect Ring laserFiber optic

Classes of sensors
Gyroscope Angular rate sensor
Vibrating Gyroscope

Classes of sensors
Accelerometer Acceleration sensor
Mass-Spring system

Inertial navigation system (INS)

Position/Velocity
Heading
Wheel speed
Proprioception
Position/Velocity
Heading
Obstacles
Exteroception
Joint Position
Joint Velocity
Joint Torque
Ext. Force/Torque
Grasp (Fingertips)
Obstacles
Proprioception
Exteroception
Range/Proximity

Classes of sensors
Bumper sensorRange/Proximity

Classes of sensors
InfraredRange/Proximity

Classes of sensors
Laser range finder
Measure distance from observer to target
Range/Proximity

Classes of sensors
Ultrasonic range finder
SONAR: sound navigation and ranging
Range/Proximity

Classes of sensors
Range/Proximity
magnetic range finder
Camera
Inductive
Hall effect

Position/Velocity
Heading
Wheel speed
Proprioception
Position/Velocity
Heading
Obstacles
Exteroception
Joint Position
Joint Velocity
Joint Torque
Ext. Force/Torque
Grasp (Fingertips)
Obstacles
Proprioception
Exteroception
Tactile

Classes of sensors
Tactile sensors Pressure array
Tactel (tactile element)
Capacitive sensor Piezoelectric

Position/Velocity
Heading
Wheel speed
Proprioception
Position/Velocity
Heading
Obstacles
Exteroception
Joint Position
Joint Velocity
Joint Torque
Ext. Force/Torque
Grasp (Fingertips)
Obstacles
Proprioception
Exteroception
Force/torque

Classes of sensors
Force/Torque Torque sensor

Classes of sensors
Force/Torque 6 DOF F/T

Overview
What is a sensor
Why do we need sensors?
Types of sensors
Sensor characteristics
Classes of sensors







Actuators

� Motors
� Hydraulic/Pneumatic Actuators
� Artificial Muscles
� Inflatable Robot/Actuators
� Omnidirectional Wheels
Actuators

� Direct current (DC) considered, since battery
driven systems
Motors

� Direct current (DC) considered, since battery
driven systems
� Motor design:
± Standard DC
± Stepper Motors
± Servo Motors
Motors

� Direct current (DC) considered, since battery
driven systems
� Motor design:
± Standard DC
± Stepper Motors
± Servo Motors
� Adjustment of speed and direction of motion
Motors

DC Motor t Principle





DC Motor t Principle
� Torque produced by motor:
torque constant of motor, current in armature,
generated by the voltage applied to the motor
http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html
Wm K
mi
Km i
Va

DC Motor t Principle
� Torque produced by motor:
torque constant of motor, current in armature,
generated by the voltage applied to the motor
� Output power:
applied (required) torque, angular velocity of axis
http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html
Wa
Wm K
mi
Km i
Va
Po W
aZ
Z

DC Motor t Principle
� Torque produced by motor:
torque constant of motor, current in armature,
generated by the voltage applied to the motor
� Output power:
applied (required) torque, angular velocity of axis
� Input power:
applied voltage, current in armature
http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html
Wa
Wm K
mi
Km i
Va
Po W
aZ
Z
Pi V
ai
Va
i

DC Motor t Principle
� Torque produced by motor:
torque constant of motor, current in armature,
generated by the voltage applied to the motor
� Output power:
applied (required) torque, angular velocity of axis
� Input power:
applied voltage, current in armature
� Efficiency: (not constant for all speeds)
http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html
Wa
Wm K
mi
Km i
Va
Po W
aZ
Z
Pi V
ai
Va
i
K P0
Pi
WaZ
Vai

DC Motor
http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html
� Possibility to change the direction
of motion







DC Motor t Pulse Width Modulation (PWM)
� So far motor either runs or not
� Control of speed also necessary
http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html














DC Motor t Servo Motor
� DC motor with encapsulated
gearbox and electronics for PW
control of desired (angular)
position
� ~ +-120o around center position



DC Motors t In General
Remember:
� No (externally available) sensor attached to motor
� Wheel encoders have to be attached additionally
Criteria for motor selection:
� Task (servo/step/normal motor)
� Provides enough torque and speed
� Weight
� Size
� Efficiency
http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html

DC Motors t In General
Remember:
� No (externally available) sensor attached to motor
� Wheel encoders have to be attached additionally
Criteria for motor selection:
� Task (servo/step/normal motor)
� Provides enough torque and speed
� Weight
� Size
� Efficiency
http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html
K

Other Actuators
� Hydraulic/Pneumatic Actuators
� Artificial Muscles
� Inflatable Robot/Actuators
� Omnidirectional Wheels
http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html

� Single- and double-acting cylinders
Single-acting Double-acting
Hydraulic/Pneumatic Actuators

� Single-acting cylinders exert force either on
extension or retraction
� They require an outside force to complete the
second motion
� Double-acting cylinders generate force during
both extension and retraction
Hydraulic/Pneumatic Actuators

Hydraulic/Pneumatic Actuators
� Also hydraulic rotation actuators
http://www.youtube.com/watch?v=U4KpMiXOUAI

� Can be used with air or fluid
Artificial Muscles

Artificial Muscles
� Humanoid with fluid muscles
www.youtube.com/watch?v=pgKBWkY3Qks

Inflatable Robot
http://www.hizook.com/blog/2011/11/21/inflatable-robots-otherlab-walking-robot-named-ant-roach-and-complete-arm-plus-hand

Inflatable Robot
http://www.youtube.com/watch?v=BUtBd4sVrzA
� Pneumatic hand

� Wheel with additional small discs around the
circumference
� Normal forward movement
� Slide laterally with great ease
Omnidirectional Wheels

Omnidirectional Wheels
� Robot with omnidirectional wheels
http://youtu.be/XmEuu9X6s1E

Omnidirectional Wheels
� Fork lifter with omnidirectional wheels
http://youtu.be/CjcyHicm3NA

� Principle of DC motors
� Other actuators:
� Hydraulic/Pneumatic Actuators
� Artificial Muscles
� Inflatable Robot/Actuators
� Omnidirectional Wheels
� ...
Actuators t Summary