Ring of Fire: Final Report - HJ...
49
Ring of Fire: Final Report ME72ab. Engineering Design Laboratory Instructor: Michael Mello Terms: Fall and Winter James Deacon Cormac O’Neill Hana Keller Hyung Ju Terry Suh
Transcript of Ring of Fire: Final Report - HJ...
-
Ring of Fire: Final ReportME72ab. Engineering Design Laboratory
Instructor: Michael Mello
Terms: Fall and Winter
James DeaconCormac O’Neill
Hana KellerHyung Ju Terry Suh
-
Ring of Fire: Team Members
James Deacon is a junior at Caltech studying mechanicalengineering and minoring in computer science. He is the Businesslead of the robotics team and likes to machine stuff. His hobbyis swimming, tennis, playing the piano, and going to the beach.James also enjoys hiking and has climbed Mount Whitney twice.
Cormac O’Neill is a junior at Caltech studying me-chanical engineering. He is currently the mechanical lead of therobotics team, and is interested in pursuing a career in aerospace.He continues to insist that the waterjet in the Spalding Machineshop is haunted.
Hana Keller is a junior at Caltech studying mechanicalengineering. She likes to help people and wants to be a doctor. Herhobbies include soccer and water polo. She also likes good foodsuch as quality sushi and chocolate, and cute pictures of dogs.
Hyung Ju Suh (Terry) is a junior at Caltech study-ing mechanical engineering and computer science. He likes to doresearch in problems in robotics, and is interested in pursuing acareer as a robotics researcher and entrepreneur. His hobby is toplay the guitar, and has two single albums under his name.
-
Contents
1 Introduction & Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.1 ME72 Tank Wars: Introduction 6
1.2 Game Rules & Objectives 61.2.1 Course Layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.2 Game Rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Vehicles & Strategy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.1 Strategy Overview 82.1.1 Game Strategy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.1.2 Offensive Strategy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.1.3 Defensive Strategy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Vehicles 92.2.1 Initial Vehicle Strategy: 5 Base Plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2.2 Final Vehicle Strategy: 3 Base Plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Design Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.1 Design Strategy 11
3.2 Preliminary Design 113.2.1 General Ideas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.2.2 Transmission Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.2.3 Suspension Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.4 Control Scheme Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.2.5 Vehicle Weight & COM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.2.6 Preliminary Mechanical Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
-
3.3 Intermediate Design 193.3.1 Transmission Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3.2 Suspension Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.3.3 Shooting Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.3.4 Intermediate Mechanical Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.3.5 Gun Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 Final Design 243.4.1 Revised Tracks & Sprockets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.4.2 Final Vehicle Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.4.3 Final Gun Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.4.4 Electronics Layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.4.5 Autonomy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4 Construction & Manufacturing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.1 Design Iteration 1 314.1.1 Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.1.2 Suspension & Drivetrain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.1.3 Electronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.1.4 Final Vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2 Design Iteration 2 334.2.1 Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.2.2 Suspension & Drivetrain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.2.3 Gun Manufacturing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2.4 Final Assembled Vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Design Iteration 3 364.3.1 Tracks & Drivetrain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.3.2 Collision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.3.3 Electronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.3.4 Gun Manufacturing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.3.5 Final Vehicle Assembly . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5 Testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.1 Mobility Testing 39
5.2 Collision Testing 39
5.3 Gun Testing 41
6 Initial Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426.1 Mobility Demo 42
6.2 Scoring/Handling Demo I 43
6.3 Scoring/Handling Demo II 43
6.4 Mock Competition 43
-
5
7 Final Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 457.1 Results of the Competition 45
7.2 Broken Parts and Fixes 457.2.1 Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 457.2.2 Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 457.2.3 Electrical . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 467.2.4 Tracks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
7.3 Important Lessons Learned 46
8 Budget . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
-
1. Introduction & Background
1.1 ME72 Tank Wars: Introduction
The ME72 Tank Wars is the 33rd annual ME72 competition, with the theme of designing vehiclesthat can move effectively through various rugged trains, and shoot each other using NERF balls.Throughout many matches and games, important engineering aspects of vehicles will be tested suchas mobility, strength, reliability, and engineering effectiveness.
1.2 Game Rules & Objectives
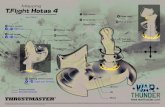
1.2.1 Course LayoutThe game takes place in a grass field with many obstacles to overcome, such as rumble strips, ramps,and seesaws. The ramps and seesaws are both designed to have up to a 30◦ incline. The game takes
Figure 1.1: Overview of the Battlefield
-
1.2 Game Rules & Objectives 7
place around 3 bases that each team has to hold to earn points. One base is located on the ramp whileanother is on the ground. These bases both have buttons that have to be pushed by a robot to becaptured for its team. The final base, the see-saw, is activated by flipping the see-saw and crossing apressure strip at the end of the see-saw. Each team (blue and red) starts in their designated area, andcan field up to 3 robots.
1.2.2 Game RulesThe game is decided by who wins the most points by taking hold of the bases. Different bases havedifferent point rates, depending on how difficult it is to claim the base.• Ramp : 1.75 pt/s• Ground: 1.375 pt/s• See-saw: 1.5pt/s
However, each team may invoke an offensive strategy in order to prevent another robot from holdinga base. This is done by using guns on the robots to fire NERF bullets at the opposing team’s vehicles.Each robot gets 5 ammos at the beginning of the competition, and each robot has 1 health-point (HP).A shot robot has to return to the base before it can respawn and get back to the field again.
The time span for each match is as follows: the game lasts for 4 minutes, and is divided into twosections. The first 40 seconds consists of an autonomous period and is immediately followed by 3minutes and 20 seconds of teleoperated control. Although 3 robots are fielded, if one team is unableto supply 3 robots and is down to 2, the other team gets a 15 second head-start in the match.
-
2. Vehicles & Strategy
2.1 Strategy Overview
In this section we will deal with how to plan our optimal strategy for the game.
2.1.1 Game StrategyWe can see from the rules that in order to win the game, understanding the point multiplier for eachbase is important. The ramp is the most valuable base as it has the highest weight, followed by thesee-saw, and then the ground. While there were originally 2 ground and 2 see-saw bases, in the finalcompetition this was reduced to 1 each. Leveraging this, we can see that our optimal strategy is toplace two robots at the ramp to completely hold it, and one at the see-saw. This, of course, assumesthat we can successfully prevent the opposing team from launching a successful siege of the ramp.Given the successful implementation of yaw and pitch we believe that this is the case.
2.1.2 Offensive StrategyOur offensive strategy assumes that we have an advantage over the other team. In this case the bestthing to do would be to go up and balance on the see-saw. This is a very good offense (as wellas defense) since this allows us to prevent the other team from accessing the see-saw base at all.Another advantage is that it allows for the see-saw robot to remain stationary while shooting towardsthe ground and ramp. On the ramp, we would place two robots to aggressively fight for the base.Since the ramp is a narrow corridor without much room to maneuver, we can leverage our robots’ability to aim and shoot, allowing for an offensive shooting strategy that disables other robots.
There is a slight modification to this strategy that can be used against teams who do notimmediately siege the ramp at full force. While one of the vehicles is battling for the seesaw andthe other is controlling the ramp, our third vehicle can park under the ammo loading station andsimply prevent the opposing team from gaining control of the ground base. This stops either teamfrom collecting any points from this base without requiring us to navigate the treacherous rumblestrip obstacles in order to take it ourselves. The robot can stay in the location until either needed onthe ramp, or the ground base is taken. In this strategy the ramp vehicles now have more ammo and
-
2.2 Vehicles 9
therefore can perform their role more effectively.
2.1.3 Defensive Strategy
The defensive strategy tries to assume that we won’t have any advantage over the other team as theydeploy their own offensive strategy. For the ramp, it is possible to play defensively by shooting 30◦
downwards sideways. This gives us a better mobility when traveling parallel to the edge of the ampwhile still being able to fire at attackers. Due to the design of most guns, most people are not ableto shoot up 30◦ incline when climbing upwards, which gives us a noatable advantage in terms ofshooting strategy.
If the see-saw is taken by the other team, the situation becomes more ambiguous. We canleverage the 3 vs. 2 situation to take control of the ground and the ramp, but we know that ourvehicles have difficulty navigating towards the ground base. With the large range of our shootingmechanism, it is also possible for us to shoot from the ramp or the ground and aim at the enemyrobot holding the see-saw. This idea was tested on Wednesday night and found to be quite easy to dowith our laser pointer aiming system. It is unclear weather the brightness of the sun will make seeingthe laser too difficult to be useful, however.
2.2 Vehicles
According to the strategy above, it is possible to designate different roles to different vehicles. Thesedesignations would, however, need to be flexible to adapt to shifting scenarios during competitionday.
2.2.1 Initial Vehicle Strategy: 5 Base Plan
When there were 5 bases, the strategy was to dedicate one robot to the ramp, one robot to theground,and one robot to the see-saw. Thus we initially designed three vehicles that were veryspecifically tuned for each role. This rough vehicle strategy is illustrated on the table below:
Table 2.1: Initial Vehicle SpecificationsVehicle Ramp Vehicle Ground Vehicle See-saw VehicleDrivetrain Tracks & Skid Steer Ackermann 6-Wheeled AckermannTransmission High Gear Ratio Low Gear Ratio High Gear RatioTurret 30◦ down sideways Fixed Fire Yaw & Pitch
Using these vehicles, we could employ a defensive strategy on the ramp by holding it andsieging it, aggressive strategy on the ground by trying to take two bases with the high speed of ourAckermann vehicle, and by positioning the final vehicle on the see-saw to act as the main shooterand support vehicle.
2.2.2 Final Vehicle Strategy: 3 Base Plan
While pursuing the above strategy, we encountered difficulties with the implementation of the threedistinct robots. The above strategy may have been ideal for the competition, but it was weak in termsof the feasibility of the design and reliability. Quickly realizing that it is better to have one perfectedvehicle and drivetrain, we standardized the drivetrain and chassis to have a single well-designed
-
10 Chapter 2. Vehicles & Strategy
platform. Instead, the guns were slightly modified between the vehicles to support different strategies.Final designs are tabulated below.
Table 2.2: Initial Vehicle SpecificationsVehicle Ramp Vehicle 1 Ramp Vehicle 2 See-saw VehicleDrivetrain Tracks & Skid Steer Tracks & Skid Steer Tracks & Skid SteerTransmission Low Gear Ratio Low Gear Ratio Low Gear RatioTurret 30◦ Yaw & Pitch Fixed Fire sideways 30◦ Yaw & Pitch
-
3. Design Process
3.1 Design Strategy
Our team approached the design process by breaking it up into different subsystems, and tryingto delineate them as much as possible so that the vehicle became modular and easy to assem-ble/disassemble. The different subsystems we have are listed in Table 3.1.
Table 3.1: Systems and SubsystemsSystem SubsystemMobility Transmission
SuspensionDrivetrainChassis
Shooting Shooting (Gun)Turret (Yaw & Pitch)Reloading
Electrical ControlElectronicsAutonomy
3.2 Preliminary Design
In this section we will discuss the preliminary design process that our team went through.
3.2.1 General IdeasInitially, the vehicle was designed to park on the ramp / seesaw incline. Thus we wanted to utilize aworm gear transmission, which would allow the vehicle to safely park when no torque is applied tothe worm. Additionally, we wanted to leverage linkages and shock pistons to implement suspension,
-
12 Chapter 3. Design Process
and use tracks and skid-steer to have good mobility on the ramp. In order to control both motors, weused ESCs that use a pwm signal to control the motor power, and the Raspberry Pi, which wouldcome in handy for communicating with USB devices such as our receiver. The overall idea for theinitial vehicle is illustrated in Table 3.2
Table 3.2: Initial Systems and SubsystemsSystem SubsystemMobility Transmission Worm gear
Suspension Shock piston and LinkageDrivetrain Tracks and SprocketChassis Double Walled Structure
Shooting Shooting (Gun) FlywheelTurret (Yaw & Pitch) 2DOF TurretedReloading Air-driven (Blower)
Electrical Control Skid-SteerElectronics ESC with Raspberry PiAutonomy Raspeberry Pi with Camera
3.2.2 Transmission AnalysisIn order to choose the motors and drivetrain, and to optimize for weight, it is essential that we comeup with a working model to describe the forces that affect the vehicle. For this purpose we can dividethe forces into two general ones: tractive effort, and total resistance. For this we can consider theforce diagram in Figure 3.1. Then we can set up a following equation:
Figure 3.1: Force diagram of a general vehicle climbing up a slope of α
Tractive Effort−Total Resistance = ma
To characterize the behavior further, the following assumptions will be made:1. Tractive effort always assumes maximum voltage input2. Vehicle rolls without slipping
Then first the tractive effort can be characterized into converting the motor torque to the absolutedriving force by the following equation:
FT =τmNηd
Rw=
NηdRw
τs(
1− ωmωNL
)
-
3.2 Preliminary Design 13
where FT is the tractive force, τm is the motor torque, N is the reduction gear ratio, ηd is the drivetrainefficiency, and Rw the wheel radius. Additional parameters come from the motor’s properties whereτs is the stall torque of the motor and ωNL is the no-load speed of the motor. Note the use of themotor torque-to-speed curve in the last part of the equation. Then by invoking the no-slip condition:
ωwheel =v
Rw=
ωmN
where v is the vehicle velocity, we are able to come up with a formula that relates the vehicle’s speedto the tractive force, given the parameters mentioned above:
FT =NηdRw
τs(
1− NRwωNL
v)
Additionally, we consider the total resistance to be a sum of three individual resistant forces: rollingresistance, air resistance, and grade resistance. First, rolling resistance can be characterized by thenormal force on the vehicle, as well as the material properties between the two surfaces. Given these,the equation given is
Fr =crnc
mgcosα
where cr is the rolling friction coefficient, and nc is the number of wheels on the vehicle. The rollingfriction coefficient is assumed to be around 0.1 as a safety factor.
Air drag resistance is classically modeled as
Fa =12
CDAρv2
where CD is a shape profile coefficient, A the projection area along the velocity vector, ρ the densityof air, and v the speed of the vehicle. For our purpose we assume a shape of a square with CD = 0.5.
Finally, grade resistance is defined as resistance due to the vehicle’s own weight, and the force issimply characterized by
Fg = mgsinα
Thus the former force equation on the vehicle can be generalized into the following equation:
NηdRw
τs(
1− NRwωNL
v)− cr
ncmgcosα− 1
2CDAρv2−mgsinα = mv̇
Since most of these parameters are available or can be estimated, we can put this equation intoMATLAB’s ode45 function to get a numerical approximation of the vehicle speed. From here therough acceleration and top speed can be observed. Additionally the current draw from the batteriescan be drawn from the motor current-speed curve. This will give a useful approximation in batterylife for the vehicles. Moreover the efficiency curve can be plotted - the measure of efficiency isequally as important as low efficiency is a sign of overheating.
With these information, we analyzed the motors and their behaviors regarding a worm gear ra-tio of N = 20. This result is illustrated in Figure 3.2.
-
14 Chapter 3. Design Process
Figure 3.2: Speed, current, and efficiency as a function of time for the ramp and tank robot. Theblue graph indicates flat ground curves while the red graph indicates slope curves. The parametersused are N = 20, cr = 0.1, m = 7kg, and ηd = 0.7. Note that two motors are used here, doubling thetorque spec of each motor for vehicle analysis
-
3.2 Preliminary Design 15
Based on these analysis measures, we went for the VEX Pro motors as they provided enoughtorque, and we were willing to pay the price based on the fact that it was better to have too muchpower and limit the motor output in software than to find that we did not have enough power toclimb the ramp.
3.2.3 Suspension AnalysisFor suspension, shock pistons are used for better shock attenuation and reliability. While it is trivialto design a suspension with shock pistons and a single linkage into the bottom idler wheels, oneproblem with this type of suspension is the problem of losing tension on the tracks. To counteractthis problem, a new concept of linkage-based suspension is used where the top idler wheel rotateswith the bottom idler wheel to counteract this effect of losing tension.The mechanism works asfollows: as the impact on the bottom gets absorbed by the bottom idler wheel, the linkage turnsclockwise from the central pivot. This turns the top idler wheel in the same direction, increasing theheight of the top idler wheels and counteracting the loss of tension.
This mechanism can be modeled by the left configuration of Figure 3.3.
Figure 3.3: Left: Suspension linkage modeling Right: Result of analysis of the effectiveness ofsuspension given the conditions of a = 70mm and b = 40mm.
Since the angle between the two linkages are fixed,
α +β = γ = 135◦
Then the height of the whole trajectory can be written by the equation:
h = asinα +bsinβ = asinα +bsin(γ−α)
Plotting this whole height trajectory and the individual linkage heights, we can see that as α decreases,the linkage height decreases overall. For this design, the increased height of the top linkage was notenough to counteract this effect significantly.
-
16 Chapter 3. Design Process
3.2.4 Control Scheme AnalysisWe can assume a throttle signal t ∈ [−1,1] and a steering signal s ∈ [−1,1]. The purpose is to obtaina transformation
f (t,s)→ (pL, pR)
where pL and pR are individual PWM signals to the left and right motor in a differential drive. Thefirst job is to convert signal to velocity command, which is the transformation
f1(t,s)→ (vx,ωz)
In this case we first need to define what output space we are working in, which we can define byvx ∈ [0,vmax] and ωz ∈ [0,ωmax]. While this seems like a straightforward linear transformation, thereare two factors that help in more intuitive and safer control: throttle and steering curve, and a movingaverage filter.
A linear control scheme may look beneficial because of simplicity, but it sacrifices a design spacesince the controller does not have enough control space over the whole span of velocity. Thus we candesign a throttle and steering curve that maps the space (t,s) into (vx,ωz). Since the two variablesare not coupled in any way, we can linearly separate them into two transformations: t → vx ands→ ωz. In order to implement this transfer function, we can map the throttle and steering functionsby
vx = vmaxt3 ωz = ωmaxs3
This curve, while simple, makes the curve more intuitive and is illustrated in 3.4
Figure 3.4: Steering cubic curve
Additionally, in order to implement a hard limit in acceleration, we can also apply a derivative-controlscheme by implementing a moving average filter. After initializing a filter storage of N zeros, wecan implement the average filter by
p̄(t +1) = p̄(t)+1N
(p(t +1)− p(t−N +1)
)
-
3.2 Preliminary Design 17
Next in order to transfer velocity commands vx and ωz to motor velocities ωL and ωR, it is necessaryto understand how the velocities of the wheels vL and vR will affect the system performance. We canmodel this in Figure 3.5
Figure 3.5: 2D Vehicle Dynamics
In this case we can connect vL,vR with vx,ωz by
vL = vx−Rωz vR = vx +Rωz
where R is the approximate radius of turning. After obtaining vL and vR, we can transfer these tomotor velocities by
ωL =vL
Re f fωR =
vRRe f f
where Re f f is the effective radius of turning, which is either wheel radius, or track length.
Finally, we can change the motor velocity to PWM by defining a transformation from ωL →pL ∈ [1000,2000] and ωR→ pR ∈ [1000,2000]. This can be done by a linear transformation,
pL = 1500+500ωL
ωMAXpR = 1500+500
ωRωMAX
Arranging the equations together, we get
pL = 1500+500vmaxt3−Rωmaxs3
vmax +RωmaxpR = 1500+500
vmaxt3 +Rωmaxs3
vmax +RωmaxHere the 500 could be re-arranged into a training factor V as well, such that
pL = 1500+Vvmaxt3−Rωmaxs3
vmax +RωmaxpR = 1500+V
vmaxt3 +Rωmaxs3
vmax +Rωmax
where V ∈ [0,500]. Finally, we add a factor of trim T to the signals such that the hardware differencein motor speed can be calibrated:
pL = 1500−T +Vvmaxt3−Rωmaxs3
vmax +RωmaxpR = 1500+T +V
vmaxt3 +Rωmaxs3
vmax +Rωmax
-
18 Chapter 3. Design Process
3.2.5 Vehicle Weight & COM
3.2.6 Preliminary Mechanical Design
The design processes were then made more detailed into CAD models using Solidworks. Thetransmission and suspension CAD is illustrated in Figure 3.6.
Figure 3.6: Left: Illustration of worm gear transmission. Right: Illustration of suspension mechanism.
For drivetrain of the tank a track & sprocket approach is used. The designed track assembly isshown in Figure 3.7. The tracks allow for a loose fight on the outer track and a tight fight on the innertrack, making assembly simpler while preventing the dowel pins from falling out of the assembly.The inner region of the track is designed as a roller chain with a sprocket, and the outer width of thetracks are used as train tracks for the idler wheels. The tracks, sprockets, and idler wheels are 3Dprinted for cost reduction. The final CAD of the whole vehicle is illustrated in Figure 3.8
Figure 3.7: 1. Assembly of the tracks 2. Track dimensioning 3. Sprocket with tracks 4. Idler wheelswith tracks
-
3.3 Intermediate Design 19
Figure 3.8: CAD Overview of Preliminary Design
3.3 Intermediate DesignFrom the preliminary to intermediate design, our team realized that the worm gear transmission didnot quite work and ended up switching to spur gears, along with a major redesign of the suspensionand the drivetrain.
3.3.1 Transmission AnalysisOne of the major changes to the transmission came from the fact that the modeling of tank-likevehicles is quite different from wheeled ones. Since the tractive force can be expressed in termsof torque out of transmission divided by radius of the wheels, tank vehicles are inherently moretorque-oriented due to the fact that sprockets are, in general, much smaller than wheels. This allowedus to achieve a lower gear ratio of N = 4 to N = 6, getting rid of the need for compound transmission.In order to decide between N = 4 and N = 6, we carried out an analysis using the theory in Section3.2.2 to graph the expected performances. The graph is illustrated in Figure 3.9. We realized N = 6gives us better efficiency and is more suitable for the system.
Figure 3.9: Transmission Analysis Revisited
-
20 Chapter 3. Design Process
3.3.2 Suspension AnalysisAn important modeling we did not consider before was modeling the dynamics of the suspensionalong with the kinematics. This was mainly due to the fact that the former shock pistons did nothave elastic constants provided. However, the McMaster springs had properties like number of turns,spring diameter, outer diameter and etc. There is a program online that calculates these properties tocalculate the torsion constant for the spring, which is a constant that obeys
τ = κθ
We could model the suspension by setting the initial angle. The solution this equation by MATLABis plotted in Figure 3.3.2
rF cos(θ − π3) = κ(
π2−θ)
After the modeling, we decided to use torsion springs with an outer diamter of 0.678in.
3.3.3 Shooting AnalysisTo analyze shooting better, we wanted a model that would relatively predict the shooting capabilitieswell. We made a model of our shooting mechanism divided into 3 stages: momentum transferfrom blower, energy transfer form flywheel, and finally, the projectile motion with drag and lift thatconsiders the Magnus effect.
The first stage can be modeled with the drag equation:
mdvdt
=12
CDρAv2
Since CD is round (although the nerf ball has little dimples), ρ and A are known for air and the nerfball, the only question is how to obtain v which is the incoming velocity of air. Fortunately ourblower had a ’CFM’ rating, so we can simply get this form continuity and pipe area:
Apipev =∆V∆t
=CFM
-
3.3 Intermediate Design 21
Given these calculations, the velocity of the ball after traveling 10cm was around 5m/s
The next stage has to do with energy transfer from flywheel. This stage is hard to model sincethe contact dynamics between the deformable nerfball and the flywheel requires a computationalapproach. Since we want to do a brief analysis, we made a rough assumption that 20% of flywheelenergy will be transferred to the ball in the short time span. (Perhaps less), which I defined as anefficiency factor. With this in mind we have
η2(mv2 + Iω2) = Im(ω2m1 +ω
2m2)
Since we have two different motors spinning with different RPMs (which is preferrable to gain theMagnus effect). We can quickly see that v and ω are both parameters, so we need another equationto match DOF of the system. This part gets a bit ambiguous but we can roughly assume a sketchyform of angular momentum transfer as well:
Iω = ηIm(ωm1 +ωm2)
Note that this is a wrong form of angular momentum since we’re not looking at it from a single axis,but it helps us model the system. The resulting calculation gives us around 20m/s of initial velocityafter the flywheels.
Thus we have a spinning ball with angular velocity of ω and translational velocity of v. In thiscase we can see that the ball is subject to three forces:
FD =18
ρπd2bCDvb FL =23
π2d3bωbρvB Fg = mg
This gives us the following equations:
dvxdt
=1
mb
(− 1
8ρπd2bCDvx
√v2x + v2y−
23
π2d3bωbρvy)
dvydt
=1
mb
(− 1
8ρπd2bCdvy
√v2x + v2y +
23
π2d3bωbρvx)−g
with the initial conditions of vx(0) = 20m/s and vy = 0. This is a coupled non-linear system of ODEsthat can be -at least, numerically solved. The resulting graph is illustrated in Figure 3.10The rightmost ball spun at 14rad/s, while the leftmost one spun at 0rad/s. This was an interestingresult since I’ve never modeled the spinning ball’s magnus effect before. However one interestingresult is that the range increases exponentially as angular velocity goes up - small spins do not havemuch effect over the range. However comparing a ball spinning at 14m/s with a ball that doesn’tspin, the spinning ball has 4 times the range given the same initial translational velocity! Thisconfirmed that the Magnus effect is quite important if we care about the range of the balls.
3.3.4 Intermediate Mechanical DesignUsing the results of the analysis above, we put together an intermediate mechanical design in Solid-works. Transmission is one of the things that was most focused on, since it is one of most integral
-
22 Chapter 3. Design Process
Figure 3.10: Effect of angular velocity on shooting range
Figure 3.11: Overview of transmission CAD
Figure 3.12: Overview of suspension CAD
-
3.3 Intermediate Design 23
parts of the vehicle. Our team especially focused a lot on the fastening methods for the transmission,since this proved be a quite difficult task first term. The overall fastening mechanism is illustrated inFigure 3.11. As seen from this CAD, we chose an interesting method of fastening, which is to put ahole through both the gear and the shaft, and pinning it with a coiled-spring pin. Coiled-spring pinswould be helpful since they allow room for alignment error, while press-fitting itself onto the shaft.This method would possibly provide us with a much secure way to spin the lock the axle and thegear in rotation compared to set screws.
Additionally, the new suspension mechanism based on the analysis of Section 3.3.2 is shownin Figure 3.12. The vehicle is equipped with 6 suspension mechanisms, with top idler wheels tohold the tracks in place. Major changes were made to the tracks as well since we realized our formertracks had too small of a grip area with the sprocket, and ended up bending the sprocket. For this webought the tracks from Banggood, and this track-and-sprocket mechanism is illustrated in Figure3.13. Unfortunately this track would prove hard to keep it in mesh, so we designed sidewalls to forcethe tracks in mesh. The final assembly between the transmission, suspension, drivetrain, and chassisis shown in Figure 3.14.
Figure 3.13: Overview of tracks CAD
Figure 3.14: Overview of vehicle CAD
-
24 Chapter 3. Design Process
3.3.5 Gun DesignFor the intermediate stage, we also had a good idea behind the design of the gun that was subse-quently divided into 5 main parts: firing, yaw, pitch, ammo storage & reloading, and fire-rate control.
For the yaw part, a ring gear was used as a pitch mechanism, driven by a pinion tied to a stepper.The overview of the yaw mechanism is illustrated in Figure 3.15.
Figure 3.15: Overview of vehicle yaw
We initially wanted to drive the pitch directly from the pivot point of the gun, and mount some servosto directly drive the pitch of the mechanism. However, after some testing this would become quitedifficult since the gun was around 1kg, and direct driving with a servo was almost impossible.
For the shooting mechanism and fire-rate control, we modeled the shooter after the given NERFgun to use flywheels attached to small RS-395 motors. The major challenge behind the shooterwas to tolerance the flywheels nicely enough, and to design a good chassis that will be able to holdeverything together securely. Fire-rate control happens by activating the servo that would block thepath to these flywheels.
Finally, the illustration of the ammo storage reloading mechanism is illustrated in Figure 3.17,with the yaw and shooter assembled.
3.4 Final Design
In this section we will go through our final design iteration.
3.4.1 Revised Tracks & SprocketsOne of the major changes between the intermediate design stage and the final design stage was theimplementation of a good track and sprocket system. We realized that our initial tracks and ourintermediate-stage tracks both had problems in meshing, lateral stability, and etc. Thus a lot of ourfinal design efforts were invested in designing a good track and sprocket system that will provide uswith good mobility. The new tracks and sprockets are illustrated in Figure 3.18
-
3.4 Final Design 25
Figure 3.16: Overview of shooting mechanism
Figure 3.17: Overview of intermediate gun design
Figure 3.18: Final iteration of tracks and sprockets
-
26 Chapter 3. Design Process
We can observe that the tracks are designed to grip on to the pins instead of the gap in the tracks,and because the sprockets are a lot wider, they work to delineate any asymmetric torque from thetransmission. These tracks are additionally very stiff, providing good lateral stability. Finally, insteadof putting a hole through the sprocket, we simply put a D-shaped hole to lock it in rotation with theshaft.
3.4.2 Final Vehicle DesignThe vehicle itself did not change much from the intermediate design except for the tracks. Someminor changes were made to the transmission such as using solid dowels instead of hollow ones.Some changes also came in terms of chassis design. We realized that the method using batterymounts is not robust enough to hold in the front idler wheel shafts, so we proceeded to secure thefront idler wheels by a second inner support using more sturdy material such as aluminum. Thecompleted vehicle is illustrated in Figure 3.19 with the new tracks and slight modifications to thechassis.
Figure 3.19: Final CAD of the vehicle
We also devised a method to check safety against flipping on the ramp. As seen as Figure 3.20, thevehicle’s center of mass (COM) must stay within a vertical line drawn from the axis of rotation (mostfrontside contact with ground) when climbing up the ramp. This means that for a 30◦ incline, the
-
3.4 Final Design 27
COM must line between an equilateral triangle formed, with one side being front contact to backcontact with the ground and the vehicle.
Figure 3.20: Explanation of COM bounds
According to this criteria, the COM of the final vehicle lies safely within the bounds of the safetyequilateral, as shown in Figure 3.21.
Figure 3.21: COM bounds on final vehicle
3.4.3 Final Gun DesignThe gun went through major iterations of the design during this period, including some fixes tothe yaw and pitch mechanisms. For the yaw, the gear ratio was changed to be smaller before aswe wanted to ensure a tight mesh, as well as to be able to move the turret faster. Additionally,some implementation changes were made for the bearing at the yaw. This was done by alternatingdifferently sized balls in the yaw groove, since in order to have the big balls rolling smoothly, thereneeds to be a smaller, intermediate contact that will ensure that two balls torque in the same direction.(Similar to an idler gear in between two gears that help gears retain the same direction). For the gun,some design changes were made so that the gun was feasible to assemble. We realized that havinglower pitch would be more beneficial than having a further shooting range, and the gun was thereforeturned facing the bottom to ensure more clearance to pitch. The final yaw and gun mechanisms areillustrated in Figure 3.22.
-
28 Chapter 3. Design Process
Additionally, for the final design we implemented a pitch using a 4-bar linkage instead of di-
Figure 3.22: Illustration of final yaw (Left), and final gun (Right)
rectly driving it at the pivot joint on the gun mount. This enabled us to lower the torque requirementsfor servo significantly. However, linkage mechanisms are difficult to design since one needs to dotrial-and-error on the kinematics. With the initial goal of downwards pitch 30◦ and upwards pitchof 10◦, we found a trial-and-error solution to the linkage kinematics. The mechanism at maximumdownwards pitch and maximum upwards pitch is illustrated in Figure 3.23.
Figure 3.23: Illustration of final pitch mechanism
Finally, the fire rate control and reloading are done as seen in Figure 3.24. The bowl at the topserves as ammo storage, and has an actuated lid to prevent the balls from falling out when moving.Also, servo at the neck blocks the balls from entering the main firing rail. Once dropped, the bloweraccelerates the ball and feeds it to the flywheel.
Figure 3.24: Illustration of Reloading & Fire rate control mechanism
-
3.4 Final Design 29
The final gun designed and assembled in CAD is shown in Figure 3.25
Figure 3.25: Final gun assembly
3.4.4 Electronics LayoutThe electronics were a major challenge for the team since there were multiple degrees of freedom tobe actuated, especially at the gun-level. The rough component diagram is illustrated in Figure 3.26.
Figure 3.26: High-level block diagram of electronics
Because the wiring for the whole system was quite complicated and unsecure to be solved in aprototyping breadboard, we made use of some electrical tools that can help us aid the wiring processand make it easier to debug. Some components are listed below, and shown in Figure 3.27
-
30 Chapter 3. Design Process
Figure 3.27: Components in electronics. From left to right: Wiring Router, Busbar, Terminal Blocks,Slip Ring
1. 3D-Printed Router: helped us to route the wires and ensure that some connections stay intact.2. Busbar : A high-current power distribution block3. Terminal Block: Secure way to junction different signal / power lines.4. Slip Ring: Solution to yaw wiring by enabling rotation in wire routing.
3.4.5 AutonomyThe initial plan for autonomy was to utilize vision-servoing with the following math. Given an imageof I(t) = (x,y,r,g,b)t , we want to detect O(t) = (x,y) that would detect the center of some detectedobject. (In our case, this would be the base, see-saw, etc.). Going through a blue-space intensityfilter, contrast normalization, and adaptive thresholding, we can obtain the centroid of the detectedobject in the final space by
(x̄, ȳ)O(t) =(
∑ I · x∑x
,∑ I · y∑y
)This process is illustrated in 3.28.
Figure 3.28: Image processing to detect yellow object
Then we wanted to perform PID based on the x-coordinate of this detected object. This concept isillustrated in Figure 3.29.
Figure 3.29: PID Based on detected image
As we ran out of time, we chose to do dead-reckoning instead by telling the robot to go forward for5 seconds. As we ran out of testing time for this autonomy, we had to abandon the concept.
-
4. Construction & Manufacturing
4.1 Design Iteration 1
This section describes the manufacturing and construction process done for the first iteration of ourvehicle.
4.1.1 Transmission
Since the first vehicle had a worm gear transmission, the orientation of the motor was orthogonalwith the orientation of the shaft. Since the transmission was an important component, we wentthrough the process of 3d printing the transmission mount first to check overall design tolerances,and then milling it out of a square aluminium block. This manufactured transmission is illustrated inFigure 4.1.
Figure 4.1: 1st Vehicle Transmission Manufacturing
-
32 Chapter 4. Construction & Manufacturing
4.1.2 Suspension & Drivetrain
The suspension and drivetrain were quite challenging to make. The tracks were custom 3D printed,which required many times in manufacturing in assembly with more than 100 tracks. For the firstvehicle, a lot of time was spent on the lathe as well in order to manufacture delrin spacers, putretaining ring grooves for the chassis, and etc. Figure 4.2.1 illustrates the 3D printed tracks. Figure4.2.2 describes one suspension unit, where lots of rods had to be cut and assembled using press-fitteddelrin shaft collars. Finally, Figure 4.2.3 describes the aluminum shafts with retaining grooveswhich was done on the lathe.
Figure 4.2: 1. 3D Printed tracks. 2. Single suspension unit. 3. Rods for structural support
4.1.3 Electronics
Originally, the electronics were assembled using towers with standoffs, that house different electroniccomponents within each level. The top floor housed the computer (Raspberry Pi) as it often neededto be connected to external inputs such as HDMI and USB. The electronics tower was laser-cuttedout of acrylic. The assembly process is illustrated in Figure 4.3
Figure 4.3: 1. Assembled electronics tower. 2. Acrylic plates for electronics
-
4.2 Design Iteration 2 33
4.1.4 Final VehicleThe first iteration of the final assembled vehicle is shown in Figure 4.4
Figure 4.4: First generation vehicle
4.2 Design Iteration 2
This section describes the manufacturing and construction process done for the second iteration ofour vehicle.
4.2.1 TransmissionThe challenge for the transmission manufacturing 2nd term was putting a hole through a shaft andthe gear, and meshing them together so that we could fit a pin through both units. This would proveto be quite challenging in terms of alignment and tolerances. The mill was used to carefully find theedge of the shafts, and a 1/16 inch carbide drill was used to drill a hole through the stainless steelshaft. We utilized the red hardened steel lubricant and a high RPM to successfully put a whole in theshaft on the mill. The assembled transmission is shown in Figure 4.5.
-
34 Chapter 4. Construction & Manufacturing
Figure 4.5: Transmission, manufactured and assembled
The coiled-spring pin helped a lot during the assembled process. Because of its flexibility, itleft some room for error during the assembly. This pin was later press-fitted into the gear and theshaft on a small press-fit. The inner motormount was later manufactured using the waterjet byaluminium.
4.2.2 Suspension & DrivetrainThe initial suspension mechanism was assembled using wooden legs, with a torsion spring. Bendingthe springs consistently was a major challenge in terms of manufacturing, and we quickly realizedthat wooden arms would not be strong enough to withstand impact that our vehicle was exposed to.Therefore we decided to use 100% infill PLA to manufacture these arms. Initially worried about thestrength of PLA as a plastic part, we looked for tricks to make the PLA part stronger. Figure 4.6shows that coarse prints with layer heights of ≈ 2.5mm are in fact better in terms of strength.
Figure 4.6: 3D Printer Infill vs. Layer Height
These suspension units were printed with 100% infill at the techlab, and the assembled suspension
-
4.2 Design Iteration 2 35
mechanism is illustrated in Figure 4.7.
Figure 4.7: 1. Former suspension mechanism with wood. 2. 3D Printed Suspension rocker armswith 100% infill.
4.2.3 Gun Manufacturing
Finally, the gun was manufactured by designing an interface part between the NERF gun, the blower,and the top funnel. Most of this interface was 3D printed, with some MDF parts providing cover forthe whole unit.
4.2.4 Final Assembled Vehicle
The final assembled vehicle is shown in Figure 4.8.
Figure 4.8: Final assembled vehicle, 2nd iteration
-
36 Chapter 4. Construction & Manufacturing
4.3 Design Iteration 34.3.1 Tracks & Drivetrain
A significant amount of time for the third iteration was put into improving mobility through designand manufacturing of new tracks. The newly designed tracks in Section 3.4.1 were manufacturedusing 3D printing, as is shown in Figure 4.9. The new tracks also took a long time to make sinceeach of them were printed, press-fitted using steel pins, and then a rubber was taped at bottom toincrease traction.
Figure 4.9: Assembled tracks
4.3.2 CollisionIn order to strengthen our vehicle against collision, we made the sidewalls out of water-jetted ABS.Additionally, the front part was strengthened using aluminum inner walls. This construction is shownin Figure 4.10.
Figure 4.10: Assembled tracks
-
4.3 Design Iteration 3 37
4.3.3 ElectronicsThe electronics became significantly hard tasks as time went on and our system got more complex,so we had to utilize the components in Figure 3.27 to effectively wire up the whole system. Thisconstruction is shown in Figure 4.11. In the final iteration, the wiring for the shooting system (two
Figure 4.11: Assembled electronics
busbars and relay) was moved up to the gun. This is shown in 4.12
4.3.4 Gun ManufacturingModeling the final gun design in Figure 3.25, the gun was manufactured using acrylic as a baseplateas this provided view into what was going on the bottom of the gun, which made for slightly easierassembly. The assembled and finalized yaw and pitch is shown in Figure 4.12. The terminals at theback helped tremendously with wiring. Before the terminals were there, the gun wiring was quitedifficult since we had to lift up the top plate slightly in order to debug the wires and observe whatwent wrong.
Figure 4.12: Assembled electronics
-
38 Chapter 4. Construction & Manufacturing
4.3.5 Final Vehicle AssemblyOur final competing vehicle is shown in Figure 4.13 and 4.14.
Figure 4.13: Final vehicle iteration
Figure 4.14: Three vehicles: Drogon, Viserion, and Rhaegar, without their guns
-
5. Testing
5.1 Mobility TestingMost of our tests were done on the reliability of the mobility mechanism. Figure 5.1 shows thetesting of our vehicle suspension and mobility on grass, where it is able to climb up a small bumpwith the suspension.
Figure 5.1: Suspension Mechanism Testing
Additionally, many mobility tests were considered on the see-saw and the ramp, where we checkedfor clearance. Figure 5.2 shows an example of such test, where the vehicle’s ability to climb up thesee-saw and clearance is put to test.
5.2 Collision TestingMany of our tests were also focused on designing a sturdy chassis. Over time we realized that sinceit could be sometimes difficult to control our vehicle, it could collide with a wall and compromise itsmobility. For instance, Figure 5.3 shows the front part of the MDF sidewall breaking upon collisionwith a wall. This is not easy to fix since the whole sidewall has to be replaced.Therefore we ran some collision tests with different designs, which subsequently went throughdifferent iterations to strengthen collision. The second iteration tried to counteract the moment
-
40 Chapter 5. Testing
Figure 5.2: Slope clearance & Traction Testing
Figure 5.3: Collision Testing
-
5.3 Gun Testing 41
caused by collision by an inner battery mount (Figure 5.3.2), but this proved unreliable as well sincePLA was too weak to provide reliable protection. The final solution gripped on to the inner shaft byaluminium, which provided a sturdy mechanism against collision.
5.3 Gun TestingFinally, a lot of our testing efforts were focused on testing the shooting system. Since the shootingsystem was quite complex, it required a lot of time to setup and test. Once working, however,we realized that shooting would help tremendously in close corridors such as the ramp. Figure5.4 shows time-lapse screenshot of our vehicle’s yaw working, where it is able to aim towards astationary vehicle.
Figure 5.4: Yaw Mechanism Testing
In order to practice aiming at the actual competition, we also placed a laser pointer on our gun thatwould show where the gun was aiming at. This is shown in Figure 5.5.
Figure 5.5: Laser to test power in shooting
-
6. Initial Performance
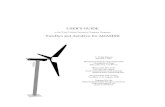
6.1 Mobility DemoThe mobility demo was quite useful because it consisted of different terrains and runs that we couldtest our vehicle’s mobility on. The mobility course is illustrated in Figure 6.1.
Figure 6.1: Map of the mobility demo
The mobility demo is consisted of following sections:1. Ramp2. Seesaw3. Figure 84. Rumble Strip5. Turn6. Sprint
At the first mobility demo, our performance is listed in Table 6.1. Our ramp and rumble strip runs
Table 6.1: Mobility Demo PerformanceCourses Ramp See-saw Figure 8 Rumble Strip Turn SprintTime (s) 20 27 38 17.5
showed that we had sufficiently good transmission and suspension to climb up the run, but we
-
6.2 Scoring/Handling Demo I 43
couldn’t make up the seesaw or the tight turn due to major problems in our drivetrain and the wormgear transmission. Particularly, the worm gear transmission did not quite work well for turning. Weconcluded that this was due to three reasons:
1. Bent shaft and tolerances ruining the worm-pinion mesh, grinding down the gear2. Worm gears not originally meant to take varying dynamic loads3. Small width of sprocket putting lot more load on transmission
After the first demo, we ended up switching from worm drive to spur gear transmission.
6.2 Scoring/Handling Demo I
The 2nd iteration vehicle shown in Figure 4.8 was tested in the second scoring/handling demo, withthe same setup shown in Figure 6.1. Unfortunately our team wasn’t able to make it through most ofthe first demo except for shooting, because the sprocket of the vehicle failed to mesh properly withthe tracks. However, the shooting went well as we had the best gun out of all the teams that wasmost powerful, ranging across the whole battlefield. The problems and issues we’ve addressed in thescoring/handling demo are shown below:
1. Transmission pin broke, and we need a better method to fasten the transmission2. Tracks did not properly mesh with sprockets3. Collision broke the front part of the chassis
6.3 Scoring/Handling Demo II
In the 2nd Scoring and Handling Demo, we were able to test our final track designs which workedquite well across all the runs for both robots. The score breakdown is illustrated in Table 6.2.
Table 6.2: S/H Demo 2 PerformanceCourses Ramp See-saw Figure 8 Rumble Strip Turn SprintTime (s) 20 27 38 17.5
Although we were quite happy with the result of the mock competition, we ran into new problemsthat subsequently needed to be addressed.
1. Trouble with going over the rumble strip, as a result of clearance & bad control scheme2. Troubleshooting electronics for a while - need better wiring3. Front collision not entirely solved by PLA battery mount solution4. Shooting is quite difficult - need better pitch and yaw
6.4 Mock Competition
At the mock competition, we ran 3 matches against competing teams of Riveters, Floyd, andGuardians of Spalding. The score breakdown is shown in Table 6.3. We immediately saw thatelectrical needs improvement upon, since most of our time in the mock competition was spent ondebugging electrical issues with our vehicles. Additionally, we learned a lot more about the strategyas well. In our match against the floyd, both teams did not have guns. In this case we realizedthat mobility decides the battle, and that in most cases, skid-steer has better mobility compared toAckermann vehicles. One strategy learned was to face the robot sideways and to block any robotcoming up the ramp. The match against the Guardians confirmed this trend: on the ground, we had
-
44 Chapter 6. Initial Performance
Table 6.3: Mock Competition PerformanceTeam Ramp Seesaw Base Score Team Ramp Seesaw Base ScoreROF 63 52 13 194.75 Riveters 133 148 180 616.25ROF 48 77 149 338.875 Guardians 180 20 0 342.5ROF 181 132 52 550.25 Floyd 0 38 101 153.25
a good working gun and obliterated the other robot whenever they tried to come close. However,our ramp vehicle did not have a gun at the moment and kept getting fired upon. Since the rampwas a more weighted spot, we ended up losing by a close margin. The match against Riveters wasunfortunately lost as one of our robots stopped working. The lessons of the mock competition wereas follows:
1. Multiple issues with electronics that are very difficult to debug, especially within shooting2. Need for better wire management and debugging strategies3. Realized the importance of shooting, especially in close corridors4. Very difficult to aim in long-range when robots are moving
-
7. Final Performance
7.1 Results of the CompetitionWe lost from DAS Roboboz in the quarter-finals, and ended up winning 2 of the 5 round-robinmatches. The result of our final performance is illustrated in Table 7.1.
Table 7.1: Final Competition PerformanceTeams Guardians Floyd Das Roboboz Toast Riveters Quarter-Finals (DR)
Score(Opponent) 532.875 512.5 331.125 196.5 689.125 725.0Score(ROF) 151.375 197.25 460.0 444.625 98.625 35.875
Result Loss Loss Win Win Loss Loss
The result of the competition was not as good as we hoped it to be, but there were countless lessonsto be learned from the final competition.
7.2 Broken Parts and Fixes7.2.1 Transmission
One of the most critical failures in our system was the transmission. Two of our vehicles had abroken pin as a result of long-runs throughout the competition, which needed to be quickly replaced.Unfortunately one of the pins was very difficult to replace, and we had to struggle with them in orderto replace the broken hollow pins with solid pins in the middle of the competition. However wefortunately managed to do it within given time.
7.2.2 ControlWe haven’t quite spent enough time refining the control scheme, which resulted in a quite big disaster- one of our vehicles fell off the ramp and collided with the ground. We were proud, however, thatthe shaft gave in before the the sidewalls broke. This means that the fix and tests against collisionswere quite successful.
-
46 Chapter 7. Final Performance
7.2.3 ElectricalMost of our problems were caused by electronics. For examples, the ESC failed to calibrate, andshooting systems often went haywire due to faulty electrical components and signals, interference,shorting, etc. The grey vehicle, for instance, was running fine for the first two runs. However,after attempting to fix the electronics, one of the signal wires shorted and the vehicle mobilitywent haywire. After that we had to abandon the shooting systems because we couldn’t debug theelectronics well enough in time.
7.2.4 TracksAs the track pins were subject to long-runs and fatigue, the pins slipped out, inducing a bendingmoment on one side of the tracks. As a result, the tracks were thrown out as illustrated in Figure 7.1.
Figure 7.1: 1. Abandoned Gun due to electrical issues. 2.Example of track failure
7.3 Important Lessons LearnedFrom the final competition, we learned that complexity really caught up to us in the process. Ourteam has good design and manufacturing skills, but did not realize the fact complex designs needenough testing and trial-and-error to nail them correctly. In this aspect we likely overestimated ourabilities and time due to lack of experience. Some technical issues that we learned are
1. Spending time to simplify and clean up wiring within the robot makes debugging much easierwhen things go wrong. This extends past simply making sure that wires are properly routedand colour coded, but also means that it is essential to consider whether cheaper electroniccomponents are worth the investment if they result in a more complicated wiring scenario. Inparticular, we had issues with our decision to utilise ESCs instead of the shop provided motorcontroller, since they required their own PWM board to function effectively. In addition tothis, the sheer number of actuators that our shooting mechanism required served to turn thegun into a crow’s nest of wiring that made it impossible to localise shorts and faults. It waslikely a fault in the gun’s wiring that led to our shooting proving to be ineffective in the finalcompetition.
2. Track pins tend to slip out due to fatigue, which was a known problemm at the time of thefinal competition. However, deciding to simply monitor the problem rather than implementing
-
7.3 Important Lessons Learned 47
a mechanical fix proved to be a poor decision. By adding sidewalls to our vehicles - as wedid in an earlier design - the tracks would have been better protected from collisions whilethe pins would have been better constrained. A larger lesson from this failure is to never passup an opportunity to fix an observed problem, since the unknown issues will already be morethan enough to handle during the final competition.
3. After our experience from first term, we were wary of testing our robots too hard lest theybecame damaged. However, we learned from the final competition that it is imperative to testthe robots to failure in order to identify all the possible faults that could occur out in the field.The mantra of testing extends to our failed implementation of autonomy, which we optednot to operate in the final competition entirely due to a lack of testing time. In addition tothis, while we performed extensive tests on the mobility and shooting as separate systems, weshould have made time in our schedules to allow for ample testing of them together rather thanleave it to the last minute.
4. During each redesign of our vehicles, we came to observe a short-term decrease in functionalityand reliability immediately after improvements were made. This was a consequence ofunforseen bugs and issues arising in any new design, even when it is only an iterative stepon a prior implementation. Knowing this, we should have frozen the design of the robotsat least a few days prior to the competition rather than insist on seeking to continue tomake improvements. Continued attempts to improve the robots ended up hampering ourreliability and ultimately doomed the shooting mechanism due to added and relatively untestedcomplexity.
-
8. Budget
The table of budget is listed below:
Part Vendor Date Each Quan. SubtotalWorm Gear, Module 0.5 KHK Gears 2017/10/29 9.39 2 18.78Worm Wheels, Module 0.5 KHK Gears 2017/10/29 12.98 2 25.96RS-775 Motors Vex-Pro 2017/10/29 17.99 6 107.943/8 Aluminum Rod Online Metal 2017/10/29 6.08 1 6.08ABS Sheet OnlineMetal 2017/10/29 25.70 3 77.104mm Steel Shaft ServoCity 2017/10/29 0.99 2 1.985mm Steel Shaft ServoCity 2017/10/29 2.49 6 14.94MR115 bearing Amazon 2017/10/29 6.88 1 6.88Raspberry Pi 3 Amazon 2017/10/29 34.99 1 34.99Cage Blower Sparkfun 2017/10/29 4.95 4 19.85mm Retaining Ring McMaster 2017/10/29 5.00 1 5.004mm Retaining Ring McMaster 2017/10/29 4.00 1 4.00M3 Threaded Rod McMaster 2017/10/29 5.61 1 5.611/8" Dowel Pin McMaster 2017/10/29 12.56 1 12.56M3 Nuts McMaster 2017/10/29 2.12 1 2.123/8 Retaining Ring McMaster 2017/10/29 8.74 1 8.74M3 Locknuts McMaster 2017/10/29 3.36 1 3.36M3 Screws McMaster 2017/10/29 5.77 1 5.77M4 Set Screws McMaster 2017/10/31 7.51 1 7.51Dual Brushed ESC QuicRun 2017/10/31 32.99 6 197.644 Channel 12V Relay Robotshop 2017/11/02 6.88 2 13.76Potentiometer Kit Robotshop 2017/11/02 4.00 1 4.00Pi Prototyping Board Adafruit 2017/11/02 4.50 1 4.50GPIO Ribbon Cable Adafruit 2017/11/02 2.95 1 2.959DOF IMU BNO055 Adafruit 2017/11/02 34.95 1 34.95
-
49
Part Vendor Date Each Quan. SubtotalLychee 1080p Webcam Amazon 2017/11/02 25.99 1 25.99UXCell M4 Standoffs Amazon 2017/11/02 6.99 1 6.99PCA9685 PWM Board Amazon 2017/11/27 11.99 3 33.97Steel Set Screw McMaster 2017/11/28 4.22 1 4.22Coiled Spring Pins McMaster 2018/01/07 12.77 1 12.77M5x45 Flat Head Screw McMaster 2018/01/07 8.83 1 8.83M5x60 Flat Head Screw McMaster 2018/01/07 16.08 1 16.08M5 Nuts McMaster 2018/01/07 2.69 2 5.38Music Wire Torsion Spring McMaster 2018/01/07 7.82 2 15.64M5x12 Socket Screw McMaster 2018/01/07 11.31 1 11.31M4x25 Socket Screw McMaster 2018/01/07 7.19 3 21.57M5 Locknuts McMaster 2018/01/07 12.56 1 12.56M5 Threaded Rod McMaster 2018/01/07 4.09 9 44.10Wii U Controller Amazon 2018/01/07 18.99 3 56.97Wii U Receiver Amazon 2018/01/07 19.99 3 59.9710pc MR115 Bearing Banggood 2018/01/15 2.08 10 20.810pc MR115 Bearing Banggood 2018/01/15 3.20 10 32.0SG90 Micro Servo Banggood 2018/01/15 6.85 2 13.7Nylon Tank Tracks Bangood 2018/01/15 12.53 3 37.591/8 Steel Balls McMaster 2018/01/15 5.70 1 5.70Stepper Motor Controller Amazon 2018/01/18 6.98 3 17.94NEMA17 Stepper Motor Amazon 2018/01/18 11.99 3 32.97Banebots RS-395 Robotshop 2018/01/22 5.25 4 211/4 Steel Balls McMaster 2018/01/24 3.42 1 3.424 Channel 5V Relay Robotshop 2018/02/05 6.88 3 20.64Power Busbar Robotshop 2018/02/06 1.95 10 19.5M3x50 Pins Huyett 2018/02/06 0.0629 300 18.87Music Wire Torsion Spring McMaster 2018/02/06 5.19 4 20.76M5x60 Flat Head Screw McMaster 2018/02/11 16.36 1 16.36M5 Locknuts McMaster 2018/02/11 4.41 1 4.41Clamp Shaft Collar McMaster 2018/02/11 2.06 8 16.84Set Screw Shaft Collar McMaster 2018/02/11 1.07 8 8.56Terminal Block Amazon 2018/02/12 8.70 1 8.70Clear Cast Acrylic OnlineMetal 2018/02/18 56.63 1 56.63Arduino Uno R3 Amazon 2018/02/19 11.99 2 23.98USB Host Shield Amazon 2018/02/19 19.99 2 39.98M3x50 Pins Huyett 2018/02/19 0.1265 150 18.98MG996R Servo Amazon 2018/02/25 27.99 2 55.98DROK Regulator Amazon 2018/02/26 9.51 3 28.53Slip Ring Amazon 2018/02/26 11.99 2 21.98Shop MDF Shop 3.00 7 21.00Shop Gears Shop 1.00 6 6.00Pinion Gears Tower Hobbies 2018/01/09 5.99 6 35.94Motor Controller Reimburse -300.00Total 1294.56
Introduction & BackgroundME72 Tank Wars: IntroductionGame Rules & ObjectivesCourse LayoutGame Rules
Vehicles & StrategyStrategy OverviewGame StrategyOffensive StrategyDefensive Strategy
VehiclesInitial Vehicle Strategy: 5 Base PlanFinal Vehicle Strategy: 3 Base Plan
Design ProcessDesign StrategyPreliminary DesignGeneral IdeasTransmission AnalysisSuspension AnalysisControl Scheme AnalysisVehicle Weight & COMPreliminary Mechanical Design
Intermediate DesignTransmission AnalysisSuspension AnalysisShooting AnalysisIntermediate Mechanical DesignGun Design
Final DesignRevised Tracks & SprocketsFinal Vehicle DesignFinal Gun DesignElectronics LayoutAutonomy
Construction & ManufacturingDesign Iteration 1TransmissionSuspension & DrivetrainElectronicsFinal Vehicle
Design Iteration 2TransmissionSuspension & DrivetrainGun ManufacturingFinal Assembled Vehicle
Design Iteration 3Tracks & DrivetrainCollisionElectronicsGun ManufacturingFinal Vehicle Assembly
TestingMobility TestingCollision TestingGun Testing
Initial PerformanceMobility DemoScoring/Handling Demo IScoring/Handling Demo IIMock Competition
Final PerformanceResults of the CompetitionBroken Parts and FixesTransmissionControlElectricalTracks
Important Lessons Learned
Budget