Research Article Switching Fuzzy Guaranteed Cost Control...
13
Research Article Switching Fuzzy Guaranteed Cost Control for Nonlinear Networked Control Systems Linqin Cai, 1,2 Zhuo Yang, 2 Jimin Yu, 2 and Zhenhua Zhang 2 1 Key Laboratory of Industrial Internet of ings & Networked Control, Ministry of Education, Chongqing University of Posts and Telecommunications, Chongqing 400065, China 2 Research Center on Complex System Analysis and Control, Chongqing University of Posts and Telecommunications, Chongqing 400065, China Correspondence should be addressed to Linqin Cai; [email protected] Received 17 August 2013; Accepted 21 November 2013; Published 9 February 2014 Academic Editor: Bo-Chao Zheng Copyright © 2014 Linqin Cai et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. is paper deals with the problem of guaranteed cost control for a class of nonlinear networked control systems (NCSs) with time-varying delay. A guaranteed cost controller design method is proposed to achieve the desired control performance based on the switched T-S fuzzy model. e switching mechanism is introduced to handle the uncertainties of NCSs. Based on Lyapunov functional approach, some sufficient conditions for the existence of state feedback robust guaranteed cost controller are presented. Simulation results show that the proposed method is effective to guarantee system’s global asymptotic stability and quality of service (QoS). 1. Introduction As network technology advanced in the last decade, net- worked control system (NCS) has increasingly become a research focus. Considerable attention on the modeling and controller design of NCSs has been paid in [1–5]. ere are many advantages to NCSs, such as reduced system wiring, facilitated system maintenance, and increased systems flex- ibility. However, due to the insertion of communication chan- nels, this brings many challenging problems such as network- induced delay and data packet dropout. Regardless of the type of network used, these special issues degrade the system dynamic performance and are a source of potential instability. ere are a number of design methods that have been proposed to deal with these problems. One of the most general methods is to model the NCS as a system with time- varying delays. So the stability of an NCS is equivalent to the stability of a system with time-varying delays [2]. Moreover, the sampling behavior has also an important impact on the design of the NCS controller because the states of the feedback controller are not continuous as a result of the existence of zeroth-order hold (ZOH). In [1], a model of NCS was provided considering network-induced delay and packet dropout in the transmission. In [3], an observer-based stabilizing controller was designed for the NCSs involving both random measurement and actuation delays. Robust controllers for uncertain NCSs were also obtained in [4, 5]. However, how to analyze the stability of nonlinear NCSs has increasingly become a challenging topic. Some results about the stability of nonlinear NCSs were obtained in [6, 7]. In [8], a stochastic optimal controller design for nonlinear NCSs with uncertain dynamics via neurodynamic programming was proposed. e closed-loop stability of the nonlinear NCSs was demonstrated by selecting neural network (NN) update laws. However, these methods oſten require some strict assumptions for a system model, so it is difficult for practical applications. In the last few years, the fuzzy control is a useful approach to solve the control problems of nonlinear systems. e Takagi-Sugeno (T-S) fuzzy system proposed in [9] is widely applied to industrial control fields because of its simple structure with local dynamics. In the T-S fuzzy model, local dynamics in different state-space regions are represented by many linear models so that linear system theory can conve- niently be employed to analyze the stability of overall closed- loop system and to design the feedback controller. e typical design approaches are carried out based on fuzzy model Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2014, Article ID 539617, 12 pages http://dx.doi.org/10.1155/2014/539617
Transcript of Research Article Switching Fuzzy Guaranteed Cost Control...

Research ArticleSwitching Fuzzy Guaranteed Cost Control forNonlinear Networked Control Systems
Linqin Cai,1,2 Zhuo Yang,2 Jimin Yu,2 and Zhenhua Zhang2
1 Key Laboratory of Industrial Internet of Things & Networked Control, Ministry of Education,Chongqing University of Posts and Telecommunications, Chongqing 400065, China
2 Research Center on Complex System Analysis and Control, Chongqing University of Posts and Telecommunications,Chongqing 400065, China
Correspondence should be addressed to Linqin Cai; [email protected]
Received 17 August 2013; Accepted 21 November 2013; Published 9 February 2014
Academic Editor: Bo-Chao Zheng
Copyright © 2014 Linqin Cai et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This paper deals with the problem of guaranteed cost control for a class of nonlinear networked control systems (NCSs) withtime-varying delay. A guaranteed cost controller design method is proposed to achieve the desired control performance based onthe switched T-S fuzzy model. The switching mechanism is introduced to handle the uncertainties of NCSs. Based on Lyapunovfunctional approach, some sufficient conditions for the existence of state feedback robust guaranteed cost controller are presented.Simulation results show that the proposedmethod is effective to guarantee system’s global asymptotic stability and quality of service(QoS).
1. Introduction
As network technology advanced in the last decade, net-worked control system (NCS) has increasingly become aresearch focus. Considerable attention on the modeling andcontroller design of NCSs has been paid in [1–5]. There aremany advantages to NCSs, such as reduced system wiring,facilitated system maintenance, and increased systems flex-ibility.
However, due to the insertion of communication chan-nels, this bringsmany challenging problems such as network-induced delay and data packet dropout. Regardless of thetype of network used, these special issues degrade the systemdynamic performance and are a source of potential instability.There are a number of design methods that have beenproposed to deal with these problems. One of the mostgeneral methods is to model the NCS as a system with time-varying delays. So the stability of an NCS is equivalent to thestability of a system with time-varying delays [2]. Moreover,the sampling behavior has also an important impact onthe design of the NCS controller because the states of thefeedback controller are not continuous as a result of theexistence of zeroth-order hold (ZOH). In [1], a model ofNCS was provided considering network-induced delay and
packet dropout in the transmission. In [3], an observer-basedstabilizing controller was designed for the NCSs involvingboth random measurement and actuation delays. Robustcontrollers for uncertain NCSs were also obtained in [4, 5].However, how to analyze the stability of nonlinear NCSs hasincreasingly become a challenging topic. Some results aboutthe stability of nonlinear NCSs were obtained in [6, 7]. In[8], a stochastic optimal controller design for nonlinear NCSswith uncertain dynamics via neurodynamic programmingwas proposed. The closed-loop stability of the nonlinearNCSs was demonstrated by selecting neural network (NN)update laws. However, these methods often require somestrict assumptions for a system model, so it is difficult forpractical applications.
In the last few years, the fuzzy control is a useful approachto solve the control problems of nonlinear systems. TheTakagi-Sugeno (T-S) fuzzy system proposed in [9] is widelyapplied to industrial control fields because of its simplestructure with local dynamics. In the T-S fuzzy model, localdynamics in different state-space regions are represented bymany linear models so that linear system theory can conve-niently be employed to analyze the stability of overall closed-loop system and to design the feedback controller.The typicaldesign approaches are carried out based on fuzzy model
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014, Article ID 539617, 12 pageshttp://dx.doi.org/10.1155/2014/539617

2 Mathematical Problems in Engineering
via the so-called parallel distributed compensation (PDC)method [10]. Considering the time-delay characteristic ofnonlinear systems, many results about the T-S fuzzy modelwith a time-delay term are obtained to deal with stability andstabilization problems of nonlinear systems with time delays[2, 11–13]. The guaranteed cost control for a T-S fuzzy systemwith time delays was presented in [2, 11, 12]. In [13], robustcontrol problem was studied for a class of large-scale NCSs,and the decentralized design was presented using T-S fuzzyapproach.
Nevertheless, an inherent drawback remains since thenumber of fuzzy rules of a T-S model increases exponentiallywith the number of nonlinearities constituting the matchednonlinear system [14].Thismakes fuzzy controller design andimplementation difficult as the complexity of the nonlinearsystem to be controlled increases [15]. To outline the problemof rules explosion in fuzzy T-S modeling, some authors haveproposed to combine the merit of switched systems with T-Sones to deal with nonlinear control problems [16–18]. To doso, partitioning the state space of a nonlinear system allowsdefining a switched nonlinear system. Then, inside eachpartition, a T-S model can be obtained. As stated in [18], theresulting switched T-S system inherits some essential featuresof hybrid systems and maintains all the information andknowledge representation capacity of fuzzy systems. How-ever, few papers have studied stabilization issues of switchedfuzzy systems based on switching Lyapunov functions [16] orquadratic approaches [17]. In [19], based on barrier Lyapunovfunctions (BLFs), a new control design for constrained non-linear switched systems was investigated to achieve outputtracking. By ensuring the boundedness of the BLFs in theclosed loop, the proposed approaches can guarantee that allstates in the switched systems do not violate the desiredconstraints and that all closed-loop signals are bounded. Formany nonlinear systems, some of the premise variables of thecorresponding T-S fuzzy models are measurable when theyaremodeled as T-S fuzzymodels, while the partswith unmea-surable premise variables can be modeled as uncertainties.Thus, the overall systems can be described by T-S fuzzy partswith measurable premise variables and uncertainty parts. In[20], a switching stabilizing controller is designed for a non-linear system with unknown parameters or unmeasurablepremise variables. However, the uncertainties cannot be wellhandled. In [21], a switching fuzzy dynamic output feedbackcontrol scheme is proposed, where the switching mechanismis introduced to handle the unknown parameters.
In designing a controller for a real plant, it is invariablynecessary to design a control system which not only is stablebut also possesses a strong robust performance. One wayto deal with this is the so-called guaranteed cost controlapproach [2].This addresses the robust performance problemandhas the advantage of providing anupper boundon a givenperformance index guaranteeing that system performancedegradation incurred by uncertainty is less than this bound.For the NCSs, the quality of service (QoS) is one of the mostimportant performance indexes.Therefore, it is vital to designa guaranteed cost controller such that the NCSs are stable aswell as satisfactory with the required QoS.
Actuators
Random delayand/or
packet lossNetwork
Plant Sensors
Controller
Random delayand/or
packet loss
u(t) x(t)
y(t)
Figure 1: A general NCS.
In this paper, we aim at the problem of guaranteedcost control for a class of uncertain nonlinear NCSs withtime delays. Considering the QoS of NCSs, we propose aguaranteed cost control scheme to achieve the desired controlperformance based on switched T-S fuzzy control method,where the switching mechanism is introduced to handlethe uncertainties. Moreover, the sufficient condition for theexistence of the robust guaranteed cost controller and thedesign method of the corresponding switching control laware obtained via Lyapunov functions. Comparing with [2,11, 12], the proposed switching fuzzy approach inherits someessential features of hybrid systems to deal with the uncertainnonlinear NCSs and avoids the inherent drawback of rulesexplosion in modeling a fuzzy T-S model. In addition, weconsider the stabilization problem of the switched fuzzy T-Ssystem with time delays in NCSs.
The innovations of this paper are as follows: (1) theguaranteed cost controller is proposed for nonlinear NCSswith time-varying delay to achieve the desired controlperformance based on the switched T-S fuzzy model withuncertain parameters, and (2) the sufficient condition for therobust guaranteed cost control law is presented to uncertainnonlinear NCSs.
The paper is organized as follows. The basic problem for-mulation of the nonlinear networked control system is givenin Section 2.The switching fuzzy controller via state feedbackis analyzed in Section 3. In Section 4, the sufficient stabilityconditions and guaranteed cost control law are discussedby Lyapunov functions. Section 5 provides simulation resultsto demonstrate the effectiveness of the proposed method.Finally, concluding remarks are given in Section 6.
2. Problem Formulation
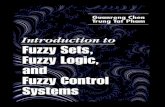
A general NCS configuration is illustrated in Figure 1, whichis composed of a controller and a remote system containinga physical plant, sensors, and actuators. The controller andthe plant are physically located at different locations and aredirectly linked by a data network in order to perform remoteclosed-loop control.
In Figure 1, the nonlinear networked control system canbe described as follows:
�� (𝑡) = 𝑓 (𝑥 (𝑡) , 𝑢 (𝑡)) ,
𝑦 (𝑡) = 𝑔 (𝑥 (𝑡) , 𝑢 (𝑡)) ,
(1)

Mathematical Problems in Engineering 3
where 𝑥(𝑡) ∈ 𝑅𝑛 is the state variation, 𝑢(𝑡) ∈ 𝑅𝑚 is the controlinput, 𝑦(𝑡) ∈ 𝑅
𝑠 is the regulated output, 𝑓(𝑥, 𝑢) and 𝑔(𝑥, 𝑢)are the nonlinear functions. Currently, it has been provedthat the T-S fuzzy models are universal approximations ofmany nonlinear dynamic systems. So we introduce a T-Sfuzzy system to model a class of nonlinear NCSs. Withoutconsidering the disturbance input, we use the following T-Sfuzzy model to approximate 𝑓(𝑥(𝑡), 𝑢(𝑡)) and 𝑔(𝑥(𝑡), 𝑢(𝑡)):
𝑅
𝑖: IF 𝜃
1(𝑡) is 𝑁
𝑖1, . . . , and 𝜃
𝑔(𝑡) is 𝑁
𝑖𝑔,
THEN{
�� (𝑡) = 𝐴
𝑖𝑥 (𝑡) + 𝐵
𝑖𝑢 (𝑡) ,
𝑦 (𝑡) = 𝐶
𝑖𝑥 (𝑡) ,
(2)
where 𝑖 = 1, 2, . . . , 𝑟 is the index number of fuzzy rules,𝜃
1(𝑡), 𝜃
2(𝑡), . . . , 𝜃
𝑔(𝑡) are the known premise variables, 𝑁
𝑖𝑘is
the fuzzy sets (𝑘 = 1, 2, . . . , 𝑔), 𝑥(𝑡) ∈ 𝑅
𝑛 is the state vector,𝑦(𝑡) ∈ 𝑅
𝑠 is the output vector, 𝑢(𝑡) ∈ 𝑅𝑚 is the control input,𝐴
𝑖∈ 𝑅
𝑛×𝑛 is known system matrices, 𝐵𝑖∈ 𝑅
𝑛×𝑚 is the inputmatrix, and 𝐶
𝑖∈ 𝑅
𝑛×𝑠 is the output matrix.Before designing the controller, we make the following
reasonable assumptions.
Assumption 1. The sensor is clock-driven. The controllerand actuator are event-driven. The clocks among them aresynchronized.
Assumption 2. Time-varying network-induced delay is lessthan one sampling period.
Assumption 3. The computational delay is negligible.
Assumption 4. The signal is single-packet transmission with-out packet drop.
Assuming the node sampling period is𝑇, sowe can obtainthe discrete T-S fuzzy model of nonlinear networked controlsystems with time-varying delay:
𝑅
𝑖: IF 𝜃
1(𝑘) is 𝑁
𝑖1, . . . , and 𝜃
𝑔(𝑘) is 𝑁
𝑖𝑔,
THEN{
{
{
{
{
{
{
{
{
𝑥 (𝑘 + 1)
= Φ
𝑖𝑥 (𝑘) + Γ
𝑖0(𝜏
𝑘) 𝑢 (𝑘)
+Γ
𝑖1(𝜏
𝑘) 𝑢 (𝑘 − 1) ,
𝑦 (𝑘) = 𝐶
𝑖𝑥 (𝑘) ,
(3)
where Φ
𝑖= 𝑒
𝐴𝑖𝑇, Γ𝑖0(𝜏
𝑘) = ∫
𝑇−𝜏𝑘
0
𝑒
𝐴𝑖𝑇
𝑑𝑡 ⋅ 𝐵
𝑖, Γ𝑖1(𝜏
𝑘) =
∫
𝑇
𝑇−𝜏𝑘
𝑒
𝐴𝑖𝑇
𝑑𝑡 ⋅ 𝐵
𝑖, and 𝜏
𝑘is the network-induced delay, 𝑖 =
0, 1, 2, . . . , 𝑟.Furthermore, (3) can be transformed into the following
form with uncertain parameters:
𝑥 (𝑘 + 1) = Φ
𝑖𝑥 (𝑘) + (Γ
𝑖0+ 𝐷
𝑖𝐹
𝑖(𝜏
𝑘) 𝐸
𝑖) 𝑢 (𝑘)
+ (Γ
𝑖1− 𝐷
𝑖𝐹
𝑖(𝜏
𝑘) 𝐸
𝑖) 𝑢 (𝑘 − 1) ,
𝑦 (𝑘) = 𝐶
𝑖𝑥 (𝑘) ,
(4)
where 𝐷
𝑖, 𝐸𝑖are known constant matrices of appropriate
dimensions and 𝐹𝑖is an unknown matrix function satisfying
𝐹
𝑇
𝐹 ≤ 𝐼,
Γ
𝑖0(𝜏
𝑘) = Γ
𝑖0+ 𝐷
𝑖𝐹
𝑖(𝜏
𝑘) 𝐸
𝑖,
Γ
𝑖1(𝜏
𝑘) = Γ
𝑖1− 𝐷
𝑖𝐹
𝑖(𝜏
𝑘) 𝐸
𝑖.
(5)
For any given 𝑥(𝑘) and 𝑢(𝑘), by using a weighted-averagedefuzzifier, product inference, and singleton fuzzifier, thelocal models can be integrated into a global nonlinear model:
𝑥 (𝑘 + 1) =
𝑟
∑
𝑖=1
𝜇
𝑖(𝜃 (𝑘)) [Φ
𝑖𝑥 (𝑘) + Γ
𝑖0(𝜏
𝑘) 𝑢 (𝑘)
+ Γ
𝑖1(𝜏
𝑘) 𝑢 (𝑘 − 1)] ,
𝑦 (𝑘) = 𝐶
𝑖𝑥 (𝑘) ,
(6)
where
𝜃 (𝑘) = [𝜃
𝑇
1(𝑘), 𝜃
𝑇
2(𝑘), . . . , 𝜃
𝑇
𝑔(𝑘)]
𝑇
,
𝜇
𝑖(𝜃 (𝑘)) =
∏
𝑔
𝑙=1𝑁
𝑖𝑙(𝑞
𝑙(𝑘))
∑
𝑟
𝑖=1∏
𝑔
𝑙=1𝑁
𝑖𝑙(𝜃
𝑙(𝑘))
.
(7)
𝑁
𝑖𝑙(𝜃
𝑙(𝑘)) is the grade of membership of 𝜃
𝑙(𝑘) in the fuzzy set
𝑁
𝑖𝑙. Notice the following facts:
𝜇
𝑖(𝜃 (𝑘)) ≥ 0,
𝑟
∑
𝑖=1
𝜇
𝑖(𝜃 (𝑘)) = 1. (8)
The guaranteed cost function associated with system (3)is given by
𝐽 =
∞
∑
𝑘=0
[𝑥
𝑇
(𝑘) 𝑄𝑥 (𝑘) + 𝑢
𝑇
𝜎(𝑘) 𝑅𝑢
𝜎(𝑘)] . (9)
Definition 5. Consider the uncertain system (3) and costfunction (9). If there exists a control law 𝑢
∗
𝜎(𝑘) and a positive
scalar 𝐽∗ such that for all admissible uncertainties, the closed-loop system is asymptotically stable and the value of the costfunction (9) satisfies 𝐽 ≤ 𝐽
∗, then 𝐽∗ is said to be a guaranteedcost and 𝑢∗
𝜎(𝑘) is said to be a guaranteed cost control law.
3. Controller Design
We assume that switched fuzzy controller is constituted with𝑁 switching rules. The 𝜎th subfuzzy controller is
𝑅
𝜎
𝑖: IF 𝜃
1(𝑡) is 𝑁
𝑖1, . . . , and 𝜃
𝑔(𝑡) is 𝑁
𝑖𝑔,
THEN 𝑢
𝜎(𝑘) = 𝐾
𝜎𝑖𝑥 (𝑘) ,
(10)
where 𝜎 = 1, 2, . . . , 𝑁 is a piecewise constant functionrepresenting the switching signal and 𝑅𝜎
𝑖represents 𝑖th fuzzy

4 Mathematical Problems in Engineering
rule of the 𝜎th subfuzzy controller.The switching control lawis constituted by the following fuzzy controller:
𝑢
1(𝑘) =
𝑟
∑
𝑖=1
𝜇
𝑖(𝜃 (𝑘))𝐾
1𝑖𝑥 (𝑘) ,
𝑢
2(𝑘) =
𝑟
∑
𝑖=1
𝜇
𝑖(𝜃 (𝑘))𝐾
2𝑖𝑥 (𝑘) ,
...
𝑢
𝑁(𝑘) =
𝑟
∑
𝑖=1
𝜇
𝑖(𝜃 (𝑘))𝐾
𝑁𝑖𝑥 (𝑘) .
(11)
When the controlled system is in 𝜎th switching subsys-tem, the global fuzzy equation is as follows
𝑥 (𝑘 + 1)
=
𝑟
∑
𝑖=1
𝜇
𝑖[Φ
𝑖𝑥 (𝑘) + Γ
𝑖0(𝜏
𝑘) 𝑢 (𝑘) + Γ
𝑖1(𝜏
𝑘) 𝑢 (𝑘 − 1)]
=
𝑟
∑
𝑖=1
𝜇
𝑖Φ
𝑖𝑥 (𝑘)
+
𝑟
∑
𝑖=1
𝑟
∑
𝑗=1
𝜇
𝑖𝜇
𝑗[Γ
𝑖0(𝜏
𝑘)𝐾
𝜎𝑗𝑥 (𝑘) + Γ
𝑖1(𝜏
𝑘)𝐾
𝜎𝑗𝑥 (𝑘 − 1)]
=
𝑟
∑
𝑖=1
𝑟
∑
𝑗=1
𝜇
𝑖𝜇
𝑗
× [Φ
𝑖𝑥 (𝑘) + Γ
𝑖0(𝜏
𝑘)𝐾
𝜎𝑗𝑥 (𝑘)
+ Γ
𝑖1(𝜏
𝑘)𝐾
𝜎𝑗𝑥 (𝑘 − 1)]
=
𝑟
∑
𝑖=1
𝑟
∑
𝑗=1
𝜇
𝑖𝜇
𝑗
× {[Φ
𝑖+ Γ
𝑖0(𝜏
𝑘)𝐾
𝜎𝑗] 𝑥 (𝑘)
+ Γ
𝑖1(𝜏
𝑘)𝐾
𝜎𝑗𝑥 (𝑘 − 1)}
=
𝑟
∑
𝑖=1
𝑟
∑
𝑗=1
𝜇
𝑖𝜇
𝑗{[Φ
𝑖+ (Γ
𝑖1− 𝐷
𝑖𝐹
𝑖(𝜏
𝑘) 𝐸
𝑖)𝐾
𝜎𝑗] 𝑥 (𝑘)
+ (Γ
𝑖1− 𝐷
𝑖𝐹
𝑖(𝜏
𝑘) 𝐸
𝑖)𝐾
𝜎𝑗𝑥 (𝑘 − 1)} .
(12)
LetΩ1, Ω
2, . . . , Ω
𝑁be a partition of the set𝑅𝑛; then⋃𝑁
𝑖=1Ω
𝑖=
𝑅
𝑛
\ {0}, Ω𝑖⋂Ω
𝑗= Φ, 𝑖 = 𝑗. The switching law that is
determined by Ω1, Ω
2, . . ., and Ω
𝑁is 𝜎 = 𝜎(𝑥(𝑡)) = 𝑖, when
𝑥(𝑡) ∈ Ω
𝑖. This switching law can be completely described by
the following function:
V𝜎(𝑥 (𝑡)) = {
1, 𝑥 (𝑡) ∈ Ω
𝜎,
0, 𝑥 (𝑡) ∉ Ω
𝜎,
𝜎 = 1, 2, . . . , 𝑁. (13)
Thus, we have
𝑥 (𝑘 + 1) =
𝑁
∑
𝜎=1
𝑟
∑
𝑖=1
𝑟
∑
𝑗=1
V𝜎𝜇
𝑖𝜇
𝑗
× {[Φ
𝑖+ (Γ
𝑖1− 𝐷
𝑖𝐹
𝑖(𝜏
𝑘) 𝐸
𝑖)𝐾
𝜎𝑗] 𝑥 (𝑘)
+ (Γ
𝑖1− 𝐷
𝑖𝐹
𝑖(𝜏
𝑘) 𝐸
𝑖)𝐾
𝜎𝑗𝑥 (𝑘 − 1)} ,
(14)
where 𝜏𝑘is the network-induced delay.
4. Sufficient Condition forGuaranteed Cost Control
Lemma 6 (see [22] (Schur complement)). For a given sym-metric matrix,
𝑆 = [
𝑆
11𝑆
12
𝑆
21𝑆
22
] . (15)
Then, the following three conditions are mutually equivalent:
(1) 𝑆 < 0,(2) 𝑆11< 0, 𝑆
22− 𝑆
𝑇
12𝑆
−1
11𝑆
12< 0,
(3) 𝑆22< 0, 𝑆
11− 𝑆
12𝑆
−1
22𝑆
𝑇
12< 0.
Lemma 7 (see [23]). Given matrices 𝑌, 𝐷, 𝐸, and 𝐼 of appro-priate dimensions and with 𝑌 and 𝐼 symmetrical and 𝐼 > 0,then
𝑌 + 𝐷𝐹𝐸 + 𝐸
𝑇
𝐹
𝑇
𝐷
𝑇
< 0 (16)
for all 𝐹 satisfying 𝐹𝑇𝐹 ≤ 𝐼, if and only if there exists some𝜀 > 0 such that
𝑌 + 𝜀
2
𝐷𝐷
𝑇
+ 𝜀
−2
𝐸
𝑇
𝐸 < 0. (17)
Theorem 8. Consider the uncertain nonlinear networkedcontrol systems (3) and the cost function (9). If there existsome constants 𝜆
𝜎∈ [0, 1], ∑𝑙
𝜎=1𝜆
𝜎= 1, a group of positive
constants 𝜀𝜎> 0, and positive definite matrices 𝑋, 𝑍, 𝑌
𝜎𝑖,
𝜎 = 1, . . . , 𝑙, 𝑖 = 1, . . . , 𝑟, such that the following matrixinequalities (18) hold:
𝑙
∑
𝜎=1
𝜆
𝜎
[
[
[
[
[
[
[
[
[
[
[
𝐿 𝑈 𝑉 0 0 0 0
∗ −2𝑋 + 2𝑍 0 2𝑋 (𝑌
𝜎𝑖+ 𝑌
𝜎𝑗)
𝑇
(𝐸
𝑖𝑌
𝜎𝑗)
𝑇
(𝐸
𝑗𝑌
𝜎𝑖)
𝑇
∗ ∗ −2𝑍 0 0 −(𝐸
𝑖𝑌
𝜎𝑗)
𝑇
−(𝐸
𝑗𝑌
𝜎𝑖)
𝑇
∗ ∗ ∗ −2𝑄
−1
0 0 0
∗ ∗ ∗ ∗ −2𝑅
−1
0 0
∗ ∗ ∗ ∗ ∗ −𝜀
𝜎𝐼 0
∗ ∗ ∗ ∗ ∗ ∗ −𝜀
𝜎𝐼
]
]
]
]
]
]
]
]
]
]
]
< 0,
1 ≤ 𝑖 ≤ 𝑗 ≤ 𝑟,
(18)

Mathematical Problems in Engineering 5
where
𝑋 = 𝑃
−1
, 𝑌
𝜎𝑖= 𝑘
𝜎𝑖𝑋,
𝑍 = 𝑋𝑆𝑋,
𝐿 = −2𝑋 + 𝜀
𝜎(𝐷
𝑖𝐷
𝑇
𝑖+ 𝐷
𝑗𝐷
𝑇
𝑗) ,
𝑈 = Φ
𝑖+ Φ
𝑗+ Γ
𝑖0𝑌
𝜎𝑗+ Γ
𝑗0𝑌
𝜎𝑖,
𝑉 = Γ
𝑖1𝑌
𝜎𝑗+ Γ
𝑗1𝑌
𝜎𝑖,
(19)
then close-loop system (14) with the guaranteed cost controller(11) and the switching law 𝜎 = 𝜎(𝑥(𝑘)) is globally asymp-totically stable. The guaranteed cost function (9) satisfies thefollowing bound:
𝐽 ≤ 𝑥
𝑇
(0) 𝑃𝑥 (0) + 𝑥
𝑇
(−1) 𝑆𝑥 (−1) .(20)
Proof. For the networked control system (3), we lead theperformance index as follows:
𝐽 =
∞
∑
𝑘=0
[𝑥
𝑇
(𝑘) 𝑄𝑥 (𝑘) + 𝑢
𝑇
𝜎(𝑘) 𝑅𝑢
𝜎(𝑘)]
=
∞
∑
𝑘=0
[
[
𝑟
∑
𝑖=1
𝑟
∑
𝑗=1
𝜇
𝑖𝜇
𝑗𝑥
𝑇
(𝑘) (𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑗) 𝑥 (𝑘)
]
]
=
∞
∑
𝑘=0
[
[
𝑟
∑
𝑖=1
𝜇
2
𝑖𝑥
𝑇
(𝑘) (𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑖) 𝑥 (𝑘)
+2
𝑟
∑
𝑖=1
𝑟
∑
𝑗>𝑖
𝜇
𝑖𝜇
𝑗𝑥
𝑇
(𝑘) (𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑗) 𝑥 (𝑘)
]
]
=
∞
∑
𝑘=0
[
[
𝑟
∑
𝑖=1
𝜇
2
𝑖𝑥
𝑇
(𝑘) (𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑖) 𝑥 (𝑘)
+ 2
𝑟
∑
𝑖=1
𝑟
∑
𝑗>𝑖
𝜇
𝑖𝜇
𝑗𝑥
𝑇
(𝑘)
×(𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
)𝑥 (𝑘)
]
]
.
(21)
Consider the Lyapunov function as
𝑉 (𝑥 (𝑘)) = 𝑥
𝑇
(𝑘) 𝑃𝑥 (𝑘)
+ 𝑥
𝑇
(𝑘 − 1) 𝑆𝑥 (𝑘 − 1) .
(22)
Let
Θ = [
𝐺
𝑇
𝜎𝑖𝑗𝑃𝐺
𝜎𝑛𝑚− 𝑃 + 𝑆 𝐺
𝑇
𝜎𝑖𝑗𝑃𝐻
𝜎𝑛𝑚
𝐻
𝑇
𝜎𝑖𝑗𝑃𝐺
𝜎𝑛𝑚𝐻
𝑇
𝜎𝑖𝑗𝑃𝐻
𝜎𝑛𝑚− 𝑆
] ,
𝐺
𝜎𝑖𝑗= Φ
𝑖+ Γ
𝑖0𝐾
𝜎𝑗+ 𝐷
𝑖𝐹
𝑖(𝜏
𝑘) 𝐸
𝑖𝐾
𝜎𝑗,
𝛼
𝜎𝑖𝑗= 𝐺
𝜎𝑖𝑗+ 𝐺
𝜎𝑗𝑖,
𝐻
𝜎𝑖𝑗= Γ
𝑖1𝐾
𝜎𝑗− 𝐷
𝑖𝐹
𝑖(𝜏
𝑘) 𝐸
𝑖𝐾
𝜎𝑗,
𝛽
𝜎𝑖𝑗= 𝐻
𝜎𝑖𝑗+ 𝐻
𝜎𝑗𝑖.
(23)
Along any trajectory of the closed-loop system (14), theforward difference of 𝑉(𝑘) is
Δ𝑉 (𝑥 (𝑘)) = 𝑉 (𝑥 (𝑘 + 1)) − 𝑉 (𝑥 (𝑘))
= 𝑥
𝑇
(𝑘 + 1) 𝑃𝑥 (𝑘 + 1) + 𝑥
𝑇
(𝑘) 𝑆𝑥 (𝑘) − 𝑥
𝑇
(𝑘) 𝑃𝑥 (𝑘) − 𝑥
𝑇
(𝑘 − 1) 𝑆𝑥 (𝑘 − 1)
=
𝑁
∑
𝜎=1
𝑟
∑
𝑖=1
𝑟
∑
𝑗=1
𝑟
∑
𝑛=1
𝑟
∑
𝑚=1
V𝜎𝜇
𝑖𝜇
𝑗𝜇
𝑛𝜇
𝑚[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
𝑇
Θ[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
≤
𝑁
∑
𝜎=1
V𝜎
{
{
{
1
4
𝑟
∑
𝑖=1
𝑟
∑
𝑗=1
𝜇
𝑖𝜇
𝑗[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
𝑇
[
𝛼
𝑇
𝜎𝑖𝑗𝑃𝛼
𝜎𝑖𝑗− 4𝑃 + 4𝑆 𝛼
𝑇
𝜎𝑖𝑗𝑃𝛽
𝜎𝑖𝑗
𝛽
𝑇
𝜎𝑖𝑗𝑃𝛼
𝜎𝑖𝑗𝛽
𝑇
𝜎𝑖𝑗𝑃𝛽
𝜎𝑖𝑗− 4𝑆
] [
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
}
}
}
=
𝑁
∑
𝜎=1
V𝜎
{
{
{
{
{
{
{
{
{
𝑟
∑
𝑖=1
𝜇
2
𝑖[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
𝑇
[
𝐺
𝑇
𝜎𝑖𝑖𝑃𝐺
𝜎𝑖𝑖− 𝑃 + 𝑆 𝐺
𝑇
𝜎𝑖𝑖𝑃𝐻
𝜎𝑖𝑖
𝐻
𝑇
𝜎𝑖𝑖𝑃𝐺
𝜎𝑖𝑖𝐻
𝑇
𝜎𝑖𝑖𝑃𝐻
𝜎𝑖𝑖− 𝑆
] [
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
+2
𝑟
∑
𝑖=1
𝑟
∑
𝑗>𝑖
𝜇
𝑖𝜇
𝑗[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
𝑇[
[
[
[
[
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛼
𝜎𝑖𝑗
2
− 𝑃 + 𝑆 [
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛽
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛼
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛽
𝜎𝑖𝑗
2
− 𝑆
]
]
]
]
]
[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
}
}
}
}
}
}
}
}
}
.
(24)

6 Mathematical Problems in Engineering
Thus
Δ𝑉 (𝑥 (𝑘)) + 𝑥
𝑇
(𝑘) 𝑄𝑥 (𝑘) + 𝑢
𝑇
𝜎(𝑘) 𝑅𝑢
𝜎(𝑘)
≤
𝑁
∑
𝜎=1
V𝜎
{
{
{
𝑟
∑
𝑖=1
𝜇
2
𝑖[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
𝑇
× [
𝐺
𝑇
𝜎𝑖𝑖𝑃𝐺
𝜎𝑖𝑖− 𝑃 + 𝑆 𝐺
𝑇
𝜎𝑖𝑖𝑃𝐻
𝜎𝑖𝑖
𝐻
𝑇
𝜎𝑖𝑖𝑃𝐺
𝜎𝑖𝑖𝐻
𝑇
𝜎𝑖𝑖𝑃𝐻
𝜎𝑖𝑖− 𝑆
] [
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
+ 2
𝑟
∑
𝑖=1
𝑟
∑
𝑗>𝑖
𝜇
𝑖𝜇
𝑗[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
𝑇 [
[
[
[
[
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛼
𝜎𝑖𝑗
2
− 𝑃 + 𝑆 [
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛽
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛼
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛽
𝜎𝑖𝑗
2
− 𝑆
]
]
]
]
]
[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
+
𝑟
∑
𝑖=1
𝜇
2
𝑖𝑥
𝑇
(𝑘) (𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑖) 𝑥 (𝑘)
+2
𝑟
∑
𝑖=1
𝑟
∑
𝑗>𝑖
𝜇
𝑖𝜇
𝑗𝑥
𝑇
(𝑘)(𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
)𝑥 (𝑘)
}
}
}
=
𝑁
∑
𝜎=1
V𝜎{
𝑟
∑
𝑖=1
𝜇
2
𝑖[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
𝑇
× [
𝐺
𝑇
𝜎𝑖𝑖𝑃𝐺
𝜎𝑖𝑖− 𝑃 + 𝑆 + 𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑖𝐺
𝑇
𝜎𝑖𝑖𝑃𝐻
𝜎𝑖𝑖
𝐻
𝑇
𝜎𝑖𝑖𝑃𝐺
𝜎𝑖𝑖𝐻
𝑇
𝜎𝑖𝑖𝑃𝐻
𝜎𝑖𝑖− 𝑆
] [
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
+ 2
𝑟
∑
𝑖=1
𝑟
∑
𝑗>𝑖
𝜇
𝑖𝜇
𝑗[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
𝑇
×
[
[
[
[
[
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛼
𝜎𝑖𝑗
2
− 𝑃 + 𝑆 + 𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛽
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛼
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛽
𝜎𝑖𝑗
2
− 𝑆
]
]
]
]
]
×[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]} .
(25)
Thus, if the matrix inequalities (26) and (27) hold
[
𝐺
𝑇
𝜎𝑖𝑖𝑃𝐺
𝜎𝑖𝑖− 𝑃 + 𝑆 + 𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑖𝐺
𝑇
𝜎𝑖𝑖𝑃𝐻
𝜎𝑖𝑖
𝐻
𝑇
𝜎𝑖𝑖𝑃𝐺
𝜎𝑖𝑖𝐻
𝑇
𝜎𝑖𝑖𝑃𝐻
𝜎𝑖𝑖− 𝑆
] < 0, 1 ≤ 𝑖 ≤ 𝑟, (26)
[
[
[
[
[
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛼
𝜎𝑖𝑗
2
− 𝑃 + 𝑆 + 𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛽
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛼
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛽
𝜎𝑖𝑗
2
− 𝑆
]
]
]
]
]
< 0, 1 ≤ 𝑖 < 𝑗 ≤ 𝑟, (27)

Mathematical Problems in Engineering 7
then, the following inequality can hold:
Δ𝑉 (𝑥 (𝑘)) + 𝑥
𝑇
(𝑘) 𝑄𝑥 (𝑘) + 𝑢
𝑇
𝜎(𝑘) 𝑅𝑢
𝜎(𝑘) < 0, (28)
and (26) is the special case of (27) when 𝑖 = 𝑗. Thus, when(27) holds, the inequality (28) can hold. Consider
𝜃
𝜎𝑖𝑗=
[
[
[
[
[
[
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛼
𝜎𝑖𝑗
2
− 𝑃 + 𝑆 + 𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛽
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛼
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝛽
𝜎𝑖𝑗
2
− 𝑆
]
]
]
]
]
]
< 0,
1 ≤ 𝑖 ≤ 𝑗 ≤ 𝑟.
(29)
Let
Ω
𝜎𝑖𝑗= −4𝑃 + 4𝑆 + 4𝑄 + (𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
𝑅 (𝐾
𝜎𝑖+ 𝐾
𝜎𝑗) ,
𝜃
𝜎𝑖𝑗= [
Ω
𝜎𝑖𝑗+ 𝛼
𝑇
𝜎𝑖𝑖𝑃𝛼
𝜎𝑖𝑗𝛼
𝑇
𝜎𝑖𝑖𝑃𝛽
𝜎𝑖𝑗
𝛽
𝑇
𝜎𝑖𝑖𝑃𝛼
𝜎𝑖𝑗𝛽
𝑇
𝜎𝑖𝑖𝑃𝛽
𝜎𝑖𝑗− 4𝑆
] < 0,
1 ≤ 𝑖 ≤ 𝑗 ≤ 𝑟.
(30)
Therefore, according to the fact of 𝜇𝑖(𝜃(𝑘)) ≥ 0 in (8), the
inequality (30) and the equality (24), we can obtain Δ𝑉 < 0.
Define sets Ω𝜎
= {𝑦 ∈ 𝑅
2𝑛
: 𝑦
𝑇
𝜃
𝜎𝑖𝑗𝑦 < 0}; thus
∪Ω
𝑖= 𝑅
2𝑛
\ {0}. Construct the sets Ω1= Ω
1, . . . ,
Ω
𝜎=
Ω
𝜎− ⋃
𝜎−1
𝑖=1
Ω
𝑖, . . ..
Obviously, we have⋃𝑙𝑖=1
Ω
𝑖= 𝑅
2𝑛
\ {0}, Ω𝑖∩
Ω
𝑗= Φ, 𝑖 = 𝑗.
Construct a switching law as follows:𝜎 (𝑥 (𝑘)) = 𝑖, when 𝑥 (𝑘) ∈
Ω
𝑖, 𝜎 ∈ 𝑀. (31)
Thus, Δ𝑉(𝑥(𝑘)) + 𝑥𝑇(𝑘)𝑄𝑥(𝑘) + 𝑢𝑇𝜎(𝑘)𝑅𝑢
𝜎(𝑘) ≤ 𝜉
𝑇
(𝑘)𝜃
𝜎𝑖𝑗𝜉(𝑘)
< 0, ∀𝜉(𝑘) = 0, where 𝜉(𝑘) = [𝑥
𝑇
(𝑘) 𝑥
𝑇
(𝑘 − 1)]
𝑇.Notice that 𝐹𝑇𝐹 ≤ 𝐼. Applying Lemmas 6 and 7 to the
inequality (29), we have
[
[
[
[
[
[
[
[
[
[
[
Ψ Λ Π 0 0 0 0
∗ −2𝑃 + 2𝑆 0 2𝐼 (𝑘
𝜎𝑖+ 𝑘
𝜎𝑗)
𝑇
(𝐸
𝑖𝑘
𝜎𝑗)
𝑇
(𝐸
𝑗𝑘
𝜎𝑖)
𝑇
∗ ∗ −2𝑆 0 0 −(𝐸
𝑖𝑘
𝜎𝑗)
𝑇
(𝐸
𝑗𝑘
𝜎𝑖)
𝑇
∗ ∗ ∗ −2𝑄
−1
0 0 0
∗ ∗ ∗ ∗ −2𝑅
−1
0 0
∗ ∗ ∗ ∗ ∗ −𝜀
𝜎𝐼 0
∗ ∗ ∗ ∗ ∗ ∗ −𝜀
𝜎𝐼
]
]
]
]
]
]
]
]
]
]
]
< 0, (32)
whereΨ = −2𝑃
−1
+ 𝜀
𝜎(𝐷
𝑖𝐷
𝑇
𝑖+ 𝐷
𝑗𝐷
𝑇
𝑗) ,
Λ = Φ
𝑖+ Φ
𝑗+ Γ
𝑖0𝑘
𝜎𝑗+ Γ
𝑗0𝑘
𝜎𝑖,
Π = Γ
𝑖1𝑘
𝜎𝑗+ Γ
𝑗1𝑘
𝜎𝑖.
(33)
By inequality (32) left-multiplied and right-multiplied bydiag(𝐼 𝑃
−1
𝑃
−1
𝐼 𝐼 𝐼 𝐼) and defining new variables 𝑋 =
𝑃
−1, 𝑌𝜎𝑖= 𝑘
𝜎𝑖𝑋, and 𝑍 = 𝑋𝑆𝑋, we have
[
[
[
[
[
[
[
[
[
[
[
𝐿 𝑈 𝑉 0 0 0 0
∗ −2𝑋 + 2𝑍 0 2𝑋 (𝑌
𝜎𝑖+ 𝑌
𝜎𝑗)
𝑇
(𝐸
𝑖𝑌
𝜎𝑗)
𝑇
(𝐸
𝑗𝑌
𝜎𝑖)
𝑇
∗ ∗ −2𝑍 0 0 −(𝐸
𝑖𝑌
𝜎𝑗)
𝑇
(𝐸
𝑗𝑌
𝜎𝑖)
𝑇
∗ ∗ ∗ −2𝑄
−1
0 0 0
∗ ∗ ∗ ∗ −2𝑅
−1
0 0
∗ ∗ ∗ ∗ ∗ −𝜀
𝜎𝐼 0
∗ ∗ ∗ ∗ ∗ ∗ −𝜀
𝜎𝐼
]
]
]
]
]
]
]
]
]
]
]
< 0, (34)

8 Mathematical Problems in Engineering
where
𝐿 = −2𝑋 + 𝜀
𝜎(𝐷
𝑖𝐷
𝑇
𝑖+ 𝐷
𝑗𝐷
𝑇
𝑗) ,
𝑈 = Φ
𝑖+ Φ
𝑗+ Γ
𝑖0𝑌
𝜎𝑗+ Γ
𝑗0𝑌
𝜎𝑖,
𝑉 = Γ
𝑖1𝑌
𝜎𝑗+ Γ
𝑗1𝑌
𝜎𝑖.
(35)
Taking (28) into account, for all admissible uncertainties, wecan infer that as follows:
Δ𝑉 (𝑥 (𝑘)) ≤ −𝑥
𝑇
(𝑘) 𝑄𝑥 (𝑘) − 𝑢
𝑇
𝜎(𝑘) 𝑅𝑢
𝜎(𝑘) .
(36)
According to (18), we can infer that there exists at least one𝜎 such that (29) is established. Therefore, the closed-loopsystem (14) is asymptotically stable under the controller (11)and the switching law (31). Moreover, we have
Δ𝑉 <
𝑟
∑
𝑖=1
𝜇
2
𝑖𝑥
𝑇
(𝑘) (𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑖) 𝑥 (𝑘)
+ 2
𝑟
∑
𝑖=1
𝑟
∑
𝑗>𝑖
𝜇
𝑖𝜇
𝑗𝑥
𝑇
(𝑘)
× (𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
)𝑥 (𝑘) ,
(37)
thus𝑟
∑
𝑖=1
𝜇
2
𝑖𝑥
𝑇
(𝑘) (𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑖) 𝑥 (𝑘)
+ 2
𝑟
∑
𝑖=1
𝑟
∑
𝑗>𝑖
𝜇
𝑖𝜇
𝑗𝑥
𝑇
(𝑘)
× (𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
)𝑥 (𝑘) < −Δ𝑉.
(38)
The inequalities (38) are added up together in the case that 𝑘is 0, 1, 2, . . . ,∞; we have
𝐽 =
∞
∑
𝑘=0
[
[
𝑟
∑
𝑖=1
𝜇
2
𝑖𝑥
𝑇
(𝑘) (𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑖) 𝑥 (𝑘)
+ 2
𝑟
∑
𝑖=1
𝑟
∑
𝑗>𝑖
𝜇
𝑖𝜇
𝑗𝑥
𝑇
(𝑘)
×(𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
)𝑥 (𝑘)
]
]
≤ 𝑥
𝑇
(0) 𝑃𝑥 (0) + 𝑥
𝑇
(−1) 𝑆𝑥 (−1) .
(39)
Therefore, Theorem 8 is proved.Theorem 9. Consider the uncertain nonlinear networkedcontrol systems (3) and the cost function (9). If there exist somenonpositive or nonnegative constants 𝛿
𝜎𝜆(𝜎, 𝜆 = 1, 2, . . . , 𝑙),
a group of positive constants 𝜀𝜎
> 0, and positive-definitematrices 𝑋
𝜎, 𝑍𝜎, matrix 𝑌
𝜎𝑖, 𝜎 = 1, . . . , 𝑙, 𝑖 = 1, . . . , 𝑟, such
that the following matrix inequalities:
[
[
[
[
[
[
[
[
[
[
[
[
[
𝐿 𝑈 𝑉 0 0 0 0
∗ Ξ +
𝑙
∑
𝜆=1, 𝜆 = 𝜎
𝛿
𝜎𝜆(𝑋
𝜆− 𝑋
𝜎) 0 2𝑋 (𝑌
𝜎𝑖+ 𝑌
𝜎𝑗)
𝑇
(𝐸
𝑖𝑌
𝜎𝑗)
𝑇
(𝐸
𝑗𝑌
𝜎𝑖)
𝑇
∗ ∗ −2𝑍 0 0 −(𝐸
𝑖𝑌
𝜎𝑗)
𝑇
−(𝐸
𝑗𝑌
𝜎𝑖)
𝑇
∗ ∗ ∗ −2𝑄
−1
0 0 0
∗ ∗ ∗ ∗ −2𝑅
−1
0 0
∗ ∗ ∗ ∗ ∗ −𝜀
𝜎𝐼 0
∗ ∗ ∗ ∗ ∗ ∗ −𝜀
𝜎𝐼
]
]
]
]
]
]
]
]
]
]
]
]
]
< 0, 1 ≤ 𝑖 ≤ 𝑗 ≤ 𝑟, (40)
hold, where
Ξ = −2𝑋
𝜎+ 2𝑍
𝜎, 𝑋
𝜎= 𝑃
−1
𝜎,
𝑌
𝜎𝑖= 𝑘
𝜎𝑖𝑋
𝜎, 𝑍
𝜎= 𝑋
𝜎𝑆
𝜎𝑋
𝜎,
𝐿 = −2𝑋
𝜎+ 𝜀
𝜎(𝐷
𝑖𝐷
𝑇
𝑖+ 𝐷
𝑗𝐷
𝑇
𝑗) ,
𝑈 = Φ
𝑖+ Φ
𝑗+ Γ
𝑖0𝑌
𝜎𝑗+ Γ
𝑗0𝑌
𝜎𝑖,
𝑉 = Γ
𝑖1𝑌
𝜎𝑗+ Γ
𝑗1𝑌
𝜎𝑖,
(41)
then system (14) with the guaranteed cost controller (11) andthe switching law 𝜎 = 𝜎(𝑥(𝑘)) is globally asymptotically stable.The guaranteed cost function (9) satisfies the following bound:
𝐽 ≤ 𝑥
𝑇
(0) 𝑃
𝜎𝑥 (0) + 𝑥
𝑇
(−1) 𝑆
𝜎𝑥 (−1) .
(42)
Proof. By the Lemmas 6 and 7, and 𝑋𝜎= 𝑃
𝜎
−1, 𝑌𝜎𝑖= 𝑘
𝜎𝑖𝑋
𝜎,
𝑍
𝜎= 𝑋
𝜎𝑆
𝜎𝑋
𝜎, from (40), we have

Mathematical Problems in Engineering 9
[
[
[
[
[
[
[
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛼
𝜎𝑖𝑗
2
− 𝑃
𝜎+ 𝑆
𝜎+ 𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
+
𝑙
∑
𝜆=1,𝜆 = 𝜎
𝛿
𝜎𝜆(𝑃
𝜆− 𝑃
𝜎) [
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛽
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛼
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛽
𝜎𝑖𝑗
2
− 𝑆
𝜎
]
]
]
]
]
]
]
< 0.
(43)
Without loss of generality, we assume that 𝛿𝜎𝜆≥ 0.
Obviously, there exists at least one 𝜎 ∈ 𝑀 when 𝑥(𝑘) ∈
𝑅
𝑛
\ {0}, such that 𝑥𝑇(𝑘)(𝑃𝜆− 𝑃
𝜎)𝑥(𝑘) ≥ 0, ∀𝜆 ∈ 𝑀.
Let Ω𝜎= {𝑥(𝑘) ∈ 𝑅
𝑛
| 𝑥
𝑇
(𝑘)(𝑃
𝜆− 𝑃
𝜎)𝑥(𝑘) ≥ 0, ∀𝜆 ∈
𝑀, 𝜆 = 𝜎, 𝑥(𝑘) = 0}; thus ∪Ω𝑖= 𝑅
𝑛
\ {0}.Construct the sets Ω
1= Ω
1, . . . ,
Ω
𝜎= Ω
𝜎− ⋃
𝜎−1
𝑖=1
Ω
𝑖, . . ..
Obviously, we have⋃𝑙𝑖=1
Ω
𝑖= 𝑅
𝑛
\ {0}, Ω𝑖∩
Ω
𝑗= Φ, 𝑖 = 𝑗.
Construct a switched law by
𝜎 (𝑥 (𝑘)) = 𝑖, when 𝑥 (𝑘) ∈
Ω
𝑖, 𝜎 ∈ 𝑀. (44)
Thus, from (43), we have
[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
]
𝑇[
[
[
[
[
[
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛼
𝜎𝑖𝑗
2
− 𝑃
𝜎+ 𝑆
𝜎+ 𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛽
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛼
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛽
𝜎𝑖𝑗
2
− 𝑆
]
]
]
]
]
]
[
𝑥 (𝑘)
𝑥 (𝑘 − 1)
] < 0, 1 ≤ 𝑖 ≤ 𝑗 ≤ 𝑟.
(45)
Following the similar lines as in the proof of Theorem 8, wehave
𝜃
𝜎𝑖𝑗=
[
[
[
[
[
[
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛼
𝜎𝑖𝑗
2
− 𝑃
𝜎+ 𝑆
𝜎+ 𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
[
𝛼
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛽
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛼
𝜎𝑖𝑗
2
[
𝛽
𝜎𝑖𝑗
2
]
𝑇
𝑃
𝜎
𝛽
𝜎𝑖𝑗
2
− 𝑆
]
]
]
]
]
]
< 0,
1 ≤ 𝑖 ≤ 𝑗 ≤ 𝑟,
(46)
then, Δ𝑉𝜎(𝑥(𝑘)) + 𝑥
𝑇
(𝑘)𝑄𝑥(𝑘) + 𝑢
𝑇
𝜎(𝑘)𝑅𝑢
𝜎(𝑘) < 0. Thus,
𝑟
∑
𝑖=1
𝜇
2
𝑖𝑥
𝑇
(𝑘) (𝑄 + 𝐾
𝑇
𝜎𝑖𝑅𝐾
𝜎𝑖) 𝑥 (𝑘)
+ 2
𝑟
∑
𝑖=1
𝑟
∑
𝑗>𝑖
𝜇
𝑖𝜇
𝑗𝑥
𝑇
(𝑘)(𝑄 +
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
𝑇
2
𝑅
(𝐾
𝜎𝑖+ 𝐾
𝜎𝑗)
2
)𝑥 (𝑘)
< −Δ𝑉
𝜎.
(47)The above inequality (47) is added up together in the case that𝑘 is 0, 1, 2, . . . ,∞, according to the stability of the system,then
𝐽 ≤ 𝑥
𝑇
(0) 𝑃
𝜎𝑥 (0) + 𝑥
𝑇
(−1) 𝑆
𝜎𝑥 (−1) .
(48)
Theorem 9 is proved.
5. Simulation Example
Consider the nonlinear system with the following differentialequation [24]:
𝑠 (𝑡) + 𝑓 (𝑠 (𝑡) , 𝑠 (𝑡)) − 0.1𝑠 (𝑡) = 𝐹 (𝑡) , (49)
where 𝑓(𝑠(𝑡), 𝑠(𝑡)) = 0.5𝑠(𝑡) + 0.75 sin( 𝑠(𝑡)/0.5).

10 Mathematical Problems in Engineering
Choose the state variable and the input variable as 𝑥(𝑡) =[𝑠(𝑡), 𝑠(𝑡)]
𝑇, 𝑢(𝑡) = 𝐹(𝑡), respectively. It can be represented bythe following fuzzy model consisting of two rules:
𝑅
1: IF 𝑥
2(𝑡) is 𝑀
1,
THEN �� (𝑡) = 𝐴
1𝑥 (𝑡) + 𝐵
1𝑢 (𝑡) ,
𝑅
2: IF 𝑥
2(𝑡) is 𝑀
2,
THEN �� (𝑡) = 𝐴
2𝑥 (𝑡) + 𝐵
2𝑢 (𝑡) ,
(50)
where 𝑥(𝑡) = [𝑥
1(𝑡), 𝑥
2(𝑡)]
𝑇
𝐴
1= [
0 1
0.1 −2
] , 𝐴
2= [
0 1
0.1 −0.5 − 1.5𝛽
] ,
𝐵
1= 𝐵
2= [−0.1 − 0.2]
𝑇
, 𝛽 =
0.01
𝜋
,
(51)
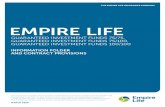
and 𝛽 is used to avoid system matrices being singular.The sampling period 𝑇 = 0.3 s, then the discrete model of
the system is as follows:
𝑅
1: IF 𝑥2 (𝑡)0.5
is about 0,
THEN 𝑥 (𝑘 + 1) = Φ
1𝑥 (𝑘) + (Γ
10+ 𝐷
1𝐹
1(𝜏
𝑘) 𝐸
1) 𝑢 (𝑘)
+ (Γ
11− 𝐷
1𝐹
1(𝜏
𝑘) 𝐸
1) 𝑢 (𝑘 − 1) ,
𝑅
2: IF 𝑥2 (𝑡)0.5
is about 𝜋 or − 𝜋,
THEN 𝑥 (𝑘 + 1) = Φ
2𝑥 (𝑘) + (Γ
20+ 𝐷
2𝐹
2(𝜏
𝑘) 𝐸
2) 𝑢 (𝑘)
+ (Γ
21− 𝐷
2𝐹
2(𝜏
𝑘) 𝐸
2) 𝑢 (𝑘 − 1) ,
(52)
where
Φ
1= [
1.0037 0.2259
0.0226 0.5519
] , Φ
2= [
1.0043 0.2788
0.0279 0.8635
] ,
Γ
10= [
−10.0018
−0.0001
] , Γ
11= [
−10.0390
−0.2260
] ,
Γ
20= [
−10
0
] , Γ
21= [
−10.0432
−0.2788
] ,
𝐷
1= [
20.7693 0.2141
1.0137 −0.4386
] ,
𝐷
2= [
6.8691 0.6676
0.3353 −1.3678
] ,
𝐸
1= [
0.4773
1.0869
] , 𝐸
2= [
1.2500
1.4786
] ,
𝐹
1(𝜏
𝑘) = [
𝑒
−0.0488𝜏𝑘0
0 𝑒
−2.0488(0.3−𝜏𝑘)] ,
𝐹
2(𝜏
𝑘) = [
𝑒
−0.1522𝜏𝑘0
0 𝑒
−0.6570(0.3−𝜏𝑘)] .
(53)
0 2 4 6
0
0.2
0.4
0.6
0.8
1
Deg
ree o
f mem
bers
hip
About 0
−6 −4 −2
x2
About −2∗𝜋 About 2∗𝜋
Figure 2: The membership function of input 𝑥2.
Obviously, 𝐹1(𝜏
𝑘) and 𝐹
2(𝜏
𝑘) satisfy the uncertain matching
conditions:
𝐹
𝑇
1(𝜏
𝑘) 𝐹
1(𝜏
𝑘) ≤ 𝐼, 𝐹
𝑇
2(𝜏
𝑘) 𝐹
2(𝜏
𝑘) ≤ 𝐼. (54)
The membership functions of “about 0” and “about 𝜋 or −𝜋”are selected as in Figure 2.
Suppose the switched fuzzy feed-back controllers are thefollowing fuzzy controllers:
𝑢
1(𝑘) =
2
∑
𝑖=1
𝜇
𝑖(𝑥
2(𝑘)) 𝑘
1𝑖𝑥
𝑖(𝑘) ,
𝑢
2(𝑘) =
2
∑
𝑖=1
𝜇
𝑖(𝑥
2(𝑘)) 𝑘
2𝑖𝑥
𝑖(𝑘) .
(55)
Choose 𝑄 = 0.1𝐼
2 × 2, 𝑅 = 1. Carrying out computations
for matrices inequality (40), we obtain
𝑃
1= [
8.0177 5.2362
5.2362 8.5369
] ,
𝑃
2= [
7.8926 5.4026
5.4026 9.1487
] .
(56)
The controller gain:
𝑘
11= [−0.6138 −0.4204] ,
𝑘
12= [−0.2936, −0.3036] ,
𝑘
21= [−0.4156 −0.3852] ,
𝑘
22= [−0.0893, −0.1025] .
(57)
Let
Ω
1= {𝑥 (𝑘) ∈ 𝑅
2
| 𝑥
𝑇
(𝑘) (𝑃
2− 𝑃
1) 𝑥 (𝑘) ≥ 0, 𝑥 (𝑘) = 0} ,
Ω
2= {𝑥 (𝑘) ∈ 𝑅
2
| 𝑥
𝑇
(𝑘) (𝑃
1− 𝑃
2) 𝑥 (𝑘) ≥ 0, 𝑥 (𝑘) = 0} .
(58)

Mathematical Problems in Engineering 11
0 2 4 6 8 10
0
0.5
1
1.5
2
−0.5
−1
−1.5
x1
x2
Figure 3: The state trajectory using fuzzy controller 1.
ThenΩ1∪Ω
2= 𝑅
2
\ {0}. We design a switched law as follows:
𝜎 (𝑥 (𝑘)) = {
1, 𝑥 (𝑘) ∈ Ω
1,
2, 𝑥 (𝑘) ∈ Ω
2\ Ω
1.
(59)
The initial condition is [1.8 0.5]
𝑇, guaranteed cost bound𝐽
∗
= 36.53.Figures 3 and 4 show the system state trajectories that use
fuzzy controller 1 and fuzzy controller 2, respectively. Figure 5shows the simulating results for the proposed switched fuzzycontroller method. In Figure 5, the system state trajecto-ries indicate that nonlinear networked control system isasymptotically stable and satisfies the performance index viathe designed guaranteed cost controller and the switchinglaw. From the simulating results, we can confirm that theguaranteed cost controller in the switched fuzzy model isable to stabilize the nonlinear delay system via switching T-S fuzzy method. In addition, the performance of switchingfuzzy controller is better than that of the fuzzy controllers.
6. Conclusions
In this paper, we have presented a novel controller designmethodology for a class of nonlinearNCSs based on switchedT-S fuzzy model. By introducing the switching mechanisminto the fuzzy T-S systems, the proposed methods can dealwith the uncertainties of nonlinear NCSs with time delaysand furthermore avoid the inherent drawback of a fuzzy T-Smodel in controller design and implementation of nonlinearsystems. In addition, considering QoS of nonlinear NCSs,some sufficient conditions for the existence of the robustguaranteed cost control law have been built via Lyapunovfunctional approach. Simulation results have verified andconfirmed the effectiveness of the guaranteed cost controllerbased on the switched T-S fuzzy model for nonlinear NCSs.
At present, this paper only presents a numerical exampleto show the validity of our control scheme on the nonlinear
0 2 4 6 8 10
0
0.5
1
1.5
2
−0.5
−1
x1
x2
Figure 4: The state trajectory using fuzzy controller 2.
0 2 4 6 8 10
−0.5
−1
x1
x2
0
0.5
1
1.5
2
Figure 5: The state trajectory using switched fuzzy controller.
NCS with time delays. In next step, we plan to further verifythis control scheme via practical NCSs and investigate thestability analysis and controller design with multiple-packettransmission in nonlinear NCSs. Moreover, the boundednessof the parameter constraints for NCSs will be studied. Theswitched dynamics of nonlinear NCSs will also be consideredin future investigation.
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper.

12 Mathematical Problems in Engineering
Acknowledgments
This work is supported by National Natural Science Foun-dation of China (Grant no. 50804061) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (Grant no. KJ130522).
References
[1] D. Yue, Q.-L. Han, and C. Peng, “State feedback controllerdesign of networked control systems,” IEEE Transactions onCircuits and Systems II, vol. 51, no. 11, pp. 640–644, 2004.
[2] H. Zhang, D. Yang, and T. Chai, “Guaranteed cost networkedcontrol for T-S fuzzy systems with time delays,” IEEE Systems,Man, and Cybernetics Society, vol. 37, no. 2, pp. 160–172, 2007.
[3] X. Luan, P. Shi, and F. Liu, “Stabilization of networked controlsystems with random delays,” IEEE Transactions on IndustrialElectronics, vol. 58, no. 9, pp. 4323–4330, 2011.
[4] B. Rahmani and A. H. D. Markazi, “Variable selective controlmethod for networked control systems,” IEEE Transactions onControl Systems Technology, vol. 21, no. 3, pp. 975–982, 2012.
[5] D. Nesic and A. R. Teel, “Input-to-state stability of networkedcontrol systems,” Automatica, vol. 40, no. 12, pp. 2121–2128,2004.
[6] H. Chu, S. Fei, D. Yue, C. Peng, and J. Sun, “𝐻∞
quantizedcontrol for nonlinear networked control systems,” Fuzzy Setsand Systems, vol. 174, pp. 99–113, 2011.
[7] J. Gao, H. Su, X. Ji, and J. Chu, “Robust stabilization for a class ofnonlinear networked control systems,” Journal of ControlTheoryand Applications, vol. 6, no. 3, pp. 300–304, 2008.
[8] H. Xu and S. Jagannathan, “Stochastic optimal controllerdesign for uncertain nonlinear networked control system neurodynamic programming,” IEEE Transactions On Neural Net-works And Learning Systems, vol. 24, no. 3, pp. 471–484, 2013.
[9] T. Takagi and M. Sugeno, “Fuzzy identification of systems andits applications to modeling and control,” IEEE Transactions onSystems, Man and Cybernetics, vol. 15, no. 1, pp. 116–132, 1985.
[10] R.-J. Wang, W.-W. Lin, and W.-J. Wang, “Stabilizability oflinear quadratic state feedback for uncertain fuzzy time-delaysystems,” IEEE Transactions on Systems, Man, and CyberneticsB, vol. 34, no. 2, pp. 1288–1292, 2004.
[11] B. Chen and X. Liu, “Fuzzy guaranteed cost control for non-linear systems with time-varying delay,” IEEE Transactions onFuzzy Systems, vol. 13, no. 2, pp. 238–249, 2005.
[12] X.-P. Guan and C.-L. Chen, “Delay-dependent guaranteedcost control for T-S fuzzy systems with time delays,” IEEETransactions on Fuzzy Systems, vol. 12, no. 2, pp. 236–249, 2004.
[13] C. Hua and S. X. Ding, “Decentralized networked controlsystem design using T-S fuzzy approach,” IEEE Transactions onFuzzy Systems, vol. 20, no. 1, pp. 9–21, 2012.
[14] F. Delmotte, T. M. Guerra, and M. Ksantini, “ContinuousTakagi-Sugeno’s models: reduction of the number of LMIconditions in various fuzzy control design technics,” IEEETransactions on Fuzzy Systems, vol. 15, no. 3, pp. 426–438, 2007.
[15] D. Jabri, K. Guelton, N. Manamanni et al., “Robust stabilizationof nonlinear systems based on a switched fuzzy control law,”Control Engineering And Applied Informatics, vol. 14, no. 2, pp.40–49, 2012.
[16] H. Ohtake, K. Tanaka, and H. O. Wang, “Switching fuzzycontroller design based on switching lyapunov function for a
class of nonlinear systems,” IEEE Transactions on Systems, Man,and Cybernetics B, vol. 36, no. 1, pp. 13–23, 2006.
[17] H. K. Lam, “Stability analysis of sampled-data fuzzy controllerfor nonlinear systems based on switching T-S fuzzy model,”Nonlinear Analysis, vol. 3, no. 4, pp. 418–432, 2009.
[18] H. Yang and J. Zhao, “Robust control for a class of uncertainswitched fuzzy systems,” Journal of Control Theory and Applica-tions, vol. 5, no. 2, pp. 184–188, 2007.
[19] B. Niu and J. Zhao, “Barrier Lyapunov functions for the outputtracking control of constrained nonlinear switched systems,”Systems & Control Letters, vol. 62, no. 10, pp. 963–971, 2013.
[20] H. K. Lam, F. H. F. Leung, and Y. S. Lee, “Design of a SwitchingController for Nonlinear Systems With Unknown ParametersBased on a Fuzzy Logic Approach,” IEEE Transactions onSystems, Man, and Cybernetics B, vol. 34, no. 2, pp. 1068–1074,2004.
[21] G.-H. Yang and J. Dong, “Switching fuzzy dynamic outputfeedbackH∞ control for nonlinear systems,” IEEETransactionson Systems, Man, and Cybernetics B, vol. 40, no. 2, pp. 505–516,2010.
[22] Y. Sun and J. Xu, “Stability analysis and controller designfor networked control systems with random time delay,” inProceedings of the 9th International Conference on ElectronicMeasurement and Instruments (ICEMI ’09), pp. 136–141, August2009.
[23] L. Xie, “Output feedback𝐻∞control of systems with parameter
uncertainty,” International Journal of Control, vol. 63, no. 4, pp.741–750, 1996.
[24] X.-P. Guan and C.-L. Chen, “Delay-dependent guaranteedcost control for T-S fuzzy systems with time delays,” IEEETransactions on Fuzzy Systems, vol. 12, no. 2, pp. 236–249, 2004.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of