Research Article Swerving Orientation of Spin...
12
Research Article Swerving Orientation of Spin-Stabilized Projectile for Fixed-Cant Canard Control Input Xu-dong Liu, Dong-guang Li, and Qiang Shen School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 10081, China Correspondence should be addressed to Dong-guang Li; [email protected] Received 14 December 2014; Accepted 2 March 2015 Academic Editor: Hakim Naceur Copyright © 2015 Xu-dong Liu et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Due to the large launch overload and high spin rate of spin-stabilized projectile, no attitude sensor is adopted in square crossing fixed-cant canard concept, which causes the lack of existing projectile linear theory for the close form solution of swerving motion. is work focuses on swerving orientation prediction with the restricted conditions. By importing the mathematical models of canard force and moment into the projectile angular motion equations, trim angle induced by canard control force is extracted as the analytical solution of angle of attack increment (AOAI). On this basis, analytical orientations of trajectory angular rate increment and swerving increment are obtained via the frozen coefficient method. A series of simulations under different conditions were implemented to validate the expressions in this effort. Results state that increment orientation of swerving motion can be predicted with available trajectory parameters. e analytical orientations indicate trim value of numerical orientations. Deviations between analytical and numerical orientations relate to initial launch angles and control start time, both lower initial launch angle, and the start time which is closer to the end of flight decreases the deviation convergence time. 1. Introduction To maintain flight stability, large caliber spin-stabilized pro- jectiles are launched with high spin rate, usually 150–300 r/s [1]. High coupling between yaw and pitch flight dynamics makes the cost-effective guidance of spin-stabilized projectile a complex task [2]. To the authors’ knowledge, approaches for this problem can be divided into direct methods and indirect methods, respectively. Dual-spin projectile concept is commonly adopted in the direct methods [3–5]. Projectile swerving dynamics are solved by yaw/pitch channels decoupling controller [6]. e projectile is guided by nominal trajectory tracing [7] or navi- gation autopilot module [8]. However, yaw/pitch decoupling controller consists of relatively complex mechanisms in the dual-spin concept, and attitude information is necessary in this concept. One of the indirect methods proposed by Fres- coni [9] adopts the reduced sensor and actuator requirement concept for spinning projectile’s guidance. Projectile spin rate is reduced to about 10 r/s by installing rear fins; the flight stability is supported by the rear fins. Coupling of pitch and yaw is solved by reducing the gyroscopic effect. However, the rear fin configurations are inapplicable for transforming unguided spin-stabilized projectiles into affordable guided ones. In another indirect method, concept of square crossing fixed-cant canard is adopted [10, 11]. e subsequent trajec- tory is predicted by projectile tracking system and steering commands are determined by empirical formula between impact point deviation predicted and orientation of control force. Hence, detailed projectile swerving motion is not taken into consideration. is concept can effectively improve the impact distribution through field test, but the guiding effect is partly affected by the empirical formula unable to vary with practical flight parameters. Further improvement is con- strained by this factor. erefore, guidance strategy involving no empirical formula in direct methods should be considered in the concept. In the guidance strategy, projectile’s target velocity vector angular rate or target swerving orientation will be provided; hence, analytical expression of swerving motion in terms of the available trajectory parameters is necessary. In [12], Burchett et al. proposed a close form solution for dual-spin projectile swerving motion with the pulsejets, which involved initial attitude information. Ollerenshaw and Costello [13] Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2015, Article ID 173571, 11 pages http://dx.doi.org/10.1155/2015/173571
Transcript of Research Article Swerving Orientation of Spin...

Research ArticleSwerving Orientation of Spin-Stabilized Projectile forFixed-Cant Canard Control Input
Xu-dong Liu Dong-guang Li and Qiang Shen
School of Mechatronical Engineering Beijing Institute of Technology Beijing 10081 China
Correspondence should be addressed to Dong-guang Li lidongguangbiteducn
Received 14 December 2014 Accepted 2 March 2015
Academic Editor Hakim Naceur
Copyright copy 2015 Xu-dong Liu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Due to the large launch overload and high spin rate of spin-stabilized projectile no attitude sensor is adopted in square crossingfixed-cant canard concept which causes the lack of existing projectile linear theory for the close form solution of swerving motionThis work focuses on swerving orientation prediction with the restricted conditions By importing the mathematical models ofcanard force andmoment into the projectile angularmotion equations trim angle induced by canard control force is extracted as theanalytical solution of angle of attack increment (AOAI) On this basis analytical orientations of trajectory angular rate incrementand swerving increment are obtained via the frozen coefficient method A series of simulations under different conditions wereimplemented to validate the expressions in this effort Results state that increment orientation of swerving motion can be predictedwith available trajectory parameters The analytical orientations indicate trim value of numerical orientations Deviations betweenanalytical and numerical orientations relate to initial launch angles and control start time both lower initial launch angle and thestart time which is closer to the end of flight decreases the deviation convergence time
1 Introduction
To maintain flight stability large caliber spin-stabilized pro-jectiles are launched with high spin rate usually 150ndash300 rs[1] High coupling between yaw and pitch flight dynamicsmakes the cost-effective guidance of spin-stabilized projectilea complex task [2] To the authorsrsquo knowledge approaches forthis problem can be divided into direct methods and indirectmethods respectively
Dual-spin projectile concept is commonly adopted inthe direct methods [3ndash5] Projectile swerving dynamics aresolved by yawpitch channels decoupling controller [6] Theprojectile is guided by nominal trajectory tracing [7] or navi-gation autopilot module [8] However yawpitch decouplingcontroller consists of relatively complex mechanisms in thedual-spin concept and attitude information is necessary inthis concept One of the indirect methods proposed by Fres-coni [9] adopts the reduced sensor and actuator requirementconcept for spinning projectilersquos guidance Projectile spin rateis reduced to about 10 rs by installing rear fins the flightstability is supported by the rear fins Coupling of pitch andyaw is solved by reducing the gyroscopic effect However
the rear fin configurations are inapplicable for transformingunguided spin-stabilized projectiles into affordable guidedones In another indirect method concept of square crossingfixed-cant canard is adopted [10 11] The subsequent trajec-tory is predicted by projectile tracking system and steeringcommands are determined by empirical formula betweenimpact point deviation predicted and orientation of controlforce Hence detailed projectile swervingmotion is not takeninto consideration This concept can effectively improve theimpact distribution through field test but the guiding effectis partly affected by the empirical formula unable to varywith practical flight parameters Further improvement is con-strained by this factorTherefore guidance strategy involvingno empirical formula in direct methods should be consideredin the concept
In the guidance strategy projectilersquos target velocity vectorangular rate or target swerving orientation will be providedhence analytical expression of swerving motion in terms ofthe available trajectory parameters is necessary In [12]Burchett et al proposed a close form solution for dual-spinprojectile swervingmotionwith the pulsejets which involvedinitial attitude information Ollerenshaw and Costello [13]
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 173571 11 pageshttpdxdoiorg1011552015173571
2 Mathematical Problems in Engineering
Canard frameProjectile main body
Figure 1 Projectile side view
deduced a general form expression for the fin- and spin-stabilized projectile swerving motion for general force basedon the assumption of zero initial Euler angle while the casedoes not satisfy this assumption In this paper the analyticalexpressions without attitude information are deduced whichcan predict the increment orientation for trajectory angularrate and swerving motion induced by canard control forceThis work extends Murphyrsquos theory of gravity-induced trimangle [14] with a nose control force
2 Projectile Dynamic Model
Projectile with the square crossing fixed-cant canard config-uration is shown in Figure 1 During the flight canard framespins oppositely to projectile main body Differential canards1 and 3 provide despun aerodynamic moment to reduce thespin rate of canard frameThe canard frame can be controlledstatic with respect to the ground at a desired rolling angle byalternator and variable-resistance load system integrated intothe nose portion Attitude sensor is not installed because oflarge launching overload and projectile high self-spin rateAvailable trajectory parameters are velocity vector positioninformation provided by satellite position receiver and mainbody spin rate provided by magnetic sensor Canard controlforce is generated from steering canards 2 and 4 whenthe canard frame despuns at a certain rolling angle Dueto the cant fixed canard magnitude of control force isuncontrollable and orientation of control force is determinedby the rolling angle of canard frame
21 Flight Motions Themass center and around mass centermotions of projectile flight effected by canard control forceare descripted by the mathematical model of 6-DOF rigidmotions which are established in four reference framesrespectively inertial reference frame (IRF 119909
119873-119910119873-119911119873) veloc-
ity reference frame (VRF 1199092-1199102-1199112) no-roll reference frame
(NRRF 120585-120578-120577) and canard reference frame (CRF 120585119888-120578119888-120577119888)
These reference frames and their relationships are shown inFigures 3 4 and 5
In the CRF axle 120585119888coincides with projectile body axle 120585 in
theNRRF axle 120578119888coincides with the direction of canard 1 and
axle 120577119888coincides with the direction of canard 4 in Figure 2
The axles 120578119888and 120577119888rotate around axle 120585 Canard rolling-angle
120574119888is defined as the angle between axles 120578
119888and 120578 Canard
control force and moment models are established in the CRFAccording to Newtonrsquos second law projectile mass center
total velocity vector differential equation is expressed as
119898
dkd119905
= F (1)
1
2
3
4
Figure 2 Canard frame front view
y2
z2
xN
yN
zN
oN
x2(V)
120579a1205952
Figure 3 Description of the IRF and VRF
yN
120585
120577
oN
120596120578
120596120577
1205932
120593a xN
zN
120578
Figure 4 Description of the IRF and NRRF
V(x2)
120578
120577
o 1205751 1205752
120578c
120574c
120577c
120585(120585c)
Figure 5 Definition of the NRRF and CRF
where the total velocity vector v is composed of velocityvector in the VRF and transport velocity vector induced byrotation of the VRF The VRF spin-rate vector is expressedas Ω[2minus119873]
= (120579119886sin1205952 minus2120579119886cos1205952) Total external force
vector F projectile bearing in the VRF is composed of drag
Mathematical Problems in Engineering 3
vector R119909 lift vector R
119910 Magnus vector R
119911 gravity vector
G and canard control force vector F119888 Equation (1) can be
expanded as
119898(
120597k120597119905
+Ω[2minus119873]
times k) = R119909+ R119910+ R119911+ G + F
119888 (2)
where 120597k120597119905means the differential form of velocity vector inthe VRF
Besides the equations of mass center motion are estab-lished in the IRF as
d119909d119905
= V cos1205952cos 120579119886
d119910d119905
= V cos1205952sin 120579119886
d119911d119905
= V sin1205952
(3)
According to the theorem of momentum momentaroundmass center motion of the projectile can be expressedas
dGd119905
= M (4)
The total momentum moment vector is composed ofmomentum moment vector G in the NRRF and transportmomentummoment vector induced by rotation of theNRRFThe NRRF spin-rate vector is expressed as 120596
1 The momen-
tummoment vector is expressed asG = J119860sdot120596 where J
119860means
the inertia matrix and120596means the Euler angular rate matrixThe total external moment vector projectile bearing in theNRRF is composed of the roll damping moment vectorM
119909119911
staticmoment vectorM119911 pitch dampingmoment vectorM
119911119911
Magnus moment vector My and canard inducing controlmoment vectorM
119888 Equation (4) can be expanded as
120597G120597119905
+ 1205961times G = M
119911+M119910+M119909119911+M119911119911+M119888 (5)
where 120597G120597119905 means the differential form of the momentummoment vector in the NRRFThe aroundmass center angularmotion differential equations can be obtained by integratingexpanded form of (5) For brevity detailed expressions offorce and moment are listed in the appendix
22 Canard Force and Moment Canard control force vectoris considered sum of aerodynamic force induced by the fourwings Force vector provided by differential canards 1 and 3in the CRF is indicated as F
119888119889with orientation vertical to
rolling angle and magnitude 119865119888119889 force vector provided by
steering canards 2 and 4 in the CRF is indicated as F119901119889
withorientation parallel to rolling angle and magnitude 119865
119901119889
Expression of canard force vector F119888in the VRF can be
obtained by reference frame transforming
F119888= Ω[120585minus2]
sdotΩ[120585119888minus120585]
sdot (F119888119889+ F119901119889)
=[
[
[
cos 1205752cos 1205751
cos 1205752cos 1205751
sin 1205752
minus sin 1205751
cos 1205751
0
minus sin 1205752cos 1205751minus sin 120575
2sin 1205751cos 1205752
]
]
]
sdot([
[
[
0
minus sin 120574119888119865119888119889
cos 120574119888119865119888119889
]
]
]
+
[
[
[
[
0
cos 120574119888119865119901119889
sin 120574119888119865119901119889
]
]
]
]
)
(6)
where Ω[120585minus2]
means transforming matrix from the NRRF toVRF andΩ
[120585119888minus120585]means transforming vector from the CRF to
NRRFCanard control moment vector M
119888in the NRRF is
considered sumofmoment vectorM119888119889by differential canards
1 and 3 andM119901119889
by steering canards 2 and 4 as
M119888= M119888119889+M119901119889=[
[
[
0
sin 120574119888119872119888119889
cos 120574119888119872119888119889
]
]
]
+
[
[
[
[
0
cos 120574119888119872119901119889
minus sin 120574119888119872119901119889
]
]
]
]
(7)
According to the relationship between force and moment119872119888119889= 119865119888119889times1198830and119872
119901119889= 119865119901119889times1198830 where119883
0means the axial
distance between mass center and pressure center of canardframe
In this section models of projectile flight motion andcanard control force and moment for numerical solution ofswerving motion are established Note that some small mag-nitude aerodynamic forces are ignored such as drag force androll damping moment brought to the projectile main bodyby the canard frame Moreover aerodynamic force yieldedby canard 1 shows similar magnitude and opposite directionwith force yielded by canard 3 hence the balance forceand moment of them 119865
119888119889 119872119888119889
can be neglected to simplifythe deduce process of analytical swerving motion expres-sions
3 Angular Motion Linearization
In the 6-DOF mathematical model angular motions in masscenter and around mass center motions are highly coupledTo linearize the angular motion 6-DOF model is processedwith the following assumptions
(a) ignore the products of small magnitude values andhigh order of them
(b) ignore the asymmetric of the projectile geometricparameters and eccentricity of mass center
(c) consider the AOA small magnitude values andassume the following approximation
sin 1205751asymp 1205751 sin 120575
2asymp 1205752
cos 1205751asymp 1 cos 120575
2asymp 1
120573 asymp 0 1205751asymp 120601119886minus 120579119886 120575
2asymp 1206012minus 1205952
(8)
4 Mathematical Problems in Engineering
(d) ignore the drag force 119865119909119888
and roll damping moment119872120585119888induced by fixed-cant canard frame
(e) ignore the 119865119888119889and119872
119888119889yielded by differential canards
1 and 3 assume the magnitude approximation 119865119888asymp
119865119901119889119872119888asymp 119865119901119889times 1198830
Then (2) and (5) are expanded and simplified by theabove rules Differential equations of trajectory path anddeflection angle and second-order differential equations ofpitch and yaw angle are obtained as follows
120579119886=
(119876V211988810158401199101205751+ 119876V21198881015840
1199111205752minus 119898119892 cos 120579
119886+ cos 120574
119888119865119888)
119898V
(9)
2=
(119876V211988810158401199101205752minus 119876V21198881015840
1199111205751+ 119898119892 sin 120579
119886sin1205952+ sin 120574
119888119865119888)
119898V
(10)
119886= (minus119876119897V21198981015840
1199111205751minus 119876119897119889V120596
1205771198981015840
119911119911minus 119876119897119889120596
120585V119898101584010158401199101205752
+119862120596120585120596120578+ 120596120578120596120577tan1206012+ 1198830cos 120574119888119865119888) (119860)minus1
(11)
2= (119876119897V21198981015840
1199111205752+ 119876119897119889V120596
1205781198981015840
119911119911minus 119876119897119889120596
120585V119898101584010158401199101205751
+119862120596120585120596120577minus 120596120578
2 tan1206012+ 1198830sin 120574119888119865119888) (119860)minus1
(12)
The complex trajectory angle differential equation is obtainedby adding (9) with (10) multiplied by imaginary unit 119894 as
Ψ = (119887119910V minus 119894119887119911120574)Δ +
119865119888
119898V119890119894120574119888
(13)
where 119887119910= 119876V1198881015840
119910119898 119887119911= 119876V1198881015840
119911119898 119890119894120574119888 = cos 120574
119888+ 119894 sin 120574
119888
Ψ = 120579119886+ 1198941205952 Δ = 120575
1+ 1198941205752 Differentiating (13) with respect
to time yields
Ψ = (119887119910V minus 119894119887119911120574)Δ + (119887
119910V minus 119894119887119911120574) Δ minus
V119865119888
119898V2119890119894120574119888
(14)
Meanwhile complex Euler angle differential equation isobtained by adding (11) with (12) multiplied by ndash119894 as
Φ + (119896119911119911V minus 119894
119862
119860
120574) Φ = (119896119911V2 + 119896
119910V)Δ +
1198830
119860
119865119888119890119894120574119888
(15)
where 119896119911= 119876119897119898
1015840
119911119860 119896119911119911= 11987611989721198981015840
119911119911119860 119896119910= 119876119897119889119896
10158401015840
119910119860 Φ =
120593119886+ 1198941205932
Consider the relationships between trajectory angleEuler angle and angle of attack Φ = Ψ + Δ Φ = Ψ + ΔComplex angle of attack (AOA) motion can be obtained byimporting (13) and (14) into (15) The expression of complexAOA differential equation is shown as in formula (17)
In order to linearize the complex AOA differential equa-tion time infinitesimal d(119905) is substituted by dimensionlesstrajectory arc infinitesimal d(119904) using the following deriva-tion form
V = V sdot V1015840 Δ = V sdot Δ1015840
Δ = V2 sdot Δ10158401015840 minus V2 sdot Δ1015840 (119887119909+
119892 sin 120579V2
)
(16)
The factors V2 and V in (17) are eliminated by importingthe above relationships and (17) can be linearized as (18)
Δ + (119896119911119911+ 119887119910minus 119894
119862 120574
119860V) VΔ minus [119896
119911+ 119894
119862 120574
119860V(119887119910minus
119860
119862
119896119910)] V2Δ
= minus120579 minus
120579V(119896119911119911minus 119894
119862 120574
119860V)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)119865119888119890119894120574119888
(17)
Δ10158401015840+ (119867 minus 119894119875)Δ
1015840minus (119872 + 119894119875119879)Δ
= minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
(18)
where 119867 = 119896119911119911+ 119887119910minus 119887119909minus 119892 sin 120579V2119875 = 119862 120574119860V 119872 = 119896
119911
and 119879 = 119887119910minus 119896119910119860119862
4 Analytical Solutions
41 Complex AOAI Solution To deduce the solution of linearnonhomogeneous differential equation (18) first we assumethe general solution form of homogeneous equation as
Δ = 11986211198901198971119904+ 11986221198901198972119904 (19)
where1198621and119862
2are indeterminate constants and 119897
1and 1198972are
eigenvalues of homogeneous equation hence the followingequations are set up
1198972
12+ (119867 minus 119894119875) 11989712
minus (119872 + 119894119875119879) = 0 (20a)
1198971+ 1198972= minus (119867 minus 119894119875) (20b)
1198971sdot 1198972= minus (119872 + 119894119875119879) (20c)
Differentiating (19) with respect to trajectory arc yields
Δ1015840= 1198621015840
1(119904) 1198901198971119904+ 1198621015840
2(119904) 1198901198972119904+ 11986211198972
11198901198971119904+ 11986221198972
21198901198972119904 (21)
Assuming 119862101584011198901198971119904+ 1198621015840
21198901198972119904= 0 and differentiating (21) with
respect to trajectory arc yield
Δ10158401015840= 1198621015840
1(119904) 1198971
1198901198971119904+ 1198621015840
2(119904) 1198972
1198901198972119904+ 11986211198972
11198901198971119904+ 11986221198972
21198901198972119904 (22)
Importing (19) (20a) (20b) (20c) (21) and (22) into (18)yields
1198621015840
111989711198901198971119904+ 1198621015840
211989721198901198972119904
= minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
(23)
Mathematical Problems in Engineering 5
Solution of simultaneous expressions equation (23) and1198621015840
11198901198971119904+ 1198621015840
21198901198972119904= 0 is written as
1198621015840
12(119904)
= plusmn
1
1198971minus 1198972
[minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
] 119890minus11989712119904
(24)
Then constants 1198621 1198622are determined by integrating (24)
Considering 120579
120579 variables the integrating result is expressed
as
11986212 (
119904)
= plusmn
1
1198971minus 1198972
[
120579
V211989712
+
120579
V211989712
2(119896119911119911minus 119894119875) +
120579
V11989712
times (119896119911119911minus 119894119875)] 119890
minus11989712119904
∓ (
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
times
119865119888
119898V211989712
119890minus11989712119904+119894120574119888
(25)
Finally importing (20b) (20c) and (25) into (19) yieldsthe particular solution of the complex angular motion as
Δ =1
119872 + 119894119875119879
[
120579
V2+
120579
V(119896119911119911minus 119894119875)] +
119896119911119911minus 119894119875
V2times
119867 minus 119894119875
119872 + 119894119875119879
120579
minus
1
119872 + 119894119875119879
(
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
119865119888
119898V2119890119894120574119888
(26)
The trim angle inducing by the canard control force isindicated by the items containing parameter 119865
119888 By observing
right-hand items of particular solution the analytical expres-sion of complex AOAI induced by canard control force canbe extracted as
Δ119888= 1205751119888+ 1198941205752119888
= minus
1
119872 + 119894119875119879
(
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
119865119888
119898V2119890119894120574119888
(27)
Transforming the denominator into real numbers and omit-ting small magnitude values (27) is expressed in a short formas
1205751119888= [1198701cos 120574119888minus 1198702sin 120574119888]
119865119888
119898V2 (28a)
1205752119888= [1198702cos 120574119888+ 1198701sin 120574119888]
119865119888
119898V2 (28b)
where
1198701= minus
1198981198830
119872119860
minus
V119872V2
minus
1198752119879
1198722 (29a)
1198702=
1198981198830119875119879
1198722119860
+
V1198751198791198722V2
+
119875
119872
(29b)
42 Complex TARI Solution The frozen coefficientmethod isadopted to deduce analytical solutions of trajectory parame-ter increment in swervingmotionThe angular rate of velocityvector in VRF is expressed as trajectory path angular ratein plane 119900-119909
2-1199102and deflection angular rate in plane 119900-119909
2-
1199112 The trajectory angular rate increment (TARI) indicates
the orientation of velocity vector rotation The differentialequations of trajectory angular rate with canard controlforce refer to (9) and (10) trajectory angular rate increment(TARI) for canard control force is obtained by subtracting thedifferential equation of trajectory angular rate without canardcontrol force For brevity result is written as
[
120579119886119888
2119888
] = [
1205751119888
1205752119888
] 119887119910V + [
1205752119888
minus1205751119888
] 119887119911V + [
cos 120574119888
sin 120574119888
] sdot
119865119888
119898V (30)
According to the main principle of frozen coefficientmethod slowly varying trajectory parameters are consideredas constants in a short time such as the total velocity dynamicpressure and aerodynamic coefficients Submitting complexAOAI analytical solutions 120575
1119888 1205752119888to (30) yields
[
120579119886119888
2119888
] = [
1198721cos 120574119888+1198722sin 120574119888
minus1198722cos 120574119888+1198721sin 120574119888
] sdot
119865119888
119898V (31a)
1198721= 1198871199101198701+ 1198871199111198702+ 1 (31b)
1198722= 1198871199111198701minus 1198871199101198702 (31c)
43 Increment Orientations Differential equation of masscenter swerving motion with canard control force referringto (4) is written as
119910 = cos (1205952+ Δ119905 sdot
2119888) sin (120579
119886+ Δ119905 sdot
120579119886119888) sdot V (32a)
= sin (1205952+ Δ119905 sdot
2119888) sdot V (32b)
Assuming that the short time is Δ119905 sin( 120579119886sdot Δ119905) asymp
120579119886sdot Δ119905
sin(2sdot Δ119905) asymp
2sdot Δ119905 cos( 120579
119886sdot Δ119905) asymp 1 and cos(
2sdot Δ119905) asymp 1
Subtracting (32a) and (32b) with differential equation ofmass center swerving motion without canard control forceprojectile swerving increment induced by the canard controlforce in short time Δ119905 is obtained as
119910119888= (cos120595
2cos 120579119886sdot120579119886119888minus sin120595
2sin 120579119886sdot 2119888
minus cos 120579119886sin1205952sdot120579119886119888sdot 2119888sdot Δ119905) sdot V sdot Δ1199052
(33a)
119911119888= cos120595
2sdot 2119888sdot V sdot Δ1199052 (33b)
6 Mathematical Problems in Engineering
Vminus
V+
ΔV
120578
120595minus2
120595+2
120579minusa
120601TARI
120579+a
120577
120601SWER
yc
zcz
y
(yminus zminus)
(y+ z+)
Figure 6 Rear view of the projectile definition of 120601TARI 120601SWER ldquominusrdquo means uncontrolled state ldquo+rdquo means controlled state The positive 120585 and119909 point into the page
Table 1 Parameters involved in analytical expressions
Constantcoefficient
Variablecoefficient
Trajectoryparameters Control input
119898 1198830
V
119865119888
119860 119896119911
120579119886
119862 119887119909
1205952
119892 119887119910
120574
Δ119905 119896119910 V
Simple algebraic manipulation yields the analyticalexpressions of orientations of TARI and swerving incrementshown in Figure 6
120601TARI = tanminus1 (2119888
120579119886119888
) 2119888le 0
120601TARI = tanminus1 (2119888
120579119886119888
) + 180 2119888gt 0
(34a)
120601SWER = tanminus1 (119911119888
119910119888
) 119911119888le 0
120601SWER = tanminus1 (119911119888
119910119888
) + 180 119911119888gt 0
(34b)
All parameters involved in analytical expressions arelisted in Table 1 Real-time performance of analytical solu-tions is ensured by the variable coefficients which areupdated with the trajectory parameters and aerodynamiccoefficients during the flight Combining with the trajectoryparameters and constant coefficients the orientations ofTARI and swerving increment with canard control input canbe predicted Note that the flying stability of the projectileshould exist
5 Simulation Results
In this chapter numerical simulations of projectile 6-DOFrigid motions with and without canard control were imple-mented Numerical solutions of trajectory parameter incre-ments are obtained by subtraction operation Meanwhile
Table 2 Projectile physical properties
119898 (kg) 119883119888(m) 119862 119860 119871 (m) 119863 (m)
45 0343 016 18 09 0155
Table 3 Initial launch conditions
Launch conditions Meteorological conditionsVelocity 930ms Ground pressure 1000 hPaElevation 50 deg Virtual temperature 2889Direction 0 deg Longitudinal wind 0msSpin rate 1800 rads Lateral wind 0ms
analytical solutions of TARI and swerving increment arecalculated by equations in the above section and orientationdeviations are analyzed by comparing with the numericalsolutions
51 Simulation Configurations Projectile physical propertiesreferring to the actual parameters are listed in Table 2 andthe initial launch conditions are listed in Table 3 The fourth-order Runge-Kutta method is employed in the numericalsimulations and the step-size is 000001 s
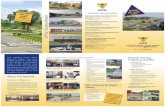
Projectile aerodynamic coefficients are obtained by aseries of computational fluid dynamics simulations previ-ously All coefficients are expressed as function of Machnumber shown in Figure 7 The numerical unguided 6-DOFrigid trajectory result is in good agreement with the firingtable data of the conventional 155mm spin-stabilized projec-tile
52 Numerical Trajectory Results Trajectory simulations of155mm spin-stabilized projectile with and without canardcontrol force are implemented under the same initial condi-tions Control period is set as the duration from apogee point(50 sec) to impact point and the canard rolling-angle 120574
119888is set
as 0 degFigure 8 shows the results of trajectory numerical simu-
lations Impact point drift of controlled trajectory indicates(Δ119909 Δ119911) = (1320m 753m) and the impact point drift
Mathematical Problems in Engineering 7
00 05 10 15 20 25 30 350
1
2
3
4
5
6
7
Mach number
Stat
ic ae
rody
nam
ic co
effici
ent
cy998400
mz998400
cx998400
(a) Static aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
0
10
20
Mach number
cz998400
mzz998400
mxz998400
my998400
Stat
ic ae
rody
nam
ic co
effici
ent
(b) Dynamic aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
000
001
Mach number
Cana
rd effi
cien
cy co
effici
ent
minus006
minus005
minus004
minus003
minus002
minus001
cpdmpd
ccdmcd
(c) Canard efficiency coefficients versus Mach number
00 05 10 15 20 25 30 35295
300
305
310
315
320
325
330
335
340
Mach number
Cen
ter o
f can
ard
pres
sure
coeffi
cien
t
X0
(d) Canard pressure center coefficient versus Mach number
Figure 7 Aerodynamic coefficients adopted in 6-DOF mathematical model
orientation indicates 297 deg Inconsistency can be seen fromthe impact point drift orientation and canard rolling angle
One of the influence factors is the nonconcentratedcontrol force orientation caused by the gyroscopic effectwhich can be reflected by the angularmotion of the projectileHowever the angular motion around the center of mass isindicated by the AOAI and the angular motion of velocityvector is indicated by the TARI To observe these angularmotions 3D curves of complex AOAI and TARI with timehistory are shown in Figures 9 and 10
Damped oscillation waves can be seen in numericalsolutions of complex AOAI and TARI with similar frequencyAccording to the control system stability criterion the angu-lar motions converge to steady state at about 20 sec aftercanard control started Therefore the adoptive prediction
orientations should be steady state value or trim value of theoscillation process
53 Analytical Angular Motion Results Combining with theknown meteorological parameters aerodynamic coefficientand rolling-angle 120574
119888 analytical solution of the AOAI is cal-
culated via (28a) and (28b) by using the controlled trajectoryparameters Moreover analytical solution of TARI is calcu-lated by (31a) (31b) and (31c) For the convenience of orienta-tion observation projection of analytical and numerical com-plex AOAI and TARI in plane of 119900-120578-120577 and 119900-119910
2-1199112is shown
in Figures 11 and 12 Due to the approximate process forthe deduction of analytical expression magnitude deviationcan be seen from the comparison However our attention isconcentrated in the orientation prediction By comparing
8 Mathematical Problems in Engineering
01
23
05001000150020000
5000
10000
15000
Hei
ght (
m)
Apogee point
Controlled IPP (298658 16404)
Uncontrolled IPP(296811 15548)
Launch point times104
Cross-range (m) Range (m)
Controlled trajectoryUncontrolled trajectory
Figure 8 Projectile 3D trajectory comparison
50 60 70 80 90 100 1100
Time (s)
Angle of slip side (deg)
Ang
le o
f in
cide
nce (
deg)
minus1
minus05
05minus05
0
05
1 70 s
Figure 9 3D curve of complex AOAI with time history
50 60 70 80 90 100 1100
002004
0
002
004
006
Time (s)
Deflection angular
rate (degs)
Tilt
angu
lar r
ate (
deg
s)
minus004minus002
minus002
70 s
Figure 10 3D curve of complex TARI with time history
the orientations of analytical solutions with numerical steadystate value well agreement can be seen in this case andanalytical orientations indicate the trim value of numericalorientations To discuss general applicability of analyticalorientation expressions for TARI and swerving incrementmore simulations are implemented in the following section
00 02 04 06
00
04
08
12
Numerical solutionAnalytical solution
minus06 minus04 minus02
1205752c (rad)
1205751c
(rad
)Figure 11 Projection of complex AOAI in plane of 119900-120578-120577
000 002 004 006
000
002
004
006
Analytical solutionNumerical solution
minus002minus002
120579a
(rad
s)
1205952 (rads)
Figure 12 Projection of complex TARI in plane of 119900-1199102-1199112
54 Orientation Prediction Under different conditions ana-lytical and numerical orientations of TARI and swervingincrement were calculated The start time of control periodis set at the apogee point 15 s later and 30 s later The initialelevations are set as 50 deg 40 deg and 30 deg The numer-ical and analytical orientations of TARI and swerving incre-ment are drawn in Figures 13 14 and 15
As seen from the left side figures analytical TARI orienta-tions are not affected by initial elevation and control start timeand appear as trim value of numerical orientations Considerthat the deviations between numerical and analytical orienta-tions achieve steady state when the amplitude of oscillation is
Mathematical Problems in Engineering 9
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
7 s10 sStart time 80 sStart time 65 s
Start time 50 s
16 s
120601TA
RI(r
ad)
(a) TARI orientation
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
Start time 80 sStart time 65 sStart time 50 s
3s7 s12 s
120601SW
ER(r
ad)
(b) Swerving increment orientation
Figure 13 Numerical and analytical results under initial elevation 50 deg
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601TA
RI(r
ad)
45 sStart time 67 s
7 s
Start time 37 sStart time 52 s
12 s
Numerical solutionAnalytical solution
(a) TARI orientation
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 67 sStart time 37 s Start time 52 s
2 s4 s5 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 14 Numerical and analytical results under initial elevation 40 deg
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601TA
RI(r
ad)
6 s Start time 59 s
Start time 44 s
6 s
Start time 29 s
7 s
Numerical solutionAnalytical solution
(a) TARI orientation
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 59 sStart time 44 sStart time 29 s
2 s3 s3 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 15 Numerical and analytical results under initial elevation 30 deg
less than 10 deg Convergence time for the deviation reachingsteady state is recorded For each initial elevation closercontrol start time to the end of flight costs less convergencetime and for different initial elevations lower initial elevationangle costs less convergence time
As seen from the right side figures no oscillation processis indicated from the deviation between numerical and ana-lytical swerving increment orientations The deviations arefirstly decreased during the beginning of control period and
then negative deviations increased and time durations for thedeviations decreasing to less than 10 deg are recorded Simi-lar law can be seen from the recorded orientation deviationdecreasing time of TARI and swerving increment and theswerving increment orientation deviations are converged in ashorter time than the TARI orientation deviations under thesame initial elevation It is worth noting that at the start timeof 59 sec in Figure 15 the numerical TARI orientation reachesthe critical divergence state and the analytical orientation still
10 Mathematical Problems in Engineering
represents trim value of the oscillation processMoreover theanalytical and numerical solution of swerving orientationsshows little affection by the critical divergence state of TARI
6 Conclusions
This paper focuses on the swerving orientation prediction forthe square crossing fixed-cant canard configuration Analyt-ical expressions of TARI and swerving increment orientationare deduced without the attitude information Based on thesimulations under different initial elevation and control timeconditions the following conclusions can be obtained
(1) Analytical orientations of TARI and swerving incre-ment indicate the trim value of the numerical orien-tations Deviations between numerical and analyticalorientations converge in period of time after controlstarted
(2) For each initial elevation closer control start timesto the end of flight cost less convergence time Fordifferent initial elevations lower initial elevation costsless convergence time
(3) Based on the target trajectory angular rate orientationor target swerving orientation provided by navigationsystem the desired rolling angle of canard frame canbe determined by the reverse solution of incrementorientation analytical expressions By setting appro-priate control start time and duration cost-effectiveguidance strategy involving no empirical formula forfixed-cant canard configurationwill be accomplished
Appendix
Force and Moment Expressions
The direction of drag vector points at the negative 1199092 in the
VRF the expression of R119909can be written as
R119909=[
[
[
minus1
0
0
]
]
]
sdot 119876V2119888119909 (A1)
Lift vector was obtained by transforming the normal force inthe NRRF and the short form of R
119910is
R119910=[
[
[
cos 1205752cos 1205751minus 1
cos 1205752sin 1205751
sin 1205752
]
]
]
sdot 119876V21198881015840119910 (A2)
Direction of the Magnus force vector points at the directionof k times 120585 and the expression of R
119911is
R119911=[
[
[
0
sin 1205752
minus cos 1205752sin 1205751
]
]
]
sdot 119876V21198881015840119911 (A3)
Expression of the gravity vector in the VRF can be written as
G =[
[
[
sin 120579119886cos1205952
cos 120579119886
sin 120579119886sin1205952
]
]
]
sdot 119898119892 (A4)
Static moment vector points at the direction of k times 120585 and theexpression ofM
119911can be obtained as
M119911=[
[
[
0
minus sin 1205751sin120573 + sin 120575
2cos 1205751cos120573
sin 1205751
]
]
]
119876119897V21198981015840 (A5)
Transverse damping moment vector points at the oppositedirection of the NRRF spin-rate vector 120596
1 which can be
written as
M119911119911=
[
[
[
[
0
minus120596120578
minus120596120577
]
]
]
]
119876119897119889V1198981015840119911119911 (A6)
The axial damping moment vector in the NRRF is written as
M119909119911=[
[
[
1
0
0
]
]
]
sdot 119876119897119889V1205961205851198981015840
119909119911 (A7)
Magnus moment vector is induced by the Magnus forcepointing at the plane of AOA and M
119910points at direction of
120585 times (120585 times k) and is expressed as
M119910=[
[
[
0
sin 1205751cos120573 + sin 120575
2cos 1205751sin120573
sin 1205752cos 1205751
]
]
]
119876119897119889120596120585V11989810158401015840119910
(A8)
Canard forces 119865119901119889 119865119888119889
depending on steering canards anddifferential canard are expressed as
119865119901119889= 119876V2119888
119901119889
119865119888119889= 119876V2119888
119888119889
(A9)
Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Canard frameProjectile main body
Figure 1 Projectile side view
deduced a general form expression for the fin- and spin-stabilized projectile swerving motion for general force basedon the assumption of zero initial Euler angle while the casedoes not satisfy this assumption In this paper the analyticalexpressions without attitude information are deduced whichcan predict the increment orientation for trajectory angularrate and swerving motion induced by canard control forceThis work extends Murphyrsquos theory of gravity-induced trimangle [14] with a nose control force
2 Projectile Dynamic Model
Projectile with the square crossing fixed-cant canard config-uration is shown in Figure 1 During the flight canard framespins oppositely to projectile main body Differential canards1 and 3 provide despun aerodynamic moment to reduce thespin rate of canard frameThe canard frame can be controlledstatic with respect to the ground at a desired rolling angle byalternator and variable-resistance load system integrated intothe nose portion Attitude sensor is not installed because oflarge launching overload and projectile high self-spin rateAvailable trajectory parameters are velocity vector positioninformation provided by satellite position receiver and mainbody spin rate provided by magnetic sensor Canard controlforce is generated from steering canards 2 and 4 whenthe canard frame despuns at a certain rolling angle Dueto the cant fixed canard magnitude of control force isuncontrollable and orientation of control force is determinedby the rolling angle of canard frame
21 Flight Motions Themass center and around mass centermotions of projectile flight effected by canard control forceare descripted by the mathematical model of 6-DOF rigidmotions which are established in four reference framesrespectively inertial reference frame (IRF 119909
119873-119910119873-119911119873) veloc-
ity reference frame (VRF 1199092-1199102-1199112) no-roll reference frame
(NRRF 120585-120578-120577) and canard reference frame (CRF 120585119888-120578119888-120577119888)
These reference frames and their relationships are shown inFigures 3 4 and 5
In the CRF axle 120585119888coincides with projectile body axle 120585 in
theNRRF axle 120578119888coincides with the direction of canard 1 and
axle 120577119888coincides with the direction of canard 4 in Figure 2
The axles 120578119888and 120577119888rotate around axle 120585 Canard rolling-angle
120574119888is defined as the angle between axles 120578
119888and 120578 Canard
control force and moment models are established in the CRFAccording to Newtonrsquos second law projectile mass center
total velocity vector differential equation is expressed as
119898
dkd119905
= F (1)
1
2
3
4
Figure 2 Canard frame front view
y2
z2
xN
yN
zN
oN
x2(V)
120579a1205952
Figure 3 Description of the IRF and VRF
yN
120585
120577
oN
120596120578
120596120577
1205932
120593a xN
zN
120578
Figure 4 Description of the IRF and NRRF
V(x2)
120578
120577
o 1205751 1205752
120578c
120574c
120577c
120585(120585c)
Figure 5 Definition of the NRRF and CRF
where the total velocity vector v is composed of velocityvector in the VRF and transport velocity vector induced byrotation of the VRF The VRF spin-rate vector is expressedas Ω[2minus119873]
= (120579119886sin1205952 minus2120579119886cos1205952) Total external force
vector F projectile bearing in the VRF is composed of drag
Mathematical Problems in Engineering 3
vector R119909 lift vector R
119910 Magnus vector R
119911 gravity vector
G and canard control force vector F119888 Equation (1) can be
expanded as
119898(
120597k120597119905
+Ω[2minus119873]
times k) = R119909+ R119910+ R119911+ G + F
119888 (2)
where 120597k120597119905means the differential form of velocity vector inthe VRF
Besides the equations of mass center motion are estab-lished in the IRF as
d119909d119905
= V cos1205952cos 120579119886
d119910d119905
= V cos1205952sin 120579119886
d119911d119905
= V sin1205952
(3)
According to the theorem of momentum momentaroundmass center motion of the projectile can be expressedas
dGd119905
= M (4)
The total momentum moment vector is composed ofmomentum moment vector G in the NRRF and transportmomentummoment vector induced by rotation of theNRRFThe NRRF spin-rate vector is expressed as 120596
1 The momen-
tummoment vector is expressed asG = J119860sdot120596 where J
119860means
the inertia matrix and120596means the Euler angular rate matrixThe total external moment vector projectile bearing in theNRRF is composed of the roll damping moment vectorM
119909119911
staticmoment vectorM119911 pitch dampingmoment vectorM
119911119911
Magnus moment vector My and canard inducing controlmoment vectorM
119888 Equation (4) can be expanded as
120597G120597119905
+ 1205961times G = M
119911+M119910+M119909119911+M119911119911+M119888 (5)
where 120597G120597119905 means the differential form of the momentummoment vector in the NRRFThe aroundmass center angularmotion differential equations can be obtained by integratingexpanded form of (5) For brevity detailed expressions offorce and moment are listed in the appendix
22 Canard Force and Moment Canard control force vectoris considered sum of aerodynamic force induced by the fourwings Force vector provided by differential canards 1 and 3in the CRF is indicated as F
119888119889with orientation vertical to
rolling angle and magnitude 119865119888119889 force vector provided by
steering canards 2 and 4 in the CRF is indicated as F119901119889
withorientation parallel to rolling angle and magnitude 119865
119901119889
Expression of canard force vector F119888in the VRF can be
obtained by reference frame transforming
F119888= Ω[120585minus2]
sdotΩ[120585119888minus120585]
sdot (F119888119889+ F119901119889)
=[
[
[
cos 1205752cos 1205751
cos 1205752cos 1205751
sin 1205752
minus sin 1205751
cos 1205751
0
minus sin 1205752cos 1205751minus sin 120575
2sin 1205751cos 1205752
]
]
]
sdot([
[
[
0
minus sin 120574119888119865119888119889
cos 120574119888119865119888119889
]
]
]
+
[
[
[
[
0
cos 120574119888119865119901119889
sin 120574119888119865119901119889
]
]
]
]
)
(6)
where Ω[120585minus2]
means transforming matrix from the NRRF toVRF andΩ
[120585119888minus120585]means transforming vector from the CRF to
NRRFCanard control moment vector M
119888in the NRRF is
considered sumofmoment vectorM119888119889by differential canards
1 and 3 andM119901119889
by steering canards 2 and 4 as
M119888= M119888119889+M119901119889=[
[
[
0
sin 120574119888119872119888119889
cos 120574119888119872119888119889
]
]
]
+
[
[
[
[
0
cos 120574119888119872119901119889
minus sin 120574119888119872119901119889
]
]
]
]
(7)
According to the relationship between force and moment119872119888119889= 119865119888119889times1198830and119872
119901119889= 119865119901119889times1198830 where119883
0means the axial
distance between mass center and pressure center of canardframe
In this section models of projectile flight motion andcanard control force and moment for numerical solution ofswerving motion are established Note that some small mag-nitude aerodynamic forces are ignored such as drag force androll damping moment brought to the projectile main bodyby the canard frame Moreover aerodynamic force yieldedby canard 1 shows similar magnitude and opposite directionwith force yielded by canard 3 hence the balance forceand moment of them 119865
119888119889 119872119888119889
can be neglected to simplifythe deduce process of analytical swerving motion expres-sions
3 Angular Motion Linearization
In the 6-DOF mathematical model angular motions in masscenter and around mass center motions are highly coupledTo linearize the angular motion 6-DOF model is processedwith the following assumptions
(a) ignore the products of small magnitude values andhigh order of them
(b) ignore the asymmetric of the projectile geometricparameters and eccentricity of mass center
(c) consider the AOA small magnitude values andassume the following approximation
sin 1205751asymp 1205751 sin 120575
2asymp 1205752
cos 1205751asymp 1 cos 120575
2asymp 1
120573 asymp 0 1205751asymp 120601119886minus 120579119886 120575
2asymp 1206012minus 1205952
(8)
4 Mathematical Problems in Engineering
(d) ignore the drag force 119865119909119888
and roll damping moment119872120585119888induced by fixed-cant canard frame
(e) ignore the 119865119888119889and119872
119888119889yielded by differential canards
1 and 3 assume the magnitude approximation 119865119888asymp
119865119901119889119872119888asymp 119865119901119889times 1198830
Then (2) and (5) are expanded and simplified by theabove rules Differential equations of trajectory path anddeflection angle and second-order differential equations ofpitch and yaw angle are obtained as follows
120579119886=
(119876V211988810158401199101205751+ 119876V21198881015840
1199111205752minus 119898119892 cos 120579
119886+ cos 120574
119888119865119888)
119898V
(9)
2=
(119876V211988810158401199101205752minus 119876V21198881015840
1199111205751+ 119898119892 sin 120579
119886sin1205952+ sin 120574
119888119865119888)
119898V
(10)
119886= (minus119876119897V21198981015840
1199111205751minus 119876119897119889V120596
1205771198981015840
119911119911minus 119876119897119889120596
120585V119898101584010158401199101205752
+119862120596120585120596120578+ 120596120578120596120577tan1206012+ 1198830cos 120574119888119865119888) (119860)minus1
(11)
2= (119876119897V21198981015840
1199111205752+ 119876119897119889V120596
1205781198981015840
119911119911minus 119876119897119889120596
120585V119898101584010158401199101205751
+119862120596120585120596120577minus 120596120578
2 tan1206012+ 1198830sin 120574119888119865119888) (119860)minus1
(12)
The complex trajectory angle differential equation is obtainedby adding (9) with (10) multiplied by imaginary unit 119894 as
Ψ = (119887119910V minus 119894119887119911120574)Δ +
119865119888
119898V119890119894120574119888
(13)
where 119887119910= 119876V1198881015840
119910119898 119887119911= 119876V1198881015840
119911119898 119890119894120574119888 = cos 120574
119888+ 119894 sin 120574
119888
Ψ = 120579119886+ 1198941205952 Δ = 120575
1+ 1198941205752 Differentiating (13) with respect
to time yields
Ψ = (119887119910V minus 119894119887119911120574)Δ + (119887
119910V minus 119894119887119911120574) Δ minus
V119865119888
119898V2119890119894120574119888
(14)
Meanwhile complex Euler angle differential equation isobtained by adding (11) with (12) multiplied by ndash119894 as
Φ + (119896119911119911V minus 119894
119862
119860
120574) Φ = (119896119911V2 + 119896
119910V)Δ +
1198830
119860
119865119888119890119894120574119888
(15)
where 119896119911= 119876119897119898
1015840
119911119860 119896119911119911= 11987611989721198981015840
119911119911119860 119896119910= 119876119897119889119896
10158401015840
119910119860 Φ =
120593119886+ 1198941205932
Consider the relationships between trajectory angleEuler angle and angle of attack Φ = Ψ + Δ Φ = Ψ + ΔComplex angle of attack (AOA) motion can be obtained byimporting (13) and (14) into (15) The expression of complexAOA differential equation is shown as in formula (17)
In order to linearize the complex AOA differential equa-tion time infinitesimal d(119905) is substituted by dimensionlesstrajectory arc infinitesimal d(119904) using the following deriva-tion form
V = V sdot V1015840 Δ = V sdot Δ1015840
Δ = V2 sdot Δ10158401015840 minus V2 sdot Δ1015840 (119887119909+
119892 sin 120579V2
)
(16)
The factors V2 and V in (17) are eliminated by importingthe above relationships and (17) can be linearized as (18)
Δ + (119896119911119911+ 119887119910minus 119894
119862 120574
119860V) VΔ minus [119896
119911+ 119894
119862 120574
119860V(119887119910minus
119860
119862
119896119910)] V2Δ
= minus120579 minus
120579V(119896119911119911minus 119894
119862 120574
119860V)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)119865119888119890119894120574119888
(17)
Δ10158401015840+ (119867 minus 119894119875)Δ
1015840minus (119872 + 119894119875119879)Δ
= minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
(18)
where 119867 = 119896119911119911+ 119887119910minus 119887119909minus 119892 sin 120579V2119875 = 119862 120574119860V 119872 = 119896
119911
and 119879 = 119887119910minus 119896119910119860119862
4 Analytical Solutions
41 Complex AOAI Solution To deduce the solution of linearnonhomogeneous differential equation (18) first we assumethe general solution form of homogeneous equation as
Δ = 11986211198901198971119904+ 11986221198901198972119904 (19)
where1198621and119862
2are indeterminate constants and 119897
1and 1198972are
eigenvalues of homogeneous equation hence the followingequations are set up
1198972
12+ (119867 minus 119894119875) 11989712
minus (119872 + 119894119875119879) = 0 (20a)
1198971+ 1198972= minus (119867 minus 119894119875) (20b)
1198971sdot 1198972= minus (119872 + 119894119875119879) (20c)
Differentiating (19) with respect to trajectory arc yields
Δ1015840= 1198621015840
1(119904) 1198901198971119904+ 1198621015840
2(119904) 1198901198972119904+ 11986211198972
11198901198971119904+ 11986221198972
21198901198972119904 (21)
Assuming 119862101584011198901198971119904+ 1198621015840
21198901198972119904= 0 and differentiating (21) with
respect to trajectory arc yield
Δ10158401015840= 1198621015840
1(119904) 1198971
1198901198971119904+ 1198621015840
2(119904) 1198972
1198901198972119904+ 11986211198972
11198901198971119904+ 11986221198972
21198901198972119904 (22)
Importing (19) (20a) (20b) (20c) (21) and (22) into (18)yields
1198621015840
111989711198901198971119904+ 1198621015840
211989721198901198972119904
= minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
(23)
Mathematical Problems in Engineering 5
Solution of simultaneous expressions equation (23) and1198621015840
11198901198971119904+ 1198621015840
21198901198972119904= 0 is written as
1198621015840
12(119904)
= plusmn
1
1198971minus 1198972
[minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
] 119890minus11989712119904
(24)
Then constants 1198621 1198622are determined by integrating (24)
Considering 120579
120579 variables the integrating result is expressed
as
11986212 (
119904)
= plusmn
1
1198971minus 1198972
[
120579
V211989712
+
120579
V211989712
2(119896119911119911minus 119894119875) +
120579
V11989712
times (119896119911119911minus 119894119875)] 119890
minus11989712119904
∓ (
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
times
119865119888
119898V211989712
119890minus11989712119904+119894120574119888
(25)
Finally importing (20b) (20c) and (25) into (19) yieldsthe particular solution of the complex angular motion as
Δ =1
119872 + 119894119875119879
[
120579
V2+
120579
V(119896119911119911minus 119894119875)] +
119896119911119911minus 119894119875
V2times
119867 minus 119894119875
119872 + 119894119875119879
120579
minus
1
119872 + 119894119875119879
(
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
119865119888
119898V2119890119894120574119888
(26)
The trim angle inducing by the canard control force isindicated by the items containing parameter 119865
119888 By observing
right-hand items of particular solution the analytical expres-sion of complex AOAI induced by canard control force canbe extracted as
Δ119888= 1205751119888+ 1198941205752119888
= minus
1
119872 + 119894119875119879
(
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
119865119888
119898V2119890119894120574119888
(27)
Transforming the denominator into real numbers and omit-ting small magnitude values (27) is expressed in a short formas
1205751119888= [1198701cos 120574119888minus 1198702sin 120574119888]
119865119888
119898V2 (28a)
1205752119888= [1198702cos 120574119888+ 1198701sin 120574119888]
119865119888
119898V2 (28b)
where
1198701= minus
1198981198830
119872119860
minus
V119872V2
minus
1198752119879
1198722 (29a)
1198702=
1198981198830119875119879
1198722119860
+
V1198751198791198722V2
+
119875
119872
(29b)
42 Complex TARI Solution The frozen coefficientmethod isadopted to deduce analytical solutions of trajectory parame-ter increment in swervingmotionThe angular rate of velocityvector in VRF is expressed as trajectory path angular ratein plane 119900-119909
2-1199102and deflection angular rate in plane 119900-119909
2-
1199112 The trajectory angular rate increment (TARI) indicates
the orientation of velocity vector rotation The differentialequations of trajectory angular rate with canard controlforce refer to (9) and (10) trajectory angular rate increment(TARI) for canard control force is obtained by subtracting thedifferential equation of trajectory angular rate without canardcontrol force For brevity result is written as
[
120579119886119888
2119888
] = [
1205751119888
1205752119888
] 119887119910V + [
1205752119888
minus1205751119888
] 119887119911V + [
cos 120574119888
sin 120574119888
] sdot
119865119888
119898V (30)
According to the main principle of frozen coefficientmethod slowly varying trajectory parameters are consideredas constants in a short time such as the total velocity dynamicpressure and aerodynamic coefficients Submitting complexAOAI analytical solutions 120575
1119888 1205752119888to (30) yields
[
120579119886119888
2119888
] = [
1198721cos 120574119888+1198722sin 120574119888
minus1198722cos 120574119888+1198721sin 120574119888
] sdot
119865119888
119898V (31a)
1198721= 1198871199101198701+ 1198871199111198702+ 1 (31b)
1198722= 1198871199111198701minus 1198871199101198702 (31c)
43 Increment Orientations Differential equation of masscenter swerving motion with canard control force referringto (4) is written as
119910 = cos (1205952+ Δ119905 sdot
2119888) sin (120579
119886+ Δ119905 sdot
120579119886119888) sdot V (32a)
= sin (1205952+ Δ119905 sdot
2119888) sdot V (32b)
Assuming that the short time is Δ119905 sin( 120579119886sdot Δ119905) asymp
120579119886sdot Δ119905
sin(2sdot Δ119905) asymp
2sdot Δ119905 cos( 120579
119886sdot Δ119905) asymp 1 and cos(
2sdot Δ119905) asymp 1
Subtracting (32a) and (32b) with differential equation ofmass center swerving motion without canard control forceprojectile swerving increment induced by the canard controlforce in short time Δ119905 is obtained as
119910119888= (cos120595
2cos 120579119886sdot120579119886119888minus sin120595
2sin 120579119886sdot 2119888
minus cos 120579119886sin1205952sdot120579119886119888sdot 2119888sdot Δ119905) sdot V sdot Δ1199052
(33a)
119911119888= cos120595
2sdot 2119888sdot V sdot Δ1199052 (33b)
6 Mathematical Problems in Engineering
Vminus
V+
ΔV
120578
120595minus2
120595+2
120579minusa
120601TARI
120579+a
120577
120601SWER
yc
zcz
y
(yminus zminus)
(y+ z+)
Figure 6 Rear view of the projectile definition of 120601TARI 120601SWER ldquominusrdquo means uncontrolled state ldquo+rdquo means controlled state The positive 120585 and119909 point into the page
Table 1 Parameters involved in analytical expressions
Constantcoefficient
Variablecoefficient
Trajectoryparameters Control input
119898 1198830
V
119865119888
119860 119896119911
120579119886
119862 119887119909
1205952
119892 119887119910
120574
Δ119905 119896119910 V
Simple algebraic manipulation yields the analyticalexpressions of orientations of TARI and swerving incrementshown in Figure 6
120601TARI = tanminus1 (2119888
120579119886119888
) 2119888le 0
120601TARI = tanminus1 (2119888
120579119886119888
) + 180 2119888gt 0
(34a)
120601SWER = tanminus1 (119911119888
119910119888
) 119911119888le 0
120601SWER = tanminus1 (119911119888
119910119888
) + 180 119911119888gt 0
(34b)
All parameters involved in analytical expressions arelisted in Table 1 Real-time performance of analytical solu-tions is ensured by the variable coefficients which areupdated with the trajectory parameters and aerodynamiccoefficients during the flight Combining with the trajectoryparameters and constant coefficients the orientations ofTARI and swerving increment with canard control input canbe predicted Note that the flying stability of the projectileshould exist
5 Simulation Results
In this chapter numerical simulations of projectile 6-DOFrigid motions with and without canard control were imple-mented Numerical solutions of trajectory parameter incre-ments are obtained by subtraction operation Meanwhile
Table 2 Projectile physical properties
119898 (kg) 119883119888(m) 119862 119860 119871 (m) 119863 (m)
45 0343 016 18 09 0155
Table 3 Initial launch conditions
Launch conditions Meteorological conditionsVelocity 930ms Ground pressure 1000 hPaElevation 50 deg Virtual temperature 2889Direction 0 deg Longitudinal wind 0msSpin rate 1800 rads Lateral wind 0ms
analytical solutions of TARI and swerving increment arecalculated by equations in the above section and orientationdeviations are analyzed by comparing with the numericalsolutions
51 Simulation Configurations Projectile physical propertiesreferring to the actual parameters are listed in Table 2 andthe initial launch conditions are listed in Table 3 The fourth-order Runge-Kutta method is employed in the numericalsimulations and the step-size is 000001 s
Projectile aerodynamic coefficients are obtained by aseries of computational fluid dynamics simulations previ-ously All coefficients are expressed as function of Machnumber shown in Figure 7 The numerical unguided 6-DOFrigid trajectory result is in good agreement with the firingtable data of the conventional 155mm spin-stabilized projec-tile
52 Numerical Trajectory Results Trajectory simulations of155mm spin-stabilized projectile with and without canardcontrol force are implemented under the same initial condi-tions Control period is set as the duration from apogee point(50 sec) to impact point and the canard rolling-angle 120574
119888is set
as 0 degFigure 8 shows the results of trajectory numerical simu-
lations Impact point drift of controlled trajectory indicates(Δ119909 Δ119911) = (1320m 753m) and the impact point drift
Mathematical Problems in Engineering 7
00 05 10 15 20 25 30 350
1
2
3
4
5
6
7
Mach number
Stat
ic ae
rody
nam
ic co
effici
ent
cy998400
mz998400
cx998400
(a) Static aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
0
10
20
Mach number
cz998400
mzz998400
mxz998400
my998400
Stat
ic ae
rody
nam
ic co
effici
ent
(b) Dynamic aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
000
001
Mach number
Cana
rd effi
cien
cy co
effici
ent
minus006
minus005
minus004
minus003
minus002
minus001
cpdmpd
ccdmcd
(c) Canard efficiency coefficients versus Mach number
00 05 10 15 20 25 30 35295
300
305
310
315
320
325
330
335
340
Mach number
Cen
ter o
f can
ard
pres
sure
coeffi
cien
t
X0
(d) Canard pressure center coefficient versus Mach number
Figure 7 Aerodynamic coefficients adopted in 6-DOF mathematical model
orientation indicates 297 deg Inconsistency can be seen fromthe impact point drift orientation and canard rolling angle
One of the influence factors is the nonconcentratedcontrol force orientation caused by the gyroscopic effectwhich can be reflected by the angularmotion of the projectileHowever the angular motion around the center of mass isindicated by the AOAI and the angular motion of velocityvector is indicated by the TARI To observe these angularmotions 3D curves of complex AOAI and TARI with timehistory are shown in Figures 9 and 10
Damped oscillation waves can be seen in numericalsolutions of complex AOAI and TARI with similar frequencyAccording to the control system stability criterion the angu-lar motions converge to steady state at about 20 sec aftercanard control started Therefore the adoptive prediction
orientations should be steady state value or trim value of theoscillation process
53 Analytical Angular Motion Results Combining with theknown meteorological parameters aerodynamic coefficientand rolling-angle 120574
119888 analytical solution of the AOAI is cal-
culated via (28a) and (28b) by using the controlled trajectoryparameters Moreover analytical solution of TARI is calcu-lated by (31a) (31b) and (31c) For the convenience of orienta-tion observation projection of analytical and numerical com-plex AOAI and TARI in plane of 119900-120578-120577 and 119900-119910
2-1199112is shown
in Figures 11 and 12 Due to the approximate process forthe deduction of analytical expression magnitude deviationcan be seen from the comparison However our attention isconcentrated in the orientation prediction By comparing
8 Mathematical Problems in Engineering
01
23
05001000150020000
5000
10000
15000
Hei
ght (
m)
Apogee point
Controlled IPP (298658 16404)
Uncontrolled IPP(296811 15548)
Launch point times104
Cross-range (m) Range (m)
Controlled trajectoryUncontrolled trajectory
Figure 8 Projectile 3D trajectory comparison
50 60 70 80 90 100 1100
Time (s)
Angle of slip side (deg)
Ang
le o
f in
cide
nce (
deg)
minus1
minus05
05minus05
0
05
1 70 s
Figure 9 3D curve of complex AOAI with time history
50 60 70 80 90 100 1100
002004
0
002
004
006
Time (s)
Deflection angular
rate (degs)
Tilt
angu
lar r
ate (
deg
s)
minus004minus002
minus002
70 s
Figure 10 3D curve of complex TARI with time history
the orientations of analytical solutions with numerical steadystate value well agreement can be seen in this case andanalytical orientations indicate the trim value of numericalorientations To discuss general applicability of analyticalorientation expressions for TARI and swerving incrementmore simulations are implemented in the following section
00 02 04 06
00
04
08
12
Numerical solutionAnalytical solution
minus06 minus04 minus02
1205752c (rad)
1205751c
(rad
)Figure 11 Projection of complex AOAI in plane of 119900-120578-120577
000 002 004 006
000
002
004
006
Analytical solutionNumerical solution
minus002minus002
120579a
(rad
s)
1205952 (rads)
Figure 12 Projection of complex TARI in plane of 119900-1199102-1199112
54 Orientation Prediction Under different conditions ana-lytical and numerical orientations of TARI and swervingincrement were calculated The start time of control periodis set at the apogee point 15 s later and 30 s later The initialelevations are set as 50 deg 40 deg and 30 deg The numer-ical and analytical orientations of TARI and swerving incre-ment are drawn in Figures 13 14 and 15
As seen from the left side figures analytical TARI orienta-tions are not affected by initial elevation and control start timeand appear as trim value of numerical orientations Considerthat the deviations between numerical and analytical orienta-tions achieve steady state when the amplitude of oscillation is
Mathematical Problems in Engineering 9
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
7 s10 sStart time 80 sStart time 65 s
Start time 50 s
16 s
120601TA
RI(r
ad)
(a) TARI orientation
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
Start time 80 sStart time 65 sStart time 50 s
3s7 s12 s
120601SW
ER(r
ad)
(b) Swerving increment orientation
Figure 13 Numerical and analytical results under initial elevation 50 deg
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601TA
RI(r
ad)
45 sStart time 67 s
7 s
Start time 37 sStart time 52 s
12 s
Numerical solutionAnalytical solution
(a) TARI orientation
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 67 sStart time 37 s Start time 52 s
2 s4 s5 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 14 Numerical and analytical results under initial elevation 40 deg
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601TA
RI(r
ad)
6 s Start time 59 s
Start time 44 s
6 s
Start time 29 s
7 s
Numerical solutionAnalytical solution
(a) TARI orientation
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 59 sStart time 44 sStart time 29 s
2 s3 s3 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 15 Numerical and analytical results under initial elevation 30 deg
less than 10 deg Convergence time for the deviation reachingsteady state is recorded For each initial elevation closercontrol start time to the end of flight costs less convergencetime and for different initial elevations lower initial elevationangle costs less convergence time
As seen from the right side figures no oscillation processis indicated from the deviation between numerical and ana-lytical swerving increment orientations The deviations arefirstly decreased during the beginning of control period and
then negative deviations increased and time durations for thedeviations decreasing to less than 10 deg are recorded Simi-lar law can be seen from the recorded orientation deviationdecreasing time of TARI and swerving increment and theswerving increment orientation deviations are converged in ashorter time than the TARI orientation deviations under thesame initial elevation It is worth noting that at the start timeof 59 sec in Figure 15 the numerical TARI orientation reachesthe critical divergence state and the analytical orientation still
10 Mathematical Problems in Engineering
represents trim value of the oscillation processMoreover theanalytical and numerical solution of swerving orientationsshows little affection by the critical divergence state of TARI
6 Conclusions
This paper focuses on the swerving orientation prediction forthe square crossing fixed-cant canard configuration Analyt-ical expressions of TARI and swerving increment orientationare deduced without the attitude information Based on thesimulations under different initial elevation and control timeconditions the following conclusions can be obtained
(1) Analytical orientations of TARI and swerving incre-ment indicate the trim value of the numerical orien-tations Deviations between numerical and analyticalorientations converge in period of time after controlstarted
(2) For each initial elevation closer control start timesto the end of flight cost less convergence time Fordifferent initial elevations lower initial elevation costsless convergence time
(3) Based on the target trajectory angular rate orientationor target swerving orientation provided by navigationsystem the desired rolling angle of canard frame canbe determined by the reverse solution of incrementorientation analytical expressions By setting appro-priate control start time and duration cost-effectiveguidance strategy involving no empirical formula forfixed-cant canard configurationwill be accomplished
Appendix
Force and Moment Expressions
The direction of drag vector points at the negative 1199092 in the
VRF the expression of R119909can be written as
R119909=[
[
[
minus1
0
0
]
]
]
sdot 119876V2119888119909 (A1)
Lift vector was obtained by transforming the normal force inthe NRRF and the short form of R
119910is
R119910=[
[
[
cos 1205752cos 1205751minus 1
cos 1205752sin 1205751
sin 1205752
]
]
]
sdot 119876V21198881015840119910 (A2)
Direction of the Magnus force vector points at the directionof k times 120585 and the expression of R
119911is
R119911=[
[
[
0
sin 1205752
minus cos 1205752sin 1205751
]
]
]
sdot 119876V21198881015840119911 (A3)
Expression of the gravity vector in the VRF can be written as
G =[
[
[
sin 120579119886cos1205952
cos 120579119886
sin 120579119886sin1205952
]
]
]
sdot 119898119892 (A4)
Static moment vector points at the direction of k times 120585 and theexpression ofM
119911can be obtained as
M119911=[
[
[
0
minus sin 1205751sin120573 + sin 120575
2cos 1205751cos120573
sin 1205751
]
]
]
119876119897V21198981015840 (A5)
Transverse damping moment vector points at the oppositedirection of the NRRF spin-rate vector 120596
1 which can be
written as
M119911119911=
[
[
[
[
0
minus120596120578
minus120596120577
]
]
]
]
119876119897119889V1198981015840119911119911 (A6)
The axial damping moment vector in the NRRF is written as
M119909119911=[
[
[
1
0
0
]
]
]
sdot 119876119897119889V1205961205851198981015840
119909119911 (A7)
Magnus moment vector is induced by the Magnus forcepointing at the plane of AOA and M
119910points at direction of
120585 times (120585 times k) and is expressed as
M119910=[
[
[
0
sin 1205751cos120573 + sin 120575
2cos 1205751sin120573
sin 1205752cos 1205751
]
]
]
119876119897119889120596120585V11989810158401015840119910
(A8)
Canard forces 119865119901119889 119865119888119889
depending on steering canards anddifferential canard are expressed as
119865119901119889= 119876V2119888
119901119889
119865119888119889= 119876V2119888
119888119889
(A9)
Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
vector R119909 lift vector R
119910 Magnus vector R
119911 gravity vector
G and canard control force vector F119888 Equation (1) can be
expanded as
119898(
120597k120597119905
+Ω[2minus119873]
times k) = R119909+ R119910+ R119911+ G + F
119888 (2)
where 120597k120597119905means the differential form of velocity vector inthe VRF
Besides the equations of mass center motion are estab-lished in the IRF as
d119909d119905
= V cos1205952cos 120579119886
d119910d119905
= V cos1205952sin 120579119886
d119911d119905
= V sin1205952
(3)
According to the theorem of momentum momentaroundmass center motion of the projectile can be expressedas
dGd119905
= M (4)
The total momentum moment vector is composed ofmomentum moment vector G in the NRRF and transportmomentummoment vector induced by rotation of theNRRFThe NRRF spin-rate vector is expressed as 120596
1 The momen-
tummoment vector is expressed asG = J119860sdot120596 where J
119860means
the inertia matrix and120596means the Euler angular rate matrixThe total external moment vector projectile bearing in theNRRF is composed of the roll damping moment vectorM
119909119911
staticmoment vectorM119911 pitch dampingmoment vectorM
119911119911
Magnus moment vector My and canard inducing controlmoment vectorM
119888 Equation (4) can be expanded as
120597G120597119905
+ 1205961times G = M
119911+M119910+M119909119911+M119911119911+M119888 (5)
where 120597G120597119905 means the differential form of the momentummoment vector in the NRRFThe aroundmass center angularmotion differential equations can be obtained by integratingexpanded form of (5) For brevity detailed expressions offorce and moment are listed in the appendix
22 Canard Force and Moment Canard control force vectoris considered sum of aerodynamic force induced by the fourwings Force vector provided by differential canards 1 and 3in the CRF is indicated as F
119888119889with orientation vertical to
rolling angle and magnitude 119865119888119889 force vector provided by
steering canards 2 and 4 in the CRF is indicated as F119901119889
withorientation parallel to rolling angle and magnitude 119865
119901119889
Expression of canard force vector F119888in the VRF can be
obtained by reference frame transforming
F119888= Ω[120585minus2]
sdotΩ[120585119888minus120585]
sdot (F119888119889+ F119901119889)
=[
[
[
cos 1205752cos 1205751
cos 1205752cos 1205751
sin 1205752
minus sin 1205751
cos 1205751
0
minus sin 1205752cos 1205751minus sin 120575
2sin 1205751cos 1205752
]
]
]
sdot([
[
[
0
minus sin 120574119888119865119888119889
cos 120574119888119865119888119889
]
]
]
+
[
[
[
[
0
cos 120574119888119865119901119889
sin 120574119888119865119901119889
]
]
]
]
)
(6)
where Ω[120585minus2]
means transforming matrix from the NRRF toVRF andΩ
[120585119888minus120585]means transforming vector from the CRF to
NRRFCanard control moment vector M
119888in the NRRF is
considered sumofmoment vectorM119888119889by differential canards
1 and 3 andM119901119889
by steering canards 2 and 4 as
M119888= M119888119889+M119901119889=[
[
[
0
sin 120574119888119872119888119889
cos 120574119888119872119888119889
]
]
]
+
[
[
[
[
0
cos 120574119888119872119901119889
minus sin 120574119888119872119901119889
]
]
]
]
(7)
According to the relationship between force and moment119872119888119889= 119865119888119889times1198830and119872
119901119889= 119865119901119889times1198830 where119883
0means the axial
distance between mass center and pressure center of canardframe
In this section models of projectile flight motion andcanard control force and moment for numerical solution ofswerving motion are established Note that some small mag-nitude aerodynamic forces are ignored such as drag force androll damping moment brought to the projectile main bodyby the canard frame Moreover aerodynamic force yieldedby canard 1 shows similar magnitude and opposite directionwith force yielded by canard 3 hence the balance forceand moment of them 119865
119888119889 119872119888119889
can be neglected to simplifythe deduce process of analytical swerving motion expres-sions
3 Angular Motion Linearization
In the 6-DOF mathematical model angular motions in masscenter and around mass center motions are highly coupledTo linearize the angular motion 6-DOF model is processedwith the following assumptions
(a) ignore the products of small magnitude values andhigh order of them
(b) ignore the asymmetric of the projectile geometricparameters and eccentricity of mass center
(c) consider the AOA small magnitude values andassume the following approximation
sin 1205751asymp 1205751 sin 120575
2asymp 1205752
cos 1205751asymp 1 cos 120575
2asymp 1
120573 asymp 0 1205751asymp 120601119886minus 120579119886 120575
2asymp 1206012minus 1205952
(8)
4 Mathematical Problems in Engineering
(d) ignore the drag force 119865119909119888
and roll damping moment119872120585119888induced by fixed-cant canard frame
(e) ignore the 119865119888119889and119872
119888119889yielded by differential canards
1 and 3 assume the magnitude approximation 119865119888asymp
119865119901119889119872119888asymp 119865119901119889times 1198830
Then (2) and (5) are expanded and simplified by theabove rules Differential equations of trajectory path anddeflection angle and second-order differential equations ofpitch and yaw angle are obtained as follows
120579119886=
(119876V211988810158401199101205751+ 119876V21198881015840
1199111205752minus 119898119892 cos 120579
119886+ cos 120574
119888119865119888)
119898V
(9)
2=
(119876V211988810158401199101205752minus 119876V21198881015840
1199111205751+ 119898119892 sin 120579
119886sin1205952+ sin 120574
119888119865119888)
119898V
(10)
119886= (minus119876119897V21198981015840
1199111205751minus 119876119897119889V120596
1205771198981015840
119911119911minus 119876119897119889120596
120585V119898101584010158401199101205752
+119862120596120585120596120578+ 120596120578120596120577tan1206012+ 1198830cos 120574119888119865119888) (119860)minus1
(11)
2= (119876119897V21198981015840
1199111205752+ 119876119897119889V120596
1205781198981015840
119911119911minus 119876119897119889120596
120585V119898101584010158401199101205751
+119862120596120585120596120577minus 120596120578
2 tan1206012+ 1198830sin 120574119888119865119888) (119860)minus1
(12)
The complex trajectory angle differential equation is obtainedby adding (9) with (10) multiplied by imaginary unit 119894 as
Ψ = (119887119910V minus 119894119887119911120574)Δ +
119865119888
119898V119890119894120574119888
(13)
where 119887119910= 119876V1198881015840
119910119898 119887119911= 119876V1198881015840
119911119898 119890119894120574119888 = cos 120574
119888+ 119894 sin 120574
119888
Ψ = 120579119886+ 1198941205952 Δ = 120575
1+ 1198941205752 Differentiating (13) with respect
to time yields
Ψ = (119887119910V minus 119894119887119911120574)Δ + (119887
119910V minus 119894119887119911120574) Δ minus
V119865119888
119898V2119890119894120574119888
(14)
Meanwhile complex Euler angle differential equation isobtained by adding (11) with (12) multiplied by ndash119894 as
Φ + (119896119911119911V minus 119894
119862
119860
120574) Φ = (119896119911V2 + 119896
119910V)Δ +
1198830
119860
119865119888119890119894120574119888
(15)
where 119896119911= 119876119897119898
1015840
119911119860 119896119911119911= 11987611989721198981015840
119911119911119860 119896119910= 119876119897119889119896
10158401015840
119910119860 Φ =
120593119886+ 1198941205932
Consider the relationships between trajectory angleEuler angle and angle of attack Φ = Ψ + Δ Φ = Ψ + ΔComplex angle of attack (AOA) motion can be obtained byimporting (13) and (14) into (15) The expression of complexAOA differential equation is shown as in formula (17)
In order to linearize the complex AOA differential equa-tion time infinitesimal d(119905) is substituted by dimensionlesstrajectory arc infinitesimal d(119904) using the following deriva-tion form
V = V sdot V1015840 Δ = V sdot Δ1015840
Δ = V2 sdot Δ10158401015840 minus V2 sdot Δ1015840 (119887119909+
119892 sin 120579V2
)
(16)
The factors V2 and V in (17) are eliminated by importingthe above relationships and (17) can be linearized as (18)
Δ + (119896119911119911+ 119887119910minus 119894
119862 120574
119860V) VΔ minus [119896
119911+ 119894
119862 120574
119860V(119887119910minus
119860
119862
119896119910)] V2Δ
= minus120579 minus
120579V(119896119911119911minus 119894
119862 120574
119860V)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)119865119888119890119894120574119888
(17)
Δ10158401015840+ (119867 minus 119894119875)Δ
1015840minus (119872 + 119894119875119879)Δ
= minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
(18)
where 119867 = 119896119911119911+ 119887119910minus 119887119909minus 119892 sin 120579V2119875 = 119862 120574119860V 119872 = 119896
119911
and 119879 = 119887119910minus 119896119910119860119862
4 Analytical Solutions
41 Complex AOAI Solution To deduce the solution of linearnonhomogeneous differential equation (18) first we assumethe general solution form of homogeneous equation as
Δ = 11986211198901198971119904+ 11986221198901198972119904 (19)
where1198621and119862
2are indeterminate constants and 119897
1and 1198972are
eigenvalues of homogeneous equation hence the followingequations are set up
1198972
12+ (119867 minus 119894119875) 11989712
minus (119872 + 119894119875119879) = 0 (20a)
1198971+ 1198972= minus (119867 minus 119894119875) (20b)
1198971sdot 1198972= minus (119872 + 119894119875119879) (20c)
Differentiating (19) with respect to trajectory arc yields
Δ1015840= 1198621015840
1(119904) 1198901198971119904+ 1198621015840
2(119904) 1198901198972119904+ 11986211198972
11198901198971119904+ 11986221198972
21198901198972119904 (21)
Assuming 119862101584011198901198971119904+ 1198621015840
21198901198972119904= 0 and differentiating (21) with
respect to trajectory arc yield
Δ10158401015840= 1198621015840
1(119904) 1198971
1198901198971119904+ 1198621015840
2(119904) 1198972
1198901198972119904+ 11986211198972
11198901198971119904+ 11986221198972
21198901198972119904 (22)
Importing (19) (20a) (20b) (20c) (21) and (22) into (18)yields
1198621015840
111989711198901198971119904+ 1198621015840
211989721198901198972119904
= minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
(23)
Mathematical Problems in Engineering 5
Solution of simultaneous expressions equation (23) and1198621015840
11198901198971119904+ 1198621015840
21198901198972119904= 0 is written as
1198621015840
12(119904)
= plusmn
1
1198971minus 1198972
[minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
] 119890minus11989712119904
(24)
Then constants 1198621 1198622are determined by integrating (24)
Considering 120579
120579 variables the integrating result is expressed
as
11986212 (
119904)
= plusmn
1
1198971minus 1198972
[
120579
V211989712
+
120579
V211989712
2(119896119911119911minus 119894119875) +
120579
V11989712
times (119896119911119911minus 119894119875)] 119890
minus11989712119904
∓ (
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
times
119865119888
119898V211989712
119890minus11989712119904+119894120574119888
(25)
Finally importing (20b) (20c) and (25) into (19) yieldsthe particular solution of the complex angular motion as
Δ =1
119872 + 119894119875119879
[
120579
V2+
120579
V(119896119911119911minus 119894119875)] +
119896119911119911minus 119894119875
V2times
119867 minus 119894119875
119872 + 119894119875119879
120579
minus
1
119872 + 119894119875119879
(
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
119865119888
119898V2119890119894120574119888
(26)
The trim angle inducing by the canard control force isindicated by the items containing parameter 119865
119888 By observing
right-hand items of particular solution the analytical expres-sion of complex AOAI induced by canard control force canbe extracted as
Δ119888= 1205751119888+ 1198941205752119888
= minus
1
119872 + 119894119875119879
(
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
119865119888
119898V2119890119894120574119888
(27)
Transforming the denominator into real numbers and omit-ting small magnitude values (27) is expressed in a short formas
1205751119888= [1198701cos 120574119888minus 1198702sin 120574119888]
119865119888
119898V2 (28a)
1205752119888= [1198702cos 120574119888+ 1198701sin 120574119888]
119865119888
119898V2 (28b)
where
1198701= minus
1198981198830
119872119860
minus
V119872V2
minus
1198752119879
1198722 (29a)
1198702=
1198981198830119875119879
1198722119860
+
V1198751198791198722V2
+
119875
119872
(29b)
42 Complex TARI Solution The frozen coefficientmethod isadopted to deduce analytical solutions of trajectory parame-ter increment in swervingmotionThe angular rate of velocityvector in VRF is expressed as trajectory path angular ratein plane 119900-119909
2-1199102and deflection angular rate in plane 119900-119909
2-
1199112 The trajectory angular rate increment (TARI) indicates
the orientation of velocity vector rotation The differentialequations of trajectory angular rate with canard controlforce refer to (9) and (10) trajectory angular rate increment(TARI) for canard control force is obtained by subtracting thedifferential equation of trajectory angular rate without canardcontrol force For brevity result is written as
[
120579119886119888
2119888
] = [
1205751119888
1205752119888
] 119887119910V + [
1205752119888
minus1205751119888
] 119887119911V + [
cos 120574119888
sin 120574119888
] sdot
119865119888
119898V (30)
According to the main principle of frozen coefficientmethod slowly varying trajectory parameters are consideredas constants in a short time such as the total velocity dynamicpressure and aerodynamic coefficients Submitting complexAOAI analytical solutions 120575
1119888 1205752119888to (30) yields
[
120579119886119888
2119888
] = [
1198721cos 120574119888+1198722sin 120574119888
minus1198722cos 120574119888+1198721sin 120574119888
] sdot
119865119888
119898V (31a)
1198721= 1198871199101198701+ 1198871199111198702+ 1 (31b)
1198722= 1198871199111198701minus 1198871199101198702 (31c)
43 Increment Orientations Differential equation of masscenter swerving motion with canard control force referringto (4) is written as
119910 = cos (1205952+ Δ119905 sdot
2119888) sin (120579
119886+ Δ119905 sdot
120579119886119888) sdot V (32a)
= sin (1205952+ Δ119905 sdot
2119888) sdot V (32b)
Assuming that the short time is Δ119905 sin( 120579119886sdot Δ119905) asymp
120579119886sdot Δ119905
sin(2sdot Δ119905) asymp
2sdot Δ119905 cos( 120579
119886sdot Δ119905) asymp 1 and cos(
2sdot Δ119905) asymp 1
Subtracting (32a) and (32b) with differential equation ofmass center swerving motion without canard control forceprojectile swerving increment induced by the canard controlforce in short time Δ119905 is obtained as
119910119888= (cos120595
2cos 120579119886sdot120579119886119888minus sin120595
2sin 120579119886sdot 2119888
minus cos 120579119886sin1205952sdot120579119886119888sdot 2119888sdot Δ119905) sdot V sdot Δ1199052
(33a)
119911119888= cos120595
2sdot 2119888sdot V sdot Δ1199052 (33b)
6 Mathematical Problems in Engineering
Vminus
V+
ΔV
120578
120595minus2
120595+2
120579minusa
120601TARI
120579+a
120577
120601SWER
yc
zcz
y
(yminus zminus)
(y+ z+)
Figure 6 Rear view of the projectile definition of 120601TARI 120601SWER ldquominusrdquo means uncontrolled state ldquo+rdquo means controlled state The positive 120585 and119909 point into the page
Table 1 Parameters involved in analytical expressions
Constantcoefficient
Variablecoefficient
Trajectoryparameters Control input
119898 1198830
V
119865119888
119860 119896119911
120579119886
119862 119887119909
1205952
119892 119887119910
120574
Δ119905 119896119910 V
Simple algebraic manipulation yields the analyticalexpressions of orientations of TARI and swerving incrementshown in Figure 6
120601TARI = tanminus1 (2119888
120579119886119888
) 2119888le 0
120601TARI = tanminus1 (2119888
120579119886119888
) + 180 2119888gt 0
(34a)
120601SWER = tanminus1 (119911119888
119910119888
) 119911119888le 0
120601SWER = tanminus1 (119911119888
119910119888
) + 180 119911119888gt 0
(34b)
All parameters involved in analytical expressions arelisted in Table 1 Real-time performance of analytical solu-tions is ensured by the variable coefficients which areupdated with the trajectory parameters and aerodynamiccoefficients during the flight Combining with the trajectoryparameters and constant coefficients the orientations ofTARI and swerving increment with canard control input canbe predicted Note that the flying stability of the projectileshould exist
5 Simulation Results
In this chapter numerical simulations of projectile 6-DOFrigid motions with and without canard control were imple-mented Numerical solutions of trajectory parameter incre-ments are obtained by subtraction operation Meanwhile
Table 2 Projectile physical properties
119898 (kg) 119883119888(m) 119862 119860 119871 (m) 119863 (m)
45 0343 016 18 09 0155
Table 3 Initial launch conditions
Launch conditions Meteorological conditionsVelocity 930ms Ground pressure 1000 hPaElevation 50 deg Virtual temperature 2889Direction 0 deg Longitudinal wind 0msSpin rate 1800 rads Lateral wind 0ms
analytical solutions of TARI and swerving increment arecalculated by equations in the above section and orientationdeviations are analyzed by comparing with the numericalsolutions
51 Simulation Configurations Projectile physical propertiesreferring to the actual parameters are listed in Table 2 andthe initial launch conditions are listed in Table 3 The fourth-order Runge-Kutta method is employed in the numericalsimulations and the step-size is 000001 s
Projectile aerodynamic coefficients are obtained by aseries of computational fluid dynamics simulations previ-ously All coefficients are expressed as function of Machnumber shown in Figure 7 The numerical unguided 6-DOFrigid trajectory result is in good agreement with the firingtable data of the conventional 155mm spin-stabilized projec-tile
52 Numerical Trajectory Results Trajectory simulations of155mm spin-stabilized projectile with and without canardcontrol force are implemented under the same initial condi-tions Control period is set as the duration from apogee point(50 sec) to impact point and the canard rolling-angle 120574
119888is set
as 0 degFigure 8 shows the results of trajectory numerical simu-
lations Impact point drift of controlled trajectory indicates(Δ119909 Δ119911) = (1320m 753m) and the impact point drift
Mathematical Problems in Engineering 7
00 05 10 15 20 25 30 350
1
2
3
4
5
6
7
Mach number
Stat
ic ae
rody
nam
ic co
effici
ent
cy998400
mz998400
cx998400
(a) Static aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
0
10
20
Mach number
cz998400
mzz998400
mxz998400
my998400
Stat
ic ae
rody
nam
ic co
effici
ent
(b) Dynamic aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
000
001
Mach number
Cana
rd effi
cien
cy co
effici
ent
minus006
minus005
minus004
minus003
minus002
minus001
cpdmpd
ccdmcd
(c) Canard efficiency coefficients versus Mach number
00 05 10 15 20 25 30 35295
300
305
310
315
320
325
330
335
340
Mach number
Cen
ter o
f can
ard
pres
sure
coeffi
cien
t
X0
(d) Canard pressure center coefficient versus Mach number
Figure 7 Aerodynamic coefficients adopted in 6-DOF mathematical model
orientation indicates 297 deg Inconsistency can be seen fromthe impact point drift orientation and canard rolling angle
One of the influence factors is the nonconcentratedcontrol force orientation caused by the gyroscopic effectwhich can be reflected by the angularmotion of the projectileHowever the angular motion around the center of mass isindicated by the AOAI and the angular motion of velocityvector is indicated by the TARI To observe these angularmotions 3D curves of complex AOAI and TARI with timehistory are shown in Figures 9 and 10
Damped oscillation waves can be seen in numericalsolutions of complex AOAI and TARI with similar frequencyAccording to the control system stability criterion the angu-lar motions converge to steady state at about 20 sec aftercanard control started Therefore the adoptive prediction
orientations should be steady state value or trim value of theoscillation process
53 Analytical Angular Motion Results Combining with theknown meteorological parameters aerodynamic coefficientand rolling-angle 120574
119888 analytical solution of the AOAI is cal-
culated via (28a) and (28b) by using the controlled trajectoryparameters Moreover analytical solution of TARI is calcu-lated by (31a) (31b) and (31c) For the convenience of orienta-tion observation projection of analytical and numerical com-plex AOAI and TARI in plane of 119900-120578-120577 and 119900-119910
2-1199112is shown
in Figures 11 and 12 Due to the approximate process forthe deduction of analytical expression magnitude deviationcan be seen from the comparison However our attention isconcentrated in the orientation prediction By comparing
8 Mathematical Problems in Engineering
01
23
05001000150020000
5000
10000
15000
Hei
ght (
m)
Apogee point
Controlled IPP (298658 16404)
Uncontrolled IPP(296811 15548)
Launch point times104
Cross-range (m) Range (m)
Controlled trajectoryUncontrolled trajectory
Figure 8 Projectile 3D trajectory comparison
50 60 70 80 90 100 1100
Time (s)
Angle of slip side (deg)
Ang
le o
f in
cide
nce (
deg)
minus1
minus05
05minus05
0
05
1 70 s
Figure 9 3D curve of complex AOAI with time history
50 60 70 80 90 100 1100
002004
0
002
004
006
Time (s)
Deflection angular
rate (degs)
Tilt
angu
lar r
ate (
deg
s)
minus004minus002
minus002
70 s
Figure 10 3D curve of complex TARI with time history
the orientations of analytical solutions with numerical steadystate value well agreement can be seen in this case andanalytical orientations indicate the trim value of numericalorientations To discuss general applicability of analyticalorientation expressions for TARI and swerving incrementmore simulations are implemented in the following section
00 02 04 06
00
04
08
12
Numerical solutionAnalytical solution
minus06 minus04 minus02
1205752c (rad)
1205751c
(rad
)Figure 11 Projection of complex AOAI in plane of 119900-120578-120577
000 002 004 006
000
002
004
006
Analytical solutionNumerical solution
minus002minus002
120579a
(rad
s)
1205952 (rads)
Figure 12 Projection of complex TARI in plane of 119900-1199102-1199112
54 Orientation Prediction Under different conditions ana-lytical and numerical orientations of TARI and swervingincrement were calculated The start time of control periodis set at the apogee point 15 s later and 30 s later The initialelevations are set as 50 deg 40 deg and 30 deg The numer-ical and analytical orientations of TARI and swerving incre-ment are drawn in Figures 13 14 and 15
As seen from the left side figures analytical TARI orienta-tions are not affected by initial elevation and control start timeand appear as trim value of numerical orientations Considerthat the deviations between numerical and analytical orienta-tions achieve steady state when the amplitude of oscillation is
Mathematical Problems in Engineering 9
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
7 s10 sStart time 80 sStart time 65 s
Start time 50 s
16 s
120601TA
RI(r
ad)
(a) TARI orientation
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
Start time 80 sStart time 65 sStart time 50 s
3s7 s12 s
120601SW
ER(r
ad)
(b) Swerving increment orientation
Figure 13 Numerical and analytical results under initial elevation 50 deg
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601TA
RI(r
ad)
45 sStart time 67 s
7 s
Start time 37 sStart time 52 s
12 s
Numerical solutionAnalytical solution
(a) TARI orientation
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 67 sStart time 37 s Start time 52 s
2 s4 s5 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 14 Numerical and analytical results under initial elevation 40 deg
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601TA
RI(r
ad)
6 s Start time 59 s
Start time 44 s
6 s
Start time 29 s
7 s
Numerical solutionAnalytical solution
(a) TARI orientation
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 59 sStart time 44 sStart time 29 s
2 s3 s3 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 15 Numerical and analytical results under initial elevation 30 deg
less than 10 deg Convergence time for the deviation reachingsteady state is recorded For each initial elevation closercontrol start time to the end of flight costs less convergencetime and for different initial elevations lower initial elevationangle costs less convergence time
As seen from the right side figures no oscillation processis indicated from the deviation between numerical and ana-lytical swerving increment orientations The deviations arefirstly decreased during the beginning of control period and
then negative deviations increased and time durations for thedeviations decreasing to less than 10 deg are recorded Simi-lar law can be seen from the recorded orientation deviationdecreasing time of TARI and swerving increment and theswerving increment orientation deviations are converged in ashorter time than the TARI orientation deviations under thesame initial elevation It is worth noting that at the start timeof 59 sec in Figure 15 the numerical TARI orientation reachesthe critical divergence state and the analytical orientation still
10 Mathematical Problems in Engineering
represents trim value of the oscillation processMoreover theanalytical and numerical solution of swerving orientationsshows little affection by the critical divergence state of TARI
6 Conclusions
This paper focuses on the swerving orientation prediction forthe square crossing fixed-cant canard configuration Analyt-ical expressions of TARI and swerving increment orientationare deduced without the attitude information Based on thesimulations under different initial elevation and control timeconditions the following conclusions can be obtained
(1) Analytical orientations of TARI and swerving incre-ment indicate the trim value of the numerical orien-tations Deviations between numerical and analyticalorientations converge in period of time after controlstarted
(2) For each initial elevation closer control start timesto the end of flight cost less convergence time Fordifferent initial elevations lower initial elevation costsless convergence time
(3) Based on the target trajectory angular rate orientationor target swerving orientation provided by navigationsystem the desired rolling angle of canard frame canbe determined by the reverse solution of incrementorientation analytical expressions By setting appro-priate control start time and duration cost-effectiveguidance strategy involving no empirical formula forfixed-cant canard configurationwill be accomplished
Appendix
Force and Moment Expressions
The direction of drag vector points at the negative 1199092 in the
VRF the expression of R119909can be written as
R119909=[
[
[
minus1
0
0
]
]
]
sdot 119876V2119888119909 (A1)
Lift vector was obtained by transforming the normal force inthe NRRF and the short form of R
119910is
R119910=[
[
[
cos 1205752cos 1205751minus 1
cos 1205752sin 1205751
sin 1205752
]
]
]
sdot 119876V21198881015840119910 (A2)
Direction of the Magnus force vector points at the directionof k times 120585 and the expression of R
119911is
R119911=[
[
[
0
sin 1205752
minus cos 1205752sin 1205751
]
]
]
sdot 119876V21198881015840119911 (A3)
Expression of the gravity vector in the VRF can be written as
G =[
[
[
sin 120579119886cos1205952
cos 120579119886
sin 120579119886sin1205952
]
]
]
sdot 119898119892 (A4)
Static moment vector points at the direction of k times 120585 and theexpression ofM
119911can be obtained as
M119911=[
[
[
0
minus sin 1205751sin120573 + sin 120575
2cos 1205751cos120573
sin 1205751
]
]
]
119876119897V21198981015840 (A5)
Transverse damping moment vector points at the oppositedirection of the NRRF spin-rate vector 120596
1 which can be
written as
M119911119911=
[
[
[
[
0
minus120596120578
minus120596120577
]
]
]
]
119876119897119889V1198981015840119911119911 (A6)
The axial damping moment vector in the NRRF is written as
M119909119911=[
[
[
1
0
0
]
]
]
sdot 119876119897119889V1205961205851198981015840
119909119911 (A7)
Magnus moment vector is induced by the Magnus forcepointing at the plane of AOA and M
119910points at direction of
120585 times (120585 times k) and is expressed as
M119910=[
[
[
0
sin 1205751cos120573 + sin 120575
2cos 1205751sin120573
sin 1205752cos 1205751
]
]
]
119876119897119889120596120585V11989810158401015840119910
(A8)
Canard forces 119865119901119889 119865119888119889
depending on steering canards anddifferential canard are expressed as
119865119901119889= 119876V2119888
119901119889
119865119888119889= 119876V2119888
119888119889
(A9)
Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
(d) ignore the drag force 119865119909119888
and roll damping moment119872120585119888induced by fixed-cant canard frame
(e) ignore the 119865119888119889and119872
119888119889yielded by differential canards
1 and 3 assume the magnitude approximation 119865119888asymp
119865119901119889119872119888asymp 119865119901119889times 1198830
Then (2) and (5) are expanded and simplified by theabove rules Differential equations of trajectory path anddeflection angle and second-order differential equations ofpitch and yaw angle are obtained as follows
120579119886=
(119876V211988810158401199101205751+ 119876V21198881015840
1199111205752minus 119898119892 cos 120579
119886+ cos 120574
119888119865119888)
119898V
(9)
2=
(119876V211988810158401199101205752minus 119876V21198881015840
1199111205751+ 119898119892 sin 120579
119886sin1205952+ sin 120574
119888119865119888)
119898V
(10)
119886= (minus119876119897V21198981015840
1199111205751minus 119876119897119889V120596
1205771198981015840
119911119911minus 119876119897119889120596
120585V119898101584010158401199101205752
+119862120596120585120596120578+ 120596120578120596120577tan1206012+ 1198830cos 120574119888119865119888) (119860)minus1
(11)
2= (119876119897V21198981015840
1199111205752+ 119876119897119889V120596
1205781198981015840
119911119911minus 119876119897119889120596
120585V119898101584010158401199101205751
+119862120596120585120596120577minus 120596120578
2 tan1206012+ 1198830sin 120574119888119865119888) (119860)minus1
(12)
The complex trajectory angle differential equation is obtainedby adding (9) with (10) multiplied by imaginary unit 119894 as
Ψ = (119887119910V minus 119894119887119911120574)Δ +
119865119888
119898V119890119894120574119888
(13)
where 119887119910= 119876V1198881015840
119910119898 119887119911= 119876V1198881015840
119911119898 119890119894120574119888 = cos 120574
119888+ 119894 sin 120574
119888
Ψ = 120579119886+ 1198941205952 Δ = 120575
1+ 1198941205752 Differentiating (13) with respect
to time yields
Ψ = (119887119910V minus 119894119887119911120574)Δ + (119887
119910V minus 119894119887119911120574) Δ minus
V119865119888
119898V2119890119894120574119888
(14)
Meanwhile complex Euler angle differential equation isobtained by adding (11) with (12) multiplied by ndash119894 as
Φ + (119896119911119911V minus 119894
119862
119860
120574) Φ = (119896119911V2 + 119896
119910V)Δ +
1198830
119860
119865119888119890119894120574119888
(15)
where 119896119911= 119876119897119898
1015840
119911119860 119896119911119911= 11987611989721198981015840
119911119911119860 119896119910= 119876119897119889119896
10158401015840
119910119860 Φ =
120593119886+ 1198941205932
Consider the relationships between trajectory angleEuler angle and angle of attack Φ = Ψ + Δ Φ = Ψ + ΔComplex angle of attack (AOA) motion can be obtained byimporting (13) and (14) into (15) The expression of complexAOA differential equation is shown as in formula (17)
In order to linearize the complex AOA differential equa-tion time infinitesimal d(119905) is substituted by dimensionlesstrajectory arc infinitesimal d(119904) using the following deriva-tion form
V = V sdot V1015840 Δ = V sdot Δ1015840
Δ = V2 sdot Δ10158401015840 minus V2 sdot Δ1015840 (119887119909+
119892 sin 120579V2
)
(16)
The factors V2 and V in (17) are eliminated by importingthe above relationships and (17) can be linearized as (18)
Δ + (119896119911119911+ 119887119910minus 119894
119862 120574
119860V) VΔ minus [119896
119911+ 119894
119862 120574
119860V(119887119910minus
119860
119862
119896119910)] V2Δ
= minus120579 minus
120579V(119896119911119911minus 119894
119862 120574
119860V)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)119865119888119890119894120574119888
(17)
Δ10158401015840+ (119867 minus 119894119875)Δ
1015840minus (119872 + 119894119875119879)Δ
= minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
(18)
where 119867 = 119896119911119911+ 119887119910minus 119887119909minus 119892 sin 120579V2119875 = 119862 120574119860V 119872 = 119896
119911
and 119879 = 119887119910minus 119896119910119860119862
4 Analytical Solutions
41 Complex AOAI Solution To deduce the solution of linearnonhomogeneous differential equation (18) first we assumethe general solution form of homogeneous equation as
Δ = 11986211198901198971119904+ 11986221198901198972119904 (19)
where1198621and119862
2are indeterminate constants and 119897
1and 1198972are
eigenvalues of homogeneous equation hence the followingequations are set up
1198972
12+ (119867 minus 119894119875) 11989712
minus (119872 + 119894119875119879) = 0 (20a)
1198971+ 1198972= minus (119867 minus 119894119875) (20b)
1198971sdot 1198972= minus (119872 + 119894119875119879) (20c)
Differentiating (19) with respect to trajectory arc yields
Δ1015840= 1198621015840
1(119904) 1198901198971119904+ 1198621015840
2(119904) 1198901198972119904+ 11986211198972
11198901198971119904+ 11986221198972
21198901198972119904 (21)
Assuming 119862101584011198901198971119904+ 1198621015840
21198901198972119904= 0 and differentiating (21) with
respect to trajectory arc yield
Δ10158401015840= 1198621015840
1(119904) 1198971
1198901198971119904+ 1198621015840
2(119904) 1198972
1198901198972119904+ 11986211198972
11198901198971119904+ 11986221198972
21198901198972119904 (22)
Importing (19) (20a) (20b) (20c) (21) and (22) into (18)yields
1198621015840
111989711198901198971119904+ 1198621015840
211989721198901198972119904
= minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
(23)
Mathematical Problems in Engineering 5
Solution of simultaneous expressions equation (23) and1198621015840
11198901198971119904+ 1198621015840
21198901198972119904= 0 is written as
1198621015840
12(119904)
= plusmn
1
1198971minus 1198972
[minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
] 119890minus11989712119904
(24)
Then constants 1198621 1198622are determined by integrating (24)
Considering 120579
120579 variables the integrating result is expressed
as
11986212 (
119904)
= plusmn
1
1198971minus 1198972
[
120579
V211989712
+
120579
V211989712
2(119896119911119911minus 119894119875) +
120579
V11989712
times (119896119911119911minus 119894119875)] 119890
minus11989712119904
∓ (
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
times
119865119888
119898V211989712
119890minus11989712119904+119894120574119888
(25)
Finally importing (20b) (20c) and (25) into (19) yieldsthe particular solution of the complex angular motion as
Δ =1
119872 + 119894119875119879
[
120579
V2+
120579
V(119896119911119911minus 119894119875)] +
119896119911119911minus 119894119875
V2times
119867 minus 119894119875
119872 + 119894119875119879
120579
minus
1
119872 + 119894119875119879
(
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
119865119888
119898V2119890119894120574119888
(26)
The trim angle inducing by the canard control force isindicated by the items containing parameter 119865
119888 By observing
right-hand items of particular solution the analytical expres-sion of complex AOAI induced by canard control force canbe extracted as
Δ119888= 1205751119888+ 1198941205752119888
= minus
1
119872 + 119894119875119879
(
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
119865119888
119898V2119890119894120574119888
(27)
Transforming the denominator into real numbers and omit-ting small magnitude values (27) is expressed in a short formas
1205751119888= [1198701cos 120574119888minus 1198702sin 120574119888]
119865119888
119898V2 (28a)
1205752119888= [1198702cos 120574119888+ 1198701sin 120574119888]
119865119888
119898V2 (28b)
where
1198701= minus
1198981198830
119872119860
minus
V119872V2
minus
1198752119879
1198722 (29a)
1198702=
1198981198830119875119879
1198722119860
+
V1198751198791198722V2
+
119875
119872
(29b)
42 Complex TARI Solution The frozen coefficientmethod isadopted to deduce analytical solutions of trajectory parame-ter increment in swervingmotionThe angular rate of velocityvector in VRF is expressed as trajectory path angular ratein plane 119900-119909
2-1199102and deflection angular rate in plane 119900-119909
2-
1199112 The trajectory angular rate increment (TARI) indicates
the orientation of velocity vector rotation The differentialequations of trajectory angular rate with canard controlforce refer to (9) and (10) trajectory angular rate increment(TARI) for canard control force is obtained by subtracting thedifferential equation of trajectory angular rate without canardcontrol force For brevity result is written as
[
120579119886119888
2119888
] = [
1205751119888
1205752119888
] 119887119910V + [
1205752119888
minus1205751119888
] 119887119911V + [
cos 120574119888
sin 120574119888
] sdot
119865119888
119898V (30)
According to the main principle of frozen coefficientmethod slowly varying trajectory parameters are consideredas constants in a short time such as the total velocity dynamicpressure and aerodynamic coefficients Submitting complexAOAI analytical solutions 120575
1119888 1205752119888to (30) yields
[
120579119886119888
2119888
] = [
1198721cos 120574119888+1198722sin 120574119888
minus1198722cos 120574119888+1198721sin 120574119888
] sdot
119865119888
119898V (31a)
1198721= 1198871199101198701+ 1198871199111198702+ 1 (31b)
1198722= 1198871199111198701minus 1198871199101198702 (31c)
43 Increment Orientations Differential equation of masscenter swerving motion with canard control force referringto (4) is written as
119910 = cos (1205952+ Δ119905 sdot
2119888) sin (120579
119886+ Δ119905 sdot
120579119886119888) sdot V (32a)
= sin (1205952+ Δ119905 sdot
2119888) sdot V (32b)
Assuming that the short time is Δ119905 sin( 120579119886sdot Δ119905) asymp
120579119886sdot Δ119905
sin(2sdot Δ119905) asymp
2sdot Δ119905 cos( 120579
119886sdot Δ119905) asymp 1 and cos(
2sdot Δ119905) asymp 1
Subtracting (32a) and (32b) with differential equation ofmass center swerving motion without canard control forceprojectile swerving increment induced by the canard controlforce in short time Δ119905 is obtained as
119910119888= (cos120595
2cos 120579119886sdot120579119886119888minus sin120595
2sin 120579119886sdot 2119888
minus cos 120579119886sin1205952sdot120579119886119888sdot 2119888sdot Δ119905) sdot V sdot Δ1199052
(33a)
119911119888= cos120595
2sdot 2119888sdot V sdot Δ1199052 (33b)
6 Mathematical Problems in Engineering
Vminus
V+
ΔV
120578
120595minus2
120595+2
120579minusa
120601TARI
120579+a
120577
120601SWER
yc
zcz
y
(yminus zminus)
(y+ z+)
Figure 6 Rear view of the projectile definition of 120601TARI 120601SWER ldquominusrdquo means uncontrolled state ldquo+rdquo means controlled state The positive 120585 and119909 point into the page
Table 1 Parameters involved in analytical expressions
Constantcoefficient
Variablecoefficient
Trajectoryparameters Control input
119898 1198830
V
119865119888
119860 119896119911
120579119886
119862 119887119909
1205952
119892 119887119910
120574
Δ119905 119896119910 V
Simple algebraic manipulation yields the analyticalexpressions of orientations of TARI and swerving incrementshown in Figure 6
120601TARI = tanminus1 (2119888
120579119886119888
) 2119888le 0
120601TARI = tanminus1 (2119888
120579119886119888
) + 180 2119888gt 0
(34a)
120601SWER = tanminus1 (119911119888
119910119888
) 119911119888le 0
120601SWER = tanminus1 (119911119888
119910119888
) + 180 119911119888gt 0
(34b)
All parameters involved in analytical expressions arelisted in Table 1 Real-time performance of analytical solu-tions is ensured by the variable coefficients which areupdated with the trajectory parameters and aerodynamiccoefficients during the flight Combining with the trajectoryparameters and constant coefficients the orientations ofTARI and swerving increment with canard control input canbe predicted Note that the flying stability of the projectileshould exist
5 Simulation Results
In this chapter numerical simulations of projectile 6-DOFrigid motions with and without canard control were imple-mented Numerical solutions of trajectory parameter incre-ments are obtained by subtraction operation Meanwhile
Table 2 Projectile physical properties
119898 (kg) 119883119888(m) 119862 119860 119871 (m) 119863 (m)
45 0343 016 18 09 0155
Table 3 Initial launch conditions
Launch conditions Meteorological conditionsVelocity 930ms Ground pressure 1000 hPaElevation 50 deg Virtual temperature 2889Direction 0 deg Longitudinal wind 0msSpin rate 1800 rads Lateral wind 0ms
analytical solutions of TARI and swerving increment arecalculated by equations in the above section and orientationdeviations are analyzed by comparing with the numericalsolutions
51 Simulation Configurations Projectile physical propertiesreferring to the actual parameters are listed in Table 2 andthe initial launch conditions are listed in Table 3 The fourth-order Runge-Kutta method is employed in the numericalsimulations and the step-size is 000001 s
Projectile aerodynamic coefficients are obtained by aseries of computational fluid dynamics simulations previ-ously All coefficients are expressed as function of Machnumber shown in Figure 7 The numerical unguided 6-DOFrigid trajectory result is in good agreement with the firingtable data of the conventional 155mm spin-stabilized projec-tile
52 Numerical Trajectory Results Trajectory simulations of155mm spin-stabilized projectile with and without canardcontrol force are implemented under the same initial condi-tions Control period is set as the duration from apogee point(50 sec) to impact point and the canard rolling-angle 120574
119888is set
as 0 degFigure 8 shows the results of trajectory numerical simu-
lations Impact point drift of controlled trajectory indicates(Δ119909 Δ119911) = (1320m 753m) and the impact point drift
Mathematical Problems in Engineering 7
00 05 10 15 20 25 30 350
1
2
3
4
5
6
7
Mach number
Stat
ic ae
rody
nam
ic co
effici
ent
cy998400
mz998400
cx998400
(a) Static aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
0
10
20
Mach number
cz998400
mzz998400
mxz998400
my998400
Stat
ic ae
rody
nam
ic co
effici
ent
(b) Dynamic aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
000
001
Mach number
Cana
rd effi
cien
cy co
effici
ent
minus006
minus005
minus004
minus003
minus002
minus001
cpdmpd
ccdmcd
(c) Canard efficiency coefficients versus Mach number
00 05 10 15 20 25 30 35295
300
305
310
315
320
325
330
335
340
Mach number
Cen
ter o
f can
ard
pres
sure
coeffi
cien
t
X0
(d) Canard pressure center coefficient versus Mach number
Figure 7 Aerodynamic coefficients adopted in 6-DOF mathematical model
orientation indicates 297 deg Inconsistency can be seen fromthe impact point drift orientation and canard rolling angle
One of the influence factors is the nonconcentratedcontrol force orientation caused by the gyroscopic effectwhich can be reflected by the angularmotion of the projectileHowever the angular motion around the center of mass isindicated by the AOAI and the angular motion of velocityvector is indicated by the TARI To observe these angularmotions 3D curves of complex AOAI and TARI with timehistory are shown in Figures 9 and 10
Damped oscillation waves can be seen in numericalsolutions of complex AOAI and TARI with similar frequencyAccording to the control system stability criterion the angu-lar motions converge to steady state at about 20 sec aftercanard control started Therefore the adoptive prediction
orientations should be steady state value or trim value of theoscillation process
53 Analytical Angular Motion Results Combining with theknown meteorological parameters aerodynamic coefficientand rolling-angle 120574
119888 analytical solution of the AOAI is cal-
culated via (28a) and (28b) by using the controlled trajectoryparameters Moreover analytical solution of TARI is calcu-lated by (31a) (31b) and (31c) For the convenience of orienta-tion observation projection of analytical and numerical com-plex AOAI and TARI in plane of 119900-120578-120577 and 119900-119910
2-1199112is shown
in Figures 11 and 12 Due to the approximate process forthe deduction of analytical expression magnitude deviationcan be seen from the comparison However our attention isconcentrated in the orientation prediction By comparing
8 Mathematical Problems in Engineering
01
23
05001000150020000
5000
10000
15000
Hei
ght (
m)
Apogee point
Controlled IPP (298658 16404)
Uncontrolled IPP(296811 15548)
Launch point times104
Cross-range (m) Range (m)
Controlled trajectoryUncontrolled trajectory
Figure 8 Projectile 3D trajectory comparison
50 60 70 80 90 100 1100
Time (s)
Angle of slip side (deg)
Ang
le o
f in
cide
nce (
deg)
minus1
minus05
05minus05
0
05
1 70 s
Figure 9 3D curve of complex AOAI with time history
50 60 70 80 90 100 1100
002004
0
002
004
006
Time (s)
Deflection angular
rate (degs)
Tilt
angu
lar r
ate (
deg
s)
minus004minus002
minus002
70 s
Figure 10 3D curve of complex TARI with time history
the orientations of analytical solutions with numerical steadystate value well agreement can be seen in this case andanalytical orientations indicate the trim value of numericalorientations To discuss general applicability of analyticalorientation expressions for TARI and swerving incrementmore simulations are implemented in the following section
00 02 04 06
00
04
08
12
Numerical solutionAnalytical solution
minus06 minus04 minus02
1205752c (rad)
1205751c
(rad
)Figure 11 Projection of complex AOAI in plane of 119900-120578-120577
000 002 004 006
000
002
004
006
Analytical solutionNumerical solution
minus002minus002
120579a
(rad
s)
1205952 (rads)
Figure 12 Projection of complex TARI in plane of 119900-1199102-1199112
54 Orientation Prediction Under different conditions ana-lytical and numerical orientations of TARI and swervingincrement were calculated The start time of control periodis set at the apogee point 15 s later and 30 s later The initialelevations are set as 50 deg 40 deg and 30 deg The numer-ical and analytical orientations of TARI and swerving incre-ment are drawn in Figures 13 14 and 15
As seen from the left side figures analytical TARI orienta-tions are not affected by initial elevation and control start timeand appear as trim value of numerical orientations Considerthat the deviations between numerical and analytical orienta-tions achieve steady state when the amplitude of oscillation is
Mathematical Problems in Engineering 9
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
7 s10 sStart time 80 sStart time 65 s
Start time 50 s
16 s
120601TA
RI(r
ad)
(a) TARI orientation
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
Start time 80 sStart time 65 sStart time 50 s
3s7 s12 s
120601SW
ER(r
ad)
(b) Swerving increment orientation
Figure 13 Numerical and analytical results under initial elevation 50 deg
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601TA
RI(r
ad)
45 sStart time 67 s
7 s
Start time 37 sStart time 52 s
12 s
Numerical solutionAnalytical solution
(a) TARI orientation
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 67 sStart time 37 s Start time 52 s
2 s4 s5 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 14 Numerical and analytical results under initial elevation 40 deg
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601TA
RI(r
ad)
6 s Start time 59 s
Start time 44 s
6 s
Start time 29 s
7 s
Numerical solutionAnalytical solution
(a) TARI orientation
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 59 sStart time 44 sStart time 29 s
2 s3 s3 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 15 Numerical and analytical results under initial elevation 30 deg
less than 10 deg Convergence time for the deviation reachingsteady state is recorded For each initial elevation closercontrol start time to the end of flight costs less convergencetime and for different initial elevations lower initial elevationangle costs less convergence time
As seen from the right side figures no oscillation processis indicated from the deviation between numerical and ana-lytical swerving increment orientations The deviations arefirstly decreased during the beginning of control period and
then negative deviations increased and time durations for thedeviations decreasing to less than 10 deg are recorded Simi-lar law can be seen from the recorded orientation deviationdecreasing time of TARI and swerving increment and theswerving increment orientation deviations are converged in ashorter time than the TARI orientation deviations under thesame initial elevation It is worth noting that at the start timeof 59 sec in Figure 15 the numerical TARI orientation reachesthe critical divergence state and the analytical orientation still
10 Mathematical Problems in Engineering
represents trim value of the oscillation processMoreover theanalytical and numerical solution of swerving orientationsshows little affection by the critical divergence state of TARI
6 Conclusions
This paper focuses on the swerving orientation prediction forthe square crossing fixed-cant canard configuration Analyt-ical expressions of TARI and swerving increment orientationare deduced without the attitude information Based on thesimulations under different initial elevation and control timeconditions the following conclusions can be obtained
(1) Analytical orientations of TARI and swerving incre-ment indicate the trim value of the numerical orien-tations Deviations between numerical and analyticalorientations converge in period of time after controlstarted
(2) For each initial elevation closer control start timesto the end of flight cost less convergence time Fordifferent initial elevations lower initial elevation costsless convergence time
(3) Based on the target trajectory angular rate orientationor target swerving orientation provided by navigationsystem the desired rolling angle of canard frame canbe determined by the reverse solution of incrementorientation analytical expressions By setting appro-priate control start time and duration cost-effectiveguidance strategy involving no empirical formula forfixed-cant canard configurationwill be accomplished
Appendix
Force and Moment Expressions
The direction of drag vector points at the negative 1199092 in the
VRF the expression of R119909can be written as
R119909=[
[
[
minus1
0
0
]
]
]
sdot 119876V2119888119909 (A1)
Lift vector was obtained by transforming the normal force inthe NRRF and the short form of R
119910is
R119910=[
[
[
cos 1205752cos 1205751minus 1
cos 1205752sin 1205751
sin 1205752
]
]
]
sdot 119876V21198881015840119910 (A2)
Direction of the Magnus force vector points at the directionof k times 120585 and the expression of R
119911is
R119911=[
[
[
0
sin 1205752
minus cos 1205752sin 1205751
]
]
]
sdot 119876V21198881015840119911 (A3)
Expression of the gravity vector in the VRF can be written as
G =[
[
[
sin 120579119886cos1205952
cos 120579119886
sin 120579119886sin1205952
]
]
]
sdot 119898119892 (A4)
Static moment vector points at the direction of k times 120585 and theexpression ofM
119911can be obtained as
M119911=[
[
[
0
minus sin 1205751sin120573 + sin 120575
2cos 1205751cos120573
sin 1205751
]
]
]
119876119897V21198981015840 (A5)
Transverse damping moment vector points at the oppositedirection of the NRRF spin-rate vector 120596
1 which can be
written as
M119911119911=
[
[
[
[
0
minus120596120578
minus120596120577
]
]
]
]
119876119897119889V1198981015840119911119911 (A6)
The axial damping moment vector in the NRRF is written as
M119909119911=[
[
[
1
0
0
]
]
]
sdot 119876119897119889V1205961205851198981015840
119909119911 (A7)
Magnus moment vector is induced by the Magnus forcepointing at the plane of AOA and M
119910points at direction of
120585 times (120585 times k) and is expressed as
M119910=[
[
[
0
sin 1205751cos120573 + sin 120575
2cos 1205751sin120573
sin 1205752cos 1205751
]
]
]
119876119897119889120596120585V11989810158401015840119910
(A8)
Canard forces 119865119901119889 119865119888119889
depending on steering canards anddifferential canard are expressed as
119865119901119889= 119876V2119888
119901119889
119865119888119889= 119876V2119888
119888119889
(A9)
Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Solution of simultaneous expressions equation (23) and1198621015840
11198901198971119904+ 1198621015840
21198901198972119904= 0 is written as
1198621015840
12(119904)
= plusmn
1
1198971minus 1198972
[minus
120579
V2minus
120579
V(119896119911119911minus 119894119875)
+ (
1198830
119860
+
V119898V2
minus
119896119911119911
119898
+ 119894
119862 120574
119860119898V)
119865119888
V2119890119894120574119888
] 119890minus11989712119904
(24)
Then constants 1198621 1198622are determined by integrating (24)
Considering 120579
120579 variables the integrating result is expressed
as
11986212 (
119904)
= plusmn
1
1198971minus 1198972
[
120579
V211989712
+
120579
V211989712
2(119896119911119911minus 119894119875) +
120579
V11989712
times (119896119911119911minus 119894119875)] 119890
minus11989712119904
∓ (
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
times
119865119888
119898V211989712
119890minus11989712119904+119894120574119888
(25)
Finally importing (20b) (20c) and (25) into (19) yieldsthe particular solution of the complex angular motion as
Δ =1
119872 + 119894119875119879
[
120579
V2+
120579
V(119896119911119911minus 119894119875)] +
119896119911119911minus 119894119875
V2times
119867 minus 119894119875
119872 + 119894119875119879
120579
minus
1
119872 + 119894119875119879
(
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
119865119888
119898V2119890119894120574119888
(26)
The trim angle inducing by the canard control force isindicated by the items containing parameter 119865
119888 By observing
right-hand items of particular solution the analytical expres-sion of complex AOAI induced by canard control force canbe extracted as
Δ119888= 1205751119888+ 1198941205752119888
= minus
1
119872 + 119894119875119879
(
1198981198830
119860
+
VV2
minus 119896119911119911+ 119894
119862 120574
119860V)
119865119888
119898V2119890119894120574119888
(27)
Transforming the denominator into real numbers and omit-ting small magnitude values (27) is expressed in a short formas
1205751119888= [1198701cos 120574119888minus 1198702sin 120574119888]
119865119888
119898V2 (28a)
1205752119888= [1198702cos 120574119888+ 1198701sin 120574119888]
119865119888
119898V2 (28b)
where
1198701= minus
1198981198830
119872119860
minus
V119872V2
minus
1198752119879
1198722 (29a)
1198702=
1198981198830119875119879
1198722119860
+
V1198751198791198722V2
+
119875
119872
(29b)
42 Complex TARI Solution The frozen coefficientmethod isadopted to deduce analytical solutions of trajectory parame-ter increment in swervingmotionThe angular rate of velocityvector in VRF is expressed as trajectory path angular ratein plane 119900-119909
2-1199102and deflection angular rate in plane 119900-119909
2-
1199112 The trajectory angular rate increment (TARI) indicates
the orientation of velocity vector rotation The differentialequations of trajectory angular rate with canard controlforce refer to (9) and (10) trajectory angular rate increment(TARI) for canard control force is obtained by subtracting thedifferential equation of trajectory angular rate without canardcontrol force For brevity result is written as
[
120579119886119888
2119888
] = [
1205751119888
1205752119888
] 119887119910V + [
1205752119888
minus1205751119888
] 119887119911V + [
cos 120574119888
sin 120574119888
] sdot
119865119888
119898V (30)
According to the main principle of frozen coefficientmethod slowly varying trajectory parameters are consideredas constants in a short time such as the total velocity dynamicpressure and aerodynamic coefficients Submitting complexAOAI analytical solutions 120575
1119888 1205752119888to (30) yields
[
120579119886119888
2119888
] = [
1198721cos 120574119888+1198722sin 120574119888
minus1198722cos 120574119888+1198721sin 120574119888
] sdot
119865119888
119898V (31a)
1198721= 1198871199101198701+ 1198871199111198702+ 1 (31b)
1198722= 1198871199111198701minus 1198871199101198702 (31c)
43 Increment Orientations Differential equation of masscenter swerving motion with canard control force referringto (4) is written as
119910 = cos (1205952+ Δ119905 sdot
2119888) sin (120579
119886+ Δ119905 sdot
120579119886119888) sdot V (32a)
= sin (1205952+ Δ119905 sdot
2119888) sdot V (32b)
Assuming that the short time is Δ119905 sin( 120579119886sdot Δ119905) asymp
120579119886sdot Δ119905
sin(2sdot Δ119905) asymp
2sdot Δ119905 cos( 120579
119886sdot Δ119905) asymp 1 and cos(
2sdot Δ119905) asymp 1
Subtracting (32a) and (32b) with differential equation ofmass center swerving motion without canard control forceprojectile swerving increment induced by the canard controlforce in short time Δ119905 is obtained as
119910119888= (cos120595
2cos 120579119886sdot120579119886119888minus sin120595
2sin 120579119886sdot 2119888
minus cos 120579119886sin1205952sdot120579119886119888sdot 2119888sdot Δ119905) sdot V sdot Δ1199052
(33a)
119911119888= cos120595
2sdot 2119888sdot V sdot Δ1199052 (33b)
6 Mathematical Problems in Engineering
Vminus
V+
ΔV
120578
120595minus2
120595+2
120579minusa
120601TARI
120579+a
120577
120601SWER
yc
zcz
y
(yminus zminus)
(y+ z+)
Figure 6 Rear view of the projectile definition of 120601TARI 120601SWER ldquominusrdquo means uncontrolled state ldquo+rdquo means controlled state The positive 120585 and119909 point into the page
Table 1 Parameters involved in analytical expressions
Constantcoefficient
Variablecoefficient
Trajectoryparameters Control input
119898 1198830
V
119865119888
119860 119896119911
120579119886
119862 119887119909
1205952
119892 119887119910
120574
Δ119905 119896119910 V
Simple algebraic manipulation yields the analyticalexpressions of orientations of TARI and swerving incrementshown in Figure 6
120601TARI = tanminus1 (2119888
120579119886119888
) 2119888le 0
120601TARI = tanminus1 (2119888
120579119886119888
) + 180 2119888gt 0
(34a)
120601SWER = tanminus1 (119911119888
119910119888
) 119911119888le 0
120601SWER = tanminus1 (119911119888
119910119888
) + 180 119911119888gt 0
(34b)
All parameters involved in analytical expressions arelisted in Table 1 Real-time performance of analytical solu-tions is ensured by the variable coefficients which areupdated with the trajectory parameters and aerodynamiccoefficients during the flight Combining with the trajectoryparameters and constant coefficients the orientations ofTARI and swerving increment with canard control input canbe predicted Note that the flying stability of the projectileshould exist
5 Simulation Results
In this chapter numerical simulations of projectile 6-DOFrigid motions with and without canard control were imple-mented Numerical solutions of trajectory parameter incre-ments are obtained by subtraction operation Meanwhile
Table 2 Projectile physical properties
119898 (kg) 119883119888(m) 119862 119860 119871 (m) 119863 (m)
45 0343 016 18 09 0155
Table 3 Initial launch conditions
Launch conditions Meteorological conditionsVelocity 930ms Ground pressure 1000 hPaElevation 50 deg Virtual temperature 2889Direction 0 deg Longitudinal wind 0msSpin rate 1800 rads Lateral wind 0ms
analytical solutions of TARI and swerving increment arecalculated by equations in the above section and orientationdeviations are analyzed by comparing with the numericalsolutions
51 Simulation Configurations Projectile physical propertiesreferring to the actual parameters are listed in Table 2 andthe initial launch conditions are listed in Table 3 The fourth-order Runge-Kutta method is employed in the numericalsimulations and the step-size is 000001 s
Projectile aerodynamic coefficients are obtained by aseries of computational fluid dynamics simulations previ-ously All coefficients are expressed as function of Machnumber shown in Figure 7 The numerical unguided 6-DOFrigid trajectory result is in good agreement with the firingtable data of the conventional 155mm spin-stabilized projec-tile
52 Numerical Trajectory Results Trajectory simulations of155mm spin-stabilized projectile with and without canardcontrol force are implemented under the same initial condi-tions Control period is set as the duration from apogee point(50 sec) to impact point and the canard rolling-angle 120574
119888is set
as 0 degFigure 8 shows the results of trajectory numerical simu-
lations Impact point drift of controlled trajectory indicates(Δ119909 Δ119911) = (1320m 753m) and the impact point drift
Mathematical Problems in Engineering 7
00 05 10 15 20 25 30 350
1
2
3
4
5
6
7
Mach number
Stat
ic ae
rody
nam
ic co
effici
ent
cy998400
mz998400
cx998400
(a) Static aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
0
10
20
Mach number
cz998400
mzz998400
mxz998400
my998400
Stat
ic ae
rody
nam
ic co
effici
ent
(b) Dynamic aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
000
001
Mach number
Cana
rd effi
cien
cy co
effici
ent
minus006
minus005
minus004
minus003
minus002
minus001
cpdmpd
ccdmcd
(c) Canard efficiency coefficients versus Mach number
00 05 10 15 20 25 30 35295
300
305
310
315
320
325
330
335
340
Mach number
Cen
ter o
f can
ard
pres
sure
coeffi
cien
t
X0
(d) Canard pressure center coefficient versus Mach number
Figure 7 Aerodynamic coefficients adopted in 6-DOF mathematical model
orientation indicates 297 deg Inconsistency can be seen fromthe impact point drift orientation and canard rolling angle
One of the influence factors is the nonconcentratedcontrol force orientation caused by the gyroscopic effectwhich can be reflected by the angularmotion of the projectileHowever the angular motion around the center of mass isindicated by the AOAI and the angular motion of velocityvector is indicated by the TARI To observe these angularmotions 3D curves of complex AOAI and TARI with timehistory are shown in Figures 9 and 10
Damped oscillation waves can be seen in numericalsolutions of complex AOAI and TARI with similar frequencyAccording to the control system stability criterion the angu-lar motions converge to steady state at about 20 sec aftercanard control started Therefore the adoptive prediction
orientations should be steady state value or trim value of theoscillation process
53 Analytical Angular Motion Results Combining with theknown meteorological parameters aerodynamic coefficientand rolling-angle 120574
119888 analytical solution of the AOAI is cal-
culated via (28a) and (28b) by using the controlled trajectoryparameters Moreover analytical solution of TARI is calcu-lated by (31a) (31b) and (31c) For the convenience of orienta-tion observation projection of analytical and numerical com-plex AOAI and TARI in plane of 119900-120578-120577 and 119900-119910
2-1199112is shown
in Figures 11 and 12 Due to the approximate process forthe deduction of analytical expression magnitude deviationcan be seen from the comparison However our attention isconcentrated in the orientation prediction By comparing
8 Mathematical Problems in Engineering
01
23
05001000150020000
5000
10000
15000
Hei
ght (
m)
Apogee point
Controlled IPP (298658 16404)
Uncontrolled IPP(296811 15548)
Launch point times104
Cross-range (m) Range (m)
Controlled trajectoryUncontrolled trajectory
Figure 8 Projectile 3D trajectory comparison
50 60 70 80 90 100 1100
Time (s)
Angle of slip side (deg)
Ang
le o
f in
cide
nce (
deg)
minus1
minus05
05minus05
0
05
1 70 s
Figure 9 3D curve of complex AOAI with time history
50 60 70 80 90 100 1100
002004
0
002
004
006
Time (s)
Deflection angular
rate (degs)
Tilt
angu
lar r
ate (
deg
s)
minus004minus002
minus002
70 s
Figure 10 3D curve of complex TARI with time history
the orientations of analytical solutions with numerical steadystate value well agreement can be seen in this case andanalytical orientations indicate the trim value of numericalorientations To discuss general applicability of analyticalorientation expressions for TARI and swerving incrementmore simulations are implemented in the following section
00 02 04 06
00
04
08
12
Numerical solutionAnalytical solution
minus06 minus04 minus02
1205752c (rad)
1205751c
(rad
)Figure 11 Projection of complex AOAI in plane of 119900-120578-120577
000 002 004 006
000
002
004
006
Analytical solutionNumerical solution
minus002minus002
120579a
(rad
s)
1205952 (rads)
Figure 12 Projection of complex TARI in plane of 119900-1199102-1199112
54 Orientation Prediction Under different conditions ana-lytical and numerical orientations of TARI and swervingincrement were calculated The start time of control periodis set at the apogee point 15 s later and 30 s later The initialelevations are set as 50 deg 40 deg and 30 deg The numer-ical and analytical orientations of TARI and swerving incre-ment are drawn in Figures 13 14 and 15
As seen from the left side figures analytical TARI orienta-tions are not affected by initial elevation and control start timeand appear as trim value of numerical orientations Considerthat the deviations between numerical and analytical orienta-tions achieve steady state when the amplitude of oscillation is
Mathematical Problems in Engineering 9
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
7 s10 sStart time 80 sStart time 65 s
Start time 50 s
16 s
120601TA
RI(r
ad)
(a) TARI orientation
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
Start time 80 sStart time 65 sStart time 50 s
3s7 s12 s
120601SW
ER(r
ad)
(b) Swerving increment orientation
Figure 13 Numerical and analytical results under initial elevation 50 deg
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601TA
RI(r
ad)
45 sStart time 67 s
7 s
Start time 37 sStart time 52 s
12 s
Numerical solutionAnalytical solution
(a) TARI orientation
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 67 sStart time 37 s Start time 52 s
2 s4 s5 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 14 Numerical and analytical results under initial elevation 40 deg
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601TA
RI(r
ad)
6 s Start time 59 s
Start time 44 s
6 s
Start time 29 s
7 s
Numerical solutionAnalytical solution
(a) TARI orientation
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 59 sStart time 44 sStart time 29 s
2 s3 s3 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 15 Numerical and analytical results under initial elevation 30 deg
less than 10 deg Convergence time for the deviation reachingsteady state is recorded For each initial elevation closercontrol start time to the end of flight costs less convergencetime and for different initial elevations lower initial elevationangle costs less convergence time
As seen from the right side figures no oscillation processis indicated from the deviation between numerical and ana-lytical swerving increment orientations The deviations arefirstly decreased during the beginning of control period and
then negative deviations increased and time durations for thedeviations decreasing to less than 10 deg are recorded Simi-lar law can be seen from the recorded orientation deviationdecreasing time of TARI and swerving increment and theswerving increment orientation deviations are converged in ashorter time than the TARI orientation deviations under thesame initial elevation It is worth noting that at the start timeof 59 sec in Figure 15 the numerical TARI orientation reachesthe critical divergence state and the analytical orientation still
10 Mathematical Problems in Engineering
represents trim value of the oscillation processMoreover theanalytical and numerical solution of swerving orientationsshows little affection by the critical divergence state of TARI
6 Conclusions
This paper focuses on the swerving orientation prediction forthe square crossing fixed-cant canard configuration Analyt-ical expressions of TARI and swerving increment orientationare deduced without the attitude information Based on thesimulations under different initial elevation and control timeconditions the following conclusions can be obtained
(1) Analytical orientations of TARI and swerving incre-ment indicate the trim value of the numerical orien-tations Deviations between numerical and analyticalorientations converge in period of time after controlstarted
(2) For each initial elevation closer control start timesto the end of flight cost less convergence time Fordifferent initial elevations lower initial elevation costsless convergence time
(3) Based on the target trajectory angular rate orientationor target swerving orientation provided by navigationsystem the desired rolling angle of canard frame canbe determined by the reverse solution of incrementorientation analytical expressions By setting appro-priate control start time and duration cost-effectiveguidance strategy involving no empirical formula forfixed-cant canard configurationwill be accomplished
Appendix
Force and Moment Expressions
The direction of drag vector points at the negative 1199092 in the
VRF the expression of R119909can be written as
R119909=[
[
[
minus1
0
0
]
]
]
sdot 119876V2119888119909 (A1)
Lift vector was obtained by transforming the normal force inthe NRRF and the short form of R
119910is
R119910=[
[
[
cos 1205752cos 1205751minus 1
cos 1205752sin 1205751
sin 1205752
]
]
]
sdot 119876V21198881015840119910 (A2)
Direction of the Magnus force vector points at the directionof k times 120585 and the expression of R
119911is
R119911=[
[
[
0
sin 1205752
minus cos 1205752sin 1205751
]
]
]
sdot 119876V21198881015840119911 (A3)
Expression of the gravity vector in the VRF can be written as
G =[
[
[
sin 120579119886cos1205952
cos 120579119886
sin 120579119886sin1205952
]
]
]
sdot 119898119892 (A4)
Static moment vector points at the direction of k times 120585 and theexpression ofM
119911can be obtained as
M119911=[
[
[
0
minus sin 1205751sin120573 + sin 120575
2cos 1205751cos120573
sin 1205751
]
]
]
119876119897V21198981015840 (A5)
Transverse damping moment vector points at the oppositedirection of the NRRF spin-rate vector 120596
1 which can be
written as
M119911119911=
[
[
[
[
0
minus120596120578
minus120596120577
]
]
]
]
119876119897119889V1198981015840119911119911 (A6)
The axial damping moment vector in the NRRF is written as
M119909119911=[
[
[
1
0
0
]
]
]
sdot 119876119897119889V1205961205851198981015840
119909119911 (A7)
Magnus moment vector is induced by the Magnus forcepointing at the plane of AOA and M
119910points at direction of
120585 times (120585 times k) and is expressed as
M119910=[
[
[
0
sin 1205751cos120573 + sin 120575
2cos 1205751sin120573
sin 1205752cos 1205751
]
]
]
119876119897119889120596120585V11989810158401015840119910
(A8)
Canard forces 119865119901119889 119865119888119889
depending on steering canards anddifferential canard are expressed as
119865119901119889= 119876V2119888
119901119889
119865119888119889= 119876V2119888
119888119889
(A9)
Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Vminus
V+
ΔV
120578
120595minus2
120595+2
120579minusa
120601TARI
120579+a
120577
120601SWER
yc
zcz
y
(yminus zminus)
(y+ z+)
Figure 6 Rear view of the projectile definition of 120601TARI 120601SWER ldquominusrdquo means uncontrolled state ldquo+rdquo means controlled state The positive 120585 and119909 point into the page
Table 1 Parameters involved in analytical expressions
Constantcoefficient
Variablecoefficient
Trajectoryparameters Control input
119898 1198830
V
119865119888
119860 119896119911
120579119886
119862 119887119909
1205952
119892 119887119910
120574
Δ119905 119896119910 V
Simple algebraic manipulation yields the analyticalexpressions of orientations of TARI and swerving incrementshown in Figure 6
120601TARI = tanminus1 (2119888
120579119886119888
) 2119888le 0
120601TARI = tanminus1 (2119888
120579119886119888
) + 180 2119888gt 0
(34a)
120601SWER = tanminus1 (119911119888
119910119888
) 119911119888le 0
120601SWER = tanminus1 (119911119888
119910119888
) + 180 119911119888gt 0
(34b)
All parameters involved in analytical expressions arelisted in Table 1 Real-time performance of analytical solu-tions is ensured by the variable coefficients which areupdated with the trajectory parameters and aerodynamiccoefficients during the flight Combining with the trajectoryparameters and constant coefficients the orientations ofTARI and swerving increment with canard control input canbe predicted Note that the flying stability of the projectileshould exist
5 Simulation Results
In this chapter numerical simulations of projectile 6-DOFrigid motions with and without canard control were imple-mented Numerical solutions of trajectory parameter incre-ments are obtained by subtraction operation Meanwhile
Table 2 Projectile physical properties
119898 (kg) 119883119888(m) 119862 119860 119871 (m) 119863 (m)
45 0343 016 18 09 0155
Table 3 Initial launch conditions
Launch conditions Meteorological conditionsVelocity 930ms Ground pressure 1000 hPaElevation 50 deg Virtual temperature 2889Direction 0 deg Longitudinal wind 0msSpin rate 1800 rads Lateral wind 0ms
analytical solutions of TARI and swerving increment arecalculated by equations in the above section and orientationdeviations are analyzed by comparing with the numericalsolutions
51 Simulation Configurations Projectile physical propertiesreferring to the actual parameters are listed in Table 2 andthe initial launch conditions are listed in Table 3 The fourth-order Runge-Kutta method is employed in the numericalsimulations and the step-size is 000001 s
Projectile aerodynamic coefficients are obtained by aseries of computational fluid dynamics simulations previ-ously All coefficients are expressed as function of Machnumber shown in Figure 7 The numerical unguided 6-DOFrigid trajectory result is in good agreement with the firingtable data of the conventional 155mm spin-stabilized projec-tile
52 Numerical Trajectory Results Trajectory simulations of155mm spin-stabilized projectile with and without canardcontrol force are implemented under the same initial condi-tions Control period is set as the duration from apogee point(50 sec) to impact point and the canard rolling-angle 120574
119888is set
as 0 degFigure 8 shows the results of trajectory numerical simu-
lations Impact point drift of controlled trajectory indicates(Δ119909 Δ119911) = (1320m 753m) and the impact point drift
Mathematical Problems in Engineering 7
00 05 10 15 20 25 30 350
1
2
3
4
5
6
7
Mach number
Stat
ic ae
rody
nam
ic co
effici
ent
cy998400
mz998400
cx998400
(a) Static aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
0
10
20
Mach number
cz998400
mzz998400
mxz998400
my998400
Stat
ic ae
rody
nam
ic co
effici
ent
(b) Dynamic aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
000
001
Mach number
Cana
rd effi
cien
cy co
effici
ent
minus006
minus005
minus004
minus003
minus002
minus001
cpdmpd
ccdmcd
(c) Canard efficiency coefficients versus Mach number
00 05 10 15 20 25 30 35295
300
305
310
315
320
325
330
335
340
Mach number
Cen
ter o
f can
ard
pres
sure
coeffi
cien
t
X0
(d) Canard pressure center coefficient versus Mach number
Figure 7 Aerodynamic coefficients adopted in 6-DOF mathematical model
orientation indicates 297 deg Inconsistency can be seen fromthe impact point drift orientation and canard rolling angle
One of the influence factors is the nonconcentratedcontrol force orientation caused by the gyroscopic effectwhich can be reflected by the angularmotion of the projectileHowever the angular motion around the center of mass isindicated by the AOAI and the angular motion of velocityvector is indicated by the TARI To observe these angularmotions 3D curves of complex AOAI and TARI with timehistory are shown in Figures 9 and 10
Damped oscillation waves can be seen in numericalsolutions of complex AOAI and TARI with similar frequencyAccording to the control system stability criterion the angu-lar motions converge to steady state at about 20 sec aftercanard control started Therefore the adoptive prediction
orientations should be steady state value or trim value of theoscillation process
53 Analytical Angular Motion Results Combining with theknown meteorological parameters aerodynamic coefficientand rolling-angle 120574
119888 analytical solution of the AOAI is cal-
culated via (28a) and (28b) by using the controlled trajectoryparameters Moreover analytical solution of TARI is calcu-lated by (31a) (31b) and (31c) For the convenience of orienta-tion observation projection of analytical and numerical com-plex AOAI and TARI in plane of 119900-120578-120577 and 119900-119910
2-1199112is shown
in Figures 11 and 12 Due to the approximate process forthe deduction of analytical expression magnitude deviationcan be seen from the comparison However our attention isconcentrated in the orientation prediction By comparing
8 Mathematical Problems in Engineering
01
23
05001000150020000
5000
10000
15000
Hei
ght (
m)
Apogee point
Controlled IPP (298658 16404)
Uncontrolled IPP(296811 15548)
Launch point times104
Cross-range (m) Range (m)
Controlled trajectoryUncontrolled trajectory
Figure 8 Projectile 3D trajectory comparison
50 60 70 80 90 100 1100
Time (s)
Angle of slip side (deg)
Ang
le o
f in
cide
nce (
deg)
minus1
minus05
05minus05
0
05
1 70 s
Figure 9 3D curve of complex AOAI with time history
50 60 70 80 90 100 1100
002004
0
002
004
006
Time (s)
Deflection angular
rate (degs)
Tilt
angu
lar r
ate (
deg
s)
minus004minus002
minus002
70 s
Figure 10 3D curve of complex TARI with time history
the orientations of analytical solutions with numerical steadystate value well agreement can be seen in this case andanalytical orientations indicate the trim value of numericalorientations To discuss general applicability of analyticalorientation expressions for TARI and swerving incrementmore simulations are implemented in the following section
00 02 04 06
00
04
08
12
Numerical solutionAnalytical solution
minus06 minus04 minus02
1205752c (rad)
1205751c
(rad
)Figure 11 Projection of complex AOAI in plane of 119900-120578-120577
000 002 004 006
000
002
004
006
Analytical solutionNumerical solution
minus002minus002
120579a
(rad
s)
1205952 (rads)
Figure 12 Projection of complex TARI in plane of 119900-1199102-1199112
54 Orientation Prediction Under different conditions ana-lytical and numerical orientations of TARI and swervingincrement were calculated The start time of control periodis set at the apogee point 15 s later and 30 s later The initialelevations are set as 50 deg 40 deg and 30 deg The numer-ical and analytical orientations of TARI and swerving incre-ment are drawn in Figures 13 14 and 15
As seen from the left side figures analytical TARI orienta-tions are not affected by initial elevation and control start timeand appear as trim value of numerical orientations Considerthat the deviations between numerical and analytical orienta-tions achieve steady state when the amplitude of oscillation is
Mathematical Problems in Engineering 9
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
7 s10 sStart time 80 sStart time 65 s
Start time 50 s
16 s
120601TA
RI(r
ad)
(a) TARI orientation
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
Start time 80 sStart time 65 sStart time 50 s
3s7 s12 s
120601SW
ER(r
ad)
(b) Swerving increment orientation
Figure 13 Numerical and analytical results under initial elevation 50 deg
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601TA
RI(r
ad)
45 sStart time 67 s
7 s
Start time 37 sStart time 52 s
12 s
Numerical solutionAnalytical solution
(a) TARI orientation
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 67 sStart time 37 s Start time 52 s
2 s4 s5 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 14 Numerical and analytical results under initial elevation 40 deg
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601TA
RI(r
ad)
6 s Start time 59 s
Start time 44 s
6 s
Start time 29 s
7 s
Numerical solutionAnalytical solution
(a) TARI orientation
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 59 sStart time 44 sStart time 29 s
2 s3 s3 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 15 Numerical and analytical results under initial elevation 30 deg
less than 10 deg Convergence time for the deviation reachingsteady state is recorded For each initial elevation closercontrol start time to the end of flight costs less convergencetime and for different initial elevations lower initial elevationangle costs less convergence time
As seen from the right side figures no oscillation processis indicated from the deviation between numerical and ana-lytical swerving increment orientations The deviations arefirstly decreased during the beginning of control period and
then negative deviations increased and time durations for thedeviations decreasing to less than 10 deg are recorded Simi-lar law can be seen from the recorded orientation deviationdecreasing time of TARI and swerving increment and theswerving increment orientation deviations are converged in ashorter time than the TARI orientation deviations under thesame initial elevation It is worth noting that at the start timeof 59 sec in Figure 15 the numerical TARI orientation reachesthe critical divergence state and the analytical orientation still
10 Mathematical Problems in Engineering
represents trim value of the oscillation processMoreover theanalytical and numerical solution of swerving orientationsshows little affection by the critical divergence state of TARI
6 Conclusions
This paper focuses on the swerving orientation prediction forthe square crossing fixed-cant canard configuration Analyt-ical expressions of TARI and swerving increment orientationare deduced without the attitude information Based on thesimulations under different initial elevation and control timeconditions the following conclusions can be obtained
(1) Analytical orientations of TARI and swerving incre-ment indicate the trim value of the numerical orien-tations Deviations between numerical and analyticalorientations converge in period of time after controlstarted
(2) For each initial elevation closer control start timesto the end of flight cost less convergence time Fordifferent initial elevations lower initial elevation costsless convergence time
(3) Based on the target trajectory angular rate orientationor target swerving orientation provided by navigationsystem the desired rolling angle of canard frame canbe determined by the reverse solution of incrementorientation analytical expressions By setting appro-priate control start time and duration cost-effectiveguidance strategy involving no empirical formula forfixed-cant canard configurationwill be accomplished
Appendix
Force and Moment Expressions
The direction of drag vector points at the negative 1199092 in the
VRF the expression of R119909can be written as
R119909=[
[
[
minus1
0
0
]
]
]
sdot 119876V2119888119909 (A1)
Lift vector was obtained by transforming the normal force inthe NRRF and the short form of R
119910is
R119910=[
[
[
cos 1205752cos 1205751minus 1
cos 1205752sin 1205751
sin 1205752
]
]
]
sdot 119876V21198881015840119910 (A2)
Direction of the Magnus force vector points at the directionof k times 120585 and the expression of R
119911is
R119911=[
[
[
0
sin 1205752
minus cos 1205752sin 1205751
]
]
]
sdot 119876V21198881015840119911 (A3)
Expression of the gravity vector in the VRF can be written as
G =[
[
[
sin 120579119886cos1205952
cos 120579119886
sin 120579119886sin1205952
]
]
]
sdot 119898119892 (A4)
Static moment vector points at the direction of k times 120585 and theexpression ofM
119911can be obtained as
M119911=[
[
[
0
minus sin 1205751sin120573 + sin 120575
2cos 1205751cos120573
sin 1205751
]
]
]
119876119897V21198981015840 (A5)
Transverse damping moment vector points at the oppositedirection of the NRRF spin-rate vector 120596
1 which can be
written as
M119911119911=
[
[
[
[
0
minus120596120578
minus120596120577
]
]
]
]
119876119897119889V1198981015840119911119911 (A6)
The axial damping moment vector in the NRRF is written as
M119909119911=[
[
[
1
0
0
]
]
]
sdot 119876119897119889V1205961205851198981015840
119909119911 (A7)
Magnus moment vector is induced by the Magnus forcepointing at the plane of AOA and M
119910points at direction of
120585 times (120585 times k) and is expressed as
M119910=[
[
[
0
sin 1205751cos120573 + sin 120575
2cos 1205751sin120573
sin 1205752cos 1205751
]
]
]
119876119897119889120596120585V11989810158401015840119910
(A8)
Canard forces 119865119901119889 119865119888119889
depending on steering canards anddifferential canard are expressed as
119865119901119889= 119876V2119888
119901119889
119865119888119889= 119876V2119888
119888119889
(A9)
Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
00 05 10 15 20 25 30 350
1
2
3
4
5
6
7
Mach number
Stat
ic ae
rody
nam
ic co
effici
ent
cy998400
mz998400
cx998400
(a) Static aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
0
10
20
Mach number
cz998400
mzz998400
mxz998400
my998400
Stat
ic ae
rody
nam
ic co
effici
ent
(b) Dynamic aerodynamic coefficients versus Mach number
00 05 10 15 20 25 30 35
000
001
Mach number
Cana
rd effi
cien
cy co
effici
ent
minus006
minus005
minus004
minus003
minus002
minus001
cpdmpd
ccdmcd
(c) Canard efficiency coefficients versus Mach number
00 05 10 15 20 25 30 35295
300
305
310
315
320
325
330
335
340
Mach number
Cen
ter o
f can
ard
pres
sure
coeffi
cien
t
X0
(d) Canard pressure center coefficient versus Mach number
Figure 7 Aerodynamic coefficients adopted in 6-DOF mathematical model
orientation indicates 297 deg Inconsistency can be seen fromthe impact point drift orientation and canard rolling angle
One of the influence factors is the nonconcentratedcontrol force orientation caused by the gyroscopic effectwhich can be reflected by the angularmotion of the projectileHowever the angular motion around the center of mass isindicated by the AOAI and the angular motion of velocityvector is indicated by the TARI To observe these angularmotions 3D curves of complex AOAI and TARI with timehistory are shown in Figures 9 and 10
Damped oscillation waves can be seen in numericalsolutions of complex AOAI and TARI with similar frequencyAccording to the control system stability criterion the angu-lar motions converge to steady state at about 20 sec aftercanard control started Therefore the adoptive prediction
orientations should be steady state value or trim value of theoscillation process
53 Analytical Angular Motion Results Combining with theknown meteorological parameters aerodynamic coefficientand rolling-angle 120574
119888 analytical solution of the AOAI is cal-
culated via (28a) and (28b) by using the controlled trajectoryparameters Moreover analytical solution of TARI is calcu-lated by (31a) (31b) and (31c) For the convenience of orienta-tion observation projection of analytical and numerical com-plex AOAI and TARI in plane of 119900-120578-120577 and 119900-119910
2-1199112is shown
in Figures 11 and 12 Due to the approximate process forthe deduction of analytical expression magnitude deviationcan be seen from the comparison However our attention isconcentrated in the orientation prediction By comparing
8 Mathematical Problems in Engineering
01
23
05001000150020000
5000
10000
15000
Hei
ght (
m)
Apogee point
Controlled IPP (298658 16404)
Uncontrolled IPP(296811 15548)
Launch point times104
Cross-range (m) Range (m)
Controlled trajectoryUncontrolled trajectory
Figure 8 Projectile 3D trajectory comparison
50 60 70 80 90 100 1100
Time (s)
Angle of slip side (deg)
Ang
le o
f in
cide
nce (
deg)
minus1
minus05
05minus05
0
05
1 70 s
Figure 9 3D curve of complex AOAI with time history
50 60 70 80 90 100 1100
002004
0
002
004
006
Time (s)
Deflection angular
rate (degs)
Tilt
angu
lar r
ate (
deg
s)
minus004minus002
minus002
70 s
Figure 10 3D curve of complex TARI with time history
the orientations of analytical solutions with numerical steadystate value well agreement can be seen in this case andanalytical orientations indicate the trim value of numericalorientations To discuss general applicability of analyticalorientation expressions for TARI and swerving incrementmore simulations are implemented in the following section
00 02 04 06
00
04
08
12
Numerical solutionAnalytical solution
minus06 minus04 minus02
1205752c (rad)
1205751c
(rad
)Figure 11 Projection of complex AOAI in plane of 119900-120578-120577
000 002 004 006
000
002
004
006
Analytical solutionNumerical solution
minus002minus002
120579a
(rad
s)
1205952 (rads)
Figure 12 Projection of complex TARI in plane of 119900-1199102-1199112
54 Orientation Prediction Under different conditions ana-lytical and numerical orientations of TARI and swervingincrement were calculated The start time of control periodis set at the apogee point 15 s later and 30 s later The initialelevations are set as 50 deg 40 deg and 30 deg The numer-ical and analytical orientations of TARI and swerving incre-ment are drawn in Figures 13 14 and 15
As seen from the left side figures analytical TARI orienta-tions are not affected by initial elevation and control start timeand appear as trim value of numerical orientations Considerthat the deviations between numerical and analytical orienta-tions achieve steady state when the amplitude of oscillation is
Mathematical Problems in Engineering 9
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
7 s10 sStart time 80 sStart time 65 s
Start time 50 s
16 s
120601TA
RI(r
ad)
(a) TARI orientation
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
Start time 80 sStart time 65 sStart time 50 s
3s7 s12 s
120601SW
ER(r
ad)
(b) Swerving increment orientation
Figure 13 Numerical and analytical results under initial elevation 50 deg
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601TA
RI(r
ad)
45 sStart time 67 s
7 s
Start time 37 sStart time 52 s
12 s
Numerical solutionAnalytical solution
(a) TARI orientation
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 67 sStart time 37 s Start time 52 s
2 s4 s5 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 14 Numerical and analytical results under initial elevation 40 deg
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601TA
RI(r
ad)
6 s Start time 59 s
Start time 44 s
6 s
Start time 29 s
7 s
Numerical solutionAnalytical solution
(a) TARI orientation
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 59 sStart time 44 sStart time 29 s
2 s3 s3 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 15 Numerical and analytical results under initial elevation 30 deg
less than 10 deg Convergence time for the deviation reachingsteady state is recorded For each initial elevation closercontrol start time to the end of flight costs less convergencetime and for different initial elevations lower initial elevationangle costs less convergence time
As seen from the right side figures no oscillation processis indicated from the deviation between numerical and ana-lytical swerving increment orientations The deviations arefirstly decreased during the beginning of control period and
then negative deviations increased and time durations for thedeviations decreasing to less than 10 deg are recorded Simi-lar law can be seen from the recorded orientation deviationdecreasing time of TARI and swerving increment and theswerving increment orientation deviations are converged in ashorter time than the TARI orientation deviations under thesame initial elevation It is worth noting that at the start timeof 59 sec in Figure 15 the numerical TARI orientation reachesthe critical divergence state and the analytical orientation still
10 Mathematical Problems in Engineering
represents trim value of the oscillation processMoreover theanalytical and numerical solution of swerving orientationsshows little affection by the critical divergence state of TARI
6 Conclusions
This paper focuses on the swerving orientation prediction forthe square crossing fixed-cant canard configuration Analyt-ical expressions of TARI and swerving increment orientationare deduced without the attitude information Based on thesimulations under different initial elevation and control timeconditions the following conclusions can be obtained
(1) Analytical orientations of TARI and swerving incre-ment indicate the trim value of the numerical orien-tations Deviations between numerical and analyticalorientations converge in period of time after controlstarted
(2) For each initial elevation closer control start timesto the end of flight cost less convergence time Fordifferent initial elevations lower initial elevation costsless convergence time
(3) Based on the target trajectory angular rate orientationor target swerving orientation provided by navigationsystem the desired rolling angle of canard frame canbe determined by the reverse solution of incrementorientation analytical expressions By setting appro-priate control start time and duration cost-effectiveguidance strategy involving no empirical formula forfixed-cant canard configurationwill be accomplished
Appendix
Force and Moment Expressions
The direction of drag vector points at the negative 1199092 in the
VRF the expression of R119909can be written as
R119909=[
[
[
minus1
0
0
]
]
]
sdot 119876V2119888119909 (A1)
Lift vector was obtained by transforming the normal force inthe NRRF and the short form of R
119910is
R119910=[
[
[
cos 1205752cos 1205751minus 1
cos 1205752sin 1205751
sin 1205752
]
]
]
sdot 119876V21198881015840119910 (A2)
Direction of the Magnus force vector points at the directionof k times 120585 and the expression of R
119911is
R119911=[
[
[
0
sin 1205752
minus cos 1205752sin 1205751
]
]
]
sdot 119876V21198881015840119911 (A3)
Expression of the gravity vector in the VRF can be written as
G =[
[
[
sin 120579119886cos1205952
cos 120579119886
sin 120579119886sin1205952
]
]
]
sdot 119898119892 (A4)
Static moment vector points at the direction of k times 120585 and theexpression ofM
119911can be obtained as
M119911=[
[
[
0
minus sin 1205751sin120573 + sin 120575
2cos 1205751cos120573
sin 1205751
]
]
]
119876119897V21198981015840 (A5)
Transverse damping moment vector points at the oppositedirection of the NRRF spin-rate vector 120596
1 which can be
written as
M119911119911=
[
[
[
[
0
minus120596120578
minus120596120577
]
]
]
]
119876119897119889V1198981015840119911119911 (A6)
The axial damping moment vector in the NRRF is written as
M119909119911=[
[
[
1
0
0
]
]
]
sdot 119876119897119889V1205961205851198981015840
119909119911 (A7)
Magnus moment vector is induced by the Magnus forcepointing at the plane of AOA and M
119910points at direction of
120585 times (120585 times k) and is expressed as
M119910=[
[
[
0
sin 1205751cos120573 + sin 120575
2cos 1205751sin120573
sin 1205752cos 1205751
]
]
]
119876119897119889120596120585V11989810158401015840119910
(A8)
Canard forces 119865119901119889 119865119888119889
depending on steering canards anddifferential canard are expressed as
119865119901119889= 119876V2119888
119901119889
119865119888119889= 119876V2119888
119888119889
(A9)
Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
01
23
05001000150020000
5000
10000
15000
Hei
ght (
m)
Apogee point
Controlled IPP (298658 16404)
Uncontrolled IPP(296811 15548)
Launch point times104
Cross-range (m) Range (m)
Controlled trajectoryUncontrolled trajectory
Figure 8 Projectile 3D trajectory comparison
50 60 70 80 90 100 1100
Time (s)
Angle of slip side (deg)
Ang
le o
f in
cide
nce (
deg)
minus1
minus05
05minus05
0
05
1 70 s
Figure 9 3D curve of complex AOAI with time history
50 60 70 80 90 100 1100
002004
0
002
004
006
Time (s)
Deflection angular
rate (degs)
Tilt
angu
lar r
ate (
deg
s)
minus004minus002
minus002
70 s
Figure 10 3D curve of complex TARI with time history
the orientations of analytical solutions with numerical steadystate value well agreement can be seen in this case andanalytical orientations indicate the trim value of numericalorientations To discuss general applicability of analyticalorientation expressions for TARI and swerving incrementmore simulations are implemented in the following section
00 02 04 06
00
04
08
12
Numerical solutionAnalytical solution
minus06 minus04 minus02
1205752c (rad)
1205751c
(rad
)Figure 11 Projection of complex AOAI in plane of 119900-120578-120577
000 002 004 006
000
002
004
006
Analytical solutionNumerical solution
minus002minus002
120579a
(rad
s)
1205952 (rads)
Figure 12 Projection of complex TARI in plane of 119900-1199102-1199112
54 Orientation Prediction Under different conditions ana-lytical and numerical orientations of TARI and swervingincrement were calculated The start time of control periodis set at the apogee point 15 s later and 30 s later The initialelevations are set as 50 deg 40 deg and 30 deg The numer-ical and analytical orientations of TARI and swerving incre-ment are drawn in Figures 13 14 and 15
As seen from the left side figures analytical TARI orienta-tions are not affected by initial elevation and control start timeand appear as trim value of numerical orientations Considerthat the deviations between numerical and analytical orienta-tions achieve steady state when the amplitude of oscillation is
Mathematical Problems in Engineering 9
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
7 s10 sStart time 80 sStart time 65 s
Start time 50 s
16 s
120601TA
RI(r
ad)
(a) TARI orientation
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
Start time 80 sStart time 65 sStart time 50 s
3s7 s12 s
120601SW
ER(r
ad)
(b) Swerving increment orientation
Figure 13 Numerical and analytical results under initial elevation 50 deg
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601TA
RI(r
ad)
45 sStart time 67 s
7 s
Start time 37 sStart time 52 s
12 s
Numerical solutionAnalytical solution
(a) TARI orientation
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 67 sStart time 37 s Start time 52 s
2 s4 s5 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 14 Numerical and analytical results under initial elevation 40 deg
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601TA
RI(r
ad)
6 s Start time 59 s
Start time 44 s
6 s
Start time 29 s
7 s
Numerical solutionAnalytical solution
(a) TARI orientation
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 59 sStart time 44 sStart time 29 s
2 s3 s3 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 15 Numerical and analytical results under initial elevation 30 deg
less than 10 deg Convergence time for the deviation reachingsteady state is recorded For each initial elevation closercontrol start time to the end of flight costs less convergencetime and for different initial elevations lower initial elevationangle costs less convergence time
As seen from the right side figures no oscillation processis indicated from the deviation between numerical and ana-lytical swerving increment orientations The deviations arefirstly decreased during the beginning of control period and
then negative deviations increased and time durations for thedeviations decreasing to less than 10 deg are recorded Simi-lar law can be seen from the recorded orientation deviationdecreasing time of TARI and swerving increment and theswerving increment orientation deviations are converged in ashorter time than the TARI orientation deviations under thesame initial elevation It is worth noting that at the start timeof 59 sec in Figure 15 the numerical TARI orientation reachesthe critical divergence state and the analytical orientation still
10 Mathematical Problems in Engineering
represents trim value of the oscillation processMoreover theanalytical and numerical solution of swerving orientationsshows little affection by the critical divergence state of TARI
6 Conclusions
This paper focuses on the swerving orientation prediction forthe square crossing fixed-cant canard configuration Analyt-ical expressions of TARI and swerving increment orientationare deduced without the attitude information Based on thesimulations under different initial elevation and control timeconditions the following conclusions can be obtained
(1) Analytical orientations of TARI and swerving incre-ment indicate the trim value of the numerical orien-tations Deviations between numerical and analyticalorientations converge in period of time after controlstarted
(2) For each initial elevation closer control start timesto the end of flight cost less convergence time Fordifferent initial elevations lower initial elevation costsless convergence time
(3) Based on the target trajectory angular rate orientationor target swerving orientation provided by navigationsystem the desired rolling angle of canard frame canbe determined by the reverse solution of incrementorientation analytical expressions By setting appro-priate control start time and duration cost-effectiveguidance strategy involving no empirical formula forfixed-cant canard configurationwill be accomplished
Appendix
Force and Moment Expressions
The direction of drag vector points at the negative 1199092 in the
VRF the expression of R119909can be written as
R119909=[
[
[
minus1
0
0
]
]
]
sdot 119876V2119888119909 (A1)
Lift vector was obtained by transforming the normal force inthe NRRF and the short form of R
119910is
R119910=[
[
[
cos 1205752cos 1205751minus 1
cos 1205752sin 1205751
sin 1205752
]
]
]
sdot 119876V21198881015840119910 (A2)
Direction of the Magnus force vector points at the directionof k times 120585 and the expression of R
119911is
R119911=[
[
[
0
sin 1205752
minus cos 1205752sin 1205751
]
]
]
sdot 119876V21198881015840119911 (A3)
Expression of the gravity vector in the VRF can be written as
G =[
[
[
sin 120579119886cos1205952
cos 120579119886
sin 120579119886sin1205952
]
]
]
sdot 119898119892 (A4)
Static moment vector points at the direction of k times 120585 and theexpression ofM
119911can be obtained as
M119911=[
[
[
0
minus sin 1205751sin120573 + sin 120575
2cos 1205751cos120573
sin 1205751
]
]
]
119876119897V21198981015840 (A5)
Transverse damping moment vector points at the oppositedirection of the NRRF spin-rate vector 120596
1 which can be
written as
M119911119911=
[
[
[
[
0
minus120596120578
minus120596120577
]
]
]
]
119876119897119889V1198981015840119911119911 (A6)
The axial damping moment vector in the NRRF is written as
M119909119911=[
[
[
1
0
0
]
]
]
sdot 119876119897119889V1205961205851198981015840
119909119911 (A7)
Magnus moment vector is induced by the Magnus forcepointing at the plane of AOA and M
119910points at direction of
120585 times (120585 times k) and is expressed as
M119910=[
[
[
0
sin 1205751cos120573 + sin 120575
2cos 1205751sin120573
sin 1205752cos 1205751
]
]
]
119876119897119889120596120585V11989810158401015840119910
(A8)
Canard forces 119865119901119889 119865119888119889
depending on steering canards anddifferential canard are expressed as
119865119901119889= 119876V2119888
119901119889
119865119888119889= 119876V2119888
119888119889
(A9)
Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
7 s10 sStart time 80 sStart time 65 s
Start time 50 s
16 s
120601TA
RI(r
ad)
(a) TARI orientation
50 55 60 65 70 75 80 85 90 95 100
060
120180240300360
Time (s)
Numerical solutionAnalytical solution
Start time 80 sStart time 65 sStart time 50 s
3s7 s12 s
120601SW
ER(r
ad)
(b) Swerving increment orientation
Figure 13 Numerical and analytical results under initial elevation 50 deg
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601TA
RI(r
ad)
45 sStart time 67 s
7 s
Start time 37 sStart time 52 s
12 s
Numerical solutionAnalytical solution
(a) TARI orientation
40 45 50 55 60 65 70 75 80 85
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 67 sStart time 37 s Start time 52 s
2 s4 s5 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 14 Numerical and analytical results under initial elevation 40 deg
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601TA
RI(r
ad)
6 s Start time 59 s
Start time 44 s
6 s
Start time 29 s
7 s
Numerical solutionAnalytical solution
(a) TARI orientation
30 35 40 45 50 55 60 65
060
120180240300360
Time (s)
120601SW
ER(r
ad)
Start time 59 sStart time 44 sStart time 29 s
2 s3 s3 s
Numerical solutionAnalytical solution
(b) Swerving increment orientation
Figure 15 Numerical and analytical results under initial elevation 30 deg
less than 10 deg Convergence time for the deviation reachingsteady state is recorded For each initial elevation closercontrol start time to the end of flight costs less convergencetime and for different initial elevations lower initial elevationangle costs less convergence time
As seen from the right side figures no oscillation processis indicated from the deviation between numerical and ana-lytical swerving increment orientations The deviations arefirstly decreased during the beginning of control period and
then negative deviations increased and time durations for thedeviations decreasing to less than 10 deg are recorded Simi-lar law can be seen from the recorded orientation deviationdecreasing time of TARI and swerving increment and theswerving increment orientation deviations are converged in ashorter time than the TARI orientation deviations under thesame initial elevation It is worth noting that at the start timeof 59 sec in Figure 15 the numerical TARI orientation reachesthe critical divergence state and the analytical orientation still
10 Mathematical Problems in Engineering
represents trim value of the oscillation processMoreover theanalytical and numerical solution of swerving orientationsshows little affection by the critical divergence state of TARI
6 Conclusions
This paper focuses on the swerving orientation prediction forthe square crossing fixed-cant canard configuration Analyt-ical expressions of TARI and swerving increment orientationare deduced without the attitude information Based on thesimulations under different initial elevation and control timeconditions the following conclusions can be obtained
(1) Analytical orientations of TARI and swerving incre-ment indicate the trim value of the numerical orien-tations Deviations between numerical and analyticalorientations converge in period of time after controlstarted
(2) For each initial elevation closer control start timesto the end of flight cost less convergence time Fordifferent initial elevations lower initial elevation costsless convergence time
(3) Based on the target trajectory angular rate orientationor target swerving orientation provided by navigationsystem the desired rolling angle of canard frame canbe determined by the reverse solution of incrementorientation analytical expressions By setting appro-priate control start time and duration cost-effectiveguidance strategy involving no empirical formula forfixed-cant canard configurationwill be accomplished
Appendix
Force and Moment Expressions
The direction of drag vector points at the negative 1199092 in the
VRF the expression of R119909can be written as
R119909=[
[
[
minus1
0
0
]
]
]
sdot 119876V2119888119909 (A1)
Lift vector was obtained by transforming the normal force inthe NRRF and the short form of R
119910is
R119910=[
[
[
cos 1205752cos 1205751minus 1
cos 1205752sin 1205751
sin 1205752
]
]
]
sdot 119876V21198881015840119910 (A2)
Direction of the Magnus force vector points at the directionof k times 120585 and the expression of R
119911is
R119911=[
[
[
0
sin 1205752
minus cos 1205752sin 1205751
]
]
]
sdot 119876V21198881015840119911 (A3)
Expression of the gravity vector in the VRF can be written as
G =[
[
[
sin 120579119886cos1205952
cos 120579119886
sin 120579119886sin1205952
]
]
]
sdot 119898119892 (A4)
Static moment vector points at the direction of k times 120585 and theexpression ofM
119911can be obtained as
M119911=[
[
[
0
minus sin 1205751sin120573 + sin 120575
2cos 1205751cos120573
sin 1205751
]
]
]
119876119897V21198981015840 (A5)
Transverse damping moment vector points at the oppositedirection of the NRRF spin-rate vector 120596
1 which can be
written as
M119911119911=
[
[
[
[
0
minus120596120578
minus120596120577
]
]
]
]
119876119897119889V1198981015840119911119911 (A6)
The axial damping moment vector in the NRRF is written as
M119909119911=[
[
[
1
0
0
]
]
]
sdot 119876119897119889V1205961205851198981015840
119909119911 (A7)
Magnus moment vector is induced by the Magnus forcepointing at the plane of AOA and M
119910points at direction of
120585 times (120585 times k) and is expressed as
M119910=[
[
[
0
sin 1205751cos120573 + sin 120575
2cos 1205751sin120573
sin 1205752cos 1205751
]
]
]
119876119897119889120596120585V11989810158401015840119910
(A8)
Canard forces 119865119901119889 119865119888119889
depending on steering canards anddifferential canard are expressed as
119865119901119889= 119876V2119888
119901119889
119865119888119889= 119876V2119888
119888119889
(A9)
Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
represents trim value of the oscillation processMoreover theanalytical and numerical solution of swerving orientationsshows little affection by the critical divergence state of TARI
6 Conclusions
This paper focuses on the swerving orientation prediction forthe square crossing fixed-cant canard configuration Analyt-ical expressions of TARI and swerving increment orientationare deduced without the attitude information Based on thesimulations under different initial elevation and control timeconditions the following conclusions can be obtained
(1) Analytical orientations of TARI and swerving incre-ment indicate the trim value of the numerical orien-tations Deviations between numerical and analyticalorientations converge in period of time after controlstarted
(2) For each initial elevation closer control start timesto the end of flight cost less convergence time Fordifferent initial elevations lower initial elevation costsless convergence time
(3) Based on the target trajectory angular rate orientationor target swerving orientation provided by navigationsystem the desired rolling angle of canard frame canbe determined by the reverse solution of incrementorientation analytical expressions By setting appro-priate control start time and duration cost-effectiveguidance strategy involving no empirical formula forfixed-cant canard configurationwill be accomplished
Appendix
Force and Moment Expressions
The direction of drag vector points at the negative 1199092 in the
VRF the expression of R119909can be written as
R119909=[
[
[
minus1
0
0
]
]
]
sdot 119876V2119888119909 (A1)
Lift vector was obtained by transforming the normal force inthe NRRF and the short form of R
119910is
R119910=[
[
[
cos 1205752cos 1205751minus 1
cos 1205752sin 1205751
sin 1205752
]
]
]
sdot 119876V21198881015840119910 (A2)
Direction of the Magnus force vector points at the directionof k times 120585 and the expression of R
119911is
R119911=[
[
[
0
sin 1205752
minus cos 1205752sin 1205751
]
]
]
sdot 119876V21198881015840119911 (A3)
Expression of the gravity vector in the VRF can be written as
G =[
[
[
sin 120579119886cos1205952
cos 120579119886
sin 120579119886sin1205952
]
]
]
sdot 119898119892 (A4)
Static moment vector points at the direction of k times 120585 and theexpression ofM
119911can be obtained as
M119911=[
[
[
0
minus sin 1205751sin120573 + sin 120575
2cos 1205751cos120573
sin 1205751
]
]
]
119876119897V21198981015840 (A5)
Transverse damping moment vector points at the oppositedirection of the NRRF spin-rate vector 120596
1 which can be
written as
M119911119911=
[
[
[
[
0
minus120596120578
minus120596120577
]
]
]
]
119876119897119889V1198981015840119911119911 (A6)
The axial damping moment vector in the NRRF is written as
M119909119911=[
[
[
1
0
0
]
]
]
sdot 119876119897119889V1205961205851198981015840
119909119911 (A7)
Magnus moment vector is induced by the Magnus forcepointing at the plane of AOA and M
119910points at direction of
120585 times (120585 times k) and is expressed as
M119910=[
[
[
0
sin 1205751cos120573 + sin 120575
2cos 1205751sin120573
sin 1205752cos 1205751
]
]
]
119876119897119889120596120585V11989810158401015840119910
(A8)
Canard forces 119865119901119889 119865119888119889
depending on steering canards anddifferential canard are expressed as
119865119901119889= 119876V2119888
119901119889
119865119888119889= 119876V2119888
119888119889
(A9)
Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
Notations
119898 Projectile mass119905 Time119904 Trajectory arc119860 Transverse moment of inertia119862 Projectile axial moment of inertia119897 Reference length119889 Projectile diameter119878 Reference area119892 Acceleration of gravity119883119888 Axial distance between mass center and
bottom end of projectile1198830 Axial distance between mass center and
pressure center of canard frame119876 Dynamic pressure1198881015840
119909 Projectile drag coefficient derivative
1198881015840
119910 Projectile lift coefficient derivative
1198881015840
119911 Magnus force coefficient derivative
1198881015840
119888119889 Differential canard force coefficient
derivative1198881015840
119901119889 Steering canard force coefficient derivative
1198981015840
119911 Projectile static moment coefficient
derivative1198981015840
119911119911 Transverse damping moment coefficient
derivative1198981015840
119909119911 Projectile roll damping moment
coefficient11989810158401015840
119910 Magnus moment coefficient two-order
derivative1198981015840
119888119889 Differential canard moment coefficient
derivative1198981015840
119901119889 Steering canard moment coefficient
derivativeV Projectile velocityV Time derivative of projectile velocityV1015840 Trajectory arc derivative of projectile
velocity120579119886 1205952 Trajectory pathdeflection angle
120579119886 2 Trajectory pathdeflection angular rate
120574 Projectile spin rate120593119886 1205932 Euler pitchyaw angle
120596120585 120596120578 120596120577 Euler angular rate
12057512 Angle of attack
12057511198882119888
Angle of attack increment induced bycanard control force
120574119888 Canard rolling angle
1198651199092 1198651199102 1198651199112 Force component in the VRF
119872120585119872120578119872120577 Moment component in axis coordinate
R119909 Drag vector
R119910 Lift vector
R119911 Magnus force vector
G Gravity vectorM119909119911 Axial damping moment vector
M119911 Static moment vector
M119911119911 Transverse damping moment vector
M119910 Magnus moment vector
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of the paper
References
[1] S Chang Z Wang and T Liu ldquoAnalysis of spin-rate propertyfor dual-spin-stabilized projectiles with canardsrdquo Journal ofSpacecraft and Rockets vol 51 no 3 pp 958ndash966 2014
[2] F Fresconi and P Plostins ldquoControl mechanism strategiesfor spin-stabilized projectilesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 224 no 9 pp 979ndash991 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofasymmetric projectiles with control mechanismsrdquo in Proceed-ings of the AIAA Atmospheric Flight Mechanics ConferenceToronto Canada August 2010
[4] D Zhu S Tang J Guo and R Chen ldquoFlight stability of a dual-spin projectile with canardsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2014
[5] S Theodoulis V Gassmann P Wernert L Dritsas I Kitsiosand A Tzes ldquoGuidance and control design for a class of spin-stabilized fin-controlled projectilesrdquo Journal of Guidance Con-trol and Dynamics vol 36 no 2 pp 517ndash531 2013
[6] F Seve S Theodoulis P Wernert M Zasadzinski and MBoutayeb ldquoPitchYaw channels control design for a 155mmpro-jectile with rotating canards using a119867
infinLoop-Shaping design
procedurerdquo in Proceedings of the AIAA Guidance Navigationand Control Conference AIAA 2014-1474 2014
[7] E Gagnon and M Lauzon ldquoCourse correction fuze conceptanalysis for in-service 155mm spin-stabilized gunnery projec-tilesrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference andExhibit HonoluluHawaiiUSAAugust2008
[8] S Theodoulis I Kitsios L Dritsas A Tzes and P WernertldquoAutopilot strategies of guided projectiles for terminal guid-ancerdquo in Proceedings of the 19th Mediterranean Conference onControl and Automation (MED rsquo11) pp 248ndash253 June 2011
[9] F Fresconi ldquoGuidance and control of a projectile with reducedsensor and actuator requirementsrdquo Journal of Guidance Con-trol and Dynamics vol 34 no 6 pp 1757ndash1766 2011
[10] D Storsved ldquoPGK and the impact of affordable precision on thefires missionrdquo in Proceedings of 43rd Annual Guns amp MissilesSymposium DTIC New Orleans La USA 2008
[11] J A Clancy T D Bybee andWA Friedrich ldquoFixed canard 2-Dguidance of artillery projectilesrdquo Patent US 6981672 B2-ZHUSA 2006
[12] B Burchett A Peterson andM Costello ldquoPrediction of swerv-ing motion of a dual-spin projectile with lateral pulse jets inatmospheric flightrdquoMathematical and ComputerModelling vol35 no 7-8 pp 821ndash834 2002
[13] D Ollerenshaw and M Costello ldquoSimplified projectile swervesolution for general control inputsrdquo Journal of Guidance Con-trol and Dynamics vol 31 no 5 pp 1259ndash1265 2008
[14] C H Murphy ldquoGravity- induced angular motion of a spinningmissilerdquo Journal of Spacecraft and Rockets vol 8 no 8 pp 824ndash828 1971
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of