Robot Building Lab: Localization and Mapping Collision Detection and Obstacle Avoidance Using Sonar ...
56
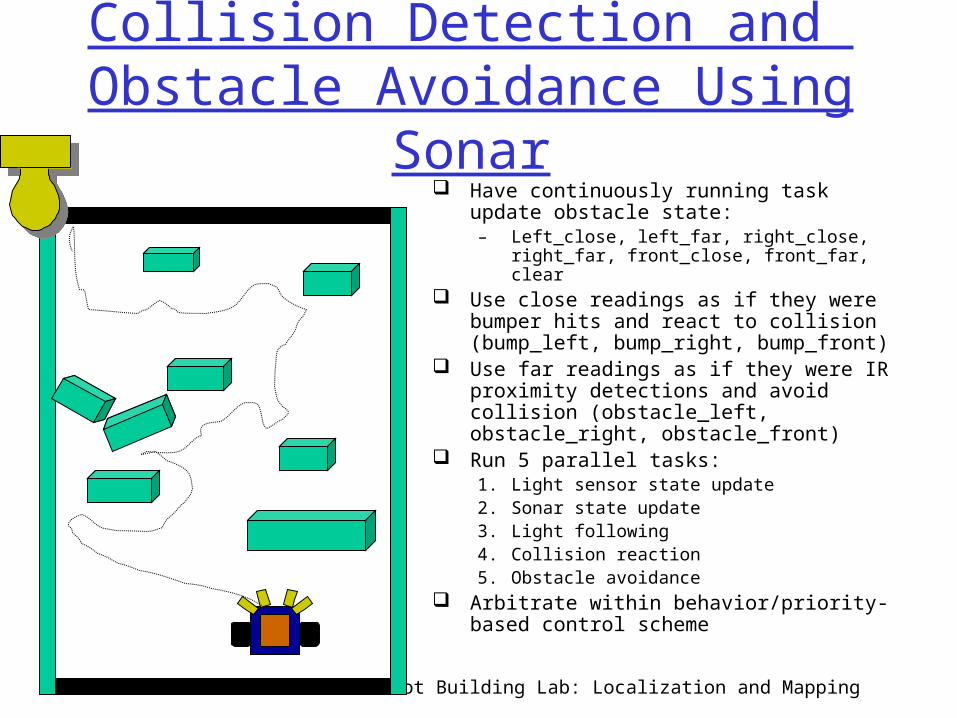
Robot Building Lab: Localization and Mapping Collision Detection and Obstacle Avoidance Using Sonar Have continuously running task update obstacle state: – Left_close, left_far, right_close, right_far, front_close, front_far, clear Use close readings as if they were bumper hits and react to collision (bump_left, bump_right, bump_front) Use far readings as if they were IR proximity detections and avoid collision (obstacle_left, obstacle_right, obstacle_front) Run 5 parallel tasks: 1. Light sensor state update 2. Sonar state update 3. Light following 4. Collision reaction 5. Obstacle avoidance Arbitrate within behavior/priority- based control scheme
-
Upload
valerie-daniel -
Category
Documents
-
view
226 -
download
1
Transcript of Robot Building Lab: Localization and Mapping Collision Detection and Obstacle Avoidance Using Sonar ...
Robot Building Lab: Localization and Mapping
Collision Detection and Obstacle Avoidance Using
Sonar Have continuously running task update
obstacle state:– Left_close, left_far, right_close,
right_far, front_close, front_far, clear Use close readings as if they were
bumper hits and react to collision (bump_left, bump_right, bump_front)
Use far readings as if they were IR proximity detections and avoid collision (obstacle_left, obstacle_right, obstacle_front)
Run 5 parallel tasks:1. Light sensor state update2. Sonar state update3. Light following4. Collision reaction5. Obstacle avoidance
Arbitrate within behavior/priority-based control scheme

Robot Building Lab: Localization and Mapping
Inverse Kinematics Demo Demonstrate the following
pattern using inverse kinematics, closed-loop encoder monitoring, and proportional control:1. Square: 36 inches forward, 90
degree turn, 36 inches forward, 90 degree turn, 36 inches forward, 90 degree turn, 36 inches forward, 90 degree turn
Given: – Initial x,y,theta– Target x’,y’,theta or
x,y,theta’ or x’,y’,theta’ Compute (using simple
inverse kinematics)– Target right encoder
counts– Target left encoder counts
Loop (while targets not reached)
– Compute current ratio and set state =• Below_target_ratio or
above_target_ratio or at_target_ratio (note: target ratio is 1:1 if you are always going straight)
– Adjust motor velocities to stay in at_target_ratio state (with proportional control)

Robot Building Lab: Localization and Mapping
Lab 8
Localization and Mappinghttp://plan.mcs.drexel.edu/courses/robotlab/labs/lab08.pdf

Robot Building Lab: Localization and Mapping
Find Goal, Build Map
Record initial position Head toward goal
light, avoiding and reacting to obstacles
Take sonar sweeps and odometry readings and build map as you move
Fix odometry errors with landmarks (using ground sensors)
Output map to host View graphically

Robot Building Lab: Localization and Mapping
Today
Localization re-visitedSimple uncertainty correction with
landmarksLocal sonar mapsSensor fusion and global sonar maps
In Two Weeks: Off-line processing and path planning using maps

Robot Building Lab: Localization and Mapping
Review: Dead Reckoning (deductive reckoning)
Integration of incremental motion over time
Given known start position/orientation (pose)
Given relationship between motor commands and robot displacement (linear and rotational)
Compute current robot pose with simple geometric equations
Provides good short-term relative position accuracy
Accumulation of errors in long-term – wheel slippage, bumps, etc.,
(From Borenstein et. al.)

Robot Building Lab: Localization and Mapping
Review: Forward Kinematics Given: Starting pose (x,y,theta), Motor commands Compute: Ending pose (x’,y’,theta’) Assume encoders mounted on drive motors Let
– Cm = encoder count to linear displacement conversion factor
– Dn = wheel diameter– Ce = encoder pulses per revolution– N = gear ratio
Cm = Dn / N Ce Incremental travel distance for left wheel
= Cm NL (NL = encoder counts on left wheel) Incremental travel distance for right wheel
= Cm NR (NR = encoder counts on right wheel) That’s all we need for determining horizontal
displacement and rotation from encoder counts

Robot Building Lab: Localization and Mapping
Review: Differential Drive Odometry/Kinematics
DL = distance traveled by left wheel
DR = distance traveled by right wheel
Distance traveled by center point of robot is then D = (DR+DL)/2
Change in orientation Dtheta is then (DR – DL)/base
New orientation is then theta’=theta + Dtheta
If old robot position is x,y new robot position is nowx’ = x + D cos theta’y’ = y + D sin theta’

Robot Building Lab: Localization and Mapping
Localization using Kinematics
Issue: We can’t tell direction from encoders alone
Solution: Keep track of forward/backward motor command sent to each wheel
Localization program: Build new arrays into behavior/priority-based controller and use to continually update location
Doesn’t solve noise problems, though
Robot Building Lab: Localization and Mapping
Review: Prioritization Algorithm: Basic Concept
•Each process has:
•a priority level,
•a pair of output values representing its left and right motor commands,
•an enable/disabled state indicator and
•a process name character string
•The prioritize() process cycles through the list of enabled processes, finds the one with the highest priority, and copies its motor output commands to the actual motors.
(copyright Prentice Hall 2001)

Robot Building Lab: Localization and Mapping
Review: Prioritization Algorithm: Data Structures
Data Structures:process_name[] process_priority[] holds the fixed priority values as assigned to the processes process_enable[] holds dynamic enable values
– Touch is enabled, since its priority level has been copied into the process_enable[] array. Turn is disabled, and Wander is always enabled
Left_motor[] and right_motor[] hold values assigned by the behavior tasks
– Even though Turn is disabled, its entries are still present in the motor arrays from a previous time. No need to clear them out
Active_process assigned by prioritize(), is zero, indicating that the process with an index 0—the touch sensor process—is active.
(copyright Prentice Hall 2001)

Robot Building Lab: Localization and Mapping
Today
Localization re-visitedSimple uncertainty correction with
landmarksLocal sonar mapsSensor fusion and global sonar maps

Robot Building Lab: Localization and Mapping
Review: Reducing Odometry Error with Absolute
Measurements Uncertainty Ellipses Change shape based on
other sensor information Artificial/natural
landmarks Active beacons Model matching –
compare sensor-induced features to features of known map – geometric or topological
(From Borenstein et. al.)
Robot Building Lab: Localization and Mapping
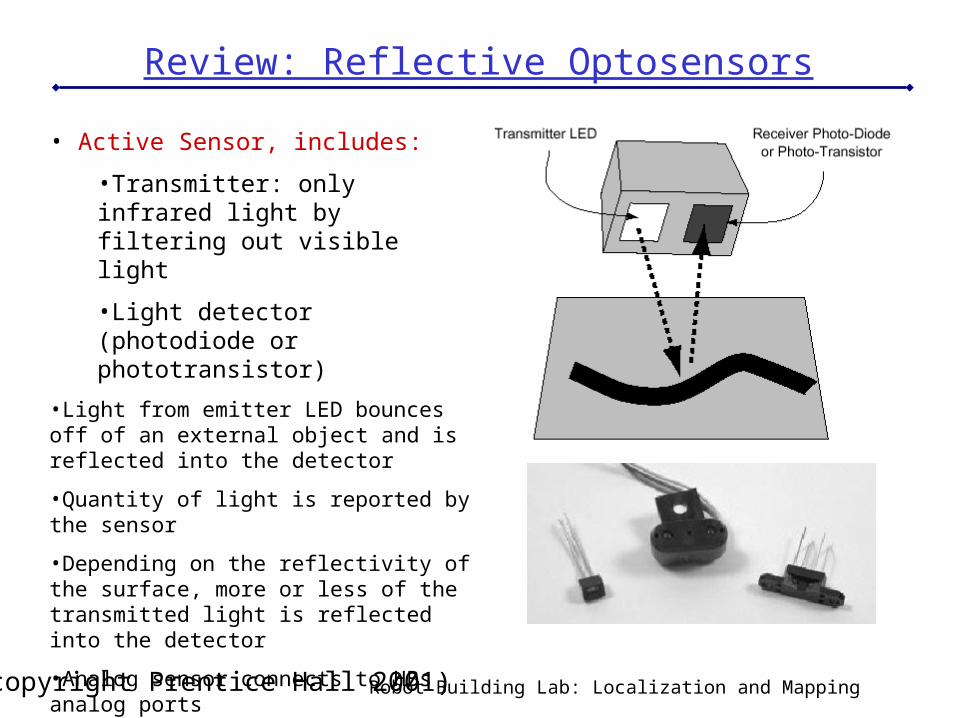
Review: Reflective Optosensors
• Active Sensor, includes:
•Transmitter: only infrared light by filtering out visible light
•Light detector (photodiode or phototransistor)
•Light from emitter LED bounces off of an external object and is reflected into the detector
•Quantity of light is reported by the sensor
•Depending on the reflectivity of the surface, more or less of the transmitted light is reflected into the detector
•Analog sensor connects to HBs analog ports
(copyright Prentice Hall 2001)

Robot Building Lab: Localization and Mapping
Use of Infrared Ground Sensor

Robot Building Lab: Localization and Mapping
Correcting Localization with Landmarks
Keep track of (x,y,theta) between landmarks
Correct for absolute y (known) when ground sensor triggers landmark
Issues: – Uncertainty in x
and theta not corrected using this method
– Possible to confuse landmarks

Robot Building Lab: Localization and Mapping
Today
Localization re-visitedSimple uncertainty correction with
landmarksLocal sonar mapsSensor fusion and global sonar maps

Robot Building Lab: Localization and Mapping
Example Sonar Sweep
Distance measurements from circular sonar scan
What is robot seeing?

Robot Building Lab: Localization and Mapping
Detecting a Wall

Robot Building Lab: Localization and Mapping
Partitioning Space into Regions
Process sweeps to partition space into free space (white), and walls and obstacles (black and grey)

Robot Building Lab: Localization and Mapping
Grid-based Algorithm
Superimpose “grid” on robot field of view
Indicate some measure of “obstacleness” in each grid cell based on sonar readings

Robot Building Lab: Localization and Mapping
So how do we use sonar to create maps?
What should we conclude if this sonar reads 10 feet?
10 feet
there is something somewhere around here
there isn’t something here
Local Mapunoccupied
occupied
or ...no information
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Sonar Modelingresponse model (Kuc)
sonar reading
obstacle
c = speed of sound
a = diameter of sonar element
t = time
z = orthogonal distance
= angle of environment surface
• Models the response, hR,with
• Then, add noise to the model to obtain a probability:
p( S | o )
chance that the sonar reading is S, given an obstacle at
location o
z =
S
o
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Typical Sonar Probability Model
(From Borenstein et. Al.)
Robot Building Lab: Localization and Mapping
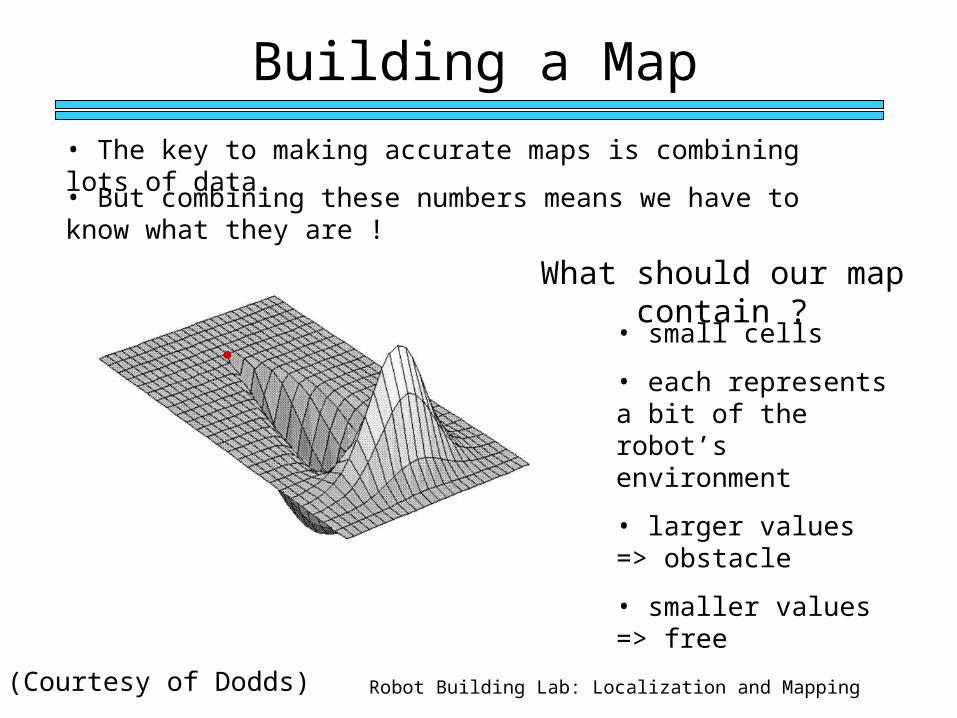
Building a Map
• The key to making accurate maps is combining lots of data.
• But combining these numbers means we have to know what they are !
What should our map contain ?
• small cells
• each represents a bit of the robot’s environment
• larger values => obstacle
• smaller values => free
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Today
Localization re-visitedSimple uncertainty correction with
landmarksLocal sonar mapsSensor fusion and global sonar maps

Robot Building Lab: Localization and Mapping
Using sonar to create maps
What should we conclude if this sonar reads 10 feet...
10 feet
and how do we add the information that the next sonar reading (as the robot moves) reads 10 feet, too?
10 feet
(Courtesy of Dodds)
Robot Building Lab: Localization and Mapping
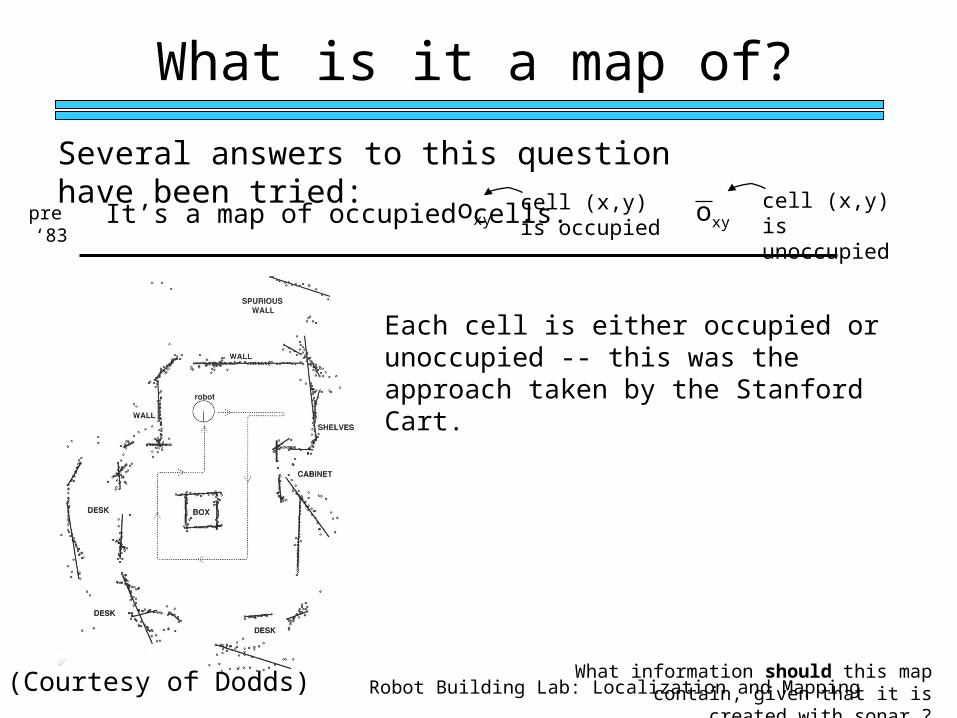
What is it a map of?
Several answers to this question have been tried:
It’s a map of occupied cells. oxy oxy cell (x,y) is occupied
cell (x,y) is unoccupied
Each cell is either occupied or unoccupied -- this was the approach taken by the Stanford Cart.
pre ‘83
What information should this map contain, given that it is created with
sonar ?
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Several answers to this question have been tried:
It’s a map of occupied cells.
It’s a map of probabilities: p( o | S1..i )
p( o | S1..i )
The certainty that a cell is occupied, given the sensor readings S1, S2, …, Si
The certainty that a cell is unoccupied, given the sensor readings S1, S2, …, Si
oxy oxy cell (x,y) is occupied
cell (x,y) is unoccupied
• maintaining related values separately?
• initialize all certainty values to zero
‘83 - ‘88
pre ‘83
What is it a map of ?
• contradictory information will lead to both values near 1 • combining them takes some work...
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Several answers to this question have been tried:
It’s a map of occupied cells.
It’s a map of probabilities: p( o | S1..i )
p( o | S1..i )
It’s a map of odds.
The certainty that a cell is occupied, given the sensor readings S1, S2, …, Si
The certainty that a cell is unoccupied, given the sensor readings S1, S2, …, Si
The odds of an event are expressed relative to the complement
of that event.
odds( o | S1..i ) = p( o | S1..i )p( o | S1..i )
The odds that a cell is occupied, given the sensor readings S1, S2, …,
Si
oxy oxy cell (x,y) is occupied
cell (x,y) is unoccupied
‘83 - ‘88
pre ‘83
What is it a map of ?
probabilities
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
An example map
units: feetEvidence grid of a tree-lined outdoor path
lighter areas: lower odds of obstacles being present
darker areas: higher odds of obstacles being present
how to combine them?(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Conditional probability
Some intuition...
p( o | S ) = The probability of event o, given event S .The probability that a certain cell o is occupied, given that the robot sees the sensor reading S .
p( S | o ) = The probability of event S, given event o .The probability that the robot sees the sensor reading S, given that a certain cell o is occupied.
• What is really meant by conditional probability ?
• How are these two probabilities related?
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Bayes Rule
p( o S ) = p( o | S ) p( S )
- Conditional probabilities
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Bayes Rule
- Bayes rule relates conditional probabilities
p( o | S ) = p( S | o ) p( o )
p( S )Bayes rule
p( o S ) = p( o | S ) p( S )
- Conditional probabilities
(Courtesy of Dodds)
p( o S ) = p( S | o ) p( o )

Robot Building Lab: Localization and Mapping
Bayes Rule
- Bayes rule relates conditional probabilities
p( o | S ) = p( S | o ) p( o )
- So, what does this say about
p( S )Bayes rule
odds( o | S2 S1 ) ?
p( o S ) = p( o | S ) p( S )
- Conditional probabilities
Can we update easily ?
(Courtesy of Dodds)
p( o S ) = p( S | o ) p( o )

Robot Building Lab: Localization and Mapping
Combining evidence
So, how do we combine evidence to create a map?
What we want --
odds( o | S2 S1) the new value of a cell in the map after the sonar reading S2
What we know --
odds( o | S1) the old value of a cell in the map (before sonar reading S2)
p( Si | o ) & p( Si | o ) the probabilities that a certain obstacle causes the sonar reading Si
(Courtesy of Dodds)
Robot Building Lab: Localization and Mapping
Combining evidence
odds( o | S2 S1) = p( o | S2 S1 )
p( o | S2 S1 )
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
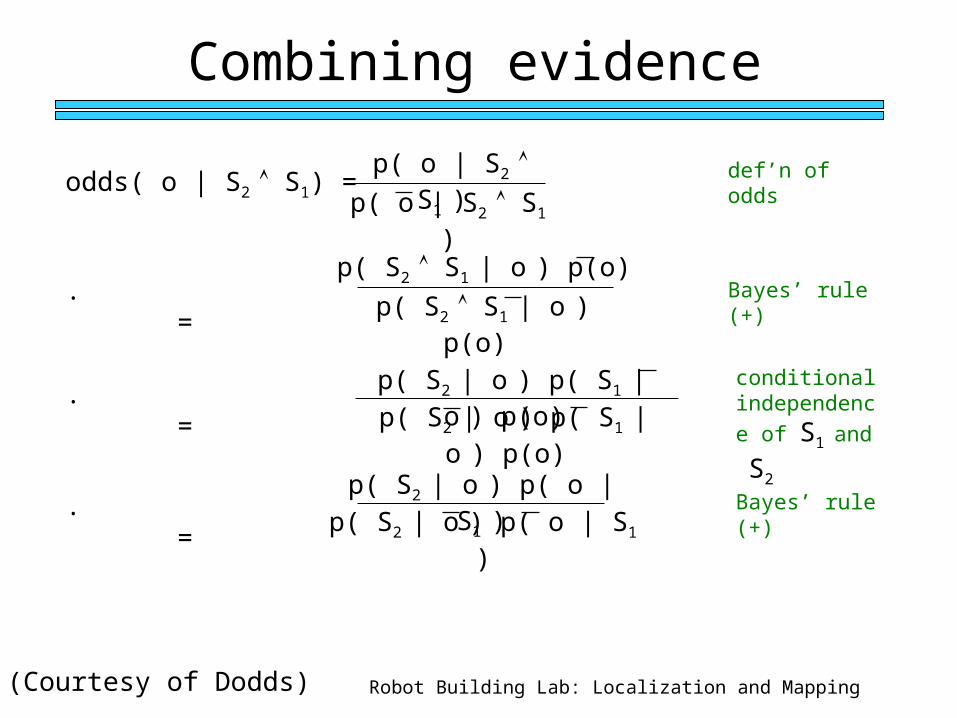
Combining evidence
odds( o | S2 S1) = p( o | S2 S1 )
p( o | S2 S1 )
. = p( S2 S1 | o ) p(o)
p( S2 S1 | o ) p(o)
def’n of odds
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
p( S2 | o ) p( S1 | o ) p(o)
Combining evidence
odds( o | S2 S1) = p( o | S2 S1 )
p( o | S2 S1 )
. =
. =
p( S2 S1 | o ) p(o)
p( S2 S1 | o ) p(o)
p( S2 | o ) p( S1 | o ) p(o)
def’n of odds
Bayes’ rule (+)
(Courtesy of Dodds)
Robot Building Lab: Localization and Mapping
p( S2 | o ) p( S1 | o ) p(o)
Combining evidence
odds( o | S2 S1) = p( o | S2 S1 )
p( o | S2 S1 )
. =
. =
. =
p( S2 S1 | o ) p(o)
p( S2 S1 | o ) p(o)
p( S2 | o ) p( S1 | o ) p(o)
def’n of odds
Bayes’ rule (+)
conditional independence of S1 and
S2
p( S2 | o ) p( o | S1 )p( S2 | o ) p( o | S1 ) Bayes’ rule
(+)
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
p( S2 | o ) p( S1 | o ) p(o)
Combining evidence
odds( o | S2 S1) = p( o | S2 S1 )
p( o | S2 S1 )
. =
. =
. =
p( S2 S1 | o ) p(o)
p( S2 S1 | o ) p(o)
p( S2 | o ) p( S1 | o ) p(o)
Update step = multiplying the previous odds by a precomputed weight.
def’n of odds
Bayes’ rule (+)
conditional independence of S1 and
S2
p( S2 | o ) p( o | S1 )p( S2 | o ) p( o | S1 ) Bayes’ rule
(+)
previous oddsprecomputed valuesthe sensor model
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Evidence grids
hallway with some open doors
known map and estimated evidence grid
lab space
CMU -- Hans Moravec(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Path Planning in Evidence Grids
Reduces to a search problem within the graph of cells, and the graph is created on the fly.
Search for a minimum-cost path, depending on
•length
•probability of collision
(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Robot Mapping
represent space as a collection of cells, each with the odds (or probability) that it contains an obstacle
Lab environment
not surelikely obstacle
likely free space
• The relative locations of the robot within the map are assumed known.• It is important that the robot odometry is correct
• Equally plausible to consider the converse problem...
Evidence Grids...
Given a map of the environment, how do I determine where I am?
“Robot localization problem”(Courtesy of Dodds)

Robot Building Lab: Localization and Mapping
Alternative Mapping Method: Vector field histogram
Faster than using probabilities Makes assumptions and approximations Uses certainty values in each grid cell rather
than occupancy probabilities Rather than update all cells in range, only
those on line of site of sensor are updated with increment if near range reading and decrement below range reading
Cells bounded below and above (eg 0,10) Key observation: by taking rapid readings, this
method approximates a probability distribution by sampling the real world

Robot Building Lab: Localization and Mapping

Robot Building Lab: Localization and Mapping
Vector Field Histogram Superimpose “grid” on robot
field of view Indicate some measure of
“obstacleness” of grid cell based on sonar readings
For each reading, update cells in line of sight of sonar– increment cells near reading– decrement cells below reading
Cells bounded below and
above (eg 0,10) Re-evaluate position with
odometry as robot moves Decay values over time Key observation: by taking
rapid readings, this method approximates a probability distribution by sampling the real world

Robot Building Lab: Localization and Mapping
Building Map With Odometry
(From Thrun et. Al.)

Robot Building Lab: Localization and Mapping
Building Global Maps
Exploration strategy– Or explore while doing
something else, like light following
Combining multiple maps
Odometry error Decaying confidence
over time/movement Accuracy versus use
and timeliness

Robot Building Lab: Localization and Mapping
Lab 8
Localization and Mappinghttp://plan.mcs.drexel.edu/courses/robotlab/labs/lab08.pdf

Robot Building Lab: Localization and Mapping
Find Goal, Build Map
Record initial position Head toward goal light Take sonar sweeps and
odometry readings and build map as you move
Fix odometry errors with landmarks (using ground sensors)
Output map to host View graphically

Robot Building Lab: Localization and Mapping
http://plan.mcs.drexel.edu/cgi-bin/legorobots/occgrid.cgi

Robot Building Lab: Localization and Mapping
Lab 8: Localization and Mapping
In-class lab overview:– Modify behavior/priority-based controller to continually
update pose (x,y,theta) -- Using kinematic equations, modified to use motor commands – show results on LCD display to TA
– Build local map using sonar sweeps and odometry – move toward a single obstacle for a short period of time
– Use vector field histogram assumptions and small grid– Use combination of theta of robot and angle of sonar to
determine line-of-sight for sonar reading – (Download serial communications libraries to IC libs,
Download terminal program to X:\ and install)– Dump local map to PC – use Joe’s tool to display and
show to TA

Robot Building Lab: Localization and Mapping
TWO Weeks Take-home part of Lab
– Modify behavior/priority-based controller to continually update pose (x,y,theta) • Using kinematic equations, modified to use motor commands • Using landmark detection (ground sensing) to correct errors in y-direction
– Follow light, avoid and react to obstacles, AND build map1. Light following, 2. Sonar closeup reaction (bumper), and 3. Sonar sample obstacle avoidance and tracking 4. (Could add real bumper detection and IR now if you want/have ports)
– Dump local map to PC – use Joe’s tool to display – Use vector field histogram assumptions, experiment with decaying,
see how large a grid you can handle on HandyBoard Read on-line documents; answer questions for Week 8 on Plan Grad students need to include software design document for their final
project, code that can be re-used from close, pseudo-code for new functions
No class Wednesday BUT we have two Monday sessions prior to next class Lab 10: Off-line processing and Path planning using maps

Robot Building Lab: Localization and Mapping
Lab 8 ProgramsGlobal variables for:
light state, collision state, obstacle state, ground state
Function to determine encoder state (done) Function to move toward left (done)Function to move toward right (done)Function for forward kinematics (done)Function to move toward target-heading (home)Function to detect sonar close-up state (in-class)Function to react to collision (done for bumpers)Function to determine sonar sample state (in-class)Function to avoid and track obstacles (done for IR)Function to put local sonar reading onto map as fn of location/angleFunction to dump map to PC and graph (home)Function to use ground state to recognize obstacles (home)
void main(void) { calibrate ground state, light state
input headingstart servo and sonar
start processes to keep track of: pose, collision, obstacle, ground states(with good use of defer)behavior/priority based control program to switch between:
light following, collision reaction, obstacle avoidance – according to priority scheme(at home)
}

Robot Building Lab: Localization and Mapping
References
http://plan.mcs.drexel.edu/courses/robotlab/labs/lab08.pdf
http://plan.mcs.drexel.edu/courses/robotlab/readings/hbmanual.pdf
http://plan.mcs.drexel.edu/courses/readings