Rig Rotor

of 41
-
Upload
jorge-ortega -
Category
Documents
-
view
219 -
download
0
Transcript of Rig Rotor
-
8/13/2019 Rig Rotor
1/41
The rigid rotor in classicaland quantum mechanics
paul e.s. wormer
Institute of Theoretical Chemistry, University of Nijmegen,Toernooiveld, 6525 ED Nijmegen, The Netherlands
Contents1 Introduction 1
2 The mathematics of rotations in R 3 2
3 The algebra of real antisymmetric matrices 8
4 The kinematics of a rigid body 11
5 Kinetic energy of a rigid rotor 14
6 The Euler equations 20
7 Quantization 21
8 Rigid rotor functions 23
9 The quantized energy levels of rigid rotors 29
10 Angular momenta and Lie derivatives 3410.1 Innitesimal rotations of functions f (r ) . . . . . . . . . . . . 3510.2 Innitesimal rotations of functions of Euler angles . . . . . . . 37
1 IntroductionThe following text contains notes on the classical and quantum mechanicalrigid rotor. The classical part is based on the books of H. Goldstein Classical Mechanics [Addison-Wesley, Reading, MA, 1980, 2nd Ed.] and V. I. Arnold,Mathematical Methods of Classical Mechanics, [Springer-Verlag, New York,1989, 2nd Ed.]. In the following pages Goldsteins exposition is condensed,whereas Arnolds terse mathematical treatment is expanded. The quantummechanical part is in the spirit of L. C. Biedenharn and J. D. Louck Angular Momentum in Quantum Physics: Theory and Application . [Addison-Wesley,Reading, MA 1981].
1
-
8/13/2019 Rig Rotor
2/41
2 The mathematics of rotations in R 3
Consider a real 3 3 matrix R with columns r 1, r 2, r 3, i.e., R = ( r 1, r 2, r 3).The matrix R is orthogonal if
r i r j = ij , i, j = 1, 2, 3.The matrix R is a proper rotation matrix, if it is orthogonal and if r 1, r 2 andr 3 form a right-handed set, i.e.,
r i r j =3
k=1
ijk r k . (1)
Here ijk is the antisymmetric (Levi-Civita) tensor ,
123 = 312 = 231 = 1 (2)213 = 321 = 132 = 1
and ijk = 0 if two or more indices are equal.The matrix R is an improper rotation matrix if its column vectors form
a left-handed set, i.e.,r i r j =
k
ijk r k . (3)
Equations (1) and (3) can be condensed into one equation
r i r j = det( R )3
k=1
ijk r k (4)
by virtue of the following lemma.
Lemma 1.
The determinant of a proper rotation matrix is 1 and of an improper rotation
1.Proof
The determinant of a 3 3 matrix ( a , b, c) can be written as a (b c).Now, for a proper rotation, we nd by Eq. (1) and remembering that the r kare orthonormal,
r 1 (r 2 r 3) =k
23k r 1 r k = 231 = 1,
and likewise we nd 1 for an improper rotation by Eq. (3).
2
-
8/13/2019 Rig Rotor
3/41
The Levi-Civita tensor allows the following compact notation for the vec-tor product
(a b)i = j,k
ijk a j bk .
For instance, ( a b)2 = 213 a1b3 + 231 a3b1 = a1b3 + a3b1.Theorem 1A proper rotation matrix R = ( r 1, r 2, r 3) can be factorized thus
R = R z(3) R y(2) R x (1) (the xyz -parametrization)
or also
R = R z() R y( ) R z ( ) (the Euler parametrization)
where
R z () :=cos sin 0sin cos 0
0 0 1
R y() :=cos 0 sin
0 1 0
sin 0 cos (5)
R x() :=
1 0 00 cos
sin
0 sin cos.
Proof We rst prove the xyz -parametrization by describing an algorithm for thefactorization of R . Consider to that end
R z (3) R y(2) =cos 3 cos2 sin 3 cos3 sin 2sin 3 cos2 cos3 sin 3 sin 2
sin 2 0 cos2 =: ( a 1, a 2, a 3).
(6)
Note that the multiplication by R x (1) on the right does not affect the rstcolumn, so that r 1 = a 1. Solve 2 and 3 from the rst column of R ,
r 1 =cos 3 cos2sin 3 cos2
sin 2.
This is possible. First solve 2 for / 2 2 / 2 fromsin 2 = R31 (r 1)3.
3
-
8/13/2019 Rig Rotor
4/41
Then solve 3 for 03 2 fromcos 3 =
R11cos 2
sin 3 = R21cos 2.
This determines the vectors a 2 and a 3.
Since a 1, a 2 and a 3 are the columns of a proper rotation matrix [Eq. (6)]they form an orthonormal right-handed system. The plane spanned by a 2and a 3 is orthogonal to a 1 r 1 and hence contains r 2 and r 3. Thus,
(r 2, r 3) = ( a 2, a 3)cos 1 sin 1sin 1 cos1 . (7)
Since r 2, a 2 and a 3 are known unit vectors we can compute
a 2 r 2 = cos 1 (8)a 3 r 2 = sin 1.
These equations give 1 with 0 1 2. Augment the matrix in Eq. (7)to R x(1), then
R (r 1, r 2, r 3) = ( r 1, a 2, a 3)R x (1)= ( a 1, a 2, a 3)R x (1) = R z(3) R y(2) R x(1).
This concludes the proof of the xyz parametrization.The Euler parametrization is obtained by solving 2 and 3 from r 3 = a 3and then considering
(r 1, r 2) = ( a 1, a 2)cos 1 sin 1sin 1 cos1 (9)
or,a 1 r 1 = cos 1 , a 2 r 1 = sin 1.
Equation (9) can be written as(r 1, r 2, r 3) = ( a 1, a 2, r 3) R z(1) = R z(3) R y(2) R z(1) ,
which proves the Euler parametrization.
Note.Some confusion exists about the Euler angles of an improper orthogonal ma-trix S . One can write S = S R , where R is proper and has a uniqueEuler parametrization and S is another improper rotation matrix. Different
4
-
8/13/2019 Rig Rotor
5/41
choices of S are possible. Some workers choose S = 1 (space inversion),while others choose a reection, for instance in the xy plane:
S
=
1 0 0
0 1 00 0 1
.
Since the choice of S is usually implicit and clouded by physical arguments,it is not always clear that the choice is only a matter of convention. Inany case, one needs an extra convention, added to the Euler convention, touniquely parametrize an improper rotation matrix.
Yet another parameterization of proper rotation matrices, the ( n ,) pa-rameterization, is useful. In order to introduce it, we rst prove the existenceof a rotation (invariant) axis.
Theorem 2 (Eulers theorem)
A rotation matrix R has at least one invariant vector n , i.e., R n = n . If R has more than one invariant vector, R = 1 (the unit matrix) and any vectoris an invariant vector.
Proof We show that the matrix R has an eigenvalue = 1. Since det( R ) 1 =det( R 1) = 1, we nd, using the rules det( A T ) = det( A ) and det( A B ) =det( A ) det( B ),
det( R 1) = det (R 1)T = det( R T 1) = det( R 1 1)= det R 1(R 1) = det( 1) det( R 1) det( R 1)= det( R 1).
Hence, det ( R 1) = det( R 1) so that det ( R 1) = 0, and we con-clude that the secular equation det ( R 1) = 0 has the root = 1. Thecorresponding eigenvector is n .
From linear algebra we know the general result that an m m matrix Ahas m orthogonal eigenvectors if and only if it is normal, that is, if AA =
A A . That is, a normal matrix is unitarily equivalent to a diagonal matrix.Its eigenvectors and eigenvalues may be complex. In the case at hand R ,which obviously is normal, is equivalent to a matrix of the form
ei 0 00 e i 00 0 1
,
because, as we just saw, it has at least one eigenvalue 1. Further the diagonalmatrix is unitary since R is orthogonal. The diagonal elements of a diagonal
5
-
8/13/2019 Rig Rotor
6/41
unitary matrix lie on the unit circle in the complex plane. Finally det( R ) = 1(is the product of the diagonal elements), so that the two complex eigenvaluesare each others complex conjugate. The two corresponding eigenvectors are
in general complex. The matrix R
has only two real eigenvectors, other thann , if = or = 0. For = the eigenvectors change sign and are notinvariant. For = 0 we have the unit matrix. This proves Theorem 2.
Often one writes a proper rotation matrix as R (n ,), where the invariantvector n is the rotation axis and is the angle of rotation around n . It is notdifficult to give an explicit expression for R (n ,). Consider to that end anarbitrary vector r = an in R 3, (a
R ), and decompose it into a componentparallel to the invariant unit vector n and a component x perpendicular toit:
r = ( r n ) n + x with x = r (r n ) n . (10)The vectors r , x and n are in one plane, while y n r is perpendicularto this plane. The vectors n , x and y form a right-handed frame. Thevector n has unit length by denition and the vectors x and y bothhave the length |r |2 (n r )2 (which is not necessarily unity). When werotate r around n its component along n is unaffected and its perpendicularcomponent transforms as
x cosx + sin y. (11)Hence,
R (n ,)r = cos r (r n ) n + sin n r + ( r n ) n . (12)It is easily veried that for n (n1, n 2, n 3)
n r =0 n3 n2n3 0 n1
n2 n1 0r =: N r . (13)
The dyadic product n
n is a matrix with i, j element equal to ni n j . Evi-
dently,(r n ) n = n n r . (14)
By direct calculation one shows that
N 2 = n n 1. (15)By substituting (13), (14) and (15) into (12) we obtain nally
R (n ,)r = 1 + sin N + (1 cos)N 2 r . (16)
6
-
8/13/2019 Rig Rotor
7/41
Since r is arbitrary, we have
R (n ,) = 1 + sin N + (1 cos)N 2. (17)
Since every rotation matrix = 1 has one, and only one, invariant vector,it follows that A R A T (with orthogonal A and R ) has the invariant vectorA n . Indeed,
A n = A R n = A R A T (A n ).
Since furthermore Tr( R ) = Tr( A R A T ) = 2 cos + 1, the rotation angles of R and A R A T are equal and we nd the useful expression,
A R n , A T = R An , . (18)
This expression enables us to cast the Euler parametrization into a differentform. Switching back and forth between the notation R z() R (e z ,) andsimilarly R y() R (e y , ), we nd
R z () R y( ) R z( ) = R z () R y( ) R (e z , ) R z() R y( )T
R z() R (e y, ) R z ()T (19)
R (e z , )= R (e z , ) R (e
y , ) R (e z , ).
The right-hand side gives the usual denition of the Euler angles. Consider abody with an orthonormal frame ( e x , e y , e z) attached to it and perform thethe three consecutive rotations:
1. Rotate the body around its z -axis over an angle , this sends ey toe y R z()e y .
2. Rotate the body around the new y-axis, e y , over an angle . This sendse z to e z R y( ) e z , where R y ( ) R (e y, ).
3. Rotate the body nally around the new z -axis, e z, over an angle .
ThusR z() R y( ) R z( ) = R z ( ) R y( ) R z(). (20)
The left-hand side is useful if one wants to compute the rotation matrixin the Euler parametrization, while the right-hand side corresponds to thegeometric denition of the Euler angles.
7
-
8/13/2019 Rig Rotor
8/41
3 The algebra of real antisymmetric matricesThe condition on the real 3 3 matrix A
A T = Ahas the consequence that A is of the form
0 a3 a2a3 0 a1a2 a1 0
.
(The numbering and signs appearing in this matrix will become clear later.)At this point we only note that the three real numbers a1, a2 and a3 specifythe real antisymmetric matrix A uniquely. In other words, there is a one-to-one correspondence between vectors and antisymmetric 3 3 matrices,
a =a1a2a3
A . (21)
The set of antisymmetric matrices is a vector space (linear combinations arealso antisymmetric and note that the zero matrix is both symmetric andantisymmetric). Its dimension is 3 and a basis is
L 1 =0 0 00 0 10 1 0
, L 2 =0 0 10 0 0
1 0 0 , L 3 =
0
1 0
1 0 00 0 0
(22)
(L 1)ij = 1ij , (L 2)ij = 2ij , (L 3)ij = 3ij . (23)The linear independence follows easily,
a1 L 1 + a2 L 2 + a3 L 3 =0 a3 a2a3 0 a1
a2 a1 0 =
0 0 00 0 0
0 0 0a1 = a2 = a3 = 0.
The fact [Eq. (23)] that matrix elements of L k can be written by means of the Levi-Civita tensor follows by inspection.
The space is also an algebra with the commutator as the product. LetA T = A , B T = B then it follows that A , B
T = A , B , and we seethat the space is closed under this product. This algebra is a Lie algebra,commonly denoted by so(3). The reason for the designation so(3) is thefollowing: The set of all proper rotation matrices forms a group: SO(3) (the
8
-
8/13/2019 Rig Rotor
9/41
special orthogonal group in 3 dimensions). Differentiate R z(), R y() andR z () [see Eq. (5)],
dd R x () =0 0 00 sin cos0 cos sin
=0 0 00 0 10 1 0
R x ()
= R x ()0 0 00 0 10 1 0
(24)
= L 1 R x () = R x() L 1 .
Likewise,
dd
R y() = L 2 R y() = R y() L 2 (25)
dd
R z() = L 3 R z() = R z () L 3. (26)
Differentiation at = 0 brings us from SO(3) to so(3), a linear space tangentto SO(3) and spanned by the L i .
The matrices L i generate innitesimal rotations. Consider, for in-stance, for innitesimal , [ >> ( )2],
R z(0 + ) = R z(0) + dR zd
0
(two term Taylor) (27)
= R z(0) 1 + L z
and it follows that ( 1+ L z ) represents an innitesimal rotation of a vectorin R 3 around the z -axis.
We have seen that there is a 1 1 correspondence between R 3
and so(3).To a certain extent this correspondence holds also for orthogonal transfor-mations on both spaces, as is shown in the following theorem.
Theorem 3
Consider a proper or improper rotation matrix B and let
A =3
i=1
a i L i , ai real. (28)
9
-
8/13/2019 Rig Rotor
10/41
Then
B A B T = B3
i=1
(Ba )i L i , B := det ( B ) . (29)
In other words, if A a then B A B T B Ba ; except for the presenceof B , a rotates as a vector.Proof
Write B = ( b1, b2, b3) and recall from Eq. (4) that
ba bb = Bc
abc bc,
where B = 1 gives the handedness of the set ( b1, b2, b3). Consider rstB T L i B ab =
k,lB T ak (L i)kl Blb
= k,l
Bka ikl Blb [by Eq. (23)]
= k,l
ikl (ba )k (bb)l
= (ba bb)i = B c abc (bc)i= B
c
(L c)ab Bic ,
so thatB T L i B = B c B ic L c .
This is true for any orthogonal B . Substitute B B T = B 1 then,
BL iB T = B3
c=1
L cBci . (30)
Since this equation holds for the basis of so(3) it holds for any element of this space.
Computations are often facilitated by the results in the following lemma.
Lemma 2.
If
a =a1a2a3
A =0 a3 a2a3 0 a1
a2 a1 010
-
8/13/2019 Rig Rotor
11/41
and
b =b1b2b3
B =0 b3 b2b3 0 b1
b2 b1 0
thena b = A b = B a . (31)
Proof By Eq. (23),
(a b)i =k,l
ikl ak bl =k,l
ak(L k)il bl =l
(A )il bl
= ( A b )i
= k,l bl (L l)ik ak = k B ik ak = (B a )i .The proof of the well-known fact that a b transforms as a pseudovector
now follows as an easy corollary of lemma 2. Let C be orthogonal withdeterminant C . Then
C (a b) = C A b = C A C T C b (32)= A b = C a b = C (C a ) (C b ),
since by Theorem 3 A
C A C T
corresponds with C C a C a
, i.e.,a = C a , and similarly b = C b . If C = 1 then simultaneous rotation of a and b gives rotation of a b by C . If C is improper a b is rotated butnot inverted.
Note This is an example of a general result: an antisymmetric tensor of rankn 1 transforms contragrediently (times determinant) to a vector under theunitary group U (n).
4 The kinematics of a rigid bodyConsider a system of n point masses mk , k = 1, . . . , n , moving in three-dimensional Euclidean point space (affine space with inner product in coordi-nate space R 3). At time t the masses are at the points P 1(t), P 2(t), . . . , P n (t).Choose a xed orthonormal right-handed (laboratory) frame with origin atthe point O,
e O := ( e1, e2, e3).
11
-
8/13/2019 Rig Rotor
12/41
Thus, the vector pointing from O to the point mass P k is represented by pk(t): OP k(t) = e O pk(t) , k = 1, . . . , n . (33)Clearly, the geometric quantity OP k(t) is independent of the orientation of the frame at O. The center of mass C (t) of the system is given by
OC (t) := 1M
n
k=1
mk OP k(t) with M :=n
k=1
mk . (34)
The vector OC (t) is represented by c(t), OC (t) = e O c(t). The vector OP k(t)can be decomposed as,
OP k(t) = OC (t) + C (t)P k(t) . (35)If the inner products
CP k(t) CP l(t) kl , k, l, = 1 , . . . , n (36)are time independent: dkl /dt = 0 for all k and l, the system is a rigid body .
In the case of 3-dimensional rigid bodies we can attach to the system aframe f C with origin in the center of mass. This frame moves with the rigidbody, or in other words, all particles are represented by time-independent coordinate vectors with respect to this body-xed frame. The position of the center of mass in Euclidean point space is xed by three real parameters
and the orientation of the frame requires another three parameters. (Thesecould for instance be the Euler angles describing the rotation of the framee C which is parallel to the space-xed frameto the body-xed frame f C ).In the case of planar (two-dimensional) rigid bodies we can only attach twoorthogonal unit vectors to the body, say f x and f y , a third unit vector can beconstructed by taking the vector product between these vectors. In the caseof linear (one-dimensional) systems only one vector can be attached to thesystem. The two polar angles of the vector with respect to the space-xedframe gives the orientation of the body in space.
Let us consider a 3-dimensional system. It is not difficult to dene anorthonormal frame f C (t) [for instance by diagonalization of the inertia tensor,see Eq. (58) below] and we obtain
f C (t) = e C F (t). (37)Here e C is the frame obtained by parallel translation of the lab frame e Oalong OC . Since both e C and f C (t) are orthogonal we have
F (t) F (t)T = 1 . (38)
12
-
8/13/2019 Rig Rotor
13/41
Assuming that f C (t) is right-handed, just as e C , it follows that F (t) is aproper rotation matrix. As we have seen in Theorem 1, F (t) is uniquelydetermined by three angles, for instance the Euler angles (t), (t) and (t).
The coordinates of any point P k(t) of the rigid body with respect to f C (t)are time-independent. We assume that at t = 0 the space-xed and body-xed frame coincide, i.e., F (0) = 1. Introducing the coordinates r k(0) of thepoint masses at t = 0, we write
CP k(t) = f C (t) r k(0) = e C F (t) r k(0) = e C r k(t), (39)so that the relation between space-xed [ r k(t)] and body-xed [r k(0)] coor-dinates is,
r k(t) = F (t) r k(0) , k = 1, . . . , n . (40)
Returning to the space-xed frame at O and dening the point P k so that OP kis parallel to CP k and using that in Euclidean space these parallel vectorsare represented with respect to parallel frames by the same column vector,i.e.,
OP k := e O r k(t) (41)we nd,
OP k = OC + CP k = OC + OP k= e O c (t) + r k (t) (42)
O
C
P k
P k
or, cf. Eq. (33),
pk(t) = c(t) + r k(t) = c(t) + F (t) r k(0). (43)
Since the vectors r k(0) are xed (they determine the shape of the rigid body)the motion of all particles constituting the rigid body is known, when we knowthe motion of the center of mass c(t) and the rotation F (t) as a function of time. We shall concentrate on F (t) and assume that C is at rest and coincideswith O. We will refer to e C as the lab frame. The rigid body will be referredto as a rigid rotor (also known as a top).
13
-
8/13/2019 Rig Rotor
14/41
5 Kinetic energy of a rigid rotorBy differentiation we nd the velocity of particle k with respect to the labframe,
ddt
(CP k) = ddt e C r k(t) = e C r k(t) = e C F (t) r k(0) (44)because, as stated above, we assume the mass center to be stationary. Bymeans of the following lemma we can rewrite the vector on the right-handside of the following equation:
r k(t) F (t) r k(0) = F (t) F (t) 1 r k(t). (45)
Lemma 3.
If F (t) is orthogonal then F (t) F (t)
T
is antisymmetric,
F (t) F (t)T =0 3(t) 2(t)3(t) 0 1(t)
2(t) 1(t) 0(t). (46)
In the Euler parametrization we have
=123
= M
, (47)
with
M :=0 sin cos sin 0 cos sin sin 1 0 cos
(48)
Proof Because F (t) F (t)T = 1 we nd that
0 = 1 = F (t) F (t)T + F (t) F (t)T = F (t) F (t)T + F (t) F (t)T ,
and henceF (t) F (t)T = F (t) F (t)T
T ,
so that Eq. (46) follows. In order to prove Eq. (48) we write, by usingTheorem 1, which gives the Euler parametrization of F (t), Eqs. (24)(26)for the differentiation of rotation matrices and Eq. (30) for the transformation
14
-
8/13/2019 Rig Rotor
15/41
properties of the L i ,
(t) = F (t) F (t)T = R z() R y( ) R z( ) + R z() R y( ) R z( )+ R z() R y( ) R z( ) R z( )T R y( )T R z()T
= L z + R z() L y R z ()T + R z() R y( ) L z R z() R y( )
T
= L z + ( L x , L y, L z )sin cos
0 + ( L x , L y , L z)
cos sin sin sin
cos
= ( sin + cos sin ) L x + ( cos + sin sin ) L y+( + cos ) L z .
From this we nd (t), recalling from Sec. 3 that (t) = i i(t)L i ,
=123
=0 sin cos sin 0 cos sin sin 1 0 cos
, (49)
which proves the lemma.
Note One may wonder: do angular coordinates y (t) = ( y1(t), y2(t), y3(t)) existsuch that y (t) = (t)? That is, can one solve the equations y (t) = M q (t)
[Eq. (49)]? [Here we introduced a vector consisting of three Euler angles:q := ( ,, ).] To answer this question we recall from the theory of differen-tial equations that it is necessary that the matrix M satises the conditions
M jkq i
= M ik
q j ,
for the equations to be solvable. Obviously M does not satisfy these condi-tions. For instance,
M 22q 1
= sin = M 12
q 2 = 0,
and hence no coordinates are associated with the angular velocities.
Returning to the velocity of particle k we consider f C = e C F (t) [cf.Eq. (37)] and since by lemma 3 F (t) = F (t), we nd
ddt
CP k = ddte C F (t) r k(0)= e C F (t)r k(0) = e C r k(t)= e C r k(t), (50)
15
-
8/13/2019 Rig Rotor
16/41
where = M q and M is given in Eq. (48).
We may also write the velocity in the body-xed frame f C (t),ddt CP k = e C F (t)r k(0) = f C (t) F 1F r k(0)
= f C (t) bf r k(0), (51)where
bf := F 1 = F 1 M q . (52)
(See Theorem 3 for the correspondence F 1 F F 1 .) We deneN := F 1M . (53)
In the Euler parametrization we get an explicit expression for N ,
N = R z() R y( ) R z( )T M =
sin cos sin 0sin sin cos 0
cos 0 1. (54)
In order to compute the kinetic energy T of the rigid body, it is convenientto dene
X k(t) :=0 z k (t) yk(t)z k(t) 0 xk (t)
yk(t) xk(t) 0
. (55)
It is easy to show by matrix multiplication that
X k(t)T X k(t) = r k(t) r k(t) 1 r k(t)r k(t), (56)which shows that we may dene the inertia tensor I by
I (t) :=n
k=1
mkX k (t)T X k (t).
From Theorem 3 we nd X k(t) = F (t)X k(0)F (t)T , so that
I (t) = F (t) I (0) F (t)T . (57)
We can choose F (t) such that it diagonalizes the instantaneous inertia tensor,i.e., for each t the following relation holds
F (t)T I (t) F (T ) = diag I 11 (0), I 22(0), I 33(0) . (58)
Then f C (t) [cf. Eq. (37)] is a principal axes frame .
16
-
8/13/2019 Rig Rotor
17/41
By Eqs. (50) and (31)
ddt
CP k = e C r k(t) = e C r k(t) = e C X k(t) . (59)To show that we do not loose any kinetic energy terms by choosing the originO of the lab frame in the center of mass C , we consider the general expression,cf. Eq. (42),
T = 12n
k=1
mk OP k OP k = 12
k
mk OC + CP k
OC + CP k= 12 M c(t)
2 + c(t) k
mk pk + 12 T I (t)
= 12 M c(t)2 + 12
T I (t) , (60)
where we used that
0 =k
mk CP k =k
mk CP k = e C k
mk pk . (61)
The kinetic energy consists of a translational part, 12 M c(t)2, and a rotational
part 12 T I (t) . We see that the rotation and translation energy are strictly
additive, there is no coupling between the two.
Recall
q q 1q 2q 3
, = M q and bf = N q . (62)
ThenT rot = 12 q
T M T I (t) M q . (63)
Using Eqs. (53) and (57), we also nd
T rot = 12 qT N T I (0) N q . (64)
In general one denes the metric tensor by (summation convention is used)
2T = gij q i q j , or 2T = q T g q , (65)
so that we have here
g = M T I (t) M = N T I (0) N . (66)
17
-
8/13/2019 Rig Rotor
18/41
Equations (63) and (64) give the kinetic energy in the Lagrange formal-ism. In order to write it in the Hamilton formalism we dene the generalized(covariant) momentum,
pk := T q k = gkj q j or p = g q . (67)
Then q i = gij p j or q = g 1 p , so that
2T rot = p T g 1 p = p T M T I (t) M 1 p = p T N T I (0) N 1 p . (68)
We can rewrite this expression by introducing the angular momentum L withrespect to C ,
L = k mk Lk k mk CP k
CP k= e C
k
mk r k(t) r k(t)= e C
k
mk r k(t) X k(t) = e C
k
mk X 2k (t)
= e C I (t) = e C I (t) M q =: e C L sf . (69)Hence
L sf = I (t) M q = M T L sf = g q = p . (70)
If the external torque k mkCP k CP k = 0 then d L/dt = 0, and L sf is aconstant of the motion. Substitution of p = M T L sf into (68) gives2T rot = L sf
T I (t) 1 L sf . (71)
We repeat the same calculation in the body-xed frame using Eq. (51) andTheorem 3,
L = f C (t)k
mk r k(0) F 1 F r k(0)= f C (t)
k
mk r k(0) X k(0) F (t) 1 = f C (t)
k
mk X k(0)2 F (t) 1
= f C (t) I (0) F (t) 1 = f C (t) I (0) N q , (72)
18
-
8/13/2019 Rig Rotor
19/41
where in the last step we have used Eqs. (52) and (53). Hence, we may dene
L bf := I (0) N q , (73)
and by (66)N T L bf = g q = p , (74)
so that from the rightmost side of Eq. (68)
2T rot = ( L bf )T I (0) 1 L bf . (75)
Since in Eq. (72) f C (t) depends on time we cannot conclude from d L/dt = 0that dL bf /dt = 0. Thus, L bf is in general not a constant of the motion.
Note that L bf and L sf have the usual relationship existing between body-
and space-xed coordinates, since from Eqs. (73), (53), (57) and (70) we have
F (t) L bf = F (t) I (0) F 1(t) M q = I (t) M q = L sf . (76)
In summary , we have written the classical kinetic energy as,
2T rot = q T M T I (t) M q = q T N T I (0) N q (Lagrange)= p T M T I (t) M 1 p = p T N T I (0) N 1 p (Hamilton)= L sf T I (t) 1 L sf space-xed
= L bf T I (0) 1 L bf
body-xed(angular momentum)
(77)The angular momentum L is,
L = e C I (t) M q = f C (t) I (0) N q= e C (M T ) 1 p = f C (t) (N T ) 1 p . (78)
The angular velocity is:
= M q and bf = N q . (79)
The linear momentum pk = T/ q k is
p1 p2 p3
= M T I (t) M
= N T I (0) N
. (80)
It is of interest for statistical mechanics to have the explicit form of theclassical body-xed Hamilton function. Using N [Eq. (54)] and taking a
19
-
8/13/2019 Rig Rotor
20/41
body-xed frame for which I (0) is diagonal with the inertia moments I 1, I 2and I 3 on the diagonal, we get
2T rot = pT
N T I (0)N 1 p
= 1I 1 sin2
(( p p cos )cos p sin sin )2 (81)+
1I 2 sin2
(( p p cos )sin + p sin cos )2 + 1I 3
p2 ,
where p p1, p p2, p p3.
6 The Euler equations
The classical equations of motion for the rigid rotor in the absence of anexternal torque (Eulers equations) follow directly from the following results(all proved above):
dL sf
dt = 0 (no external torque)
F (t) = F (t) (lemma 3) L sf = L sf (lemma 2)
F 1( L sf ) = bf L bf (corollary to lemma 2 ).Now,
0 = dL sf
dt =
ddt
F (t) L bf = F (t) L bf + F (t) L bf
= L sf + F (t) L bf .And so,
L bf = L bf bf . (82)Noting that [Eqs. (78) and (79)]
L bf = I (0) bf , (83)
we can rewrite these equations as follows
I 1(0) bf 1 = I 2(0) I 3(0) bf 2 bf 3I 2(0) bf 2 = I 3(0) I 1(0) bf 3 bf 1 (84)I 3(0) bf 3 = I 1(0) I 2(0) bf 1 bf 2 .
20
-
8/13/2019 Rig Rotor
21/41
In the case of a spherical top, where by denition I 1(0) = I 2(0) = I 3(0), theright-hand sides of Eq. (84) vanish, so that b and L bf are constants of themotion.
In the case of a symmetric top, I 1(0) = I 2(0), only bf 3 and L bf 3 areconstants of the motion. Note nally that
L bf L bf = L sf L sf , (85)so that ( Lbf )2 is always a constant of the motion, irrespective of the symmetryof the top.
The Euler equations (84) cannot be integrated as they stand, since bf
and are not time derivatives of certain coordinate vectors. Transformationto Euler angles and their time derivatives is necessary before integration can
be performed.
7 QuantizationUsing the quantization rule
pi i q i
(86)
we nd from Eq. (78) that the angular momentum operator becomes,
L i e C (M T ) 1 // / = i f C (t) (N T ) 1 // /
=: e C J 1J 2J 3
=: f C P 1P 2P 3
. (87)
Matrix inversion gives
N 1 = 1
sin
cos sin 0sin sin sin cos 0cos cos cos sin sin
(88)
and so the body-xed angular momentum operators become,
P 1 = i cos sin
sin
cot cos
P 2 = i sin sin
cos
+ cot sin
(89)
P 3 = i
.
21
-
8/13/2019 Rig Rotor
22/41
From
M 1 = 1sin
cos cos sin cos sin sin sin cos sin 0cos sin 0
(90)
we nd the space-xed angular momentum operators ,
J 1 = i cos cot
+ sin
cossin
J 2 = i sin cot cos
sin sin
J 3 = i
. (91)
In order to obtain the kinetic energy operator we cannot simply depart from
any of the classical expressions (77) for T rot . We must use the Laplace-Beltrami operator,
2T rot = 22 = 2 g 1/ 2 q i
g1/ 2 gij q j
, (92)
where g is the determinant of the metric tensor g. Further gij (g 1)ij .Note that Eq. (92) is equivalent to the classical expression 2 T rot = p T g 1 p ,because classically g1/ 2 commutes with p . By Eq. (66) we nd for g,
g
det( g ) = det( N T I (0) N ) = I 1I 2I 3 det(N )2 = I 1I 2I 3 sin2 , (93)
where I 1, I 2 and I 3 are the principal moments of inertia [the eigenvalues of I (0)]. Hence
2T rot = 2
sin
,
,
sin N 1 I (0) 1 (N T ) 1// /
. (94)
This expression can be rewritten in terms of the angular momentum operatorsJ i and P i . This is possible because of the following relations
i sin
,
,
sin N 1 = P 1, P 2, P 3 (95)
i sin
,
,
sin M 1 = J 1, J 2, J 3 . (96)
22
-
8/13/2019 Rig Rotor
23/41
Using Eq. (88) for N 1 we nd differentiating the different columns,
i sin cos
+ sin sin
+ cos sin + cos cos cos sin
= P 1,
i sin sin
+ sin cos
+ cos cos cos sin cos cos
= P 2,
i sin sin
= i
= P 3, (97)so that we have indeed Eq. (95). The proof of Eq. (96) runs along the very
same lines. Here too, some scalar terms appear that cancel mutually.Hence from Eq. (94), and assuming that f C is a principal axes frame, [cf.
Eq. (58)], we nd
2T rot =i
P i I (0) 1ii P i (98)=
ij
J i I (t) 1 ij J j . (99)
Note that although these expressions have the same form as their classical
counterparts [Eqs. (77)], one cannot simply state the quantization rules Lsf i J i and Lbf i P i . As the derivation shows, the similarity of the classical
and quantum forms is due to Eqs. (95) and (96), and hence to some extentcoincidental.
8 Rigid rotor functionsConsider an angular momentum operator L acting on an abstract Hilbertspace H, [do not confuse this L with the classical vector of Eq. (69) or theantisymmetric 3 3 matrices of Eq. (22)]
L L1L2L3
with Li , L j = ik
ijk Lk . (100)
Dene alsoL := L1 i L2 . (101)
23
-
8/13/2019 Rig Rotor
24/41
From the commutation properties [Eq. (100)] alone it can be shown that Hcontains subspaces carried by kets | lm satisfying
L2
|lm = l(l + 1)
|lm (102a)
L3| lm = m| lm (102b)L | lm = l (l + 1) m(m 1)
1/ 2
| lm 1 . (102c)It is not difficult to prove that the exponential operator
e i (103)
gives an active rotation of | lm around n over an angle |n |. Choosing nsuccessively along the z , y and z axis and applying (103) three times, we de-
ne an operator that represents a R 3
rotation (in the Euler parametrization,see Theorem 1) on the Hilbert space HU (,, ) := e iL 3 e iL 2 e iL 3
We now introduce the so-called Wigner D-matrix by
D (l)mm ( ) := lm | U (,, ) | lm . (104)Below we shall show that
U (, 0, 0) L2 U (, 0, 0) = ( sin , cos )L1L2 (105)
U (,, 0) L3 U (,, 0) = (cos sin , sin sin , cos )L1L2L3
.(106)
Knowing this, we consider
U ( ) = iL3 U ( )
U ( ) = ie i L 3
L2 ei L 3
U ( )
= i(sin , cos )L1L2
U ( )
U ( ) = ie i L 3 e i L 2 L3 ei L 2 ei L 3 U ( )
= i(cos sin , sin sin , cos )L1L2L3
U ( )
24
-
8/13/2019 Rig Rotor
25/41
or
//
/
U ( ) =
i
0 0 1
sin cos 0
cos sin sin sin cos
L1L2L3
U ( )
(107)Equation (48) shows that the matrix in Eq. (107) is M T . From Eq. (87)follows (with = 1)
J 1J 2J 3
= i M T 1
// /
(108)
so that
J i U ( ) = Li U ( ). (109)This expression relates the angular momentum operators Li acting on theabstract Hilbert space H to the rigid-body angular momentum operators.Consider the action of J 3 on the D-matrix,
J 3 D(l)mm ( ) = lm | J 3 U | lm = lm | L3 U | lm
= m D(l)mm ( ), (110)
where we used L3 = L3. Complex conjugate and use J i = J i thenJ 3 D (l)mm ( )
= m D (l)mm ( ). (111)
Likewise we nd
J D(l)mm ( )
= l(l + 1) m(m 1)1/ 2 D (l)m 1,m ( )
. (112)
From J 2 = J + J + J 3( J 3 1) we derive easilyJ 2 D (l)mm ( )
= l(l + 1) D (l)mm ( ) . (113)
Similar relations can be derived for the body-xed operators P i . Instead of modifying the above procedure, we proceed as follows. From Eqs. (87) and(37) follows
i
R ij ( ) J i = P j . (114)where we changed the notation from F (t) to R ( ). From Eq. (109) wend
i
R ij J i U = i
R ij L i U . (115)
25
-
8/13/2019 Rig Rotor
26/41
Use the relation (proved below)
i
R ij ( ) Li = U ( ) L j U ( ). (116)
Then Eq. (115) becomes
P j U ( ) = U ( ) L j , (117)which is the counterpart of Eq. (109). Computing matrix elements, complexconjugation and using P j = P j we obtain
P 3 D(l)mm ( )
= m D (l)mm ( ) (118a)
P D(l)mm ( )
= l(l + 1) m (m 1)1/ 2 D (l)mm 1 ( )
(118b)
P 2 D (l)mm ( ) = l(l + 1) D (l)mm ( ) . (118c)Note that the role of the step-up and step-down operators is interchanged.
The complex conjugate of a Wigner D-matrix is an eigenfunction of asymmetric top Hamiltonian. Indeed, a symmetric top is characterized byI (0) 11 = I (0)
12 and hence we nd from Eq. (98)
2T rot = I (0) 11 P 2 + I (0) 13 I (0) 11 P 23 . (119)From Eq. (118a) and (118c) we nd the eigenvalue equation
2T rot D(l)mm ( )
= l(l + 1) I (0) 11 + ( m)2 I (0) 13 I (0) 11 D
(l)mm ( )
.(120)
Since D (l)mm ( ) is an eigenfunction of the rigid rotor kinetic energy oper-
ator it is sometimes referred to as a rigid rotor function .
It rests us to prove Eq. (116) from which Eq. (105) and (106) follow asspecial cases. We will prove rst a similar result for the ( n ,) parametriza-tion, cf. Eq. (17).
Theorem 4Let n be an arbitrary unit vector and be an angle, then solely from[Li , L j ] = i k ijk Lk we nd
ei L1L2L3
e i = R (n ,)L1L2L3
(121)
where R (n ,) is given by Eq. (17).
26
-
8/13/2019 Rig Rotor
27/41
Proof Recursively we introduce a notation for multiple commutators
A, B(0)
:= A (122)
A, B (k+1) := A, B (k) , B . (123)
Thus, e.g. A, B (2) = A, B (1) , B = A, B , B .In this notation we can write
e i L ei =
k=0
1k!
k L , in L (k) . (124)This famous relation (sometimes erroneously referred to as the Baker-Campbell-
Hausdorff theorem) follows easily from the Taylor expansion of F () e i L ei and F (0) = L . Indeed,
F () =
k=0
1k!
kdkF dk
=0(125)
anddF d
= (in L ) F () + F () (in L ) = F (), in Lso that
dF d
=0 = L , in L .Likewise from
d2F d2
=dF ()
d , in L = F (), in L , in L
it follows that
d2F d2 =0 = L , in L , in L ,and similarly for the higher terms.
The multiple commutators satisfy
L , in L (2k+1) = (1)k L , in L (126)L , in L (2k) = (1)k L (n L )n . (127)Note that Eq. (127) only holds for k > 0, whereas Eq. (126) holds for k 0.Equation (126) is trivially true for k = 0. We prove Eq. (127) for k = 1 by
27
-
8/13/2019 Rig Rotor
28/41
using a abcab c = bb cc bc cb :La , in L , in L = ( i)2
b,c
nbnc [La , Lb], Lc
= ib,c,d
nbnc abd Ld, Lc
=b,c,d,e
nbnc abd dce Le
=b,c,e
nbnc ac be ae bc Le=
b
nbna Lb b
nbnb La
= na (n
L )
La .
HenceL , in L (2) = L , in L , in L = n (n L ) L , (128)
so that Eq. (127) holds for k = 1.We prove Eq. (126) for k 1 as follows
L , in L (2k+1) = L , in L (2k) , in L= ( 1)k (L (n L ) n ), in L (by induction)= (
1)k L , in
L (since n
L , n
L = 0) .
In order to prove Eq. (127) for any k, we write
L , in L (2k) = L , in L (2k 1) , in L= ( 1)k 1 L , in L , in L (by induction)= ( 1)k L n (n L ) by Eq. (128) .
Next we split the sum on the right-hand side of Eq. (124) as follows,
L +
k=1
2k
(2k)!L , i n
L (2k) +
k=0
2k+1
(2k + 1)!L , i n
L (2k+1)
= L + L (n L ) n
k=1
(1)k(2k)!
2k
+ L , i n L
k=0
(1)k(2k + 1)!
2k+1
= L + L (n L ) n (cos1) + L , i n L sin= L cos + ( n L ) n (1 cos) + L , i n L sin.
28
-
8/13/2019 Rig Rotor
29/41
Finally,La , in L =
b,c
nb abc Lc = (n L )a (129)or
L , i n L = L n . (130)Hence
F () = L cos + n (n L ) (1 cos) + ( L n ) sin .Recalling from the proof of Eq. (17) that
R (n ,)L 1 + sin N + (1 cos)N 2]L= L cos + sin (n L ) + (1 cos)(n L )n
and noting that sin (n L ) = sin( )( L n ), while the cosine is even, wesee that Theorem 4 follows.
Equation (116) follows as an easy corollary. First take n = (0 , 0, 1). WriteU := exp[i L3]. Then from Theorem 4:
U L1L2L3
U =cos sin 0sin cos 0
0 0 1
L1L2L3
(131)
By taking n = (0 , 1, 0) we get the analogous relation for rotation around they-axis.
Note Provided is not any of the Euler angles contained in J i , Theorem 4 holds for( J 1, J 2, J 3) as well. Dening P i = P i the theorem holds also for ( P 1, P 2, P 3).
9 The quantized energy levels of rigid rotors
For more details about the material in this section see the book by W. Gordyand R. L. Cook Microwave Molecular Spectra , 3rd Ed. Wiley, New York 1984.
Let us order the inertia moments (the eigenvalues of the inertia tensor)of the rigid rotor:
I a I b I c or A B C,where the rotational constants A, B, and C are half the inverse of the corre-sponding inertia moments, thus A = 1/ (2I a ), etc. The kinetic energy of the
29
-
8/13/2019 Rig Rotor
30/41
rotor takes the form [Eq. (98)]
T = P 2a2I a
+ P 2b2I b
+ P 2c2I c
(132)
= AP 2a + BP 2b + C P 2cOne can distinguish four kinds of rotors:
1. A = B = C , the so-called spherical top. Clearly T spher = BP 2. Recallthat by Eq. (118c) the Wigner D-matrix is an eigenfunction of P 2,hence
T spher D( j )mk ( )
= Bj ( j + 1) D ( j )mk ( ). (133)
An example of a spherical top is a tetrahedrally or octahedrally shapedbody.
2. A > B = C , the so-called prolate top. Clearly T prol = BP 2+( AB)P 2a .We dene Euler angles p, p and p by expressing the principal axesof inertia (the eigenvectors of the inertia tensor) with respect to theframe e C with origin at the center of mass of the top and parallel to aspace-xed frame,
(f b, f c , f a ) = ( e x , e y , e z ) R ( p p p). (134)The vector f a plays the role of f z and hence from Eqs. (118a) and(118c)
T prol D( j )mk ( p p p)
= B j ( j + 1) + ( A B) k2 D( j )mk ( p p p)
. (135)
A prolate top is cigar shaped with the cigar axis being at least a 3-foldrotation axis.
3. A = B > C , the so-called oblate top. Clearly T obl = BP 2 + ( C B)P 2c .We dene Euler angles o, o and o by expressing the principal axesof inertia (the eigenvectors of the inertia tensor) with respect to the
frame e C (f a , f b, f c) = ( e x , e y , e z ) R ( o o o). (136)The vector f c plays the role of f z and hence from Eqs. (118a) and(118c)
T obl D( j )mk ( p p p)
= B j ( j + 1) + ( C B) k2 D( j )mk ( p p p)
. (137)
An oblate top is frisbee shaped with its rotational axis being at least a3-fold rotation axis.
30
-
8/13/2019 Rig Rotor
31/41
4. A > B > C , the so-called asymmetric top. The kinetic energy can berewritten in different ways. The choice depends on the relative size of B C and A B, because it is common to stay as close as possibleto the symmetric top. Assuming that B C < A B (the top isprolate-like), we writeT asym = 12 (B + C )P 2 + A12 (B + C ) P 2a +
14
(B C )(P 2+ + P 2 ), (138)where P = P biP c. If the last term were not present in Eq. (138) theWigner D-matrix would be an eigenfunction. In the oblate-like limit
T asym = 12 (A + B)P 2 + C 12 (A+ B) P 2c + 14
(AB)(P 2+ + P 2 ), (139)
where P = P aiP b.The rotational energy levels of the rst three tops are simply their eigenval-ues. Note that the levels of a prolate top increase with increasing |k|, whilethose of an oblate top decrease with increasing |k|. This is because A Band C B are positive and negative, respectively. The levels with k aredegenerate.
In the case of an asymmetric top one must numerically diagonalize thekinetic energy operator in order to obtain the energy levels. A suitable basisis a row of the D-matrix characterized by a certain xed m. When the toprotates in isotropic space m is conserved and the elements in row m span a2 j + 1-dimensional space that is strictly invariant under P a , P b and P c, sothat no further approximation is introduced by restricting the basis to thisrow.
It is common to label the asymmetric top energy levels by their correla-tion with neighboring prolate and oblate symmetric top energy levels. Thiscorrelation is on basis of symmetry. In order to explain this we use Theorem4. From this theorem we nd that rotation over = around f j ( j = 1, 2, 3)leaves
P j invariant and maps the other two angular momentum components
as P k P k . The rigid rotor kinetic energy being quadratic in the P j sis invariant under these three rotations. The three rotations (plus identity)form a group V 4 (the four group) which is isomorphic to D2.
We nd upon rotation around f b over (f b, f c , f a ) (f b, f c , f a ) R x()
= ( e x , e y , e z ) R ( p, p, p) R x()= ( e x , e y , e z ) R ( p + , p, 2 p), (140)
31
-
8/13/2019 Rig Rotor
32/41
where R x () is dened in Eq. (5). Equation (140) can easily be proved fromthe relations
R x () = R y()R z() = R z()R y() and R x ()R z() = R z (
)R x ()
and the corresponding relations with other subscripts. Hence
R b() : p p + p p p 2 p
In this manner one derives the following table:
p p p o o o
R a () p p + p o + o 2 oR b() p + p 2 p o + o oR c() p + p p o o + o
In order to adapt row m of the D -matrix to V 4 we introduce Wang func-tions , (k 0)
| jk := 1 2 D
( j )m,k ( )
+ ( 1) j + D( j )m, k( )
. (141)
For k = 0 there are two Wang functions, distinguished by the value of = 1, 2,which are degenerate in the case of prolate or oblate symmetric tops. Werecall the following properties of the D -matrix
D ( j )m,k ( + , , 2 ) = ( 1) j D( j )m, k( )
(142a)
D ( j )m,k ( + , , ) = ( 1) j + kD( j )m, k( )
(142b)
D ( j )m,k (,, + ) = ( 1)kD
( j )m,k ( )
(142c)
Writing ( ,, ), we have the Wang functions p | jk a p and o
| jk co
, which are eigenfunctions of T prol and T obl , respectively. These
functions have the symmetry properties given in the following table
p | jk a p o | jk co R a () (1)ka p | jk a p (1)o o | jk co R b() (1)p p | jk a p (1)o + kc o | jk co R c() (1)p + ka p | jk a p (1)kc o | jk co
This table can be derived easily from the properties in Eqs. (142a)(142c).
32
-
8/13/2019 Rig Rotor
33/41
0 Ba
1 Bc B
b
2 Ba A
3 Bc B
b
3 Bb B
a
2 Bc A
1 Bb B
a
0 B c
ka 1 2 k
c 1 2
o
p
Bc (3 30 )
Bb (3
31)
Ba (3 21 )
A (322
)
Bc (3 12 )
Bb (3 13 )
Ba (3 03 )
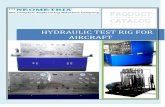
Figure 1: Example of an energy level correlation diagram for j = 3. On the left the prolate symmetric top limit for which the values with p = 1, 2 are degenerate. On the right the oblate limit. The symmetry labels correspond-ing to o = 1, 2 are given. In the middle the asymmetric top levels with their symmetry and the j ka kc designation.
The group V 4 has the following character table:
V 4 E R a () R b() R c()A 1 1 1 1
Ba 1 1 1 1Bb 1 1 1 1Bc 1 1 1 1
The Wang functions are of denite symmetry, their symmetry assignmentis
33
-
8/13/2019 Rig Rotor
34/41
k p | jk a p o | jk co e e A Ae o Ba Bco e Bb Bao o Bc Bb
Here e stands for even value and o for odd value of k and . By inspection of this table we nd that p | j, k a , ka + kc (i.e., p = ka + kc) has the samesymmetry as o | j, k c, ka .
The correlation of asymmetric top levels with symmetric top levels goes asfollows. On the left we draw prolate levels (increasing with increasing |k|) of certain j and on the right the oblate levels (decreasing with increasing |k|) of the same j . By means of the above table we make the symmetry assignment.In the middle we draw the energy level diagram of the asymmetric top (forinstance obtained from numerical diagonalization). We assume that the V 4symmetries of the asymmetric top levels are known. Then we draw a linefrom the middle level to the nearest level on the left of the same symmetry,say it has quantum number ka , and to the right also with the same symmetry,which has quantum number kc. The asymmetric top level in the middle isdesignated by jka kc . See Fig. 1 for an example with j = 3.
10 Angular momenta and Lie derivativesTo introduce the manner in which Lie derivatives, innitesimal rotations,and their connection with angular momenta, can be derived, we consider afunction f (), 0 < 2. Active rotation of the function over gives
R() f () = f (). (143)(The minus sign appears here to satisfy a homomorphism condition, see E.P.Wigner, Group Theory and Its Application to the Quantum Mechanics of Atomic Spectra , Academic Press, 1959.)
Assuming f to be analytic we can make a Taylor expansion
f () = f () dd
f + 12!
2 d2
d2 f +
= e d/d f (). (144)
For innitesimal rotations over , ( )2, the rotation operatorR( ) exp[ d/d ] can be approximated by
R ( )1 dd
. (145)
34
-
8/13/2019 Rig Rotor
35/41
This equality holds strictly in the limit 0. The operator
d/d i
Lz
generates the innitesimal rotation of f () over . In group theory i Lz
is known as a Lie derivative . In this example the Lie derivative only differsin sign from the ordinary derivative d/d . In physics Lz is known as the z component of a one-particle angular momentum operator.A Lie derivative can be computed if we take to depend on a parametert, such that the curve (t) passes through 0, i.e. (0) = 0. The velocity in0: (0) := [d/dt ]t=0 is not equal to zero. Then writing (t) = (t) weget by the chain rule
df (t)dt t=0 =
df ()d =0
d(t)dt t=0 .
Since
df ()d =0 = df ()d and d(t)dt t=0 = (0),we obtain
df (t)dt t=0
= (0) dd
f . (146)
If we write this as
df (t)dt t=0
= lim t 0
f t
= lim t 0 t f , (147)
or f =
df ()d
,
we see that the innitesimal generator d/d can be obtained by consid-ering [df (t) /dt ]t=0 . This differentiation picks out the second (linear) termin the Taylor expansion of f (), i.e., it makes a linear approximation tothe rotated function.
10.1 Innitesimal rotations of functions f (r )After this preamble we consider an arbitrary function f (x ,y,z ) = f (r ) and arotation R (t) with R (0) = 1 and R (0) = . The matrix is antisymmetric.We will show that the well-known orbital angular momentum operator is agenerator of an innitesimal rotation of the function f (r ). We considerf r (t) f R (t) 1 r , where the inverse of R (t) appears to satisfy thehomomorphism condition, cf. Wigner loc. cit.. We differentiate f r (t) with
35
-
8/13/2019 Rig Rotor
36/41
respect to t at t = 0, which is equivalent to considering the second (linear)term in a Taylor expansion. Invoke the chain rule, use summation convention,and note that at t = 0: r = r ,
df r (t)dt t=0
= f (r )
r i = dr idt t=0
= f (r )
r idR ij (t) 1
dt t=0r j
= ( f ) r . (148)From lemma 2 we know that r = r and by a well-known rule fromvector analysis, we nd
df (r (t))
dt t=0 = (
r
)
f =
(r
) f (r
).
The orbital angular momentum operator is dened as L := i(r ), sothat df r (t)dt t=0
= i( L ) f (r ). (149)This result holds for an arbitrary rotation R (t) with tangent ( ) att = 0. To be more specic we write the matrix R (t) in the xyz -parametrization(Theorem 1)
R (t) = R x 1(t) R y 2(t) R z 3(t) ,
and we get the matrix expression
dR dt t=0
= 1(0) L x + 2(0) L y + 3(0) L z ,so that i i(0). The quantities L i appearing in this equation are 3 3 matrices and must not be confused with the vector operator L . Then,applying Eq. (149), we may write
df r (t)
dt t=0=
i
1
L
x +
2
L
y +
3
L
zf (r ). (150)
The factorization of R (t) into a product of three matrices leads to the resultthat any innitesimal rotation can be expanded as a sum of three innitesimalrotations applied to f (r ): around the z -axis over 3, around the y-axis over 2 and around the x-axis over 1. The differential operators L i span a3-dimensional Lie algebra isomorphic to so(3).In group theory the operator (r ) (acting on f ) is known asthe Lie derivative (of f ) along the tangent . The Lie derivatives form a Lie
36
-
8/13/2019 Rig Rotor
37/41
algebra which is (isomorphic to) the Lie algebra of a transformation Lie group[in this example SO(3)]. The Lie algebra product can be easily established,
(r
)i , (r
) j =
kijk (r
)k
so that
Li , L j = i k ijk Lk .10.2 Innitesimal rotations of functions of Euler anglesLet us next consider a function ( ) of the Euler angles (1, 2, 3) thatspecify the position of a body-xed frame f C with respect to a space-xedframe e C , i.e., as in Eq. (37) we have
f C = e C R ( ). (151)In this case we can also dene innitesimal rotations. More specically
we will show that we can introduce two denitions: acting on the left and onthe right of R ( ). In (Lie) group theory these operations are known as leftand right translations, respectively, on the group manifold. We will relatethis concept to innitesimal rotations of space- and body-xed frames. Leftinnitesimal rotations are generated by space-xed rotor angular momentumoperators J i [cf. Eq. (91)] and those acting on the right by body-xed oper-ators P i [cf. Eq. (89)]. Remember that J i acts on the left subscript of a rigidrotor function and P i on the right subscript, which mnemonically is a usefulfact.
In order to show that J i and P i generate innitesimal rotations, we denean (innitesimal) rotation by acting on f C or on e C . Writing a rotationmatrix in the xyz -parametrization as S ( t ) S z( 3) S y( 2) S x( 1), with = ( 1, 2, 3), we have either
e C = e C S ( t ) , (152)or f C = f C S ( t ) . (153)We shall show that the innitesimal rotation dened by Eq. (152) is generatedby i i i J i and that the generator arising from Eq. (153) is i i i P i .How do the Euler angles transform under Eqs. (152) and (153)? In the caseof (152) we keep f C xed and dene L by
f C = e C R ( L ). (154)
37
-
8/13/2019 Rig Rotor
38/41
From Eqs. (152) and (151)
f C = e C S ( ) R ( L ) = e C R ( )
orR ( L) = S ( ) 1 R ( ) (left translation). (155)
In the case of (153) we keep e C xed and dene R byf C = e C R ( R ). (156)
From Eqs. (153) and (151)
f C = e C R ( ) S ( )
or R ( R ) = R ( ) S ( ) (right translation). (157)
The matrix giving the right translation is not inverted, while the left trans-lation is performed by an inverted matrix. Both translations give a homo-morphic map of the group manifold.
Note that the columns of R ( ) represent the coordinate vectors of thebody-xed frame with respect to the space-xed frame e C . Equation (155)describes a rotation of each coordinate vector individually and hence corre-sponds to a rotation of the rigid body, [which is the inverse of the rotation
Eq. (152) of the space-xed frame]. If no external torque acts on the body(isotropic space), Eq. (155) describes a symmetry operation. On the otherhand, Eq. (157) describes a linear combination of the columns of R ( ). If these are for instance principal axes, then (157) undiagonalizes the inertiatensor, except when 2 or 3 inertia momenta are equal. That is, in the case of a spherical top all matrices S ( ) are symmetry operators, whereas in the caseof a symmetric top rotations around one xed axis are symmetry operators.
To dene the innitesimal rotations we consider
d( )
dt t=0=
i
( )
i =
i(0). (158)
Let us rst compute (0) from the denition Eq. (155), i.e., L . Weuse S (0) = 1 and
dS 1
dt = S 1
dS dt
S 1
so that
dS (t) 1dtt=0
= dS (t)
dtt=0
.
38
-
8/13/2019 Rig Rotor
39/41
Differentiate Eq. (155) and use Eqs. (24)(26),
dR ( )dt t=0
= dS (t)
dt t=0R ( ) =
i
i(0) L i R ( ). (159)
On the other hand, from lemma 3 we obtain
dR ( )dt t=0
= R ( ) t=0 =i
i L i R ( ) (160)
with M (0) . Comparing Eqs. (159) and (160) and recalling that theL i are linearly independent, we nd
i(0) = i = j
M ij j (0)
or (0) = M 1 (0). (161)
Substitution of Eq. (161) into Eq. (158) and use of Eq. (87) gives
d( )dt t=0
= i,j
j (0) M T 1 ji
i
( ) (162)
= i j
j (0) J j ( ). (163)
Since L , we nd that the innitesimal left translation is indeed gener-ated by the space-xed angular momentum operators J i .
It can be shown in general that the left Lie derivatives
L j := i
M T 1 ji
i(164)
span the Lie algebra of the Lie group in question, i.e, SO(3). (Left and righttranslations constitute in fact regular representations of the group). In thecase at hand this yields the so(3) Lie algebra product,
Li , L j =k
ijk Lk (165)
so that with J i = iLi J i , J j = ik
ijk J k . (166)
Let us next consider the innitesimal rotation derived from Eq. (157),i.e., R . Differentiation of this equation yields,
dR ( )dt t=0
= R ( )dS (t)
dt t=0=
i
i(0) R ( ) L i . (167)
39
-
8/13/2019 Rig Rotor
40/41
From Eq. (167) and Eq. (160) we obtain
i
i(0) R ( ) L i R ( ) 1 =i
i L i . (168)
By Eq. (30) applied to the left-hand side of Eq. (168),
i,j
i(0) R( ) ji L j = j
j L j .
From whichR ( ) (0) = M (0). (169)
Using N = R ( ) 1 M [Eq. (53)], we nd
(0) = N 1
(0). (170)Substitute into Eq. (158),
d( )dt t=0
=i,j
j (0)(N T ji ) 1
i( ) (171)
=: j
j (0) j ( ). (172)
The right Lie derivatives j span also the Lie algebra so(3), i.e., they obeythe so(3) product
i , j =k
ijk k . (173)
From Eqs. (87) and (171) follows that the body-xed angular momentumoperator is given by
P i = ii , (174)so that
P i , P j = ik
ijk P k , (175)
where we meet again the famous i in the commutation relations of thebody-xed angular momentum.Note Theorem 4, which holds for P i (i = 1, 2, 3), states that
e iP 3 P 1P 2P 3
eiP 3 = R z ()P 1P 2P 3
,
40
-
8/13/2019 Rig Rotor
41/41
where R z () R (f 3,) is dened in Eq. (5). Here is an arbitrary xedangle. Similar equations hold for rotations around f 1 and f 2. Rotationover = around f 3 gives P 1 P 1, P 2 P 2 and P 3 P 3. Thekinetic energy Eq. (98) is invariant under this map.
Finally we want to point out that
J i , P j = 0, i, j = 1, 2, 3. (176)This follows directly from the fact that the rotations (155) and (157) com-mute, so that also the corresponding innitesimal rotations commute.
It is of some interest to prove this more directly. Equation (114) showsthat J i and P j are related in the same way as the frames [Eq. (151)],
P i =i
R ji ( ) J j . (177)
It can be shown along the lines that led to Eq. (109) that
J i , R jk ( ) =l
ijl Rlk ( ). (178)
From (177) and (178), suppressing in the notation we get,
J k ,
P i =
j
J k , R ji J j = j
R ji J k , J j + J k , R ji J j
= j,l
R ji kjl J l + kjl Rli J j = 0. (179)
Since the kinetic energy of the rigid rotor in the principal axes frame is[Eq. (98)]
T = 12i
P i I 0 1ii
P i , (180)where the inertia moments I (0) ii are constants, it follows directly from (176)that J i commutes with this Hamiltonian.