
Robotic Arm Presentation
22
Serif Mark II Proposal Paso Robles High School Engineering Department
-
Upload
mason-hargrave -
Category
Documents
-
view
70 -
download
2
Transcript of Robotic Arm Presentation

Serif Mark II ProposalPaso Robles High School Engineering Department

We Have an Idea
Build an arm that:
● mimics human motion
● is controlled by human motion
● is programmable

Welcome to the Drawing Board
● Designed in Autodesk Inventor
● Functioning elbow joint
● Improvements easily applied

Forearm

Upper-Arm

● Motor rotates
● Rotates gear fixed on axel
● Moves forearm up/down
Designing the Elbow

We (Could) Have the Power

Building Something New
● Prototype for ball and socket joint
● Omni-Wheels
● Can be robotic

Intro
Gear ratios use different sizes and types of gears to change the speed and torque.

Speed
With the same input speed● Gears with more teeth (bigger) rotates proportionally slower because it takes more
teeth/rotation● Gears with less teeth (smaller)rotates proportionally faster because it takes less
teeth/rotation
Therefore● Speed in*Teeth in=Speed out*Teeth out or● Speed in*(Teeth in/Teeth out)=Speed out or● Speed in/(Teeth out/Teeth in)=Speed out or● Speed in/Gear reduction=Speed out
(“Teeth out/Teeth in” is gear reduction)

Torque
Torque=Force*Distance so Torque in=Force in*Distance in orForce in=Torque
in/Distance inForce in is exerted on the gear out teeth soTorque out=Force in*Distance out orTorque out=(Torque in/Distance in)*Distance out orTorque out =Torque in*(Distance out/Distance in) orTorque out =Torque in*(Teeth out/Teeth in) orTorque out =Torque in*Gear reduction
(distance is radius)(radius is proportional to teeth)

Torque Pics

More

What is a motor?
A machine, especially one powered by electricity or internal combustion, that supplies motive power to a vehicle or a device with moving parts.
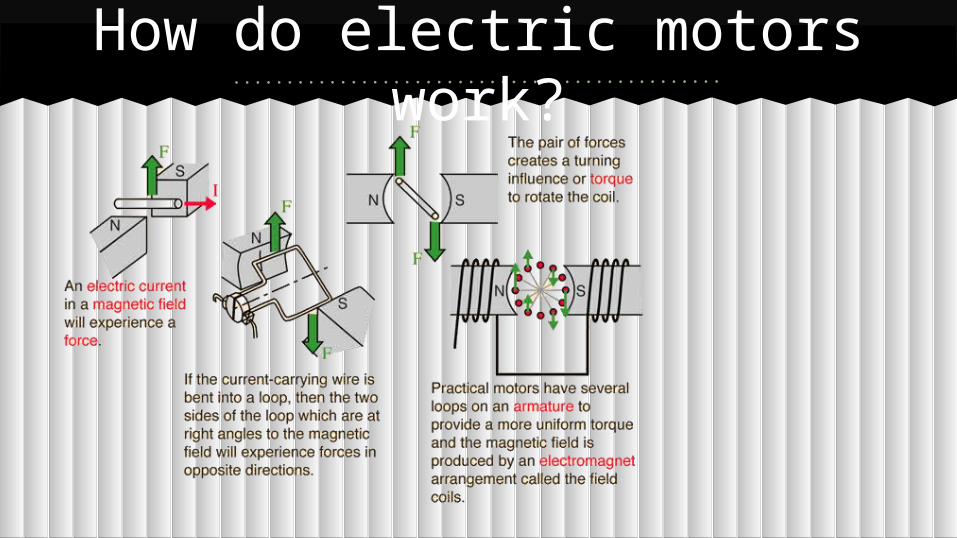
How do electric motors work?

Motor Strength
● Motor strength comes from the motor’s rotation speed and torque
● Depending on operating voltage, the stall torque can either be 25.5 kg x cm or 31.6kg x cm
● What this shows is how much weight a motor can hold when it isn’t rotating

Our Motors
● The motor we selected has the strongest stalltorque within our budget.● The resolution will help the arm mimic actions
precisely● The motors will be light enough to attach to
the arm without weighing it down

Introducing the Omni Wheel
● Rotate like normal wheels● Smaller wheels roll
perpendicular to rotational axis
● Two degrees of freedom

It’s Alive!
This is the prototype of a ball and socket joint

The Advantages
● More degrees of freedom with less joints
● Can rotate a ball
● Robotic

Cy’s Creative Corner
Imagine if our elbows were ball and socket joints similar to a shoulder...

Real World Applications
Manufacturing would be more efficient if they had less moving joints.
















![Hydraulic Robotic Arm[1]](https://static.fdocuments.in/doc/165x107/577c83d31a28abe054b667dc/hydraulic-robotic-arm1.jpg)

