Risk The Road to Eliminating Operator-Related Dynamic Positioning...
23
Risk The Road to Eliminating Operator-Related Dynamic Positioning Incidents Arjen Tjallema – Bluewater Energy Services BV Clemen van der Nat – Bluewater Energy Services BV Hugo Grimmelius – Delft University of Technology Douwe Stapersma - Delft University of Technology October 9-10, 2007 Return to Session Directory Return to Session Directory
Transcript of Risk The Road to Eliminating Operator-Related Dynamic Positioning...
Risk
The Road to Eliminating Operator-Related Dynamic Positioning Incidents
Arjen Tjallema – Bluewater Energy Services BVClemen van der Nat – Bluewater Energy Services BVHugo Grimmelius – Delft University of TechnologyDouwe Stapersma - Delft University of Technology
October 9-10, 2007Return to Session DirectoryReturn to Session Directory

MTS DP Conference -- Houston 2007
The Road to Eliminating Operator Related DP Incidents
Arjen Tjallema . Hugo Grimmelius . Clemens Van Der Nat . Douwe Stapersma

2MTS DP Conference -- Houston 2007
Introduction
• Operator involved in majority of DP incidents
• Nature of DP incidents• Role of DP operator• Modes of operation• Monitoring DP
Return to Session Directory
3MTS DP Conference -- Houston 2007
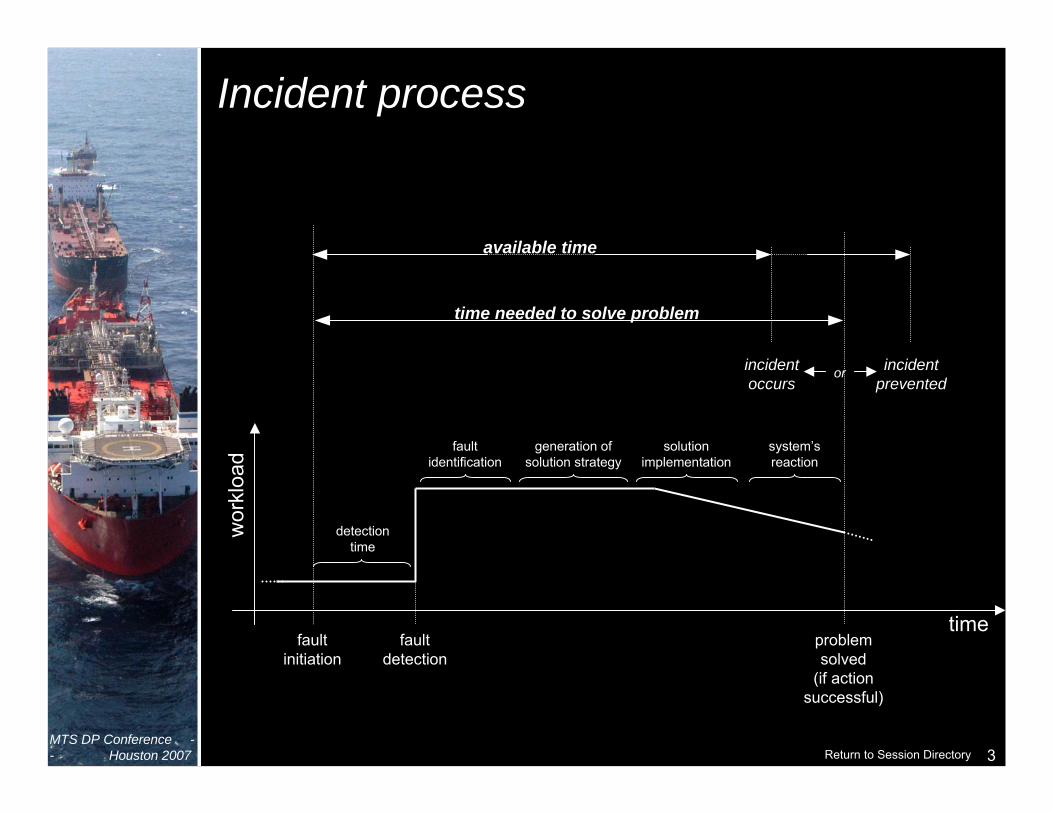
Incident process
time
wor
kloa
d
faultinitiation
faultdetection
detectiontime
faultidentification
generation ofsolution strategy
system’sreaction
available time
incidentoccurs
time needed to solve problem
incidentprevented
or
solutionimplementation
problemsolved
(if action successful)
Return to Session Directory
4MTS DP Conference -- Houston 2007
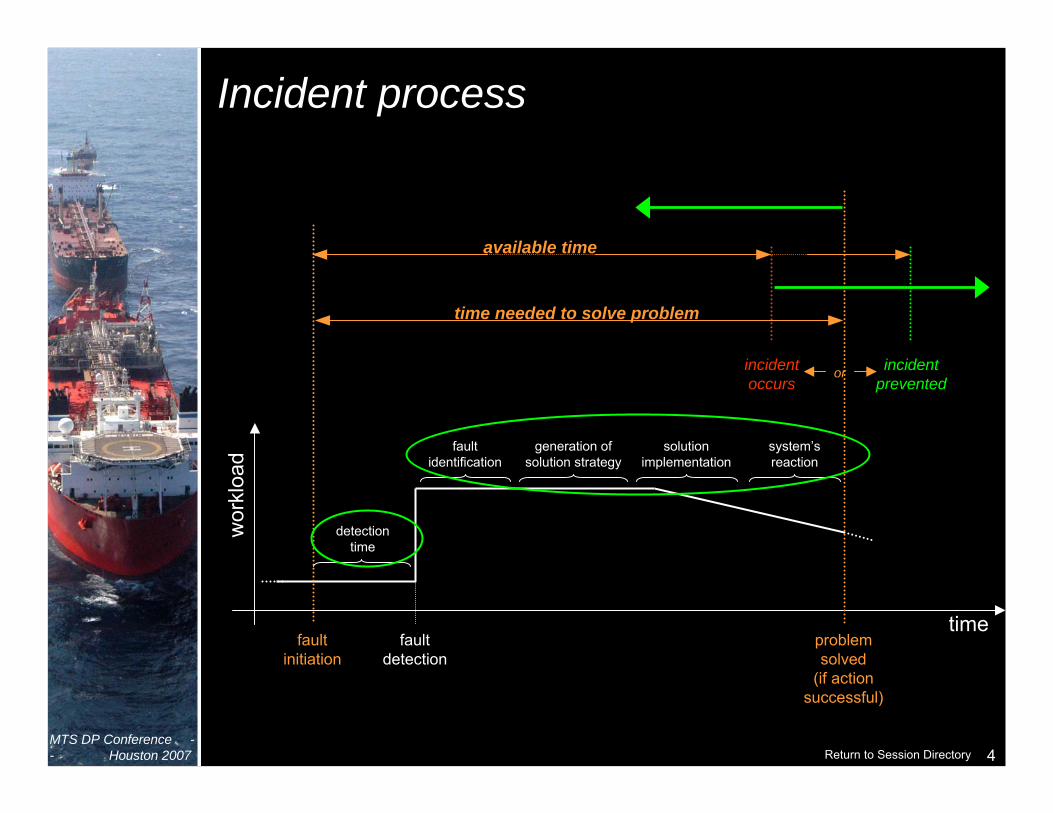
Incident process
time
wor
kloa
d
faultinitiation
faultdetection
detectiontime
faultidentification
generation ofsolution strategy
system’sreaction
available time
incidentoccurs
time needed to solve problem
incidentprevented
or
solutionimplementation
problemsolved
(if action successful)
Return to Session Directory
5MTS DP Conference -- Houston 2007
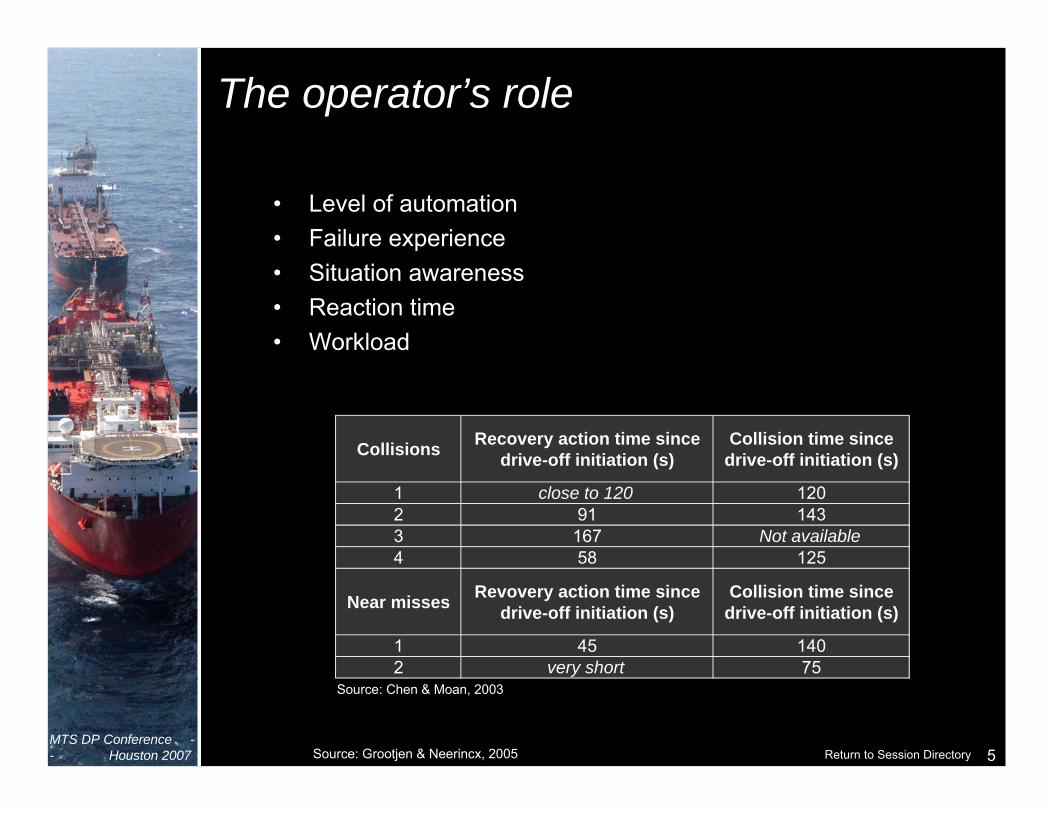
The operator’s role
• Level of automation• Failure experience• Situation awareness• Reaction time• Workload
Collisions Recovery action time since drive-off initiation (s)
Collision time since drive-off initiation (s)
1 close to 120 1202 91 1433 167 Not available4 58 125
Near misses Revovery action time since drive-off initiation (s)
Collision time since drive-off initiation (s)
1 45 1402 very short 75
Source: Chen & Moan, 2003
Source: Grootjen & Neerincx, 2005 Return to Session Directory
6MTS DP Conference -- Houston 2007
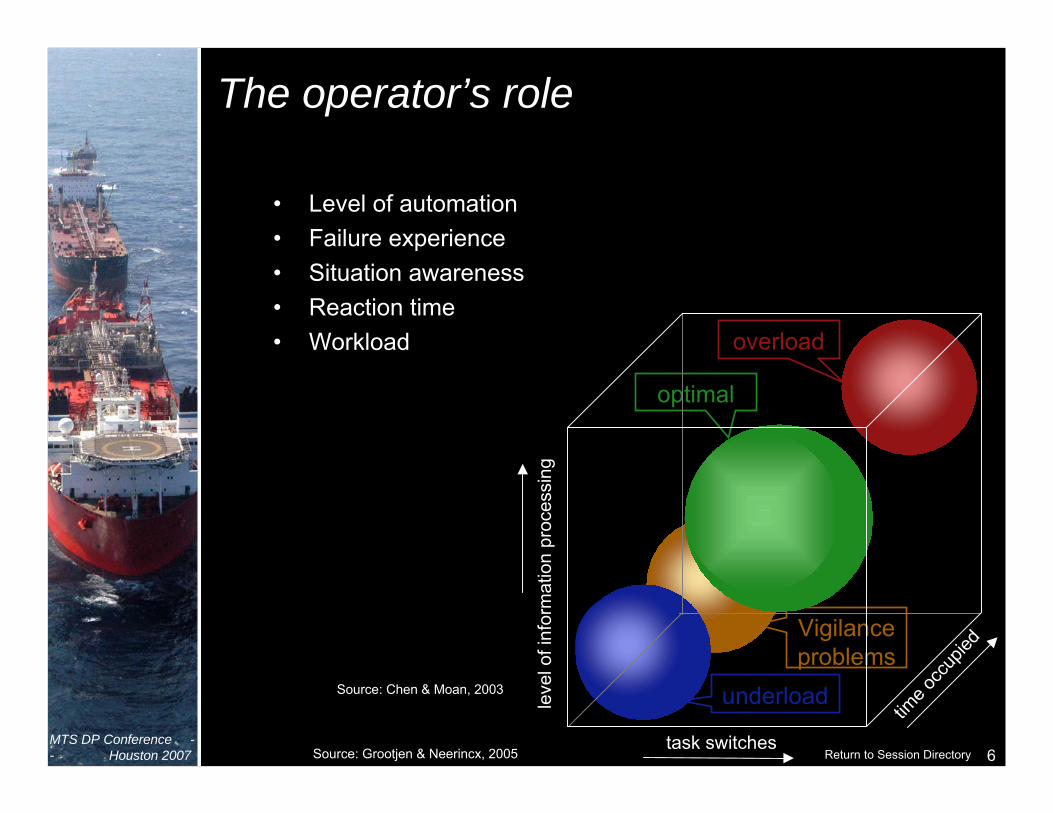
The operator’s role
• Level of automation• Failure experience• Situation awareness• Reaction time• Workload overload
Vigilance problems
optimal
underload
task switches
time o
ccup
ied
leve
l of i
nfor
mat
ion
proc
essi
ng
Source: Chen & Moan, 2003
Source: Grootjen & Neerincx, 2005 Return to Session Directory

7MTS DP Conference -- Houston 2007
Workload in DP operations
overload
Vigilance problems
optimal
underload
task switches
time o
ccup
ied
leve
l of i
nfor
mat
ion
proc
essi
ng
normal operation
fault in DP system
changingcircumstances
Source: Grootjen & Neerincx, 2005 Return to Session Directory

8MTS DP Conference -- Houston 2007
Modes of operation
normal operationLow workload
DP system can operate autonomously
alerted operationNormal workload
Operation as is currently done
emergency situationHigh workload
Operator support
Return to Session Directory

9MTS DP Conference -- Houston 2007
• Operator only monitoring• Workload very low
• DP system takes over operator’s task• Self-monitoring system
• Unattended operation– Operator can perform other tasks– Normal workload
• After fault detection: emergency mode
Modes of operation
normal operation
Return to Session Directory

10MTS DP Conference -- Houston 2007
Modes of operation
alerted operation
Return to Session Directory
• Situation with relatively high risk– Offloading / bad weather
• Self-monitoring system not reliable enough• Similar to current DP operations

11MTS DP Conference -- Houston 2007
• Operator called to DP system• Very high workload
• DP system supports operator in five phases:1. Fault detection2. Fault identification3. Generation of solution strategy4. Implementation of solution strategy5. System’s reaction
Modes of operation
emergency situation
Return to Session Directory

12MTS DP Conference -- Houston 2007
New functions
• To enable three modes of operation:– Self-monitoring for normal operation– Operator support for emergency situation
Return to Session Directory
13MTS DP Conference -- Houston 2007
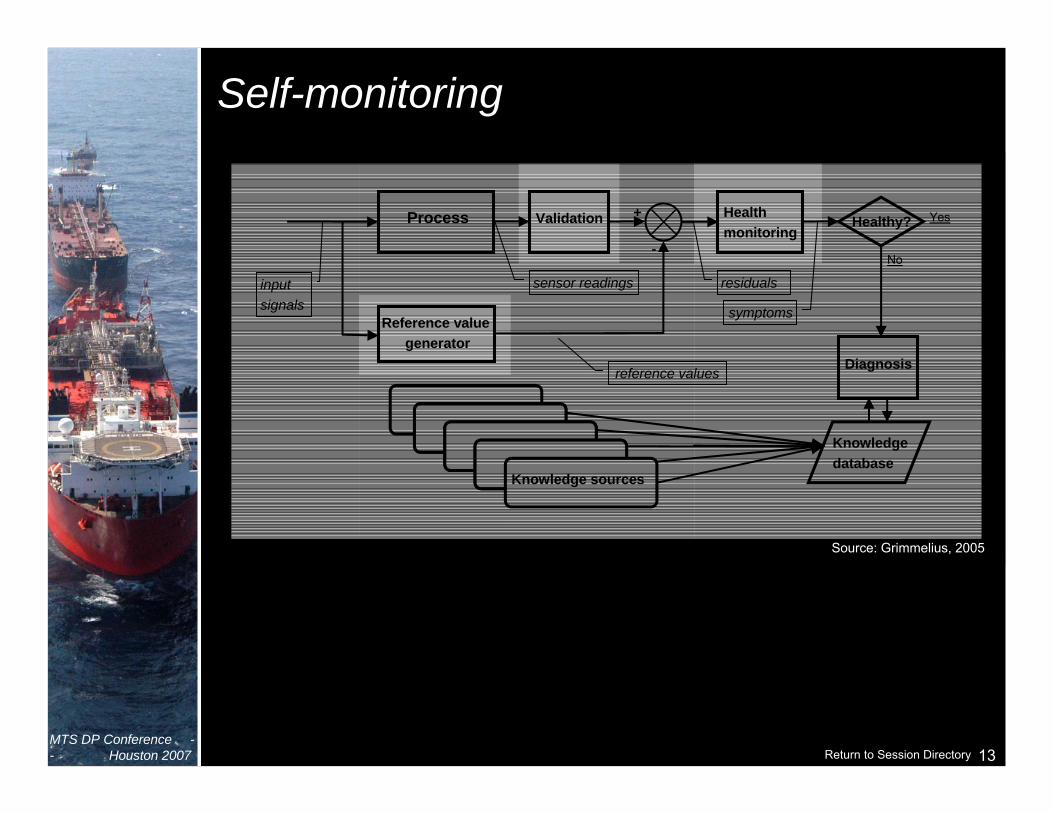
Self-monitoring
Validation Healthmonitoring
Plant Healthy?
Reference value generator
+
-
Yes
Diagnosis
Knowledgedatabase
Knowledge sources
reference values
residuals
symptoms
sensor readingsinputsignals
No
Process
Source: Grimmelius, 2005
Return to Session Directory

14MTS DP Conference -- Houston 2007
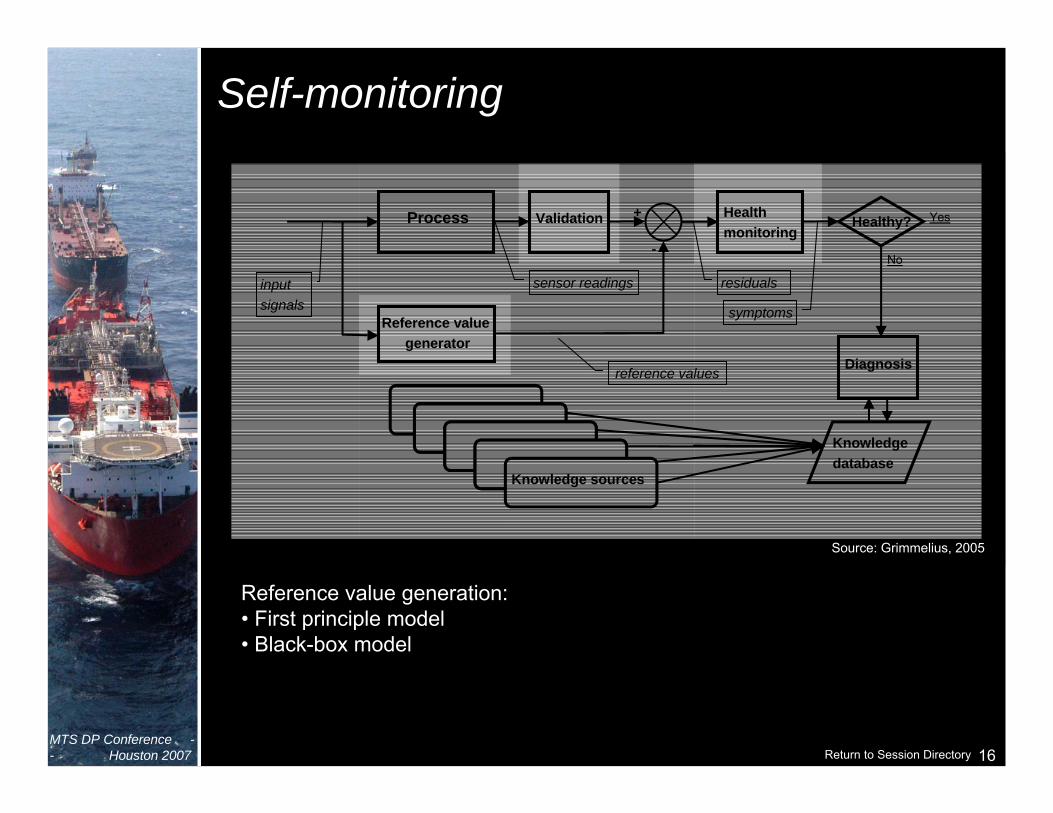
Self-monitoring
Validation Healthmonitoring
Plant Healthy?
Reference value generator
+
-
Yes
Diagnosis
Knowledgedatabase
Knowledge sources
reference values
residuals
symptoms
sensor readingsinputsignals
No
Process
Validation:• Sensor self-check• Compare sensors
Source: Grimmelius, 2005
Return to Session Directory

15MTS DP Conference -- Houston 2007
Self-monitoring
Validation Healthmonitoring
Plant Healthy?
Reference value generator
+
-
Yes
Diagnosis
Knowledgedatabase
Knowledge sources
reference values
residuals
symptoms
sensor readingsinputsignals
No
Process
Health monitoring:• Threshold on residuals• Level of threshold determines reliability
Source: Grimmelius, 2005
Return to Session Directory
16MTS DP Conference -- Houston 2007
Self-monitoring
Validation Healthmonitoring
Plant Healthy?
Reference value generator
+
-
Yes
Diagnosis
Knowledgedatabase
Knowledge sources
reference values
residuals
symptoms
sensor readingsinputsignals
No
Process
Reference value generation:• First principle model• Black-box model
Source: Grimmelius, 2005
Return to Session Directory
17MTS DP Conference -- Houston 2007
Self-monitoring
Validation Healthmonitoring
Plant Healthy?
Reference value generator
+
-
Yes
Diagnosis
Knowledgedatabase
Knowledge sources
reference values
residuals
symptoms
sensor readingsinputsignals
No
Process
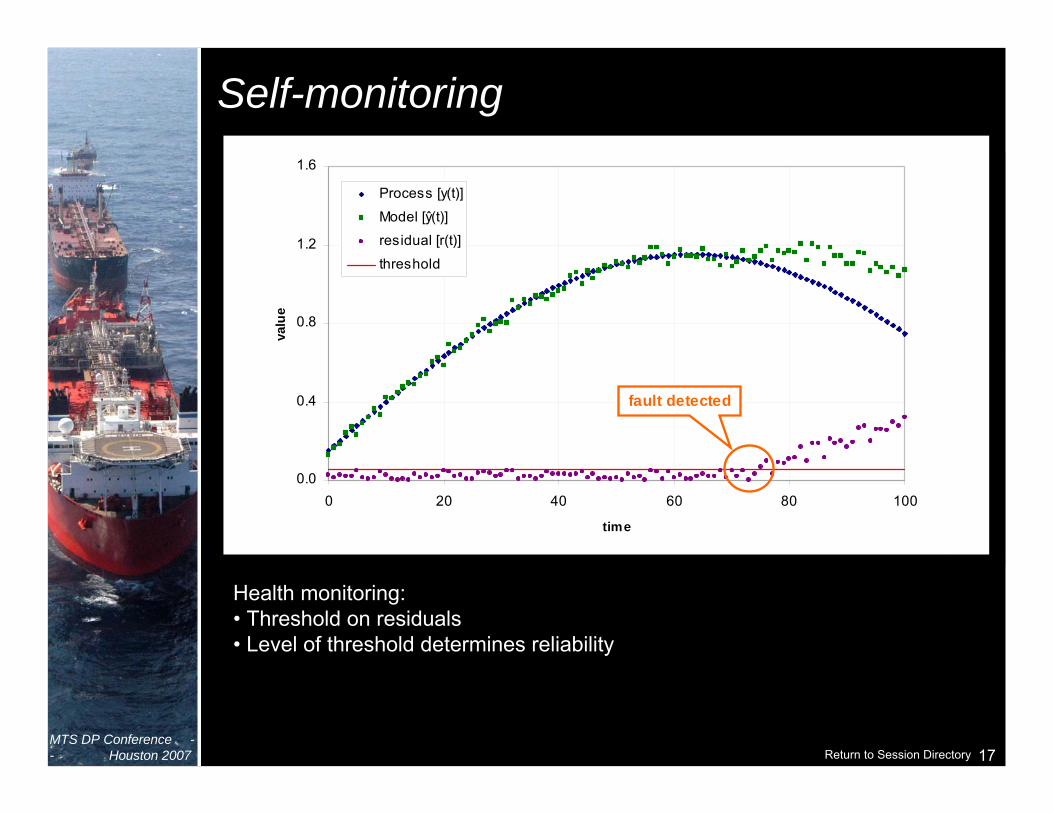
Health monitoring:• Threshold on residuals• Level of threshold determines reliability
0.0
0.4
0.8
1.2
1.6
0 20 40 60 80 100
time
valu
e
Process [y(t)]
Model [ŷ(t)]residual [r(t)]
threshold
fault detected
Source: Grimmelius, 2005
Return to Session Directory

18MTS DP Conference -- Houston 2007
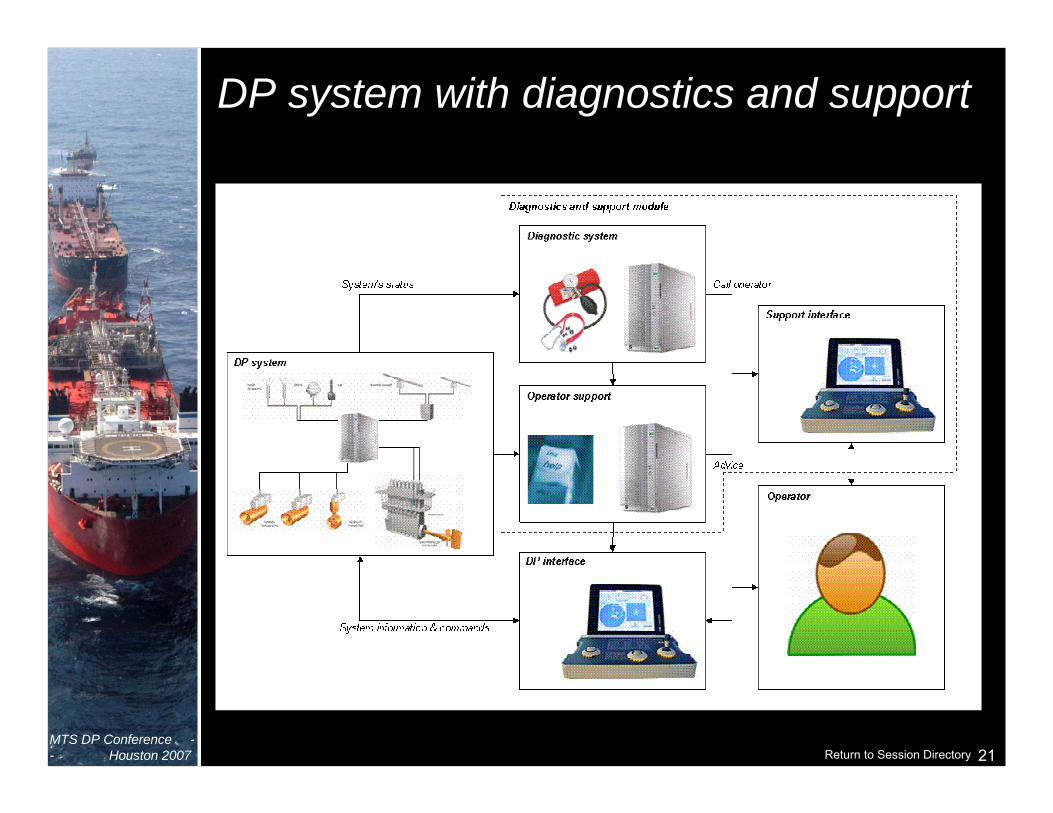
Implementation of diagnostics
DP system
ship response
dp computer
monitoringsystem
consistency check
reference based verification
alarm
call operator if suspect behaviour detected
control signals
analyze detected symptoms
operator support
sensors
environment
reference value generator
Return to Session Directory

19MTS DP Conference -- Houston 2007
Operator support
• Presentation of system status– Operator has to ‘familiarize’– Low situation awareness due to unattended operation
• Solving a detected problem– Analyze detected problem to find cause– Generate solution strategies– Predict effect of strategies– Present advice to operator
Return to Session Directory
20MTS DP Conference -- Houston 2007
Requirements and risks
• Fault detection:– Operator to be called in case of any fault– To many false alarms harm functionality
• Quick operator familiarization after fault detection
• Online simulation:– Trade off: accuracy vs. computational power
Return to Session Directory
21MTS DP Conference -- Houston 2007
DP system with diagnostics and support
Return to Session Directory

22MTS DP Conference -- Houston 2007 [email protected] Return to Session Directory


















