Research Article Temperature Control via Affine Nonlinear...
14
Research Article Temperature Control via Affine Nonlinear Systems for Intermediate Point of Supercritical Once-Through Boiler Units Hong Zhou, Changkun Liu, Zhi-Wei Liu, and Wenshan Hu School of Power and Mechanical Engineering, Department of Automation, Wuhan University, Wuhan 430072, China Correspondence should be addressed to Wenshan Hu; [email protected] Received 10 April 2014; Revised 21 June 2014; Accepted 21 June 2014; Published 22 July 2014 Academic Editor: Chengjin Zhang Copyright © 2014 Hong Zhou et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. For the operation of the supercritical once-through boiler generation units, the control of the temperature at intermediate point (IPT) is highly significant. IPT is the steam temperature at the outlet of the separator. Currently, PID control algorithms are widely adopted for the IPT control. However, PID cannot achieve the optimal performances as the units’ dynamic characteristic changes at different working points due to the severe nonlinearity. To address the problem, a new control algorithm using affine nonlinear system is adopted for a 600 MW unit in this paper. In order to establish the model of IPT via affine nonlinear system, the simplified mechanism equations on the evaporation zone and steam separator of the unit are established. en, the feedback linearizing control law can be obtained. Full range simulations with the load varying from 100% to 30% are conducted. To verify the effectiveness of the proposed control algorithm, the performance of the new method is compared with the results of the PID control. e feed-water flow disturbances are considered in simulations of both of the two control methods. e comparison shows the new method has a better performance with a quicker response time and a smaller overshoot, which demonstrates the potential improvement for the supercritical once-through boiler generation unit control. 1. Introduction Developing supercritical once-through boiler generation units [1] is of great importance due to the threats of global warming and severe air pollution. e supercritical units have the advantage of high power generation efficiency up to 45%. Moreover, they are able to maintain relatively high efficiency even at low loads. However, as the side effects, the system is severely nonlinear, which is difficult to control. On the one hand, high performance is required for the IPT control, as 1 ∘ C variation of IPT could end up with fluctu- ations of main-steam temperature around 8 ∘ C generally. e variation of main-steam temperature has profound effects on the stability, security, and efficiency of supercritical units. erefore, the IPT control is a key problem to all of the units. On the other hand, more and more distributed energy is integrated into the grid. Renewable energy such as solar and wind power has bad capacity of peak regulation which leads to the increasing requirement of load regulation for the traditional units. To improve the control performance, the nonlinearity must be addressed. For nonlinear systems [2], researchers have developed many control strategies for the IPT control, such as adaptive control [3, 4], fuzzy control [5–7], neural network control [8– 10], predictive control [11–13], and coordinated control [14]. In 2000, ˚ Astr¨ om and Bell established a simplified non- linear model of the drum-boiler unit [15]. e model has been widely used; however, the unbalance between feed- water flow and coal combustion [16] could cause disturbance on steam temperature, and the model cannot be used in the situations of once-through boilers. Fuzzy controller was applied to once-through boiler [17] in 2006, and adaptive control strategy was came up with in 2007 [18] which had good effect on slowly changing system. However, it was not able to deal with the situations of sudden load change. In [19], a fuzzy autoregressive moving average model was proposed and applications of online self-organizing fuzzy logic controller were presented to a boiler-turbine system in a power plant. However, the techniques have been applied for nonmodel-based controller design and the control rules may not be accurate enough as the plant model information is not utilized. e applications of dynamic matrix control Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2014, Article ID 873142, 13 pages http://dx.doi.org/10.1155/2014/873142
Transcript of Research Article Temperature Control via Affine Nonlinear...

Research ArticleTemperature Control via Affine Nonlinear Systems forIntermediate Point of Supercritical Once-Through Boiler Units
Hong Zhou, Changkun Liu, Zhi-Wei Liu, and Wenshan Hu
School of Power and Mechanical Engineering, Department of Automation, Wuhan University, Wuhan 430072, China
Correspondence should be addressed to Wenshan Hu; [email protected]
Received 10 April 2014; Revised 21 June 2014; Accepted 21 June 2014; Published 22 July 2014
Academic Editor: Chengjin Zhang
Copyright © 2014 Hong Zhou et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
For the operation of the supercritical once-through boiler generation units, the control of the temperature at intermediate point(IPT) is highly significant. IPT is the steam temperature at the outlet of the separator. Currently, PID control algorithms are widelyadopted for the IPT control. However, PID cannot achieve the optimal performances as the units’ dynamic characteristic changesat different working points due to the severe nonlinearity. To address the problem, a new control algorithm using affine nonlinearsystem is adopted for a 600MWunit in this paper. In order to establish the model of IPT via affine nonlinear system, the simplifiedmechanism equations on the evaporation zone and steam separator of the unit are established.Then, the feedback linearizing controllaw can be obtained. Full range simulations with the load varying from 100% to 30% are conducted. To verify the effectiveness of theproposed control algorithm, the performance of the new method is compared with the results of the PID control. The feed-waterflow disturbances are considered in simulations of both of the two control methods. The comparison shows the new method has abetter performance with a quicker response time and a smaller overshoot, which demonstrates the potential improvement for thesupercritical once-through boiler generation unit control.
1. Introduction
Developing supercritical once-through boiler generationunits [1] is of great importance due to the threats of globalwarming and severe air pollution.The supercritical units havethe advantage of high power generation efficiency up to 45%.Moreover, they are able to maintain relatively high efficiencyeven at low loads. However, as the side effects, the system isseverely nonlinear, which is difficult to control.
On the one hand, high performance is required for theIPT control, as 1∘C variation of IPT could end up with fluctu-ations of main-steam temperature around 8∘C generally. Thevariation of main-steam temperature has profound effectson the stability, security, and efficiency of supercritical units.Therefore, the IPT control is a key problem to all of theunits. On the other hand, more and more distributed energyis integrated into the grid. Renewable energy such as solarand wind power has bad capacity of peak regulation whichleads to the increasing requirement of load regulation for thetraditional units. To improve the control performance, thenonlinearity must be addressed.
For nonlinear systems [2], researchers have developedmany control strategies for the IPT control, such as adaptivecontrol [3, 4], fuzzy control [5–7], neural network control [8–10], predictive control [11–13], and coordinated control [14].
In 2000, Astrom and Bell established a simplified non-linear model of the drum-boiler unit [15]. The model hasbeen widely used; however, the unbalance between feed-water flow and coal combustion [16] could cause disturbanceon steam temperature, and the model cannot be used inthe situations of once-through boilers. Fuzzy controller wasapplied to once-through boiler [17] in 2006, and adaptivecontrol strategy was came up with in 2007 [18] which hadgood effect on slowly changing system. However, it was notable to deal with the situations of sudden load change.
In [19], a fuzzy autoregressive moving average model wasproposed and applications of online self-organizing fuzzylogic controller were presented to a boiler-turbine system ina power plant. However, the techniques have been appliedfor nonmodel-based controller design and the control rulesmay not be accurate enough as the plant model informationis not utilized. The applications of dynamic matrix control
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014, Article ID 873142, 13 pageshttp://dx.doi.org/10.1155/2014/873142

2 Mathematical Problems in Engineering
(DMC) to a drum-type boiler-turbine system were presentedin [20], but the validation of the step-response model may beunsatisfied in designing theDMC. Sode-Yome et al. proposedsome methods which can be used in stability control ofpower system [21], and the controller was designed forultrasupercritical once-through boiler power plant [22]. Thistype of power plant could be used mainly for base line powergeneration and this technique may not be suitable for thepower plants with frequent load changes.
With rapid development of nonlinear control theory andaffine nonlinear system [23–26], currently exact linearizationtheory [27] has been applied into numerous industrial appli-cations such as nonlinear automatic control of helicopter [28]and power system [29].
In this paper, affine nonlinear system based on exactfeedback linearization [30–32] is adopted on the controlof IPT for supercritical units. The contents of the paperare outlined as follows. In Section 2, by establishing themodel of the evaporation zone and steam separator, theappropriate model via affine nonlinear system is chosen andthe exact feedback linearizing control rules are obtained.Thestability analysis of the chosen nonlinear system is made andsimulations on the PIT control via affine nonlinear systemare conducted in Section 3. In Section 4, to verify the newmethod proposed in the paper, the control performances ofthe nonlinear optimal control and PID control are comparedwith the load varying from 100% to 30%. The results showthe new control method is more effective comparing with theconventional PID as the conclusion is made in Section 5.
2. Modeling and Controller Design via AffineNonlinear Systems
2.1. Model of the Evaporation Zone and Steam-Separator. Inorder to simplify boiler model [33], the following hypothesisis given. (1) The unit is divided into the evaporation zone,steam separator, overheated zone, steam pipeline, and tur-bine. (2) No heat conductions and exchanges exist along thepipe, and the steam has heat-absorbing uniformity. (3) Thesame heat pipes with the uniform diameter and thicknessare used. (4)The radial intensity of heat transferring aroundthe pipe is uniform. (5) The steam in the pipe flows with aconstant speed along the pipe. Here is a list of all physicalparameters used in this paper:
𝐻𝑠𝑚: medium enthalpy at the outlet of the economizer(kJ/kg);
𝑃𝑠𝑚: steam pressure at the outlet of the economizer (MPa);
𝐷𝑠𝑚: feed-water flow at the outlet of the economizer (kg/s);
𝑃𝑧𝑓: steam pressure at the outlet of the evaporation zone(MPa);
𝑇𝑧𝑓: steam temperature at the outlet of the evaporationzone (K);
𝜌𝑧𝑓: steam density at the outlet of the evaporation zone(kg/m3);
𝑀𝑧𝑓𝑗: metal mass of the evaporation zone (kg);
𝐷𝑧𝑓: steamflow at the outlet of the evaporation zone (kg/s);
𝑈𝑧𝑓: internal energy of steam at the outlet of the evapora-tion zone (kJ/kg);
𝑇𝑧𝑓𝑗: metal temperature at the outlet of the evaporationzone (K);
𝐶𝑧𝑓𝑗: specific heat capacity of themetal in evaporation zone(kJ/(kg⋅K));
𝐻𝑧𝑓: steam enthalpy at the outlet of the evaporation zone(kJ/kg);
𝜎𝑧𝑓: average steam density in evaporation zone (kg/m3);
𝑄𝑧𝑓: heat which the steam transfers to the metal pipe inevaporation zone (kJ/s);
𝑄𝑧𝑓𝑓
: heat which the metal pipe transfers to the steam inevaporation zone (kJ/s);
𝐿, 𝑉𝑧𝑓: length (m) and volume (m3) of the evaporation zone;
𝑀𝑓𝑙𝑗: metal mess of the steam separator (kg);
𝐴: inner surface area of the steam separator (m2);
𝑇𝑓𝑙: steam temperature at the outlet of the separator (K);
𝑉𝑓𝑙: volume of the separator (m3);
𝑇𝑓𝑙𝑗: metal temperature at the outlet of the separator (K);
𝐷𝑓𝑙: steam flow at the outlet of the separator (kg/s);
𝜌𝑓𝑙: steam density at the outlet of the separator (kg/m3);
𝐶𝑓𝑙𝑗: specific heat capacity of the separator’s metal(kJ/(kg⋅K));
𝐻𝑓𝑙: steam enthalpy at the outlet of the separator (kJ/kg);
𝑃𝑓𝑙: steam pressure at the outlet of the separator (MPa);
𝑄𝑓𝑙: heat which the steam transfers to the metal pipe inseparator (kJ/s);
𝐶𝑝: specific heat capacity under constant pressure in pipe(constant);
𝑉𝑐: average specific heat capacity of the steam in heat-transfer zone (kJ/(kg⋅K));
𝐵: coal-fired value (kg/s);
Δ𝑇: the steam temperature difference between input andoutput of the economizer (K).
By establishing the differential equations for the super-critical once-through boiler generation units, the modelof the evaporation zone and the steam-separator can beacquired [34, 35].

Mathematical Problems in Engineering 3
2.1.1. Modeling of the Steam Separator. If there is no othersource which transfers heat to the separator, the followingequations can be written as
𝐷𝑧𝑓− 𝐷𝑓𝑙=𝑉𝑓𝑙𝑑𝜌𝑓𝑙
𝑑𝜏,
𝐷𝑧𝑓𝐻𝑧𝑓− 𝐷𝑓𝑙𝐻𝑓𝑙=𝑉𝑓𝑙𝑑 (𝜌𝑓𝑙𝐻𝑓𝑙)
𝑑𝜏+ 𝑄𝑓𝑙,
𝑄𝑓𝑙= 𝛼𝐴 (𝑇
𝑓𝑙− 𝑇𝑓𝑙𝑗) ,
𝑄𝑓𝑙=𝑀𝑓𝑙𝑗𝐶𝑓𝑙𝑗𝑑𝑇𝑓𝑙𝑗
𝑑𝜏.
(1)
As 𝑑𝐻𝑓𝑙/𝑑𝑇𝑓𝑙= 𝐶𝑝, the equation is simplified as
𝑑𝐻𝑓𝑙
𝑑𝜏=𝐷𝑧𝑓(𝐻𝑧𝑓− 𝐻𝑓𝑙)
𝑉𝑓𝑙𝜌𝑓𝑙
−𝑄𝑓𝑙
𝑉𝑓𝑙𝜌𝑓𝑙
,
𝑑𝑄𝑓𝑙
𝑑𝜏=
𝛼𝐴
𝐶𝑝𝑉𝑓𝑙𝜌𝑓𝑙
𝐷𝑧𝑓(𝐻𝑧𝑓− 𝐻𝑓𝑙)
− (𝛼𝐴
𝐶𝑝𝑉𝑓𝑙𝜌𝑓𝑙
+𝛼𝐴
𝑀𝑓𝑙𝑗𝑐𝑓𝑙𝑗
)𝑄𝑓𝑙.
(2)
2.1.2.Modeling of the Evaporation Zone. It is assumed that thesteam and the liquid medium are thoroughly mixed withoutany pressure loss. Therefore, the differential equations arepresented as
𝐷𝑠𝑚− 𝐷𝑧𝑓= 𝑉𝑧𝑓
𝑑𝜌𝑧𝑓
𝑑𝜏,
𝑄𝑧𝑓𝑓
+ 𝐷𝑠𝑚𝐻𝑠𝑚− 𝐷𝑧𝑓𝐻𝑧𝑓= 𝑉𝑧𝑓
𝑑 (𝜌𝑧𝑓𝑈𝑧𝑓)
𝑑𝜏,
𝑄𝑧𝑓𝑓
= 𝐾𝐷𝑛
𝑧𝑓
(𝑇𝑧𝑓𝑗
− 𝑇𝑧𝑓) ,
𝑄𝑧𝑓− 𝑄𝑧𝑓𝑓
= 𝑀𝑧𝑓𝑗𝑐𝑧𝑓𝑗
𝑑𝑇𝑧𝑓𝑗
𝑑𝜏.
(3)
Due to 𝑈𝑧𝑓= 𝐻𝑧𝑓− (𝑃𝑧𝑓/𝜌𝑧𝑓), the result is simplified as
𝑉𝑧𝑓
𝑑 (𝐻𝑧𝑓𝜌𝑧𝑓)
𝑑𝜏= 𝑉𝑧𝑓
𝑑𝑃𝑧𝑓
𝑑𝜏+ 𝑄𝑧𝑓𝑓
+ 𝐷𝑠𝑚𝐻𝑠𝑚− 𝐷𝑧𝑓𝐻𝑧𝑓.
(4)
As 𝑄𝑧𝑓
− 𝑄𝑧𝑓𝑓
= 𝜑𝐵𝑉𝑐Δ𝑇, the equation can be further
simplified as
𝑑𝑄𝑧𝑓𝑓
𝑑𝜏=𝐾𝐷𝑛𝑧𝑓
𝜑𝐵𝑉𝑐Δ𝑇
𝑀𝑧𝑓𝑗𝑐𝑧𝑓𝑗
−𝐾𝐷𝑛𝑧𝑓
𝐶𝑝
𝑑𝐻𝑧𝑓
𝑑𝜏, (5)
where 𝑑𝐻𝑧𝑓/𝑑𝑇𝑧𝑓= 𝐶𝑝, 𝐾𝐷𝑛𝑧𝑓
is considerd as a constant.Meanwhile, the steam evaporated equation is given as
𝐷𝑠𝑚− 𝐷𝑧𝑓= 𝑉𝑧𝑓
𝑑𝜌𝑧𝑓
𝑑𝜏= 𝑉𝑧𝑓
𝜕𝜎𝑧𝑓
𝜕𝑃𝑧𝑓
𝑑𝑃𝑧𝑓
𝑑𝜏= 𝑉𝑧𝑓𝜇𝑧𝑓
𝑑𝑃𝑧𝑓
𝑑𝜏. (6)
The steam momentum equation is
𝑃𝑧𝑓− 𝑃𝑠𝑚
=𝐿𝜀𝐷2𝑧𝑓
𝜌𝑧𝑓
. (7)
The derivative of (7) is
𝑑𝐷𝑧𝑓
𝑑𝜏= −
𝜌2𝑧𝑓
+ 𝜇𝑧𝑓𝐿𝜀𝐷2𝑧𝑓
2𝜌𝑧𝑓𝑉𝑧𝑓𝜇𝑧𝑓𝐿𝜀
+𝜌2𝑧𝑓
+ 𝜇𝑧𝑓𝐿𝜀𝐷2𝑧𝑓
2𝑉𝑧𝑓𝜇𝑧𝑓𝐷𝑧𝑓𝐿𝜀𝜌𝑧𝑓
𝐷𝑠𝑚. (8)
Therefore, the system’s state equation is obtained as
𝑑𝐻𝑓𝑙
𝑑𝜏=𝐷𝑧𝑓(𝐻𝑧𝑓− 𝐻𝑓𝑙)
𝑉𝑓𝑙𝜌𝑓𝑙
−𝑄𝑓𝑙
𝑉𝑓𝑙𝜌𝑓𝑙
,
𝑑𝑄𝑓𝑙
𝑑𝜏=
𝛼𝐴
𝐶𝑝𝑉𝑓𝑙𝜌𝑓𝑙
𝐷𝑧𝑓(𝐻𝑧𝑓− 𝐻𝑓𝑙)
− (𝛼𝐴
𝐶𝑝𝑉𝑓𝑙𝜌𝑓𝑙
+𝛼𝐴
𝑀𝑓𝑙𝑗𝑐𝑓𝑙𝑗
)𝑄𝑓𝑙,
𝑑𝐻𝑧𝑓
𝑑𝜏=
1
𝑉𝑧𝑓𝜌𝑧𝑓
(𝑄𝑧𝑓𝑓
−𝐷𝑧𝑓
𝜇𝑧𝑓
)
+ (1
𝜇𝑧𝑓
+ 𝐻𝑠𝑚− 𝐻𝑧𝑓)
𝐷𝑠𝑚
𝑉𝑧𝑓𝜌𝑧𝑓
,
𝑑𝑄𝑧𝑓𝑓
𝑑𝜏= − (
𝐷𝑧𝑓− 𝜇𝑧𝑓𝑄𝑧𝑓𝑓
𝐶𝑝𝑉𝑧𝑓𝜌𝑧𝑓𝜇𝑧𝑓
)𝐾𝐷𝑛
𝑧𝑓
+𝐾𝐷𝑛𝑧𝑓
𝜑𝐵𝑉𝑐Δ𝑇
𝑀𝑧𝑓𝑗𝑐𝑧𝑓𝑗
−𝐾𝐷𝑛𝑧𝑓
𝐶𝑝
× (1
𝜇𝑧𝑓
+ 𝐻𝑠𝑚− 𝐻𝑧𝑓)
𝐷𝑠𝑚
𝑉𝑧𝑓𝜌𝑧𝑓
,
𝑑𝐷𝑧𝑓
𝑑𝜏= −
𝜌2𝑧𝑓
+ 𝜇𝑧𝑓𝐿𝜀𝐷2𝑧𝑓
2𝜌𝑧𝑓𝑉𝑧𝑓𝜇𝑧𝑓𝐿𝜀
+𝜌2𝑧𝑓
+ 𝜇𝑧𝑓𝐿𝜀𝐷2𝑧𝑓
2𝑉𝑧𝑓𝜇𝑧𝑓𝐷𝑧𝑓𝐿𝜀𝜌𝑧𝑓
𝐷𝑠𝑚.
(9)
The affine nonlinear system [36] can be defined as
�� = 𝑓 (𝑥) +
𝑚
∑𝑖=1
𝑔𝑖(𝑥) 𝑢𝑖,
𝑦 = ℎ (𝑥) ,
(10)
where the state vector 𝑥 about (9) is 𝑥 = [𝑥1, 𝑥2, 𝑥3, 𝑥4, 𝑥5]𝑇
=
[𝐻𝑓𝑙, 𝑄𝑓𝑙, 𝐻𝑧𝑓, 𝑄𝑧𝑓𝑓, 𝐷𝑧𝑓]𝑇, the control vectors are 𝑢
1= 𝐷𝑠𝑚

4 Mathematical Problems in Engineering
and 𝑢2= 𝐵, and the vectors 𝑓(𝑥), 𝑔
1(𝑥), and 𝑔
2(𝑥) can be
written as
𝑓 (𝑥)
=
[[[[[[[[[[[[[[[[[[[[
[
𝐷𝑧𝑓(𝑥3− 𝑥1)
𝑉𝑓𝑙𝜌𝑓𝑙
−𝑥2
𝑉𝑓𝑙𝜌𝑓𝑙
𝛼𝐴
𝐶𝑝𝑉𝑓𝑙𝜌𝑓𝑙
𝐷𝑧𝑓(𝑥3− 𝑥1) − (
𝛼𝐴
𝐶𝑝𝑉𝑓𝑙𝜌𝑓𝑙
+𝛼𝐴
𝑀𝑓𝑙𝑗𝑐𝑓𝑙𝑗
)𝑥2
1
𝑉𝑧𝑓𝜌𝑧𝑓
(𝑥4−𝐷𝑧𝑓
𝜇𝑧𝑓
)
𝑥5− 𝜇𝑧𝑓𝑥4
𝐶𝑝𝑉𝑧𝑓𝜌𝑧𝑓𝜇𝑧𝑓
𝐾𝑥5
−𝜌2𝑧𝑓+ 𝜇𝑧𝑓𝐿𝜀𝑥2
5
2𝜌𝑧𝑓𝑉𝑧𝑓𝜇𝑧𝑓𝐿𝜀
]]]]]]]]]]]]]]]]]]]]
]
,
𝑔1(𝑥) =
[[[[[[[[[[[[[[[
[
0
0
(1
𝜇𝑧𝑓
+ 𝐻𝑠𝑚− 𝑥3)
1
𝑉𝑧𝑓𝜌𝑧𝑓
−𝐾𝑥5
𝐶𝑝𝑉𝑧𝑓𝜌𝑧𝑓
(1
𝜇𝑧𝑓
+ 𝐻𝑠𝑚− 𝑥3)
𝜌2𝑧𝑓
+ 𝜇𝑧𝑓𝐿𝜀𝑥25
2𝑉𝑧𝑓𝜇𝑧𝑓𝑥5𝐿𝜀𝜌𝑧𝑓
]]]]]]]]]]]]]]]
]
,
𝑔2(𝑥) =
[[[[[[[
[
0
0
0
𝐾𝑥𝑛
5
𝑀𝑧𝑓𝑗𝑐𝑧𝑓𝑗
𝜙𝑉𝑐Δ𝑇
0
]]]]]]]
]
.
(11)
2.2. Exact Feedback Linearizing Controller Design. The non-linear system is difficult to solve as the model from (9)includes five independent variables. To simplify the model ofIPT, only the variables and equations which are related to IPTare chosen while others are ignored. The simplified model isexpressed in the general form of affine nonlinear system (10).The chosen equations can be written as
𝑑𝐻𝑧𝑓
𝑑𝜏=
1
𝑉𝑧𝑓𝜌𝑧𝑓
(𝑄𝑧𝑓𝑓
−𝐷𝑧𝑓
𝜇𝑧𝑓
)
+ (1
𝜇𝑧𝑓
+ 𝐻𝑠𝑚− 𝐻𝑧𝑓)
𝐷𝑠𝑚
𝑉𝑧𝑓𝜌𝑧𝑓
,
𝑑𝐻𝑓𝑙
𝑑𝜏=𝐷𝑧𝑓(𝐻𝑧𝑓− 𝐻𝑓𝑙)
𝑉𝑓𝑙𝜌𝑓𝑙
−𝑄𝑓𝑙
𝑉𝑓𝑙𝜌𝑓𝑙
.
(12)
Due to definition of (10), the state vector is 𝑥 = [𝑥1, 𝑥2]𝑇
=
[𝐻𝑧𝑓, 𝐻𝑓𝑙]𝑇, the output vector is 𝑦 = ℎ(𝑥) = 𝐻
𝑓𝑙= 𝑥2, the
control vector is 𝑢 = 𝐷𝑠𝑚, and the vectors 𝑓(𝑥), 𝑔(𝑥) are
𝑓 (𝑥) =
[[[[
[
1
𝑉𝑧𝑓𝜌𝑧𝑓
(𝑄𝑧𝑓𝑓
−𝐷𝑧𝑓
𝜇𝑧𝑓
)
𝐷𝑧𝑓(𝑥1− 𝑥2)
𝑉𝑓𝑙𝜌𝑓𝑙
−𝑄𝑓𝑙
𝑉𝑓𝑙𝜌𝑓𝑙
]]]]
]
,
𝑔 (𝑥) = [
[
(1
𝜇𝑧𝑓
+ 𝐻𝑠𝑚− 𝑥1)
1
𝑉𝑧𝑓𝜌𝑧𝑓
0
]
]
.
(13)
Therefore, the chosen model (12) could be considered as asingle-input and single-output system. The controller basedon exact feedback linearization can be designed through thefollowing steps.
2.2.1. Calculation of Relative Degree and Coordinate Trans-formation. In order to obtain the relative degree, the LIEderivative should be calculated.
Firstly, the LIE derivative is figured out as
𝐿𝑔𝐿0
𝑓
ℎ (𝑥) =𝜕ℎ (𝑥)
𝜕𝑥𝑔 (𝑥) = 0,
𝐿𝑓ℎ (𝑥) =
𝜕ℎ (𝑥)
𝜕𝑥𝑓 (𝑥) =
𝐷𝑧𝑓(𝑥1− 𝑥2)
𝑉𝑓𝑙𝜌𝑓𝑙
−𝑄𝑓𝑙
𝑉𝑓𝑙𝜌𝑓𝑙
,
(14)
𝐿𝑔𝐿𝑓ℎ (𝑥) =
𝜕 (𝐿𝑓ℎ (𝑥))
𝜕𝑥𝑔 (𝑥) =
𝐷𝑧𝑓
𝑉𝑓𝑙𝜌𝑓𝑙𝑉𝑧𝑓𝜌𝑧𝑓
× (1
𝜇𝑧𝑓
+ 𝐻𝑠𝑚− 𝑥1) ,
𝐿2
𝑓
ℎ (𝑥) =𝜕 (𝐿𝑓ℎ (𝑥))
𝜕𝑥𝑔 (𝑥) =
𝐷𝑧𝑓(𝑄𝑧𝑓𝑓
− (𝐷𝑧𝑓/𝑢𝑧𝑓))
𝑉𝑓𝑙𝜌𝑓𝑙𝑉𝑧𝑓𝜌𝑧𝑓
−𝐷𝑧𝑓
(𝑉𝑓𝑙𝜌𝑓𝑙)2
[𝐷𝑧𝑓(𝑥1− 𝑥2) − 𝑄𝑓𝑙] .
(15)
Assuming that (1/𝜇𝑧𝑓) + 𝐻𝑠𝑚
− 𝑥1
= 0 from (15) is satisfied,therefore the relation degree is 𝑟 = 𝑛 = 2.
Secondly the coordinate transformation 𝑧 = Φ(𝑥) can bewritten as
Φ :{
{
{
𝑧1= 𝑥2− 𝑅𝑠,
𝑧2= 𝐿𝑓ℎ (𝑥) =
1
𝑉𝑓𝑙𝜌𝑓𝑙
[𝐷𝑧𝑓(𝑥1− 𝑥2) − 𝑄𝑓𝑙] ,
(16)
where 𝑅𝑠is the referenced steam enthalpy at the outlet of
the separator and also named as the referenced intermediatepoint enthalpy in this paper (𝑅
𝑠=𝐻𝑓𝑙= 2666.89 kJ/kg).

Mathematical Problems in Engineering 5
Finally, a new linear system after coordinate transforma-tion and exact feedback linearization is derived as
��1= 𝑧2,
��2= V = 𝐿
2
𝑓
ℎ (𝑥) + 𝐿𝑔𝐿𝑓ℎ (𝑥) 𝑢,
(17)
where V is named as the optimal control vector of the linearsystem. The linear system is �� = 𝐴𝑧 + 𝐵V, which is acompletely controllable Brunovsky linear system.
2.2.2. Design of Control Law. Using the optimal control law[37], V can be written as
V = − 𝐾𝑧 = − (𝑘1𝑧1+ 𝑘2𝑧2) = −𝑘
1(𝑥2− 𝑅𝑠)
−𝑘2
𝑉𝑓𝑙𝜌𝑓𝑙
[𝐷𝑧𝑓(𝑥1− 𝑥2) − 𝑄𝑓𝑙] ,
(18)
where 𝐾 = 𝑅−1𝐵𝑇𝑃. Assuming that 𝑅 = 1, 𝑃 is the solutionof the following Riccati equation:
𝐴𝑇
𝑃 + 𝑃𝐴 − 𝑃𝐵𝐵𝑇
𝑃 + 𝑄 = 0, (19)
where the Brunovsky standard coefficient matrices 𝐴 and 𝐵are
𝐴 = [0 1
0 0] , 𝐵 = [
0
1] . (20)
𝑄 is a positive definite or semidefinite symmetric matrix.Assuming that 𝑄 = [ 1 0
0 0
], the solution of (19) is derived as
𝑃 = [√2 1
1 √2] , 𝐾 = [𝑘
1𝑘2] = [1 √2] . (21)
Therefore, the optimal control vector V from (18) can bewritten as
V = − (𝑥2− 𝑅𝑠) −
1.414
𝑉𝑓𝑙𝜌𝑓𝑙
[𝐷𝑧𝑓(𝑥1− 𝑥2) − 𝑄𝑓𝑙] . (22)
As the relationship between linearity and nonlinearity is𝑢 = (−𝐿2
𝑓
ℎ(𝑥) + V)/𝐿𝑔𝐿𝑓ℎ(𝑥), the exact feedback linearizing
control law can be obtained as
𝑢 = (−𝐷𝑧𝑓(𝑄𝑧𝑓𝑓
− (𝐷𝑧𝑓/𝑢𝑧𝑓))
𝑉𝑓𝑙𝜌𝑓𝑙𝑉𝑧𝑓𝜌𝑧𝑓
+𝐷𝑧𝑓
(𝑉𝑓𝑙𝜌𝑓𝑙)2
[𝐷𝑧𝑓(𝑥1− 𝑥2) − 𝑄𝑓𝑙])
× (𝐷𝑧𝑓
𝑉𝑓𝑙𝜌𝑓𝑙𝑉𝑧𝑓𝜌𝑧𝑓
(1
𝜇𝑧𝑓
+ 𝐻𝑠𝑚− 𝑥1))
−1
+ (− (𝑥2− 𝑅𝑠) − 1.414
1
𝑉𝑓𝑙𝜌𝑓𝑙
[𝐷𝑧𝑓(𝑥1− 𝑥2) − 𝑄𝑓𝑙])
× (𝐷𝑧𝑓
𝑉𝑓𝑙𝜌𝑓𝑙𝑉𝑧𝑓𝜌𝑧𝑓
(1
𝜇𝑧𝑓
+ 𝐻𝑠𝑚− 𝑥1))
−1
.
(23)
3. Simulation on Control of IPT via AffineNonlinear System
To verify the validation of the law (23) for supercriticalunits, the stability analysis and simulations of the proposedalgorithms are necessary and essential.
3.1. System Stability Analysis. The enthalpy formula is difinedas
𝐻 = 2022.7 + 1.6657𝑇 + 2.96 × 10−4
𝑇2
− 1.356 × 109
𝑇−2.81
𝑝
− 6.1621 × 1024
𝑇−8.939
𝑝2
.
(24)
The enthalpy can be obtained by using (24). Here is thelist of the parameters for a 600MW supercritical unit (boilertype: SG1913/25.40-MXXX). 𝑇
𝑓𝑙= 683.15K, 𝑃
𝑓𝑙= 27.8Mpa,
𝐻𝑓𝑙= 2666.8898 kJ/kg, 𝜌
𝑧𝑓= 167 kg/m3, 𝜌
𝑓𝑙= 100 kg/m3,
𝜇𝑧𝑓= 13.23 (kg/m3)/Mpa, 𝑄
𝑧𝑓𝑓= 417 kJ/s, 𝑄
𝑓𝑙= 1200 kJ/s,
𝐷𝑧𝑓= 486 kg/s, 𝑉
𝑧𝑓= 46.23m3, and 𝑉
𝑓𝑙= 6.29m3.
With these parameters at full load, the equations areobtained as
��1=417 − (𝐷
𝑧𝑓/13.23)
7720.41+ (1863.37 − 𝑥
1)
𝑢
7720.41,
��2=𝐷𝑧𝑓(𝑥1− 𝑥2)
629− 1.91,
(25)
𝑢 = (−𝐷𝑧𝑓(417 − (𝐷
𝑧𝑓/13.23))
4856137.89+
𝐷𝑧𝑓
395641
× [𝐷𝑧𝑓(𝑥1− 𝑥2) − 1200])
× (𝐷𝑧𝑓
4856137.89(1863.37 − 𝑥
1))
−1
+ (− (𝑥2− 𝑅𝑠) −
1.414 ∗ [𝐷𝑧𝑓(𝑥1− 𝑥2) − 1200]
629)
× (𝐷𝑧𝑓
4856137.89(1863.37 − 𝑥
1))
−1
.
(26)
The Lyapunov Law is used to analyze the stability of thesystems (25) and (26). The model (25) can be simplified as
��1= (0.0016𝐷
𝑧𝑓− 1.414) (𝑥
1− 𝑥2) −
629𝑥2
𝐷𝑧𝑓
− 1.916 +629𝑅𝑠
𝐷𝑧𝑓
+1696.8
𝐷𝑧𝑓
,
��2=𝐷𝑧𝑓(𝑥1− 𝑥2)
629− 1.91.
(27)

6 Mathematical Problems in Engineering
+
−
x1
x = f(x) + g(x)u h(x)Rs
u = f(x1, x2)
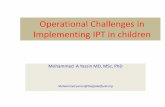
Figure 1: Structure diagram of affine nonlinear system.
Assuming that 𝑇 = −1.916 + (629𝑅𝑠+ 1696.8)/𝐷
𝑧𝑓and (27)
equals 0, 𝑥1, 𝑥2are derived as
𝑥1=1195
𝐷𝑧𝑓
+ 1.91 × (0.0016𝐷𝑧𝑓− 1.414) +
𝑇𝐷𝑧𝑓
629,
𝑥2= 1.91 × (0.0016𝐷
𝑧𝑓− 1.414) +
𝑇𝐷𝑧𝑓
629.
(28)
With the assumptions 𝑥1
= 𝑥1− [(1195/𝐷
𝑧𝑓) + 1.91 ×
(0.0016𝐷𝑧𝑓
− 1.414) + (𝑇𝐷𝑧𝑓/629), 𝑥
2= 𝑥2− [1.91 ×
(0.0016𝐷𝑧𝑓−1.414)+(𝑇𝐷
𝑧𝑓/629)], the vector after derivative
is obtained as
��1= (0.0016𝐷
𝑧𝑓− 1.414) (𝑥
1− 𝑥2) −
629
𝐷𝑧𝑓
𝑥2,
��2=𝐷𝑧𝑓(𝑥1− 𝑥2)
629.
(29)
Therefore, the coefficient matrix can be written as
𝐴 =[[[
[
0.0016𝐷𝑧𝑓− 1.414 −0.0016𝐷
𝑧𝑓+ 1.414 −
629
𝐷𝑧𝑓
𝐷𝑧𝑓
629−𝐷𝑧𝑓
629
]]]
]
.
(30)
At 100% load, 𝐷𝑧𝑓
is 𝐷𝑧𝑓
= 486 kg/s. The eigenvaluesafter introducing 𝐷
𝑧𝑓into (30) are 𝜆
1= −0.7047 + 0.7098𝑖,
𝜆2= −0.7047 − 0.7098𝑖. According to the Lyapunov Law
[38], if all eigenvalues ofmatrix𝐴 have negative real parts, thesystem (25) is asymptotically stable under condition of (28).Therefore the system (25) is asymptotically stable at 100%load. The load is varied from 100% to 30% while keepingother parameters constant.The coefficientmatrix eigenvaluesat different loads are obtained and presented in Table 1.
From Table 1, it is shown that all coefficient matrixeigenvalues have negative real parts. Therefore, the nonlinearsystem is asymptotically stable at different loads.
3.2. SimulationwithDisturbance of Feed-Water Flow. In orderto reflect the real dynamic of the practical system, the feed-water flow disturbance is considered in the simulation. Thestructure diagram of affine nonlinear system is presented inFigure 1.
The model in Figure 1 is from (25), and the controlleroutput is from (26). At 100% load, parameters 𝑅
𝑠and 𝐷
𝑧𝑓
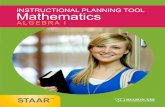
are introduced into the system.The performance without thefeed-water flow disturbance is presented in Figure 2.
0 5 10 15 20 25 30−500
0
500
1000
1500
2000
2500
3000
Hfl(kJ/k
g)
t (s)
Figure 2: Performance of affine nonlinear system on IPT at 100%load.
0 5 10 15 20 25 30−500
0
500
1000
1500
2000
2500
3000H
fl(kJ/k
g)
t (s)
Figure 3: Performancewith the feed-water flowdisturbance at 100%load.
In Figure 2, at 100% load, the system peaks at 2765 kJ/kgwhich means the overshoot is 3.7%, the regulation time is 8 s,and the steady-state output is 2667.4 kJ/kg. Then the noisesignal is considered as the feed-water flow disturbance andinjected into the controller output 𝑢. The system response ispresented in Figure 3.
As shown in Figure 3, sudden increase of the feed-waterflow can lead to the decrease of the intermediate pointenthalpy. The result that the enthalpy of IPT recovers rapidlyafter disturbance means the performances match practicaloperation of the 600MW supercritical unit. Therefore, it isconcluded that the model of affine nonlinear system on IPTin this paper is valid and reasonable.
3.3. Results at Different Loads. To study the affine nonlinearsystem further, more simulations have been conducted on

Mathematical Problems in Engineering 7
0 5 10 15 20 25 30−500
0
500
1000
1500
2000
2500
3000
Hfl(kJ/k
g)
t (s)
(a) 100%
0 5 10 15 20 25 30−500
0
500
1000
1500
2000
2500
3000
Hfl(kJ/k
g)
t (s)
(b) 90%
0 20 40 60 80 100−500
0
500
1000
1500
2000
2500
3000
Hfl(kJ/k
g)
t (s)
(c) 80%
0 5 10 15 20 25 30−500
0
500
1000
1500
2000
2500
3000
Hfl(kJ/k
g)
t (s)
(d) 70%
0 5 10 15 20 25 30−500
0
500
1000
1500
2000
2500
3000
Hfl(kJ/k
g)
t (s)
(e) 60%
0 5 10 15 20 25 30−500
0
500
1000
1500
2000
2500
3000
Hfl(kJ/k
g)
t (s)
(f) 50%
0 5 10 15 20 25 30−500
0
500
1000
1500
2000
2500
3000
Hfl(kJ/k
g)
t (s)
(g) 40%
0 5 10 15 20 25 30−500
0
500
1000
1500
2000
2500
3000
Hfl(kJ/k
g)
t (s)
(h) 30%
Figure 4: Response of affine nonlinear system at different loads.

8 Mathematical Problems in Engineering
Table 1: Coefficient matrix eigenvalues at different loads.
Load proportion Load𝐷𝑧𝑓
(kg/s) eigenvalue 𝜆1
eigenvalue 𝜆2
100% 486 −0.7047 + 0.7098𝑖 −0.7047 − 0.7098𝑖
90% 437.4 −0.7176 + 0.6961𝑖 −0.7176 − 0.6961𝑖
80% 388.8 −0.7180 + 0.6959𝑖 −0.7180 − 0.6959𝑖
70% 340.2 −0.7053 + 0.7091𝑖 −0.7053 − 0.7091𝑖
60% 291.6 −0.7057 + 0.7091𝑖 −0.7057 − 0.7091𝑖
50% 243 −0.7056 + 0.7081𝑖 −0.7056 − 0.7081𝑖
40% 194.4 −0.7060 + 0.7081𝑖 −0.7060 − 0.7081𝑖
30% 145.8 −0.7099 + 0.8783𝑖 −0.7099 − 0.8783𝑖
Table 2: Simulation performances via affine nonlinear system.
Load proportion 𝑅𝑠
= 2666.89 kJ/kg With feed-water flow𝐷𝑧𝑓
(kg/s) 𝑀𝐷
(%) 𝑡𝑠1
(s) 𝜎𝐻
(kJ/kg) 𝑡𝑠2
(s)100% 486 3.7 8 −10.5 490% 437.4 4.1 9 −10 480% 388.8 1.2 11 −9.5 570% 340.2 4.2 9 −9 460% 291.6 3.9 8 −8 650% 243 4.3 9 −7.5 640% 194.4 3.9 10 −11 730% 145.8 4.2 8 −4 5
PIDx2+ +
−
−Rs
1
s(3828 + 60842s)
0.027
(s + 0.06)(s + 0.77)
Figure 5: System structure diagram of PID control on IPT.
IPT for the 600MW supercritical unit at different loads(boiler type: SG1913/25.40-MXXX). While keeping otherparameters constant, different loads leads to different 𝐷
𝑧𝑓,
respectively, in Table 2.Then simulations with the same feed-water flow disturbances have been conducted after substitut-ing 𝐷
𝑧𝑓into (25) and (26). The noise signal is considered
as the feed-water flow disturbance and adopted into thecontroller output 𝑢 at 15 s (except 40 s at 80% load). Thesimulation performances at different loads are presented inFigure 4.
As shown in Figure 4(c), simulations at different loads aresimilar and tend to stability finally.
3.4. Results after Simulation. The results such as the over-shoot𝑀
𝐷, the regulation time 𝑡
𝑠, and the enthalpy difference
𝜎𝐻
are recorded into Table 2 at different loads. (𝑡𝑠1: before
increasing feed-water flow disturbance. 𝑡𝑠2: after increasing
disturbance.)
0 50 100 150 2000
500
1000
1500
2000
2500
3000
3500
Hfl(kJ/k
g)
t (s)
Figure 6: Response of PID control on IPT at 100% load.
The results in Table 2 show that the model of affine non-linear system is able to reduce the enthalpy with the increaseof feed-water flow. Its results matche practical conditions andcan recover stability rapidly.
4. Contrast Study on IPT with PID Control
4.1. Simulation of PID Control
4.1.1. Calculation of System Transfer Function. In engineerapplication, PID control is used widely. To compare it with

Mathematical Problems in Engineering 9
0
500
1000
1500
2000
2500
3000
3500
0 50 100 150 200
Hfl(kJ/k
g)
t (s)
Figure 7: Performance of PID control with feed-water flow at 100%load.
the optimal control, the PID control is applied in this paperto control of IPT. As the model via affine nonlinear system isstate equationwhich cannot be simulated with PID controllerdirectly, it is essential that the system transfer function shouldbe calculated by point approximation linearization. The firstequation of (12) after derivation is obtained as
𝑑 (𝐷𝑠𝑚(𝑡)𝐻𝑧𝑓(𝑡))
𝑑𝑡=𝐻𝑧𝑓(𝑡) 𝑑𝐷
𝑠𝑚(𝑡)
𝑑𝑡+𝐷𝑠𝑚(𝑡) 𝑑𝐻
𝑧𝑓(𝑡)
𝑑𝑡
≈ 𝐻𝑧𝑓(𝑡0)𝑑𝐷𝑠𝑚(𝑡)
𝑑𝑡+𝐷𝑠𝑚(𝑡0)𝑑𝐻𝑧𝑓(𝑡)
𝑑𝑡.
(31)
Both sides of (31) after integrating at 𝑡0can be written as
𝐷𝑠𝑚(𝑡)𝐻𝑧𝑓(𝑡) = 𝐻
𝑧𝑓(𝑡0)𝐷𝑠𝑚(𝑡) + 𝐻
𝑧𝑓(𝑡) 𝐷𝑠𝑚(𝑡0) + 𝐶,
𝐷𝑠𝑚(𝑡0)𝐻𝑧𝑓(𝑡0) = 𝐻
𝑧𝑓(𝑡0)𝐷𝑠𝑚(𝑡0)
+ 𝐻𝑧𝑓(𝑡0)𝐷𝑠𝑚(𝑡0) + 𝐶,
(32)
where 𝐶 = −𝐷𝑠𝑚(𝑡0)𝐻𝑧𝑓(𝑡0).
After substituting 𝐶 into (32), it can be derived as
𝐷𝑠𝑚(𝑡)𝐻𝑧𝑓(𝑡) = 𝐻
𝑧𝑓(𝑡0)𝐷𝑠𝑚(𝑡) + 𝐻
𝑧𝑓(𝑡) 𝐷𝑠𝑚(𝑡0)
− 𝐷𝑠𝑚(𝑡0)𝐻𝑧𝑓(𝑡0) .
(33)
The first equation of (12) is simplified as
𝑑𝐻𝑧𝑓
𝑑𝑡
=1
𝑉𝑧𝑓𝜌𝑧𝑓
(𝑄𝑧𝑓𝑓
−𝐷𝑧𝑓
𝜇𝑧𝑓
) + (1
𝜇𝑧𝑓
+ 𝐻𝑠𝑚)
𝐷𝑠𝑚
𝑉𝑧𝑓𝜌𝑧𝑓
− (𝐻𝑧𝑓(𝑡0)𝐷𝑠𝑚(𝑡) + 𝐻
𝑧𝑓(𝑡) 𝐷𝑠𝑚(𝑡0)
−𝐷𝑠𝑚(𝑡0)𝐻𝑧𝑓(𝑡0)) × (𝑉
𝑧𝑓𝜌𝑧𝑓)−1
.
(34)
Assuming that𝐻𝑧𝑓(𝑡) and𝐷
𝑠𝑚(𝑡) are variables which are only
related to time 𝑡, (34) after Laplace transform is
𝑠𝐻𝑧𝑓(𝑠) =
1
𝑠(
1
𝑉𝑧𝑓𝜌𝑧𝑓
(𝑄𝑧𝑓𝑓
−𝐷𝑧𝑓
𝜇𝑧𝑓
) +𝐷𝑠𝑚(𝑡0)𝐻𝑧𝑓(𝑡0)
𝑉𝑧𝑓𝜌𝑧𝑓
)
+ ((1/𝜇𝑧𝑓) + 𝐻
𝑠𝑚− 𝐻𝑧𝑓(𝑡0)
𝑉𝑧𝑓𝜌𝑧𝑓
)𝐷𝑠𝑚(𝑠)
−𝐻𝑧𝑓(𝑠)𝐷𝑠𝑚(𝑠)
𝑉𝑧𝑓𝜌𝑧𝑓
.
(35)
The second equation of (12) after Laplace transform isexpressed as
𝑠𝐻𝑓𝑙(𝑠) =
𝐷𝑧𝑓(𝐻𝑧𝑓(𝑠) − 𝐻
𝑓𝑙(𝑠))
𝑉𝑓𝑙𝜌𝑓𝑙
−𝑄𝑓𝑙
𝑉𝑓𝑙𝜌𝑓𝑙𝑠. (36)
The relationship between the intermediate point enthalpy andthe feed-water flow is obtained as
𝐻𝑓𝑙(𝑠) =
𝐷𝑧𝑓/𝑉𝑓𝑙𝜌𝑓𝑙
(𝑠 + (𝐷𝑧𝑓/𝑉𝑓𝑙𝜌𝑓𝑙)) (𝑠 + (𝐷
𝑠𝑚(𝑡0) /𝑉𝑧𝑓𝜌𝑧𝑓))
× [1
𝑠(
1
𝑉𝑧𝑓𝜌𝑧𝑓
(𝑄𝑧𝑓𝑓
−𝐷𝑧𝑓
𝜇𝑧𝑓
)
+𝐷𝑠𝑚(𝑡0) (𝐻𝑧𝑓(𝑡0) − (𝑄
𝑓𝑙/𝐷𝑧𝑓))
𝑉𝑧𝑓𝜌𝑧𝑓
−𝑄𝑓𝑙
𝐷𝑧𝑓
𝑠)
−((1/𝜇𝑧𝑓) + 𝐻
𝑠𝑚− 𝐻𝑧𝑓(𝑡0)
𝑉𝑧𝑓𝜌𝑧𝑓
)𝐷𝑠𝑚(𝑠)] .
(37)
The enthalpy can be obtained by using (24). Here is thelist of the parameters for a 600MW supercritical unit (boilertype: SG1913/25.40-MXXX). 𝑇
𝑧𝑓= 623.15 K, 𝑃
𝑧𝑓= 28Mpa,
𝐻𝑧𝑓= 2132.07 kJ/kg,𝑇
𝑠𝑚= 611.15 K,𝑃
𝑠𝑚= 29.83Mpa, and𝐻
𝑠𝑚
= 1863.29 kJ/kg.The initial feed-water flow at the outlet of the coal
economizer is 𝐷𝑠𝑚(𝑡0) = 485.53 kg/s. Therefore, after 𝑥
2(𝑠)

10 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
0 50 100 150 200
Hfl(kJ/k
g)
t (s)
(a) 100%
0
500
1000
1500
2000
2500
3000
3500
0 50 100 150 200
Hfl(kJ/k
g)
t (s)
(b) 90%
0
500
1000
1500
2000
2500
3000
3500
0 50 100 150 200
Hfl(kJ/k
g)
t (s)
(c) 80%
0
500
1000
1500
2000
2500
3000
3500
0 50 100 150 200
Hfl(kJ/k
g)
t (s)
(d) 70%
0 50 100 150 2000
500
1000
1500
2000
2500
3000
3500
4000
Hfl(kJ/k
g)
t (s)
(e) 60%
0
500
1000
1500
2000
2500
3000
3500
4000
0 50 100 150 200 250
Hfl(kJ/k
g)
t (s)
(f) 50%
0
500
1000
1500
2000
2500
3000
3500
4000
0 50 100 150 200 250
Hfl(kJ/k
g)
t (s)
(g) 40%
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
3500
4000
4500
Hfl(kJ/k
g)
t (s)
(h) 30%
Figure 8: Response on system of PID control on at different loads.

Mathematical Problems in Engineering 11
Table 3: Parameters𝐷𝑧𝑓
and𝐷𝑠𝑚
(𝑡0
) at different loads.
Load proportion 𝐷𝑧𝑓
(kg/s) 𝐷𝑠𝑚
(𝑡0
) (kg/s)100% 486 485.5390% 437.4 436.97780% 388.8 388.4270% 340.2 339.87160% 291.6 291.31850% 243 242.76540% 194.4 194.21230% 145.8 145.659
replacing 𝐻𝑓𝑙(𝑠) and 𝑢(𝑠) replacing 𝐷
𝑠𝑚(𝑠), (37) at full load
is simplified as
𝑥2(𝑠) =
0.77
(𝑠 + 0.06) (𝑠 + 0.77)
× [103.16 + 1639.7𝑠
0.77𝑠− 0.035𝑢 (𝑠)] ,
(38)
where (103.16+1639.7𝑠)/(0.77𝑠) is considered as disturbance.Therefore, the system structure diagram after PID control
of IPT is presented in Figure 5.
4.1.2. Simulationwith Feed-Water FlowDisturbance. To verifythe rationality of (38), the feed-water flow disturbance hasbeen adopted into the system and the performance has beenobserved. At 100% load, PID simulation is conducted withoutthe feed-water flow disturbance based on the system modelin Figure 5. The simulation performance is presented inFigure 6.
As shown in Figure 6, the system peak at 100% load is3186 kJ/kgwhichmeans the overshoot is 19.4%, the regulationtime is 40 s, and the steady-state output is 2666.98 kJ/kg.Then the noise signal is considered as the feed-water flowdisturbance and adopted into the controller output 𝑢 at 90 s.The simulation performance is presented in Figure 7.
As shown in Figure 7, sudden increase of feed-water flowcould reduce the intermediate point enthalpy. The resultthat the enthalpy of IPT recovers rapidly after disturbancemeans the phenomenon matches practical operation of the600MW supercritical unit. It is concluded that the modelof the transfer function on IPT in this paper is valid andreasonable.
4.1.3. Simulation at Different Loads. The PID control of IPTfor the 600MW supercritical unit has been simulated at dif-ferent loads. For example, at 100% load, the simulation resultwith the feed-water disturbance is presented in Figure 7.While keeping other parameters constant, different loadslead to different parameters𝐷
𝑧𝑓and𝐷
𝑠𝑚(𝑡0), respectively, in
Table 3.Then simulations are conducted after using the above
parameters into (37).Thenoise signal is also considered as thefeed-water flow disturbance and adopted into the controller
output 𝑢 at 90 s (it is 140 s, 150 s, and 200 s corresponding to50%, 40%, 30% load).The performances at different loads arepresented in Figure 8.
As shown in Figure 8, the results such as the overshoot𝑀𝐷, the regulation time 𝑡
𝑠, and the enthalpy difference
𝜎𝐻
at different loads are recorded in Table 4. (𝑡𝑠1: before
increasing feed-water flow disturbance. 𝑡𝑠2: after increasing
disturbance.)
4.2. Stability Analysis Contrast PID with Control via AffineNonlinear System. Two methods include control based onexact feedback linearization via affine nonlinear systemand PID control has been adopted to control the IPT ofthe 600MW supercritical unit. From Tables 2 and 4, thefollowing conclusions can be made. (1) When the controlvia affine nonlinear system is adopted at different loads, theovershoot is smaller, the regulation time is shorter, and theenthalpy difference can be controlled into a smaller range.The new proposed method can meet the unit’s requirementsbetter comparing with the PID. (2) When PID control isadopted at different loads, the performances are less effectiveas the overshoot is bigger and the regulation time is longer.
5. Conclusion
In this paper, the affine nonlinear model of IPT for thesupercritical boiler unit has been established. The optimalcontrol method based on exact feedback linearization hasbeen adopted into system with the feed-water flow distur-bance at different loads. To verify the validation of the newmethod, PID control simulation is also conducted for thecomparison.The control via affine nonlinear system based onexact feedback linearization can bemore effectively on IPT. Itis seen that the overshoot is smaller and the regulation time isshorterwhich shows it canmeet the unit’s requirements betterat different loads.
The future plans for control of IPT have been proposed asfollows.
(1) More accurate models for the supercritical once-through boiler generation units should be established.Under practical operation, the models must be morecomplicated andmore precise with high nonlinearity.
(2) More parameters changes should be considered. Inthis paper only the relationship between the feed-water flow and the IPT is focused on. More changingparameters should be studied in control of IPT infuture.
(3) More control methods such as Robust Control [39]should be compared with the control via affine non-linear system. In this paper only the PID controlwhich is widely used on practical power plant controlis compared with the new method. Future works willdeal with IPT by considering the Robust Control.

12 Mathematical Problems in Engineering
Table 4: Traditional PID control performance.
Load proportion 𝑅𝑠
= 2666.89 kJ/kg With feed-water flow𝐷𝑧𝑓
(kg/s) 𝑀𝐷
(%) 𝑡𝑠1
(s) 𝜎𝐻
(kJ/kg) 𝑡𝑠2
(s)100% 486 19.4 40 −29 2090% 437.4 21.8 40 −30 2080% 388.8 25.3 40 −31 2070% 340.2 29 50 −34 3060% 291.6 32.8 55 −37.4 3050% 243 39.7 76 −36.9 3540% 194.4 46.3 84 −39 4030% 145.8 58.7 133 −40.4 45
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper.
Acknowledgments
The work was supported partly by the National Key Tech-nology R&D Program of China 2013BAA01B01, the NationalNatural Science Foundation of China under Grants nos.61374064 and 61304152, and the China Postdoctoral ScienceFoundation Funded Project 2012M511258 and 2013T60738.
References
[1] T. Inoue, H. Taniguchi, Y. I. T. Inoue, and H. Taniguchi, “Amodel of fossil fueled plant with once-through boiler for powersystem frequency simulation studies,” IEEE Transactions onPower Systems, vol. 15, no. 4, pp. 1322–1328, 2000.
[2] C. P. Bechlioulis andG. A. Rovithakis, “Prescribed performanceadaptive control for multi-input multi-output affine in thecontrol nonlinear systems,” IEEE Transactions on AutomaticControl, vol. 55, no. 5, pp. 1220–1226, 2010.
[3] N. Sharma, S. Bhasin, Q. Wang, and W. E. Dixon, “RISE-basedadaptive control of a control affine uncertain nonlinear systemwith unknown state delays,” IEEE Transactions on AutomaticControl, vol. 57, no. 1, pp. 255–259, 2012.
[4] U. Moon and K. Y. Lee, “An adaptive dynamic matrix controlwith fuzzy-interpolated step-response model for a DRUM-typeboiler-turbine system,” IEEE Transactions on Energy Conver-sion, vol. 26, no. 2, pp. 393–401, 2011.
[5] R. Garduno-Ramirez and K. Y. Lee, “Wide range operation ofa power unit via feedforward fuzzy control,” IEEE Transactionson Energy Conversion, vol. 15, no. 4, pp. 421–426, 2000.
[6] X. Liu and C. W. Chan, “Neuro-fuzzy generalized predictivecontrol of boiler steam temperature,” IEEE Transactions onEnergy Conversion, vol. 21, no. 4, pp. 900–908, 2006.
[7] A. Zdesar, O. Cerman, D. Dovzan, P. Husek, and I. Skrjanc,“Fuzzy Control of a Helio-Crane—Comparison of Two ControlApproaches,” Journal of Intelligent and Robotic Systems: Theoryand Applications, vol. 72, no. 3-4, pp. 497–515, 2013.
[8] X. J. Liu, X. B. Kong, G. L. Hou, and J. H. Wang, “Modelingof a 1000MW power plant ultra super-critical boiler systemusing fuzzy-neural network methods,” Energy Conversion andManagement, vol. 65, pp. 518–527, 2013.
[9] S. Lu and B. W. Hogg, “Dynamic nonlinear modelling of powerplant by physical principles and neural networks,” InternationalJournal of Electrical Power and Energy System, vol. 22, no. 1, pp.67–78, 2000.
[10] H. Zhang, Y. Luo, and D. Liu, “Neural-network-based near-optimal control for a class of discrete-time affine nonlinearsystems with control constraints,” IEEE Transactions on NeuralNetworks, vol. 20, no. 9, pp. 1490–1503, 2009.
[11] X. Wu, J. Shen, Y. Li, and K. Y. Lee, “Data-driven modeling andpredictive control for boiler-turbine unit,” IEEE Transactions onEnergy Conversion, vol. 28, no. 3, pp. 470–481, 2013.
[12] H. Peng, T. Ozaki, V. Haggan-Ozaki, and Y. Toyoda, “A non-linear exponential ARXmodel-based multivariable generalizedpredictive control strategy for thermal power plants,” IEEETransactions on Control Systems Technology, vol. 10, no. 2, pp.256–262, 2002.
[13] E. Gallestey, A. Stothert, M. Antoine, and S. Morton, “Modelpredictive control and the optimization of power plant loadwhile considering lifetime consumption,” IEEE Transactions onPower Systems, vol. 17, no. 1, pp. 186–191, 2002.
[14] Y. Wang and X. Yu, “New coordinated control design forthermal-power-generation units,” IEEE Transactions on Indus-trial Electronics, vol. 57, no. 11, pp. 3848–3856, 2010.
[15] K. J. Astrom and R. D. Bell, “Drum-boiler dynamics,” Automat-ica, vol. 36, no. 3, pp. 363–378, 2000.
[16] S. Li, H. Liu, W. J. Cai, Y. C. Soh, and L. H. Xie, “A new coor-dinated control strategy for boiler-turbine system of coal-firedpower plant,” IEEE Transactions on Control Systems Technology,vol. 13, no. 6, pp. 943–954, 2005.
[17] I. Kocaarslan, E. Cam, and H. Tiryaki, “A fuzzy logic controllerapplication for thermal power plants,” Energy Conversion andManagement, vol. 47, no. 4, pp. 442–458, 2006.
[18] I. Kocaarslan and E. Cam, “An adaptive control application ina large thermal combined power plant,” Energy Conversion andManagement, vol. 48, no. 1, pp. 174–183, 2007.
[19] U. Moon and K. Y. Lee, “A boiler-turbine system control using afuzzy auto-regressive moving average (FARMA) model,” IEEETransactions on Energy Conversion, vol. 18, no. 1, pp. 142–148,2003.
[20] U. Moon and K. Y. Lee, “Step-response model development fordynamic matrix control of a drum-type boiler-turbine system,”IEEE Transactions on Energy Conversion, vol. 24, no. 2, pp. 423–430, 2009.
[21] A. Sode-Yome, N. Mithulananthan, and K. Y. Lee, “Amaximumloading margin method for static voltage stability in powersystems,” IEEE Transactions on Power Systems, vol. 21, no. 2, pp.799–808, 2006.

Mathematical Problems in Engineering 13
[22] K. Y. Lee, J. H. Van Sickel, J. A. Hoffman, W. Jung, andS. Kim, “Controller design for a large-scale ultrasupercriticalonce-through boiler power plant,” IEEE Transactions on EnergyConversion, vol. 25, no. 4, pp. 1063–1070, 2010.
[23] Q. Yang and S. Jagannathan, “Reinforcement learning controllerdesign for affine nonlinear discrete-time systems using onlineapproximators,” IEEE Transactions on Systems,Man, and Cyber-netics B: Cybernetics, vol. 42, no. 2, pp. 377–390, 2012.
[24] M. Benosman and K.-. Lum, “Passive actuators’ fault-tolerantcontrol for affine nonlinear systems,” IEEE Transactions onControl Systems Technology, vol. 18, no. 1, pp. 152–163, 2010.
[25] T. Ahmed-Ali, V. van Assche, J. Massieu, and P. Dorleans,“Continuous-discrete observer for state affine systems withsampled and delayed measurements,” IEEE Transactions onAutomatic Control, vol. 58, no. 4, pp. 1085–1091, 2013.
[26] Y. Yang and J. M. Lee, “Design of robust control Lyapunovfunction for non-linear affine systems with uncertainty,” IETControl Theory & Applications, vol. 6, no. 14, pp. 2248–2256,2012.
[27] H. Deng, H. Li, and Y.Wu, “Feedback-linearization-based neu-ral adaptive control for unknown nonaffine nonlinear discrete-time systems,” IEEE Transactions on Neural Networks, vol. 19,no. 9, pp. 1615–1625, 2008.
[28] F. Leonard, A.Martini, andG.Abba, “Robust nonlinear controlsof model-scale helicopters under lateral and vertical windgusts,” IEEETransactions onControl Systems Technology, vol. 20,no. 1, pp. 154–163, 2012.
[29] Q. Lu, S. Mei, W. Hu, F. F. Wu, Y. Ni, and T. Shen, “Nonlineardecentralized disturbance attenuation excitation control vianew recursive design for multi-machine power systems,” IEEETransactions on Power Systems, vol. 16, no. 4, pp. 729–736, 2001.
[30] T.-L. Chien, C.-C. Chen, and C.-J. Huang, “Feedback lineariza-tion control and its application to MIMO cancer immunother-apy,” IEEE Transactions on Control Systems Technology, vol. 18,no. 4, pp. 953–961, 2010.
[31] E. Semsar-Kazerooni, M. J. Yazdanpanah, and C. Lucas, “Non-linear control and disturbance decoupling of HVAC systemsusing feedback linearization and backstepping with load esti-mation,” IEEE Transactions on Control Systems Technology, vol.16, no. 5, pp. 918–929, 2008.
[32] K. Fregene and D. Kennedy, “Stabilizing control of a high-order generatormodel by adaptive feedback linearization,” IEEETransactions on Energy Conversion, vol. 18, no. 1, pp. 149–156,2003.
[33] A. Kusiak and Z. Song, “Clustering-based performance opti-mization of the boiler-turbine system,” IEEE Transactions onEnergy Conversion, vol. 23, no. 2, pp. 651–658, 2008.
[34] F. Casella, “Modeling, simulation, control, and optimizationof a geothermal power plant,” IEEE Transactions on EnergyConversion, vol. 19, no. 1, pp. 170–178, 2004.
[35] S. Barsali, A. de Marco, G. M. Giannuzzi, F. Mazzoldi, A.Possenti, and R. Zaottini, “Modeling combined cycle powerplants for power system restoration studies,” IEEE Transactionson Energy Conversion, vol. 27, no. 2, pp. 340–350, 2012.
[36] X. Liu and Z. Lin, “On normal forms of nonlinear systems affinein control,” IEEE Transactions on Automatic Control, vol. 56, no.2, pp. 239–253, 2011.
[37] N. Nakamura, H. Nakamura, and H. Nishitani, “Global inverseoptimal control with guaranteed convergence rates of inputaffine nonlinear systems,” IEEE Transactions on AutomaticControl, vol. 56, no. 2, pp. 358–369, 2011.
[38] Y. Yang and J. M. Lee, “Design of robust control Lyapunovfunction for non-linear affine systems with uncertainty,” IETControl Theory and Applications, vol. 6, no. 14, pp. 2248–2256,2012.
[39] D. Dovzan and I. Skrjanc, “Control of mineral wool thicknessusing predictive functional control,” Robotics and Computer-Integrated Manufacturing, vol. 28, no. 3, pp. 344–350, 2012.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of