
Robotic Motion Planning: Potential Functions and Search
26
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds Robotic Motion Planning: Potential Functions and Search Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Transcript of Robotic Motion Planning: Potential Functions and Search
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Robotic Motion Planning:Potential Functions and Search
Robotics Institute 16-735http://voronoi.sbp.ri.cmu.edu/~motion
Howie Chosethttp://voronoi.sbp.ri.cmu.edu/~choset

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
The Basic Idea
Compute Distance• Polygon• Sensor• Grid
Local Minima• Wavefront• Navigation Function

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Diffeomorphism vs. Homeomorphism
HOMEOMORPHISM
DIFFEOMORPHISM

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Potential Fields on Non-Euclidean Spaces
• Thus far, we’ve dealt with points in Rn --- what about real manipulators
• Recall we can think of the gradient vectors as forces -- the basic idea is to define forces in the workspace (which is ℜ2 or ℜ3)
Power in configuration space
Power in work space
Power is conserved!

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Force on an Object
torque
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
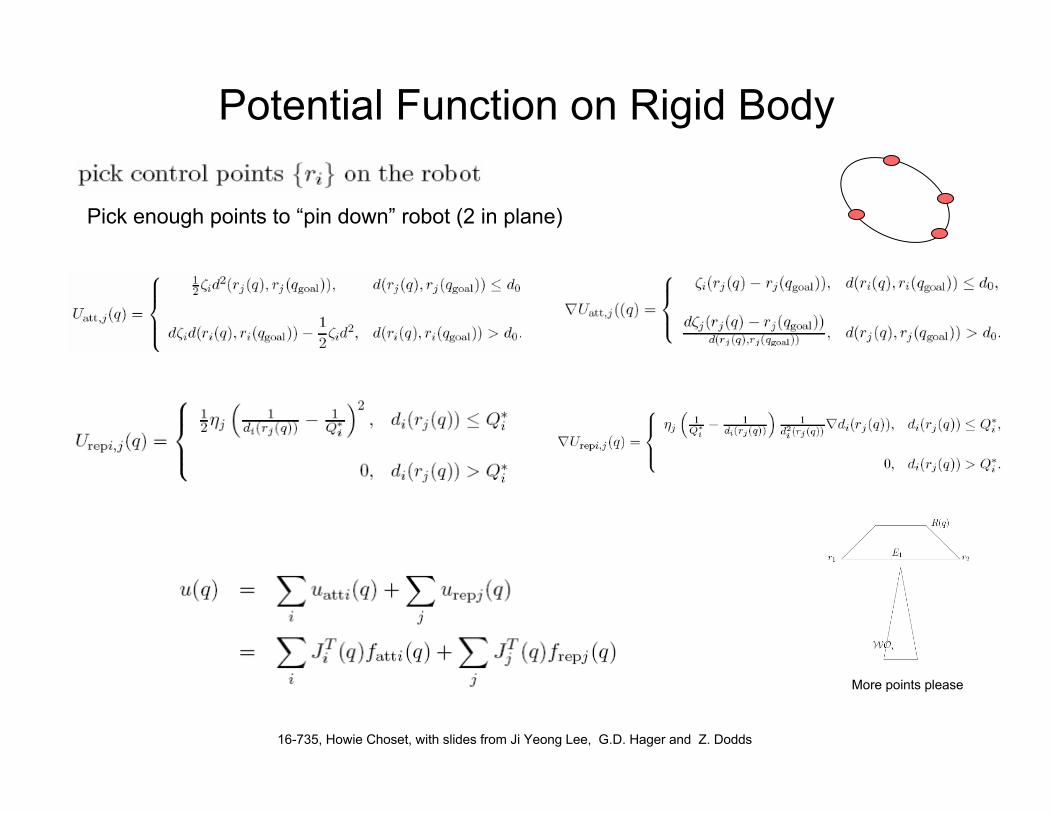
Potential Function on Rigid Body
Pick enough points to “pin down” robot (2 in plane)
More points please

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Potential Fields for Multiple Bodies
• Recall we can think of the gradient vectors as forces -- the basic idea is to define forces in the workspace (which is ℜ2 or ℜ3)
– We have Jt f = u where f is in W and u is in Q– Thus, we can define forces in W and then map them to Q
– Example: our two-link manipulator
α
β
L1
L2
(x,y)
y
x
x L1cα L2cα+β
y L1sα L2sα+β
= +
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
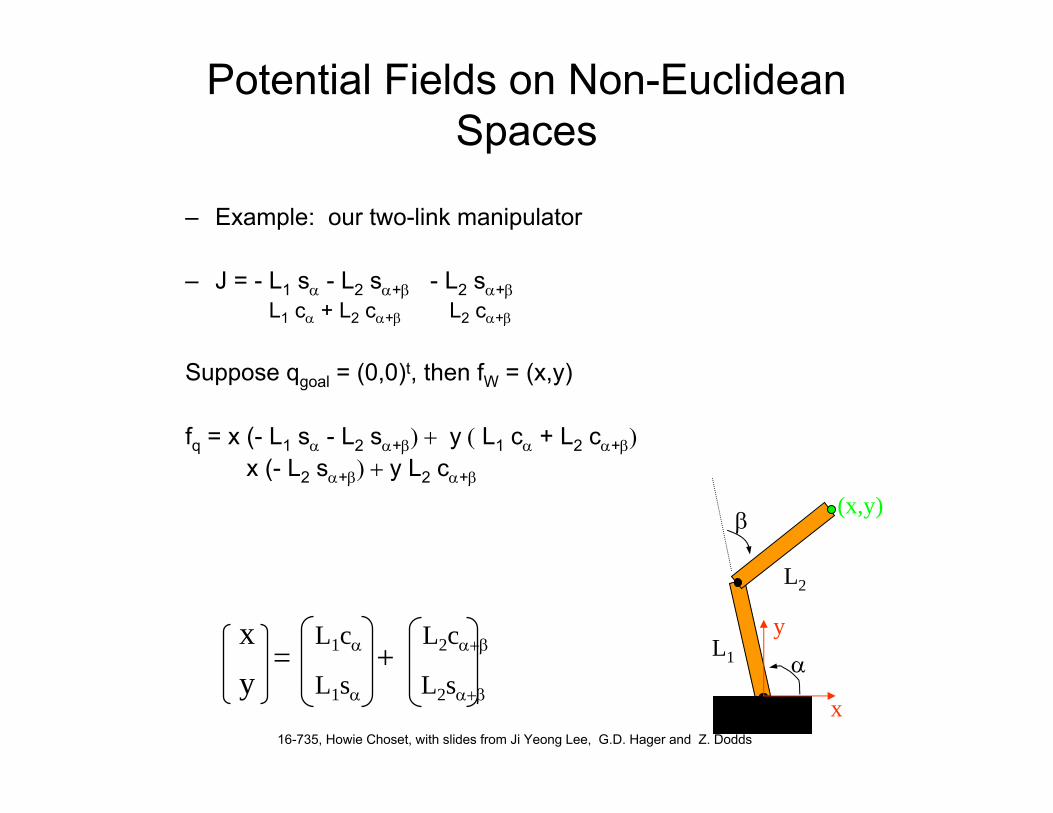
Potential Fields on Non-Euclidean Spaces
– Example: our two-link manipulator
– J = - L1 sα - L2 sα+β - L2 sα+βL1 cα + L2 cα+β L2 cα+β
Suppose qgoal = (0,0)t, then fW = (x,y)
fq = x (- L1 sα - L2 sα+β) + y ( L1 cα + L2 cα+β)x (- L2 sα+β) + y L2 cα+β
α
β
L1
L2
(x,y)
y
x
x L1cα L2cα+β
y L1sα L2sα+β
= +

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
In General
• Pick several points on the manipulator
• Compute attractive and repulsive potentials for each
• Transform these into the configuration space and add
• Use the resulting force to move the robot (in its configuration space)
α
β
L1
L2
(x,y)
y
x
RF4
RF3
RF2
RF1
AF1
Be careful to use the correct Jacobian!

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Summary
• Basic potential fields– attractive/repulsive forces
• Gradient following and Hessian
• Navigation functions
• Extensions to more complex manipulators

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Outline
• Overview of Search Techniques• A* Search• D* Search

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Graphs
Collection of Edges and Nodes (Vertices)
A tree
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Search in Path Planning
• Find a path between two locations in an unknown, partially known, or known environment
• Search Performance– Completeness– Optimality → Operating cost– Space Complexity– Time Complexity

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Search
• Uninformed Search– Use no information obtained from the environment– Blind Search: BFS (Wavefront), DFS
• Informed Search– Use evaluation function– More efficient– Heuristic Search: A*, D*, etc.

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Uninformed Search
Graph Search from A to N
BFS

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Informed Search: A*
Notation• n → node/state• c(n1,n2) → the length of an edge connecting between n1 and n2
• b(n1) = n2 → backpointer of a node n1 to a node n2.

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Informed Search: A*
• Evaluation function, f(n) = g(n) + h(n)• Operating cost function, g(n)
– Actual operating cost having been already traversed• Heuristic function, h(n)
– Information used to find the promising node to traverse– Admissible → never overestimate the actual path cost
Cost on a grid

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
A*: Algorithm
The search requires 2 lists to store information about nodes
1) Open list (O) stores nodes for expansions
2) Closed list (C) stores nodes which we have explored
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
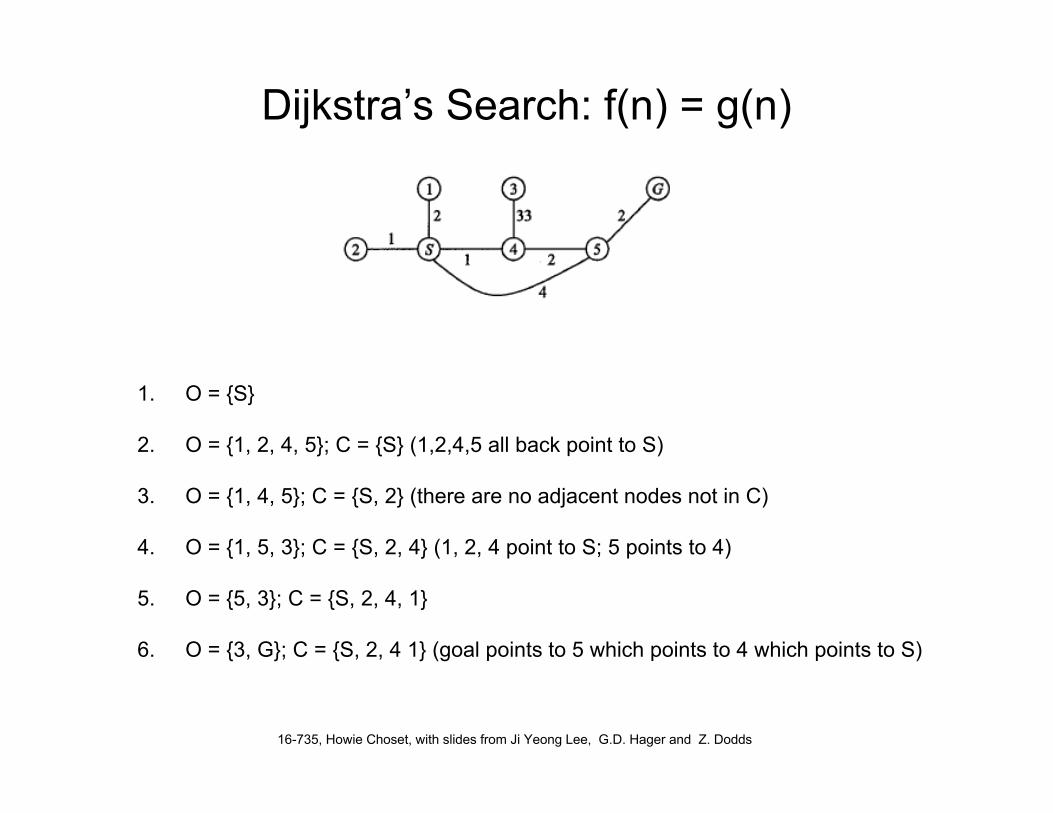
Dijkstra’s Search: f(n) = g(n)
1. O = {S}
2. O = {1, 2, 4, 5}; C = {S} (1,2,4,5 all back point to S)
3. O = {1, 4, 5}; C = {S, 2} (there are no adjacent nodes not in C)
4. O = {1, 5, 3}; C = {S, 2, 4} (1, 2, 4 point to S; 5 points to 4)
5. O = {5, 3}; C = {S, 2, 4, 1}
6. O = {3, G}; C = {S, 2, 4 1} (goal points to 5 which points to 4 which points to S)

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Two Examples Running A*
GOAL
33 3
3
3
3 3
1
1 22
3
3
3
2
2
0 Start
2
241
1
1 1
1
1 1
1 1
A
B
CD
E F
G H I
J K
L
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
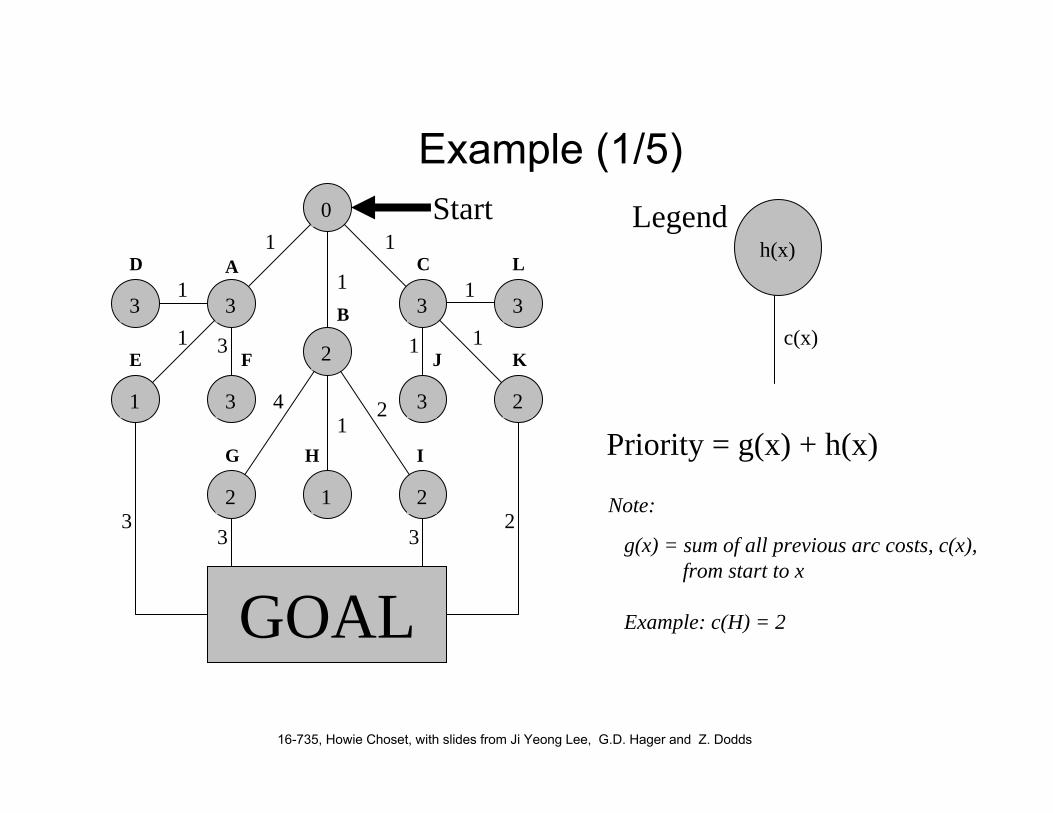
Example (1/5)
h(x)
c(x)
Legend
Priority = g(x) + h(x)
g(x) = sum of all previous arc costs, c(x),from start to x
Example: c(H) = 2GOAL
33 3
3
3
3 3
1
1 22
3
3
3
2
2
0 Start
2
241
1
1 1
1
1 1
1 1
A
B
CD
E F
G H I
J K
L
Note:

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Example (2/5)
C(4)
A(4)
B(3)
A(4)
I(5)
G(7)
C(4)
H(3)
First expand the start node
If goal not found,expand the first nodein the priority queue(in this case, B)
Insert the newly expandednodes into the priority queueand continue until the goal isfound, or the priority queue isempty (in which case no pathexists)
Note: for each expanded node,you also need a pointer to its respectiveparent. For example, nodes A, B and Cpoint to Start
GOAL
33 3
3
3
3 3
1
1 22
3
3
3
2
2
0 Start
2
241
1
1 1
1
1 1
1 1
A
B
CD
E F
G H I
J K
L

16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Example (3/5)
C(4)
A(4)
B(3)
A(4)
I(5)
G(7)
C(4)
H(3) No expansion
F(7)
C(4)
I(5)
G(7)
D(5)
E(3) GOAL(5)
We’ve found a path to the goal:Start => A => E => Goal(from the pointers)
Are we done?GOAL
33 3
3
3
3 3
1
1 22
3
3
3
2
2
0 Start
2
241
1
1 1
1
1 1
1 1
A
B
CD
E F
G H I
J K
L
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
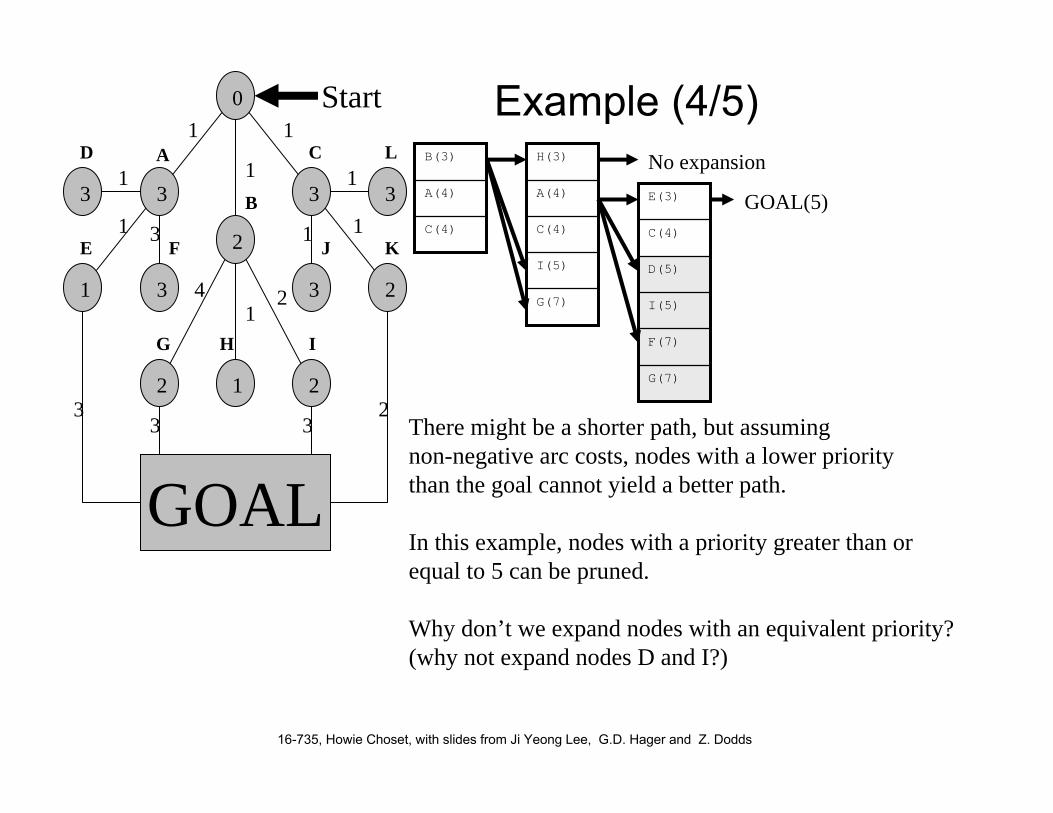
Example (4/5)
C(4)
A(4)
B(3)
A(4)
I(5)
G(7)
C(4)
H(3) No expansion
F(7)
C(4)
I(5)
G(7)
D(5)
E(3) GOAL(5)
There might be a shorter path, but assumingnon-negative arc costs, nodes with a lower prioritythan the goal cannot yield a better path.
In this example, nodes with a priority greater than orequal to 5 can be pruned.
Why don’t we expand nodes with an equivalent priority?(why not expand nodes D and I?)
GOAL
33 3
3
3
3 3
1
1 22
3
3
3
2
2
0 Start
2
241
1
1 1
1
1 1
1 1
A
B
CD
E F
G H I
J K
L
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
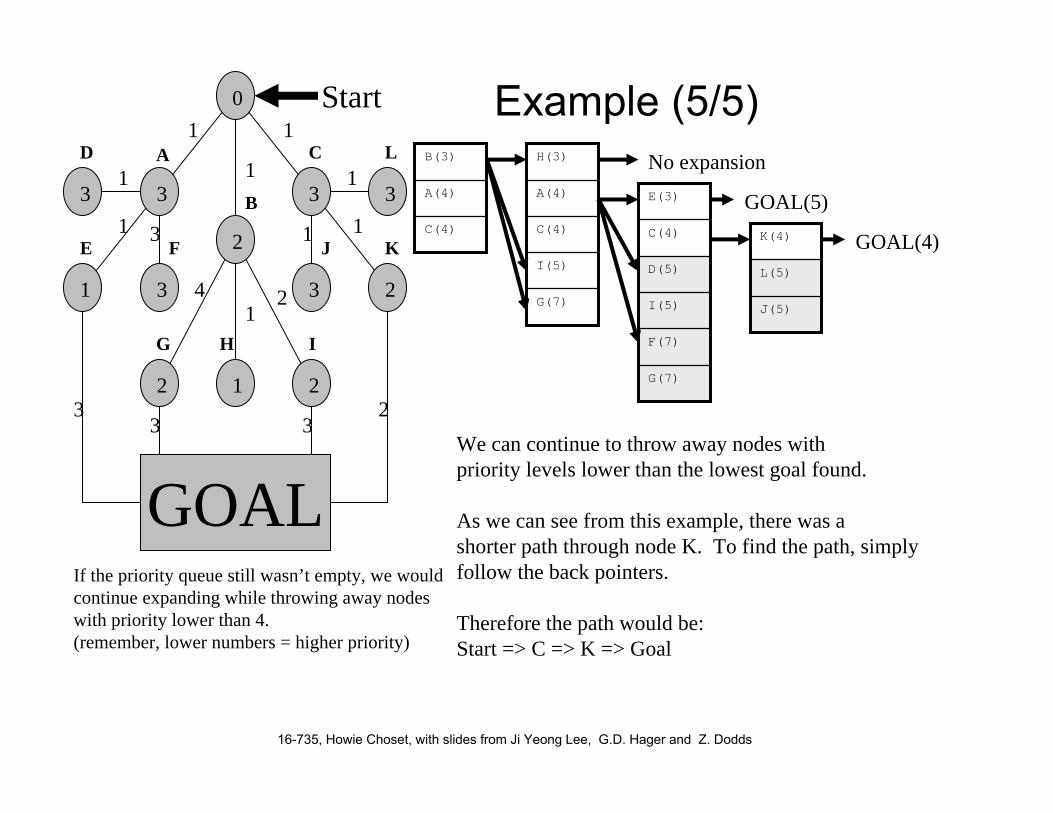
Example (5/5)
C(4)
A(4)
B(3)
A(4)
I(5)
G(7)
C(4)
H(3) No expansion
F(7)
C(4)
I(5)
G(7)
D(5)
E(3) GOAL(5)
We can continue to throw away nodes withpriority levels lower than the lowest goal found.
As we can see from this example, there was ashorter path through node K. To find the path, simplyfollow the back pointers.
Therefore the path would be:Start => C => K => Goal
L(5)
J(5)
K(4) GOAL(4)
If the priority queue still wasn’t empty, we wouldcontinue expanding while throwing away nodeswith priority lower than 4.(remember, lower numbers = higher priority)
GOAL
33 3
3
3
3 3
1
1 22
3
3
3
2
2
0 Start
2
241
1
1 1
1
1 1
1 1
A
B
CD
E F
G H I
J K
L
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Assign Final Project
• Must have a filtering component (e.g., Kalman, Bayes)• Work on a real robot
Create a PPT• Title, Name, Photo of you, Photo of Robot• What your project is going to do• Which filtering technique and why• How you are going to demonstrate result


















