Risk Identification and Risk Assessment of Air Taxi Operations for … · 2020-07-10 ·...
13
2020-3814-AJTE-MEC 1 Risk Identification and Risk Assessment of Air Taxi 1 Operations for Large-Scale Urban Air Mobility 2 3 Urban Air Mobility (UAM) is a developing concept in the aviation industry 4 that promises to deliver safe, efficient, and accessible on-demand air 5 transportation within a metropolitan area. In this paper, we identify and 6 assess the hazards involved with this new, large-scale air transportation 7 system. An on-demand air service, similar to ground on-demand 8 transportation services, requires matching the customer location to the 9 closest takeoff and landing area (TOLA) where they can travel in their 10 reserved aircraft. Requirements for TOLA locations are that they need to be 11 widespread and easily accessible within the metropolitan area, thus 12 allowing the customer to onboard and offboard close to their destination. 13 This novel concept requires creative air vehicle solutions to be developed for 14 this unique mission profile, characterized by short/vertical takeoff and 15 landing, short/medium-range cruise depending on the size of the 16 metropolitan area, and small/medium payloads. The flexibility in mission 17 design required by this novel concept can be achieved using electric air 18 vehicles that will transport the customers to and from TOLAs, due to the 19 recent advancements in battery technology and distributed electric 20 propulsion (DEP). DEP allows more freedom in aircraft configuration 21 design and can be used to accommodate a wider range of mission types. In 22 particular, vertical takeoff and landing (VTOL), short takeoff and landing 23 (STOL), and conventional takeoff and landing (CTOL) concepts are being 24 explored in industry. It is crucial to identify and assess the impact of each 25 challenge and prioritize risk mitigation planning, implementation, and 26 progress monitoring early on to ensure that the issues that can hinder the 27 successful implementation of a large-scale urban air mobility network are 28 addressed. This paper will focus on identifying the hazards that will have the 29 greatest impact on the air taxi industry. Then a risk assessment will be 30 completed to identify the hazards that pose an extremely high risk to large- 31 scale urban air mobility. 32 33 Keywords: urban air mobility, risk assessment 34 35 36 Introduction 37 38 Science fiction movies and cartoons have depicted the idea of flying cars 39 as a futuristic transportation system, but can recent advancements in 40 technology allow for urban air mobility (UAM) to become a viable option? 41 Many visionaries forecast a future that holds a streamlined aerial vehicle 42 network that can take individuals anywhere at any time [Zawodny]. 43 Entrepreneurs, engineers, and government officials are working together to 44 bring forward the concept, but are discovering hurdles that could threaten or 45 wipe out this industry. 46 UAM promises to deliver safe, efficient, and accessible on-demand air 47 transportation within a metropolitan area. In this paper, we identify and assess 48
Transcript of Risk Identification and Risk Assessment of Air Taxi Operations for … · 2020-07-10 ·...

2020-3814-AJTE-MEC
1
Risk Identification and Risk Assessment of Air Taxi 1
Operations for Large-Scale Urban Air Mobility 2
3
Urban Air Mobility (UAM) is a developing concept in the aviation industry 4
that promises to deliver safe, efficient, and accessible on-demand air 5
transportation within a metropolitan area. In this paper, we identify and 6
assess the hazards involved with this new, large-scale air transportation 7
system. An on-demand air service, similar to ground on-demand 8
transportation services, requires matching the customer location to the 9
closest takeoff and landing area (TOLA) where they can travel in their 10
reserved aircraft. Requirements for TOLA locations are that they need to be 11
widespread and easily accessible within the metropolitan area, thus 12
allowing the customer to onboard and offboard close to their destination. 13
This novel concept requires creative air vehicle solutions to be developed for 14
this unique mission profile, characterized by short/vertical takeoff and 15
landing, short/medium-range cruise depending on the size of the 16
metropolitan area, and small/medium payloads. The flexibility in mission 17
design required by this novel concept can be achieved using electric air 18
vehicles that will transport the customers to and from TOLAs, due to the 19
recent advancements in battery technology and distributed electric 20
propulsion (DEP). DEP allows more freedom in aircraft configuration 21
design and can be used to accommodate a wider range of mission types. In 22
particular, vertical takeoff and landing (VTOL), short takeoff and landing 23
(STOL), and conventional takeoff and landing (CTOL) concepts are being 24
explored in industry. It is crucial to identify and assess the impact of each 25
challenge and prioritize risk mitigation planning, implementation, and 26
progress monitoring early on to ensure that the issues that can hinder the 27
successful implementation of a large-scale urban air mobility network are 28
addressed. This paper will focus on identifying the hazards that will have the 29
greatest impact on the air taxi industry. Then a risk assessment will be 30
completed to identify the hazards that pose an extremely high risk to large-31
scale urban air mobility. 32
33
Keywords: urban air mobility, risk assessment 34
35
36
Introduction 37
38
Science fiction movies and cartoons have depicted the idea of flying cars 39
as a futuristic transportation system, but can recent advancements in 40
technology allow for urban air mobility (UAM) to become a viable option? 41
Many visionaries forecast a future that holds a streamlined aerial vehicle 42
network that can take individuals anywhere at any time [Zawodny]. 43
Entrepreneurs, engineers, and government officials are working together to 44
bring forward the concept, but are discovering hurdles that could threaten or 45
wipe out this industry. 46
UAM promises to deliver safe, efficient, and accessible on-demand air 47
transportation within a metropolitan area. In this paper, we identify and assess 48

2020-3814-AJTE-MEC
2
the hazards involved with this new, large-scale air transportation system. On-1
demand air service will match the customer with the closest takeoff and 2
landing area (TOLA). This novel concept requires creative air vehicle solutions 3
to be developed for this unique mission profile, characterized by short/vertical 4
takeoff and landing, short/medium-range cruise depending on the size of the 5
metropolitan area, and small/medium payloads. The flexibility in mission 6
design required by this novel concept can be achieved using electric air 7
vehicles that will transport the customers to and from TOLAs, due to the recent 8
advancements in battery technology and distributed electric propulsion (DEP). 9
DEP allows more freedom in aircraft configuration design and can be used to 10
accommodate a wider range of mission types. In particular, vertical takeoff and 11
landing (VTOL), short takeoff and landing (STOL), and conventional takeoff 12
and landing (CTOL) concepts are being explored in industry. It is crucial to 13
identify and assess the impact of each challenge and prioritize risk mitigation 14
planning, implementation, and progress monitoring early on. This will ensure 15
that the issues that can hinder the successful implementation of a large-scale 16
urban air mobility network are addressed. 17
It has been estimated that hundreds of vehicle concepts are being 18
developed by established and emerging companies for UAM missions 19
(National Academies of Sciences, Engineering, and Medicine 2020). There are 20
several use cases for the UAM industry, but this paper will focus on the air taxi 21
use case defined by the transportation of the passenger and luggage from point 22
A to point B in an urban metropolitan area (Volocopter MediaCenter). It will 23
be assumed that the aircraft is powered by a rechargeable battery in 24
conjunction with an electric motor. This power option is the most likely to 25
occur because it allows for flexibility in vehicle design by implementing DEP. 26
A battery- powered aircraft is also more cost-efficient and environmentally 27
friendly compared to a traditionally fueled aircraft. Also, the aircraft is 28
assumed to be able to achieve vertical takeoff and landing. This will set the 29
stage for the type of infrastructure that urban planners will be required to build 30
to accommodate a large-scale air transportation model. Cities must prepare an 31
environment to rapidly develop, test, and safely integrate this new technology. 32
Safety is a top priority, so a detailed review of possible hazards can aid in 33
diverting attention to risk mitigation planning. 34
This paper begins with a literature review identifying the hazards that will 35
have the greatest impact on the air taxi industry. Methodology describing how 36
a risk assessment matrix will be compiled to identify the hazards that pose an 37
extremely high risk to large-scale urban air mobility will be presented. The 38
results will present the assessment of the probability of occurrence and severity 39
of impact for each identified hazard, then illustrate the risk assessment matrix 40
to highlight the hazards that pose the highest level of risk. It will conclude with 41
the final remarks. 42

2020-3814-AJTE-MEC
3
Literature Review of Hazards 1
2
A risk assessment will be used to identify the issues that are most critical 3
and require more attention. To achieve this, hazards must be identified and 4
defined. The hazards that will be discussed in this paper are listed below: 5
6
Noise Pollution 7
Battery Technology 8
Autonomous Technology 9
Cybersecurity 10
Public Approval 11
Testing Grounds 12
Regulations 13
Weather 14
Economics 15
TOLAs 16
17
Hazards can be categorized by separating them into technical and non-18
technical groups. For example, a hazard that requires more engineering, 19
research, and development will be categorized as a technical hazard. Hazards 20
that require public education, paperwork, lobbying, and other forms of 21
solutions will fall into the non-technical group. It should be noted that not all 22
hazards are identified in this paper, but only those that appear to be widely 23
discussed in the UAM industry. 24
25
Technical Hazards 26
27
Noise Pollution 28
Noise pollution in densely populated urban environments poses a serious 29
threat to the UAM industry. Noise frequency and range contribute to the 30
acoustic footprint of an aerial vehicle. The large noise footprint that will come 31
with an increasing number of operating air taxis may dissuade communities 32
from accepting UAM technology. So, it is vital to improve the design of the 33
vehicle and reduce the noise that the public would classify as an annoyance. 34
Currently, the industry is trying to address how to measure the acoustic 35
footprint of small unmanned systems (sUAS) [Zawodny]. Note that all noise is 36
not considered an annoyance by the public. High tip speeds contribute to tonal 37
noise, which may be noise that can be perceived as an annoyance. However, 38
another part of the noise footprint is known as broadband noise, which is the 39
result of turbulent flow on or near the blade and can also pose a challenge for 40
sUAS with multiple rotors [Zawodny]. Research to reduce noise for small 41
UAVs is being carried out by both private and public sectors. Uber Elevate’s 42
claims that a low disc loading, and low rotor tip speed will produce quieter 43
aircraft (Uber). The combination of broadband and tonal noise must be 44
assessed for each aircraft configuration to check if it can meet a publicly 45
accepted standard for noise. 46

2020-3814-AJTE-MEC
4
Battery Technology 1
A fully electric propulsive system provides a more cost-efficient and eco-2
friendly option over fossil fuel propulsion systems; however, battery-powered 3
technology comes with limitations. Batteries are limited by their specific 4
energy density and specific power density. Lithium polymer batteries are 5
currently the key for all-electric aircraft (Courtin). However, this technology 6
has posed thermal runway and energy storage problems (Courtin). Li-air 7
batteries show promise in terms of potential for specific energy densities but 8
require filters and storage tanks for the pure oxygen it requires to expend the 9
battery’s energy (Ma). An additional cost to using non-aqueous Li-air batteries 10
is the mass gain throughout the flight due to battery discharge (Ma). For large 11
batteries, this weight gain can be significant, and adversely affect the aircraft 12
performance of the weight-sensitive air taxis. Al-air batteries is another option 13
for aviation applications, though it also comes with a drawback. Al-air batteries 14
have major losses in capacity during recharging and might be more effective if 15
recycled after use (Umeshbabu). It may require the addition of a recycling 16
station to the takeoff and landing areas (TOLA). Al-air also results in mass 17
gain during discharge, requires H2O to expend the batteries, and storage tanks 18
to hold the H2O (Umeshbabu). The Li-S, a non-metal air option, has lower 19
specific energy than the previously mentioned options, but still has a relatively 20
high energy density compared to other batteries on the market. It uses Sulphur, 21
an environmentally friendly and inexpensive material, which is also safer to 22
handle (Umeshbabu). Although battery technology has proven to be capable and 23
effective, research and development must continue to take place to make it a 24
more viable option for this type of air taxi mission. 25
26
Autonomous Technology 27
Current software for autonomous operation is not mature enough for large 28
scale UAM applications and produces challenges in communications and 29
navigation. A typical approach to developing software allows room for error 30
and bugs that are addressed with patches after the software is released for use, 31
but this process will not work for this use case. It is vital, to begin with a set of 32
requirements that will ensure a safe software system (National Academies of 33
Sciences, Engineering, and Medicine 2020). The software programmed will be 34
used for integrated air traffic management, collision avoidance, contingency 35
management, weather, and wind pattern updates (National Academies of 36
Sciences, Engineering, and Medicine 2020). Integrated air traffic management 37
refers to the UAM network communicating to local air traffic controllers of all 38
the operating vehicles that are in its class, owners of each vehicle, the current 39
location of each vehicle, and route of each vehicle in real-time. Multiple 40
classes of air vehicle traffic must be integrated within one network for the 41
successful long-term large scale UAM system to function (National Academies 42
of Sciences, Engineering, and Medicine 2020). Collision avoidance, an issue that 43
will require a detect-and-avoid software to be installed on each air taxi, must be 44
able to autonomously navigate the aircraft. Underestimated threats include 45
collisions with birds or other unregistered drones with the purpose to harm. 46

2020-3814-AJTE-MEC
5
The system must be able to detect-and-avoid such threats. Next, contingency 1
management software is required to aid in cases of a communications system 2
outage, other electronic system outages, or network breach. Changing weather 3
and wind patterns also demand software applications to determine the best 4
route for UAM operations. A complication for this application would be the 5
need to develop advanced analysis tools to track wind patterns through a city’s 6
profile, update it continuously, communicate it to the air taxi, and integrate it 7
into the decision-making matrix of the autonomous software. Another point of 8
interest is the type of safety engineering tools that must be developed to test 9
software for a multivariable application of this magnitude (National Academies 10
of Sciences, Engineering, and Medicine 2020). A combination of existing and 11
emerging software will be required to ensure a safe system that can be used to 12
navigate and communicate. 13
14
Cybersecurity 15
A software-heavy system that sends mission-critical information through 16
wireless networks calls for a high level of cybersecurity. The loss of an aerial 17
vehicle to adversaries due to lacking security can lead to a threat to national 18
security, so securing the network to hundreds of drones poses a major hurdle to 19
the success of a large scale UAM network (Javaid). Preventing the breach of 20
onboard networks and code, attack on air traffic control datalinks, the 21
introduction of incorrect data in machine learning, or critical decision-making 22
is of extreme importance (National Academies of Sciences, Engineering, and 23
Medicine 2020). Modeling for UAM communication networks is challenging 24
because it contains channels of different types, range of communication, 25
different power requirements for different devices, multiple types of data 26
flows, and varying integrity of equipment (Javaid). Therefore, establishing a 27
system with high-security levels can be a challenging endeavor. 28
29
Non-Technical Hazards 30
31
Public Approval 32
A successful operation will depend on widespread public approval, which 33
relies on educating the people about this new technology and eliminating 34
misunderstandings. UAVs have had a bad reputation due to the on-board 35
cameras often needed for navigation. The public is threatened by the possibility 36
of abuse and infringement of their privacy rights as citizens. Public discussion 37
about how video footage will be used should take place to relieve any 38
hesitations that the city’s people may have about dozens of air taxis with 39
cameras flying above them. Besides, the visual and noise pollution caused by a 40
large network of air taxis may pose a problem in the early stages of 41
development. Another public concern could be the usability of the air taxi 42
services. Heavy public participation in testing can bring forth any unforeseen 43
issues. For example, air taxis may not be accessible with people with 44
disabilities and may need additional accommodations to include all members of 45
the community. The perceived safety of the UAM system is another major 46

2020-3814-AJTE-MEC
6
barrier. High safety ratings, testing, and public education may help ease 1
concerns. The public must be a part of the discussions of acceptable levels of 2
noise and visual hindrances that the air taxis may contribute to. A public 3
opinion survey can be used as a way to periodically analyze public perception 4
throughout the development of the UAM industry, and assess the need for 5
discussion/education programs to be installed. It can be concluded that regular 6
communication must take place between the major players in the industry and 7
the general public to have a favorable outcome for all parties involved. 8
9
Testing Grounds 10
A high safety rating will be a top priority, which may require developing 11
more accessible testing grounds (National Academies of Sciences, Engineering, 12
and Medicine 2020). It has been discussed that there is a lack of low-risk 13
environments that can be used to test air taxi technology. Airspace and 14
facilities for new air vehicle design are needed for rapid design modifications 15
to develop. Typically, conventional aircraft design relies on a database of 16
historical data, but a database of data does not exist yet for this class of aircraft. 17
So, a low-risk testing environment will permit data gathering and promote safe 18
aircraft configurations, aircraft certification, and operating standards (National 19
Academies of Sciences, Engineering, and Medicine 2020). Improving the 20
perception of safety can show aid in the acceptance of this new technology. 21
22
Regulations 23
Gaps in the existing regulations may pose a threat to rapidly growing the 24
UAM industry. A thermal runway is a short circuit in batteries resulting in a 25
fire or combustion but can be regulated using containment systems (Courtin). 26
Although it is not considered a safety incident, current regulation still requires 27
a demonstration of a battery’s thermal runway, which can cause delays in the 28
certification of electric aerial vehicles (Courtin). For certain types of batteries, 29
identifying the amount of useful energy in a battery. Regulations may need to 30
be developed to monitor a battery’s history and accurately determine the 31
reserves before takeoff. There will be significant barriers to certifying 32
autonomous aircraft because it will require regulations for complex navigations 33
systems, sensors, and other previously discussed challenges. These gaps will 34
need to be addressed to assist in certifying all-electric autonomous vehicles that 35
will be used for UAM. 36
37
Weather 38
Weather is a non-technical challenge that will likely disrupt air taxi 39
operations. Adverse weather currently requires aircraft to be grounded, and 40
similar regulations will probably be implemented for the UAM industry. 41
However, if weather interrupts operations frequently, then it will cause 42
economic and passenger safety issues. This may also contribute to unfavorable 43
public opinion. Ideally, there is minimal adverse weather, low winds, no winter 44
weather, and moderate temperatures throughout the year (Goyal). Unfortunately, 45
this is not always the case in the majority of locations, and it can affect the 46

2020-3814-AJTE-MEC
7
locations in which UAM will be able to operate in full capacity. For example, 1
US urban areas in California, Arizona, and Texas will have more favorable 2
weather year-round which is ideal for large scale development. Other cities 3
may not be prioritized for adopting UAM technology due to weather 4
constraints. 5
6
Economics 7
The economic feasibility of a UAM network is a topic of discussion for the 8
public and private investors. Competition with existing modes of transport and 9
emerging modes of transport such as fast trains, shared electric and 10
autonomous cars will create a need for affordable UAM services (Goyal). Not 11
only will air taxis have to be affordable for the average citizen, but also be able 12
to adapt for new use cases. There is potential for UAM to expand into 13
providing other services depending on the technology advancement timeline 14
and demand. Some examples include providing aerial security for cities with 15
high crime rates, transporting urgently needed medical items, or scientific 16
research (Goyal). Adopting other use cases will make the UAM economically 17
resilient and flexible, which will attract additional investors to this market. 18
19
TOLAs: Operation and Infrastructure 20
Takeoff and landing areas, TOLAs, used as the loading and unloading 21
zone for air taxis need to be integrated with other transportation modes for an 22
efficient solution. TOLAs are often envisioned as towers located in convenient 23
locations throughout the urban area for UAM operations. However, the 24
locations must be easily accessible by the public. Other transportation modes, 25
such as autonomous automobiles, can be used to connect passengers from their 26
current location to nearby TOLAs. A seamless system that integrates multiple 27
transportation modes to the UAM network will be necessary for effective 28
mobility. Another challenge for TOLA operation is the lack of oversight and 29
policy, as the buildings will need to follow international fire and building 30
codes, which may cause time delays and cost constraints. In addition, the 31
security of TOLAs will also require attention during design and construction. If 32
not, then the UAM will put the passengers, aerial vehicles, and communities at 33
high risk. Passengers and visitor’s security screening will need to be time-34
efficient not to hinder operations, and the current airport model might not be a 35
viable solution. Therefore, to operate an efficient UAM network, TOLAs must 36
safely be able to host multiple air taxis, provide charging stations, and safe 37
areas for passengers to wait in a high-security environment. 38
39
40
Methodology for Risk Assessment 41
42
Each hazard identified in the previous section is assessed in this section to 43
determine the potential risks that will cause damage to a large scale UAM 44
industry. Risk is defined as the possible loss in terms of probability and 45
severity (Naval Safety Center). For example, parking in a busy grocery store 46

2020-3814-AJTE-MEC
8
parking lot poses some risk of a car accident. Risk is lessened if the car is 1
driven slowly, caution is exerted, and the car is parked farther away from the 2
grocery store. Risk is increased if the car is surpassing the speed limit, without 3
exerting caution, and parked in a spot with a lot of traffic. Risk is zero if the car 4
is not driven at all. A risk assessment will allow the driver to select a safe 5
parking spot that is at a reasonable distance from the entrance to the grocery 6
store. 7
The following tables depict the scale that will be used to assess how often 8
a hazard will occur and how severe the impact will be when it occurs. Table 1 9
illustrates the scale for the probability of occurrence that goes from frequent 10
occurrence to unlikely occurrence, based on the FAA Probability Scale (Naval 11
Safety Center). The risks are classified on a scale 0-100, divided into five 12
different intervals, with range 81-100 rating a hazard that has probability to 13
occur very often and 0-20 rating a hazard that is unexpected to occur. 14
15
Table 1. FAA Probability Scale 16
Numerical
Range
Scale Probability Define
81-100 A Frequent Probably will occur very often
61-80 B Likely Probably will occur often
41-60 C Occasional Expected to occur occasionally
21-40 D Seldom Expected to occur on a rare basis
0-20 E Unlikely Unexpected, but might occur
Source: Naval Safety Center. 17
18
Table 2 illustrates the scale for the severity of impact if a hazard does 19
occur, and ranges from catastrophic to negligible, based on the FAA Severity 20
Scale (Naval Safety Center). The risks are classified on a scale 0-100, divided 21
into four different intervals, with range 75-100 rating a hazard that has 22
catastrophic potential outcomes and range 0-25 rating a hazard that creates 23
negligible damage. 24
25
Table 2. FAA Severity Scale 26
Numerical
Range
Severity Define
75-100 Catastrophic Loss of life; complete equipment loss
50-75 Critical Accident level of injury and equipment
damage
25-50 Moderate Incident to minor accident damage
0-25 Negligible Damage probably less than accident or
incident levels
Source: Naval Safety Center. 27

2020-3814-AJTE-MEC
9
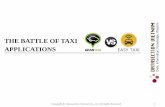
The combination of the probability and severity scales can be used to 1
assemble a risk assessment matrix as shown in Figure 1. The probability is 2
rated from frequent to unlikely in the x-axis, while the severity is rated from 3
negligible to catastrophic on the y-axis. The regions are split into four levels of 4
risk: extremely high, high, medium, and low. The low-risk region includes 5
hazards that have negligible, moderate, or critical severe probability with 6
seldom or unlikely occurrence. The more frequent these hazards occur, the 7
higher the risk level they will be placed in. 8
9
Figure 1. Risk Assessment Matrix Example 10
11 Source: Naval Safety Center. 12
13
Once each hazard is assessed, the ones that pose an extremely high risk 14
can be identified, and risk mitigation plans can be assembled for the hazards 15
that threaten the greatest risk. 16
17
18
Results and Discussion 19
20
This section will assess each hazard by assigning a value for the probability 21
and severity. First, the hazards are ranked based on their probability of occurrence, 22
shown in Table 3, using the scale described in the previous section. 23
24
Table 3. Probability of Occurrence 25
Hazard Probability Reasoning
Noise Pollution 90 The presence of noise from rotors/fans
is expected from all aircraft concepts.
Battery Technology 25 Catastrophic battery failure is expected
to occur rarely.
Autonomous Technology 50 System failure is expected to occur
occasionally.

2020-3814-AJTE-MEC
10
Cybersecurity 25 Security breach expected to occur on
rare basis.
Public Approval 70
The positives are expected to outweigh
the negatives for most UAM markets;
however, disapproval is expected to
occur rarely.
Testing Grounds 15
Interest is expected to drive the
construction of testing grounds. It is
unexpected that this will come with
great opposition.
Regulations 70
Vehicle designs will be challenged often
and changing regulations may occur
very slowly inhibiting rapid vehicle
development.
Weather 50
Rain, storms, and adverse weather
conditions are expected to occur
occasionally.
Economics 30
Competing technology is expected to
rarely threaten the market, and low costs
will create a strong demand. The UAM
market’s flexibility to serve other use
cases will also strengthen this market.
TOLA 15
It is expected that with existing
technology, TOLAs can be constructed,
integrated with other transportation
modes, and secured.
1
Noise has the highest probability of occurring because almost all aircraft 2
designs implement a propeller or rotor as a part of their electric propulsion 3
system. The least probable hazards are interest in developing testing grounds 4
and TOLAs. It is assumed that the infrastructure needed to operate is high and 5
will be funded by public and private entities. Next, each hazard was assessed 6
based on the severity of impact when it unfolds and is shown in Table 4 below. 7
8
Table 4. Severity of Impact 9
Hazard Severity Reasoning
Noise Pollution 45
It is unlikely that this will cause major
issues as much research is being
conducted to reduce noise to acceptable
levels.
Battery Technology 85
Battery failure will result in catastrophic
damages to the passenger, payload, and
aircraft.
Autonomous Technology 75
Autonomous software development,
testing, certification, and regulation will
be challenging. Technology failure can
cause significant damage to the aircraft,
passenger, and/or public.
Cybersecurity 90 Cybersecurity breaches by an adverse
party is a catastrophic event.

2020-3814-AJTE-MEC
11
Public Approval 25
Public approval issues can be resolved
through proper education and local
community participation.
Testing Grounds 60
Inadequate testing facilities produce low
technology confidence levels and may
lead to critical failure.
Regulations 60 Delays in the timeline—threatens the
feasibility of large scale UAM operations.
Weather 35
Weather patterns may be predicted but
can lead to grounding all aircraft and
pausing operations. May lead to economic
losses and minor damages.
Economics 20
There are diverse use cases that this
technology can be applied, which may
forgo economic losses of investment in
the air taxi industry
TOLA 30 Minor damages may be caused if the
TOLAs are managed poorly.
1
In Table 4, a software breach due to failure in cybersecurity has the 2
potential to cause the most damage. The economic losses due to running an air-3
taxi are predicted to have the lowest severity. The reasoning behind this rating 4
is that the technology developed using the investment can be used for other 5
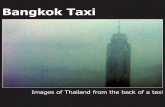
applications outside of the air taxi industry. Figures for both probability and 6
severity were combined to produce the risk matrix in Figure 2. 7
8
Figure 2. Risk Assessment Matrix 9
10
11
This simplified risk assessment matrix was assembled based on a similar 12
model described in the previous section. Note that the probability axis is 13
reversed and reads 100 to 0 from left to right. This is based on the model risk 14
matrix which reads from frequent to unlikely. 15
Risk levels include extremely high, high, medium, and low displayed in 16
the main area of the matrix. The hazards in the high-risk category include noise 17
Extremely High High Medium Low

2020-3814-AJTE-MEC
12
pollution, regulations, autonomous technology, cybersecurity, and battery 1
technology. Autonomous technology, cybersecurity, and battery technology 2
occur seldomly or occasionally while having the potential for causing 3
catastrophic damage. These hazards describe a situation where there is a total 4
loss in control of the aircraft due to adversaries or spontaneous failure. The 5
level of risk will remain the same unless there is a breakthrough in technology. 6
A timeline obstruction caused by regulatory guidelines is likely to occur and 7
can cause critical damage to the industry. Entrepreneurs may lose interest if the 8
government does not work to adapt to this new aviation sector. However, if the 9
government is quick to establish a system to streamline the certification of air 10
taxis, then the level of risk will decrease. Then there is the constant noise 11
pollution that will be present and may cause some minor damage to public 12
opinion and health. Research is being conducted to lower noise levels and may 13
reduce the severity of this hazard. Weather poses a medium level risk and can 14
move to a higher or lower risk level based on weather prediction technology 15
development. Also, if the location of operation sees increasingly severe 16
weather due to the global warming crisis, this hazard will pose a greater risk. 17
Higher temperatures and extreme weather may require air taxis designs that are 18
more resilient and adaptive for safe operation. Public approval, economics, 19
TOLAs, and development of testing grounds all pose a low-level risk. The 20
economic risk is low due to the diversification of use cases for UAM 21
technology and is predicted to reduce the risk level of this hazard. 22
Development of testing grounds and TOLA infrastructure are both unlikely to 23
occur but can cause moderate or critical damage. These two risks may increase 24
if there is a delay in development due to strict certification requirements or an 25
increase in construction/labor costs. Public approval may occur more 26
frequently than the other hazards in the low-risk level category, however, the 27
damage is negligible if it is managed effectively. But this risk can dramatically 28
increase to higher levels if it is not monitored or addressed regularly through 29
educational programs. The level of risks for the identified hazards will vary 30
based on the behaviors of the UAM industry over time. 31
32
33
Conclusions 34
35
UAM is an emerging idea in aviation pledging to provide safe, efficient, 36
and accessible on-demand air transportation. The design solutions are expected 37
to provide flexible electric air vehicles that will transport the customers to and 38
from TOLAs. It is crucial to identify and assess risks in the UAM industry and 39
prioritize risk mitigation planning, implementation, and progress monitoring 40
early on to ensure successful implementation. The assessment in this paper 41
illustrates the barriers that currently pose the highest level of risk. Which is, as 42
highlighted in the previous section, noise pollution, regulations, autonomous 43
technology, cybersecurity, and battery technology. It must be noted that this 44
assessment was based on current market discussions, trends, and technology. A 45
more detailed revaluation as the industry develops is necessary to effectively 46

2020-3814-AJTE-MEC
13
mitigate risk. The next step would be to form risk mitigation plans for hazards 1
with unacceptable levels of risk: high and extremely high risk. The level of 2
planning allows the industry to operate safely and efficiently—which is crucial 3
to the success of the UAM industry. 4
5
6
References 7
8
Zawodny, N. S., Boyd, D. D., and Burley, C. L., “Acoustic Characterization and 9
Prediction of Representative, Small-Scale Rotary-Wing Unmanned Aircraft System 10
Components,” NASA NF1676L-22587, May 2016. Available: https://ntrs.nasa.gov/ 11
search.jsp?R=20160009054 12
“Advancing Aerial Mobility: A National Blueprint”. National Academies of Sciences, 13
Engineering, and Medicine 2020. Washington, DC: The National Academies Press. 14
DOI = https://doi.org/10.17226/25646. 15
“Volocopter publishes white paper on urban air mobility,” Volocopter MediaCenter. 16
Available: https://press.volocopter.com/index.php/volocopter-publishes-white-paper-17
on-urban-air-mobility. 18
“Fast-Forwarding to a Future of On Demand Urban Air Transportation,” Uber, 2016. 19
Available: https://www.uber.com/us/en/elevate/ 20
Courtin, C., and Hansman, R. J., “Safety Considerations in Emerging Electric Aircraft 21
Architectures,” 2018 Aviation Technology, Integration, and Operations Conference, 22
2018. 23
Ma, Z., Yuan, X., Li, L., Ma, Z., Wilkinson, D., Zhang, L. and Zhang, J, "A review of 24
cathode materials and structures for rechargeable lithium–air batteries,” 2015. Energy 25
& Environmental Science, 8, 2144-2198. DOI=https://doi.org/10.1039/C5EE00838G 26
Umeshbabu, E., Zheng, B., and Yang, Y., “Recent progress in all-solid-state Lithium− 27
Sulfur batteries using high Li-Ion conductive solid electrolytes,” 2019. Electroche-28
mical Energy Reviews, 2 (2), 199-230. DOI = https://doi.org/10.1007/s41918-019-29
00029-3 30
Javaid, A.Y., Sun, W., Devabhaktuni, V. K., and Alam, M., "Cyber security threat analysis 31
and modeling of an unmanned aerial vehicle system," 2012 IEEE Conference on 32
Technologies for Homeland Security (HST), Waltham, MA, 2012, pp. 585-590. 33
DOI= 10.1109/THS.2012.6459914 34
Goyal, R., “Urban Air Mobility (UAM) Market Study,” NASA HQ-E-DAA-TN65181, 35
2018. Available: https://ntrs.nasa.gov/search.jsp?R=20190001472 36
“Risk Assessment,” Naval Safety Center, Federal Aviation Administration, 2020 [PDF 37
file]. Available: https://www.faa.gov/about/initiatives/maintenance_hf/library/docu 38
ments/media/hfacs/4_riskassessment.pdf. 39