Research Article Equilibrium Positions for UAV Flight by ...
9
Research Article Equilibrium Positions for UAV Flight by Dynamic Soaring Bingjie Zhu, 1 Zhongxi Hou, 1 Shangqiu Shan, 1 and Xinzhu Wang 2 1 College of Aerospace Sciences and Engineering, National University of Defense Technology, Changsha, Hunan 410073, China 2 Chongqing Key Laboratory of Heterogeneous Material Mechanics, Department of Engineering Mechanics, Postdoctoral Station of Mechanics, Chongqing University, Chongqing 400040, China Correspondence should be addressed to Bingjie Zhu; [email protected] Received 23 June 2015; Revised 22 September 2015; Accepted 30 September 2015 Academic Editor: Hyochoong Bang Copyright © 2015 Bingjie Zhu et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Dynamic soaring is a special flying technique designed to allow UAVs (unmanned aerial vehicles) to extract energy from wind gradient field and enable UAVs to increase the endurance. In order to figure out the energy-extraction mechanisms in dynamic soaring, a noninertial wind relative reference frame of aircraſt is built. In the noninertial frame, there is an inertial force which is created by gradient wind field. When the wind gradient ( ) and the components of airspeed (V V ) are positive, inertial force () makes positive work to the aircraſt. In the meantime, an equilibrium position theory of dynamic soaring is proposed. At the equilibrium positions, the increased potential energy is greater than the wasted kinetic energy when the aircraſt is flying upwards. e mechanical energy is increased in this way, and the aircraſt can store energy for flight. According to the extreme value theory, contour line figures of the maximum function and the component of airspeed (V ) are obtained to find out the aircraſt’s liſting balance allowance in dynamic soaring. Moreover, this equilibrium position theory can also help to conduct an aircraſt to acquire energy from the environment constantly. 1. Introduction Long endurance flight is a key design criterion for unmanned aerial vehicle [1]. e UAVs’ flight endurance can be improved by the progress in power capacity and aerodynamic and engine design [2], but not all such means are equal. Another important alternative for enhancing UAV flight endurance is to seek energy from flight environment. In nature, there are many large-sized birds which make use of environment energy to enhance their flight ability, such as wandering albatross who extracts energy from horizontally moving air and transfers energy to itself. e achieved energy enables wandering albatrosses to fly continuously without flapping their wings [3, 4]. e flight manoeuvre that wandering albatross performs is referred to as dynamic soaring [5]. Early in 1883, Lord Rayleigh published “e Soaring of Birds” in Nature [6], which is regarded as the first paper about dynamic soaring. Dynamic soaring is possible when there is hori- zontally moving air in the flight environment. Horizontally moving air is also called gradient wind, in which wind speed varies with altitude. In this paper, both the size of the wandering albatrosses with its 3.3 m wing span and its flight performance are taken as a reference model against the dynamic soaring performance of a small UAV. Dynamic soaring is an important flight technique de- signed to allow aircraſt to extract energy from atmosphere. Based on Lord Rayleigh’s observations of albatrosses in the south Atlantic, more recent publications are concerned with wind estimated and dynamic soaring mechanism. In order to estimate wind field for autonomous dynamic soaring, Lawrance et al. [7, 8] provided a method for taking direct observations of the wind during flight and creating a wind to direct future exploration. e wind estimation is the pre- condition for dynamic soaring. In this paper, a mathematical model is built for the wind field. As for dynamic soaring mechanism, Grenestedt [9] provided insight into how and where energy is extracted from the wind during dynamic soaring. e effects of some aircraſt parameters such as mass, drag area, and wing span were discussed. Bower [5] studied the energy transfer mechanisms for a vehicle flying in a spatially and temporally varying wind field. Deittert et al. [10] investigated optimal trajectories for minimal and maximal wind conditions, and the likelihood of favorable winds was predicted based on long-term weather statics and knowledge Hindawi Publishing Corporation International Journal of Aerospace Engineering Volume 2015, Article ID 141906, 8 pages http://dx.doi.org/10.1155/2015/141906
Transcript of Research Article Equilibrium Positions for UAV Flight by ...

Research ArticleEquilibrium Positions for UAV Flight by Dynamic Soaring
Bingjie Zhu1 Zhongxi Hou1 Shangqiu Shan1 and Xinzhu Wang2
1College of Aerospace Sciences and Engineering National University of Defense Technology Changsha Hunan 410073 China2Chongqing Key Laboratory of Heterogeneous Material Mechanics Department of Engineering MechanicsPostdoctoral Station of Mechanics Chongqing University Chongqing 400040 China
Correspondence should be addressed to Bingjie Zhu jackerzhu163com
Received 23 June 2015 Revised 22 September 2015 Accepted 30 September 2015
Academic Editor Hyochoong Bang
Copyright copy 2015 Bingjie Zhu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Dynamic soaring is a special flying technique designed to allow UAVs (unmanned aerial vehicles) to extract energy from windgradient field and enable UAVs to increase the endurance In order to figure out the energy-extraction mechanisms in dynamicsoaring a noninertial wind relative reference frame of aircraft is built In the noninertial frame there is an inertial force which iscreated by gradient wind field When the wind gradient (119866
119882) and the components of airspeed (V
119911V119909) are positive inertial force
(119865) makes positive work to the aircraft In the meantime an equilibrium position theory of dynamic soaring is proposed At theequilibrium positions the increased potential energy is greater than the wasted kinetic energy when the aircraft is flying upwardsThe mechanical energy is increased in this way and the aircraft can store energy for flight According to the extreme value theorycontour line figures of the maximum function and the component of airspeed (V
119911) are obtained to find out the aircraftrsquos lifting
balance allowance in dynamic soaring Moreover this equilibrium position theory can also help to conduct an aircraft to acquireenergy from the environment constantly
1 Introduction
Long endurance flight is a key design criterion for unmannedaerial vehicle [1]TheUAVsrsquo flight endurance can be improvedby the progress in power capacity and aerodynamic andengine design [2] but not all such means are equal Anotherimportant alternative for enhancing UAV flight enduranceis to seek energy from flight environment In nature thereare many large-sized birds which make use of environmentenergy to enhance their flight ability such as wanderingalbatross who extracts energy from horizontally moving airand transfers energy to itself The achieved energy enableswandering albatrosses to fly continuously without flappingtheir wings [3 4] The flight manoeuvre that wanderingalbatross performs is referred to as dynamic soaring [5] Earlyin 1883 Lord Rayleigh published ldquoThe Soaring of Birdsrdquo inNature [6] which is regarded as the first paper about dynamicsoaring Dynamic soaring is possible when there is hori-zontally moving air in the flight environment Horizontallymoving air is also called gradient wind in which windspeed varies with altitude In this paper both the size ofthe wandering albatrosses with its 33m wing span and its
flight performance are taken as a reference model against thedynamic soaring performance of a small UAV
Dynamic soaring is an important flight technique de-signed to allow aircraft to extract energy from atmosphereBased on Lord Rayleighrsquos observations of albatrosses in thesouth Atlantic more recent publications are concerned withwind estimated and dynamic soaring mechanism In orderto estimate wind field for autonomous dynamic soaringLawrance et al [7 8] provided a method for taking directobservations of the wind during flight and creating a windto direct future exploration The wind estimation is the pre-condition for dynamic soaring In this paper a mathematicalmodel is built for the wind field As for dynamic soaringmechanism Grenestedt [9] provided insight into how andwhere energy is extracted from the wind during dynamicsoaringThe effects of some aircraft parameters such as massdrag area and wing span were discussed Bower [5] studiedthe energy transfer mechanisms for a vehicle flying in aspatially and temporally varying wind field Deittert et al [10]investigated optimal trajectories for minimal and maximalwind conditions and the likelihood of favorable winds waspredicted based on long-term weather statics and knowledge
Hindawi Publishing CorporationInternational Journal of Aerospace EngineeringVolume 2015 Article ID 141906 8 pageshttpdxdoiorg1011552015141906
2 International Journal of Aerospace Engineering
of minimal and maximal permissible wind strengths Cone[11] analyzed the dynamic soaring flight of albatross withmathematical models Peter [12] draw a conclusion that in anenergy neutral cycle of dynamic soaring whether the vehiclereturns to initial velocity and height with no power inputdepends only upon the maximum lift-to-drag ratio of thevehicle and the wind speed variation
Scores of research findings reveal the significant meaningof dynamic soaring Based on the achievements of thesefindings some new ideas are studied in this paper Theauthors first extend the idea of Grenestedt [9] by investigatingthe equilibrium position of dynamic soaring and providinginsight into energy variation in equilibrium position Thesame as other flight styles they applied forces on the aircraftfor dynamic soaring varying continuouslyThen there shouldbe some positions of forces balance in the course of flightAt these points the aircraft stays in a certain speed with nokinetic energy loss Of course if all the points could chain aclosed route the permanent flying would come true when theaircraft flies along the route
The rest of the paper is organized as follows the method-ology is described in Section 2 including the wind gradientand the mathematical models for the UAV Section 3 issimulation results and associated discussion Finally theconcluding remarks are made in Section 4
2 Mathematical Formulations of the Problem
Inspired by the forces analysis methods in dynamic soaringsuggested by Bower [5] and Deittert et al [10] the problemof equilibrium position for dynamic soaring is analyzedintensively in this paper The parameters that can influencethe equilibrium position include the range of airspeed thesize of wind gradient and other parameters Meanwhile themaximum value of energy acquired in the equilibrium pointis analyzed Once the parameters of an aircraft are known thewind gradient suited for the equilibrium position of dynamicsoaring can be determined Similarly in a known wind fieldthe type of aircraft that has equilibrium point in dynamicsoaring can be found out A set of computationalmethods forequilibrium position of dynamic soaring is established Thepurpose of this section is to provide a theoretical guidancefor the optimal dynamic soaring trajectory by means of theanalysis of equilibrium position of dynamic soaring Dueto no kinetic energy loss in the position of forces balancethe mechanical energy increases with increasing value ofpotential energy of the aircraft in the course of upwardflying
21 The Wind Field Model It is assumed that the air-craft flies over a flat surface and the wind field is steadyThere is a horizontal shear flow of the air in the three-dimensional space The flow of the air causes the windspeed to increase with increasing height above the groundThe air density is assumed to be constant The wind blowsalong the negative direction of 119909-axis the positive 119911-axispoints to the sky and the direction of 119910-axis is dependenton right-handed rule The relation between wind speed
0 3 6 9 12 150
20
40
60
80
100
W (ms)
z (m
)
Wind speedWind gradient
Figure 1 Wind speed and wind gradient
119882(119911) and height above the surface 119911 is defined as follows[13 14]
119882(119911) = 119882refln (119911119911
0)
ln (119911ref1199110) (1)
where 119882(119911) is the wind speed at height 119911 and 119882ref is thewind speed at the reference height 119911ref The variable 119911
0is the
aerodynamic roughness length or the roughness factor It isan experimentally derived constant that accounts for the kindof surface over which the wind is blowing Typically a highervalue of the roughness length indicates more obstructionson the surface such as trees and buildings By differentiating(1) with respect to altitude the following equation can beobtained
(119911) =119882ref
ln (119911ref1199110) sdot 119911= 119866119882 (2)
where 119866119882
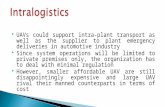
is the gradient of the wind field The variationtrends of wind profile and wind gradient profile are depictedin Figure 1
Figure 1 shows the wind profile and wind gradient profilefor value of the roughness coefficient with 119882ref = 15ms119911ref = 100m and 119911
0= 005m
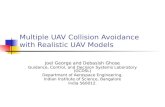
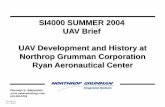
22 FlyingModel According to the observed data of dynamicsoaring [4] the albatross climbs with headwind and thewindspeed increases with the increasing of flight height Afterturning in high altitude the albatross glides with leewardand the wind speed decreases with the descending of flightheight An illustration of a typical dynamic soaring trajectoryis shown in Figure 2
Compared with Earth fixed frame the wind relativereference frame of aircraft is not inertial frame in the windfield So there is an inertial force 119865
119894that works on the aircraft
A noninertial frame is defined which is the wind relativereference frame of aircraft In the noninertial frame there arefour applied forces accounted for the aircraft lift force (119871)drag force (119863) gravitational force (119898119892) and inertial force(119865119894) The inertial force is created by wind so the direction of
International Journal of Aerospace Engineering 3
Wx
A
B C
D E
Figure 2 The illustration trajectory of dynamic soaring
L
X
Y
Z
v
D
F
120575 1205751
F1mg
F9984001
mGWz
Figure 3 The applied forces for the UAV
the force is the same as the wind direction The inertial forcecan be expressed as [10 15 16]
119865119894= minus119898
119889119882
119889119905
997888119894 = minus119898
119889119882
119889119911sdot119889119911
119889119905
997888119894 = minus119898119866
119882V119911
997888119894 (3)
where 119894 is the unit vector of wind field and V119911is the airspeed
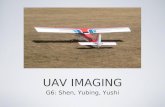
component in the direction of positive 119911-axis So a pointmass flight model with attached forces is adopted and thedefinitions of forces speed and angles used in the modelare shown in Figure 3 The UAV is represented by a three-dimensional point-mass model with 3 DOF From Figure 3119865 is the resultant force of lift (119871) and drag (119863) 120575 is the anglebetween 119865 and119863 119865
1is the resultant force of gravity (119898119892) and
inertial force (119898119866119882V119911) and 1198651015840
1is the reverse force of 119865
1 The
wind blows in the direction of position119883The barycenter kinetics equation of aircraft in the nonin-
ertial frame is represented as
119898V =
997888119871 +
997888119863 + 119898
997888119892 minus 119898119866
119882V119911
997888119894 (4)
where V is the acceleration vector of airspeed 997888119871 is the vectorof lift 997888119863 is the vector of drag and119898997888119892 is the vector of gravityThe last expression in (4) is the inertial force
Using the standard formulations for lift and drag force
119871 =1
2120588119878119862119871V2 (5)
119863 =1
2120588119878119862119863V2 (6)
119862119863= 1198621198630+ 1198701198622
119871 (7)
where 120588 is air density 119878 is wing area 119862119871is lift coefficient
119862119863is drag coefficient V is the airspeed of the aircraft 119862
1198630
is the parasitic drag coefficient and 1198701198622119871is the induced drag
coefficient Note that
119870 = (4(119871
119863)2
max1198621198630)
minus1
(8)
where (119871119863)max is the maximum lift over drag ratio whichtogether with 119862
1198630 is the most important aircraft aerody-
namic efficiency parameters and fully defines the aerody-namic drag polar
In the course of flight the direction of lift is crosscut todrag all the time so the resultant force (119865) of lift and drag canbe indicated as
|119865| = radic1198712 + 1198632 =1
2V2120588119878radic1198622
119871+ 1198622119863 (9)
From (9) the airspeed (V) of the aircraft is
|V| = radic2 |119865|
120588119878radic1198622119871+ 1198622119863
(10)
When the value of 119865 is equal to 11986510158401 the relationship
between V and V119911can be attained by (10)
As for the energy variation first of all considering thetheorem of kinetic energy in the noninertial frame
119889119864119896= minus119875119863 |V|2119889119897 + 119898119866
119882V119911119889119909 minus 119898119892119889119911 (11)
where 119889119864119896is the variation of kinetic energy 119889119897 is the identity
element of flight trajectory and 119875119863= 12120588119878119862
119863 The right-
hand side of (11) is infinitesimal energy expressions caused bydrag force inertial force and gravitational forceThe lift force(119871) is vertical to the direction of motion so there is no kineticenergy variation of UAV caused by lift force
If 119889119897 = V119889119905 119889119909 = V119909119889119905 and V
119909is the airspeed component
in the direction of positive 119909 (11) then transforms into
119889119864119896= (minus119875
119863 |V|3+ 119898119866
119882V119911V119909) 119889119905 minus 119898119892119889119911 (12)
The integration of (12) can be expressed as
119864119896119891minus 1198641198960= int
V(119905)(minus119875119863 |V|3+ 119898119866
119882V119911V119909) 119889119905
minus 119898119892 (119911119891minus 1199110)
(13)
where 119864119896119891
is the kinetic energy at height of 119911119891and 119864
1198960is the
kinetic energy at height of 1199110 After the aircraft fly a period of
time if the kinetic energy of aircraft keeps in a constant valuethe energy variation of this process could be indicated by thechange of altitude difference and (13) can now be stated to be
Δ119911 =1
119898119892intV(119905)(minus119875119863 |V|3+ 119898119866
119882V119911V119909) 119889119905 (14)
Δ119911 is the variation of flight height From (14) it can befound that the drag (119863) and inertial force (119865
119894) bring about
4 International Journal of Aerospace Engineering
the variation of altitude or the variation of potential energyThat is to say as long as there was wind gradient (119866
119882) in the
wind field the aircraft could extract energy from the windfield in the suitable V
119909and V
119911 In (14) the drag (119863) makes
negative work all the time but inertial force (119865119894) does positive
or negative work to the aircraft depending on the specificcases If 119866
119882gt 0 and V
119911V119909gt 0 in this case inertial force (119865
119894)
does positive work to the aircraft For the wind field 119866119882gt 0
the following relation must hold
V119909gt 0
V119911gt 0
or V119909lt 0
V119911lt 0
(15)
That is the aircraft climbs in the positive direction of 119909-119911or dives in the negative direction of 119909-119911 the aircraft extractsenergy If the maneuver is reversed the aircraft loses energyThe mechanical energy of the aircraft is denoted as 119864
119898 The
variation of mechanical energy is equal to the energy causedby drag and inertial forceThe identity element of mechanicalenergy can be expressed as
119889119864119898= 119863 sdot 119889119897 + 119898119866
119908V119911119889119909
= minus119875119863 V2sdot 119889119897 + 119898 sdot 119866
119882sdot V119911sdot 119889119909
= 119898(119875119863 V3sdot 119889119905 + 119866
119882sdot V119911sdot119889119909
119889119905sdot 119889119905)
= 119898 sdot 119889119905 (minus119875119863
119898V3 + 119866119882 sdot V119911 sdot V119909)
(16)
So the unit mass power of mechanical energy is
1
119898
119889119864119898
119889119905= minus
119875119863
119898V3 + 119866119882 sdot V119911 (119905) sdot V119909 (119905) (17)
where v is the airspeed Actually (17) and (14) mean the samethings
23 The Balance Points of Dynamic Soaring In the point ofbalance the composition of driving force vectors is zero andthe resultant force of aircraft is zero The dynamical equationin noninertial system can be expressed as
997888119871 +
997888119863 + 119898
997888119892 + 119898119866
119908V119911
997888119894 =
9978880 (18)
Because the ground speed of the aircraft remains constantin the balance point that is to say the kinetic energy of theflight system remains constant When V
119911gt 0 the potential
energy of the flight system increases with increase in flightaltitude and the mechanical energy increases at the sametime On the other hand when V
119911lt 0 the mechanical energy
of the aircraft would not always increase in which case somestudies need to be done in the future Here the balance pointis called lifting balance point when V
119911gt 0 while when V
119911lt 0
the balance point is called descending balance point When
V119911= 0 there is no balance point because there is no inertial
force to compensate the dragAlternatively (18) can be expressed in another way
radic1198712 + 1198632 = radic11989821198922 + 11989821198662119882V2119911 (19)
Combining (5)-(6) (10) and (19) there is
V4 =11989821198922+ 11989821198662
119882V2119911
1205782119886
(20)
where
1205782
119886=1
4(120588211987821198622
119871+ 120588211987821198622
119863) (21)
Equation (20) describes the relationship between V and V119911
in the balance point Simultaneously (20) ensured that thesize of aerodynamic force is equal to the resultant force ofgravitation and inertial force
Then the only restriction to airspeed is the bank angle ofair velocity vector which is defined as 120595 There is a uniquebank angle to enable forces to be balanced it is necessary tofigure out that the bank angle whichmade the included anglebetween air velocity vector (V) and 119865
1 is 1205751 where 119865
1is the
resultant force of gravity (119898119892) and inertial force (119898119866119882V119911) In
Figure 3 the included angle between airspeed vector (V) and1198651can be repressed as
cos 1205751=
9978881198651sdot997888V
100381610038161003816100381611986511003816100381610038161003816 sdot |V|
(22)
When 120575 = 1205751 in this case the aerodynamic force appears
to get across the inverse direction of the resultant force ofgravitation and inertial force Hence
cos 1205751=
9978881198651sdot997888V
100381610038161003816100381611986511003816100381610038161003816 sdot |V|
= cos 120575 = 119863
radic1198712 + 1198632 (23)
With the geometrical relationship of forces balanced onecan acquire the space curve of V
119909times V119910times V119911 which is obtained
by projecting the four-dimensional space V119909times V119910times V119911times120595 into
three-dimensional space The fundamental is to find out asuitable aerodynamic force to compensate the resultant forceof gravitation and inertial force
The resultant force of gravitation and inertial force997888119865 = [119898119866
119882V119911 0 minus119898119892] air velocity vector 997888V = [V
119903cos(120595)
V119903sin(120595) V
119911] and V
119903= radicV2 minus V2
119911 combining (20) and (23)
there is
119898
120578119886
119866119882V119911radicradic
11989821198922 + 11989821198662119882V2119911
1205782119886
minus V2119911cos120595 minus 119898
120578119886
V119911119892
= (11989821198662119882V2119911+ 11989821198922
1205782119886
)
34
cos 120575
(24)
International Journal of Aerospace Engineering 5
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
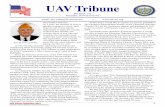
Figure 4 The extent of V119911 three typical values of 119866
119882 119862119871are selected which can tell the relationship between albatrossrsquo V
119911 119866119882 and 119862
119871
Let
119896 =119898
120578119886
=119898
119878sdot
2
120588radic1198622119871+ 1198622119863
(25)
where119898119878 is the wing loadingFrom (24) and (25)
cos 120575 = 119891 (V119911)
=
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(26)
which is subjected to the constraint
V4119911minus 11989621198662
119882V2119911minus 11989621198922le 0 (27)
Obviously there are two roots for (27) a positive root and anegative root Moreover the value of positive root is greaterthan the absolute value of negative root Thus there is
minusradic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2le V119911
leradic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(28)
which is one of constraint conditions for the solution of (26)
3 Simulation Results and Discussions
Because there is no closed form solution for the balancepoints in dynamic soaring numerical investigations arecarried out instead As dynamic soaring flight is directly
Table 1 Albatross and UAV demonstrator parameter values used
Parameter Albatross UAV demonstratorMass [kg] 85 55Wing area 119878 [m2] 065 068088Aspect ratio 1681 1681Span [m] 3306 261120588 [kgm3] 122 1221198621198630
0033 0033119864max 20 21
inspired by albatross wandering albatrossrsquo parameters usedby Sachs [4] are assumed Based on the architecture of awandering albatross an aircraft demonstrator model is usedas a reference The UAV demonstrator has similarities indimension as well as the performances with albatross Thiswill ensure that the performances of the aircraft model areachievable by an engineering-designed vehicle The param-eter values of albatross and UAV demonstrator are givenin Table 1 where 119864max is the maximum lift-to-drag ratioCompared with the albatross the UAV demonstrator hasa lighter mass Furthermore the flying ability close to theground surface of the UAV demonstrator is limited whilealbatross can fly with a wing tip touching the water Forthe reason of security the UAV demonstrator has a smallerwingspan The aerofoil of UAV demonstrator is E214 whichmakes the vehicle have a better performance than albatrossreaching a maximum lift-to-drag ratio of 21
From (26) it can be found that the relationship betweenvariables cos(120575) and cos(120595) is linear and the value of cos(120595)is located in the interval [minus1 1] so the range of cos(120575) can bedefined The extent of albatrossrsquo V
119911and UAV demonstratorrsquos
V119911is shown in Figures 4 and 5 respectivelyIn Figures 4 and 5 the black horizontal dotted line
represents cos(120575) The solid curve represents the variation of
6 International Journal of Aerospace Engineering
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
Figure 5 The extent of UAV demonstratorrsquos V119911 three typical values of 119866
119882 119862119871are selected
minus119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892radic119896(1198922 + 1198662
119882V2119911)34
The dotted curve represents119866119882sdotV119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus
V119911119892radic119896(1198922 +1198662
119882V2119911)34 From Figures 4 and 5 it can be found
that no matter what set of parameters (119866119882 119862119871) are selected
there always exists a balance point in the course of dynamicsoaring In the range of V
119911lt 0 the maximum value of the
solid line is greater than one and solid line and dotted line gothrough the original point That is cos(120575) has correspondingvalue in the area of V
119911lt 0 Furthermore in the area of V
119911gt 0
the right-hand limit of (28) includes values which are greaterthan zero then the expression of right-hand limit should bein the phase of lifting at zero point and the derived functionof right-hand limit should be greater than zero at zero pointthat is
1198911015840(V119911)V119911=0=119866119882radic119896119892 minus 119892
1198961198923gt 0 (29)
Hence
119866119882gt radic
119892
119896 (30)
In (30) there is not enough evidence to say that thereexists balance point in the area of V
119911gt 0 From Figures 4 and
5 it can be found that the maximum value of the right-handlimit of (26) cannot be less than cos(120575) that is
max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
minus cos 120575 gt 0
(31)
Equation (31) then is converted to
max0leV119911leV119911max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(32)
where
V119911max =
radic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(33)
In order to obtain the maximum value of (32) another func-tion 119891 is created
119891 =
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(34)
The contour line figure of albatrossrsquo max119891 and V119911 max is
expressed in Figures 6 and 7The contour line figure of UAV demonstratorrsquos max119891 and
V119911 max is expressed in Figures 8 and 9
From Figure 6 it is obvious that max119891 has many valuesgreater than zeroThat is to say (31) has reasonable solutionsFrom Figure 7 the maximum value of V
119911for the albatrossrsquo
lifting balance allowance in dynamic soaring can be foundFor example if the lift coefficient of albatross (119862
119871 albatross) is 1and the gradient of the wind field (119866
119882) is 1 in Figure 6 the
value of max119891 is 04 Compared with Figure 7 V119911= 9ms
combining with (20) it can be found that V = 170ms Thatis to say when albatrossrsquo airspeed reaches 170ms there existsequilibrium point in this wind field Just getting the value ofairspeed is not enough to make conclusions The restrictionto airspeed is the bank angle of air velocity vector whichis defined as 120595 With the geometrical relationship of forces
International Journal of Aerospace Engineering 7
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
0708
0809
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 6 The contour line of (albatross) max119891
0
0
1
1
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
21
21
22
22
23
23
24
24
25
25
26
26
27
27
28
28
29
29
30
30
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 7 The contour line of (albatross) V119911 max
balanced one can acquire the space curve of V119909times V119910times V119911
which is obtained by projecting the four-dimensional spaceV119909timesV119910timesV119911times120595 into three-dimensional spaceThe fundamental
is to find out a suitable aerodynamic force to compensatethe resultant force of gravitation and inertial force From(24) (25) and (26) the value range of the bank angle is[30∘ 60∘]The albatross can reach the equilibrium position ingradient wind under these limiting conditions Similarly theequilibriumpoints forUAVdemonstrator in dynamic soaringcan be found in Figures 8 and 9
4 Conclusions
Dynamic soaring gives the albatross an ability to achieveenergy from the environment and prolong its flight endur-ance which is a guide to consider using dynamic soaring as apropulsive energy source for small UAVsThe paper presentsan equilibrium position theory of dynamic soaring whichis the forces balance during the flight At the equilibriumposition the aircraft stays in a certain speed without kineticenergy lossWhen the flight direction is upward themechan-ical energy would increase which can store energy for flight
In this paper the wind relative reference frame of aircraftis noninertial and the inertial force 119865 created by wind canbe used to do work for aircraft In the noninertial frame
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
07
08
08
09
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 8 The contour line of (UAV demonstrator) max119891
0
0
1
1
2
2
3
3
3
4
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
1717
1818
1919
2020
2121
2222
2323
2424
2525
2626
2727
2828
2929
3030
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 9 The contour line of (UAV demonstrator) V119911 max
the mechanical energy variation of the aircraft equals theenergy caused by drag and inertial force When the windgradient 119866
119882gt 0 and V
119911V119909gt 0 (V
119909 V119911are the airspeed
component in the direction of positive 119909-axis and 119911-axis)the inertial force (119865) does positive work to the aircraft Themechanical energy variation for unit mass is influenced bywind gradient mass (119898) and drag coefficient
Because of the existence of the gradient wind field thereare some balance points during dynamic soaring no matterhow parameters are chosen In the contour line figures ofalbatrossrsquo max119891 and V
119911 max it is easy to find out that themax-imum value of V
119911 albatross lift coefficient (119862119871 albatross) airspeed
(V) and bank angle (120595) and the gradient of the wind field arerequired by the dynamic soaring balance points By meansof performances comparison between UAV demonstratorand albatross it is manageable to apply dynamic soaring inengineering practice
Finally in order to make dynamic soaring profit fromfurther research work as soon as possible dynamic soaringexperiments are necessary Furthermore an investigationwith theory of balances for 6 DOF aircraft model would behelpful for instructing the dynamic soaring experiments
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
8 International Journal of Aerospace Engineering
Acknowledgment
The authors gratefully acknowledge the financial supportfrom the Fundamental Research Funds for the CentralUniversities (Project no CDJZR14325501)
References
[1] D Weatherington and U Deputy Unmanned Aircraft SystemsRoadmap 2005ndash2030 Deputy UAV Planning Task ForceOUSD (ATampL) 2005
[2] Y J Zhao and Y C Qi ldquoMinimum fuel powered dynamicsoaring of unmanned aerial vehicles utilizing wind gradientsrdquoOptimal Control Applications and Methods vol 25 no 5 pp211ndash233 2004
[3] P L Richardson ldquoHow do albatrosses fly around the worldwithout flapping their wingsrdquo Progress in Oceanography vol88 no 1ndash4 pp 46ndash58 2011
[4] G Sachs ldquoMinimum shear wind strength required for dynamicsoaring of albatrossesrdquo Ibis vol 147 no 1 pp 1ndash10 2005
[5] G C Bower Boundary layer dynamic soaring for autonomousaircraft design and validation [PhD thesis] Stanford Univer-sity Stanford Calif USA 2011
[6] J W S Rayleigh ldquoThe soaring of birdsrdquo Nature vol 27 no 701pp 534ndash535 1883
[7] N R J Lawrance and S Sukkarieh ldquoAutonomous exploration ofawind fieldwith a gliding aircraftrdquo Journal of Guidance Controland Dynamics vol 34 no 3 pp 719ndash733 2011
[8] N R J Lawrance Autonomous soaring flight for unmannedaerial vehicles [PhD thesis] University of Sydney SydneyAustralia 2011
[9] J LGrenestedtOnDynamic SoaringMAEDepartmental Sem-inars Princeton University Press Princeton NJ USA 2010
[10] MDeittert C A Toomer A Richards andA Pipe ldquoEnginelessunmanned aerial vehicle propulsion by dynamic soaringrdquoJournal of Guidance Control and Dynamics vol 32 no 5 pp1446ndash1457 2009
[11] J C D Cone A Mathematical Analysis of the Dynamic SoaringFlight of the Albatross with Ecological Interpretations VirginiaInstitute of Marine Science Gloucester Point Va USA 1964
[12] L Peter ldquoWind energy extraction by birds and flight vehiclesrdquoin Proceedings of the 43rd AIAA Aerospace Sciences Meeting andExhibit American Institute of Aeronautics and AstronauticsReno Nev USA January 2005
[13] P P Sukumar and M S Selig ldquoDynamic soaring of sailplanesover open fieldsrdquo Journal of Aircraft vol 50 no 5 pp 1420ndash1430 2013
[14] B Ricardo G Anouck A Mariam and S Joao ldquoShear windestimationrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference American Institute of Aeronautics andAstronautics Portland Ore USA August 2011
[15] J V Jose and E J Saletan Classical Dynamics A ContemporaryApproach Cambridge University Press Cambridge UK 1998
[16] Y J Zhao ldquoOptimal patterns of glider dynamic soaringrdquo Opti-mal Control Applications and Methods vol 25 no 2 pp 67ndash892004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Aerospace Engineering
of minimal and maximal permissible wind strengths Cone[11] analyzed the dynamic soaring flight of albatross withmathematical models Peter [12] draw a conclusion that in anenergy neutral cycle of dynamic soaring whether the vehiclereturns to initial velocity and height with no power inputdepends only upon the maximum lift-to-drag ratio of thevehicle and the wind speed variation
Scores of research findings reveal the significant meaningof dynamic soaring Based on the achievements of thesefindings some new ideas are studied in this paper Theauthors first extend the idea of Grenestedt [9] by investigatingthe equilibrium position of dynamic soaring and providinginsight into energy variation in equilibrium position Thesame as other flight styles they applied forces on the aircraftfor dynamic soaring varying continuouslyThen there shouldbe some positions of forces balance in the course of flightAt these points the aircraft stays in a certain speed with nokinetic energy loss Of course if all the points could chain aclosed route the permanent flying would come true when theaircraft flies along the route
The rest of the paper is organized as follows the method-ology is described in Section 2 including the wind gradientand the mathematical models for the UAV Section 3 issimulation results and associated discussion Finally theconcluding remarks are made in Section 4
2 Mathematical Formulations of the Problem
Inspired by the forces analysis methods in dynamic soaringsuggested by Bower [5] and Deittert et al [10] the problemof equilibrium position for dynamic soaring is analyzedintensively in this paper The parameters that can influencethe equilibrium position include the range of airspeed thesize of wind gradient and other parameters Meanwhile themaximum value of energy acquired in the equilibrium pointis analyzed Once the parameters of an aircraft are known thewind gradient suited for the equilibrium position of dynamicsoaring can be determined Similarly in a known wind fieldthe type of aircraft that has equilibrium point in dynamicsoaring can be found out A set of computationalmethods forequilibrium position of dynamic soaring is established Thepurpose of this section is to provide a theoretical guidancefor the optimal dynamic soaring trajectory by means of theanalysis of equilibrium position of dynamic soaring Dueto no kinetic energy loss in the position of forces balancethe mechanical energy increases with increasing value ofpotential energy of the aircraft in the course of upwardflying
21 The Wind Field Model It is assumed that the air-craft flies over a flat surface and the wind field is steadyThere is a horizontal shear flow of the air in the three-dimensional space The flow of the air causes the windspeed to increase with increasing height above the groundThe air density is assumed to be constant The wind blowsalong the negative direction of 119909-axis the positive 119911-axispoints to the sky and the direction of 119910-axis is dependenton right-handed rule The relation between wind speed
0 3 6 9 12 150
20
40
60
80
100
W (ms)
z (m
)
Wind speedWind gradient
Figure 1 Wind speed and wind gradient
119882(119911) and height above the surface 119911 is defined as follows[13 14]
119882(119911) = 119882refln (119911119911
0)
ln (119911ref1199110) (1)
where 119882(119911) is the wind speed at height 119911 and 119882ref is thewind speed at the reference height 119911ref The variable 119911
0is the
aerodynamic roughness length or the roughness factor It isan experimentally derived constant that accounts for the kindof surface over which the wind is blowing Typically a highervalue of the roughness length indicates more obstructionson the surface such as trees and buildings By differentiating(1) with respect to altitude the following equation can beobtained
(119911) =119882ref
ln (119911ref1199110) sdot 119911= 119866119882 (2)
where 119866119882
is the gradient of the wind field The variationtrends of wind profile and wind gradient profile are depictedin Figure 1
Figure 1 shows the wind profile and wind gradient profilefor value of the roughness coefficient with 119882ref = 15ms119911ref = 100m and 119911
0= 005m
22 FlyingModel According to the observed data of dynamicsoaring [4] the albatross climbs with headwind and thewindspeed increases with the increasing of flight height Afterturning in high altitude the albatross glides with leewardand the wind speed decreases with the descending of flightheight An illustration of a typical dynamic soaring trajectoryis shown in Figure 2
Compared with Earth fixed frame the wind relativereference frame of aircraft is not inertial frame in the windfield So there is an inertial force 119865
119894that works on the aircraft
A noninertial frame is defined which is the wind relativereference frame of aircraft In the noninertial frame there arefour applied forces accounted for the aircraft lift force (119871)drag force (119863) gravitational force (119898119892) and inertial force(119865119894) The inertial force is created by wind so the direction of
International Journal of Aerospace Engineering 3
Wx
A
B C
D E
Figure 2 The illustration trajectory of dynamic soaring
L
X
Y
Z
v
D
F
120575 1205751
F1mg
F9984001
mGWz
Figure 3 The applied forces for the UAV
the force is the same as the wind direction The inertial forcecan be expressed as [10 15 16]
119865119894= minus119898
119889119882
119889119905
997888119894 = minus119898
119889119882
119889119911sdot119889119911
119889119905
997888119894 = minus119898119866
119882V119911
997888119894 (3)
where 119894 is the unit vector of wind field and V119911is the airspeed
component in the direction of positive 119911-axis So a pointmass flight model with attached forces is adopted and thedefinitions of forces speed and angles used in the modelare shown in Figure 3 The UAV is represented by a three-dimensional point-mass model with 3 DOF From Figure 3119865 is the resultant force of lift (119871) and drag (119863) 120575 is the anglebetween 119865 and119863 119865
1is the resultant force of gravity (119898119892) and
inertial force (119898119866119882V119911) and 1198651015840
1is the reverse force of 119865
1 The
wind blows in the direction of position119883The barycenter kinetics equation of aircraft in the nonin-
ertial frame is represented as
119898V =
997888119871 +
997888119863 + 119898
997888119892 minus 119898119866
119882V119911
997888119894 (4)
where V is the acceleration vector of airspeed 997888119871 is the vectorof lift 997888119863 is the vector of drag and119898997888119892 is the vector of gravityThe last expression in (4) is the inertial force
Using the standard formulations for lift and drag force
119871 =1
2120588119878119862119871V2 (5)
119863 =1
2120588119878119862119863V2 (6)
119862119863= 1198621198630+ 1198701198622
119871 (7)
where 120588 is air density 119878 is wing area 119862119871is lift coefficient
119862119863is drag coefficient V is the airspeed of the aircraft 119862
1198630
is the parasitic drag coefficient and 1198701198622119871is the induced drag
coefficient Note that
119870 = (4(119871
119863)2
max1198621198630)
minus1
(8)
where (119871119863)max is the maximum lift over drag ratio whichtogether with 119862
1198630 is the most important aircraft aerody-
namic efficiency parameters and fully defines the aerody-namic drag polar
In the course of flight the direction of lift is crosscut todrag all the time so the resultant force (119865) of lift and drag canbe indicated as
|119865| = radic1198712 + 1198632 =1
2V2120588119878radic1198622
119871+ 1198622119863 (9)
From (9) the airspeed (V) of the aircraft is
|V| = radic2 |119865|
120588119878radic1198622119871+ 1198622119863
(10)
When the value of 119865 is equal to 11986510158401 the relationship
between V and V119911can be attained by (10)
As for the energy variation first of all considering thetheorem of kinetic energy in the noninertial frame
119889119864119896= minus119875119863 |V|2119889119897 + 119898119866
119882V119911119889119909 minus 119898119892119889119911 (11)
where 119889119864119896is the variation of kinetic energy 119889119897 is the identity
element of flight trajectory and 119875119863= 12120588119878119862
119863 The right-
hand side of (11) is infinitesimal energy expressions caused bydrag force inertial force and gravitational forceThe lift force(119871) is vertical to the direction of motion so there is no kineticenergy variation of UAV caused by lift force
If 119889119897 = V119889119905 119889119909 = V119909119889119905 and V
119909is the airspeed component
in the direction of positive 119909 (11) then transforms into
119889119864119896= (minus119875
119863 |V|3+ 119898119866
119882V119911V119909) 119889119905 minus 119898119892119889119911 (12)
The integration of (12) can be expressed as
119864119896119891minus 1198641198960= int
V(119905)(minus119875119863 |V|3+ 119898119866
119882V119911V119909) 119889119905
minus 119898119892 (119911119891minus 1199110)
(13)
where 119864119896119891
is the kinetic energy at height of 119911119891and 119864
1198960is the
kinetic energy at height of 1199110 After the aircraft fly a period of
time if the kinetic energy of aircraft keeps in a constant valuethe energy variation of this process could be indicated by thechange of altitude difference and (13) can now be stated to be
Δ119911 =1
119898119892intV(119905)(minus119875119863 |V|3+ 119898119866
119882V119911V119909) 119889119905 (14)
Δ119911 is the variation of flight height From (14) it can befound that the drag (119863) and inertial force (119865
119894) bring about
4 International Journal of Aerospace Engineering
the variation of altitude or the variation of potential energyThat is to say as long as there was wind gradient (119866
119882) in the
wind field the aircraft could extract energy from the windfield in the suitable V
119909and V
119911 In (14) the drag (119863) makes
negative work all the time but inertial force (119865119894) does positive
or negative work to the aircraft depending on the specificcases If 119866
119882gt 0 and V
119911V119909gt 0 in this case inertial force (119865
119894)
does positive work to the aircraft For the wind field 119866119882gt 0
the following relation must hold
V119909gt 0
V119911gt 0
or V119909lt 0
V119911lt 0
(15)
That is the aircraft climbs in the positive direction of 119909-119911or dives in the negative direction of 119909-119911 the aircraft extractsenergy If the maneuver is reversed the aircraft loses energyThe mechanical energy of the aircraft is denoted as 119864
119898 The
variation of mechanical energy is equal to the energy causedby drag and inertial forceThe identity element of mechanicalenergy can be expressed as
119889119864119898= 119863 sdot 119889119897 + 119898119866
119908V119911119889119909
= minus119875119863 V2sdot 119889119897 + 119898 sdot 119866
119882sdot V119911sdot 119889119909
= 119898(119875119863 V3sdot 119889119905 + 119866
119882sdot V119911sdot119889119909
119889119905sdot 119889119905)
= 119898 sdot 119889119905 (minus119875119863
119898V3 + 119866119882 sdot V119911 sdot V119909)
(16)
So the unit mass power of mechanical energy is
1
119898
119889119864119898
119889119905= minus
119875119863
119898V3 + 119866119882 sdot V119911 (119905) sdot V119909 (119905) (17)
where v is the airspeed Actually (17) and (14) mean the samethings
23 The Balance Points of Dynamic Soaring In the point ofbalance the composition of driving force vectors is zero andthe resultant force of aircraft is zero The dynamical equationin noninertial system can be expressed as
997888119871 +
997888119863 + 119898
997888119892 + 119898119866
119908V119911
997888119894 =
9978880 (18)
Because the ground speed of the aircraft remains constantin the balance point that is to say the kinetic energy of theflight system remains constant When V
119911gt 0 the potential
energy of the flight system increases with increase in flightaltitude and the mechanical energy increases at the sametime On the other hand when V
119911lt 0 the mechanical energy
of the aircraft would not always increase in which case somestudies need to be done in the future Here the balance pointis called lifting balance point when V
119911gt 0 while when V
119911lt 0
the balance point is called descending balance point When
V119911= 0 there is no balance point because there is no inertial
force to compensate the dragAlternatively (18) can be expressed in another way
radic1198712 + 1198632 = radic11989821198922 + 11989821198662119882V2119911 (19)
Combining (5)-(6) (10) and (19) there is
V4 =11989821198922+ 11989821198662
119882V2119911
1205782119886
(20)
where
1205782
119886=1
4(120588211987821198622
119871+ 120588211987821198622
119863) (21)
Equation (20) describes the relationship between V and V119911
in the balance point Simultaneously (20) ensured that thesize of aerodynamic force is equal to the resultant force ofgravitation and inertial force
Then the only restriction to airspeed is the bank angle ofair velocity vector which is defined as 120595 There is a uniquebank angle to enable forces to be balanced it is necessary tofigure out that the bank angle whichmade the included anglebetween air velocity vector (V) and 119865
1 is 1205751 where 119865
1is the
resultant force of gravity (119898119892) and inertial force (119898119866119882V119911) In
Figure 3 the included angle between airspeed vector (V) and1198651can be repressed as
cos 1205751=
9978881198651sdot997888V
100381610038161003816100381611986511003816100381610038161003816 sdot |V|
(22)
When 120575 = 1205751 in this case the aerodynamic force appears
to get across the inverse direction of the resultant force ofgravitation and inertial force Hence
cos 1205751=
9978881198651sdot997888V
100381610038161003816100381611986511003816100381610038161003816 sdot |V|
= cos 120575 = 119863
radic1198712 + 1198632 (23)
With the geometrical relationship of forces balanced onecan acquire the space curve of V
119909times V119910times V119911 which is obtained
by projecting the four-dimensional space V119909times V119910times V119911times120595 into
three-dimensional space The fundamental is to find out asuitable aerodynamic force to compensate the resultant forceof gravitation and inertial force
The resultant force of gravitation and inertial force997888119865 = [119898119866
119882V119911 0 minus119898119892] air velocity vector 997888V = [V
119903cos(120595)
V119903sin(120595) V
119911] and V
119903= radicV2 minus V2
119911 combining (20) and (23)
there is
119898
120578119886
119866119882V119911radicradic
11989821198922 + 11989821198662119882V2119911
1205782119886
minus V2119911cos120595 minus 119898
120578119886
V119911119892
= (11989821198662119882V2119911+ 11989821198922
1205782119886
)
34
cos 120575
(24)
International Journal of Aerospace Engineering 5
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
Figure 4 The extent of V119911 three typical values of 119866
119882 119862119871are selected which can tell the relationship between albatrossrsquo V
119911 119866119882 and 119862
119871
Let
119896 =119898
120578119886
=119898
119878sdot
2
120588radic1198622119871+ 1198622119863
(25)
where119898119878 is the wing loadingFrom (24) and (25)
cos 120575 = 119891 (V119911)
=
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(26)
which is subjected to the constraint
V4119911minus 11989621198662
119882V2119911minus 11989621198922le 0 (27)
Obviously there are two roots for (27) a positive root and anegative root Moreover the value of positive root is greaterthan the absolute value of negative root Thus there is
minusradic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2le V119911
leradic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(28)
which is one of constraint conditions for the solution of (26)
3 Simulation Results and Discussions
Because there is no closed form solution for the balancepoints in dynamic soaring numerical investigations arecarried out instead As dynamic soaring flight is directly
Table 1 Albatross and UAV demonstrator parameter values used
Parameter Albatross UAV demonstratorMass [kg] 85 55Wing area 119878 [m2] 065 068088Aspect ratio 1681 1681Span [m] 3306 261120588 [kgm3] 122 1221198621198630
0033 0033119864max 20 21
inspired by albatross wandering albatrossrsquo parameters usedby Sachs [4] are assumed Based on the architecture of awandering albatross an aircraft demonstrator model is usedas a reference The UAV demonstrator has similarities indimension as well as the performances with albatross Thiswill ensure that the performances of the aircraft model areachievable by an engineering-designed vehicle The param-eter values of albatross and UAV demonstrator are givenin Table 1 where 119864max is the maximum lift-to-drag ratioCompared with the albatross the UAV demonstrator hasa lighter mass Furthermore the flying ability close to theground surface of the UAV demonstrator is limited whilealbatross can fly with a wing tip touching the water Forthe reason of security the UAV demonstrator has a smallerwingspan The aerofoil of UAV demonstrator is E214 whichmakes the vehicle have a better performance than albatrossreaching a maximum lift-to-drag ratio of 21
From (26) it can be found that the relationship betweenvariables cos(120575) and cos(120595) is linear and the value of cos(120595)is located in the interval [minus1 1] so the range of cos(120575) can bedefined The extent of albatrossrsquo V
119911and UAV demonstratorrsquos
V119911is shown in Figures 4 and 5 respectivelyIn Figures 4 and 5 the black horizontal dotted line
represents cos(120575) The solid curve represents the variation of
6 International Journal of Aerospace Engineering
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
Figure 5 The extent of UAV demonstratorrsquos V119911 three typical values of 119866
119882 119862119871are selected
minus119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892radic119896(1198922 + 1198662
119882V2119911)34
The dotted curve represents119866119882sdotV119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus
V119911119892radic119896(1198922 +1198662
119882V2119911)34 From Figures 4 and 5 it can be found
that no matter what set of parameters (119866119882 119862119871) are selected
there always exists a balance point in the course of dynamicsoaring In the range of V
119911lt 0 the maximum value of the
solid line is greater than one and solid line and dotted line gothrough the original point That is cos(120575) has correspondingvalue in the area of V
119911lt 0 Furthermore in the area of V
119911gt 0
the right-hand limit of (28) includes values which are greaterthan zero then the expression of right-hand limit should bein the phase of lifting at zero point and the derived functionof right-hand limit should be greater than zero at zero pointthat is
1198911015840(V119911)V119911=0=119866119882radic119896119892 minus 119892
1198961198923gt 0 (29)
Hence
119866119882gt radic
119892
119896 (30)
In (30) there is not enough evidence to say that thereexists balance point in the area of V
119911gt 0 From Figures 4 and
5 it can be found that the maximum value of the right-handlimit of (26) cannot be less than cos(120575) that is
max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
minus cos 120575 gt 0
(31)
Equation (31) then is converted to
max0leV119911leV119911max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(32)
where
V119911max =
radic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(33)
In order to obtain the maximum value of (32) another func-tion 119891 is created
119891 =
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(34)
The contour line figure of albatrossrsquo max119891 and V119911 max is
expressed in Figures 6 and 7The contour line figure of UAV demonstratorrsquos max119891 and
V119911 max is expressed in Figures 8 and 9
From Figure 6 it is obvious that max119891 has many valuesgreater than zeroThat is to say (31) has reasonable solutionsFrom Figure 7 the maximum value of V
119911for the albatrossrsquo
lifting balance allowance in dynamic soaring can be foundFor example if the lift coefficient of albatross (119862
119871 albatross) is 1and the gradient of the wind field (119866
119882) is 1 in Figure 6 the
value of max119891 is 04 Compared with Figure 7 V119911= 9ms
combining with (20) it can be found that V = 170ms Thatis to say when albatrossrsquo airspeed reaches 170ms there existsequilibrium point in this wind field Just getting the value ofairspeed is not enough to make conclusions The restrictionto airspeed is the bank angle of air velocity vector whichis defined as 120595 With the geometrical relationship of forces
International Journal of Aerospace Engineering 7
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
0708
0809
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 6 The contour line of (albatross) max119891
0
0
1
1
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
21
21
22
22
23
23
24
24
25
25
26
26
27
27
28
28
29
29
30
30
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 7 The contour line of (albatross) V119911 max
balanced one can acquire the space curve of V119909times V119910times V119911
which is obtained by projecting the four-dimensional spaceV119909timesV119910timesV119911times120595 into three-dimensional spaceThe fundamental
is to find out a suitable aerodynamic force to compensatethe resultant force of gravitation and inertial force From(24) (25) and (26) the value range of the bank angle is[30∘ 60∘]The albatross can reach the equilibrium position ingradient wind under these limiting conditions Similarly theequilibriumpoints forUAVdemonstrator in dynamic soaringcan be found in Figures 8 and 9
4 Conclusions
Dynamic soaring gives the albatross an ability to achieveenergy from the environment and prolong its flight endur-ance which is a guide to consider using dynamic soaring as apropulsive energy source for small UAVsThe paper presentsan equilibrium position theory of dynamic soaring whichis the forces balance during the flight At the equilibriumposition the aircraft stays in a certain speed without kineticenergy lossWhen the flight direction is upward themechan-ical energy would increase which can store energy for flight
In this paper the wind relative reference frame of aircraftis noninertial and the inertial force 119865 created by wind canbe used to do work for aircraft In the noninertial frame
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
07
08
08
09
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 8 The contour line of (UAV demonstrator) max119891
0
0
1
1
2
2
3
3
3
4
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
1717
1818
1919
2020
2121
2222
2323
2424
2525
2626
2727
2828
2929
3030
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 9 The contour line of (UAV demonstrator) V119911 max
the mechanical energy variation of the aircraft equals theenergy caused by drag and inertial force When the windgradient 119866
119882gt 0 and V
119911V119909gt 0 (V
119909 V119911are the airspeed
component in the direction of positive 119909-axis and 119911-axis)the inertial force (119865) does positive work to the aircraft Themechanical energy variation for unit mass is influenced bywind gradient mass (119898) and drag coefficient
Because of the existence of the gradient wind field thereare some balance points during dynamic soaring no matterhow parameters are chosen In the contour line figures ofalbatrossrsquo max119891 and V
119911 max it is easy to find out that themax-imum value of V
119911 albatross lift coefficient (119862119871 albatross) airspeed
(V) and bank angle (120595) and the gradient of the wind field arerequired by the dynamic soaring balance points By meansof performances comparison between UAV demonstratorand albatross it is manageable to apply dynamic soaring inengineering practice
Finally in order to make dynamic soaring profit fromfurther research work as soon as possible dynamic soaringexperiments are necessary Furthermore an investigationwith theory of balances for 6 DOF aircraft model would behelpful for instructing the dynamic soaring experiments
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
8 International Journal of Aerospace Engineering
Acknowledgment
The authors gratefully acknowledge the financial supportfrom the Fundamental Research Funds for the CentralUniversities (Project no CDJZR14325501)
References
[1] D Weatherington and U Deputy Unmanned Aircraft SystemsRoadmap 2005ndash2030 Deputy UAV Planning Task ForceOUSD (ATampL) 2005
[2] Y J Zhao and Y C Qi ldquoMinimum fuel powered dynamicsoaring of unmanned aerial vehicles utilizing wind gradientsrdquoOptimal Control Applications and Methods vol 25 no 5 pp211ndash233 2004
[3] P L Richardson ldquoHow do albatrosses fly around the worldwithout flapping their wingsrdquo Progress in Oceanography vol88 no 1ndash4 pp 46ndash58 2011
[4] G Sachs ldquoMinimum shear wind strength required for dynamicsoaring of albatrossesrdquo Ibis vol 147 no 1 pp 1ndash10 2005
[5] G C Bower Boundary layer dynamic soaring for autonomousaircraft design and validation [PhD thesis] Stanford Univer-sity Stanford Calif USA 2011
[6] J W S Rayleigh ldquoThe soaring of birdsrdquo Nature vol 27 no 701pp 534ndash535 1883
[7] N R J Lawrance and S Sukkarieh ldquoAutonomous exploration ofawind fieldwith a gliding aircraftrdquo Journal of Guidance Controland Dynamics vol 34 no 3 pp 719ndash733 2011
[8] N R J Lawrance Autonomous soaring flight for unmannedaerial vehicles [PhD thesis] University of Sydney SydneyAustralia 2011
[9] J LGrenestedtOnDynamic SoaringMAEDepartmental Sem-inars Princeton University Press Princeton NJ USA 2010
[10] MDeittert C A Toomer A Richards andA Pipe ldquoEnginelessunmanned aerial vehicle propulsion by dynamic soaringrdquoJournal of Guidance Control and Dynamics vol 32 no 5 pp1446ndash1457 2009
[11] J C D Cone A Mathematical Analysis of the Dynamic SoaringFlight of the Albatross with Ecological Interpretations VirginiaInstitute of Marine Science Gloucester Point Va USA 1964
[12] L Peter ldquoWind energy extraction by birds and flight vehiclesrdquoin Proceedings of the 43rd AIAA Aerospace Sciences Meeting andExhibit American Institute of Aeronautics and AstronauticsReno Nev USA January 2005
[13] P P Sukumar and M S Selig ldquoDynamic soaring of sailplanesover open fieldsrdquo Journal of Aircraft vol 50 no 5 pp 1420ndash1430 2013
[14] B Ricardo G Anouck A Mariam and S Joao ldquoShear windestimationrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference American Institute of Aeronautics andAstronautics Portland Ore USA August 2011
[15] J V Jose and E J Saletan Classical Dynamics A ContemporaryApproach Cambridge University Press Cambridge UK 1998
[16] Y J Zhao ldquoOptimal patterns of glider dynamic soaringrdquo Opti-mal Control Applications and Methods vol 25 no 2 pp 67ndash892004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 3
Wx
A
B C
D E
Figure 2 The illustration trajectory of dynamic soaring
L
X
Y
Z
v
D
F
120575 1205751
F1mg
F9984001
mGWz
Figure 3 The applied forces for the UAV
the force is the same as the wind direction The inertial forcecan be expressed as [10 15 16]
119865119894= minus119898
119889119882
119889119905
997888119894 = minus119898
119889119882
119889119911sdot119889119911
119889119905
997888119894 = minus119898119866
119882V119911
997888119894 (3)
where 119894 is the unit vector of wind field and V119911is the airspeed
component in the direction of positive 119911-axis So a pointmass flight model with attached forces is adopted and thedefinitions of forces speed and angles used in the modelare shown in Figure 3 The UAV is represented by a three-dimensional point-mass model with 3 DOF From Figure 3119865 is the resultant force of lift (119871) and drag (119863) 120575 is the anglebetween 119865 and119863 119865
1is the resultant force of gravity (119898119892) and
inertial force (119898119866119882V119911) and 1198651015840
1is the reverse force of 119865
1 The
wind blows in the direction of position119883The barycenter kinetics equation of aircraft in the nonin-
ertial frame is represented as
119898V =
997888119871 +
997888119863 + 119898
997888119892 minus 119898119866
119882V119911
997888119894 (4)
where V is the acceleration vector of airspeed 997888119871 is the vectorof lift 997888119863 is the vector of drag and119898997888119892 is the vector of gravityThe last expression in (4) is the inertial force
Using the standard formulations for lift and drag force
119871 =1
2120588119878119862119871V2 (5)
119863 =1
2120588119878119862119863V2 (6)
119862119863= 1198621198630+ 1198701198622
119871 (7)
where 120588 is air density 119878 is wing area 119862119871is lift coefficient
119862119863is drag coefficient V is the airspeed of the aircraft 119862
1198630
is the parasitic drag coefficient and 1198701198622119871is the induced drag
coefficient Note that
119870 = (4(119871
119863)2
max1198621198630)
minus1
(8)
where (119871119863)max is the maximum lift over drag ratio whichtogether with 119862
1198630 is the most important aircraft aerody-
namic efficiency parameters and fully defines the aerody-namic drag polar
In the course of flight the direction of lift is crosscut todrag all the time so the resultant force (119865) of lift and drag canbe indicated as
|119865| = radic1198712 + 1198632 =1
2V2120588119878radic1198622
119871+ 1198622119863 (9)
From (9) the airspeed (V) of the aircraft is
|V| = radic2 |119865|
120588119878radic1198622119871+ 1198622119863
(10)
When the value of 119865 is equal to 11986510158401 the relationship
between V and V119911can be attained by (10)
As for the energy variation first of all considering thetheorem of kinetic energy in the noninertial frame
119889119864119896= minus119875119863 |V|2119889119897 + 119898119866
119882V119911119889119909 minus 119898119892119889119911 (11)
where 119889119864119896is the variation of kinetic energy 119889119897 is the identity
element of flight trajectory and 119875119863= 12120588119878119862
119863 The right-
hand side of (11) is infinitesimal energy expressions caused bydrag force inertial force and gravitational forceThe lift force(119871) is vertical to the direction of motion so there is no kineticenergy variation of UAV caused by lift force
If 119889119897 = V119889119905 119889119909 = V119909119889119905 and V
119909is the airspeed component
in the direction of positive 119909 (11) then transforms into
119889119864119896= (minus119875
119863 |V|3+ 119898119866
119882V119911V119909) 119889119905 minus 119898119892119889119911 (12)
The integration of (12) can be expressed as
119864119896119891minus 1198641198960= int
V(119905)(minus119875119863 |V|3+ 119898119866
119882V119911V119909) 119889119905
minus 119898119892 (119911119891minus 1199110)
(13)
where 119864119896119891
is the kinetic energy at height of 119911119891and 119864
1198960is the
kinetic energy at height of 1199110 After the aircraft fly a period of
time if the kinetic energy of aircraft keeps in a constant valuethe energy variation of this process could be indicated by thechange of altitude difference and (13) can now be stated to be
Δ119911 =1
119898119892intV(119905)(minus119875119863 |V|3+ 119898119866
119882V119911V119909) 119889119905 (14)
Δ119911 is the variation of flight height From (14) it can befound that the drag (119863) and inertial force (119865
119894) bring about
4 International Journal of Aerospace Engineering
the variation of altitude or the variation of potential energyThat is to say as long as there was wind gradient (119866
119882) in the
wind field the aircraft could extract energy from the windfield in the suitable V
119909and V
119911 In (14) the drag (119863) makes
negative work all the time but inertial force (119865119894) does positive
or negative work to the aircraft depending on the specificcases If 119866
119882gt 0 and V
119911V119909gt 0 in this case inertial force (119865
119894)
does positive work to the aircraft For the wind field 119866119882gt 0
the following relation must hold
V119909gt 0
V119911gt 0
or V119909lt 0
V119911lt 0
(15)
That is the aircraft climbs in the positive direction of 119909-119911or dives in the negative direction of 119909-119911 the aircraft extractsenergy If the maneuver is reversed the aircraft loses energyThe mechanical energy of the aircraft is denoted as 119864
119898 The
variation of mechanical energy is equal to the energy causedby drag and inertial forceThe identity element of mechanicalenergy can be expressed as
119889119864119898= 119863 sdot 119889119897 + 119898119866
119908V119911119889119909
= minus119875119863 V2sdot 119889119897 + 119898 sdot 119866
119882sdot V119911sdot 119889119909
= 119898(119875119863 V3sdot 119889119905 + 119866
119882sdot V119911sdot119889119909
119889119905sdot 119889119905)
= 119898 sdot 119889119905 (minus119875119863
119898V3 + 119866119882 sdot V119911 sdot V119909)
(16)
So the unit mass power of mechanical energy is
1
119898
119889119864119898
119889119905= minus
119875119863
119898V3 + 119866119882 sdot V119911 (119905) sdot V119909 (119905) (17)
where v is the airspeed Actually (17) and (14) mean the samethings
23 The Balance Points of Dynamic Soaring In the point ofbalance the composition of driving force vectors is zero andthe resultant force of aircraft is zero The dynamical equationin noninertial system can be expressed as
997888119871 +
997888119863 + 119898
997888119892 + 119898119866
119908V119911
997888119894 =
9978880 (18)
Because the ground speed of the aircraft remains constantin the balance point that is to say the kinetic energy of theflight system remains constant When V
119911gt 0 the potential
energy of the flight system increases with increase in flightaltitude and the mechanical energy increases at the sametime On the other hand when V
119911lt 0 the mechanical energy
of the aircraft would not always increase in which case somestudies need to be done in the future Here the balance pointis called lifting balance point when V
119911gt 0 while when V
119911lt 0
the balance point is called descending balance point When
V119911= 0 there is no balance point because there is no inertial
force to compensate the dragAlternatively (18) can be expressed in another way
radic1198712 + 1198632 = radic11989821198922 + 11989821198662119882V2119911 (19)
Combining (5)-(6) (10) and (19) there is
V4 =11989821198922+ 11989821198662
119882V2119911
1205782119886
(20)
where
1205782
119886=1
4(120588211987821198622
119871+ 120588211987821198622
119863) (21)
Equation (20) describes the relationship between V and V119911
in the balance point Simultaneously (20) ensured that thesize of aerodynamic force is equal to the resultant force ofgravitation and inertial force
Then the only restriction to airspeed is the bank angle ofair velocity vector which is defined as 120595 There is a uniquebank angle to enable forces to be balanced it is necessary tofigure out that the bank angle whichmade the included anglebetween air velocity vector (V) and 119865
1 is 1205751 where 119865
1is the
resultant force of gravity (119898119892) and inertial force (119898119866119882V119911) In
Figure 3 the included angle between airspeed vector (V) and1198651can be repressed as
cos 1205751=
9978881198651sdot997888V
100381610038161003816100381611986511003816100381610038161003816 sdot |V|
(22)
When 120575 = 1205751 in this case the aerodynamic force appears
to get across the inverse direction of the resultant force ofgravitation and inertial force Hence
cos 1205751=
9978881198651sdot997888V
100381610038161003816100381611986511003816100381610038161003816 sdot |V|
= cos 120575 = 119863
radic1198712 + 1198632 (23)
With the geometrical relationship of forces balanced onecan acquire the space curve of V
119909times V119910times V119911 which is obtained
by projecting the four-dimensional space V119909times V119910times V119911times120595 into
three-dimensional space The fundamental is to find out asuitable aerodynamic force to compensate the resultant forceof gravitation and inertial force
The resultant force of gravitation and inertial force997888119865 = [119898119866
119882V119911 0 minus119898119892] air velocity vector 997888V = [V
119903cos(120595)
V119903sin(120595) V
119911] and V
119903= radicV2 minus V2
119911 combining (20) and (23)
there is
119898
120578119886
119866119882V119911radicradic
11989821198922 + 11989821198662119882V2119911
1205782119886
minus V2119911cos120595 minus 119898
120578119886
V119911119892
= (11989821198662119882V2119911+ 11989821198922
1205782119886
)
34
cos 120575
(24)
International Journal of Aerospace Engineering 5
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
Figure 4 The extent of V119911 three typical values of 119866
119882 119862119871are selected which can tell the relationship between albatrossrsquo V
119911 119866119882 and 119862
119871
Let
119896 =119898
120578119886
=119898
119878sdot
2
120588radic1198622119871+ 1198622119863
(25)
where119898119878 is the wing loadingFrom (24) and (25)
cos 120575 = 119891 (V119911)
=
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(26)
which is subjected to the constraint
V4119911minus 11989621198662
119882V2119911minus 11989621198922le 0 (27)
Obviously there are two roots for (27) a positive root and anegative root Moreover the value of positive root is greaterthan the absolute value of negative root Thus there is
minusradic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2le V119911
leradic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(28)
which is one of constraint conditions for the solution of (26)
3 Simulation Results and Discussions
Because there is no closed form solution for the balancepoints in dynamic soaring numerical investigations arecarried out instead As dynamic soaring flight is directly
Table 1 Albatross and UAV demonstrator parameter values used
Parameter Albatross UAV demonstratorMass [kg] 85 55Wing area 119878 [m2] 065 068088Aspect ratio 1681 1681Span [m] 3306 261120588 [kgm3] 122 1221198621198630
0033 0033119864max 20 21
inspired by albatross wandering albatrossrsquo parameters usedby Sachs [4] are assumed Based on the architecture of awandering albatross an aircraft demonstrator model is usedas a reference The UAV demonstrator has similarities indimension as well as the performances with albatross Thiswill ensure that the performances of the aircraft model areachievable by an engineering-designed vehicle The param-eter values of albatross and UAV demonstrator are givenin Table 1 where 119864max is the maximum lift-to-drag ratioCompared with the albatross the UAV demonstrator hasa lighter mass Furthermore the flying ability close to theground surface of the UAV demonstrator is limited whilealbatross can fly with a wing tip touching the water Forthe reason of security the UAV demonstrator has a smallerwingspan The aerofoil of UAV demonstrator is E214 whichmakes the vehicle have a better performance than albatrossreaching a maximum lift-to-drag ratio of 21
From (26) it can be found that the relationship betweenvariables cos(120575) and cos(120595) is linear and the value of cos(120595)is located in the interval [minus1 1] so the range of cos(120575) can bedefined The extent of albatrossrsquo V
119911and UAV demonstratorrsquos
V119911is shown in Figures 4 and 5 respectivelyIn Figures 4 and 5 the black horizontal dotted line
represents cos(120575) The solid curve represents the variation of
6 International Journal of Aerospace Engineering
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
Figure 5 The extent of UAV demonstratorrsquos V119911 three typical values of 119866
119882 119862119871are selected
minus119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892radic119896(1198922 + 1198662
119882V2119911)34
The dotted curve represents119866119882sdotV119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus
V119911119892radic119896(1198922 +1198662
119882V2119911)34 From Figures 4 and 5 it can be found
that no matter what set of parameters (119866119882 119862119871) are selected
there always exists a balance point in the course of dynamicsoaring In the range of V
119911lt 0 the maximum value of the
solid line is greater than one and solid line and dotted line gothrough the original point That is cos(120575) has correspondingvalue in the area of V
119911lt 0 Furthermore in the area of V
119911gt 0
the right-hand limit of (28) includes values which are greaterthan zero then the expression of right-hand limit should bein the phase of lifting at zero point and the derived functionof right-hand limit should be greater than zero at zero pointthat is
1198911015840(V119911)V119911=0=119866119882radic119896119892 minus 119892
1198961198923gt 0 (29)
Hence
119866119882gt radic
119892
119896 (30)
In (30) there is not enough evidence to say that thereexists balance point in the area of V
119911gt 0 From Figures 4 and
5 it can be found that the maximum value of the right-handlimit of (26) cannot be less than cos(120575) that is
max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
minus cos 120575 gt 0
(31)
Equation (31) then is converted to
max0leV119911leV119911max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(32)
where
V119911max =
radic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(33)
In order to obtain the maximum value of (32) another func-tion 119891 is created
119891 =
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(34)
The contour line figure of albatrossrsquo max119891 and V119911 max is
expressed in Figures 6 and 7The contour line figure of UAV demonstratorrsquos max119891 and
V119911 max is expressed in Figures 8 and 9
From Figure 6 it is obvious that max119891 has many valuesgreater than zeroThat is to say (31) has reasonable solutionsFrom Figure 7 the maximum value of V
119911for the albatrossrsquo
lifting balance allowance in dynamic soaring can be foundFor example if the lift coefficient of albatross (119862
119871 albatross) is 1and the gradient of the wind field (119866
119882) is 1 in Figure 6 the
value of max119891 is 04 Compared with Figure 7 V119911= 9ms
combining with (20) it can be found that V = 170ms Thatis to say when albatrossrsquo airspeed reaches 170ms there existsequilibrium point in this wind field Just getting the value ofairspeed is not enough to make conclusions The restrictionto airspeed is the bank angle of air velocity vector whichis defined as 120595 With the geometrical relationship of forces
International Journal of Aerospace Engineering 7
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
0708
0809
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 6 The contour line of (albatross) max119891
0
0
1
1
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
21
21
22
22
23
23
24
24
25
25
26
26
27
27
28
28
29
29
30
30
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 7 The contour line of (albatross) V119911 max
balanced one can acquire the space curve of V119909times V119910times V119911
which is obtained by projecting the four-dimensional spaceV119909timesV119910timesV119911times120595 into three-dimensional spaceThe fundamental
is to find out a suitable aerodynamic force to compensatethe resultant force of gravitation and inertial force From(24) (25) and (26) the value range of the bank angle is[30∘ 60∘]The albatross can reach the equilibrium position ingradient wind under these limiting conditions Similarly theequilibriumpoints forUAVdemonstrator in dynamic soaringcan be found in Figures 8 and 9
4 Conclusions
Dynamic soaring gives the albatross an ability to achieveenergy from the environment and prolong its flight endur-ance which is a guide to consider using dynamic soaring as apropulsive energy source for small UAVsThe paper presentsan equilibrium position theory of dynamic soaring whichis the forces balance during the flight At the equilibriumposition the aircraft stays in a certain speed without kineticenergy lossWhen the flight direction is upward themechan-ical energy would increase which can store energy for flight
In this paper the wind relative reference frame of aircraftis noninertial and the inertial force 119865 created by wind canbe used to do work for aircraft In the noninertial frame
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
07
08
08
09
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 8 The contour line of (UAV demonstrator) max119891
0
0
1
1
2
2
3
3
3
4
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
1717
1818
1919
2020
2121
2222
2323
2424
2525
2626
2727
2828
2929
3030
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 9 The contour line of (UAV demonstrator) V119911 max
the mechanical energy variation of the aircraft equals theenergy caused by drag and inertial force When the windgradient 119866
119882gt 0 and V
119911V119909gt 0 (V
119909 V119911are the airspeed
component in the direction of positive 119909-axis and 119911-axis)the inertial force (119865) does positive work to the aircraft Themechanical energy variation for unit mass is influenced bywind gradient mass (119898) and drag coefficient
Because of the existence of the gradient wind field thereare some balance points during dynamic soaring no matterhow parameters are chosen In the contour line figures ofalbatrossrsquo max119891 and V
119911 max it is easy to find out that themax-imum value of V
119911 albatross lift coefficient (119862119871 albatross) airspeed
(V) and bank angle (120595) and the gradient of the wind field arerequired by the dynamic soaring balance points By meansof performances comparison between UAV demonstratorand albatross it is manageable to apply dynamic soaring inengineering practice
Finally in order to make dynamic soaring profit fromfurther research work as soon as possible dynamic soaringexperiments are necessary Furthermore an investigationwith theory of balances for 6 DOF aircraft model would behelpful for instructing the dynamic soaring experiments
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
8 International Journal of Aerospace Engineering
Acknowledgment
The authors gratefully acknowledge the financial supportfrom the Fundamental Research Funds for the CentralUniversities (Project no CDJZR14325501)
References
[1] D Weatherington and U Deputy Unmanned Aircraft SystemsRoadmap 2005ndash2030 Deputy UAV Planning Task ForceOUSD (ATampL) 2005
[2] Y J Zhao and Y C Qi ldquoMinimum fuel powered dynamicsoaring of unmanned aerial vehicles utilizing wind gradientsrdquoOptimal Control Applications and Methods vol 25 no 5 pp211ndash233 2004
[3] P L Richardson ldquoHow do albatrosses fly around the worldwithout flapping their wingsrdquo Progress in Oceanography vol88 no 1ndash4 pp 46ndash58 2011
[4] G Sachs ldquoMinimum shear wind strength required for dynamicsoaring of albatrossesrdquo Ibis vol 147 no 1 pp 1ndash10 2005
[5] G C Bower Boundary layer dynamic soaring for autonomousaircraft design and validation [PhD thesis] Stanford Univer-sity Stanford Calif USA 2011
[6] J W S Rayleigh ldquoThe soaring of birdsrdquo Nature vol 27 no 701pp 534ndash535 1883
[7] N R J Lawrance and S Sukkarieh ldquoAutonomous exploration ofawind fieldwith a gliding aircraftrdquo Journal of Guidance Controland Dynamics vol 34 no 3 pp 719ndash733 2011
[8] N R J Lawrance Autonomous soaring flight for unmannedaerial vehicles [PhD thesis] University of Sydney SydneyAustralia 2011
[9] J LGrenestedtOnDynamic SoaringMAEDepartmental Sem-inars Princeton University Press Princeton NJ USA 2010
[10] MDeittert C A Toomer A Richards andA Pipe ldquoEnginelessunmanned aerial vehicle propulsion by dynamic soaringrdquoJournal of Guidance Control and Dynamics vol 32 no 5 pp1446ndash1457 2009
[11] J C D Cone A Mathematical Analysis of the Dynamic SoaringFlight of the Albatross with Ecological Interpretations VirginiaInstitute of Marine Science Gloucester Point Va USA 1964
[12] L Peter ldquoWind energy extraction by birds and flight vehiclesrdquoin Proceedings of the 43rd AIAA Aerospace Sciences Meeting andExhibit American Institute of Aeronautics and AstronauticsReno Nev USA January 2005
[13] P P Sukumar and M S Selig ldquoDynamic soaring of sailplanesover open fieldsrdquo Journal of Aircraft vol 50 no 5 pp 1420ndash1430 2013
[14] B Ricardo G Anouck A Mariam and S Joao ldquoShear windestimationrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference American Institute of Aeronautics andAstronautics Portland Ore USA August 2011
[15] J V Jose and E J Saletan Classical Dynamics A ContemporaryApproach Cambridge University Press Cambridge UK 1998
[16] Y J Zhao ldquoOptimal patterns of glider dynamic soaringrdquo Opti-mal Control Applications and Methods vol 25 no 2 pp 67ndash892004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Aerospace Engineering
the variation of altitude or the variation of potential energyThat is to say as long as there was wind gradient (119866
119882) in the
wind field the aircraft could extract energy from the windfield in the suitable V
119909and V
119911 In (14) the drag (119863) makes
negative work all the time but inertial force (119865119894) does positive
or negative work to the aircraft depending on the specificcases If 119866
119882gt 0 and V
119911V119909gt 0 in this case inertial force (119865
119894)
does positive work to the aircraft For the wind field 119866119882gt 0
the following relation must hold
V119909gt 0
V119911gt 0
or V119909lt 0
V119911lt 0
(15)
That is the aircraft climbs in the positive direction of 119909-119911or dives in the negative direction of 119909-119911 the aircraft extractsenergy If the maneuver is reversed the aircraft loses energyThe mechanical energy of the aircraft is denoted as 119864
119898 The
variation of mechanical energy is equal to the energy causedby drag and inertial forceThe identity element of mechanicalenergy can be expressed as
119889119864119898= 119863 sdot 119889119897 + 119898119866
119908V119911119889119909
= minus119875119863 V2sdot 119889119897 + 119898 sdot 119866
119882sdot V119911sdot 119889119909
= 119898(119875119863 V3sdot 119889119905 + 119866
119882sdot V119911sdot119889119909
119889119905sdot 119889119905)
= 119898 sdot 119889119905 (minus119875119863
119898V3 + 119866119882 sdot V119911 sdot V119909)
(16)
So the unit mass power of mechanical energy is
1
119898
119889119864119898
119889119905= minus
119875119863
119898V3 + 119866119882 sdot V119911 (119905) sdot V119909 (119905) (17)
where v is the airspeed Actually (17) and (14) mean the samethings
23 The Balance Points of Dynamic Soaring In the point ofbalance the composition of driving force vectors is zero andthe resultant force of aircraft is zero The dynamical equationin noninertial system can be expressed as
997888119871 +
997888119863 + 119898
997888119892 + 119898119866
119908V119911
997888119894 =
9978880 (18)
Because the ground speed of the aircraft remains constantin the balance point that is to say the kinetic energy of theflight system remains constant When V
119911gt 0 the potential
energy of the flight system increases with increase in flightaltitude and the mechanical energy increases at the sametime On the other hand when V
119911lt 0 the mechanical energy
of the aircraft would not always increase in which case somestudies need to be done in the future Here the balance pointis called lifting balance point when V
119911gt 0 while when V
119911lt 0
the balance point is called descending balance point When
V119911= 0 there is no balance point because there is no inertial
force to compensate the dragAlternatively (18) can be expressed in another way
radic1198712 + 1198632 = radic11989821198922 + 11989821198662119882V2119911 (19)
Combining (5)-(6) (10) and (19) there is
V4 =11989821198922+ 11989821198662
119882V2119911
1205782119886
(20)
where
1205782
119886=1
4(120588211987821198622
119871+ 120588211987821198622
119863) (21)
Equation (20) describes the relationship between V and V119911
in the balance point Simultaneously (20) ensured that thesize of aerodynamic force is equal to the resultant force ofgravitation and inertial force
Then the only restriction to airspeed is the bank angle ofair velocity vector which is defined as 120595 There is a uniquebank angle to enable forces to be balanced it is necessary tofigure out that the bank angle whichmade the included anglebetween air velocity vector (V) and 119865
1 is 1205751 where 119865
1is the
resultant force of gravity (119898119892) and inertial force (119898119866119882V119911) In
Figure 3 the included angle between airspeed vector (V) and1198651can be repressed as
cos 1205751=
9978881198651sdot997888V
100381610038161003816100381611986511003816100381610038161003816 sdot |V|
(22)
When 120575 = 1205751 in this case the aerodynamic force appears
to get across the inverse direction of the resultant force ofgravitation and inertial force Hence
cos 1205751=
9978881198651sdot997888V
100381610038161003816100381611986511003816100381610038161003816 sdot |V|
= cos 120575 = 119863
radic1198712 + 1198632 (23)
With the geometrical relationship of forces balanced onecan acquire the space curve of V
119909times V119910times V119911 which is obtained
by projecting the four-dimensional space V119909times V119910times V119911times120595 into
three-dimensional space The fundamental is to find out asuitable aerodynamic force to compensate the resultant forceof gravitation and inertial force
The resultant force of gravitation and inertial force997888119865 = [119898119866
119882V119911 0 minus119898119892] air velocity vector 997888V = [V
119903cos(120595)
V119903sin(120595) V
119911] and V
119903= radicV2 minus V2
119911 combining (20) and (23)
there is
119898
120578119886
119866119882V119911radicradic
11989821198922 + 11989821198662119882V2119911
1205782119886
minus V2119911cos120595 minus 119898
120578119886
V119911119892
= (11989821198662119882V2119911+ 11989821198922
1205782119886
)
34
cos 120575
(24)
International Journal of Aerospace Engineering 5
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
Figure 4 The extent of V119911 three typical values of 119866
119882 119862119871are selected which can tell the relationship between albatrossrsquo V
119911 119866119882 and 119862
119871
Let
119896 =119898
120578119886
=119898
119878sdot
2
120588radic1198622119871+ 1198622119863
(25)
where119898119878 is the wing loadingFrom (24) and (25)
cos 120575 = 119891 (V119911)
=
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(26)
which is subjected to the constraint
V4119911minus 11989621198662
119882V2119911minus 11989621198922le 0 (27)
Obviously there are two roots for (27) a positive root and anegative root Moreover the value of positive root is greaterthan the absolute value of negative root Thus there is
minusradic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2le V119911
leradic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(28)
which is one of constraint conditions for the solution of (26)
3 Simulation Results and Discussions
Because there is no closed form solution for the balancepoints in dynamic soaring numerical investigations arecarried out instead As dynamic soaring flight is directly
Table 1 Albatross and UAV demonstrator parameter values used
Parameter Albatross UAV demonstratorMass [kg] 85 55Wing area 119878 [m2] 065 068088Aspect ratio 1681 1681Span [m] 3306 261120588 [kgm3] 122 1221198621198630
0033 0033119864max 20 21
inspired by albatross wandering albatrossrsquo parameters usedby Sachs [4] are assumed Based on the architecture of awandering albatross an aircraft demonstrator model is usedas a reference The UAV demonstrator has similarities indimension as well as the performances with albatross Thiswill ensure that the performances of the aircraft model areachievable by an engineering-designed vehicle The param-eter values of albatross and UAV demonstrator are givenin Table 1 where 119864max is the maximum lift-to-drag ratioCompared with the albatross the UAV demonstrator hasa lighter mass Furthermore the flying ability close to theground surface of the UAV demonstrator is limited whilealbatross can fly with a wing tip touching the water Forthe reason of security the UAV demonstrator has a smallerwingspan The aerofoil of UAV demonstrator is E214 whichmakes the vehicle have a better performance than albatrossreaching a maximum lift-to-drag ratio of 21
From (26) it can be found that the relationship betweenvariables cos(120575) and cos(120595) is linear and the value of cos(120595)is located in the interval [minus1 1] so the range of cos(120575) can bedefined The extent of albatrossrsquo V
119911and UAV demonstratorrsquos
V119911is shown in Figures 4 and 5 respectivelyIn Figures 4 and 5 the black horizontal dotted line
represents cos(120575) The solid curve represents the variation of
6 International Journal of Aerospace Engineering
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
Figure 5 The extent of UAV demonstratorrsquos V119911 three typical values of 119866
119882 119862119871are selected
minus119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892radic119896(1198922 + 1198662
119882V2119911)34
The dotted curve represents119866119882sdotV119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus
V119911119892radic119896(1198922 +1198662
119882V2119911)34 From Figures 4 and 5 it can be found
that no matter what set of parameters (119866119882 119862119871) are selected
there always exists a balance point in the course of dynamicsoaring In the range of V
119911lt 0 the maximum value of the
solid line is greater than one and solid line and dotted line gothrough the original point That is cos(120575) has correspondingvalue in the area of V
119911lt 0 Furthermore in the area of V
119911gt 0
the right-hand limit of (28) includes values which are greaterthan zero then the expression of right-hand limit should bein the phase of lifting at zero point and the derived functionof right-hand limit should be greater than zero at zero pointthat is
1198911015840(V119911)V119911=0=119866119882radic119896119892 minus 119892
1198961198923gt 0 (29)
Hence
119866119882gt radic
119892
119896 (30)
In (30) there is not enough evidence to say that thereexists balance point in the area of V
119911gt 0 From Figures 4 and
5 it can be found that the maximum value of the right-handlimit of (26) cannot be less than cos(120575) that is
max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
minus cos 120575 gt 0
(31)
Equation (31) then is converted to
max0leV119911leV119911max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(32)
where
V119911max =
radic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(33)
In order to obtain the maximum value of (32) another func-tion 119891 is created
119891 =
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(34)
The contour line figure of albatrossrsquo max119891 and V119911 max is
expressed in Figures 6 and 7The contour line figure of UAV demonstratorrsquos max119891 and
V119911 max is expressed in Figures 8 and 9
From Figure 6 it is obvious that max119891 has many valuesgreater than zeroThat is to say (31) has reasonable solutionsFrom Figure 7 the maximum value of V
119911for the albatrossrsquo
lifting balance allowance in dynamic soaring can be foundFor example if the lift coefficient of albatross (119862
119871 albatross) is 1and the gradient of the wind field (119866
119882) is 1 in Figure 6 the
value of max119891 is 04 Compared with Figure 7 V119911= 9ms
combining with (20) it can be found that V = 170ms Thatis to say when albatrossrsquo airspeed reaches 170ms there existsequilibrium point in this wind field Just getting the value ofairspeed is not enough to make conclusions The restrictionto airspeed is the bank angle of air velocity vector whichis defined as 120595 With the geometrical relationship of forces
International Journal of Aerospace Engineering 7
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
0708
0809
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 6 The contour line of (albatross) max119891
0
0
1
1
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
21
21
22
22
23
23
24
24
25
25
26
26
27
27
28
28
29
29
30
30
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 7 The contour line of (albatross) V119911 max
balanced one can acquire the space curve of V119909times V119910times V119911
which is obtained by projecting the four-dimensional spaceV119909timesV119910timesV119911times120595 into three-dimensional spaceThe fundamental
is to find out a suitable aerodynamic force to compensatethe resultant force of gravitation and inertial force From(24) (25) and (26) the value range of the bank angle is[30∘ 60∘]The albatross can reach the equilibrium position ingradient wind under these limiting conditions Similarly theequilibriumpoints forUAVdemonstrator in dynamic soaringcan be found in Figures 8 and 9
4 Conclusions
Dynamic soaring gives the albatross an ability to achieveenergy from the environment and prolong its flight endur-ance which is a guide to consider using dynamic soaring as apropulsive energy source for small UAVsThe paper presentsan equilibrium position theory of dynamic soaring whichis the forces balance during the flight At the equilibriumposition the aircraft stays in a certain speed without kineticenergy lossWhen the flight direction is upward themechan-ical energy would increase which can store energy for flight
In this paper the wind relative reference frame of aircraftis noninertial and the inertial force 119865 created by wind canbe used to do work for aircraft In the noninertial frame
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
07
08
08
09
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 8 The contour line of (UAV demonstrator) max119891
0
0
1
1
2
2
3
3
3
4
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
1717
1818
1919
2020
2121
2222
2323
2424
2525
2626
2727
2828
2929
3030
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 9 The contour line of (UAV demonstrator) V119911 max
the mechanical energy variation of the aircraft equals theenergy caused by drag and inertial force When the windgradient 119866
119882gt 0 and V
119911V119909gt 0 (V
119909 V119911are the airspeed
component in the direction of positive 119909-axis and 119911-axis)the inertial force (119865) does positive work to the aircraft Themechanical energy variation for unit mass is influenced bywind gradient mass (119898) and drag coefficient
Because of the existence of the gradient wind field thereare some balance points during dynamic soaring no matterhow parameters are chosen In the contour line figures ofalbatrossrsquo max119891 and V
119911 max it is easy to find out that themax-imum value of V
119911 albatross lift coefficient (119862119871 albatross) airspeed
(V) and bank angle (120595) and the gradient of the wind field arerequired by the dynamic soaring balance points By meansof performances comparison between UAV demonstratorand albatross it is manageable to apply dynamic soaring inengineering practice
Finally in order to make dynamic soaring profit fromfurther research work as soon as possible dynamic soaringexperiments are necessary Furthermore an investigationwith theory of balances for 6 DOF aircraft model would behelpful for instructing the dynamic soaring experiments
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
8 International Journal of Aerospace Engineering
Acknowledgment
The authors gratefully acknowledge the financial supportfrom the Fundamental Research Funds for the CentralUniversities (Project no CDJZR14325501)
References
[1] D Weatherington and U Deputy Unmanned Aircraft SystemsRoadmap 2005ndash2030 Deputy UAV Planning Task ForceOUSD (ATampL) 2005
[2] Y J Zhao and Y C Qi ldquoMinimum fuel powered dynamicsoaring of unmanned aerial vehicles utilizing wind gradientsrdquoOptimal Control Applications and Methods vol 25 no 5 pp211ndash233 2004
[3] P L Richardson ldquoHow do albatrosses fly around the worldwithout flapping their wingsrdquo Progress in Oceanography vol88 no 1ndash4 pp 46ndash58 2011
[4] G Sachs ldquoMinimum shear wind strength required for dynamicsoaring of albatrossesrdquo Ibis vol 147 no 1 pp 1ndash10 2005
[5] G C Bower Boundary layer dynamic soaring for autonomousaircraft design and validation [PhD thesis] Stanford Univer-sity Stanford Calif USA 2011
[6] J W S Rayleigh ldquoThe soaring of birdsrdquo Nature vol 27 no 701pp 534ndash535 1883
[7] N R J Lawrance and S Sukkarieh ldquoAutonomous exploration ofawind fieldwith a gliding aircraftrdquo Journal of Guidance Controland Dynamics vol 34 no 3 pp 719ndash733 2011
[8] N R J Lawrance Autonomous soaring flight for unmannedaerial vehicles [PhD thesis] University of Sydney SydneyAustralia 2011
[9] J LGrenestedtOnDynamic SoaringMAEDepartmental Sem-inars Princeton University Press Princeton NJ USA 2010
[10] MDeittert C A Toomer A Richards andA Pipe ldquoEnginelessunmanned aerial vehicle propulsion by dynamic soaringrdquoJournal of Guidance Control and Dynamics vol 32 no 5 pp1446ndash1457 2009
[11] J C D Cone A Mathematical Analysis of the Dynamic SoaringFlight of the Albatross with Ecological Interpretations VirginiaInstitute of Marine Science Gloucester Point Va USA 1964
[12] L Peter ldquoWind energy extraction by birds and flight vehiclesrdquoin Proceedings of the 43rd AIAA Aerospace Sciences Meeting andExhibit American Institute of Aeronautics and AstronauticsReno Nev USA January 2005
[13] P P Sukumar and M S Selig ldquoDynamic soaring of sailplanesover open fieldsrdquo Journal of Aircraft vol 50 no 5 pp 1420ndash1430 2013
[14] B Ricardo G Anouck A Mariam and S Joao ldquoShear windestimationrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference American Institute of Aeronautics andAstronautics Portland Ore USA August 2011
[15] J V Jose and E J Saletan Classical Dynamics A ContemporaryApproach Cambridge University Press Cambridge UK 1998
[16] Y J Zhao ldquoOptimal patterns of glider dynamic soaringrdquo Opti-mal Control Applications and Methods vol 25 no 2 pp 67ndash892004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 5
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
Figure 4 The extent of V119911 three typical values of 119866
119882 119862119871are selected which can tell the relationship between albatrossrsquo V
119911 119866119882 and 119862
119871
Let
119896 =119898
120578119886
=119898
119878sdot
2
120588radic1198622119871+ 1198622119863
(25)
where119898119878 is the wing loadingFrom (24) and (25)
cos 120575 = 119891 (V119911)
=
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(26)
which is subjected to the constraint
V4119911minus 11989621198662
119882V2119911minus 11989621198922le 0 (27)
Obviously there are two roots for (27) a positive root and anegative root Moreover the value of positive root is greaterthan the absolute value of negative root Thus there is
minusradic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2le V119911
leradic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(28)
which is one of constraint conditions for the solution of (26)
3 Simulation Results and Discussions
Because there is no closed form solution for the balancepoints in dynamic soaring numerical investigations arecarried out instead As dynamic soaring flight is directly
Table 1 Albatross and UAV demonstrator parameter values used
Parameter Albatross UAV demonstratorMass [kg] 85 55Wing area 119878 [m2] 065 068088Aspect ratio 1681 1681Span [m] 3306 261120588 [kgm3] 122 1221198621198630
0033 0033119864max 20 21
inspired by albatross wandering albatrossrsquo parameters usedby Sachs [4] are assumed Based on the architecture of awandering albatross an aircraft demonstrator model is usedas a reference The UAV demonstrator has similarities indimension as well as the performances with albatross Thiswill ensure that the performances of the aircraft model areachievable by an engineering-designed vehicle The param-eter values of albatross and UAV demonstrator are givenin Table 1 where 119864max is the maximum lift-to-drag ratioCompared with the albatross the UAV demonstrator hasa lighter mass Furthermore the flying ability close to theground surface of the UAV demonstrator is limited whilealbatross can fly with a wing tip touching the water Forthe reason of security the UAV demonstrator has a smallerwingspan The aerofoil of UAV demonstrator is E214 whichmakes the vehicle have a better performance than albatrossreaching a maximum lift-to-drag ratio of 21
From (26) it can be found that the relationship betweenvariables cos(120575) and cos(120595) is linear and the value of cos(120595)is located in the interval [minus1 1] so the range of cos(120575) can bedefined The extent of albatrossrsquo V
119911and UAV demonstratorrsquos
V119911is shown in Figures 4 and 5 respectivelyIn Figures 4 and 5 the black horizontal dotted line
represents cos(120575) The solid curve represents the variation of
6 International Journal of Aerospace Engineering
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
Figure 5 The extent of UAV demonstratorrsquos V119911 three typical values of 119866
119882 119862119871are selected
minus119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892radic119896(1198922 + 1198662
119882V2119911)34
The dotted curve represents119866119882sdotV119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus
V119911119892radic119896(1198922 +1198662
119882V2119911)34 From Figures 4 and 5 it can be found
that no matter what set of parameters (119866119882 119862119871) are selected
there always exists a balance point in the course of dynamicsoaring In the range of V
119911lt 0 the maximum value of the
solid line is greater than one and solid line and dotted line gothrough the original point That is cos(120575) has correspondingvalue in the area of V
119911lt 0 Furthermore in the area of V
119911gt 0
the right-hand limit of (28) includes values which are greaterthan zero then the expression of right-hand limit should bein the phase of lifting at zero point and the derived functionof right-hand limit should be greater than zero at zero pointthat is
1198911015840(V119911)V119911=0=119866119882radic119896119892 minus 119892
1198961198923gt 0 (29)
Hence
119866119882gt radic
119892
119896 (30)
In (30) there is not enough evidence to say that thereexists balance point in the area of V
119911gt 0 From Figures 4 and
5 it can be found that the maximum value of the right-handlimit of (26) cannot be less than cos(120575) that is
max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
minus cos 120575 gt 0
(31)
Equation (31) then is converted to
max0leV119911leV119911max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(32)
where
V119911max =
radic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(33)
In order to obtain the maximum value of (32) another func-tion 119891 is created
119891 =
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(34)
The contour line figure of albatrossrsquo max119891 and V119911 max is
expressed in Figures 6 and 7The contour line figure of UAV demonstratorrsquos max119891 and
V119911 max is expressed in Figures 8 and 9
From Figure 6 it is obvious that max119891 has many valuesgreater than zeroThat is to say (31) has reasonable solutionsFrom Figure 7 the maximum value of V
119911for the albatrossrsquo
lifting balance allowance in dynamic soaring can be foundFor example if the lift coefficient of albatross (119862
119871 albatross) is 1and the gradient of the wind field (119866
119882) is 1 in Figure 6 the
value of max119891 is 04 Compared with Figure 7 V119911= 9ms
combining with (20) it can be found that V = 170ms Thatis to say when albatrossrsquo airspeed reaches 170ms there existsequilibrium point in this wind field Just getting the value ofairspeed is not enough to make conclusions The restrictionto airspeed is the bank angle of air velocity vector whichis defined as 120595 With the geometrical relationship of forces
International Journal of Aerospace Engineering 7
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
0708
0809
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 6 The contour line of (albatross) max119891
0
0
1
1
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
21
21
22
22
23
23
24
24
25
25
26
26
27
27
28
28
29
29
30
30
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 7 The contour line of (albatross) V119911 max
balanced one can acquire the space curve of V119909times V119910times V119911
which is obtained by projecting the four-dimensional spaceV119909timesV119910timesV119911times120595 into three-dimensional spaceThe fundamental
is to find out a suitable aerodynamic force to compensatethe resultant force of gravitation and inertial force From(24) (25) and (26) the value range of the bank angle is[30∘ 60∘]The albatross can reach the equilibrium position ingradient wind under these limiting conditions Similarly theequilibriumpoints forUAVdemonstrator in dynamic soaringcan be found in Figures 8 and 9
4 Conclusions
Dynamic soaring gives the albatross an ability to achieveenergy from the environment and prolong its flight endur-ance which is a guide to consider using dynamic soaring as apropulsive energy source for small UAVsThe paper presentsan equilibrium position theory of dynamic soaring whichis the forces balance during the flight At the equilibriumposition the aircraft stays in a certain speed without kineticenergy lossWhen the flight direction is upward themechan-ical energy would increase which can store energy for flight
In this paper the wind relative reference frame of aircraftis noninertial and the inertial force 119865 created by wind canbe used to do work for aircraft In the noninertial frame
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
07
08
08
09
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 8 The contour line of (UAV demonstrator) max119891
0
0
1
1
2
2
3
3
3
4
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
1717
1818
1919
2020
2121
2222
2323
2424
2525
2626
2727
2828
2929
3030
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 9 The contour line of (UAV demonstrator) V119911 max
the mechanical energy variation of the aircraft equals theenergy caused by drag and inertial force When the windgradient 119866
119882gt 0 and V
119911V119909gt 0 (V
119909 V119911are the airspeed
component in the direction of positive 119909-axis and 119911-axis)the inertial force (119865) does positive work to the aircraft Themechanical energy variation for unit mass is influenced bywind gradient mass (119898) and drag coefficient
Because of the existence of the gradient wind field thereare some balance points during dynamic soaring no matterhow parameters are chosen In the contour line figures ofalbatrossrsquo max119891 and V
119911 max it is easy to find out that themax-imum value of V
119911 albatross lift coefficient (119862119871 albatross) airspeed
(V) and bank angle (120595) and the gradient of the wind field arerequired by the dynamic soaring balance points By meansof performances comparison between UAV demonstratorand albatross it is manageable to apply dynamic soaring inengineering practice
Finally in order to make dynamic soaring profit fromfurther research work as soon as possible dynamic soaringexperiments are necessary Furthermore an investigationwith theory of balances for 6 DOF aircraft model would behelpful for instructing the dynamic soaring experiments
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
8 International Journal of Aerospace Engineering
Acknowledgment
The authors gratefully acknowledge the financial supportfrom the Fundamental Research Funds for the CentralUniversities (Project no CDJZR14325501)
References
[1] D Weatherington and U Deputy Unmanned Aircraft SystemsRoadmap 2005ndash2030 Deputy UAV Planning Task ForceOUSD (ATampL) 2005
[2] Y J Zhao and Y C Qi ldquoMinimum fuel powered dynamicsoaring of unmanned aerial vehicles utilizing wind gradientsrdquoOptimal Control Applications and Methods vol 25 no 5 pp211ndash233 2004
[3] P L Richardson ldquoHow do albatrosses fly around the worldwithout flapping their wingsrdquo Progress in Oceanography vol88 no 1ndash4 pp 46ndash58 2011
[4] G Sachs ldquoMinimum shear wind strength required for dynamicsoaring of albatrossesrdquo Ibis vol 147 no 1 pp 1ndash10 2005
[5] G C Bower Boundary layer dynamic soaring for autonomousaircraft design and validation [PhD thesis] Stanford Univer-sity Stanford Calif USA 2011
[6] J W S Rayleigh ldquoThe soaring of birdsrdquo Nature vol 27 no 701pp 534ndash535 1883
[7] N R J Lawrance and S Sukkarieh ldquoAutonomous exploration ofawind fieldwith a gliding aircraftrdquo Journal of Guidance Controland Dynamics vol 34 no 3 pp 719ndash733 2011
[8] N R J Lawrance Autonomous soaring flight for unmannedaerial vehicles [PhD thesis] University of Sydney SydneyAustralia 2011
[9] J LGrenestedtOnDynamic SoaringMAEDepartmental Sem-inars Princeton University Press Princeton NJ USA 2010
[10] MDeittert C A Toomer A Richards andA Pipe ldquoEnginelessunmanned aerial vehicle propulsion by dynamic soaringrdquoJournal of Guidance Control and Dynamics vol 32 no 5 pp1446ndash1457 2009
[11] J C D Cone A Mathematical Analysis of the Dynamic SoaringFlight of the Albatross with Ecological Interpretations VirginiaInstitute of Marine Science Gloucester Point Va USA 1964
[12] L Peter ldquoWind energy extraction by birds and flight vehiclesrdquoin Proceedings of the 43rd AIAA Aerospace Sciences Meeting andExhibit American Institute of Aeronautics and AstronauticsReno Nev USA January 2005
[13] P P Sukumar and M S Selig ldquoDynamic soaring of sailplanesover open fieldsrdquo Journal of Aircraft vol 50 no 5 pp 1420ndash1430 2013
[14] B Ricardo G Anouck A Mariam and S Joao ldquoShear windestimationrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference American Institute of Aeronautics andAstronautics Portland Ore USA August 2011
[15] J V Jose and E J Saletan Classical Dynamics A ContemporaryApproach Cambridge University Press Cambridge UK 1998
[16] Y J Zhao ldquoOptimal patterns of glider dynamic soaringrdquo Opti-mal Control Applications and Methods vol 25 no 2 pp 67ndash892004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Aerospace Engineering
GW = 05
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(a) When 119866119882 = 05 119862119871 = 05 10 and 15 theextent of V119911
GW = 10
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(b) When 119866119882 = 10 119862119871 = 05 10 and 15 theextent of V119911
GW = 15
z
minus30 minus20 minus10 0 10 20 30
1
05
minus05
minus1
CL = 05
CL = 05
CL = 15
CL = 15
CL = 10
CL = 10
(c) When 119866119882 = 15 119862119871 = 05 10 and 15 theextent of V119911
Figure 5 The extent of UAV demonstratorrsquos V119911 three typical values of 119866
119882 119862119871are selected
minus119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892radic119896(1198922 + 1198662
119882V2119911)34
The dotted curve represents119866119882sdotV119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus
V119911119892radic119896(1198922 +1198662
119882V2119911)34 From Figures 4 and 5 it can be found
that no matter what set of parameters (119866119882 119862119871) are selected
there always exists a balance point in the course of dynamicsoaring In the range of V
119911lt 0 the maximum value of the
solid line is greater than one and solid line and dotted line gothrough the original point That is cos(120575) has correspondingvalue in the area of V
119911lt 0 Furthermore in the area of V
119911gt 0
the right-hand limit of (28) includes values which are greaterthan zero then the expression of right-hand limit should bein the phase of lifting at zero point and the derived functionof right-hand limit should be greater than zero at zero pointthat is
1198911015840(V119911)V119911=0=119866119882radic119896119892 minus 119892
1198961198923gt 0 (29)
Hence
119866119882gt radic
119892
119896 (30)
In (30) there is not enough evidence to say that thereexists balance point in the area of V
119911gt 0 From Figures 4 and
5 it can be found that the maximum value of the right-handlimit of (26) cannot be less than cos(120575) that is
max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
minus cos 120575 gt 0
(31)
Equation (31) then is converted to
max0leV119911leV119911max
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911cos120595 minus V
119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(32)
where
V119911max =
radic 11989621198662119882+ radic11989641198664
119882+ 411989621198922
2
(33)
In order to obtain the maximum value of (32) another func-tion 119891 is created
119891 =
119866119882sdot V119911radicradic11989621198922 + 11989621198662
119882V2119911minus V2119911minus V119911119892
radic119896 (1198922 + 1198662119882V2119911)34
(34)
The contour line figure of albatrossrsquo max119891 and V119911 max is
expressed in Figures 6 and 7The contour line figure of UAV demonstratorrsquos max119891 and
V119911 max is expressed in Figures 8 and 9
From Figure 6 it is obvious that max119891 has many valuesgreater than zeroThat is to say (31) has reasonable solutionsFrom Figure 7 the maximum value of V
119911for the albatrossrsquo
lifting balance allowance in dynamic soaring can be foundFor example if the lift coefficient of albatross (119862
119871 albatross) is 1and the gradient of the wind field (119866
119882) is 1 in Figure 6 the
value of max119891 is 04 Compared with Figure 7 V119911= 9ms
combining with (20) it can be found that V = 170ms Thatis to say when albatrossrsquo airspeed reaches 170ms there existsequilibrium point in this wind field Just getting the value ofairspeed is not enough to make conclusions The restrictionto airspeed is the bank angle of air velocity vector whichis defined as 120595 With the geometrical relationship of forces
International Journal of Aerospace Engineering 7
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
0708
0809
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 6 The contour line of (albatross) max119891
0
0
1
1
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
21
21
22
22
23
23
24
24
25
25
26
26
27
27
28
28
29
29
30
30
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 7 The contour line of (albatross) V119911 max
balanced one can acquire the space curve of V119909times V119910times V119911
which is obtained by projecting the four-dimensional spaceV119909timesV119910timesV119911times120595 into three-dimensional spaceThe fundamental
is to find out a suitable aerodynamic force to compensatethe resultant force of gravitation and inertial force From(24) (25) and (26) the value range of the bank angle is[30∘ 60∘]The albatross can reach the equilibrium position ingradient wind under these limiting conditions Similarly theequilibriumpoints forUAVdemonstrator in dynamic soaringcan be found in Figures 8 and 9
4 Conclusions
Dynamic soaring gives the albatross an ability to achieveenergy from the environment and prolong its flight endur-ance which is a guide to consider using dynamic soaring as apropulsive energy source for small UAVsThe paper presentsan equilibrium position theory of dynamic soaring whichis the forces balance during the flight At the equilibriumposition the aircraft stays in a certain speed without kineticenergy lossWhen the flight direction is upward themechan-ical energy would increase which can store energy for flight
In this paper the wind relative reference frame of aircraftis noninertial and the inertial force 119865 created by wind canbe used to do work for aircraft In the noninertial frame
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
07
08
08
09
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 8 The contour line of (UAV demonstrator) max119891
0
0
1
1
2
2
3
3
3
4
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
1717
1818
1919
2020
2121
2222
2323
2424
2525
2626
2727
2828
2929
3030
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 9 The contour line of (UAV demonstrator) V119911 max
the mechanical energy variation of the aircraft equals theenergy caused by drag and inertial force When the windgradient 119866
119882gt 0 and V
119911V119909gt 0 (V
119909 V119911are the airspeed
component in the direction of positive 119909-axis and 119911-axis)the inertial force (119865) does positive work to the aircraft Themechanical energy variation for unit mass is influenced bywind gradient mass (119898) and drag coefficient
Because of the existence of the gradient wind field thereare some balance points during dynamic soaring no matterhow parameters are chosen In the contour line figures ofalbatrossrsquo max119891 and V
119911 max it is easy to find out that themax-imum value of V
119911 albatross lift coefficient (119862119871 albatross) airspeed
(V) and bank angle (120595) and the gradient of the wind field arerequired by the dynamic soaring balance points By meansof performances comparison between UAV demonstratorand albatross it is manageable to apply dynamic soaring inengineering practice
Finally in order to make dynamic soaring profit fromfurther research work as soon as possible dynamic soaringexperiments are necessary Furthermore an investigationwith theory of balances for 6 DOF aircraft model would behelpful for instructing the dynamic soaring experiments
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
8 International Journal of Aerospace Engineering
Acknowledgment
The authors gratefully acknowledge the financial supportfrom the Fundamental Research Funds for the CentralUniversities (Project no CDJZR14325501)
References
[1] D Weatherington and U Deputy Unmanned Aircraft SystemsRoadmap 2005ndash2030 Deputy UAV Planning Task ForceOUSD (ATampL) 2005
[2] Y J Zhao and Y C Qi ldquoMinimum fuel powered dynamicsoaring of unmanned aerial vehicles utilizing wind gradientsrdquoOptimal Control Applications and Methods vol 25 no 5 pp211ndash233 2004
[3] P L Richardson ldquoHow do albatrosses fly around the worldwithout flapping their wingsrdquo Progress in Oceanography vol88 no 1ndash4 pp 46ndash58 2011
[4] G Sachs ldquoMinimum shear wind strength required for dynamicsoaring of albatrossesrdquo Ibis vol 147 no 1 pp 1ndash10 2005
[5] G C Bower Boundary layer dynamic soaring for autonomousaircraft design and validation [PhD thesis] Stanford Univer-sity Stanford Calif USA 2011
[6] J W S Rayleigh ldquoThe soaring of birdsrdquo Nature vol 27 no 701pp 534ndash535 1883
[7] N R J Lawrance and S Sukkarieh ldquoAutonomous exploration ofawind fieldwith a gliding aircraftrdquo Journal of Guidance Controland Dynamics vol 34 no 3 pp 719ndash733 2011
[8] N R J Lawrance Autonomous soaring flight for unmannedaerial vehicles [PhD thesis] University of Sydney SydneyAustralia 2011
[9] J LGrenestedtOnDynamic SoaringMAEDepartmental Sem-inars Princeton University Press Princeton NJ USA 2010
[10] MDeittert C A Toomer A Richards andA Pipe ldquoEnginelessunmanned aerial vehicle propulsion by dynamic soaringrdquoJournal of Guidance Control and Dynamics vol 32 no 5 pp1446ndash1457 2009
[11] J C D Cone A Mathematical Analysis of the Dynamic SoaringFlight of the Albatross with Ecological Interpretations VirginiaInstitute of Marine Science Gloucester Point Va USA 1964
[12] L Peter ldquoWind energy extraction by birds and flight vehiclesrdquoin Proceedings of the 43rd AIAA Aerospace Sciences Meeting andExhibit American Institute of Aeronautics and AstronauticsReno Nev USA January 2005
[13] P P Sukumar and M S Selig ldquoDynamic soaring of sailplanesover open fieldsrdquo Journal of Aircraft vol 50 no 5 pp 1420ndash1430 2013
[14] B Ricardo G Anouck A Mariam and S Joao ldquoShear windestimationrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference American Institute of Aeronautics andAstronautics Portland Ore USA August 2011
[15] J V Jose and E J Saletan Classical Dynamics A ContemporaryApproach Cambridge University Press Cambridge UK 1998
[16] Y J Zhao ldquoOptimal patterns of glider dynamic soaringrdquo Opti-mal Control Applications and Methods vol 25 no 2 pp 67ndash892004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 7
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
0708
0809
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 6 The contour line of (albatross) max119891
0
0
1
1
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
21
21
22
22
23
23
24
24
25
25
26
26
27
27
28
28
29
29
30
30
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 7 The contour line of (albatross) V119911 max
balanced one can acquire the space curve of V119909times V119910times V119911
which is obtained by projecting the four-dimensional spaceV119909timesV119910timesV119911times120595 into three-dimensional spaceThe fundamental
is to find out a suitable aerodynamic force to compensatethe resultant force of gravitation and inertial force From(24) (25) and (26) the value range of the bank angle is[30∘ 60∘]The albatross can reach the equilibrium position ingradient wind under these limiting conditions Similarly theequilibriumpoints forUAVdemonstrator in dynamic soaringcan be found in Figures 8 and 9
4 Conclusions
Dynamic soaring gives the albatross an ability to achieveenergy from the environment and prolong its flight endur-ance which is a guide to consider using dynamic soaring as apropulsive energy source for small UAVsThe paper presentsan equilibrium position theory of dynamic soaring whichis the forces balance during the flight At the equilibriumposition the aircraft stays in a certain speed without kineticenergy lossWhen the flight direction is upward themechan-ical energy would increase which can store energy for flight
In this paper the wind relative reference frame of aircraftis noninertial and the inertial force 119865 created by wind canbe used to do work for aircraft In the noninertial frame
0
0
01
01
02
02
03
03
04
04
05
05
06
06
07
07
08
08
09
09
1
1
11
11
12
12
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
max f
Figure 8 The contour line of (UAV demonstrator) max119891
0
0
1
1
2
2
3
3
3
4
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
1717
1818
1919
2020
2121
2222
2323
2424
2525
2626
2727
2828
2929
3030
0 05 1 15 2 25 30
1
2
3
4
5
CL
GW
zmax
Figure 9 The contour line of (UAV demonstrator) V119911 max
the mechanical energy variation of the aircraft equals theenergy caused by drag and inertial force When the windgradient 119866
119882gt 0 and V
119911V119909gt 0 (V
119909 V119911are the airspeed
component in the direction of positive 119909-axis and 119911-axis)the inertial force (119865) does positive work to the aircraft Themechanical energy variation for unit mass is influenced bywind gradient mass (119898) and drag coefficient
Because of the existence of the gradient wind field thereare some balance points during dynamic soaring no matterhow parameters are chosen In the contour line figures ofalbatrossrsquo max119891 and V
119911 max it is easy to find out that themax-imum value of V
119911 albatross lift coefficient (119862119871 albatross) airspeed
(V) and bank angle (120595) and the gradient of the wind field arerequired by the dynamic soaring balance points By meansof performances comparison between UAV demonstratorand albatross it is manageable to apply dynamic soaring inengineering practice
Finally in order to make dynamic soaring profit fromfurther research work as soon as possible dynamic soaringexperiments are necessary Furthermore an investigationwith theory of balances for 6 DOF aircraft model would behelpful for instructing the dynamic soaring experiments
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
8 International Journal of Aerospace Engineering
Acknowledgment
The authors gratefully acknowledge the financial supportfrom the Fundamental Research Funds for the CentralUniversities (Project no CDJZR14325501)
References
[1] D Weatherington and U Deputy Unmanned Aircraft SystemsRoadmap 2005ndash2030 Deputy UAV Planning Task ForceOUSD (ATampL) 2005
[2] Y J Zhao and Y C Qi ldquoMinimum fuel powered dynamicsoaring of unmanned aerial vehicles utilizing wind gradientsrdquoOptimal Control Applications and Methods vol 25 no 5 pp211ndash233 2004
[3] P L Richardson ldquoHow do albatrosses fly around the worldwithout flapping their wingsrdquo Progress in Oceanography vol88 no 1ndash4 pp 46ndash58 2011
[4] G Sachs ldquoMinimum shear wind strength required for dynamicsoaring of albatrossesrdquo Ibis vol 147 no 1 pp 1ndash10 2005
[5] G C Bower Boundary layer dynamic soaring for autonomousaircraft design and validation [PhD thesis] Stanford Univer-sity Stanford Calif USA 2011
[6] J W S Rayleigh ldquoThe soaring of birdsrdquo Nature vol 27 no 701pp 534ndash535 1883
[7] N R J Lawrance and S Sukkarieh ldquoAutonomous exploration ofawind fieldwith a gliding aircraftrdquo Journal of Guidance Controland Dynamics vol 34 no 3 pp 719ndash733 2011
[8] N R J Lawrance Autonomous soaring flight for unmannedaerial vehicles [PhD thesis] University of Sydney SydneyAustralia 2011
[9] J LGrenestedtOnDynamic SoaringMAEDepartmental Sem-inars Princeton University Press Princeton NJ USA 2010
[10] MDeittert C A Toomer A Richards andA Pipe ldquoEnginelessunmanned aerial vehicle propulsion by dynamic soaringrdquoJournal of Guidance Control and Dynamics vol 32 no 5 pp1446ndash1457 2009
[11] J C D Cone A Mathematical Analysis of the Dynamic SoaringFlight of the Albatross with Ecological Interpretations VirginiaInstitute of Marine Science Gloucester Point Va USA 1964
[12] L Peter ldquoWind energy extraction by birds and flight vehiclesrdquoin Proceedings of the 43rd AIAA Aerospace Sciences Meeting andExhibit American Institute of Aeronautics and AstronauticsReno Nev USA January 2005
[13] P P Sukumar and M S Selig ldquoDynamic soaring of sailplanesover open fieldsrdquo Journal of Aircraft vol 50 no 5 pp 1420ndash1430 2013
[14] B Ricardo G Anouck A Mariam and S Joao ldquoShear windestimationrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference American Institute of Aeronautics andAstronautics Portland Ore USA August 2011
[15] J V Jose and E J Saletan Classical Dynamics A ContemporaryApproach Cambridge University Press Cambridge UK 1998
[16] Y J Zhao ldquoOptimal patterns of glider dynamic soaringrdquo Opti-mal Control Applications and Methods vol 25 no 2 pp 67ndash892004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Aerospace Engineering
Acknowledgment
The authors gratefully acknowledge the financial supportfrom the Fundamental Research Funds for the CentralUniversities (Project no CDJZR14325501)
References
[1] D Weatherington and U Deputy Unmanned Aircraft SystemsRoadmap 2005ndash2030 Deputy UAV Planning Task ForceOUSD (ATampL) 2005
[2] Y J Zhao and Y C Qi ldquoMinimum fuel powered dynamicsoaring of unmanned aerial vehicles utilizing wind gradientsrdquoOptimal Control Applications and Methods vol 25 no 5 pp211ndash233 2004
[3] P L Richardson ldquoHow do albatrosses fly around the worldwithout flapping their wingsrdquo Progress in Oceanography vol88 no 1ndash4 pp 46ndash58 2011
[4] G Sachs ldquoMinimum shear wind strength required for dynamicsoaring of albatrossesrdquo Ibis vol 147 no 1 pp 1ndash10 2005
[5] G C Bower Boundary layer dynamic soaring for autonomousaircraft design and validation [PhD thesis] Stanford Univer-sity Stanford Calif USA 2011
[6] J W S Rayleigh ldquoThe soaring of birdsrdquo Nature vol 27 no 701pp 534ndash535 1883
[7] N R J Lawrance and S Sukkarieh ldquoAutonomous exploration ofawind fieldwith a gliding aircraftrdquo Journal of Guidance Controland Dynamics vol 34 no 3 pp 719ndash733 2011
[8] N R J Lawrance Autonomous soaring flight for unmannedaerial vehicles [PhD thesis] University of Sydney SydneyAustralia 2011
[9] J LGrenestedtOnDynamic SoaringMAEDepartmental Sem-inars Princeton University Press Princeton NJ USA 2010
[10] MDeittert C A Toomer A Richards andA Pipe ldquoEnginelessunmanned aerial vehicle propulsion by dynamic soaringrdquoJournal of Guidance Control and Dynamics vol 32 no 5 pp1446ndash1457 2009
[11] J C D Cone A Mathematical Analysis of the Dynamic SoaringFlight of the Albatross with Ecological Interpretations VirginiaInstitute of Marine Science Gloucester Point Va USA 1964
[12] L Peter ldquoWind energy extraction by birds and flight vehiclesrdquoin Proceedings of the 43rd AIAA Aerospace Sciences Meeting andExhibit American Institute of Aeronautics and AstronauticsReno Nev USA January 2005
[13] P P Sukumar and M S Selig ldquoDynamic soaring of sailplanesover open fieldsrdquo Journal of Aircraft vol 50 no 5 pp 1420ndash1430 2013
[14] B Ricardo G Anouck A Mariam and S Joao ldquoShear windestimationrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference American Institute of Aeronautics andAstronautics Portland Ore USA August 2011
[15] J V Jose and E J Saletan Classical Dynamics A ContemporaryApproach Cambridge University Press Cambridge UK 1998
[16] Y J Zhao ldquoOptimal patterns of glider dynamic soaringrdquo Opti-mal Control Applications and Methods vol 25 no 2 pp 67ndash892004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of